Unity Avatar Camera Controller 第一、第三人称相机控制
文章目录
- 简介
- Variables
- 实现
- Target Position
- Target Rotation
- Others
简介
本文介绍如何实现用于Avatar角色的相机控制脚本,支持第一人称、第三人称以及两种模式之间的切换,工具已上传至SKFramework框架的Package Manager中:


Variables
Avatar:相机跟随的Avatar角色;Control Mode:控制模式 第一人称/第三人称;Mode Change Key:切换第一/第三人称模式的快捷键,若不支持切换设为None即可;

Forward Align With Avatar:视角前方是否与Avatar对齐,为flase时表示视角可以在水平方向旋转;

Horizontal Sensitivity:水平方向旋转的灵敏度;Vertical Sensitivity:垂直方向旋转的灵敏度;Rot Y Min Limit:垂直方向上旋转最小值限制;Rot Y Max Limit:垂直方向上旋转最大值限制;Rotation Lerp Time:插值到目标旋转值所需的时间;Height:相机与Avatar角色的高度差;Distance:相机与Avatar角色的默认距离;Min Distance Limit:相机距人物最小距离限制;Max Distance Limit:相机距人物最大距离限制;fpmDistance:第一人称模式所用的固定距离(第一人称时距离固定);scollSensitivity:鼠标滚轮的灵敏度(第三人称时可滚动距离);

Invert Scroll Direction:反转鼠标滚轮滚动的反向;Horizontal Offset:与Avatar在水平方向上的偏移值(仅在Forward Align With Avatar为true时开启使用,可以让Avatar在视野中偏左或偏右);

Obstacle Layer:用于避障检测的Layer层级
如下例所示,将场景中障碍物体的Layer设为Obstacle

避障检测时检测该层级:

Ctrl Avatar Rot When FP Mode:是否在第一人称模式下旋转视角时,同步旋转Avatar角色的朝向;

