汽车电子专有名词与相应技术
1.EEA (Electronic & Electrical Architecture 电子电气架构)
EEA在宏观上概括为物理架构与逻辑架构的结合,微观上通过众多电子元器件的协同配合,或集成式或分布式的系统级电子电气架构,具体详见专栏 新能源汽车电子电气架构。
2.ECU (Electronic Control Unit 电子控制单元)
ECU(Electronic Control Unit)电子控制单元,又称“行车电脑”、“车载计算机”等。从用途上讲则是汽车专用微机控制器。它和普通的电脑一样,由微处理器(CPU)、存储器(ROM、、RAM)、输入/输出接口(I/O)、模数转换器(A/D)以及整形、驱动等大规模集成电路组成。用一句简单的话来形容就是“ECU就是汽车的大脑”。
ECU(Electronic Control Unit)电子控制单元,又称“行车电脑”、“车载电脑”等。从用途上讲则是汽车专用微机控制器。它和普通的电脑一样,由微处理器(CPU)、存储器(ROM、、RAM)、输入/输出接口(I/O)、模数转换器(A/D)以及整形、驱动等大规模集成电路组成。用一句简单的话来形容就是“ECU就是汽车的大脑”。
电控单元的功用是根据其内存的程序和数据对空气流量计及各种传感器输入的信息进行运算、处理、判断,然后输出指令,向喷油器提供一定宽度的电脉冲信号以控制喷油量。电控单元由微型计算机、输入、输出及控制电路等组成。
ECU一般都具备故障自诊断和保护功能,当系统产生故障时,它还能在RAM中自动记录故障代码并采用保护措施从上述的固有程序中读取替代程序来维持发动机的运转。同时这些故障信息会显示在仪表盘上并保持不灭,可以使车主及时发现问题并将汽车能开到修理厂。
3.CAN (Controller Area NetWork 控制器局域网络)
CAN是控制单元区域网络(Controller Area Network)的缩写。控制单元通过CAN网络交换数据。它是由德国博世公司于上世纪80年代初,为了解决众多传感器与执行器之间的数据交换而开发的一种串行通讯协议。
控制器局域网CAN( Controller Area Network)属于现场总线的范畴,是一种有效支持分布式控制系统的串行通信网络。是由德国博世公司在20世纪80年代专门为汽车行业开发的一种串行通信总线。由于其高性能、高可靠性以及独特的设计而越来越受到人们的重视,被广泛应用于汽车业、航空业、工业控制、安全防护等领域。
随着CAN总线在各个行业和领域的广泛应用,对其的通信格式标准化也提出了更严格的要求。1991年CAN总线技术规范(Version2.0)制定并发布。该技术规范共包括A和B两个部分。其中2.0A给出了CAN报文标准格式,而2.0B给出了标准的和扩展的两种格式。
总线将汽车上的各种电子装置与设备连成一个网络,实现相互之间的信息共享,既减少了线束,又可更好地控制和协调汽车的各个系统,使汽车性能达到最佳。
CAN总线的特点:
总线是一组能为多个部件分时共享的公共信息传送线路。
共享是指总线上可以挂接多个部件,各个部件之间互相交换的信息都可以通过这组线路分时共享。分时是指同一时刻只允许有一个部件总线发送信息,如果系统中有多个部件,则它们只能分时地向总线发送信息。
CAN总线的构成:
CAN总线由1个控制器,1个收发器,2个数据传输终端和2条传输线构成。
-
