【PyTorch2 之027】在 PyTorch 中的R-CNN、Fast R-CNN和 Faster R-CNN

一、说明
亮点:对象检测是计算机视觉中最重要的任务之一。在这篇文章中,我们将概述最有影响力的对象检测算法家族之一:R-CNN、Fast R-CNN 和 Faster R-CNN。我们将重点介绍它们中的每一个的主要新颖性和改进。
最后,我们将专注于 Faster R-CNN,并探索代码以及如何在 PyTorch 中使用它。
教程概述:
- 物体检测简介
- R-CNN
- 快速RCNN
- 更快的RCNN
- PyTorch 实现
二、 物体检测简介
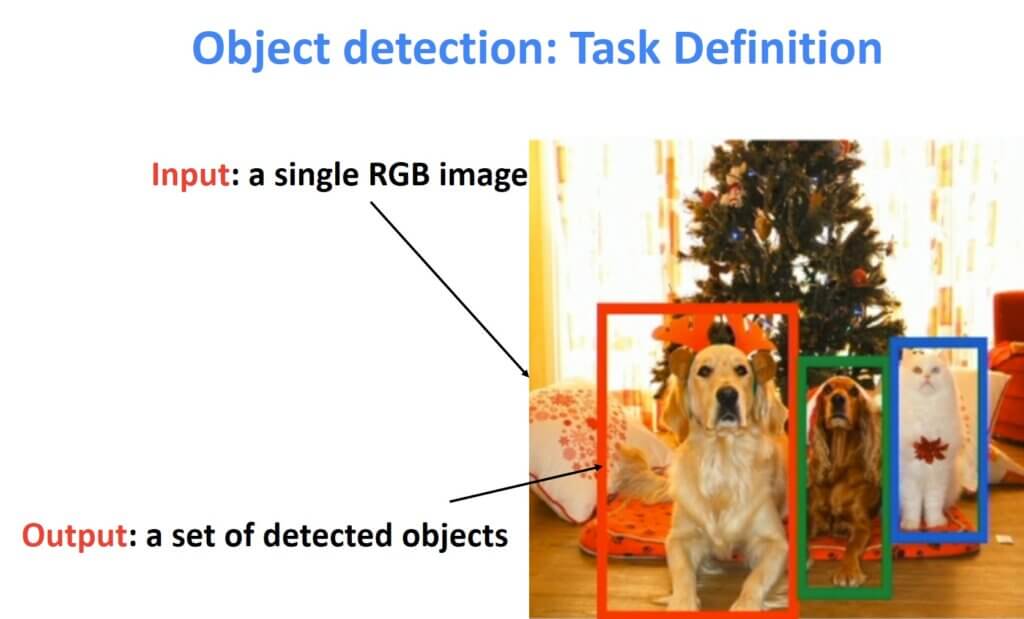
目标检测的目标可以看作是分类问题的扩展。在分类中,我们在图像中有一个占据中心图像区域的主要实例或对象。然后,我们的目标是检测图像中的内容。
对象检测类似,但更复杂。首先,我们不仅需要猜测它在图像中是什么,还需要检测它的位置。这通常是通过在对象边界框周围放置一个矩形框来完成的。这种定位是在地面实况标签方面完成的。也就是说,算法应该学习注释器的标记过程以及如何精确放置这个矩形框。从本质上讲,这可以转换为回归问题。另一方面,图像中确切内容的答案代表分类问题。
对于我们预测的每个对象:
- 图像中有什么?这是我们预测类别标签的分类任务
- 图像中的对象在哪里?这是定位任务,我们预测对象周围的边界框(4 个数字:x、y、宽度、高度)
为了更好地说明这一点,我们将回顾使用神经网络的分类。例如,我们可以有一个AlexNet。
2.1 检测单个对象
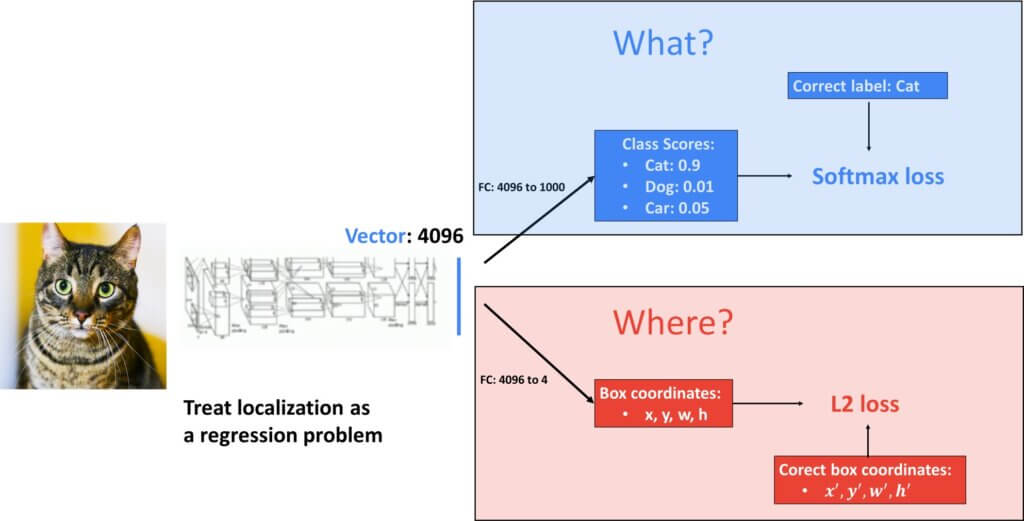
这个网络会告诉我们图像中的“什么”。为此,我们将得到一个输出分数概率向量。例如,图像中有猫的几率为 0.9。
该预测是从大小为 4096 的“最后一个”全连接层获得的,并馈送到 softmax 激活函数中。随后,该向量也可用于生成答案“哪里”猫在图像中的位置,这将被转换为回归问题。在这里,回归输出将是四个值:x、y、宽度和高度。
至于用于分类的损失函数,众所周知,我们将使用交叉熵损失。另一方面,对于回归问题,我们将使用 L2 损失函数。
现在,问题是我们有两种不同的损失。但是,我们需要一个损失函数来应用梯度下降并优化参数。好吧,解决方案被证明是相当简单的。我们将两个损失相加。也就是说,更准确地说,我们将使用加权和并调整权重参数。参数的权重将意味着这两个术语中哪个对我们更有价值。另一方面,这可以简单地用于调整两种损失的规模。
因此,我们有一个网络,我们希望输出多个结果。这是计算机视觉中的标准架构,称为多任务损失。
但是,存在一个巨大的问题。我们可以在图像中有多个对象,现在事情变得越来越复杂🙁,因此,我们不能利用这种多任务丢失的想法。
2.2 检测多个对象