实现
Target Position
影响相机坐标的元素包括Avatar与相机的距离(Distance)、Avatar与相机的高度差(Height)、目标旋转值、水平方向上的偏移量(Horizontal Offset)及避障检测的影响。
- Avatar与相机的距离:第三人称模式下通过鼠标滚轮控制,并通过最大最小值进行钳制,第一人称模式下使用固定值,代码如下:
//鼠标滚轮滚动改变距离
distance -= Input.GetAxis("Mouse ScrollWheel") * Time.deltaTime * 100f * scollSensitivity * (invertScrollDirection ? -1f : 1f);
//距离钳制
distance = Mathf.Clamp(distance, minDistanceLimit, maxDistanceLimit);
//插值方式计算距离
targetDistance = controlMode == ControlMode.ThirdPersonControl? Mathf.Lerp(targetDistance, distance, Time.deltaTime * scollSensitivity): fpmDistance;
- 调用避障检测之前,目标坐标值等于Avatar角色的坐标加上Height高度,加上Distance距离,并乘上目标旋转值,代码如下:
//目标坐标值
Vector3 targetPosition = targetRotation * Vector3.forward * -targetDistance + avatar.position + Vector3.up * height;
- 避障检测,通过
SphereCast球形物理检测,检测碰撞点并向前移动:
//避障检测
private Vector3 ObstacleAvoidance(Vector3 current, Vector3 target, float radius, float maxDistance)
{Ray ray = new Ray(target, current - target);if (Physics.SphereCast(ray, radius, out RaycastHit hit, maxDistance, obstacleLayer)){return ray.GetPoint(hit.distance - radius * 2f);}return current;
}
- 最终加上水平方向上偏移量的影响:
//避障
targetPosition = ObstacleAvoidance(targetPosition, avatar.position + Vector3.up * height, .1f, distance);
transform.position = targetPosition + Vector3.left * horizontalOffset;
Target Rotation
- 获取水平及垂直方向上的输入值,让旋转x、y值自增/自减,并通过最大最小值限制垂直方向上的取值范围:
//检测鼠标右键按下
if (Input.GetMouseButton(1))
{horizontal = forwardAlignWithAvatar ? 0f : Input.GetAxis("Mouse X") * Time.deltaTime * 100f * horizontalSensitivity;vertical = Input.GetAxis("Mouse Y") * Time.deltaTime * 100f * verticalSensitivity;rotX += horizontal;rotY -= vertical;//钳制旋转y值角度rotY = Mathf.Clamp(rotY, rotYMinLimit, rotYMaxLimit);