CAN控制器:接收在控制单元中的微处理器中的数据,处理数据并传给CAN收发器。同时,控制器接收收发器的数据,处理并传给微处理器。
-
CAN收发器:是一个发送器和接收器的组合。它将CAN控制器提供的数据转化为电信号并通过数据线发送出去。同时,它接收数据,并将数据传到CAN控制器。
-
数据传输终端:是一个电阻。阻止数据在传输终了被反射回来并发生反射波,这将破坏数据。
-
数据传输线:用以传输数据的双向数据线。分为CAN高位数据线和CAN低位数据线。
每个控制器都集成了微处理器、CAN控制器、CAN收发器。它们又被称作CAN网络节点。数据传输线有双绞线、同轴电缆或光纤。车辆多使用双绞线。
双绞线的作用是使外部干扰在两根导线上产生的噪声(在专业领域里,把无用的信号叫做噪声)相同,以便后续的差分电路提取出有用信号,差分电路是一个减法电路,两个输入端同相的信号(共模信号)相互抵消(m-n),反相的信号相当于x-(-y),得到增强。理论上,在双绞线及差分电路中m=n,x=y,相当于干扰信号被完全消除,有用信号加倍,但在实际运行中是有一定差异的。
简单来说就是消除共模干扰。
CAN2.0A/B标准规定:总线空闲时,CAN_H和CAN_L上的电压为2.5V
在数据传输时:
显性电平(逻辑 0):CAN_H 3.5V CAN_L 1.5V
隐性电平(逻辑 1):CAN_H 2.5V CAN_L 2.5V
4.LIN (Local Interconnect NetWork 本地互联网络)
LIN总线是CAN总线的补充,它的可靠性以及性能较低,但成本也是比较低的。下面我们将简单介绍下LIN总线的特点以及其和CAN总线之间的异同。
- 更低的成本(如果对速度或者容错性的要求较低)
- 常用在车辆的窗户、雨刮器、空调等
- LIN集群中只有一个主节点和最多有16个从节点
- 只有一根信号线(需要配合地线),波特率为1-20 kbit/s,线缆最长能达40米
- 由时间触发的调度表能保证报文间延迟的时间
- 可变的数据长度(2、4、8字节)
- LIN总线支持错误检查、校验和配置
- 工作电压为12V
- 物理层是基于ISO 9141(K线)
- 支持睡眠模式和唤醒
- 现在的新车上都还有10个以上的LIN节点
LIN 总线和 CAN 总线的对比:
- LIN 总线的成本更低(线束更少、不需要购买许可以及节点更便宜)
- CAN 总线使用双绞屏蔽线-5V,LIN 总线使用单线-12V
- LIN 总线中的主节点通常也是一个 CAN、LIN 的网关
- LIN 总线报文发送的顺序是确定的,不是事件驱动的,即没有总线仲裁
- LIN 总线中主节点只能有一个,而 CAN 总线没有主从的概念
- CAN 总线会使用 11 或 29 位的标识符,LIN 总线中的标识符是 6 位的
- CAN 总线的波特率能达 1Mbit/s 而 LIN 总线的波特率最大也就 20 kbit/s
- CAN总线采用可靠性很高的CRC校验。
- LIN总线采用可靠性相对较差的带进位的和校验。
-
CAN总线为多主机系统,即接人总线的任一电子单元都可通过总线仲裁来获取总线控制权,并向总线系统中发送信息,单元在发出完整的ID时即为主机。CAN总线使用11位ID(甚至更多),在一个子系统中可有较多的单元。
- LIN总线为单主机多从机系统,每一子系统中有且只有一个主机,所有的信息传送都由主机控制,从机必须等待主机发出了与它对应的ID后才能发送信息。LIN总线使用6位ID,在一个子系统中只能有较少的单元。