在上图中,我们可以看到一个检测大量“鸭子”(或图像中的其他鸟类)的示例。
三、R-CNN
解决方案是使用不同大小和纵横比的滑动窗口。
请看下图:
3.1 滑动窗口

然后,一旦我们选择了滑动窗口,我们将其视为一个简单的分类任务。换句话说,由于我们可以在同一图像中有多个不同类别的数量,因此我们删除了一个多任务学习损失函数并删除了回归部分。现在,我们将问题归结为:
- 查找滑动窗口
- 执行分类
现在存在的主要问题是我们如何用不同大小的滑动窗口覆盖整个图像,并为每个滑动窗口运行CNN检测器。嗯,这可能是相当多的窗口,我们需要制定战略以找到最佳解决方案。
幸运的是,这种“滑动窗口方法”在计算机视觉中并不是一个新问题。我们已经在 Viola 和 Jones 于 2001 年开发的人脸检测算法中看到了这一点。
区域建议:
- 找到一小组可能覆盖所有对象的框。
- 通常基于启发式方法:例如,查找“类似斑点”的图像区域
- 运行相对较慢;例如,选择性搜索在 CPU 上几秒钟内提供 2000 个区域建议

其他研究人员也广泛探讨了这个问题,主要思想是专注于为我们的图像寻找“有希望的潜在窗口”。例如,我们可以在图像中搜索类似斑点的图案,并找到一小组将覆盖整个图像的窗口,仅举几例。此外,最终开发了“区域建议”算法,该方法可以检测一张图像的2,000个子区域,它们很有可能与我们搜索要检测的对象重叠。

最后,我们得出了R-CNN算法的定义。在这里,R 代表一个区域。
该算法可查找 2,000 个感兴趣区域 (RoI)。接下来,将每个 RoI 的输入图像扭曲为大小:\(224\times224 \)。作为最后一步,使用经过训练的CNN来检查扭曲图像区域中是否存在感兴趣的对象。
此外,网络的一部分可以细化投资回报率。在这里,RoI略有调整,因此它给了我们一个4个数字的序列:\(t_{x} \),\(t_{y} \),\(t_{w} \),\(t_{h} \)。下面的公式显示了我们如何获得最终的输出边界框。

如果这是您第一个与对象检测相关的算法,您可能想知道我们如何衡量准确性。对于分类来说,这相当容易,但是我们该怎么做才能进行对象检测呢?
为此,我们使用一个名为 Intersection over Union – IoU 的概念。
3.2 联合上的交叉点
我们如何判断我们的对象检测算法是否运行良好?
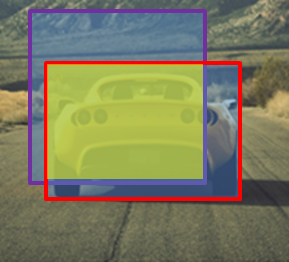
假设红色边界框是一个真实值标签。接下来,我们的检测器输出图像中存在一辆用紫色边界框标记的汽车。然后,在下图中可以轻松地将 IoU 定义为两个边界框之间的交集和并集之间的比率。
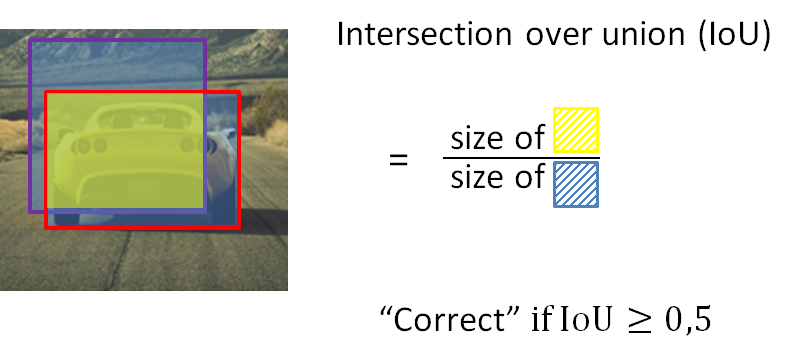
通常,大于 0.5 的值被视为良好的检测。在理想情况下,我们将完全重叠,在这种情况下,我们的 IoU 将达到最大值 1。
接下来,使用对象检测器时还有一个挑战。实质上,图像中同一对象将有大量的边界框候选项。因此,我们确实需要一种算法来解决这个问题。一种流行的算法是非最大抑制 – NMS。
3.3 非最大抑制
这个算法的想法相当简单。想象一下,我们的探测器为我们提供了下图中两辆车的以下检测。除了每个边界框之外,我们还有该检测的汽车类的概率分数。

好吧,NMS的目标是首先保留具有最高类概率的对象。例如,这些将是两个具有概率的矩形:左车为 0.8,右车为 0.9。当我们保留那些概率最大的边界框时,我们将搜索与这些边界框具有相同类和高 IoU 的边界框。在我们的例子中,我们将首先选择正确的汽车 p=0.9 并删除两个重叠的红色矩形(在右侧的汽车上)。同样,我们将对左侧的汽车重复相同的过程,从而留下白色矩形 p = 0.8 。
3.4 平均平均精度 – mAP。
最后,在使用 IoU 和 NMS 处理我们的检测后,我们需要计算目标检测器的精度。这是通过称为:平均平均精度 – mAP 的指标完成的。
计算mAP的步骤可以总结如下:我们有“狗对象”的检测。假设我们总共检测到 5 只狗。但是,我们只有 3 个地面实况检测。我们将从最高类概率 (p=0.99) 开始,并使用地面实况检测计算 IoU。如果我们的值高于 0.5,我们将将其计为真实检测。在这种情况下,我们计算精度并迭代召回。这可以在下面的召回/精度图中轻松可视化。
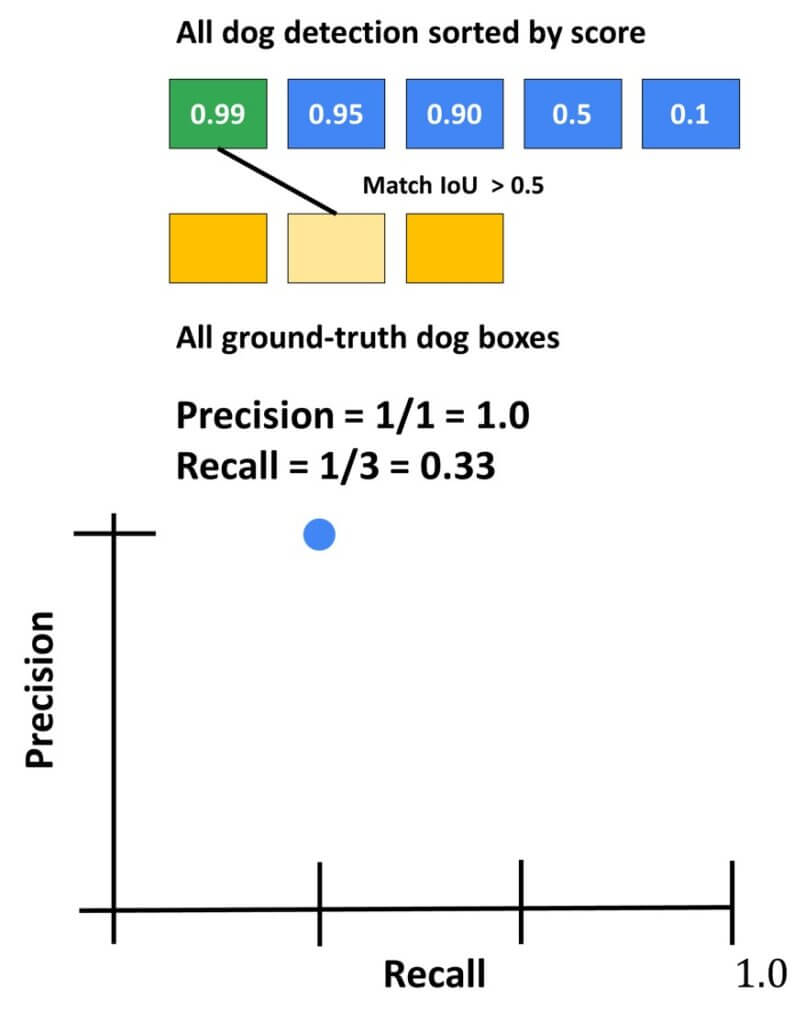
然后,我们对第二次检测进行相同的计算。例如,它将与第三个地面实况检测相匹配。现在,我们将再次更新召回率和精度并相应地绘制它们。

