论文阅读:Segment Any Point Cloud Sequences by Distilling Vision Foundation Models
目录
概要
Motivation
整体架构流程
技术细节
小结
论文地址:[2306.09347] Segment Any Point Cloud Sequences by Distilling Vision Foundation Models (arxiv.org)
代码地址:GitHub - youquanl/Segment-Any-Point-Cloud: [NeurIPS'23 Spotlight] Segment Any Point Cloud Sequences by Distilling Vision Foundation Models
概要
视觉基础模型 (VFMs) 的最新进展为通用且高效的视觉感知开辟了新的可能性。在这项工作中,论文中介绍了 一个新颖的框架Seal,利用 VFM 来分割不同的汽车点云序列。Seal 表现出三个吸引人的特性:
- 可扩展性:VFMs 直接提炼成点云,消除了在预训练期间 2D 或 3D 中的注释需求;
- 一致性:空间和时间关系在相机到激光雷达和点到段阶段都强制执行,促进了跨模态表示学习;
- 通用性:Seal 能够将知识转移以现成的方式转移到涉及不同点云的下游任务,包括来自真实/合成、低/高分辨率、大/小规模和干净/损坏的数据集的任务。
在实现以下目标的同时,能够学习有用的特征:
- 利用原始点云作为输入,从而消除对半或弱标签的需要,并降低标注成本。
- 利用驾驶场景中固有的空间和时间线索来增强表示学习。
- 确保可推广到不同的下游点云,超出预训练阶段使用的点云。
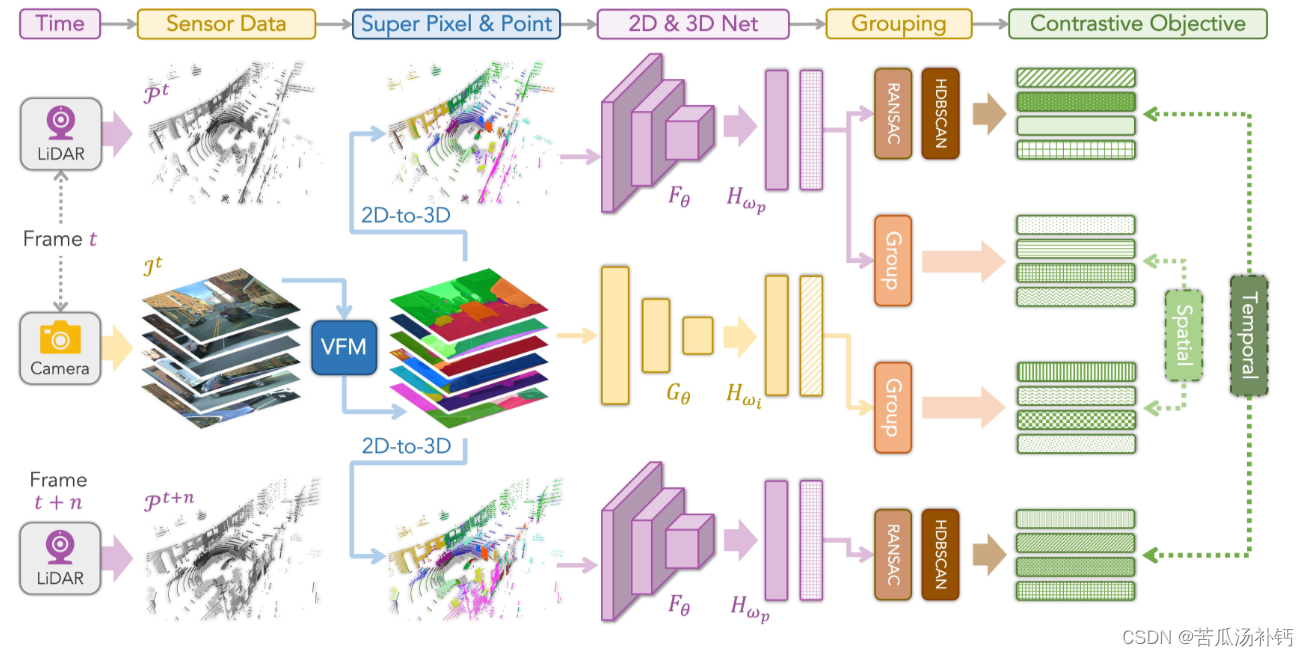
从跨模态表征学习的最新进展中获得灵感,并以VFMs的成功为基础,从VFMs中提取语义丰富的知识,以支持具有挑战性的汽车点云上的自监督表示学习。该论文的核心思想是利用LiDAR和相机传感器之间的2D-3D对应,构建高质量的对比样本进行跨模态表征学习。