5.EPB (Electronic Parking Brake 电子驻车制动系统)
线控制动系统主要分为电子驻车制动系统EPB、电子机械线控制动系统EMB和液压式线控制动系统EHB。
EPB通过电子线路控制停车制动。功能同机械拉杆手刹。起步时可不用手动关闭电子手刹,踩油门起步时电子手刹会自动关闭。
电子驻车制动系统展现给我们的就是取代传统拉杆手刹的电子手刹按钮。 比传统的拉杆手刹更安全,不会因驾驶者的力度而改变制动效果,把传统的拉杆手刹变成了一个触手可及的按钮。
6.EHB(Electronic Hydraulic Brake 电液线控制动系统)
液压式线控制动系统(Electronic Hydraulic Brake System,简称EHB)EHB是从传统的液压制动系统发展来的,但与传统制动方式有很大的不同,EHB以电子元件替代了原有的部分机械元件,是一个先进的机电一体化系统,它将电子系统和液压系统相结合。EHB主要由电子踏板、电子控制单元(ECU)、液压执行机构组成。电子踏板是由制动踏板和踏板传感器(踏板位移传感器)组成。踏板传感器用于检测踏板行程,然后将位移信号转化成电信号传给ECU电控单元,实现踏板行程和制动力按比例进行调控。
7.EMB(Electro-Mechanical Brake 电子机械制动系统)
机械式线控制动系统(简称EMB)EMB与常规的液压制动系统截然不同,EMB以电能为能量来源,通过电机驱动制动垫块,由电线传递能量,数据线传递信号,EMB是线制动系统的一种。整个系统中没有连接制动管路,结构简单,体积小,信号通过电传播,反应灵敏,减小制动距离,工作稳定,维护简单,没有液压油管路,不存在液压油泄露问题,通过ECU直接控制,易于实现ABS、TCS、ESP、ACC等功能。
8.ABS(Anti-lock Brake System 汽车防抱死系统)
ABS作用就是在汽车制动时,自动控制制动器制动力的大小,使车轮不被抱死,处于边滚边滑(滑移率在20%左右)的状态。
9.ASR(Acceleration Slip Regulation 汽车驱动防滑系统)
ASR防止车辆尤其是大功率汽车在起步、再加速时驱动轮的打滑现象,以维持车辆行驶方向的稳定性与通过性。
10.ESP(Acceleration Slip Regulation 汽车电子稳定程序)
ESP防止车辆尤其是大功率汽车在起步、再加速时驱动轮的打滑现象,以维持车辆行驶方向的稳定性与通过性。
11.ECS (Electronic Control Suspension电子控制悬挂系统)
汽车ECS是指汽车的车架与车桥或车轮之间一切传力连接装置的总称。汽车电子控制悬挂系统的组成部分包括:弹性元件、导向机构、减震器、缓冲块、横向稳定杆,其根据控制形式不同分为:
1、被动式悬架系统;
2、主动式悬架系统;
根据汽车导向机构不同可分为:
1、独立悬架系统;
2、非独立悬架系统。
汽车电子控制悬挂系统的作用是:
1、传递车轮和车架之间的力和力扭;
2、缓冲由不平路面传给车架或车身的冲击力和震动;
3、保障车轮在固定的角度内活动,使转向稳定;
4、支撑车轮的重量;
5、维持车轮与地面的良好接触。
12.EPS(Electric Power Steering 电控动力转向系统)
