STM32 ---- 再次学习STM32F103C8T6/STM32F409IGT6
目录
一、环境搭建及介绍
关于STM32基础介绍
新建工程
外设案例
LED流水灯
蜂鸣器
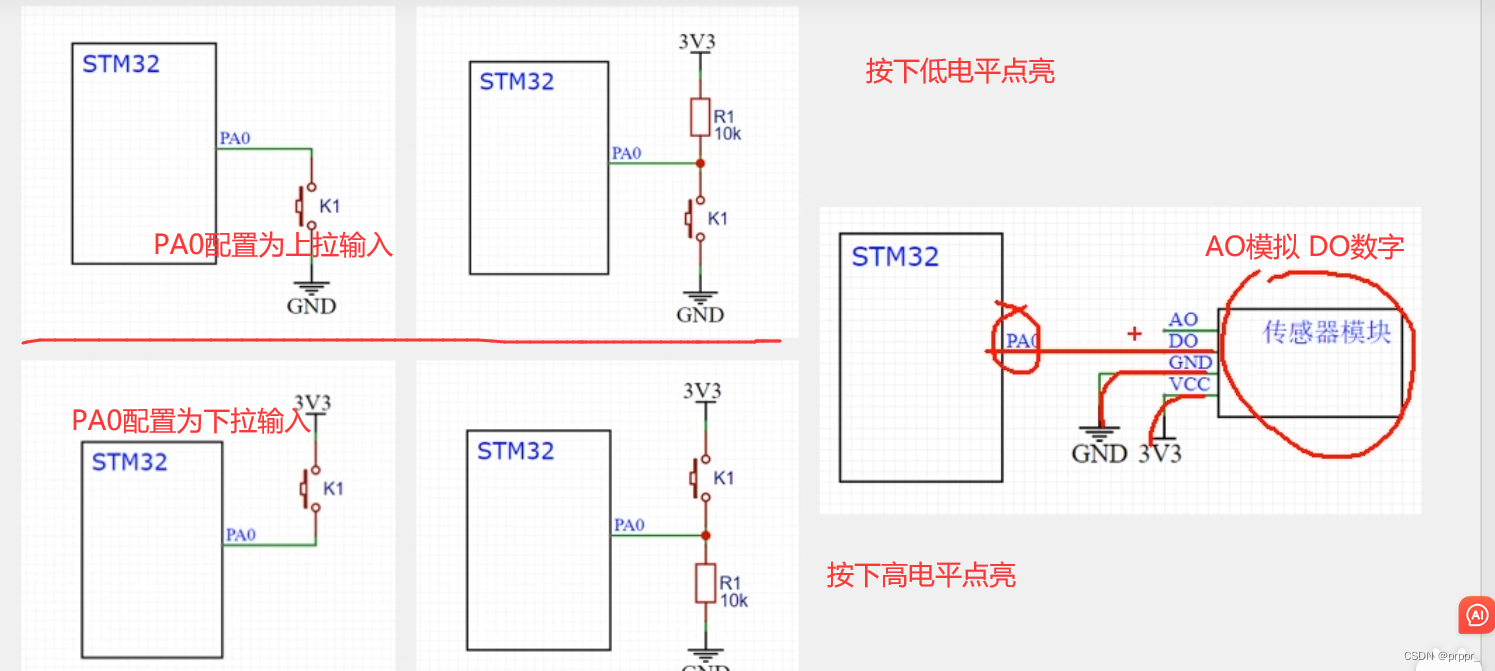
上拉电阻和下拉电阻知识
电压比较器
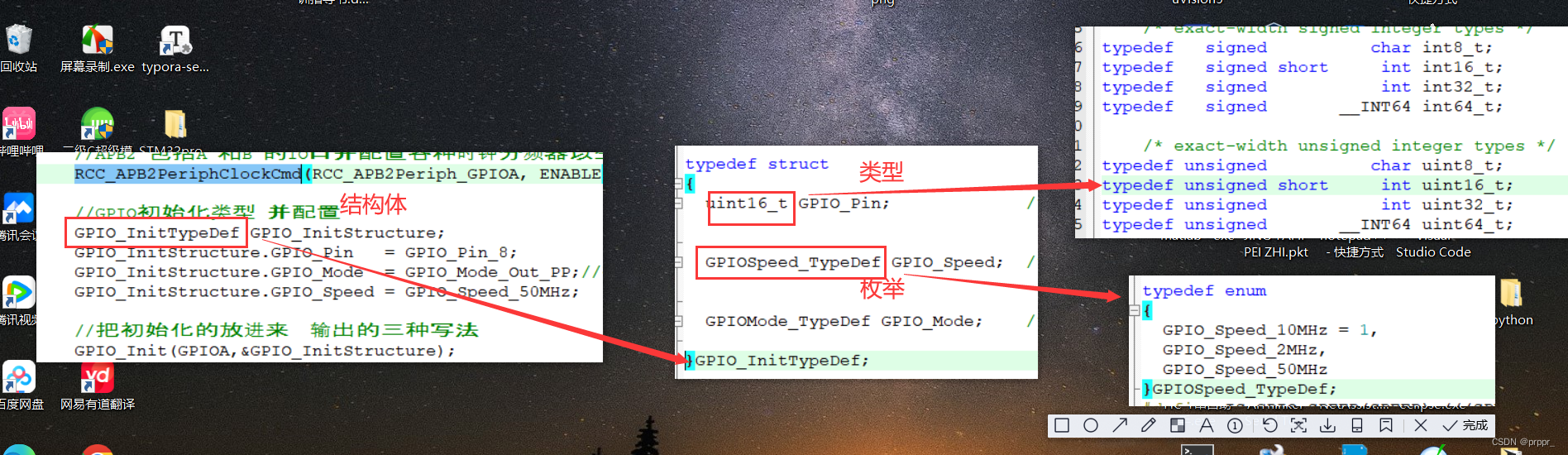
c语言基础知识 类型、结构体、枚举
类型int8_t int16_t int32_t
宏替换 #define 和typedef用法
结构体两种填充方法 和 命名规则
枚举用法
常用配置
输入输出模式
GPIO常用库函数
中断函数
模块化编程
延时函数 System
LED函数 Hardwore
按键函数 Hardwore
蜂鸣器函数 Hardwore
震动模块 Hardwore
OLED IIC模块Hardwore
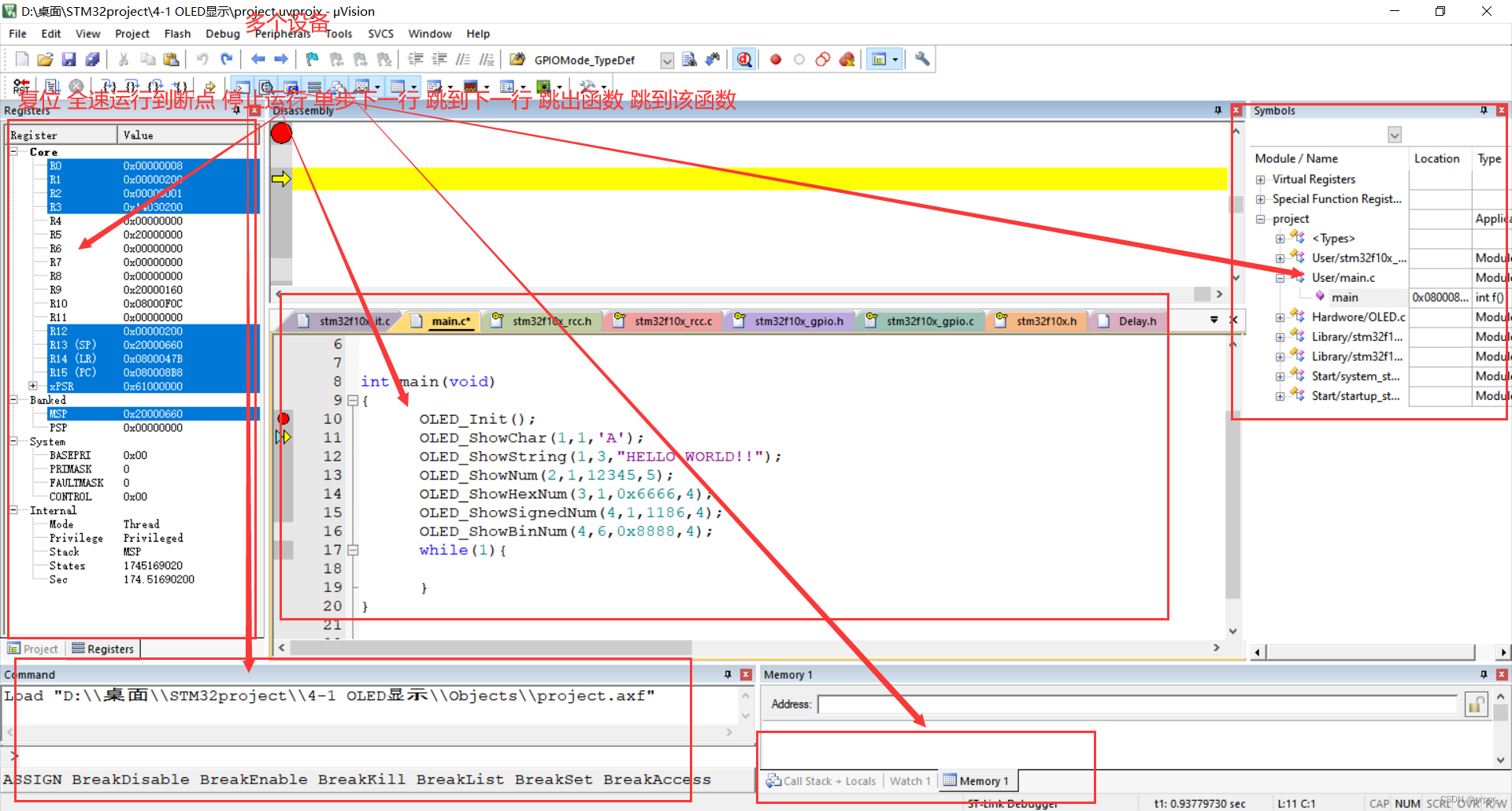
调试方法
中断系统
概念:
NVIC中断控制寄存器结构
NVIC分组 抢占优先级和响应优先级编辑
中断配置 --代码-----------------
两个中断时
定时器
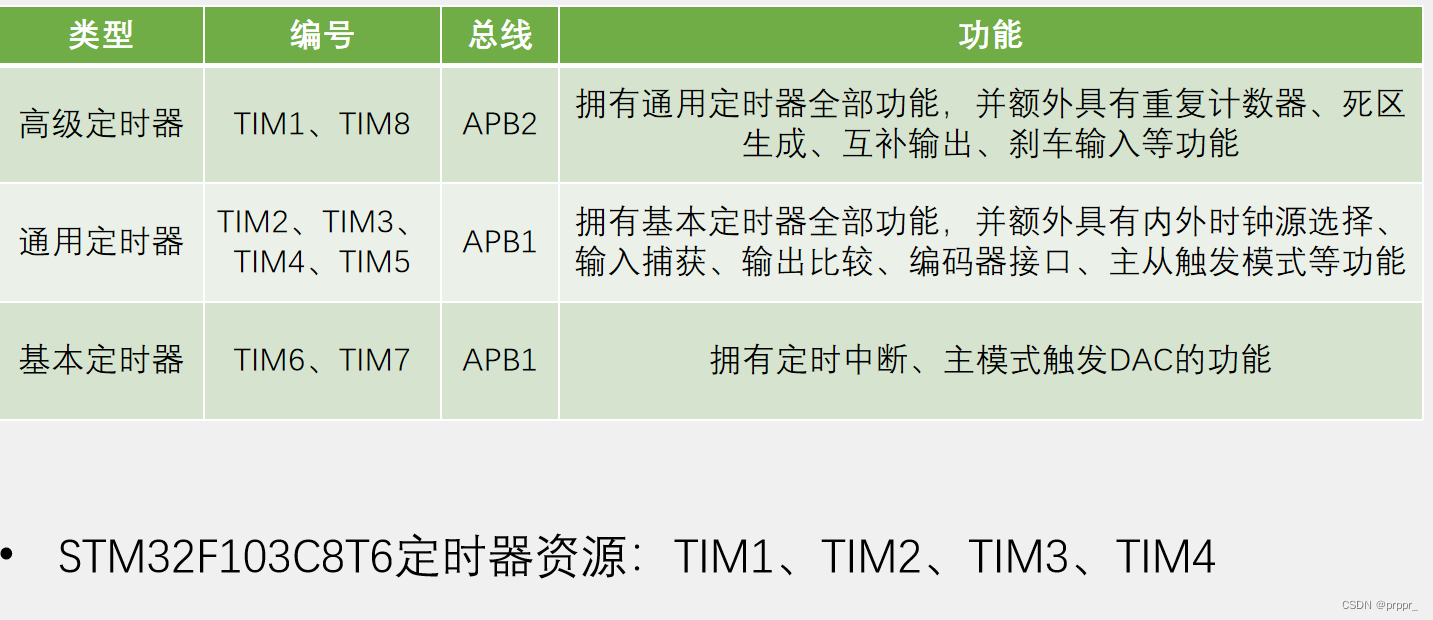
定时器类型
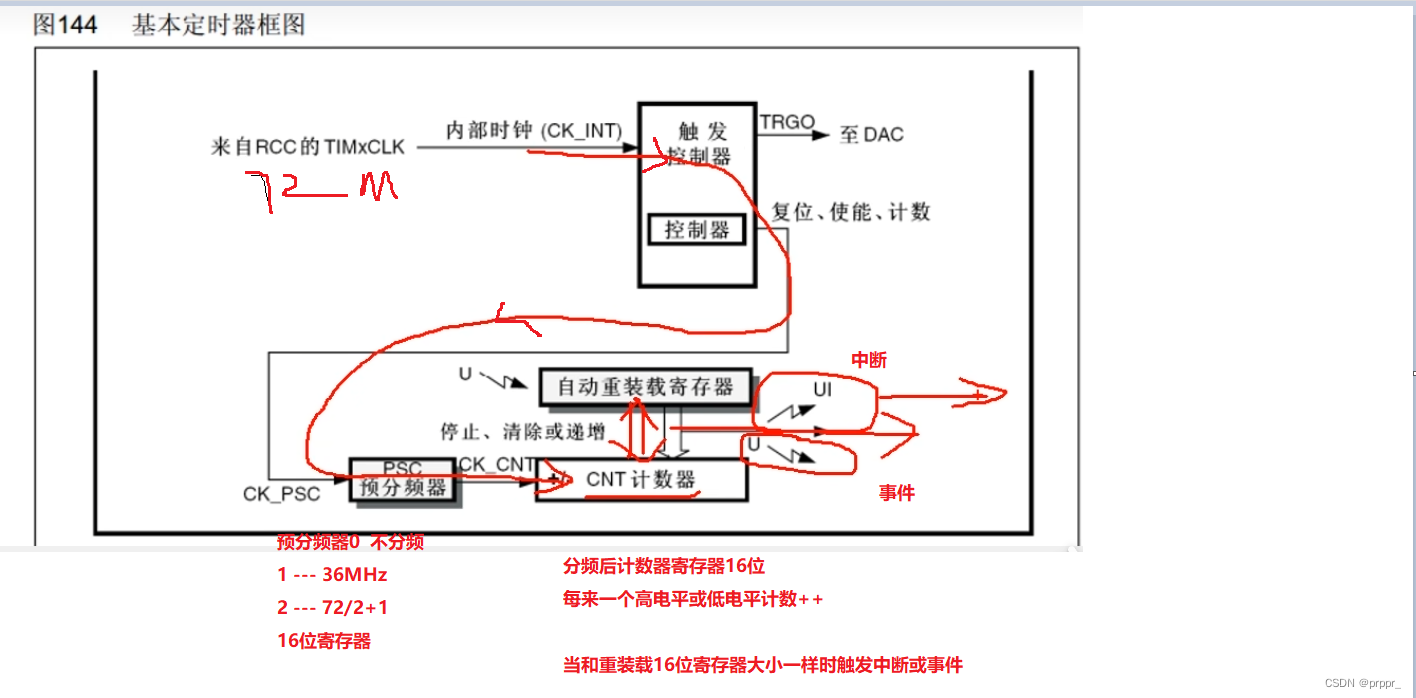
定时器时基----基本定时器
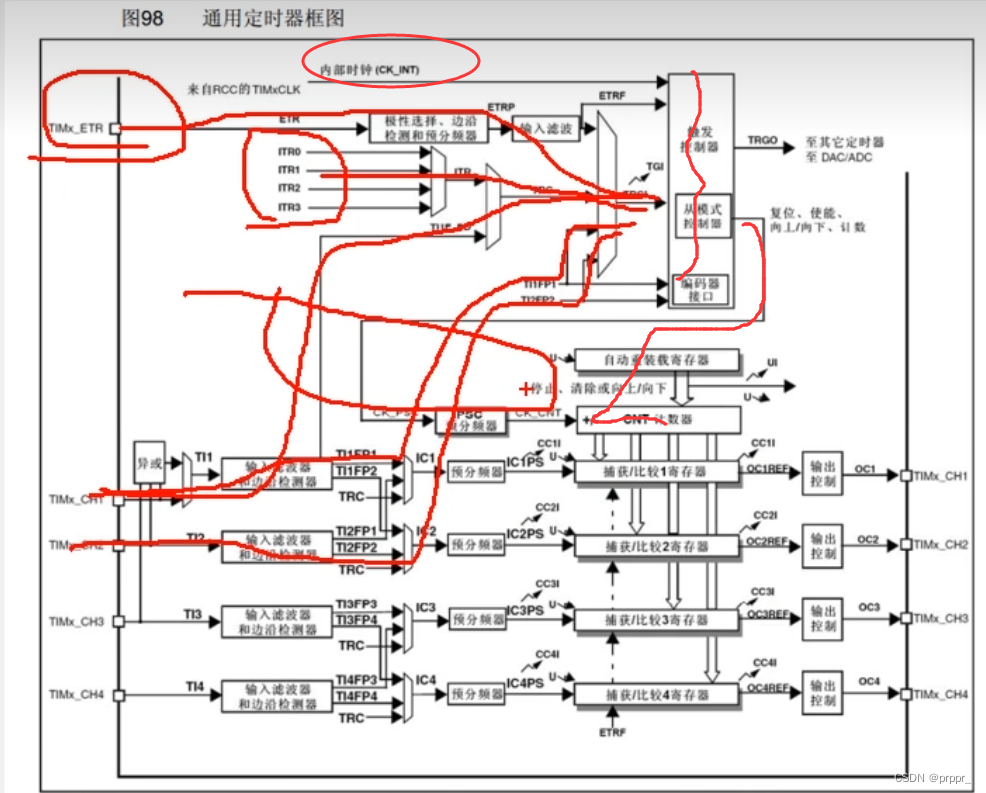
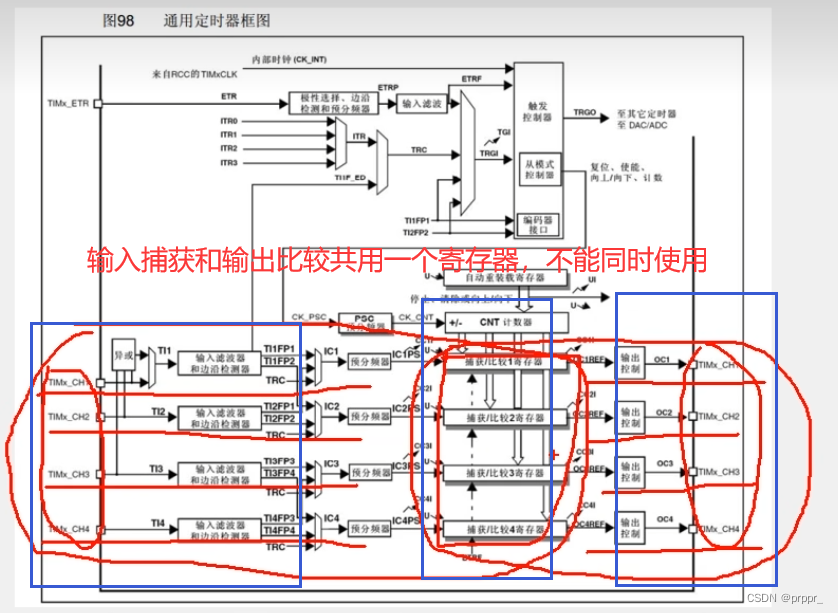
通用定时器时钟输入
编辑 高级定时器编辑
代码部分-----------------------------
定时器 ---- PWM
PWM控制呼吸灯 ----------------
PWM控制SG90舵机----------------
PWM驱动电机模块
输入捕获测频率
输入捕获测占空比
输入捕获编码器计数
一、环境搭建及介绍
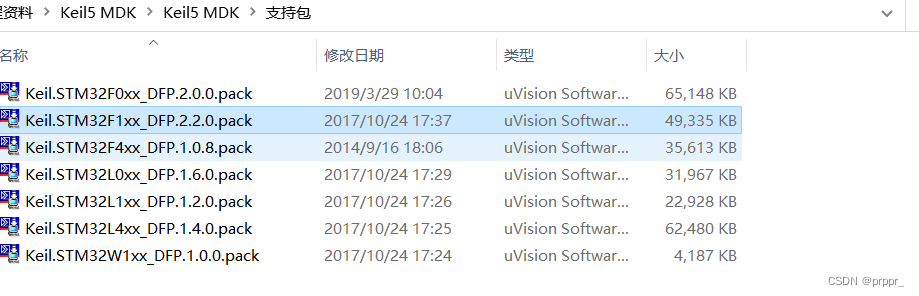
kile4 开发51单片机(内置芯片包)、kile_v5开发STM32手动添加芯片包、如果要开发51许把51的芯片包放在kile5中 、通过注册机key来破解
对应STM芯片包
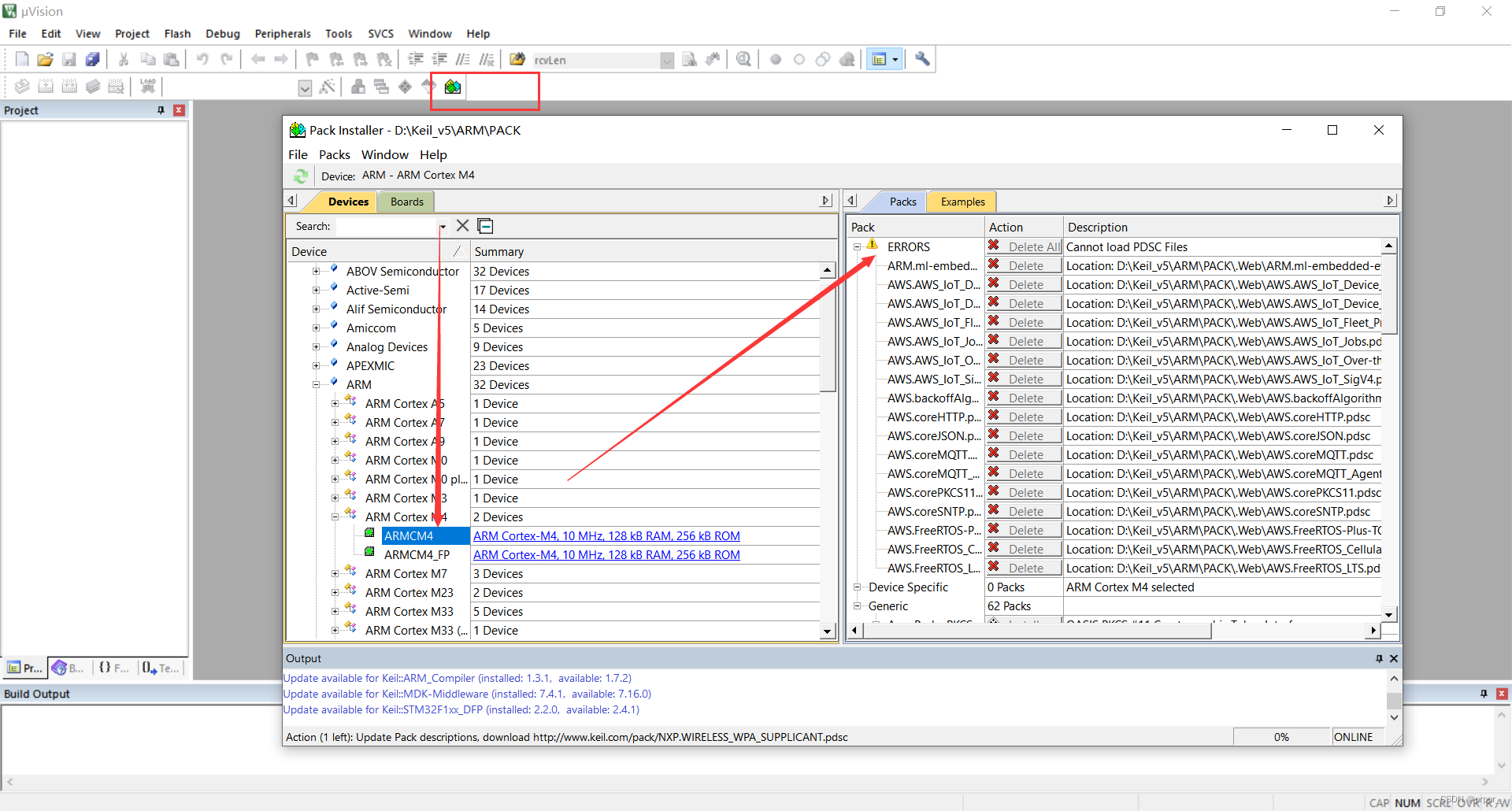
也可以通过 通过在线安装其它芯片包 ---- 可以找到GD 以及其他厂家的芯片包
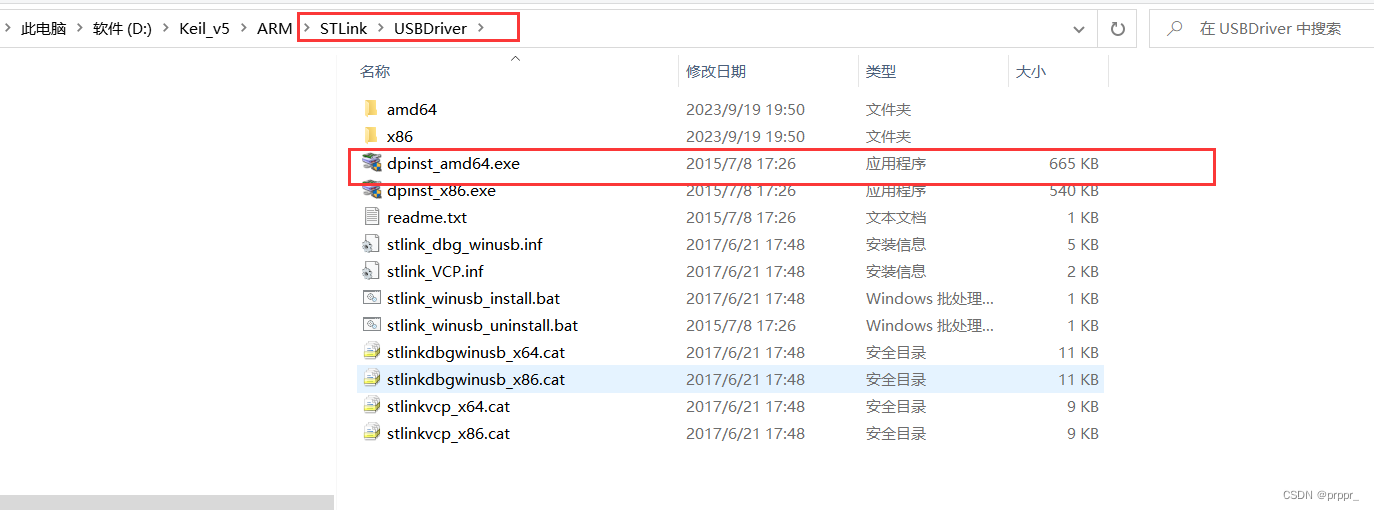
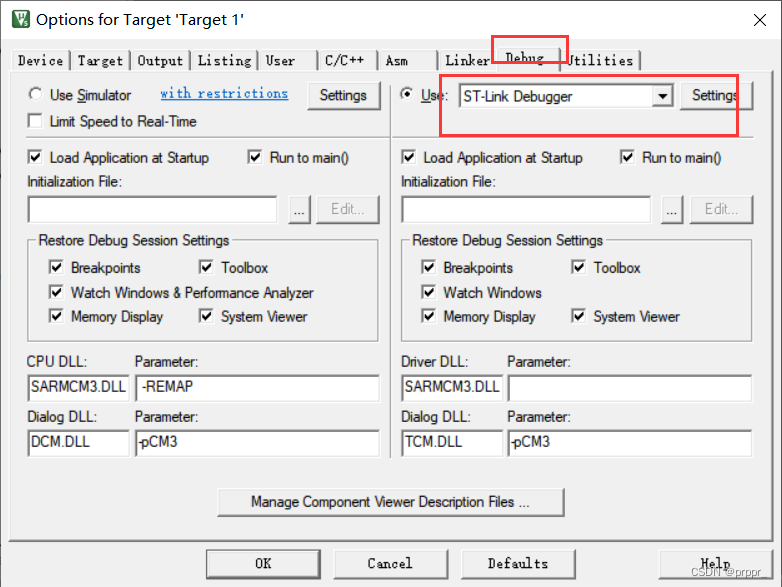
STLink驱动 和CH340驱动安装
管理员运行kile5 复制CLD到注册机 破解
关于STM32基础介绍
片上资源
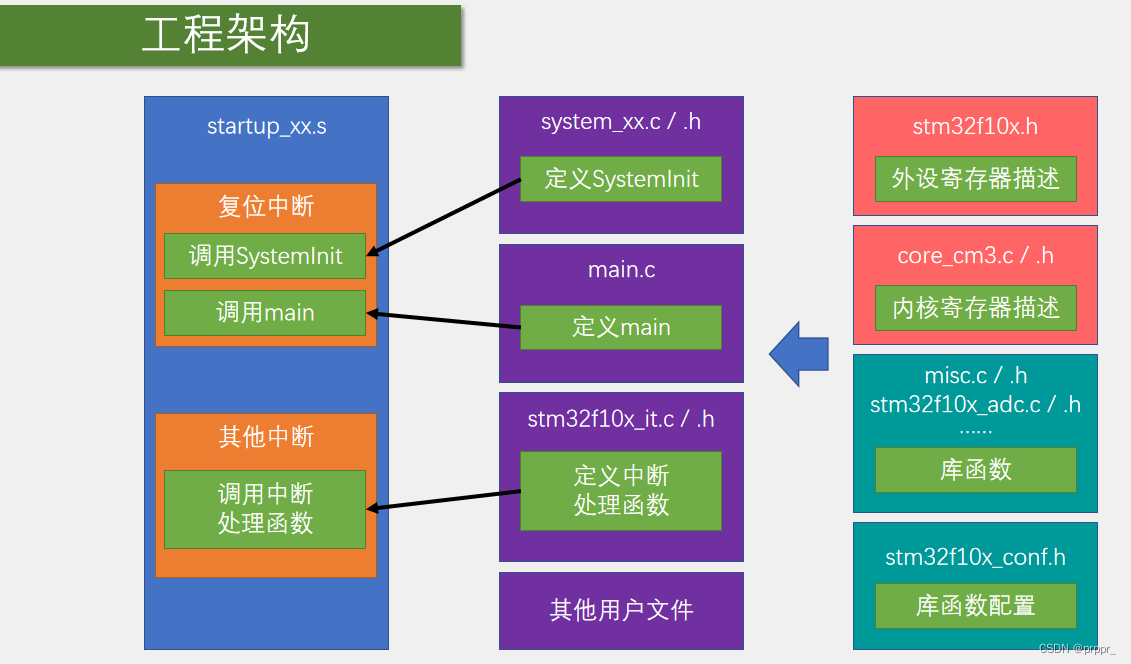
系统结构