接下来,我们可以想象接下来的两次检测实际上是误报,而最后的第五次检测是真阳性。然后,召回率和精确度的演变如下:

最后,我们输出狗探测器的最终值。它将表示曲线下方的面积。

然后,对于一个对象检测器,假设我们正在检测三个类。我们将计算所有三个类的 AP,并取所有三个类的平均值。最后,我们将获得 meanAP 或 mAP。
四、快速 R-CNN
R-CNN算法在发明时是一个了不起的对象检测器。然而,研究人员很快意识到这种算法的主要缺点。它非常非常慢。所以,今天,有时人们甚至把它称为慢速的R-CNN。
改进来自一个相当简单的想法。交换了1)扭曲和2)在扭曲图像上运行CNN的过程。然后,主干CNN的运行只完成一次,这将大大加快速度。

我们将解释术语“骨干”。这通常是一个预先训练好的AlexNet或类似VGG的网络。它将代表处理我们的对象检测器的基础,这节省了大量工作。接下来,处理后的输出将表示特征图。请注意,主干由卷积层组成,包括最大池化和批量归一化,但不是全连接层。然后,这些特征图将被调整以适应投资回报率,为此,特征图将被裁剪/调整大小和扭曲。接下来,我们将使用较轻的“每区域网络”来处理这些扭曲特征子集中的每一个。这种较轻的网络在计算上要求要低得多。例如,该网络可能仅由来自AlexNet的最后2个完全连接的层组成。
有一个问题可能仍然让我们感到困惑。我们如何实际裁剪特征?
假设我们有以下处理管道:
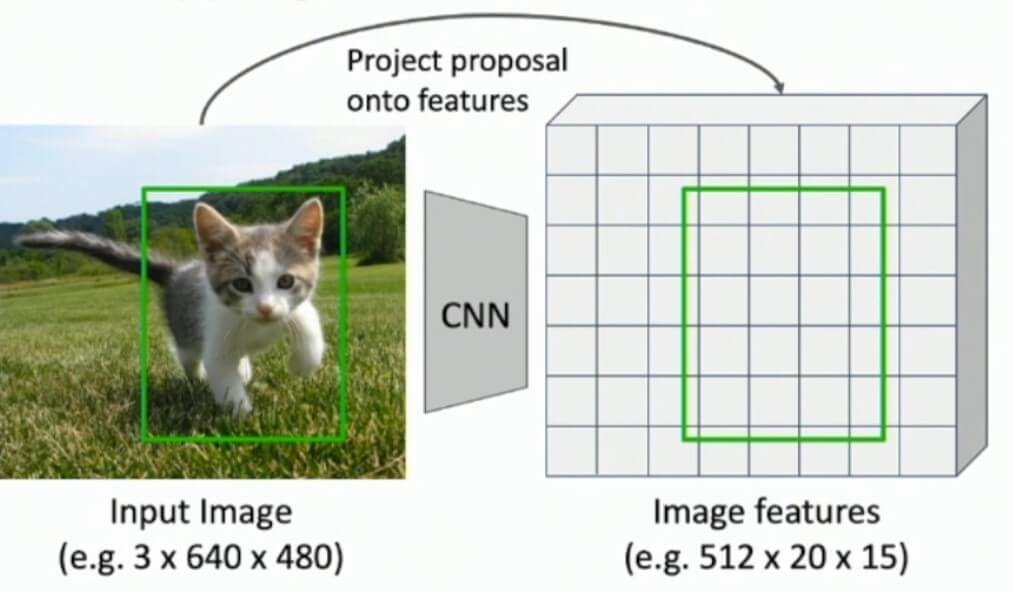
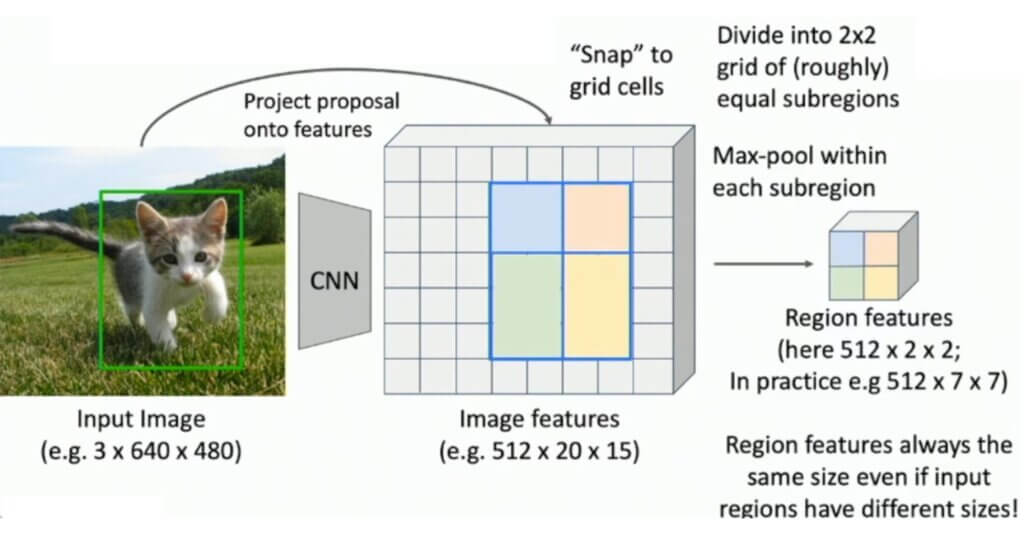