Motivation
- 现有的点云分割模型严重依赖于用于训练的大型带注释的数据集,即点云标记的劳动密集型性质;
- 不同传感器之间存在显著的配置差异(如波束数、摄像机角度、发射速率),这种局限性不可避免地阻碍了点云分割的可扩展性;
- LiDAR与摄像机之间往往很难实现完美的校准。
整体架构流程
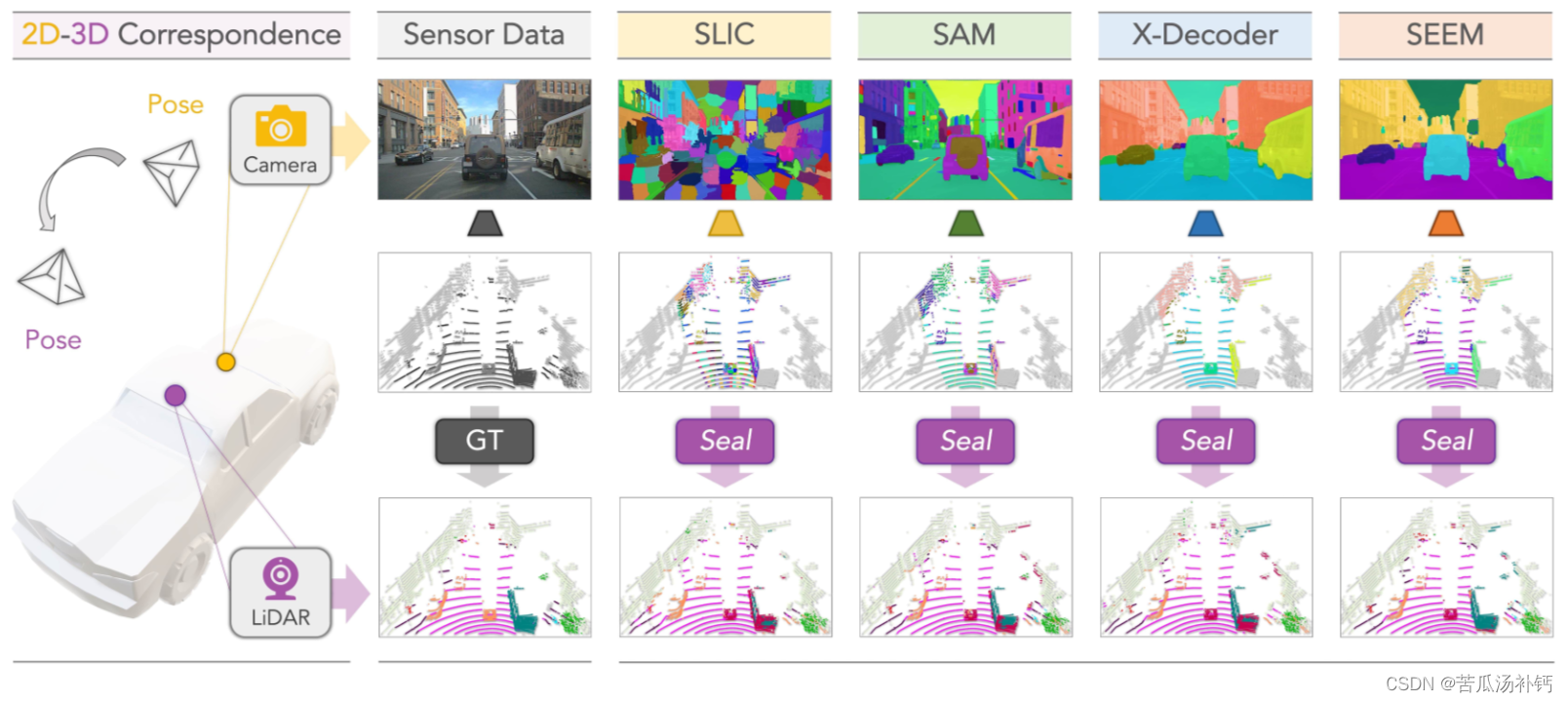
Seal通过超像素驱动的对比学习,从VFMs到点云在摄像机视图上蒸馏语义感知。[第1行]由SLIC和VFMs生成的语义超像素(Semantic superpixels),其中每个颜色代表一个“语义块”(segment)。[第2行]语义超点(Semantic superpoints)通过camera-LiDAR对应将超像素投影到3D进行聚合。[第3行]由SLIC和不同的VFMs驱动的框架的 linear probing 结果的可视化。
技术细节
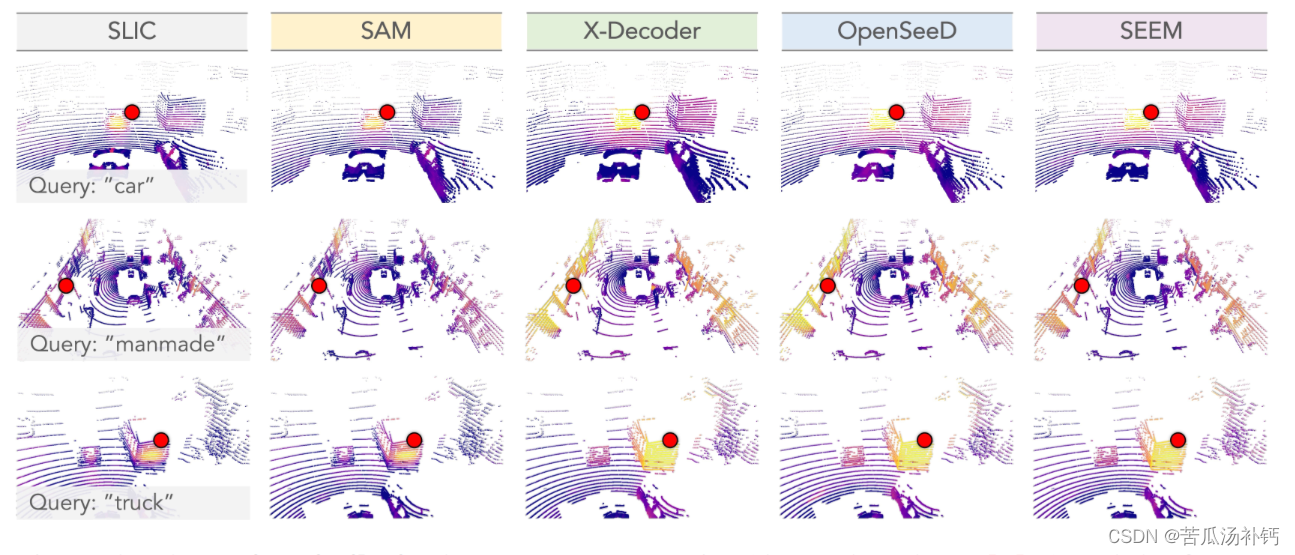
语义超点时间一致性依赖于来自点云的精确几何信息,并利用实例跨不同时间戳的不同视图来学习时间一致的表示。考虑到最坏的情况,LiDAR和相机传感器之间的2D-3D对应变得不可靠,这种几何约束仍然可以有效地缓解在不准确的交叉传感器校准和同步中出现的潜在误差。此外,本文的point-to-segment正则化机制可以对空间信息进行聚合,从而在lidar获取的场景中起到更好的区分实例的作用,例如“car”和“truck”。正如本文将在下面的章节中展示的,本文的实验结果能够验证提出的一致性正则化目标的有效性和优越性。
使用MinkUNet作为3D骨干,以0.10m大小的圆柱体素(cylindrical voxels)作为输入。2D骨干是用MoCoV2预训练的ResNet-50。使用带动量的SGD和余弦退火scheduler,在32 batch size的两个GPUs上对分割网络进行50个epochs的预训练。为了进行微调,在nuScenes和SemanticKITTI上采用了与SLidR完全相同的数据分割、扩展和验证协议,并在其他数据集上采用了类似的过程。训练目标是最小化交叉熵损失和Lovasz-Softmax损失的组合。