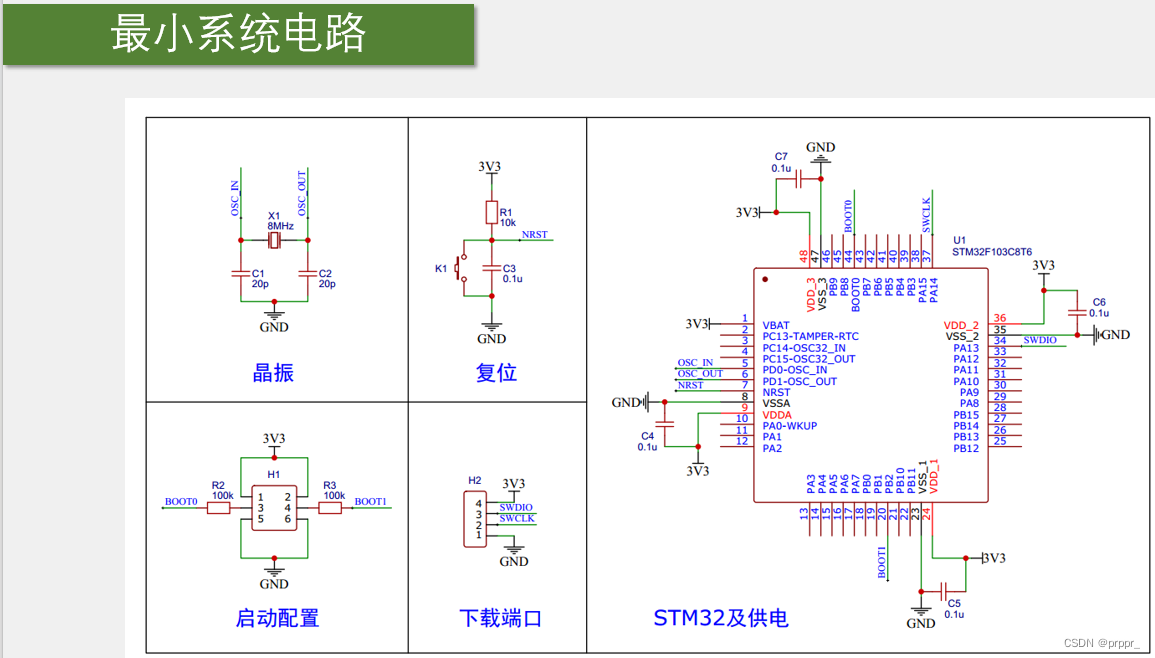
启动过程
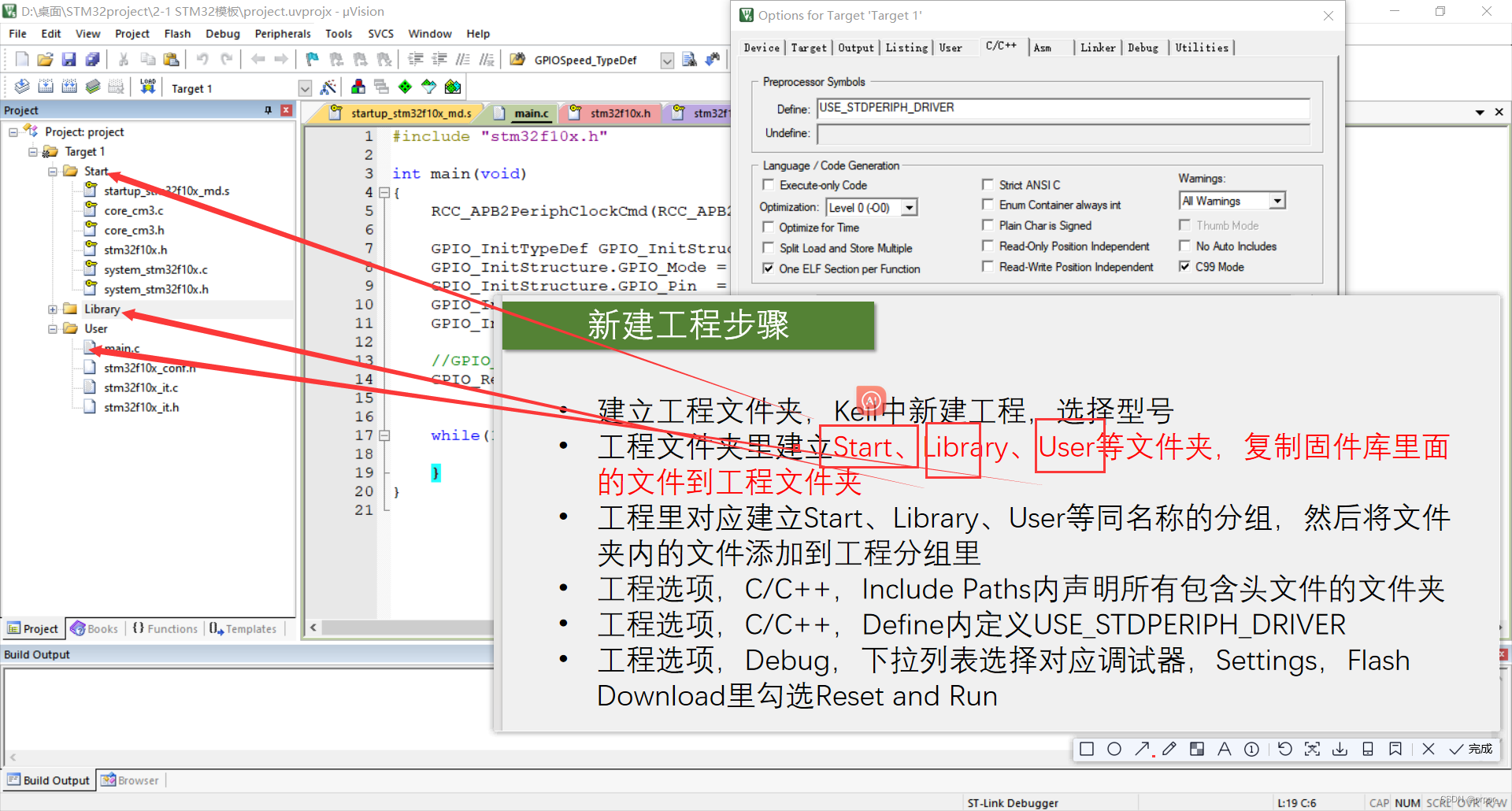
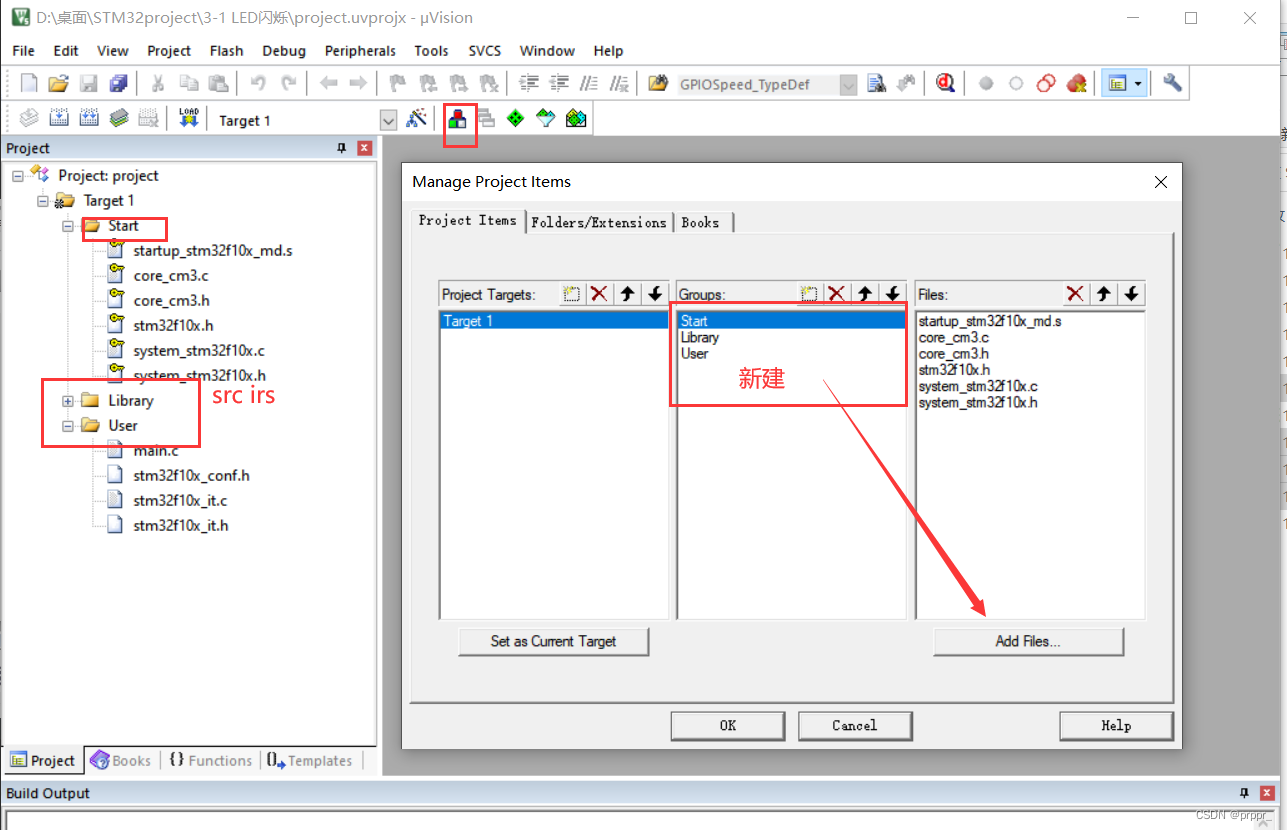
新建工程
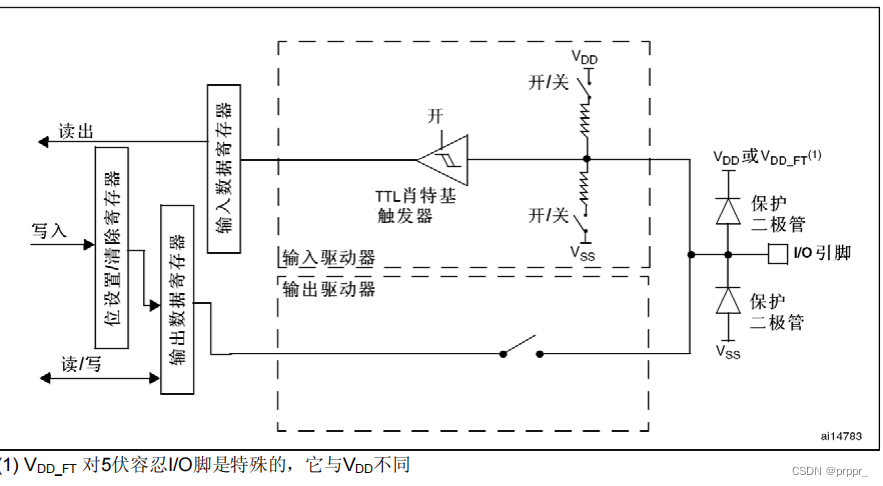
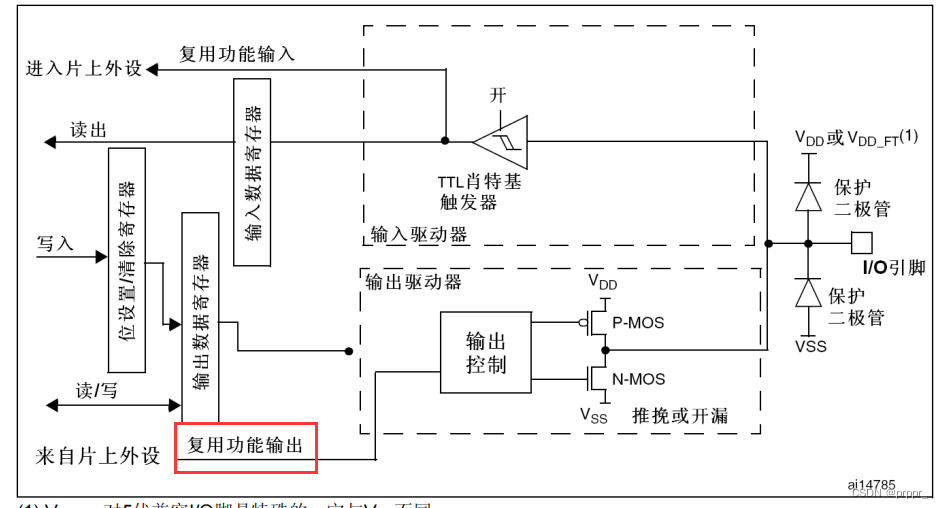
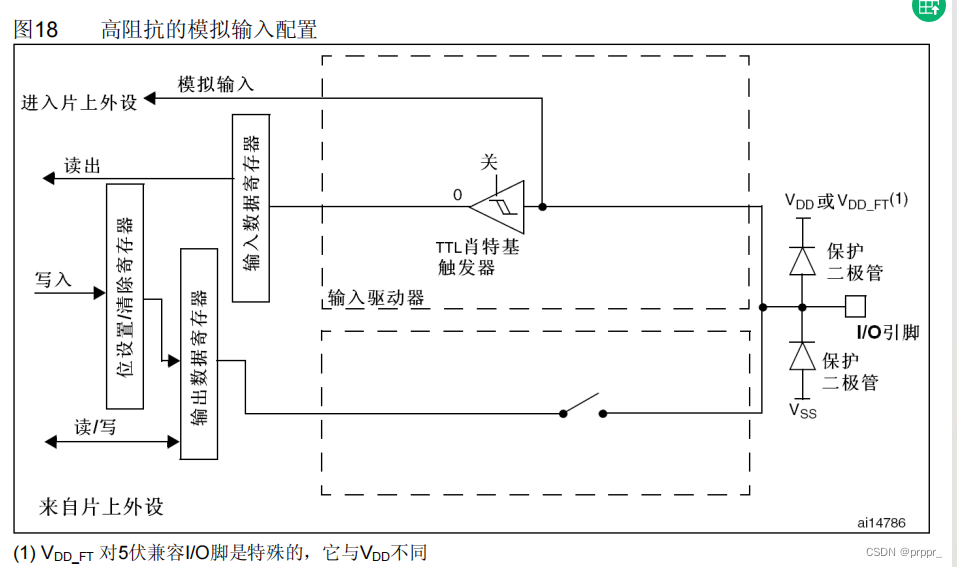
GPIO介绍