使用指定的 RoI(猫上方的绿色矩形),我们将“捕捉”到图像特征图并像往常一样继续计算。在这里,我们无需过多赘述,我们将在下图中演示此过程。简而言之,该算法将找到原始RoI和特征图元素之间的最佳匹配。必要时,将调整尺寸,以便在某些情况下,我们甚至可以具有\(3\times2\)池化区域,如下图所示。
这概述了Fast R-CNN的主要思想。收益是什么?
请看下图:
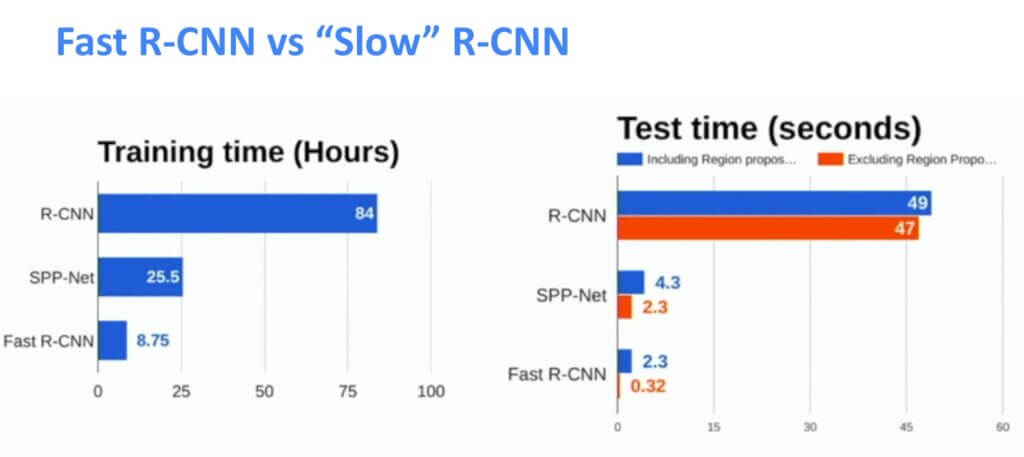
我们可以看到我们需要花在训练和测试时间上的结果。这是速度的显着提高!
五、 更快的 R-CNN
我们已经到达了该系列中的第三个算法,更快的R-CNN。同样,创建更快的 R-CNN 算法的目标可以在下面看到:
- 删除选择性 RoI 提案算法
- 创建一个层/网络,该层/网络将根据我们正在处理的图像为我们选择 RoI
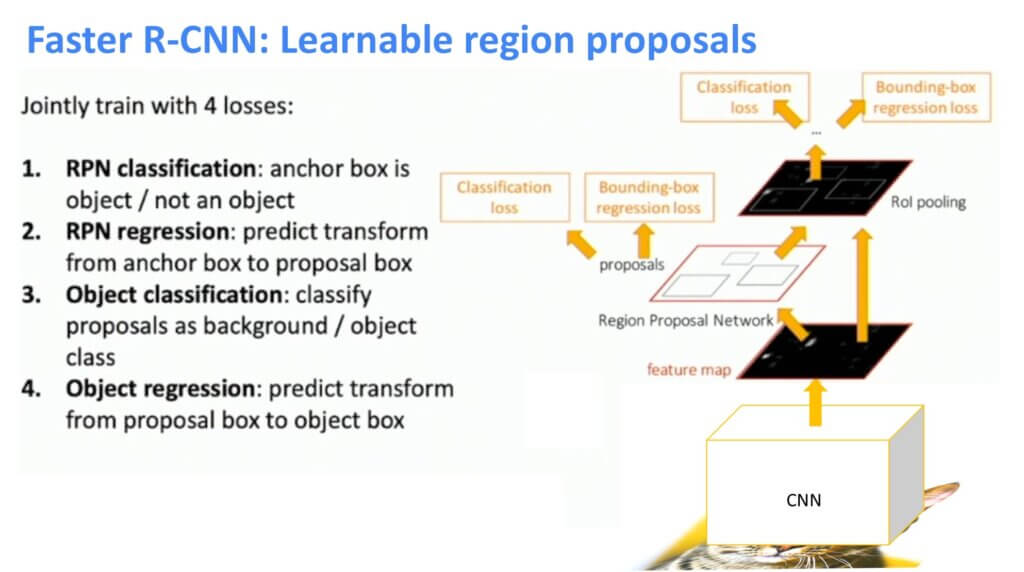
该网络称为区域提案网络 (RPN)。目标是生成特征图激活。然后,我们将这些功能提供给 RPN,它将输出区域。接下来,我们在快速R-CNN中执行所有操作。
区域提案网络 (RPN)
我们将使用原始输入图像,并将其通过主干CNN传递。这将产生所需的特征图。我们将介绍所谓的锚盒。此锚框将涵盖特征图的每个元素。下图说明了锚框的一些示例。接下来,我们将有一个网络,它将使用简单的二元分类告诉我们锚点是否包含对象。在图像中,绿色锚点被分类为具有对象的区域,而红色锚点框将在进一步分析中被丢弃。