}
- 加入插值运算,实现平滑旋转:
//目标旋转值
Quaternion targetRotation = Quaternion.Euler(rotY, rotX, 0f);
//旋转值插值率
float rotationLerpPct = 1f - Mathf.Exp(Mathf.Log(1f - .99f) / rotationLerpTime * Time.deltaTime);
//插值方式计算旋转值
targetRotation = Quaternion.Lerp(transform.rotation, targetRotation, rotationLerpPct);
- 第一人称模式时,相机视角旋转的同时控制Avatar角色的旋转:
transform.rotation = targetRotation;//第一人称控制模式 相机视角旋转的同时控制Avatar角色的旋转
if (controlMode == ControlMode.FirstPersonControl && ctrlAvatarRotWhenFPMode)
{Vector3 euler = Vector3.zero;//只取相机的RotYeuler.y = targetRotation.eulerAngles.y;avatar.rotation = Quaternion.Euler(euler);
}
Others
- 切换控制模式:
if (Input.GetKeyDown(modeChangeKey))
{controlMode = controlMode == ControlMode.FirstPersonControl? ControlMode.ThirdPersonControl: ControlMode.FirstPersonControl;
}
- 相机控制代码需写在
MonoBehaviour生命周期函数LateUpdate中,确保Avatar角色运动完成后,相机再进行跟随。
相关文章:
Unity Avatar Camera Controller 第一、第三人称相机控制
文章目录简介Variables实现Target PositionTarget RotationOthers简介 本文介绍如何实现用于Avatar角色的相机控制脚本,支持第一人称、第三人称以及两种模式之间的切换,工具已上传至SKFramework框架的Package Manager中: Variables Avatar&…...
SRE中 的SLO,SLI等知识 归纳
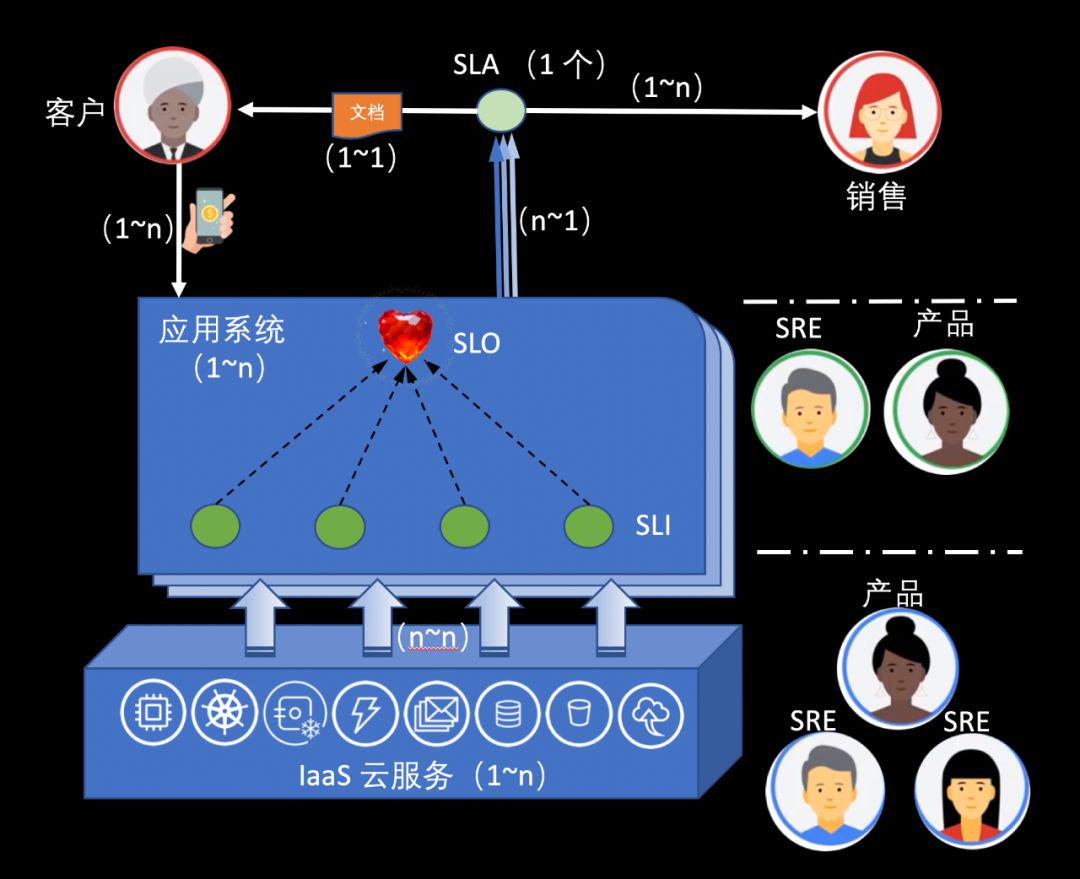
SLA Service Level Agreement 服务质量/水平协议SLO Service Level Objective 服务质量/水平目标SLI Services Level Indicator 服务质量/水平指标下面用人、事、物的逻辑进行阐释。人和事用从上到下,从左到右的顺序。客户 - 每 1 个客户在使用产品服务时&…...
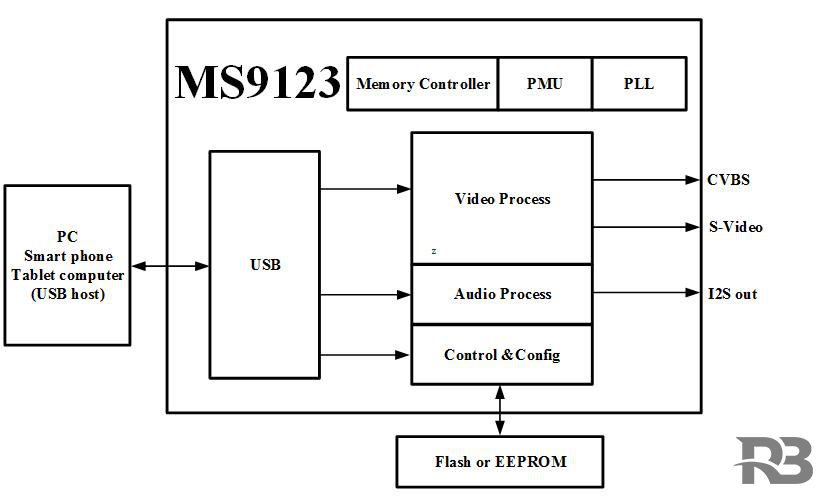
MS9123是一款单芯片USB投屏器,内部集成了USB2 0控制器和数据收发模块、视频DAC和音视频处理模块,MS9123可以通过USB接口显示或者扩展PC、
MS9123是一款单芯片USB投屏器,内部集成了USB2.0控制器和数据收发模块、视频DAC和音视频处理模块,MS9123可以通过USB接口显示或者扩展PC、智能手机、平板电脑的显示信息到更大尺寸的显示设备上,支持CVBS、S-Video视频接口。 主要功能特征 C…...