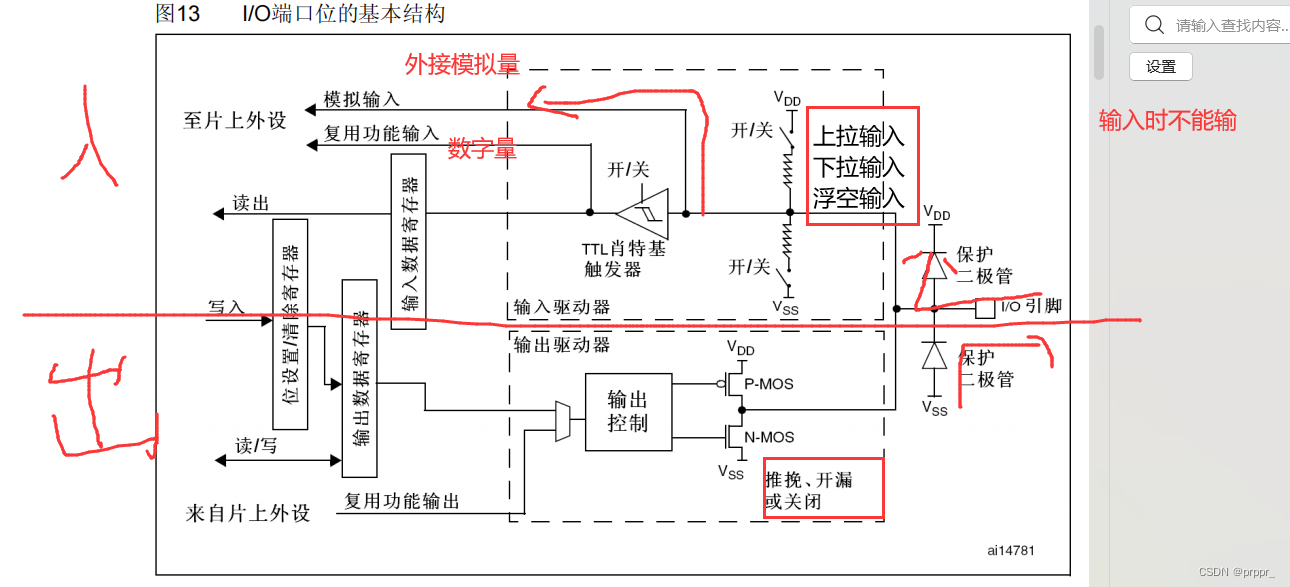

GPIO八种模式


新建工程



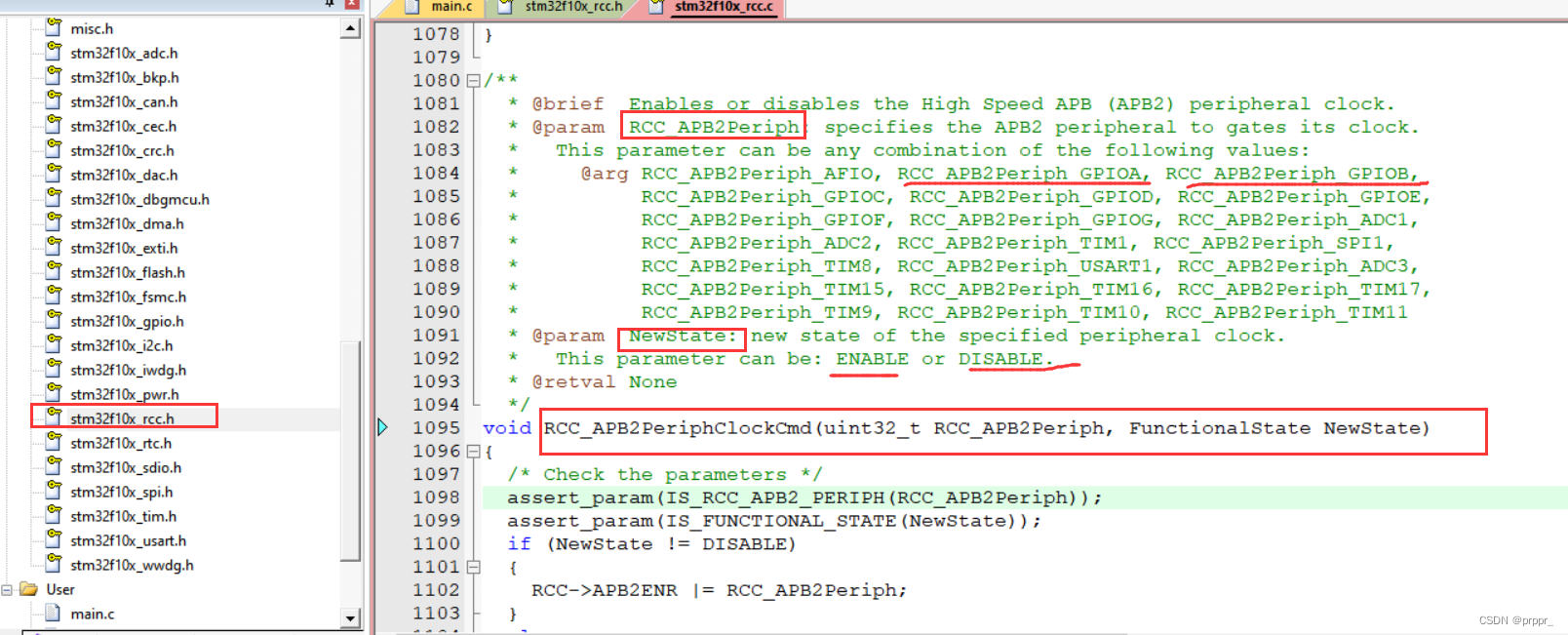
电灯流程 配置RCC外设时钟

//点亮一个LED
#include "stm32f10x.h" // Device headerint main(void)
{//APB2 包括A 和B 的IO口并配置各种时钟分频器以生成所需的时钟频率RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//GPIO初始化类型 并配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//把初始化的放进来 输出的三种写法GPIO_Init(GPIOB,&GPIO_InitStructure);//GPIOB拉低、拉高、在writeBit中拉高拉低GPIO_ResetBits(GPIOB,GPIO_Pin_5); //GPIO_SetBits(GPIOB,GPIO_Pin_5); //GPIO_WriteBit(GPIOB,GPIO_Pin_5,Bit_RESET); //GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);while(1){}
}
外设案例
LED流水灯
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{//APB2 包括A 和B 的IO口并配置各种时钟分频器以生成所需的时钟频率RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//也可以同时用或初始化AB//GPIO初始化类型 并配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽模式下 高低电平都有驱动能力点亮LED//GPIO_Mode_Out_OD 开漏输出 低电平才有驱动能力点灯 高电平没驱动能力GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//把初始化的放进来 输出的三种写法GPIO_Init(GPIOA,&GPIO_InitStructure);while(1){GPIO_Write(GPIOA,~0x0001);//0000 0000 0000 0001 B1引脚低电平Delay_ms(500);GPIO_Write(GPIOA,~0x0002);//0000 0000 0000 0010 Delay_ms(500);GPIO_Write(GPIOA,~0x0004);//0000 0000 0000 0100Delay_ms(500);GPIO_Write(GPIOA,~0x0008);//0000 0000 0000 1000Delay_ms(500);// GPIO_Write(GPIOA,~0x0010);//0000 0000 0001 0000
// Delay_ms(500);
// GPIO_Write(GPIOA,~0x0020);//0000 0000 0010 0000
// Delay_ms(500);
//
// GPIO_Write(GPIOA,~0x0040);//0000 0000 0100 0000
// Delay_ms(500);
// GPIO_Write(GPIOA,~0x0080);//0000 0000 1000 0000
// Delay_ms(500);}
}
蜂鸣器
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{//APB2 包括A 和B 的IO口并配置各种时钟分频器以生成所需的时钟频率RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//也可以同时用或初始化AB//GPIO初始化类型 并配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽模式下 高低电平都有驱动能力点亮LEDGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//把初始化的放进来 输出的三种写法GPIO_Init(GPIOA,&GPIO_InitStructure);while(1){//这是因为GPIO_Write函数本身的作用是将PortVal参数的位设置为1GPIO_Write(GPIOA,~GPIO_Pin_8);//GPIO_Write默认设置为高电平Delay_ms(100);GPIO_Write(GPIOA,GPIO_Pin_8);Delay_ms(100);GPIO_Write(GPIOA,~GPIO_Pin_8);Delay_ms(100);GPIO_Write(GPIOA,GPIO_Pin_8);Delay_ms(700);// GPIO_WriteBit(GPIOA,GPIO_Pin_8,Bit_RESET);
// Delay_ms(100);
// GPIO_WriteBit(GPIOA,GPIO_Pin_8,Bit_SET);
// Delay_ms(100);
// GPIO_WriteBit(GPIOA,GPIO_Pin_8,Bit_RESET);
// Delay_ms(100);
// GPIO_WriteBit(GPIOA,GPIO_Pin_8,Bit_SET);
// Delay_ms(700);}
}
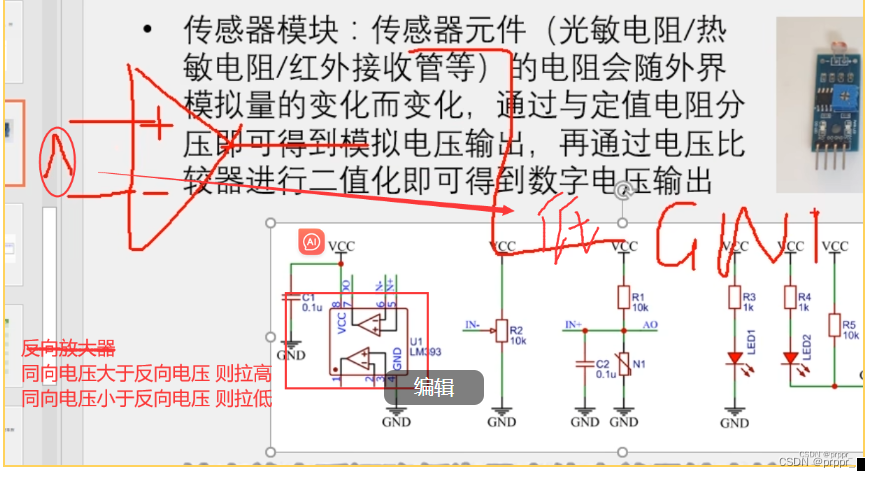
上拉电阻和下拉电阻知识
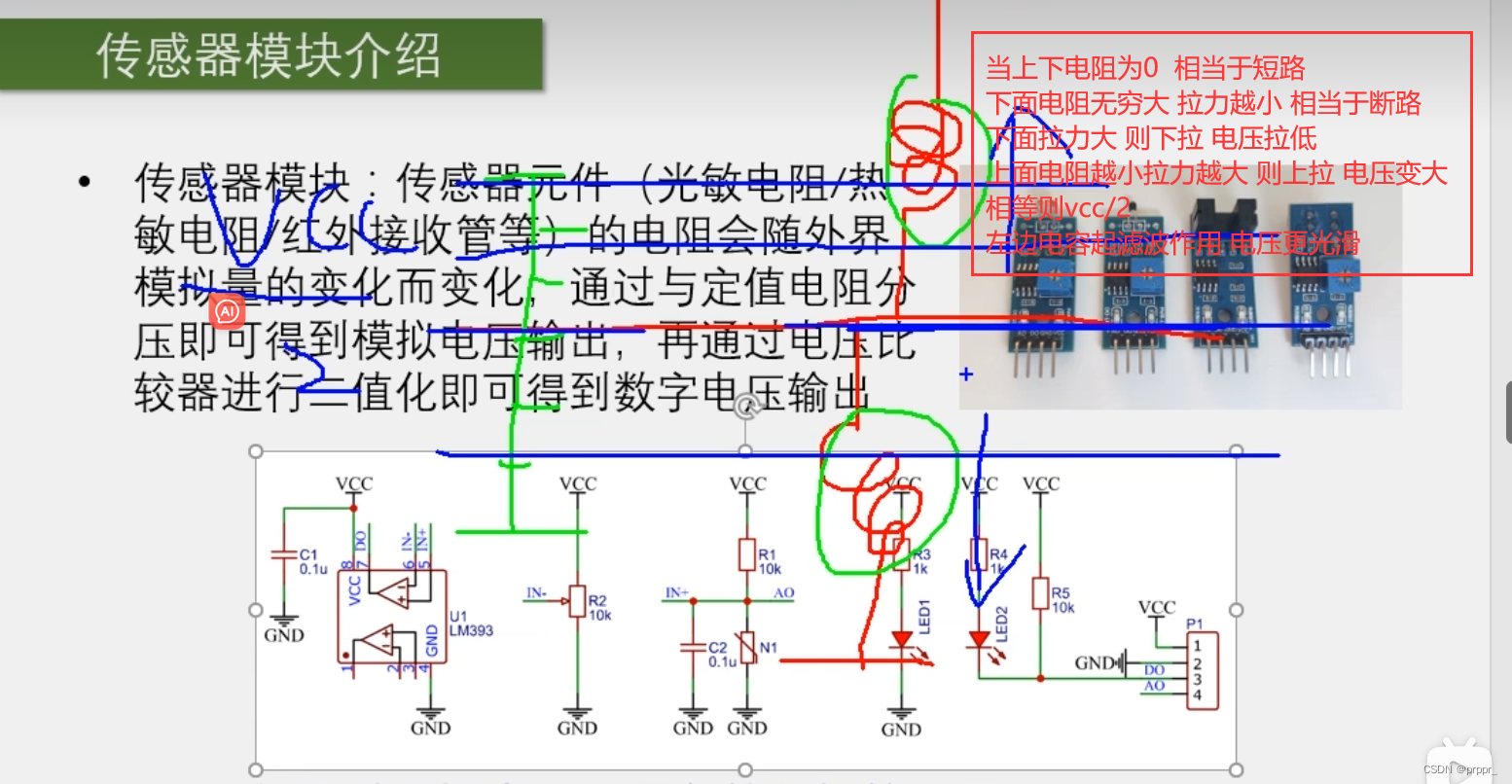
电压比较器
c语言基础知识 类型、结构体、枚举
类型int8_t int16_t int32_t