小结
本文提出了Seal,是利用二维视觉基础模型在大规模3D点云上进行自监督表示学习的首次尝试。这是一个可伸缩的、一致的、可泛化的框架,旨在捕获语义感知的空间和时间一致性,从而能够从汽车点云序列中提取信息特征。
在11个不同的点云数据集上进行的大量实验证明了Seal的有效性和优越性。Seal在线性探测后在nuScenes上实现了显著的45.0% mIoU,超过了随机初始化36.9% mIoU,比现有技术高出6.1% mIoU。此外,Seal 在所有 11 个测试点云数据集上的 20 个不同的小样本微调任务中显示出比现有方法显着的性能提升。跨11个不同数据配置的点云数据集对下游任务的linear probing和微调方面明显优于以前的最先进的(SoTA)方法。
相关文章:
论文阅读:Segment Any Point Cloud Sequences by Distilling Vision Foundation Models
目录 概要 Motivation 整体架构流程 技术细节 小结 论文地址:[2306.09347] Segment Any Point Cloud Sequences by Distilling Vision Foundation Models (arxiv.org) 代码地址:GitHub - youquanl/Segment-Any-Point-Cloud: [NeurIPS23 Spotlight]…...
Netty 入门 — 亘古不变的Hello World
这篇文章我们正式开始学习 Netty,在入门之前我们还是需要了解什么是 Netty。 什么是 Netty 为什么很多人都推崇 Java boy 去研究 Netty?Netty 这么高大上,它到底是何方神圣? 用官方的话说:Netty 是一款异步的、基于事…...