汽车EPS是有电动助力机直接提供的转向助力,省去了叶亚动力转向系统中必须要用的动力转向油泵、软管、液压油以及传送带还有发动机上的皮带轮,使用EPS这种系统,能节省下来很多零件,直接利用电动机产生的动力来协助驾驶员完成动力转向,根本上节约了不少资源,而且环保性更强,EPS能够对每个车轮都进行独立制动,参与发动机系统的管理,使得车子行驶起来更加安全。
扩展仪表盘eps灯亮表示电子助力转向可能出现的故障如下:
1、传感器损坏。
2、方向机损坏。
3、助力油泄漏。
13.EBD(Electric Brake force Distribution 电子制动力分配系统)
EBD是ABS的新发展,它是在ABS原有的基础上发展而来的系统。它可以在制动时控制制动力在各轮间的分配,更好的利用车轮的附着系数,不仅提高了汽车制动的稳定性和操纵性,而且使各个车轮能够获得更好的制动性能,缩短制动距离,提高安全性。
EBD的工作原理是在刹车的时候,车辆四个车轮的刹车卡钳均会动作,将车辆停下。在路面状况有变异时,加上减速时车辆重心的转移,四个车轮与地面间的抓地力将有所不同,刹车系统会平均将刹车总泵的力量分配至四个车轮。EBD可以在汽车制动的瞬间,高速计算出四个轮胎由于附着不同而导致的摩擦力数值,调整制动装置,使其按照设定的程序在运动中高速调整,达到制动力与摩擦力的匹配,以保证车辆的平稳和安全。
14.EAT(电控自动变速器 Electronic Automatic Transmission)
自动变速器的作用是:
1、改变传动比,扩大驱动轮转矩和转速的变化范围,以适应经常变化的行驶条件,同时使发动机在有利的工况下工作;
2、在发动机旋转方向不变情况下,使汽车能倒退行驶;
3、利用空挡中断动力传递,以发动机能够启动、怠速,并便于变速器换挡或进行动力输出。
电控自动变速器 EAT 主要由液力变矩器,行星齿轮变速系统,换档执行器,液压操纵系统,电子控制系统,冷却装置等组成。其中变矩器是构成液力自动变速器的重要组成部分,装置在发动机的飞轮上。具有以下特点:
1、液力变矩器将发动机的输出扭矩增大后传递给行星齿轮系统,并在一定范围内进行无级变速。
2、齿轮变速系统实现改变传动比和传动方向的最终目的。
3、换档执行器作用是驱动行星齿轮机构工作,构成新的动力传递路线,即所谓的“换档”。
4、液压操纵系统的作用是根据司机的意感和行驶条件的变化,利用电磁阀控制换档阀的动作,以实现换档过程。
5、电子控制系统主要根据车速传感器及节气门位置传感器的信号确定档位及换档点,输出换档指令,通过电磁阀产生液压信号来控制换档阀的动作,实现自动换档过程。
6、冷却装置使油温保持在80°C-90°C范围
15.SBC(电子感应制动控制系统)
16.BAS (辅助制动系统)
17.SRS(安全气囊)
18.CVT (无极变速器)
19.CCS (巡航控制系统)
相关文章:
汽车电子专有名词与相应技术
1.EEA (Electronic & Electrical Architecture 电子电气架构) EEA在宏观上概括为物理架构与逻辑架构的结合,微观上通过众多电子元器件的协同配合,或集成式或分布式的系统级电子电气架构,具体详见专栏 新能源汽车电…...