宏替换 #define 和typedef用法
typedef相对于更加安全
关键字:#define
用途:用一个字符串代替一个数字,便于理解,防止出错;提取程序中经常出现的参数,
便于快速修改 定义宏定义:
#define ABC 12345 引用宏定义: int a = ABC; //等效于int a = 12345;
关键字:typedef 用途:将一个比较长的变量类型名换个名字,便于使用 定义typedef: typedef unsigned char uint8_t; 引用typedef: uint8_t a; //等效于unsigned char a;
结构体两种填充方法 和 命名规则
枚举用法
关键字:enum 用途:定义一个取值受限制的整型变量,用于限制变量取值范围;宏定义的集合 定义枚举变量:
enum{FALSE = 0, TRUE = 1} EnumName; 因为枚举变量类型较长,所以通常用typedef更改变量类型名 引用枚举成员:
EnumName = FALSE; EnumName = TRUE;
常用配置
输入输出模式
GPIOMode_TypeDef枚举类型,该枚举类型包含了多个枚举成员,表示不同的 GPIO 模式。下面是对每个成员的中文注释:
GPIO_Mode_AIN:模拟输入模式GPIO_Mode_IN_FLOATING:浮空输入模式GPIO_Mode_IPD:下拉输入模式GPIO_Mode_IPU:上拉输入模式GPIO_Mode_Out_OD:开漏输出模式GPIO_Mode_Out_PP:推挽输出模式GPIO_Mode_AF_OD:复用开漏输出模式GPIO_Mode_AF_PP:复用推挽输出模式
GPIO常用库函数
void GPIO_DeInit(GPIO_TypeDef* GPIOx):用于将指定GPIO端口的所有配置重置为默认值。
void GPIO_AFIODeInit(void):用于将AFIO(Alternate Function I/O)寄存器的配置重置为默认值。
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct):用于初始化指定GPIO端口的引脚配置。通过GPIO_InitStruct结构体参数传递引脚相关配置,如引脚编号、引脚模式、引脚速度、引脚上拉/下拉等。
void GPIO_StructInit(GPIO_InitTypeDef* GPIO_InitStruct):用于将GPIO_InitStruct结构体中的成员设置为默认值。
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin):用于读取指定GPIO端口指定引脚号的输入电平(逻辑高或逻辑低)。
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx):用于读取指定GPIO端口的全部输入引脚的电平状态。
uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin):用于读取指定GPIO端口指定引脚号的输出电平(逻辑高或逻辑低)。
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx):用于读取指定GPIO端口的全部输出引脚的电平状态。
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin):用于将指定GPIO端口中指定引脚置为逻辑高电平。
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin):用于将指定GPIO端口中指定引脚置为逻辑低电平。
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal):用于设置指定GPIO端口中指定引脚的输出电平,BitVal参数可设置为Bit_RESET(低电平)或Bit_SET(高电平)。
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal):用于设置指定GPIO端口的全部输出引脚的电平状态。PortVal参数是一个16位的数值,每个位对应一个引脚,可设置为逻辑低或逻辑高。
void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin):用于锁定指定GPIO端口的指定引脚,防止意外改变其配置。
void GPIO_EventOutputConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource):用于配置GPIO的事件输出功能,将指定的GPIO端口和引脚映射到事件输出信号线上。
void GPIO_EventOutputCmd(FunctionalState NewState):用于使能或禁用GPIO的事件输出功能。
void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState):用于重新映射GPIO端口的引脚,将其连接到其他IO端口或功能。
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource):用于配置GPIO的外部中断线路,将指定的GPIO端口和引脚映射到外部中断线上。
void GPIO_ETH_MediaInterfaceConfig(uint32_t GPIO_ETH_MediaInterface):用于配置GPIO端口的以太网媒体接口(MII或RMII)。
中断函数
void EXTI_DeInit(void):用于将外部中断配置重置为默认值。
void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct):用于根据指定的配置参数初始化外部中断。
void EXTI_StructInit(EXTI_InitTypeDef* EXTI_InitStruct):用于将外部中断配置结构体EXTI_InitStruct的成员设置为默认值。
void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line):用于生成指定外部中断线的软件中断。可以用于模拟外部中断触发。
FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line):用于获取指定外部中断线的中断标志状态。返回值为SET(中断标志置位)或RESET(中断标志未置位)。
void EXTI_ClearFlag(uint32_t EXTI_Line):用于清除指定外部中断线的中断标志。将中断标志置位。
ITStatus EXTI_GetITStatus(uint32_t EXTI_Line):用于获取指定外部中断线的中断状态。返回值为SET(中断状态已触发)或RESET(中断状态未触发)。
void EXTI_ClearITPendingBit(uint32_t EXTI_Line):用于清除指定外部中断线的中断挂起位。将中断挂起位复位。
模块化编程
延时函数 System
#include "stm32f10x.h"/*** @brief 微秒级延时* @param xus 延时时长,范围:0~233015* @retval 无*/
void Delay_us(uint32_t xus)
{SysTick->LOAD = 72 * xus; //设置定时器重装值SysTick->VAL = 0x00; //清空当前计数值SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器while(!(SysTick->CTRL & 0x00010000)); //等待计数到0SysTick->CTRL = 0x00000004; //关闭定时器
}/*** @brief 毫秒级延时* @param xms 延时时长,范围:0~4294967295* @retval 无*/
void Delay_ms(uint32_t xms)
{while(xms--){Delay_us(1000);}
}/*** @brief 秒级延时* @param xs 延时时长,范围:0~4294967295* @retval 无*/
void Delay_s(uint32_t xs)
{while(xs--){Delay_ms(1000);}
}
LED函数 Hardwore
#include "stm32f10x.h" // Device header//LED初始化
void LED_Init(void)
{ //配置寄存器A时钟使能RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//结构体名字 及配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;//配置完初始化 初始化后灯会亮GPIO_Init(GPIOB,&GPIO_InitStructure);//把该引脚拉高灯灭GPIO_SetBits(GPIOB,GPIO_Pin_8|GPIO_Pin_9);
}//LED1 开
void LED1_ON(void)
{GPIO_ResetBits(GPIOB,GPIO_Pin_8);
}
//LED1 关
void LED1_OFF(void)
{GPIO_SetBits(GPIOB,GPIO_Pin_8);
}
//LED2 开
void LED2_ON(void)
{GPIO_ResetBits(GPIOB,GPIO_Pin_9);
}
//LED2 关
void LED2_OFF(void)
{GPIO_SetBits(GPIOB,GPIO_Pin_9);
}
//LED1按键反转
void LED1_Turn(void)
{ //如果是低电平正在亮就灭 拉高if(GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_8) == 0){GPIO_SetBits(GPIOB,GPIO_Pin_8);}else{//否则就是熄灭状态 就拉低 灯亮GPIO_ResetBits(GPIOB,GPIO_Pin_8);}
}void LED2_Turn(void)
{ //如果是低电平正在亮就灭 拉高if(GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_9) == 0){GPIO_SetBits(GPIOB,GPIO_Pin_9);}else{//否则就是熄灭状态 就拉低 灯亮GPIO_ResetBits(GPIOB,GPIO_Pin_9);}
}按键函数 Hardwore
#include "stm32f10x.h" // Device header
#include "Delay.h"//按键 初始化 PA0 PA1 设置为上拉输入
void Key_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入 看原理图GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);
}//获取按键值 注意返回类型uint8_t unsigned char GPIO_ReadInputDataBit读取一个位 返回0或1
uint8_t Key_getNum(void)
{uint8_t keyNum = 0;//如果按键1 按下 延时消抖 还是按下状态 消抖 keyNum赋值1if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0) == 0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0) == 0);Delay_ms(20);keyNum = 1;}//如果按键2 按下 延时消抖 还是按下状态 消抖 keyNum赋值2if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_1) == 0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_1) == 0);Delay_ms(20);keyNum = 2;}return keyNum;}蜂鸣器函数 Hardwore
#include "stm32f10x.h" // Device header//蜂鸣器初始化
void Buzzer_Init(void)
{ //配置寄存器A时钟使能RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//结构体名字 及配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;//配置完初始化 初始化后灯会亮GPIO_Init(GPIOA,&GPIO_InitStructure);//把该引脚拉高灯灭//GPIO_SetBits(GPIOA,GPIO_Pin_8);
}//蜂鸣器 开
void Buzzer_ON(void)
{GPIO_ResetBits(GPIOA,GPIO_Pin_8);
}
//蜂鸣器 关
void Buzzer_OFF(void)
{GPIO_SetBits(GPIOA,GPIO_Pin_8);
}//蜂鸣器 反转
void Buzzer_Turn(void)
{ //如果是低电平正在亮就灭 拉高if(GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_8) == 0){GPIO_SetBits(GPIOB,GPIO_Pin_8);}else{//否则就是熄灭状态 就拉低 灯亮GPIO_ResetBits(GPIOA,GPIO_Pin_8);}
}
震动模块 Hardwore
输入
#include "stm32f10x.h" // Device header//震动模块 初始化 PA4 设置为上拉输入
void Shock_Init()
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入 看原理图GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);
}//获取震动传感器的值 有震动返回0 没有就是高
uint8_t Shock_getMsg()
{return GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_4);}OLED IIC模块Hardwore
#include "stm32f10x.h"
#include "OLED_Font.h"/*引脚配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x))/*引脚初始化*/
void OLED_I2C_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;//开楼输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_Init(GPIOB, &GPIO_InitStructure);OLED_W_SCL(1);OLED_W_SDA(1);
}/*** @brief I2C开始* @param 无* @retval 无*/
void OLED_I2C_Start(void)
{OLED_W_SDA(1);OLED_W_SCL(1);OLED_W_SDA(0);OLED_W_SCL(0);
}/*** @brief I2C停止* @param 无* @retval 无*/
void OLED_I2C_Stop(void)
{OLED_W_SDA(0);OLED_W_SCL(1);OLED_W_SDA(1);
}/*** @brief I2C发送一个字节* @param Byte 要发送的一个字节* @retval 无*/
void OLED_I2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i++){OLED_W_SDA(Byte & (0x80 >> i));OLED_W_SCL(1);OLED_W_SCL(0);}OLED_W_SCL(1); //额外的一个时钟,不处理应答信号OLED_W_SCL(0);
}/*** @brief OLED写命令* @param Command 要写入的命令* @retval 无*/
void OLED_WriteCommand(uint8_t Command)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //从机地址OLED_I2C_SendByte(0x00); //写命令OLED_I2C_SendByte(Command); OLED_I2C_Stop();
}/*** @brief OLED写数据* @param Data 要写入的数据* @retval 无*/
void OLED_WriteData(uint8_t Data)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //从机地址OLED_I2C_SendByte(0x40); //写数据OLED_I2C_SendByte(Data);OLED_I2C_Stop();
}/*** @brief OLED设置光标位置* @param Y 以左上角为原点,向下方向的坐标,范围:0~7* @param X 以左上角为原点,向右方向的坐标,范围:0~127* @retval 无*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{OLED_WriteCommand(0xB0 | Y); //设置Y位置OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位
}/*** @brief OLED清屏* @param 无* @retval 无*/
void OLED_Clear(void)
{ uint8_t i, j;for (j = 0; j < 8; j++){OLED_SetCursor(j, 0);for(i = 0; i < 128; i++){OLED_WriteData(0x00);}}
}/*** @brief OLED显示一个字符* @param Line 行位置,范围:1~4* @param Column 列位置,范围:1~16* @param Char 要显示的一个字符,范围:ASCII可见字符* @retval 无*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{ uint8_t i;OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容}OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容}
}/*** @brief OLED显示字符串* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param String 要显示的字符串,范围:ASCII可见字符* @retval 无*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{uint8_t i;for (i = 0; String[i] != '\0'; i++){OLED_ShowChar(Line, Column + i, String[i]);}
}/*** @brief OLED次方函数* @retval 返回值等于X的Y次方*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{uint32_t Result = 1;while (Y--){Result *= X;}return Result;
}/*** @brief OLED显示数字(十进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~4294967295* @param Length 要显示数字的长度,范围:1~10* @retval 无*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}/*** @brief OLED显示数字(十进制,带符号数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:-2147483648~2147483647* @param Length 要显示数字的长度,范围:1~10* @retval 无*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{uint8_t i;uint32_t Number1;if (Number >= 0){OLED_ShowChar(Line, Column, '+');Number1 = Number;}else{OLED_ShowChar(Line, Column, '-');Number1 = -Number;}for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}/*** @brief OLED显示数字(十六进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~0xFFFFFFFF* @param Length 要显示数字的长度,范围:1~8* @retval 无*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i, SingleNumber;for (i = 0; i < Length; i++) {SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;if (SingleNumber < 10){OLED_ShowChar(Line, Column + i, SingleNumber + '0');}else{OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');}}
}/*** @brief OLED显示数字(二进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~1111 1111 1111 1111* @param Length 要显示数字的长度,范围:1~16* @retval 无*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');}
}/*** @brief OLED初始化* @param 无* @retval 无*/
void OLED_Init(void)
{uint32_t i, j;for (i = 0; i < 1000; i++) //上电延时{for (j = 0; j < 1000; j++);}OLED_I2C_Init(); //端口初始化OLED_WriteCommand(0xAE); //关闭显示OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率OLED_WriteCommand(0x80);OLED_WriteCommand(0xA8); //设置多路复用率OLED_WriteCommand(0x3F);OLED_WriteCommand(0xD3); //设置显示偏移OLED_WriteCommand(0x00);OLED_WriteCommand(0x40); //设置显示开始行OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置OLED_WriteCommand(0xDA); //设置COM引脚硬件配置OLED_WriteCommand(0x12);OLED_WriteCommand(0x81); //设置对比度控制OLED_WriteCommand(0xCF);OLED_WriteCommand(0xD9); //设置预充电周期OLED_WriteCommand(0xF1);OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别OLED_WriteCommand(0x30);OLED_WriteCommand(0xA4); //设置整个显示打开/关闭OLED_WriteCommand(0xA6); //设置正常/倒转显示OLED_WriteCommand(0x8D); //设置充电泵OLED_WriteCommand(0x14);OLED_WriteCommand(0xAF); //开启显示OLED_Clear(); //OLED清屏
}
字库
#ifndef __OLED_FONT_H
#define __OLED_FONT_H/*OLED字模库,宽8像素,高16像素*/
const uint8_t OLED_F8x16[][16]=
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 00x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 10x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 20x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 30x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 40xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 50x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 60x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 70x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 80x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 90x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 100x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 110x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 120x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 130x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 140x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 150x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 160x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 170x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 180x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 190x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 200x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 210x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 220x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 230x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 240x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 250x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 260x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 270x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 280x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 290x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 300x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 310xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 320x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 330x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 340xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 350x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 360x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 370x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 380xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 390x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 400x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 410x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 420x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 430x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 440x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 450x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 460xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 470x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 480xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 490x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 500x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 510x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 520x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 530x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 540xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 550x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 560x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 570x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 580x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 590x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 600x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 610x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 620x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 630x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 640x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 650x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 660x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 670x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 680x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 690x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 700x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 710x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 720x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 730x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 740x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 750x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 760x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 770x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 780x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 790x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 800x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 810x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 820x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 830x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 840x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 850x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 860x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 870x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 880x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 890x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 900x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 910x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 920x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 930x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};#endif
调试方法
串口打印 、oled、 电灯、kile调试 通过各种现象调试
kile点击放大镜调试、板子实时在跑,若要修改函数则需要先停止调试功能
中断系统
概念:
中断:在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前正在运行的程序,转而去处理中断程序,处理完成后又返回原来被暂停的位置继续运行
中断优先级:当有多个中断源同时申请中断时,CPU会根据中断源的轻重缓急进行裁决,优先响应更加紧急的中断源
中断嵌套:当一个中断程序正在运行时,又有新的更高优先级的中断源申请中断,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次进行返回
NVIC中断控制寄存器结构