此外,这些锚框可能不完全适合我们感兴趣的对象。因此,引入了另一个步骤来优化此锚框。此细化过程可以添加到输出细化锚框的四个坐标的 PRN 网络中。最后,这个新的边界框将称为提案框。
因此,下图显示了整体算法:
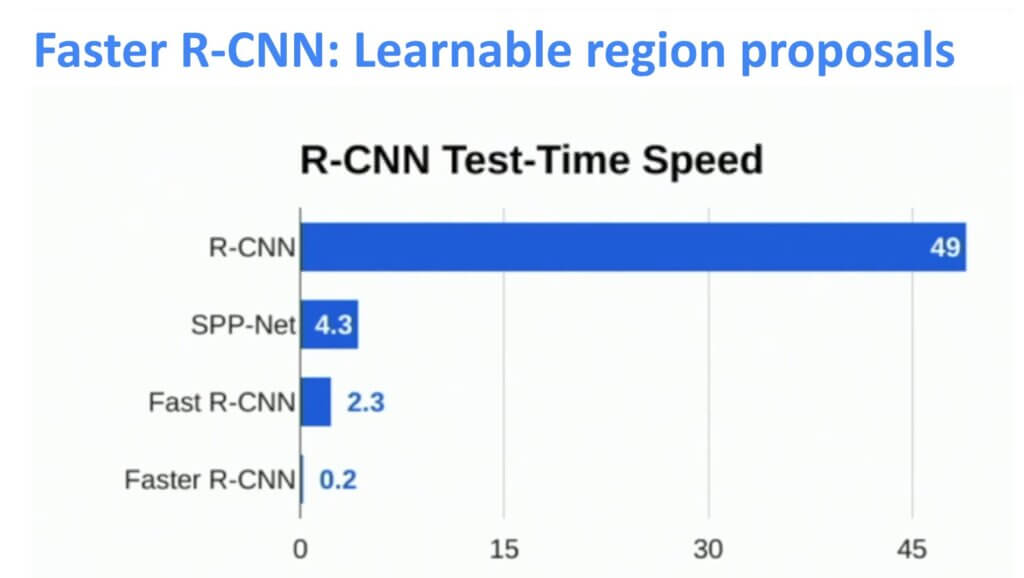
最后,我们设计了一个与原始R-CNN相比非常快的网络。因此,开发所有步骤的努力确实🙂得到了回报 下图表示处理单个图像帧所需的时间。
六、PyTorch 中更快的 R-CNN
在这一部分中,我们将演示如何在 PyTorch 中使用和应用 R-CNN 网络。从头开始实现技术性太强,而且充满了细节,所以我们只采用 PyTorch 的内置方法和模型。
import torch
import numpy as np
import matplotlib.pyplot as pltimport torchvision.transforms.functional as F在此步骤中,我们仅使用Torchvision的工具查看图像和创建边界框。
plt.rcParams["savefig.bbox"] = 'tight'def show(imgs):if not isinstance(imgs, list):imgs = [imgs]fig, axs = plt.subplots(ncols=len(imgs), squeeze=False)for i, img in enumerate(imgs):img = img.detach()img = F.to_pil_image(img)axs[0, i].imshow(np.asarray(img))axs[0, i].set(xticklabels=[], yticklabels=[], xticks=[], yticks=[])我们将使用!wget命令从互联网下载两个图像,并使用make_grid()方法创建照片网格。必须为此函数提供 dtype uint8 的图像。
!wget https://i.pinimg.com/736x/99/a6/fd/99a6fdcf4d023196d77eb36aa6082737--styles-php.jpg -O /content/car1.jpg
!wget https://i.pinimg.com/736x/dd/68/20/dd68208d216bb677bdab86579a856197--offroad-all-white.jpg -O /content/car2.jpgfrom torchvision.utils import make_grid
from torchvision.io import read_image
from pathlib import Pathcar1_int = read_image('car1.jpg')
car2_int = read_image('car2.jpg')
car_list = [car1_int, car2_int]grid = make_grid(car_list)
show(grid)
draw_bounding_boxes() 可用于在图像上绘制框。颜色、标签、宽度、字体和字体大小都可以自定义。这些框的格式为(xmin、ymin、xmax 和 ymax)。
from torchvision.utils import draw_bounding_boxesboxes = torch.tensor([[50, 50, 100, 200], [35, 120, 620, 390]], dtype=torch.float)
colors = ["blue", "yellow"]
result = draw_bounding_boxes(car1_int, boxes, colors=colors, width=5)
show(result)
当然,我们也可以描绘用于 torchvision 检测的模型生成的边界框。以下是使用加载了 Faster R-CNN 模型的 fasterrcnn_resnet50_fpn() 模型的演示。
from torchvision.models.detection import fasterrcnn_resnet50_fpn, FasterRCNN_ResNet50_FPN_Weightsweights = FasterRCNN_ResNet50_FPN_Weights.DEFAULT
transforms = weights.transforms()images = [transforms(d) for d in car_list]model = fasterrcnn_resnet50_fpn(weights=weights, progress=False)
model = model.eval()outputs = model(images)
print(outputs)[{'boxes': tensor([[ 28.9595, 134.5368, 601.7979, 349.9137],[193.5566, 140.5615, 265.0889, 167.9842],[ 39.9696, 147.1586, 385.6311, 320.0778],[ 56.1535, 57.3264, 70.2791, 74.9138],[ 18.2229, 145.6895, 372.0598, 223.5003],[306.9967, 138.4377, 609.1713, 338.3705],[401.1234, 142.1768, 597.3285, 218.0435],[194.6392, 136.0293, 311.0567, 178.4407],[177.8387, 137.6242, 564.1535, 217.5274]], grad_fn=<StackBackward0>), 'labels': tensor([ 3, 3, 3, 10, 3, 3, 3, 3, 3]), 'scores': tensor([0.9975, 0.9756, 0.1578, 0.1235, 0.1173, 0.1015, 0.1010, 0.0596, 0.0592],grad_fn=<IndexBackward0>)}, {'boxes': tensor([[ 50.2957, 92.2544, 559.3746, 394.2029],[440.5210, 165.9631, 514.2350, 189.4745],[ 1.0823, 66.7191, 80.6373, 216.8004],[545.3552, 166.6906, 565.3425, 177.7227],[623.8428, 166.1020, 639.8632, 175.8192],[621.2831, 168.1364, 634.0815, 176.0556],[630.9683, 166.2280, 640.0000, 174.9458],[221.3280, 133.8347, 248.0095, 177.0258],[544.7429, 167.2232, 556.0880, 176.6033],[ 64.7255, 98.3926, 351.7974, 324.6750],[ 0.0000, 62.4695, 107.9940, 258.9799],[495.5164, 167.1042, 517.1301, 180.6814],[441.0862, 167.3649, 456.5072, 175.7454],[620.4214, 168.7013, 628.3602, 175.9150],[ 5.8789, 11.4534, 196.9230, 289.0226],[330.2793, 134.5042, 364.6375, 166.5594],[544.6981, 166.3828, 566.0054, 178.1335],[ 0.0000, 70.6256, 84.6627, 257.4922],[554.5934, 167.3156, 566.4719, 177.3227]], grad_fn=<StackBackward0>), 'labels': tensor([ 8, 3, 72, 3, 3, 3, 3, 1, 3, 8, 8, 3, 3, 3, 8, 1, 8, 6,3]), 'scores': tensor([0.9941, 0.9835, 0.9119, 0.9073, 0.8916, 0.5875, 0.5719, 0.2739, 0.1993,0.1637, 0.1330, 0.1272, 0.1253, 0.0706, 0.0670, 0.0657, 0.0586, 0.0559,0.0506], grad_fn=<IndexBackward0>)}] 让我们可视化模型找到的框。将仅绘制分数高于指定阈值的框。
score_threshold = 0.8
cars_with_boxes = [draw_bounding_boxes(dog_int, boxes=output['boxes'][output['scores'] > score_threshold], width=4)for dog_int, output in zip(car_list, outputs)
]
show(cars_with_boxes)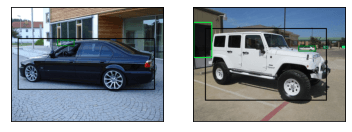
七、总结
这就是这篇文章的全部内容。我们已经看到了目标检测算法R-CNN背后的理论。我们已经看到了该算法和下一个检测算法的演变,这些算法更快,快速R-CNN和更快的R-CNN。最后,我们编写了运行我们自己的 Faster R-CNN 探测器所需的代码,并在图像上检测了汽车。
参考和引用
#027 R-CNN, Fast R-CNN, and Faster R-CNN explained with a demonstration in PyTorch - Master Data Science 16.01.2023 (datahacker.rs)
datahacker.rs 深度学习 机器学习 PyTorch 16.01.2023 | 0
相关文章:
【PyTorch2 之027】在 PyTorch 中的R-CNN、Fast R-CNN和 Faster R-CNN
一、说明 亮点:对象检测是计算机视觉中最重要的任务之一。在这篇文章中,我们将概述最有影响力的对象检测算法家族之一:R-CNN、Fast R-CNN 和 Faster R-CNN。我们将重点介绍它们中的每一个的主要新颖性和改进。 最后,我们将专注于 …...