idea 没加载 provided的包
目录 前言解决方案 前言 我的版本是IntelliJ IDEA 2022.1.4 (Community Edition),本地调试不知道为什么不加载provided的包。后来找到这篇文章https://youtrack.jetbrains.com/issue/IDEA-107048才知道这是个bug。不知道其他版本会不会出现这种问题。 解决方案 我…...

Hover:借贷新势力崛起,在经验与创新中找寻平衡
复苏中的Cosmos 如果让我选择一个最我感到可惜的区块链项目,我会选择Cosmos。 Cosmos最早提出并推动万链互联的概念,希望打通不同链之间的孤岛,彼时和另一个天王项目Polkadot号称跨链双雄。其跨链技术允许不同的区块链网络互相通信…...

软件设计原则-依赖倒置原则讲解以及代码示例
依赖倒置原则 一,介绍 1.前言 依赖倒置原则(Dependency Inversion Principle,DIP)是面向对象设计中的一个重要原则,由Robert C. Martin提出。 依赖倒置原则的核心思想是:高层模块不应该依赖于低层模块&…...

Linux--进程替换
1.什么是进程替换 在fork函数之后,父子进程各自执行代码的一部分,但是如果子进程想要执行一份全新的程序呢? 通过进程替换来完成,进程替换就是父子进程代码发生写时拷贝,子进程执行自己的功能。 程序替换就是通过特定的…...
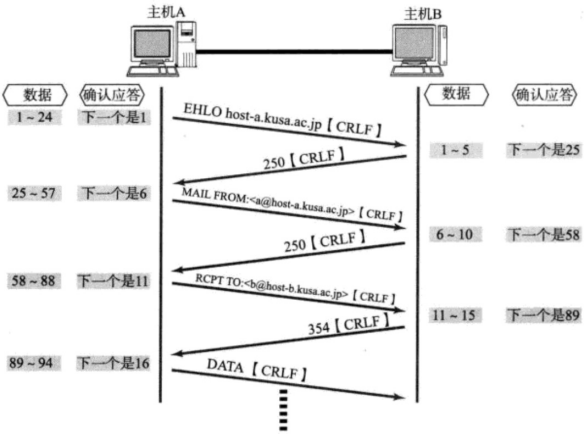