NVIC分组 抢占优先级和响应优先级

中断配置 --代码-----------------
中断 oled刷新count的值
触发中断和触发事件 触发事件不会经过cpu直接反应事件

#include "stm32f10x.h" // Device headeruint16_t CountSensor_count;
void CountSensor_Init(void)
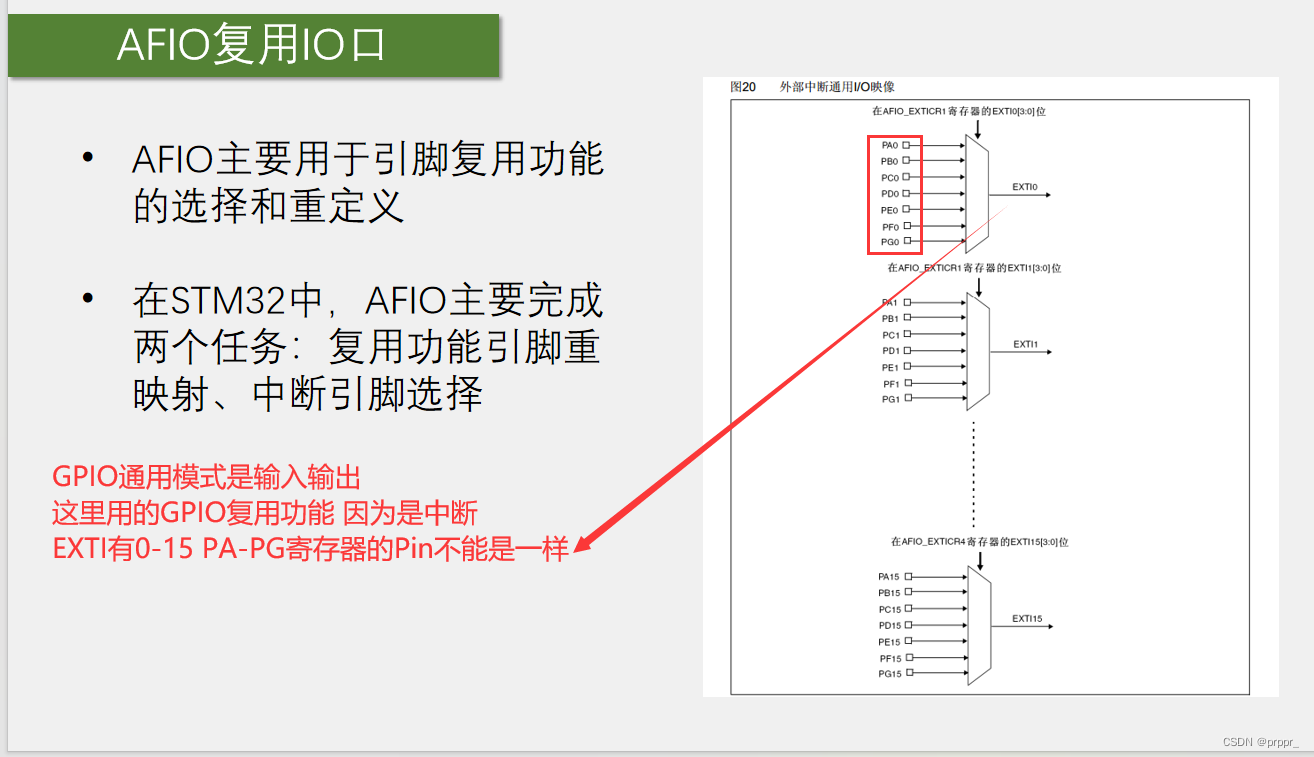
{//RCC 时钟配置RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//GPIO初始化配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure);//AFIO初始化配置 GPIO引脚到外部中断线的映射配置GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);//EXTI初始化配置EXTI_InitTypeDef EXTI_InitStructure;EXTI_InitStructure.EXTI_Line = EXTI_Line14;//中断线14EXTI_InitStructure.EXTI_LineCmd= ENABLE;//使能EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断 另一个是事件EXTI_InitStructure.EXTI_Trigger= EXTI_Trigger_Falling;//触发方式 上升沿 下降沿 上升下降沿都出触发EXTI_Init(&EXTI_InitStructure);//指定GPIO端口和引脚映射到外部中断线上//配置NVICNVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//用于配置中断优先级分组。中断优先级分组决定了中断优先级的划分方式NVIC_InitTypeDef NVIC_InitStructure; //结构体配置NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;//指定中断线NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//响应中断优先级 0-14NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//抢占中断优先级 0-14NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//开启NVIC_Init(&NVIC_InitStructure);//初始化中断控制寄存器
}//返回count的值
uint16_t CountSensor_Get(void)
{return CountSensor_count;
}//10-15的中断处理函数 当发生中断就跳转到该函数 后要清楚中断标志位
void EXTI15_10_IRQHandler(void)
{ //检测是不是14引脚触发中断 SET触发中断if(EXTI_GetITStatus(EXTI_Line14) == SET){//读取该引脚电平是否拉低 0 是count++if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14) == Bit_RESET){CountSensor_count++;}EXTI_ClearITPendingBit(EXTI_Line14);}
}
/*
按键中断电灯
*/
#include "stm32f10x.h" // Device header
#include "LED.h" void CountSensor_Init(void)
{//rcc 设置PPIOA时钟和复用口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//gpio afio配置GPIO和映射到复用口GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource0);GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource1); //exti配置exti中断 EXTI_InitTypeDef EXTI_InitStructure;EXTI_InitStructure.EXTI_Line = EXTI_Line0|EXTI_Line1;//中断映射pinEXTI_InitStructure.EXTI_LineCmd = ENABLE;//使能开启中断EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//产生中断 还是事件EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降延触发EXTI_Init(&EXTI_InitStructure);//NVIC_Prior 中断分组 5组 0 1 2(0-3抢占 0-3响应) 3 4 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//nvic分组后初始化配置 两个角可以共用一个结构体NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;//中断向量NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//抢占优先级 -- 根据分来来填写NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;//响应优先级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;//中断向量NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//抢占优先级 -- 根据分来来填写NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;//响应优先级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//NVIC_Init(&NVIC_InitStructure);}//引脚0外部中断
void EXTI0_IRQHandler(void)
{if(EXTI_GetITStatus(EXTI_Line0) == SET){ //检测0是否按下LED1_ON(); //开灯EXTI_ClearITPendingBit(EXTI_Line0);//清除标志位}
}//引脚1外部中断
void EXTI1_IRQHandler(void)
{if(EXTI_GetITStatus(EXTI_Line1) == SET){//检测0是否按下LED1_OFF(); //关灯EXTI_ClearITPendingBit(EXTI_Line1);//清除标志位}
}
#include "stm32f10x.h" // Device header
#include "Shock.h"
#include "Buzzer.h"
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"int main(void)
{OLED_Init();CountSensor_Init();OLED_ShowString(1, 1, "Count:");while (1){OLED_ShowNum(1, 7, CountSensor_Get(),5);}
}两个中断时
#include "stm32f10x.h" // Device header
int16_t Encoder_Count;void Encoder_Init(void)
{//RCC 时钟配置RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//GPIO初始化配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1;//初始化引脚0 和 1GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure);//AFIO初始化配置 GPIO引脚到外部中断线的映射配置GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource0);GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource1);//EXTI初始化配置EXTI_InitTypeDef EXTI_InitStructure;EXTI_InitStructure.EXTI_Line = EXTI_Line0|EXTI_Line1;//中断线0 1映射EXTI_InitStructure.EXTI_LineCmd= ENABLE;//使能EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断 另一个是事件EXTI_InitStructure.EXTI_Trigger= EXTI_Trigger_Falling;//触发方式 上升沿 下降沿 上升下降沿都出触发EXTI_Init(&EXTI_InitStructure);//指定GPIO端口和引脚映射到外部中断线上//配置NVICNVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//用于配置中断优先级分组。中断优先级分组决定了中断优先级的划分方式NVIC_InitTypeDef NVIC_InitStructure; //结构体配置NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;//指定中断线NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//响应中断优先级 0-14NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//抢占中断优先级 0-14NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//开启NVIC_Init(&NVIC_InitStructure);//初始化中断控制寄存器 引脚0NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;//指定中断线NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//响应中断优先级 0-14NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;//抢占中断优先级 0-14NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//开启NVIC_Init(&NVIC_InitStructure);//初始化中断控制寄存器 引脚1
}int16_t Encoder_Get(void)
{int8_t temp;temp = Encoder_Count;Encoder_Count = 0;return temp;
}//10-15的中断处理函数 当发生中断就跳转到该函数 后要清楚中断标志位
void EXTI0_IRQHandler(void)
{ //检测是不是14引脚触发中断 SET触发中断if(EXTI_GetITStatus(EXTI_Line0) == SET){//读取该引脚电平是否拉低 0 是count++if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0) == Bit_RESET){Encoder_Count--;}EXTI_ClearITPendingBit(EXTI_Line0);}
}void EXTI1_IRQHandler(void)
{ //检测是不是14引脚触发中断 SET触发中断if(EXTI_GetITStatus(EXTI_Line1) == SET){//读取该引脚电平是否拉低 0 是count++if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == Bit_RESET){Encoder_Count++;}EXTI_ClearITPendingBit(EXTI_Line1);}
}
定时器
定时器类型
定时器时基----基本定时器
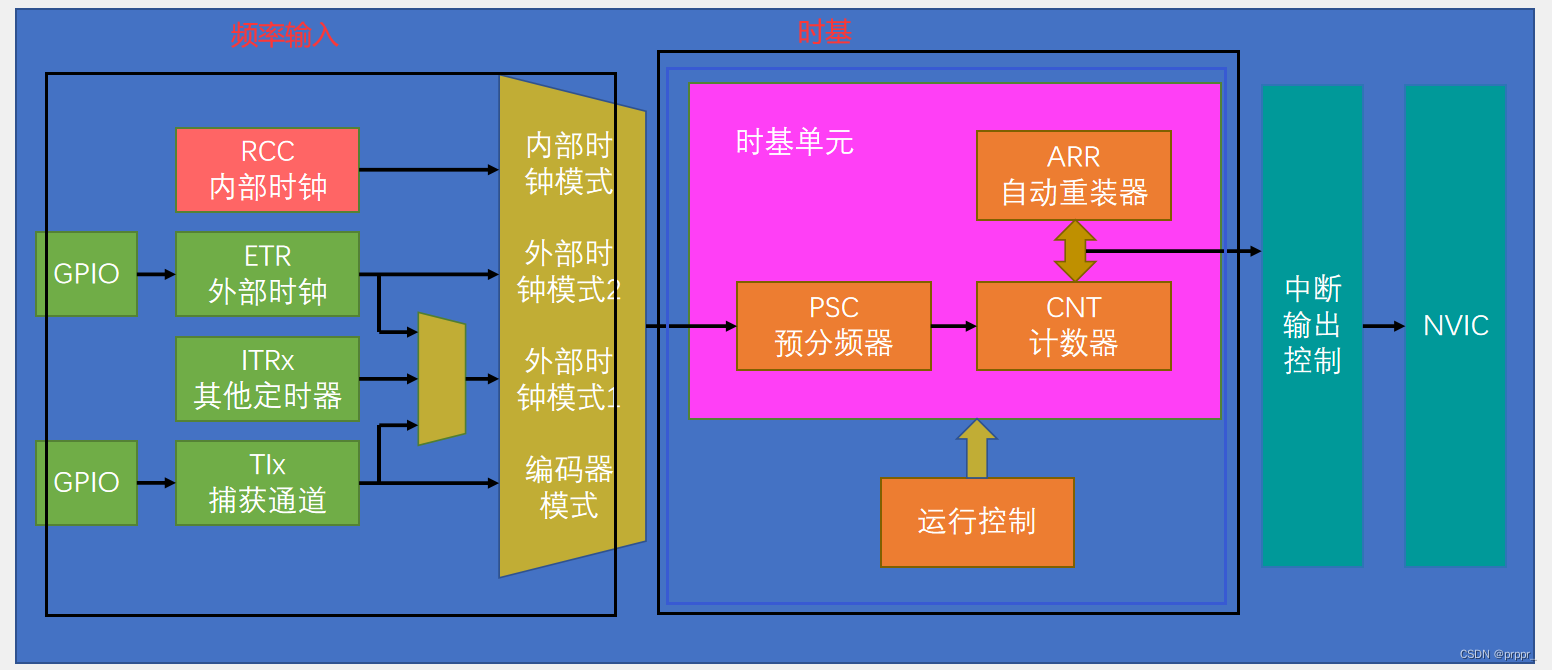
通用定时器时钟输入
 高级定时器
高级定时器

代码部分-----------------------------
配置STM32F103C8T6标准库的定时器中断需要以下步骤:
- 使能时钟。
- 配置预分频、自动重装值和重复计数值。
- 清除中断标志位(否则会先进一次中断)。
- 使能TIM中断,选择中断源。
- 设置中断优先级。
- 使能TIMx外设。
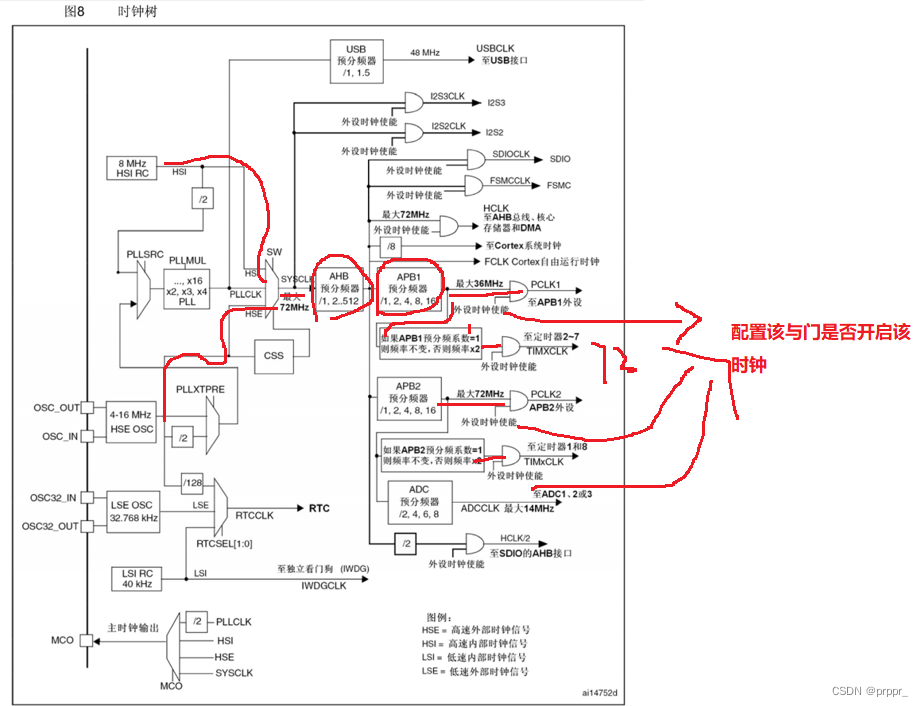
#include "stm32f10x.h" // Device headervoid Timer_Init()
{//使能时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2); //用于配置TIMx定时器的时钟源和分频值//设置预分频自动重装值和重复计数 定时时间clk_psc/psc+1/次数 72000000/7200-1/10000-1 = 1秒TIM_TimeBaseInitTypeDef TIM_TimBaseInitStructure;TIM_TimBaseInitStructure.TIM_Prescaler = 7200 - 1; //设置定时器的预分频值TIM_TimBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数模式TIM_TimBaseInitStructure.TIM_Period = 10000 - 1; //即定时器需要计数多少次才能溢出一次TIM_TimBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//置定时器的时钟分频系数为1,即不分频。TIM_TimBaseInitStructure.TIM_RepetitionCounter = 0; //设置定时器的重复计数器值为0,用于启动定时器和计算定时器溢出时间。TIM_TimeBaseInit(TIM2,&TIM_TimBaseInitStructure);//清除中断标志位TIM_ClearFlag(TIM2,TIM_FLAG_Update); //防止TIM_TimeBaseInit后就进入中断//使能TIM中断TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//设置中断优先级NVIC_InitTypeDef NVIV_InitStructure;NVIV_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//中断通道NVIV_InitStructure.NVIC_IRQChannelCmd = ENABLE;//启动中断NVIV_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//抢占优先级为2NVIV_InitStructure.NVIC_IRQChannelSubPriority = 1; //响应优先级1NVIC_Init(&NVIV_InitStructure);//中通道配置//使能TIMx外设TIM_Cmd(TIM2,ENABLE); //定时器2使能
}/*
//定时器2中断
void TIM2_IRQHandler(void)
{//判断是不是定时器2中断if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){//清楚标志位TIM_ClearITPendingBit(TIM2,TIM_IT_Update);}}
*/
定时器电灯。