idea插件开发javax.net.ssl.SSLException: No PSK available. Unable to resume.
idea插件开发,编译出错 javax.net.ssl.SSLException: No PSK available. Unable to resume.at java.base/sun.security.ssl.Alert.createSSLException(Alert.java:129)at java.base/sun.security.ssl.Alert.createSSLException(Alert.java:117)at java.base/sun.security.ssl.…...

Selenium的WebDriver操作页面的超时或者元素重叠引起的ElementClickInterceptedException
超时 处理由页面加载引起的超时是在使用 Selenium 进行自动化测试中常见的任务。页面加载可能因网络速度慢、页面复杂性或异步操作而导致超时。以下是一些处理页面加载超时的方法: 1.设置隐式等待时间: 使用 implicitly_wait 方法可以设置隐式等待时间…...

oracle数据库的缓存设置
Oracle缓存由两个参数控制SGA_TARGET和PGA_AGGREGATE_TARGET,设置了这两个参数,其他的基本内存部分都由Oracle自动配置为最优值,这也是Oracle推荐的方式。 SGA_TARGET 和PGA_AGGREGATE_TARGET是动态参数,可以在不重启数据库的情况…...
算法通关村第一关-链表青铜挑战笔记
欢迎来到 : 第一关青铜关 java如何创建链表链表怎么增删改查 我们先了解链表 单链表的概念 我们从简单的创建和增删改查开始. 链表的概念 线性表分为顺序表(数组组成)和链表(节点组成) . 链表又分: 单向 双向有哨兵节点 无哨兵节点循环 不循环 链表是一种物理存储单…...
✔ ★【备战实习(面经+项目+算法)】 10.15学习时间表
✔ ★【备战实习(面经项目算法)】 坚持完成每天必做如何找到好工作1. 科学的学习方法(专注!效率!记忆!心流!)2. 每天认真完成必做项,踏实学习技术 认真完成每天必做&…...