针孔成像模型零基础入门(三)
2020年爆火的Nerf(神经辐射场)横空出世,据说只要用手机拍照,然后喂给模型,就可以生成3D模型了,我试过了,确有此事! 那我们有想过,为什么可以从二维的图片里面获取物体三…...

你真的了解环形队列吗?(学习数据结构必须掌握的模型)
目录 0.前言 1. 什么是环形队列 2. 如何使用数组结构 / 链表结构 对环形队列封装 3. 代码手撕环形队列各个接口 3.1 代表封装一个环形队列 3.2 环形队列的初始化 3.3 环形队列的插入 3.4环形队列的删除 3.5环形队列的判空 3.6环形队列的判满 3.7环形队列的队头 3.8环…...

《痞子衡嵌入式半月刊》 第 72 期
痞子衡嵌入式半月刊: 第 72 期 这里分享嵌入式领域有用有趣的项目/工具以及一些热点新闻,农历年分二十四节气,希望在每个交节之日准时发布一期。 本期刊是开源项目(GitHub: JayHeng/pzh-mcu-bi-weekly),欢迎提交 issue,…...
对redis之键值型数据库的理解
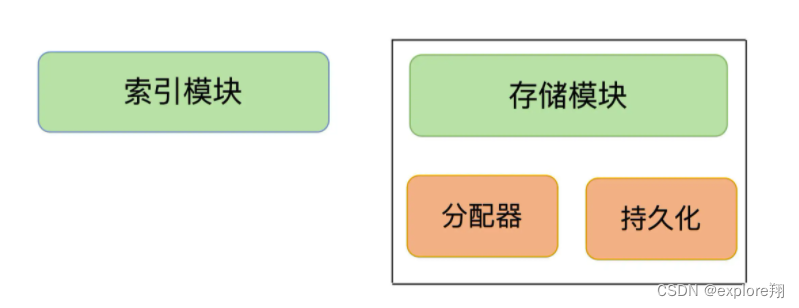
键值数据库,首先就要考虑里面可以存什么样的数据,对数据可以做什么样的操作,也就是数据模型和操作接口。它们看似简单,实际上却是我们理解 Redis 经常被用于缓存、秒杀、分布式锁等场景的重要基础。理解了数据模型,你就…...

Linux内核中的软中断、tasklet和工作队列
软中断、tasklet和工作队列并不是Linux内核中一直存在的机制,而是由更早版本的内核中的“下半部”(bottom half)演变而来。下半部的机制实际上包括五种,但2.6版本的内核中,下半部和任务队列的函数都消失了,…...
【Java】Spring Boot 2 集成 nacos
官方文档:https://nacos.io/zh-cn/docs/quick-start-spring-boot.html pom 本次Springboot版本 2.2.6.RELEASE,nacos-config 版本 0.2.7,nacos-discovery版本 0.2.7 parent <parent><groupId>org.springframework.boot</gr…...
JavaSE学习笔记day14
二、Set Set集合是Collection集合的子接口,该集合中不能有重复元素!! Set集合提供的方法签名,与父接口Collection的方法完全一致!! 即没有关于下标操作的方法 Set接口,它有两个常用的子实现类HashSet,TreeSet 三、HashSet HashSet实现了Set接口,底层是hash表(实际上底层是HashM…...
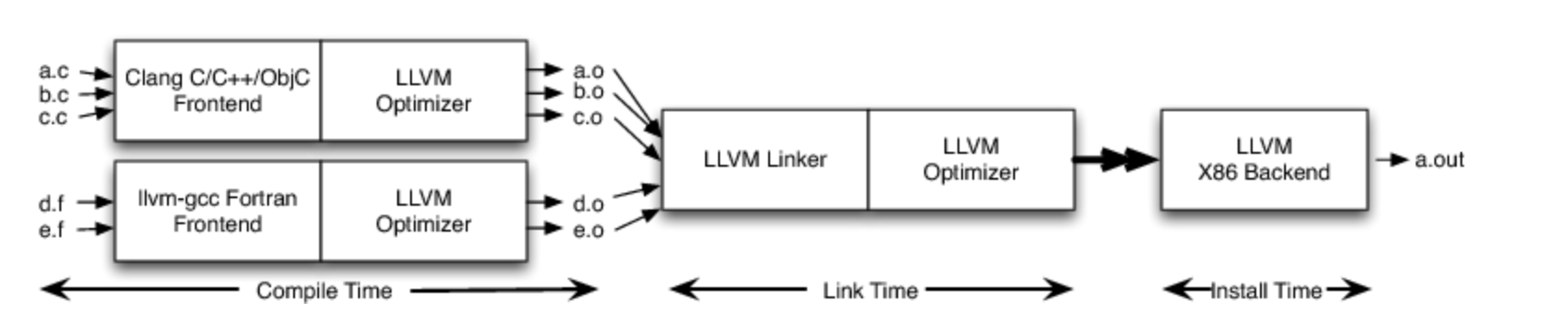
LLVM高级架构介绍
LLVM 为什么要开一个LLVM的新坑呢? 我从智能穿戴转行到芯片软件行业,从事编译器开发,不过是AI编译器。不过基本的传统编译器还是绕不过去啊,所以开始学习LLVM,后面开始学习TVM,MLIR。 LLVM GitHub地址 L…...