/*
定时器中断点灯
*/#include "stm32f10x.h" // Device header
#include "LED.h" void Timer_Init(void)
{ //设置时钟挂在APB1时钟上 为内部时钟72MHzRCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2);//配置时基 72000000/7200/10000 = 1sTIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//几分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数TIM_TimeBaseInitStructure.TIM_Period = 10000-1;//周期TIM_TimeBaseInitStructure.TIM_Prescaler = 7200-1;//psc获取定时器的预分频系数。这个参数决定了定时器的计数频率TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//设置重复计数值 溢出增加计数 高级定时器才能用TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//设置运行控制 当指定的更新事件(通常是TIM_UpdateFlag)发生时,使能定时器的中断TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//设置中断控制分组NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断控制NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//中断通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//抢占优先级 --根据分组NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;//响应优先级NVIC_Init(&NVIC_InitStructure);//启动定时器TIM_Cmd(TIM2,ENABLE);}
void TIM2_IRQHandler(void)
{if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){LED1_Turn();TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//用于清除定时器的某个中断挂起位的状态 以便重新激活}
}
定时器 ---- PWM
概念
 原理图
原理图
 常用模式
常用模式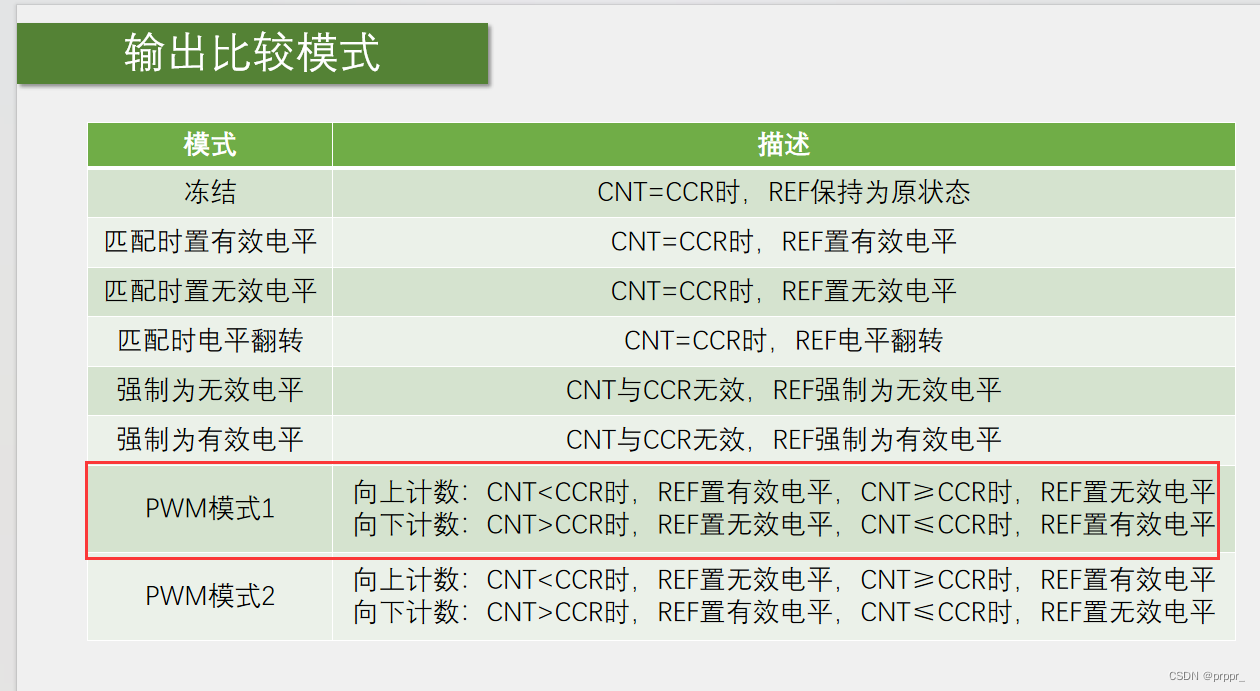
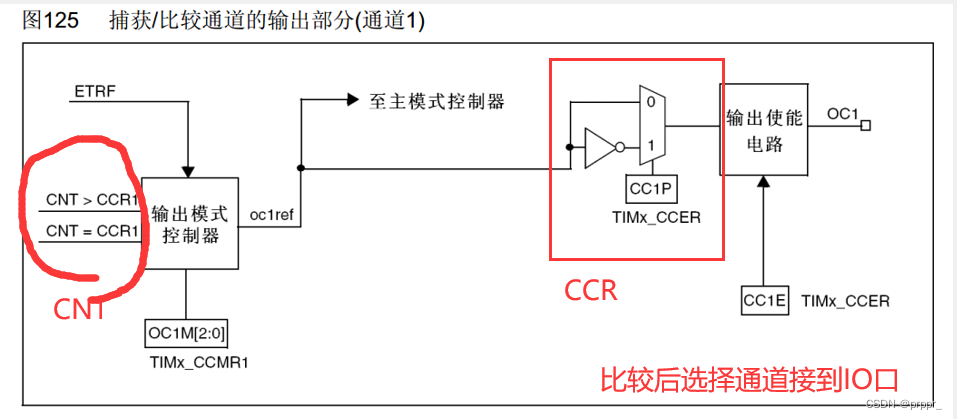
CNT和CCR以及满刻度占比
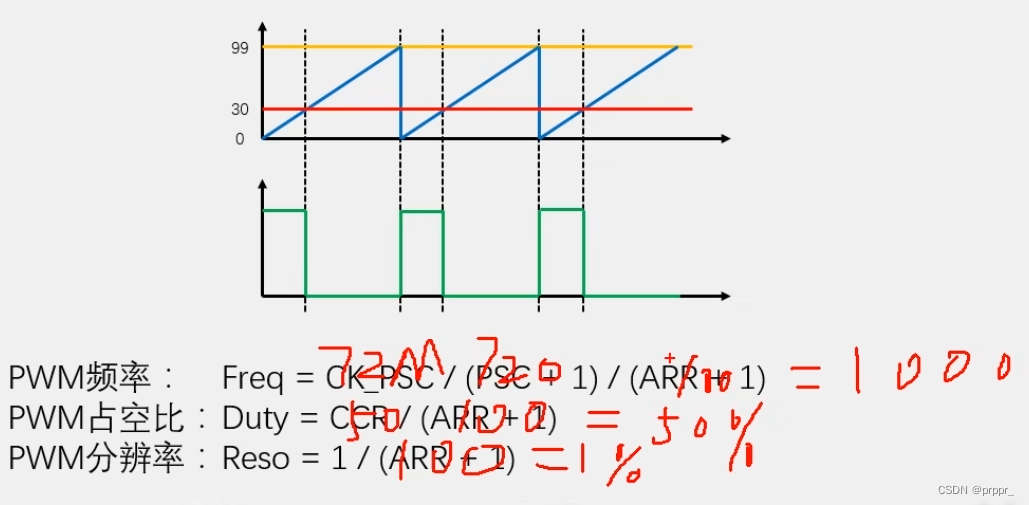
 计算公式
计算公式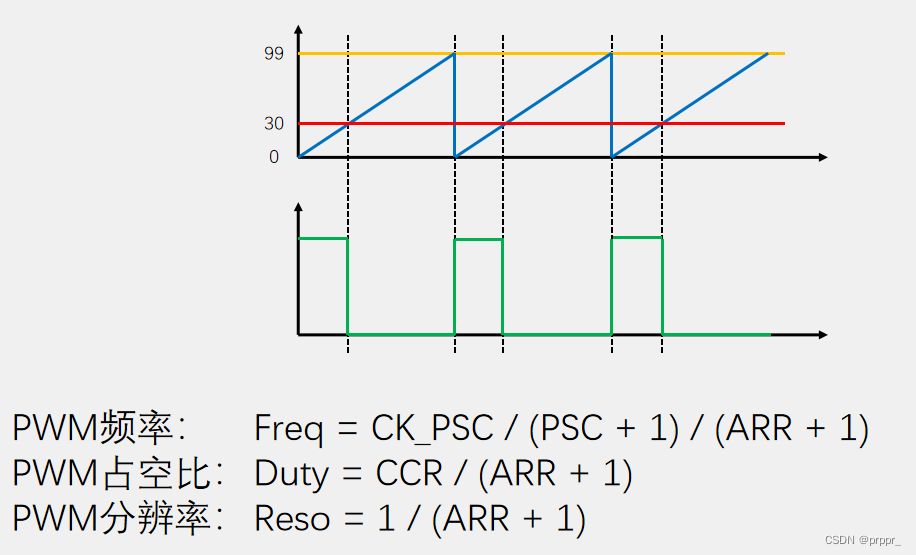
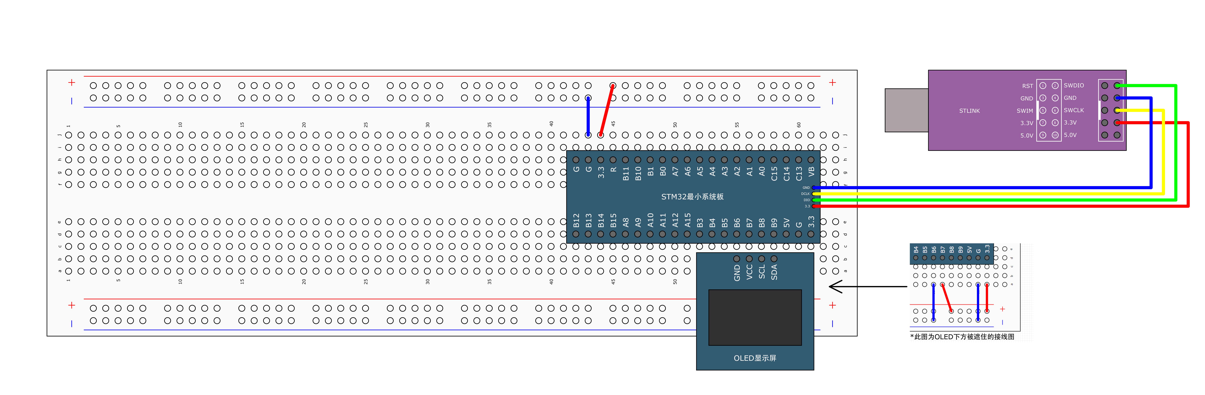
电路接线图

引脚复用 ---- 映射

计算公式
PWM控制呼吸灯 ----------------
/*
pwm.c pwm控制呼吸灯
*/
#include "stm32f10x.h" // Device headervoid PWM_Init(void)
{//1.1RCC时钟配置RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2);//2.1rcc 设置PPIOA时钟和复用口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//GPIO0配置为复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//1.2定时器时基初始化TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//不分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数TIM_TimeBaseInitStructure.TIM_Period = 100-1;//计数周期TIM_TimeBaseInitStructure.TIM_Prescaler = 720-1;//psc预分频TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//高级定时器才需要设置TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//3.1用于初始化定时器(TIM)的输出比较通道1(TIM_OC1)的功能TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//!!用于初始化定时器的输出比较通道(Output Compare Channel)结构体 防止高级定时器参数过多冲突TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置模式为PWM1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//高电平有效TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//PWM使能开启 TIM_OutputNState_EnableTIM_OCInitStructure.TIM_Pulse = 0;//占空比百分之10TIM_OC1Init(TIM2,&TIM_OCInitStructure);//定时器通道1PWM初始化//1.3启动定时器TIM_Cmd(TIM2,ENABLE);}//设置占空比 最后是1 不是L、l
void PWM_SetCompare1(uint16_t Comparel)
{TIM_SetCompare1(TIM2,Comparel);//作用是设置 PWM 输出的占空比
}/*
PWM.h
*/
#ifndef _PWM_H
#define _PWM_Hvoid PWM_Init(void);
void PWM_SetCompare1(uint16_t Comparel);#endif
/*
main
*/
#include "stm32f10x.h" // Device header
#include "Shock.h"
#include "Buzzer.h"
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
#include "LED.h"
#include "Timer.h"
#include "PWM.h"uint16_t i;int main(void)
{OLED_Init();PWM_Init();while (1){for (i = 0; i <= 100; i++){PWM_SetCompare1(i);Delay_ms(10);}for (i = 0; i <= 100; i++){PWM_SetCompare1(100 - i);Delay_ms(10);}}
}PWM控制SG90舵机----------------
使用定时器2通道2
/*
pwm.c pwm.h
*/
#include "stm32f10x.h" // Device headervoid PWM_Init(void)
{//1.1RCC时钟配置RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2);//1.2定时器时基初始化TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//不分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数TIM_TimeBaseInitStructure.TIM_Period = 20000-1;//计数周期TIM_TimeBaseInitStructure.TIM_Prescaler = 72-1;//psc预分频TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//高级定时器才需要设置TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//2.1rcc 设置PPIOA时钟和复用口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//GPIO0配置为复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //!!!第二通道对应PA1GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//3.1用于初始化定时器(TIM)的输出比较通道1(TIM_OC2)的功能TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//!!用于初始化定时器的输出比较通道(Output Compare Channel)结构体TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置模式为PWM1TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//PWM使能开启TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//高电平有效TIM_OCInitStructure.TIM_Pulse = 0;//占空比百分之10TIM_OC2Init(TIM2,&TIM_OCInitStructure);//----用的定时器2通道 共用CNT寄存器 不同通道设置不同ARR//1.3启动定时器TIM_Cmd(TIM2,ENABLE);}//设置占空比 用的定时器通道2 接的SG90
void PWM_SetCompare2(uint16_t Compare)
{TIM_SetCompare2(TIM2,Compare);//作用是设置 PWM 输出的占空比
}#ifndef _PWM_H
#define _PWM_Hvoid PWM_Init(void);
void PWM_SetCompare2(uint16_t Compare);#endif
SG90.c
/*
sg90.c
*/
#include "stm32f10x.h" // Device header
#include "PWM.h"//SG90通过PWM初始化成0度
void SG90_Init(void)
{PWM_Init();PWM_SetCompare2(500);
}//设置角度
void SG90_SetAngle(uint16_t angle)
{PWM_SetCompare2(angle/180*2000 + 500);//2500占空比 180度2500/20000
}
/*
sg90.h
*/#ifndef _SG90_H
#define _SG90_H//SG90通过PWM初始化成0度
void SG90_Init(void);
//设置角度
void SG90_SetAngle(uint16_t angle);#endif
PWM驱动电机模块
/*
pwm.c
*/#include "stm32f10x.h" // Device headervoid PWM_Init(void)
{//1.1RCC时钟配置RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2);//1.2定时器时基初始化TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//不分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数TIM_TimeBaseInitStructure.TIM_Period = 20000-1;//计数周期TIM_TimeBaseInitStructure.TIM_Prescaler = 72-1;//psc预分频TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//高级定时器才需要设置TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//2.1rcc 设置PPIOA时钟和复用口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//GPIO0配置为复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //!!!定时器第三通道对应PA2GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//3.1用于初始化定时器(TIM)的输出比较通道1(TIM_OC2)的功能TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//!!用于初始化定时器的输出比较通道(Output Compare Channel)结构体TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置模式为PWM1TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//PWM使能开启TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//高电平有效TIM_OCInitStructure.TIM_Pulse = 0;//占空比百分之10TIM_OC2Init(TIM2,&TIM_OCInitStructure);//----用的定时器2通道 共用CNT寄存器 不同通道设置不同ARR//1.3启动定时器TIM_Cmd(TIM2,ENABLE);}//设置占空比 用的定时器通道3 接的PA2 电机模块
void PWM_SetCompare3(int16_t Compare)
{TIM_SetCompare3(TIM2,Compare);//作用是设置 PWM 输出的占空比
}
![]()
/*
Motor.c 电机模块 三根线 正反转PA4 PA5 pwm接PA2定时器2通道3
*/#include "stm32f10x.h" // Device header
#include "PWM.h"//电机初始化一个接PA4 一个接PA5 一个PWM接PA2
void Motor_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入 看原理图GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5;//接电机正负级GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//电机初始化PWM_Init();}//设置电机速度、一高一低控制方向、pwm控制速度
void Motor_SetSpeed(int16_t Speed)
{if(Speed >= 0){GPIO_SetBits(GPIOA,GPIO_Pin_4);GPIO_ResetBits(GPIOA,GPIO_Pin_5);PWM_SetCompare3(Speed);}else{GPIO_ResetBits(GPIOA,GPIO_Pin_4);GPIO_SetBits(GPIOA,GPIO_Pin_5);PWM_SetCompare3(-Speed);}
}
输入捕获测频率



/*
pwm
*/
#include "stm32f10x.h" // Device headervoid PWM_Init(void)
{//1.1RCC时钟配置RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2);//2.1rcc 设置PPIOA时钟和复用口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//GPIO0配置为复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//1.2定时器时基初始化TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//不分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数TIM_TimeBaseInitStructure.TIM_Period = 100-1;//计数周期TIM_TimeBaseInitStructure.TIM_Prescaler = 720-1;//psc预分频TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//高级定时器才需要设置TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//3.1用于初始化定时器(TIM)的输出比较通道1(TIM_OC1)的功能TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//!!用于初始化定时器的输出比较通道(Output Compare Channel)结构体 防止高级定时器参数过多冲突TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置模式为PWM1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//高电平有效TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//PWM使能开启 TIM_OutputNState_EnableTIM_OCInitStructure.TIM_Pulse = 0;//占空比百分之10TIM_OC1Init(TIM2,&TIM_OCInitStructure);//定时器通道1PWM初始化//1.3启动定时器TIM_Cmd(TIM2,ENABLE);}//设置占空比 最后是1 不是L、l
void PWM_SetCompare1(uint16_t Comparel)
{TIM_SetCompare1(TIM2,Comparel);//作用是设置 PWM 输出的占空比
}//设置PWM的预分频器Perscaler
//允许在运行时修改预分频器的值,而无需重新初始化整个定时器
//参数 TIM2 预分频 TIM_PSCReloadMode_Immediate立即重装载
void PWM_SetPrescaler(uint16_t Perscaler)
{TIM_PrescalerConfig(TIM2,Perscaler,TIM_PSCReloadMode_Immediate);
}/*
ic输入捕获
*/#include "stm32f10x.h" // Device header//输入捕获
//PA0发送占空比为50 预分频720的信号到PA6 PA6设置输入捕获获取PA0的频率并显示
void IC_Init(void)
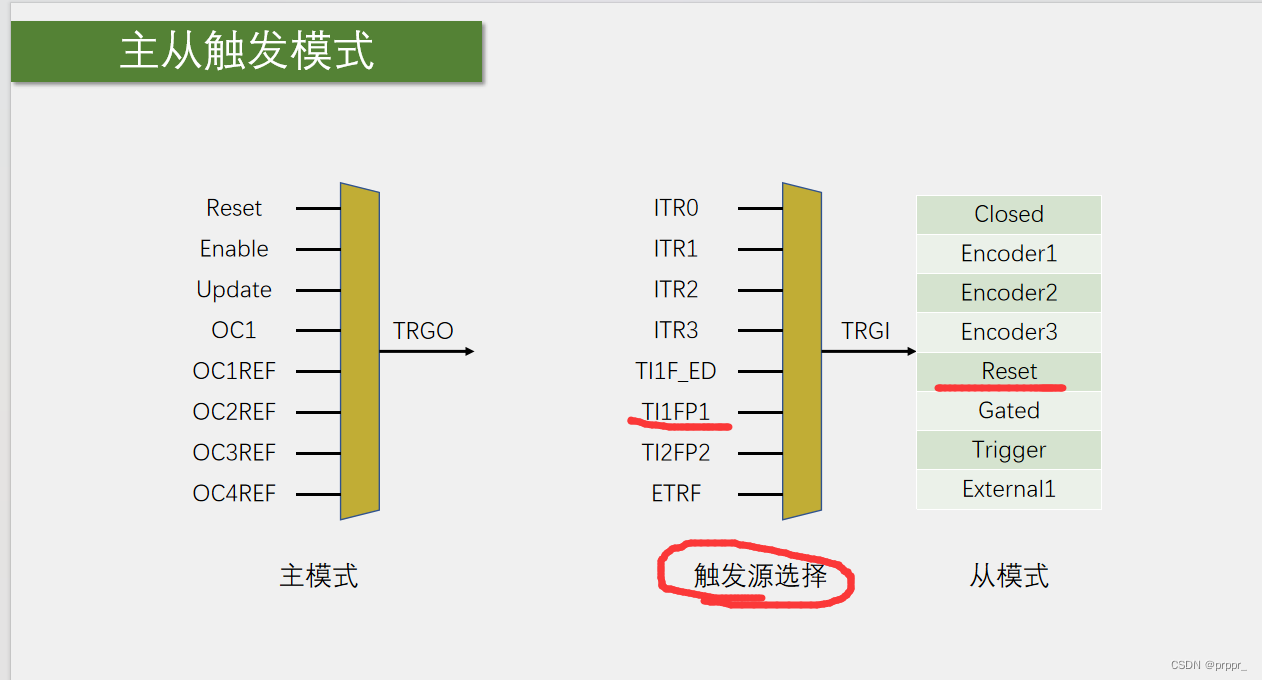
{//RCCRCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);TIM_InternalClockConfig(TIM3);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//时基TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//不分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1;//计数周期TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;//psc预分频TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//高级定时器才有TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);//GPIOGPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;//PA6GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//频率为50嘛MHzGPIO_Init(GPIOA,&GPIO_InitStructure);//输入捕获单元 用于初始化捕获通道、滤波器、捕获极性、映射关系和分频系数等参数TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//通道TIM_ICInitStructure.TIM_ICFilter = 0xF; //滤波器滤除干扰 越大越好TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;//极性 上升沿触发TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //不分频TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;//直连输入!! 交叉输入TIM_ICInit(TIM3,&TIM_ICInitStructure);//触发源 定时器3 通过TI1端(PA6)作为外部触发输入引脚的第1个边沿检测输入TIM_SelectInputTrigger(TIM3,TIM_TS_TI1FP1);//从模式用于选择定时器的从模式 复位从模式TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_Reset);//开启定时器TIM_Cmd(TIM3,ENABLE);
}//获取频率
uint32_t IC_GetFreq(void)
{//fx = fc/N return 1000000 / (TIM_GetCapture1(TIM3) + 1);//N=10000 72MHz/720 TIM_GetCapture1获取定时器3捕获通道1的值
}
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"
#include "IC.h"int main(void)
{OLED_Init();PWM_Init();IC_Init();OLED_ShowString(1,1,"Freq:00000Hz");PWM_SetPrescaler(72 - 1);//设置预分频系数 Freq = 72MHz/psc+1/ARR+1 = 10000 PSC = 72000000/(psc+1)/100PWM_SetCompare1(50);//设置占空比 Duty = CCR/100;while (1){OLED_ShowNum(1,6,IC_GetFreq(),5);}
}输入捕获测占空比