C++学习——C++函数的编译、成员函数的调用、this指针详解
以下内容源于C语言中文网的学习与整理,非原创,如有侵权请告知删除。 从博文的分析中可以看出,对象的内存中只保留了成员变量,除此之外没有任何其他信息,程序运行时不知道 stu 的类型为 Student,也不知道它…...

Pulsar Manager和dashboard部署和启用认证
Pulsar Manager部署和启用认证 官方地址: https://pulsar.apache.org/docs/zh-CN/next/administration-pulsar-manager/ Pulsar Manager 是一个网页式可视化管理与监测工具,支持多环境下的动态配置。可用于管理和监测租户、命名空间、topic、订阅、broker、集群等…...
K8S环境搭建
K8S环境搭建 前置条件 部署3台VM,一台作为master,两台作为slave需要保障vm之间网络是互通的 为vm安装docker # 安装/更新 yum-utils yum install -y yum-utils#添加阿里镜像稳定版仓库 sudo yum-config-manager --add-repo http://mirrors.aliyun.com/docker-ce…...
常用的软件项目管理工具一览
软件项目管理工具是帮助团队成功管理和完成软件开发项目的软件程序和应用程序。根据项目及其规模和复杂性,可以使用各种各样的这些工具来协助完成任务,从任务跟踪和调度,到项目报告,到版本控制和协作。 项目经理对软件项目的整体成…...
关于网络协议的若干问题(五)
1、DH 算法会因为传输随机数被破解吗? 答:DH 算法的交换材料要分公钥部分和私钥部分,公钥部分和其他非对称加密一样,都是可以传输的,所以对于安全性是没有影响的,而且传输材料远比传输原始的公钥更加安全。…...
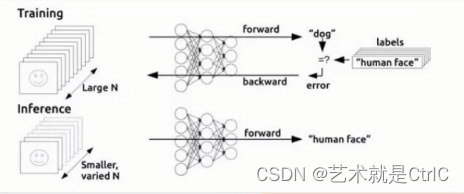
TensorFlow入门(十七、神经元的拟合原理)
深度学习的概念源于人工神经网络的研究,神经网络是由多个神经元组成,。一个神经元由以下几个关键知识点组成: ①激活函数 ②损失函数 ③梯度下降 单个神经元的网络模型如图所示 用计算公式表达如下: z为输出的结果,x为输入,w为权重,b为偏置值。z…...

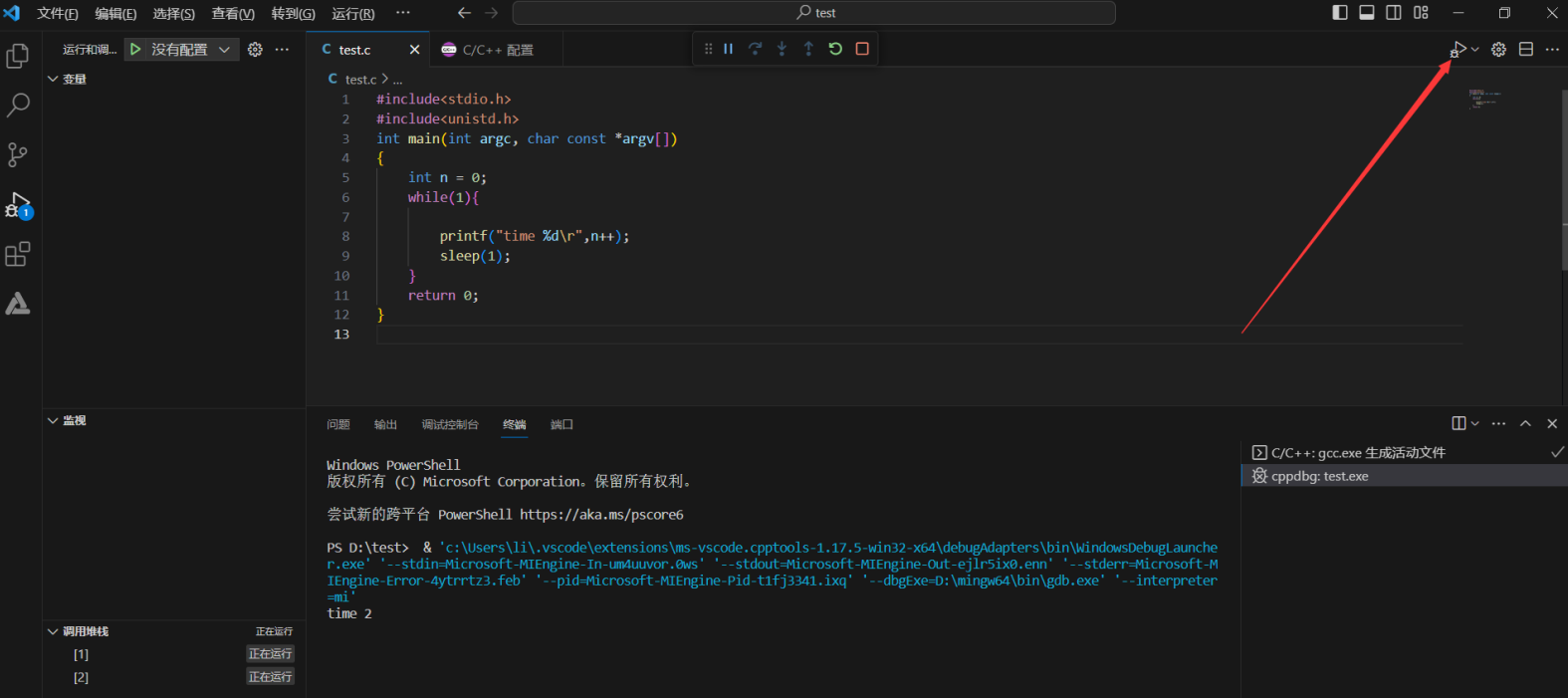
VSCODE配置C和C++
VSCode 运行 C/C 怎么配置? - 忆梦怀思的回答 - 知乎 https://www.zhihu.com/question/577315418/answer/3232537840 这个很好用,简单明白。 其中最后我的只配置了tasks.json就成功了。...