全网最经典函数题型【详解】——C语言
文章目录1. 写一个函数可以判断一个数是不是素数。2. 写一个函数判断一年是不是闰年。3. 写一个函数,实现一个整形有序数组的二分查找。4. 写一个函数,每调用一次这个函数,就会将 num 的值增加1。5. 写一个函数,打印乘法口诀表。6…...
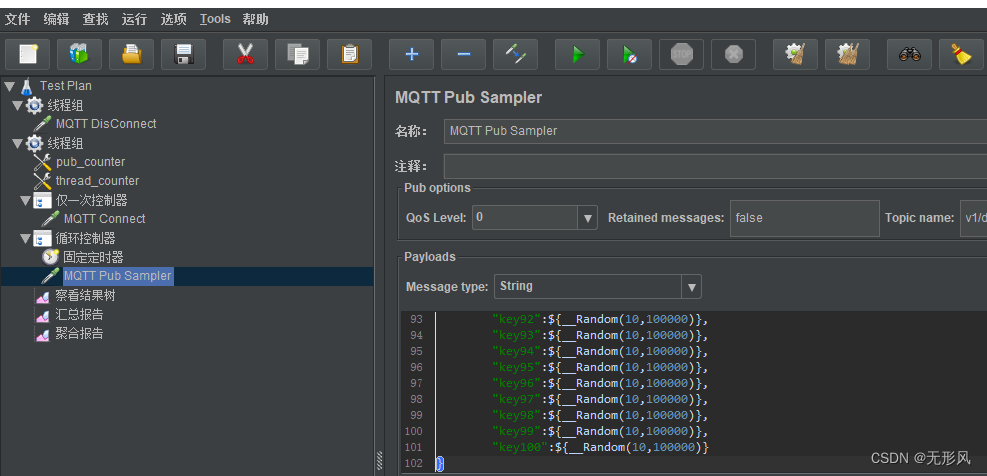
emqx桥接配置+常见问题解决+jmeter压测emqx
一,桥接资源配置及规则配置 Emqx桥接配置流程 1,配置资源并测试连接通过 规则引擎——>资源——>新建——>选择MQTT Bridge——>填写参数测试连接 参数描述详见3.1资源配置 2,配置规则 2.1根据实际业务选择合适sql 规则引擎…...
improve-1
类型及检测方式 1. JS内置类型 JavaScript 的数据类型有下图所示 其中,前 7 种类型为基础类型,最后 1 种(Object)为引用类型,也是你需要重点关注的,因为它在日常工作中是使用得最频繁,也是需要…...

华为OD机试用Python实现 -【云短信平台优惠活动】(2023-Q1 新题)
华为OD机试题 华为OD机试300题大纲云短信平台优惠活动题目描述输入描述输出描述示例一输入输出说明示例二输入输出说明Python 代码实现代码编写思路华为OD机试300题大纲 参加华为od机试,一定要注意不要完全背诵代码,需要理解之后模仿写出,通过率才会高。 华为 OD 清单查看…...

Facebook广告投放运营中的关键成功因素是什么?
在当今数字化的时代,广告投放已经成为了各种企业获取市场份额和增加品牌曝光的重要手段之一。Facebook作为全球最大的社交媒体平台之一,其广告投放运营的成功,将直接影响企业的品牌推广和市场营销效果。本文将探讨Facebook广告投放运营中的关…...