pytorch 训练时raise EOFError EOFError
训练到一半时获取验证数据报错 报错代码 imgs next(iter(val_dataloader)) val_dataloader DataLoader(ImageDataset("data/%s" % opt.dataset_name, transforms_transforms_, unalignedTrue, mode"test"),batch_size5,shuffleTrue,num_workers2,)def …...
node.js+NPM包管理器+Webpack打包工具+前端项目搭建
javascript运行环境(无需依赖html文件) BFF,服务于前端的后端 官网下载安装,node -v查看是否安装成功 ①、创建一个01.js文件 //引入http模块 const httprequire(http)//创建服务器 http.createServer(function(request,respo…...
)
PCL点云处理之基于FPFH特征的全局配准流程具体实现(二百二十一)
PCL点云处理之基于FPFH特征的全局配准流程具体实现(二百二十一) 一、算法介绍二、算法实现1.代码2.效果一、算法介绍 PCL点云库提供的多种工具,可以组合为一套完整的点云配准流程,这里选择FPFH特征,进行具体的配准流程实现,主要内容包括点云读取、点云法线计算、点云特征…...
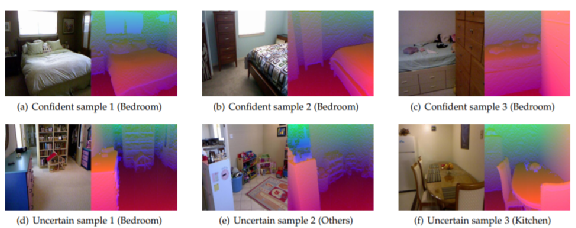
ai_drive67_基于不确定性的多视图决策融合
论文链接:https://openreview.net/forum?idOOsR8BzCnl5 https://arxiv.org/abs/2102.02051 代码链接:https://github.com/hanmenghan/TMC Zongbo Han, Changqing Zhang, Huazhu Fu, Joey Tianyi Zhou, Trusted Multi-View Classification, Internatio…...
Docker逃逸---procfs文件挂载
一、产生原因 将宿主机/proc目录挂载进了容器,而该目录内的/proc/sys/kernel/core_pattern文件是负责进程奔溃时内存数据转储的,当第一个字符是| 管道符时,后面的部分会以命令行的方式进行解析并运行,攻击者可以将恶意文件写入该…...

[Python小项目] 从桌面壁纸到AI绘画
从桌面壁纸到AI绘画 一、前言 1.1 确认问题 由于生活和工作需要,小编要长时间的使用电脑,小编又懒,一个主题用半年的那种,所以桌面壁纸也是处于常年不更换的状态。即时改变主题也是在微软自带的壁纸中选择,而这些自…...

【Docker 内核详解】namespace 资源隔离(五):User namespaces
【Docker 内核详解 - namespace 资源隔离】系列包含: namespace 资源隔离(一):进行 namespace API 操作的 4 种方式namespace 资源隔离(二):UTS namespace & IPC namespacenamespace 资源隔…...

网络原理必知会
衔接上文:网络原理必知会_念君思宁的博客-CSDN博客 流量控制: 流量控制也是保证可靠性的机制 对于滑动窗口,批量发送数据而言,窗口越大,相当于批量发送的数据越多,整体的速度也就越快了,但是&…...
ELK 日志分析系统介绍与部署
目录 一、ELK 简介: 1.开源工具介绍: 2.其它组件: 2.1 Filebeat: 2.2 Fluentd: 2.3 缓存/消息队列(redis、kafka、RabbitMQ等): 3. filebeat 结合 logstash 带来好处: 二、为什么要…...

Android 内存治理之线程
1、 前言 当我们在应用程序中启动一个线程的时候,也是有可能发生OOM错误的。当我们看到以下log的时候,就说明系统分配线程栈失败了。 java.lang.OutOfMemoryError: pthread_create (1040KB stack) failed: Out of memory这种情况可能是两种原因导致的。…...