【计算机网络】TCP协议
文章目录 1. TCP报文的结构2. TCP的发送缓冲区和接收缓冲区3. 确保可靠性序列号和确认序列号确认应答超时重传连接管理1️⃣三次握手建立连接2️⃣四次挥手断开连接 4. 提高性能流量控制滑动窗口拥塞控制延迟应答捎带应答 5. 面向字节流6. TCP/UDP对比 概念:TCP&…...

机器学习数据集:Kaggle
什么是Kaggle? Kaggle成立于2010年,是一个进行数据发掘和预测竞赛的在线平台。从公司的角度来讲,可以提供一些数据,进而提出一个实际需要解决的问题;从参赛者的角度来讲,他们将组队参与项目,针…...
)
软考 系统架构设计师系列知识点之设计模式(4)
接前一篇文章:软考 系统架构设计师系列知识点之设计模式(3) 所属章节: 老版(第一版)教材 第7章. 设计模式 第2节. 设计模式实例 3. 行为型模式 行为型模式可以影响一个系统的状态和行为流。通过优化状态…...
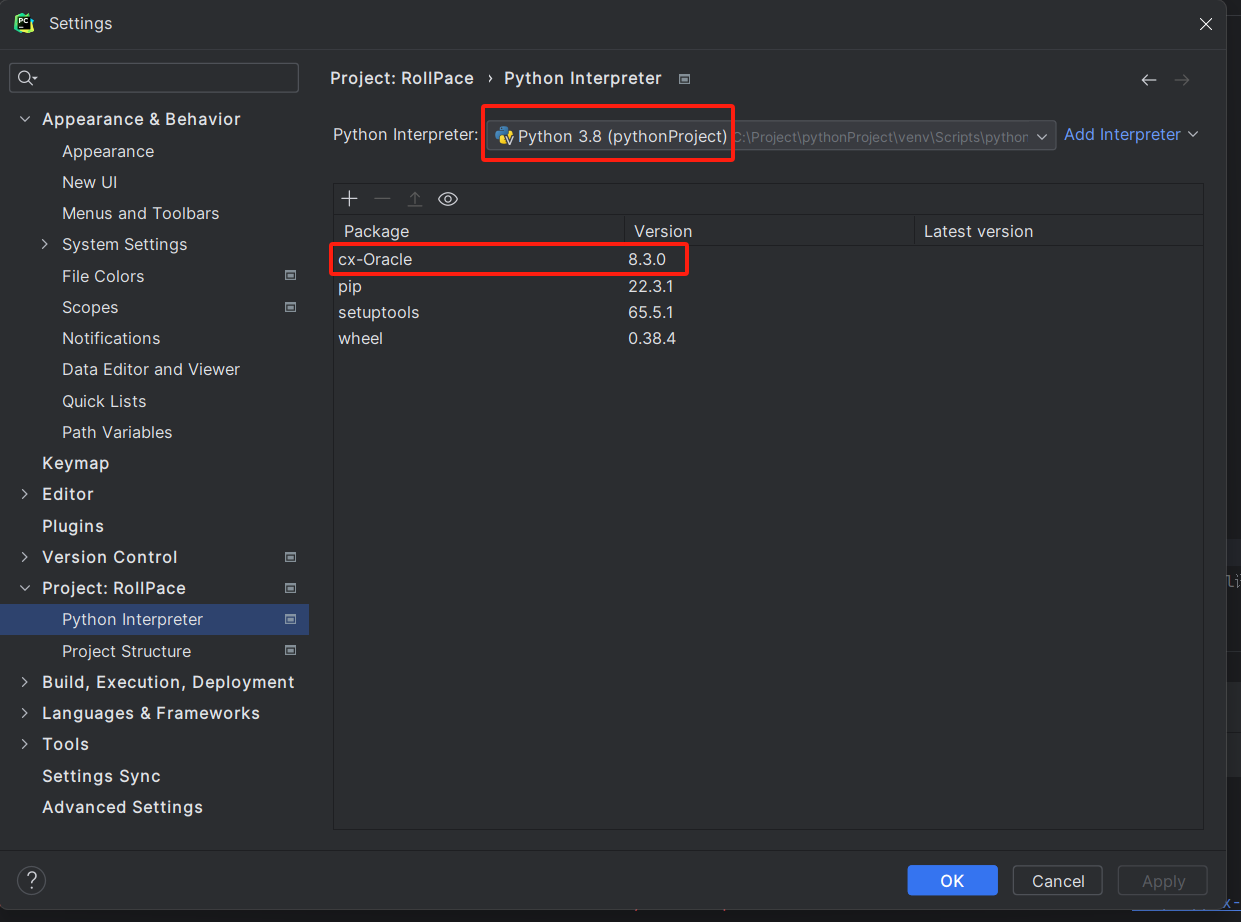
PyCharm 安装 cx_Oracle 失败
我在PyCharm的终端用 pip安装cx_Oracle失败,报错情况如下: ERROR: Could not build wheels for cx_Oracle, which is required to install pyproject.toml-based projects 出错原因: python 的版本太高了,我的是3.11版本的&…...