位于同一子网下的ip在子网掩码配置错误的情况下如何进行通信(wireshrak抓包分析)
前言 最近看书发现个问题,正好想学习下wireshark的使用,于是抓包做了下实验。 问题是这样的,假设有服务器A和服务器B,正确配置下两者处于同一子网;此时B的网络配置正确,而A在配置子网掩码时出了错ÿ…...

Dockerfile镜像实战
目录 1、构建SSH镜像 2、Systemctl镜像 3、nginx镜像 4、tomcat 镜像 5、mysql镜像 1、构建SSH镜像 cd /opt/sshd vim Dockerfile #第一行必须指明基于的基础镜像 FROM centos:7 #作者信息 MAINTAINER this is ssh image <hmj> #镜像的操作指令 RUN yum -y update R…...

企业如何选择安全又稳定的文件传输协议
企业无论是内部的数据共享,还是与外部的合作交流,都需要通过网络进行文件的传输和交换。然而,文件传输它涉及到多方面的因素,例如文件的大小、数量、类型、敏感性、传输距离、网络环境等。这些因素都会影响到文件传输的各个方面&a…...
Linux Kernel 4.13 RC6发布:正式版9月3日发布
美国当地时间上周末,大神Linus Torvalds发布了Linux Kernel 4.13内核的又一候选版本。上周发布的RC5版本更新幅度也要比上上周的RC4要小,Linus Torvalds表示本周发布的RC6版本属于常规更新,在过去一周的开发过程中并没有出现任何意外。RC6版本…...

C++学习——C++中const的新花样
以下内容源于C语言中文网的学习与整理,非原创,如有侵权请告知删除。 关于C语言中const的用法,见《C语言const的用法详解》。 一、C中const的新花样 在C语言中,const用来限制一个变量,表示这个变量不能被修改…...
编译源码安装Subversion)
【Linux环境搭建】五、Linux(CentOS7)编译源码安装Subversion
Subversion(简称为SVN)是一种版本控制系统,能够管理和跟踪项目开发中的代码变化。Subversion最初由CollabNet公司开发,现已成为Apache软件基金会的顶级项目之一。 Subversion使用一个中央仓库来存储所有项目文件和历史记录。开发人…...
微信小程序入门讲解【超详细】
一. 微信小程序简介 1.1 什么是小程序 2017年度百度百科十大热词之一 微信小程序(wei xin xiao cheng xu),简称小程序,英文名Mini Program,是一种不需要下载安装即可使用的应用( 张小龙对其的定义是无需安装…...

AtCoder ABC239G 最小割集
题意 传送门 AtCoder ABC239G Builder Takahashi 题解 将原图中每个节点拆为入点 v v v 与出点 v ′ v v′,对于原图任一边 ( u , v ) (u,v) (u,v) 则 u ′ → v , v → u u\rightarrow v, v\rightarrow u u′→v,v→u 连一条容量为 ∞ \infty ∞ 的边&…...

Simple RPC - 01 框架原理及总体架构初探
文章目录 概述RPC 框架是怎么调用远程服务的?客户端侧的逻辑服务端侧的逻辑完整流程 客户端是如何找到服务端地址的呢?核心:NamingService跨语言的RPC实现原理 RPC 框架的总体结构对外接口服务注册中心如何使用业务服务接口客户端服务端 模块…...
VScode运行C/C++
VScode运行C/C VScode的安装这里不讲 一、mingw64的下载 二、VS code打开文件夹与创建C文件 ----------------这一步给萌新看,有C和VScode的基础可跳过---------------- 1.创建一个文件夹 2.vscode打开刚刚创建的文件夹 3.新建文件,在输入文件名1.c后…...
串口初始化)
#智能车项目(三)串口初始化
串口1初始化 初始化串口1PA9 PA10 流程 1、声明结构体 GPIO_InitTypeDef GPIO_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; USART_InitTypeDef USART_InitStructure; 2、打开时钟 // 打开串口GPIO的时钟 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA , ENABLE); /…...

网络通信错误代码列表 HTTP 、FTP
HTTP 1xx(临时响应):表示临时响应并需要请求者继续执行操作的状态代码。 100 (继续) 请求者应当继续提出请求。服务器返回此代码表示已收到请求的第一部分,正在等待其余部分。 101 (切换协议…...