2023年1月综合预订类APP用户洞察——旅游市场复苏明显,三年需求春节集中释放
2023年1月,随着国家对新型冠状病毒感染实施“乙类乙管”,不再对入境人员和货物等采取检疫传染病管理措施,并且取消入境后全员核酸检测和集中隔离,横亘在旅游者与旅游目的地之间的隔阂从此彻底消失。2023年1月恰逢春节假期…...

基于stm32计算器设计
这里写目录标题 完整de代码可q我获取1 系统功能设计2 系统硬件系统分析设计2.1 STM32单片机核心电路设计2.2 LCD1602液晶显示模块电路设计2.3 4X4矩阵键盘模块设计3 STM32单片机系统软件设计3.1 编程语言选择3.2 Keil程序开发环境3.3 FlyMcu程序烧录软件介绍3.4 CH340串口程序烧…...
)
基于SpringCloud的可靠消息最终一致性02:项目骨架代码(上)
在上一节中咱们已经把分布式事务问题交代了一遍,包括两大定理、五大解决方案和一个成熟的开源框架,而咱们最终的目标是用Spring Cloud实现一个实际创业项目的可靠消息最终一致性的分布式事务方案。 先交代一下项目背景。 前几年,社会上慢慢兴起一种称为C2C同城快递的业务,也…...

RockerMQ集群部署
目录一、Broker集群模式1、单Master:2、多Master多Slave模式异步复制3、多Master多Slave模式同步双写二、集群搭建实践1、集群架构2、克隆生成rocketmqos13、修改rocketmqos1配置文件4、克隆生成rocketmqOS25、修改rocketmqOS2配置文件6、启动服务器7、测试一、Brok…...

多模态2025:技术路线“神仙打架”,视频生成冲上云霄
文|魏琳华 编|王一粟 一场大会,聚集了中国多模态大模型的“半壁江山”。 智源大会2025为期两天的论坛中,汇集了学界、创业公司和大厂等三方的热门选手,关于多模态的集中讨论达到了前所未有的热度。其中,…...
NXP S32K146 T-Box 携手 SD NAND(贴片式TF卡):驱动汽车智能革新的黄金组合
在汽车智能化的汹涌浪潮中,车辆不再仅仅是传统的交通工具,而是逐步演变为高度智能的移动终端。这一转变的核心支撑,来自于车内关键技术的深度融合与协同创新。车载远程信息处理盒(T-Box)方案:NXP S32K146 与…...

return this;返回的是谁
一个审批系统的示例来演示责任链模式的实现。假设公司需要处理不同金额的采购申请,不同级别的经理有不同的审批权限: // 抽象处理者:审批者 abstract class Approver {protected Approver successor; // 下一个处理者// 设置下一个处理者pub…...
push [特殊字符] present
push 🆚 present 前言present和dismiss特点代码演示 push和pop特点代码演示 前言 在 iOS 开发中,push 和 present 是两种不同的视图控制器切换方式,它们有着显著的区别。 present和dismiss 特点 在当前控制器上方新建视图层级需要手动调用…...

MySQL 部分重点知识篇
一、数据库对象 1. 主键 定义 :主键是用于唯一标识表中每一行记录的字段或字段组合。它具有唯一性和非空性特点。 作用 :确保数据的完整性,便于数据的查询和管理。 示例 :在学生信息表中,学号可以作为主键ÿ…...