解决Windows出现找不到mfcm90u.dll无法打开软件程序的方法
今天,我非常荣幸能够在这里与大家分享关于mfc90u.dll丢失的5种解决方法。在我们日常使用电脑的过程中,可能会遇到一些软件或系统错误,其中之一就是mfc90u.dll丢失。那么,mfc90u.dll究竟是什么文件呢?接下来,…...

如何设计线程安全的 HashMap?
如何设计线程安全的 HashMap? HashMap 线程不安全的体现: 多线程下扩容死循环:JDK1.7中的 HashMap 使用头插法插入元素,在多线程的环境下,扩容的时候有可能导致环形链表的出现,形成死循环。因此,JDK1.8使…...

rpc汇总
1、什么是rpc rpc的应用,有哪些 Google 开源了 gRPC, Facebook 开源了 Thrift, Twitter 开源了 Finagle, 百度开源了bRPC, 腾讯开源了 Tars, 阿里开源了 Dubbo 和 HSF, 新浪开源了 Motan 等 gr…...

OpenCV学习(五)——图像基本操作(访问图像像素值、图像属性、感兴趣区域ROI和图像边框)
图像基本操作 5. 图像基本操作5.1 访问像素值并修改5.2 访问图像属性5.2 图像感兴趣区域ROI5.3 拆分和合并图像通道5.4 为图像设置边框(填充) 5. 图像基本操作 访问像素值并修改访问图像属性设置感兴趣区域(ROI)分割和合并图像 …...
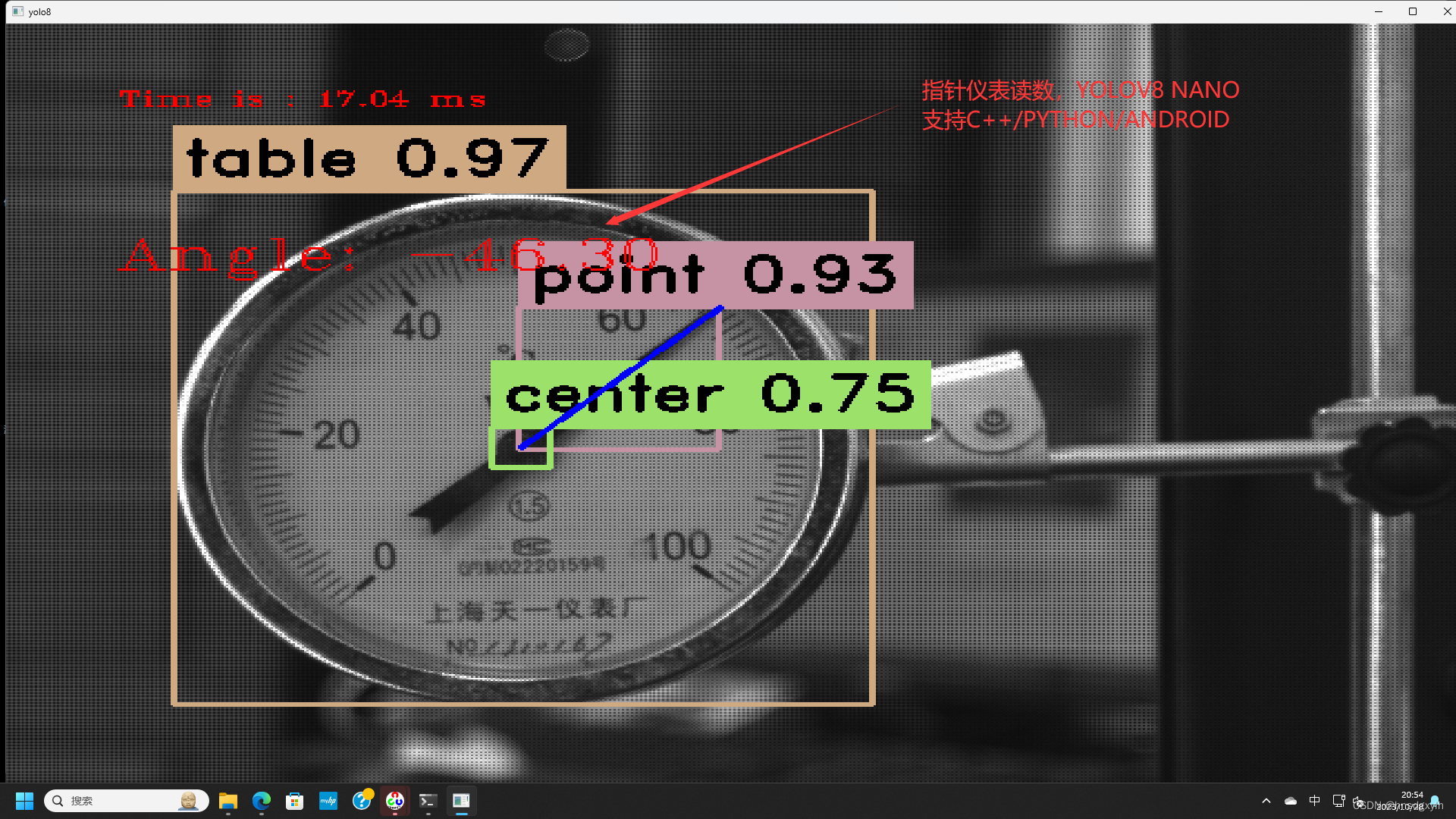
指针仪表读数YOLOV8NANO
指针仪表读数YOLOV8 NANO 采用YOLOV8 NANO训练,标记,然后判断角度,得出角度,可以通过角度,换算成数据...

10000字!图解机器学习特征工程
文章目录 引言特征工程1.特征类型1.1 结构化 vs 非结构化数据1.2 定量 vs 定性数据 2.数据清洗2.1 数据对齐2.2 缺失值处理 原文链接:https://www.showmeai.tech/article-detail/208 作者:showmeAI 引言 上图为大家熟悉的机器学习建模流程图,…...