STM32F4基本定时器使用和原理详解
STM32F4基本定时器使用和原理详解 前言如何确定定时器挂载在哪条时钟线上配置及使用方法参数配置PrescalerCounter ModeCounter Periodauto-reload preloadTrigger Event Selection 中断配置生成的代码及使用方法初始化代码基本定时器触发DCA或者ADC的代码讲解中断代码定时启动…...
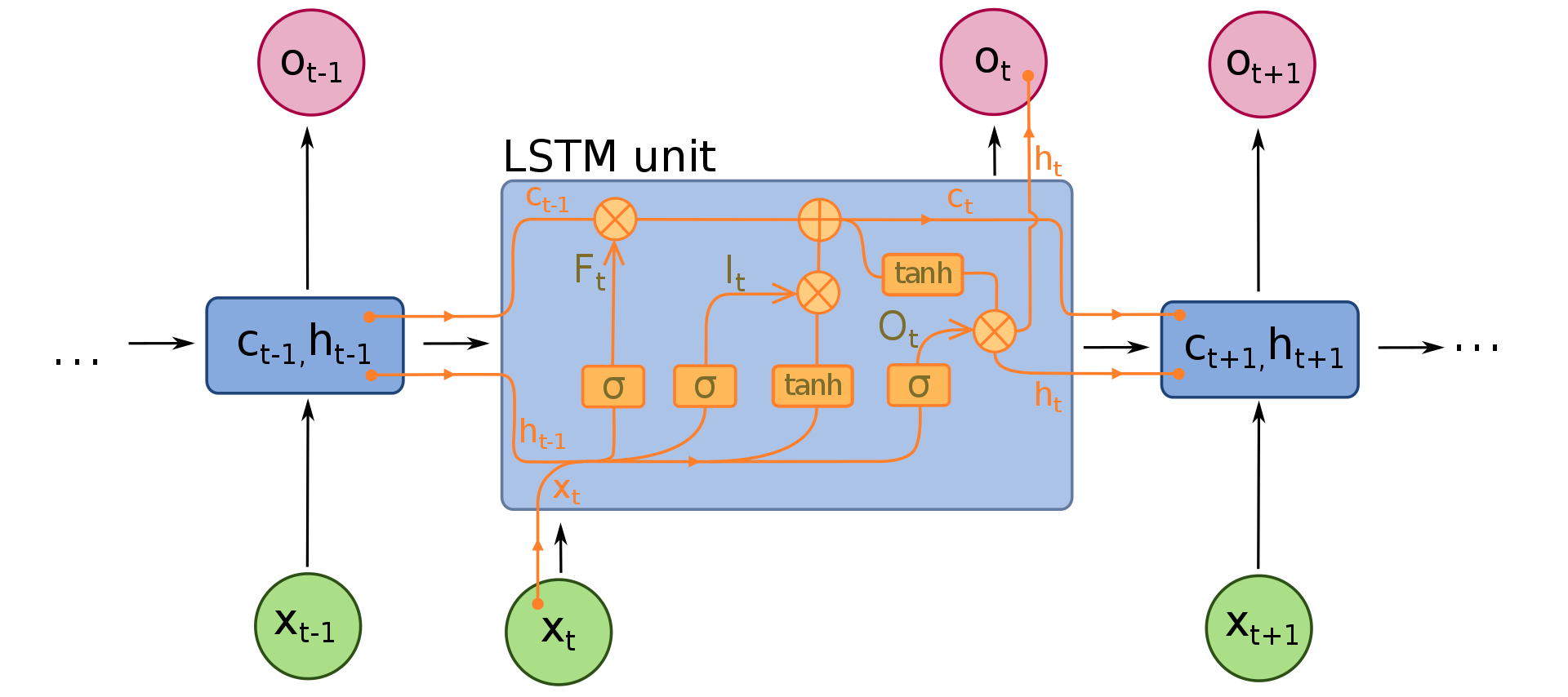
NLP学习路线图(二十三):长短期记忆网络(LSTM)
在自然语言处理(NLP)领域,我们时刻面临着处理序列数据的核心挑战。无论是理解句子的结构、分析文本的情感,还是实现语言的翻译,都需要模型能够捕捉词语之间依时序产生的复杂依赖关系。传统的神经网络结构在处理这种序列依赖时显得力不从心,而循环神经网络(RNN) 曾被视为…...

Mac下Android Studio扫描根目录卡死问题记录
环境信息 操作系统: macOS 15.5 (Apple M2芯片)Android Studio版本: Meerkat Feature Drop | 2024.3.2 Patch 1 (Build #AI-243.26053.27.2432.13536105, 2025年5月22日构建) 问题现象 在项目开发过程中,提示一个依赖外部头文件的cpp源文件需要同步,点…...
Springboot社区养老保险系统小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,社区养老保险系统小程序被用户普遍使用,为方…...

【Java学习笔记】BigInteger 和 BigDecimal 类
BigInteger 和 BigDecimal 类 二者共有的常见方法 方法功能add加subtract减multiply乘divide除 注意点:传参类型必须是类对象 一、BigInteger 1. 作用:适合保存比较大的整型数 2. 使用说明 创建BigInteger对象 传入字符串 3. 代码示例 import j…...

Fabric V2.5 通用溯源系统——增加图片上传与下载功能
fabric-trace项目在发布一年后,部署量已突破1000次,为支持更多场景,现新增支持图片信息上链,本文对图片上传、下载功能代码进行梳理,包含智能合约、后端、前端部分。 一、智能合约修改 为了增加图片信息上链溯源,需要对底层数据结构进行修改,在此对智能合约中的农产品数…...

探索Selenium:自动化测试的神奇钥匙
目录 一、Selenium 是什么1.1 定义与概念1.2 发展历程1.3 功能概述 二、Selenium 工作原理剖析2.1 架构组成2.2 工作流程2.3 通信机制 三、Selenium 的优势3.1 跨浏览器与平台支持3.2 丰富的语言支持3.3 强大的社区支持 四、Selenium 的应用场景4.1 Web 应用自动化测试4.2 数据…...
)
华为OD最新机试真题-数组组成的最小数字-OD统一考试(B卷)
题目描述 给定一个整型数组,请从该数组中选择3个元素 组成最小数字并输出 (如果数组长度小于3,则选择数组中所有元素来组成最小数字)。 输入描述 行用半角逗号分割的字符串记录的整型数组,0<数组长度<= 100,0<整数的取值范围<= 10000。 输出描述 由3个元素组成…...

高防服务器价格高原因分析
高防服务器的价格较高,主要是由于其特殊的防御机制、硬件配置、运营维护等多方面的综合成本。以下从技术、资源和服务三个维度详细解析高防服务器昂贵的原因: 一、硬件与技术投入 大带宽需求 DDoS攻击通过占用大量带宽资源瘫痪目标服务器,因此…...
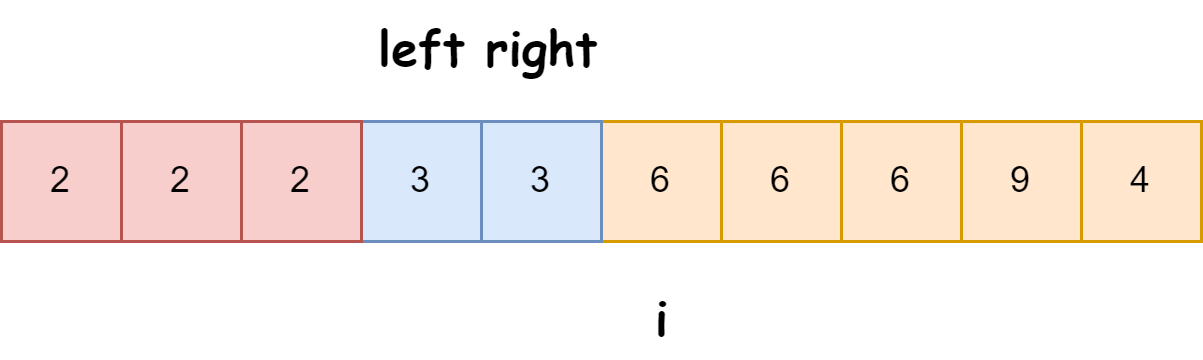
快速排序算法改进:随机快排-荷兰国旗划分详解
随机快速排序-荷兰国旗划分算法详解 一、基础知识回顾1.1 快速排序简介1.2 荷兰国旗问题 二、随机快排 - 荷兰国旗划分原理2.1 随机化枢轴选择2.2 荷兰国旗划分过程2.3 结合随机快排与荷兰国旗划分 三、代码实现3.1 Python实现3.2 Java实现3.3 C实现 四、性能分析4.1 时间复杂度…...