#include "stm32f10x.h" // Device headervoid PWM_Init(void)
{//1.1RCC时钟配置RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2);//2.1rcc 设置PPIOA时钟和复用口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//GPIO0配置为复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//1.2定时器时基初始化TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//不分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数TIM_TimeBaseInitStructure.TIM_Period = 100-1;//计数周期TIM_TimeBaseInitStructure.TIM_Prescaler = 720-1;//psc预分频TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//高级定时器才需要设置TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//3.1用于初始化定时器(TIM)的输出比较通道1(TIM_OC1)的功能TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//!!用于初始化定时器的输出比较通道(Output Compare Channel)结构体 防止高级定时器参数过多冲突TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置模式为PWM1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//高电平有效TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//PWM使能开启 TIM_OutputNState_EnableTIM_OCInitStructure.TIM_Pulse = 0;//占空比百分之10TIM_OC1Init(TIM2,&TIM_OCInitStructure);//定时器通道1PWM初始化//1.3启动定时器TIM_Cmd(TIM2,ENABLE);}//设置占空比 最后是1 不是L、l
void PWM_SetCompare1(uint16_t Comparel)
{TIM_SetCompare1(TIM2,Comparel);//作用是设置 PWM 输出的占空比
}//设置PWM的预分频器Perscaler
//允许在运行时修改预分频器的值,而无需重新初始化整个定时器
//参数 TIM2 预分频 TIM_PSCReloadMode_Immediate立即重装载
void PWM_SetPrescaler(uint16_t Perscaler)
{TIM_PrescalerConfig(TIM2,Perscaler,TIM_PSCReloadMode_Immediate);
}#include "stm32f10x.h" // Device header//输入捕获
//PA0发送占空比为50 预分频720的信号到PA6 PA6设置输入捕获获取PA0的频率并显示
void IC_Init(void)
{//RCCRCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);TIM_InternalClockConfig(TIM3);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//时基TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//不分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1;//计数周期TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;//psc预分频TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//高级定时器才有TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);//GPIOGPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;//PA6GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//频率为50嘛MHzGPIO_Init(GPIOA,&GPIO_InitStructure);//输入捕获单元 用于初始化捕获通道、滤波器、捕获极性、映射关系和分频系数等参数TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//通道TIM_ICInitStructure.TIM_ICFilter = 0xF; //滤波器滤除干扰 越大越好TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;//极性 上升沿触发TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //不分频TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;//直连输入!! 交叉输入TIM_PWMIConfig(TIM3,&TIM_ICInitStructure);//~~~~!!!!!配置与前面的相反 通道2 下降沿 不分频 交叉输入TIM_ICInit(TIM3,&TIM_ICInitStructure);//触发源 定时器3 通过TI1端(PA6)作为外部触发输入引脚的第1个边沿检测输入TIM_SelectInputTrigger(TIM3,TIM_TS_TI1FP1);//从模式用于选择定时器的从模式 复位从模式TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_Reset);//开启定时器TIM_Cmd(TIM3,ENABLE);
}//获取频率 两个一样的标准72频率 占周期N的分之一
uint32_t IC_GetFreq(void)
{//fx = fc/N 一格/N格 即周期分之一 就是频率return 1000000 / (TIM_GetCapture1(TIM3) + 1);//N=100000 72MHz/720 TIM_GetCapture1获取定时器3捕获通道1的值
} //TIM_GetCapture1捕获的是计数器的值。当定时器溢出时,计数器的值会被自动重置为0//获取占空比
uint32_t IC_GetDuty(void)
{//获取通道2的N的次数单次 总的次数放在通道1中计数 return (TIM_GetCapture2(TIM3) * 100) / (TIM_GetCapture1(TIM3) + 1);
}
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"
#include "IC.h"int main(void)
{OLED_Init();PWM_Init();IC_Init();OLED_ShowString(1,1,"Freq:00000Hz");OLED_ShowString(2,1,"Duty:00%");PWM_SetPrescaler(7200 - 1);//设置预分频系数 Freq = 72MHz/psc+1/ARR+1 = 10000 PSC = 72000000/(psc+1)/100PWM_SetCompare1(80);//设置占空比 Duty = CCR/100;while (1){OLED_ShowNum(1,6,IC_GetFreq(),5);OLED_ShowNum(2,6,IC_GetDuty(),2);}
}输入捕获编码器计数


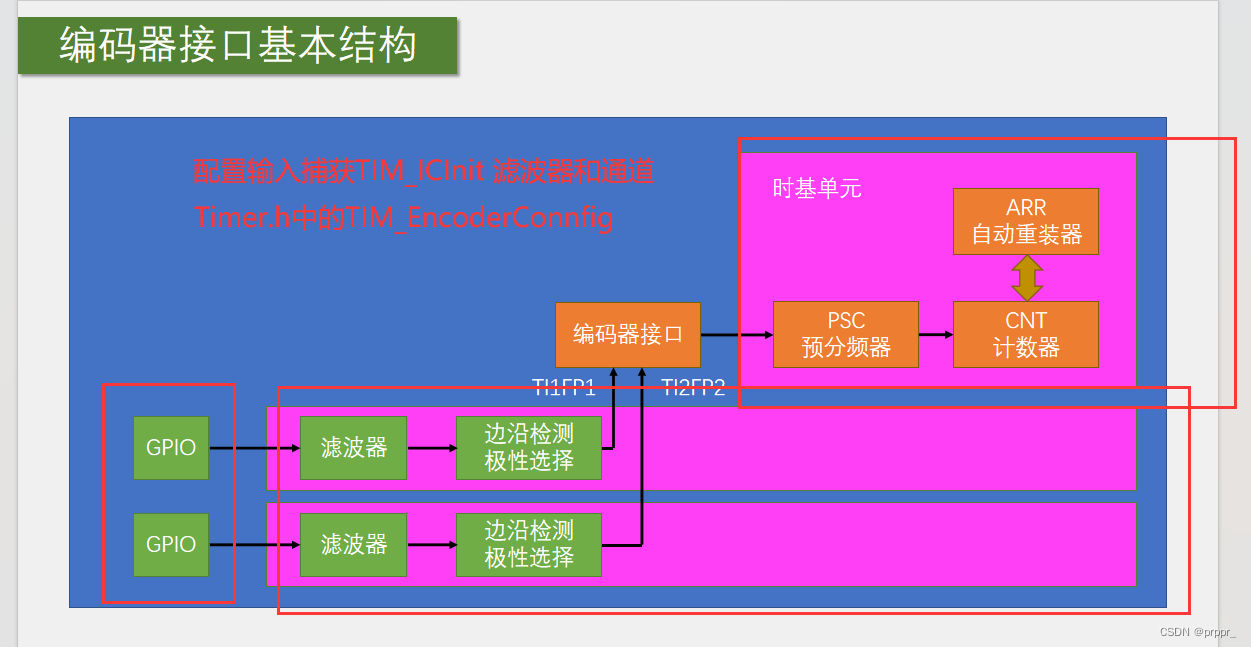
TIM_EncoderInterfaceConfig 是一个用于配置定时器编码器接口参数的函数。这个函数通常在STM32微控制器编程中使用,用于设置定时器的编码器模式、分辨率等参数。
函数原型:
c复制代码
void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t EncoderMode, uint16_t IC1Filter, uint16_t IC1Polarity, uint16_t IC1Selection, uint16_t IC2Filter, uint16_t IC2Polarity, uint16_t IC2Selection);参数:
- TIMx:定时器模块的实例,可以是 TIM2、TIM3、TIM4、TIM5 等。
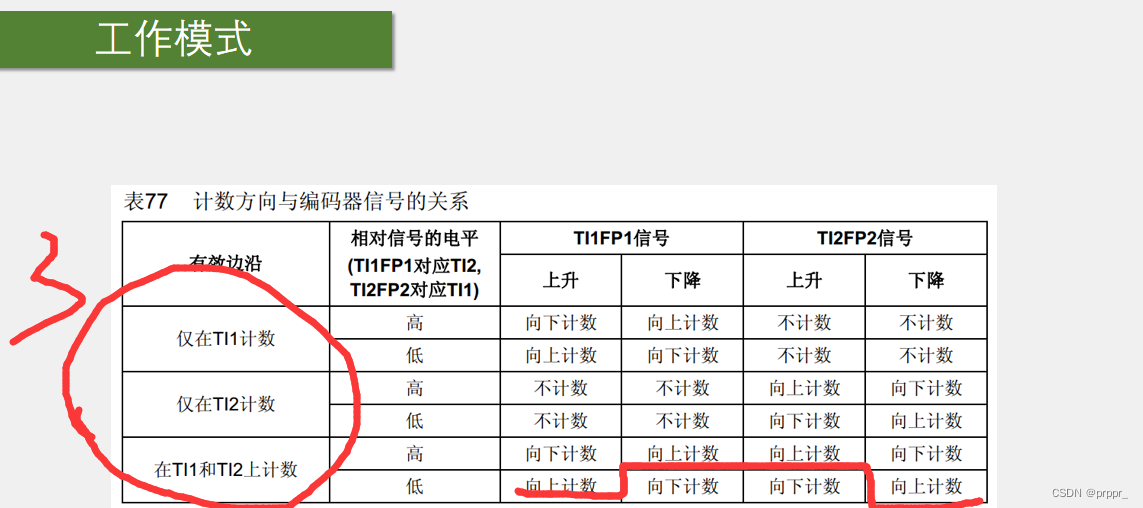
- EncoderMode:编码器模式,可以是 TIM_EncoderMode_TI12、TIM_EncoderMode_TI1、TIM_EncoderMode_TI2 或 TIM_EncoderMode_TI4。
- IC1Filter:输入滤波器1的值,用于设置输入信号的滤波程度。
- IC1Polarity:输入极性1的值,用于设置输入信号的极性。
- IC1Selection:输入选择1的值,用于选择输入通道。
- IC2Filter:输入滤波器2的值,用于设置输入信号的滤波程度。
- IC2Polarity:输入极性2的值,用于设置输入信号的极性。
- IC2Selection:输入选择2的值,用于选择输入通道。
#include "stm32f10x.h" // Device header//编码器配置
void Encoder_Init(void)
{//RCC时钟配置RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);TIM_InternalClockConfig(TIM3);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//时基 使用定时器3 因为定时器2到普通时钟了TIM_TimeBaseInitTypeDef TIM_TimeBaseIniitStructure;TIM_TimeBaseIniitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//预分频因子 不分频TIM_TimeBaseIniitStructure.TIM_CounterMode = TIM_CounterMode_Up;//定时器模式为向上计数TIM_TimeBaseIniitStructure.TIM_Period = 65536-1;//计数周期为16为寄存器挤满65536TIM_TimeBaseIniitStructure.TIM_Prescaler = 1-1;//不分频TIM_TimeBaseIniitStructure.TIM_RepetitionCounter = 0;//高级定时器才有TIM_TimeBaseInit(TIM3,&TIM_TimeBaseIniitStructure);//GPIO初始化配置GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//引脚模式为上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//PWM输入捕获配置TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICStructInit(&TIM_ICInitStructure);//参数过多没有配置 放入结构体中防止冲突TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//输入捕获 定时器通道1TIM_ICInitStructure.TIM_ICFilter = 0xF;//滤波器越大越好TIM_ICInit(TIM3,&TIM_ICInitStructure);//配置完输入捕获通道1 写入寄存器中TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;//输入捕获 定时器通道2TIM_ICInitStructure.TIM_ICFilter = 0xF;//滤波器越大越好TIM_ICInit(TIM3,&TIM_ICInitStructure);//配置完输入捕获通道2 写入寄存器中//Encoder配置 里面极性TIM_ICPolarity_Rising 会覆盖输入捕获中的极性 必须在后面 前面极性可省略TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);//开启时钟TIM_Cmd(TIM3,ENABLE);}//获取count值
int16_t Encoder_Get(void)
{int16_t Temp;Temp = TIM_GetCounter(TIM3);//用于获取定时器计数器的函数TIM_SetCounter(TIM3,0); //用于设置定时器计数器的函数return Temp;
}
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"
#include "Timer.h"
#include "Encoder.h"int16_t Speed;int main(void)
{OLED_Init();PWM_Init();Encoder_Init();Timer_Init();OLED_ShowString(1,1,"Speed:");while (1){OLED_ShowSignedNum(1,7,Speed,5);}
}void TIM2_IRQHandler(void)//每秒钟获取以下speed速度
{if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){Speed = Encoder_Get();TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//用于清除定时器的某个中断挂起位的状态 以便重新激活}
}/*
定时器
*/
#include "stm32f10x.h" // Device header
#include "LED.h" void Timer_Init(void)
{ //设置时钟挂在APB1时钟上 为内部时钟72MHzRCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2);//配置时基 72000000/7200/10000 = 1sTIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//几分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数TIM_TimeBaseInitStructure.TIM_Period = 10000-1;//周期TIM_TimeBaseInitStructure.TIM_Prescaler = 7200-1;//psc获取定时器的预分频系数。这个参数决定了定时器的计数频率TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//设置重复计数值 溢出增加计数 高级定时器才能用TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//设置运行控制 当指定的更新事件(通常是TIM_UpdateFlag)发生时,使能定时器的中断TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//设置中断控制分组NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断控制NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//中断通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//抢占优先级 --根据分组NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;//响应优先级NVIC_Init(&NVIC_InitStructure);//启动定时器TIM_Cmd(TIM2,ENABLE);}
//void TIM2_IRQHandler(void) 是否在主函数中调用了
//{
// if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET)
// {
// LED1_Turn();
// TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//用于清除定时器的某个中断挂起位的状态 以便重新激活
// }
//}
相关文章:
STM32 ---- 再次学习STM32F103C8T6/STM32F409IGT6
目录 一、环境搭建及介绍 关于STM32基础介绍 新建工程 外设案例 LED流水灯 蜂鸣器 上拉电阻和下拉电阻知识 电压比较器 c语言基础知识 类型、结构体、枚举 类型int8_t int16_t int32_t 宏替换 #define 和typedef用法 结构体两种填充方法 和 命名规则 枚举用法 常用…...

UE4 EQS环境查询 学习笔记
EQS环境查询对应Actor的范围 EQS环境查询查询对应的类 查询到即有一个蓝色的球在Actor上,里面有位置信息等等 在行为树运行EQS,按键(‘)可以看到Player的位置已经被标记 运行对应的EQS在这里放如EQS就可以了 Generated Point&…...

计算机算法分析与设计(11)---贪心算法(活动安排问题和背包问题)
文章目录 一、贪心算法概述二、活动安排问题2.1 问题概述2.2 代码编写 三、背包问题3.1 问题描述3.2 代码编写 一、贪心算法概述 1. 贪心算法的定义:贪心算法是指在对问题求解时,总是做出在当前看来是最好的选择。也就是说,不从整体最优上加以…...

shell命令以及运行原理
Linux严格意义上说的是一个操作系统,我们称之为“核心(kernel)“ ,但我们一般用户,不能直接使用kernel。 而是通过kernel的“外壳”程序,也就是所谓的shell,来与kernel沟通。如何理解&a…...
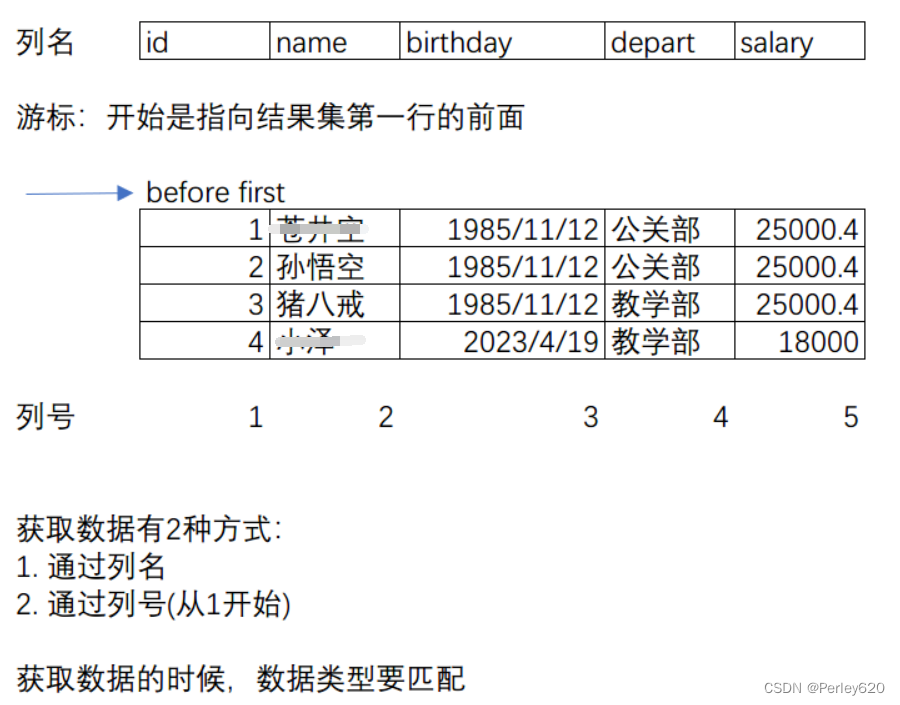
MySQL进阶(再论JDBC)——JDBC编程思想的分析 JDBC的规范架构 JDBC相关的类分析
前言 SQL(Structured Query Language)是一种用于管理关系型数据库的标准化语言,它用于定义、操作和管理数据库中的数据。SQL是一种通用的语言,可以用于多种关系型数据库管理系统(RDBMS),如MySQ…...

rabbitMQ的知识点
RabbitMQ是一种消息队列软件,它实现了高度可靠的消息传递机制。RabbitMQ支持多种消息协议,包括AMQP、STOMP、MQTT等,比较灵活。以下是一些rabbitmq的知识点: 1. 消息队列:消息队列是一种分布式系统中广泛使用的通信模…...

EtherNet/IP 库卡机器人和EtherCAT倍福PLC总线协议连接案例
EtherNet/IP 是一种适合于工业环境和对时间要求比较苛刻的应用的网络。而远创智控YC-EIPM-ECT通讯网关,是一款自主研发的EtherNet/IP 从站功能的通讯网关。它不仅可以实现EtherNet/IP 和EtherCAT的无缝连接,还可以将EtherNet/IP 作为从站连接到EtherCAT总…...

微信小程序 uniapp+vue线上洗衣店业务管理系统演89iu2
本课题意在设计一种系统的、基于用户体验的线上洗衣服务模式,具有如下的研究意义: (1)为用户提供更简单、便捷的洗衣服务模式; (2)为智能柜的盈利模式提供了新的方向; (3)通过线上系统、智能柜与洗衣工厂结合的方式,为洗衣企业构建了一套节 省人力成本的…...

Maven项目,进行编译,使用idea的 编译功能,就是正常的,但是在终端中执行 mvn clean compile 报错
一、背景: Maven项目,进行编译,使用idea的 编译功能,就是正常的,但是在终端中执行 mvn clean compile 报错 报错信息: [ERROR] Failed to execute goal org.apache.maven.plugins:maven-compiler-plugin…...
mssql还原数据库失败
标题: Microsoft SQL Server Management Studio ------------------------------ 服务器 "192.168.31.132" 的 附加数据库 失败。 (Microsoft.SqlServer.Smo) 有关帮助信息,请单击: https://go.microsoft.com/fwlink?ProdNameMicrosoftSQLServer&…...