Unity UGUI Button事件流程
场景结构 测试代码 public class TestBtn : MonoBehaviour {void Start(){var btn GetComponent<Button>();btn.onClick.AddListener(OnClick);}private void OnClick(){Debug.Log("666");}}当添加事件时 // 实例化一个ButtonClickedEvent的事件 [Formerl…...
给网站添加live2d看板娘
给网站添加live2d看板娘 参考文献: stevenjoezhang/live2d-widget: 把萌萌哒的看板娘抱回家 (ノ≧∇≦)ノ | Live2D widget for web platformEikanya/Live2d-model: Live2d model collectionzenghongtu/live2d-model-assets 前言 网站环境如下,文章也主…...
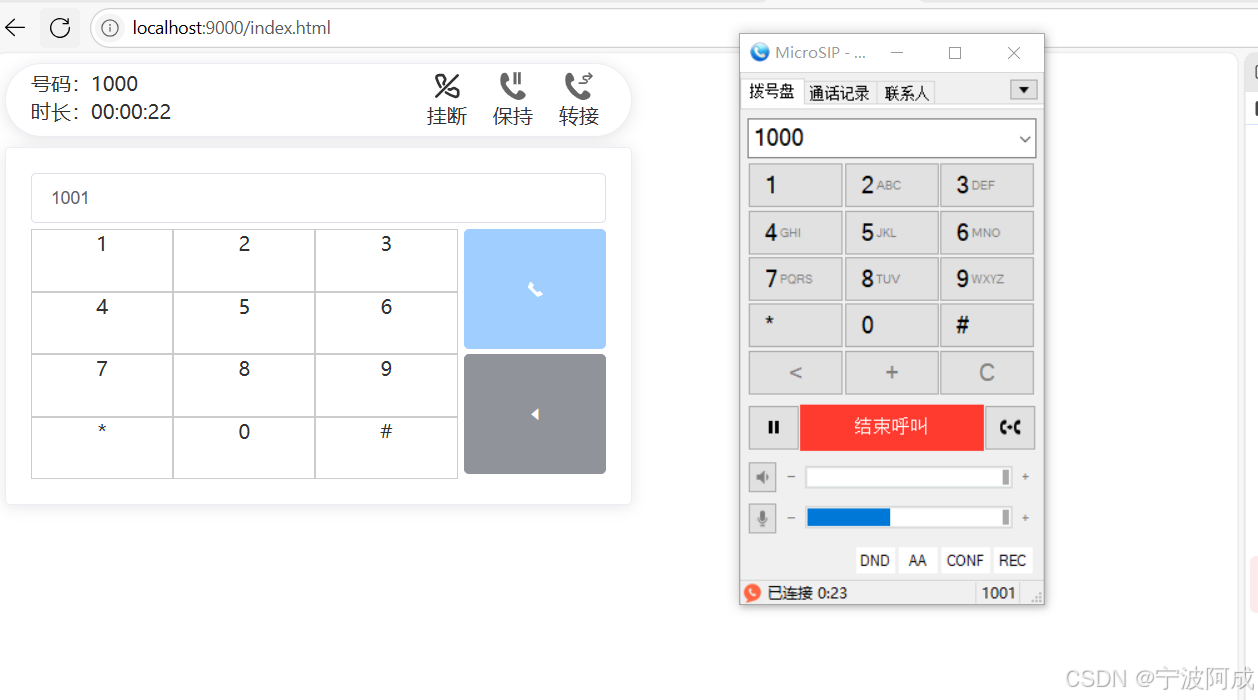
通过MicroSip配置自己的freeswitch服务器进行调试记录
之前用docker安装的freeswitch的,启动是正常的, 但用下面的Microsip连接不上 主要原因有可能一下几个 1、通过下面命令可以看 [rootlocalhost default]# docker exec -it freeswitch fs_cli -x "sofia status profile internal"Name …...

【Kafka】Kafka从入门到实战:构建高吞吐量分布式消息系统
Kafka从入门到实战:构建高吞吐量分布式消息系统 一、Kafka概述 Apache Kafka是一个分布式流处理平台,最初由LinkedIn开发,后成为Apache顶级项目。它被设计用于高吞吐量、低延迟的消息处理,能够处理来自多个生产者的海量数据,并将这些数据实时传递给消费者。 Kafka核心特…...
算法—栈系列
一:删除字符串中的所有相邻重复项 class Solution { public:string removeDuplicates(string s) {stack<char> st;for(int i 0; i < s.size(); i){char target s[i];if(!st.empty() && target st.top())st.pop();elsest.push(s[i]);}string ret…...