三、K8S之ReplicaSet
ReplicaSet 一、概述 Kubernetes最核心的功能是编排,编排操作都是依靠控制器对象来完成,高级控制器控制着基础的控制器,基础控制器再去控制Pod,Pod里面再包容器。K8S项目里API对象层级大概就是这样。 而ReplicaSet这个控制器是…...
【基础篇】四、本地部署Flink
文章目录 1、本地独立部署会话模式的Flink2、本地独立部署会话模式的Flink集群3、向Flink集群提交作业4、Standalone方式部署单作业模式5、Standalone方式部署应用模式的Flink Flink的常见三种部署方式: 独立部署(Standalone部署)基于K8S部署…...
?)
简述什么是迭代器(Iterator)?
迭代器(Iterator)是一种设计模式,Java 中的迭代器是集合框架中的一个接口,它可以让程序员遍历集合中的元素而无需暴露集合的内部结构。使用迭代器可以遍历任何类型的集合,例如 List、Set 和 Map 等。 通过调用集合类的 iterator() 方法可以获取一个迭代器,并使用 hasNext…...

R语言AI模型部署方案:精准离线运行详解
R语言AI模型部署方案:精准离线运行详解 一、项目概述 本文将构建一个完整的R语言AI部署解决方案,实现鸢尾花分类模型的训练、保存、离线部署和预测功能。核心特点: 100%离线运行能力自包含环境依赖生产级错误处理跨平台兼容性模型版本管理# 文件结构说明 Iris_AI_Deployme…...
无法与IP建立连接,未能下载VSCode服务器
如题,在远程连接服务器的时候突然遇到了这个提示。 查阅了一圈,发现是VSCode版本自动更新惹的祸!!! 在VSCode的帮助->关于这里发现前几天VSCode自动更新了,我的版本号变成了1.100.3 才导致了远程连接出…...

五年级数学知识边界总结思考-下册
目录 一、背景二、过程1.观察物体小学五年级下册“观察物体”知识点详解:由来、作用与意义**一、知识点核心内容****二、知识点的由来:从生活实践到数学抽象****三、知识的作用:解决实际问题的工具****四、学习的意义:培养核心素养…...

Spring AI 入门:Java 开发者的生成式 AI 实践之路
一、Spring AI 简介 在人工智能技术快速迭代的今天,Spring AI 作为 Spring 生态系统的新生力量,正在成为 Java 开发者拥抱生成式 AI 的最佳选择。该框架通过模块化设计实现了与主流 AI 服务(如 OpenAI、Anthropic)的无缝对接&…...

c#开发AI模型对话
AI模型 前面已经介绍了一般AI模型本地部署,直接调用现成的模型数据。这里主要讲述讲接口集成到我们自己的程序中使用方式。 微软提供了ML.NET来开发和使用AI模型,但是目前国内可能使用不多,至少实践例子很少看见。开发训练模型就不介绍了&am…...

Java面试专项一-准备篇
一、企业简历筛选规则 一般企业的简历筛选流程:首先由HR先筛选一部分简历后,在将简历给到对应的项目负责人后再进行下一步的操作。 HR如何筛选简历 例如:Boss直聘(招聘方平台) 直接按照条件进行筛选 例如:…...
-HIve数据分析)
大数据学习(132)-HIve数据分析
🍋🍋大数据学习🍋🍋 🔥系列专栏: 👑哲学语录: 用力所能及,改变世界。 💖如果觉得博主的文章还不错的话,请点赞👍收藏⭐️留言Ǵ…...

AI,如何重构理解、匹配与决策?
AI 时代,我们如何理解消费? 作者|王彬 封面|Unplash 人们通过信息理解世界。 曾几何时,PC 与移动互联网重塑了人们的购物路径:信息变得唾手可得,商品决策变得高度依赖内容。 但 AI 时代的来…...
springboot整合VUE之在线教育管理系统简介
可以学习到的技能 学会常用技术栈的使用 独立开发项目 学会前端的开发流程 学会后端的开发流程 学会数据库的设计 学会前后端接口调用方式 学会多模块之间的关联 学会数据的处理 适用人群 在校学生,小白用户,想学习知识的 有点基础,想要通过项…...

Git 3天2K星标:Datawhale 的 Happy-LLM 项目介绍(附教程)
引言 在人工智能飞速发展的今天,大语言模型(Large Language Models, LLMs)已成为技术领域的焦点。从智能写作到代码生成,LLM 的应用场景不断扩展,深刻改变了我们的工作和生活方式。然而,理解这些模型的内部…...