Linux多线程编程- 无名信号量
简介 无名信号量(在 POSIX 环境下通常指 sem_t 类型的信号量)是用于同步和互斥的原语,它允许线程和进程按照预期的顺序执行,并确保对共享资源的安全访问。无名信号量与命名信号量的主要区别在于它们的可见性和生命周期。无名信号…...
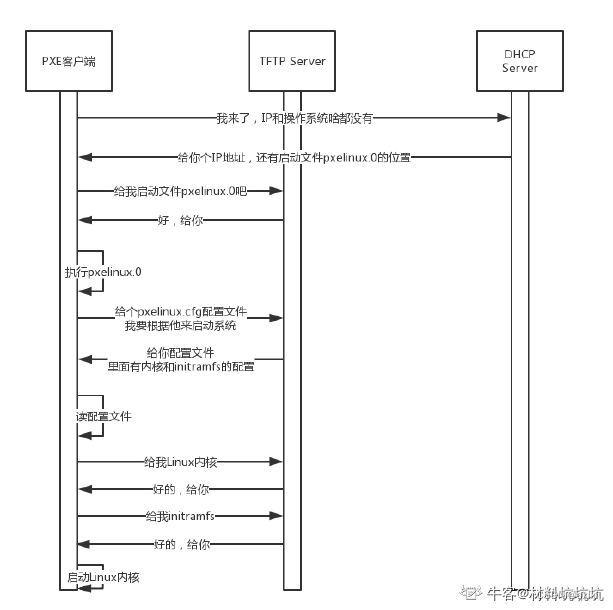
【网络协议】聊聊DHCP和PXE 工作原理
DHCP 动态主机配置协议 对于每个主机来说,只要连接了网络,那么就会配置一个IP地址,那么这个IP地址,如果是手动配置的话,对于公司内部的人员来说都要找IT进行配置,这个太浪费人力物力了,所以解决…...

发现国内优秀的团队协作软件,帮助提高工作效率
中国有许多优秀的团队协作软件,它们在企业和组织中发挥着重要作用。 以下是一些最受欢迎的团队协作软件: 1、钉钉(DingTalk): 这是一款由阿里巴巴推出的企业级协作工具,旨在帮助企业和组织实现高效沟通和协作。钉钉提…...

LeetCode 面试题 08.12. 八皇后
文章目录 一、题目二、C# 题解 一、题目 设计一种算法,打印 N 皇后在 N N 棋盘上的各种摆法,其中每个皇后都不同行、不同列,也不在对角线上。这里的“对角线”指的是所有的对角线,不只是平分整个棋盘的那两条对角线。 注意&#…...
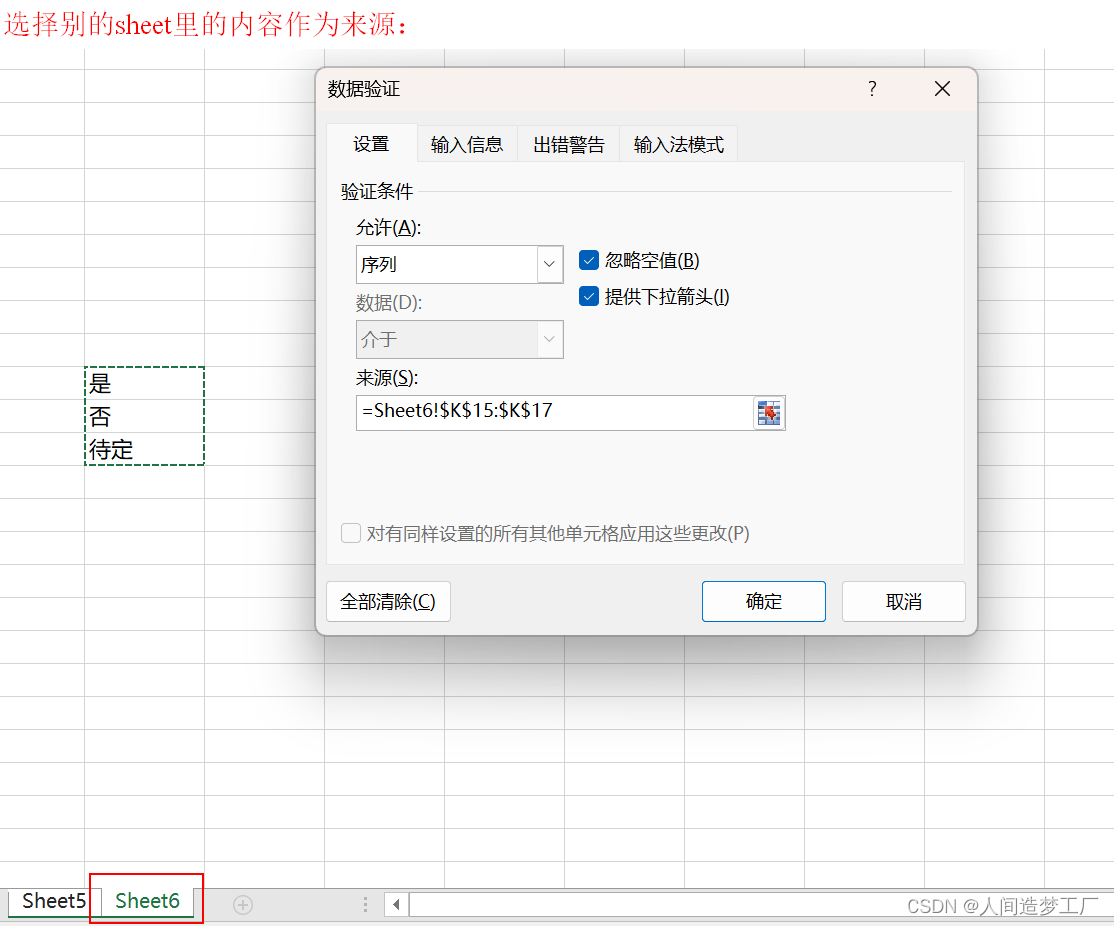
Excel 的下拉列表
可以将 Sheet6 隐藏,就更好地隐藏了来源。...

基于Effect的组件设计 | 京东云技术团队
Effect的概念起源 从输入输出的角度理解Effect https://link.excalidraw.com/p/readonly/KXAy7d2DlnkM8X1yps6L 编程中的Effect起源于函数式编程中纯函数的概念 纯函数是指在相同的输入下,总是产生相同的输出,并且没有任何副作用(side effect)的函数。…...

541. 反转字符串 II
541. 反转字符串 II class Solution { public:void Reverse(string& s, int start, int end){end--;while (start < end){swap(s[start], s[end]);start;end--;}}string reverseStr(string s, int k){int len s.size();for (int i 0; i < len; i 2 * k){if (i …...
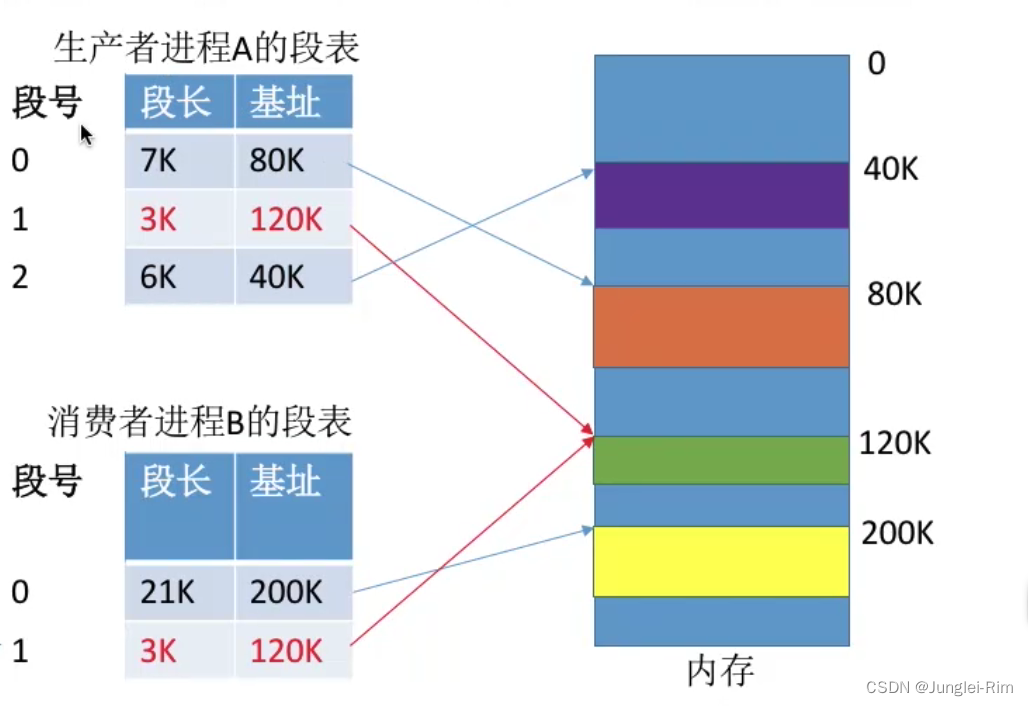
基本分段存储管理方式(分段,段表,地址转换以及与分页管理对比)
1.分段 1.进程的地址空间: 按照程序自身的逻辑关系划分为若干个段,每个段都有一个段名 (在低级语言中,程序员使用段名来编程),每段从0开始编址. 2.内存分配规则: 以段为单位进行分配,每个段在内存中占据…...
哪个牌子的洗地机好用?2023洗地机推荐
洗地机作为一款高效的清洁家电能轻松的搞定各种干湿垃圾,满足日常生活中的各种地面清洁需求,越来越受大众的青睐,那么我们如何快速的选择一款适合自己无线洗地机呢?一起来看看! 做推荐之前,先给大家科普选购洗地机的时候应该关注…...
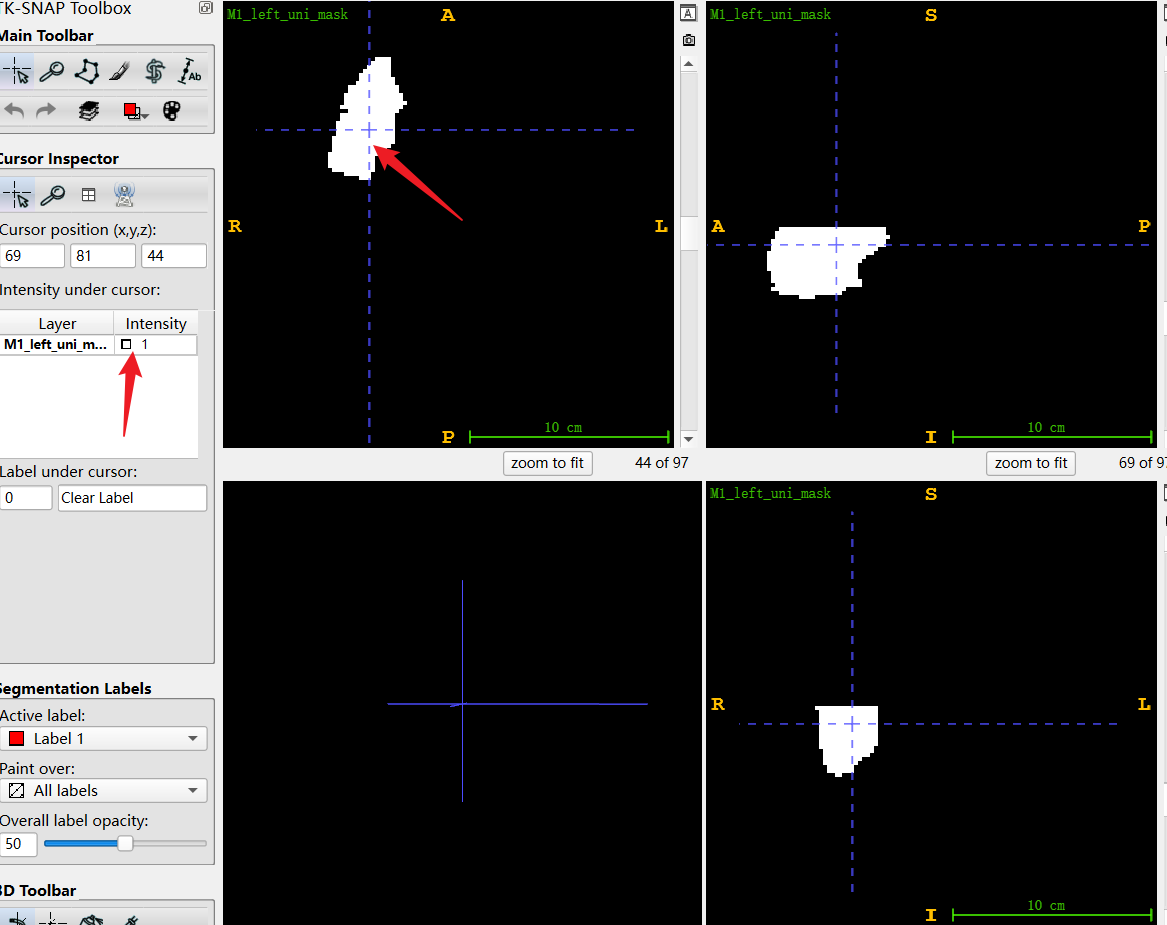
根据脑图谱获取感兴趣区域的mask
根据脑图谱获取感兴趣区域的mask 1,引入1.1 ASPECT-Atlas 2,获取脑图谱感兴趣区域mask参考: 1,引入 脑影像分析中,我们常常会针对性的对某些感兴趣区域进行分析,而对它们进行分析的前提是获取该区域的mask…...

电脑插入多块移动硬盘后经常出现卡顿和蓝屏
当电脑在插入多块移动硬盘后频繁出现卡顿和蓝屏问题时,可能涉及硬件资源冲突、驱动兼容性、供电不足或系统设置等多方面原因。以下是逐步排查和解决方案: 1. 检查电源供电问题 问题原因:多块移动硬盘同时运行可能导致USB接口供电不足&#x…...
STM32标准库-DMA直接存储器存取
文章目录 一、DMA1.1简介1.2存储器映像1.3DMA框图1.4DMA基本结构1.5DMA请求1.6数据宽度与对齐1.7数据转运DMA1.8ADC扫描模式DMA 二、数据转运DMA2.1接线图2.2代码2.3相关API 一、DMA 1.1简介 DMA(Direct Memory Access)直接存储器存取 DMA可以提供外设…...
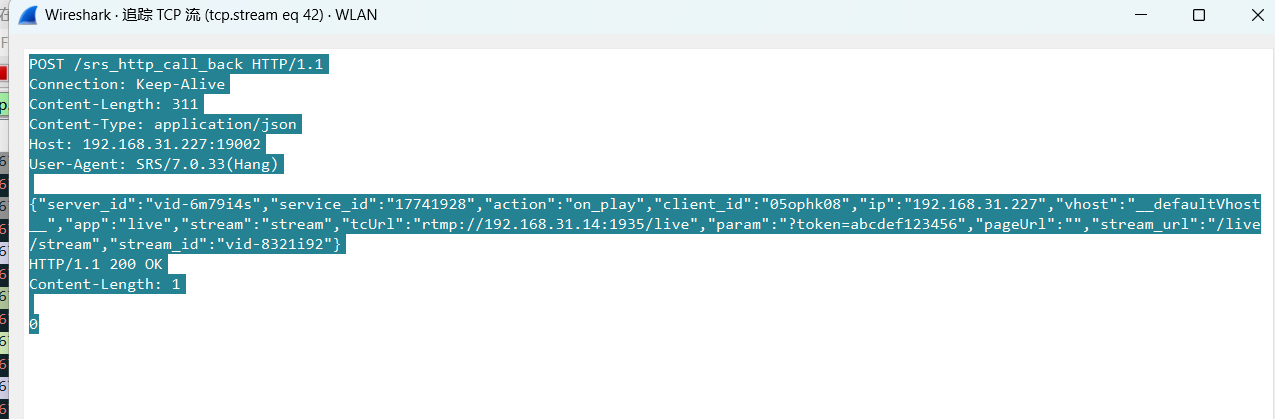
srs linux
下载编译运行 git clone https:///ossrs/srs.git ./configure --h265on make 编译完成后即可启动SRS # 启动 ./objs/srs -c conf/srs.conf # 查看日志 tail -n 30 -f ./objs/srs.log 开放端口 默认RTMP接收推流端口是1935,SRS管理页面端口是8080,可…...

【算法训练营Day07】字符串part1
文章目录 反转字符串反转字符串II替换数字 反转字符串 题目链接:344. 反转字符串 双指针法,两个指针的元素直接调转即可 class Solution {public void reverseString(char[] s) {int head 0;int end s.length - 1;while(head < end) {char temp …...
:爬虫完整流程)
Python爬虫(二):爬虫完整流程
爬虫完整流程详解(7大核心步骤实战技巧) 一、爬虫完整工作流程 以下是爬虫开发的完整流程,我将结合具体技术点和实战经验展开说明: 1. 目标分析与前期准备 网站技术分析: 使用浏览器开发者工具(F12&…...

高危文件识别的常用算法:原理、应用与企业场景
高危文件识别的常用算法:原理、应用与企业场景 高危文件识别旨在检测可能导致安全威胁的文件,如包含恶意代码、敏感数据或欺诈内容的文档,在企业协同办公环境中(如Teams、Google Workspace)尤为重要。结合大模型技术&…...
ardupilot 开发环境eclipse 中import 缺少C++
目录 文章目录 目录摘要1.修复过程摘要 本节主要解决ardupilot 开发环境eclipse 中import 缺少C++,无法导入ardupilot代码,会引起查看不方便的问题。如下图所示 1.修复过程 0.安装ubuntu 软件中自带的eclipse 1.打开eclipse—Help—install new software 2.在 Work with中…...

2023赣州旅游投资集团
单选题 1.“不登高山,不知天之高也;不临深溪,不知地之厚也。”这句话说明_____。 A、人的意识具有创造性 B、人的认识是独立于实践之外的 C、实践在认识过程中具有决定作用 D、人的一切知识都是从直接经验中获得的 参考答案: C 本题解…...
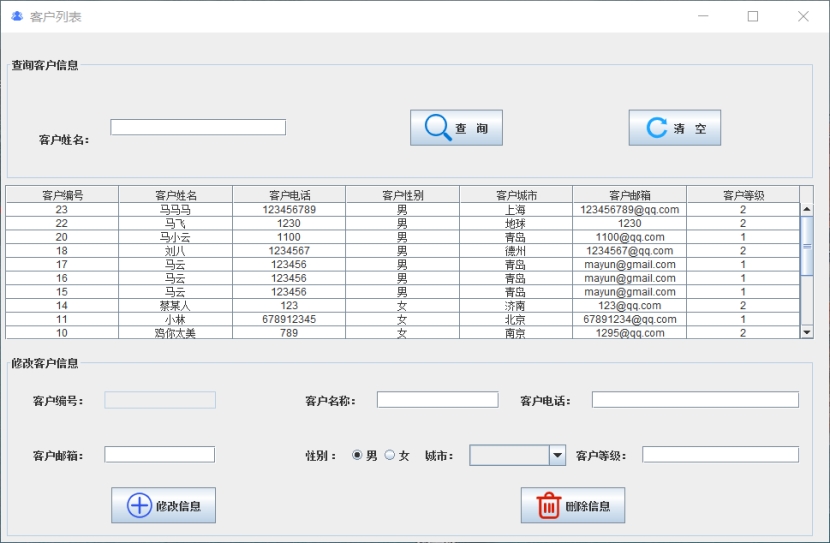
基于Java+MySQL实现(GUI)客户管理系统
客户资料管理系统的设计与实现 第一章 需求分析 1.1 需求总体介绍 本项目为了方便维护客户信息为了方便维护客户信息,对客户进行统一管理,可以把所有客户信息录入系统,进行维护和统计功能。可通过文件的方式保存相关录入数据,对…...

Redis:现代应用开发的高效内存数据存储利器
一、Redis的起源与发展 Redis最初由意大利程序员Salvatore Sanfilippo在2009年开发,其初衷是为了满足他自己的一个项目需求,即需要一个高性能的键值存储系统来解决传统数据库在高并发场景下的性能瓶颈。随着项目的开源,Redis凭借其简单易用、…...