Java 官方提供了哪几种线程池,分别有什么特点?
JDK 中提供了 5 中不同线程池的创建方式: newCachedThreadPool newCachedThreadPool, 是一种可以缓存的线程池,它可以用来处理大量短期的突发流量。 它的特点有三个,最大线程数是 Integer.MaxValue,线程存活时间是 60 …...
DTI-ALPS处理笔记
DTI-ALPS处理笔记 前言: 前段时间刚好学习了一下DTI-ALPS处理(diffusion tensor image analysis along the perivascular space ),记录一下,以便后续学习。ALPS是2017年发表在《Japanese Journal of Radiology》的一篇文章首次提出的 (文章地址),主要用于无创评估脑内淋…...
LVS集群-NAT模式
集群的概念: 集群:nginx四层和七层动静分离 集群标准意义上的概念:为解决特定问题将多个计算机组合起来形成一个单系统 集群的目的就是为了解决系统的性能瓶颈。 垂直扩展:向上扩展,增加单个机器的性能,…...

微服务技术导学
文章目录 微服务结构认识微服务技术栈 微服务结构 技术: 解决异常定位: 持续集成,解决自动化的部署: 总结如下: 认识微服务 微服务演变: 技术栈 SpringCloud与SpringBoot版本对应关系...

p5.js 开发点彩画派的绘画工具
本文简介 点赞 关注 收藏 学会了 这几天在整理书柜时看到这套书,看到梵高,想起他的点彩画。 想到点彩画派,不得不提的一个画家叫乔治皮埃尔秀拉。据说梵高也模仿过他的画作。 我引用一下维基百科对点彩画派的解析: 点彩画派&…...

【Axure高保真原型】引导弹窗
今天和大家中分享引导弹窗的原型模板,载入页面后,会显示引导弹窗,适用于引导用户使用页面,点击完成后,会显示下一个引导弹窗,直至最后一个引导弹窗完成后进入首页。具体效果可以点击下方视频观看或打开下方…...

conda相比python好处
Conda 作为 Python 的环境和包管理工具,相比原生 Python 生态(如 pip 虚拟环境)有许多独特优势,尤其在多项目管理、依赖处理和跨平台兼容性等方面表现更优。以下是 Conda 的核心好处: 一、一站式环境管理:…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...
【第二十一章 SDIO接口(SDIO)】
第二十一章 SDIO接口 目录 第二十一章 SDIO接口(SDIO) 1 SDIO 主要功能 2 SDIO 总线拓扑 3 SDIO 功能描述 3.1 SDIO 适配器 3.2 SDIOAHB 接口 4 卡功能描述 4.1 卡识别模式 4.2 卡复位 4.3 操作电压范围确认 4.4 卡识别过程 4.5 写数据块 4.6 读数据块 4.7 数据流…...

江苏艾立泰跨国资源接力:废料变黄金的绿色供应链革命
在华东塑料包装行业面临限塑令深度调整的背景下,江苏艾立泰以一场跨国资源接力的创新实践,重新定义了绿色供应链的边界。 跨国回收网络:废料变黄金的全球棋局 艾立泰在欧洲、东南亚建立再生塑料回收点,将海外废弃包装箱通过标准…...
学习STC51单片机31(芯片为STC89C52RCRC)OLED显示屏1
每日一言 生活的美好,总是藏在那些你咬牙坚持的日子里。 硬件:OLED 以后要用到OLED的时候找到这个文件 OLED的设备地址 SSD1306"SSD" 是品牌缩写,"1306" 是产品编号。 驱动 OLED 屏幕的 IIC 总线数据传输格式 示意图 …...

c#开发AI模型对话
AI模型 前面已经介绍了一般AI模型本地部署,直接调用现成的模型数据。这里主要讲述讲接口集成到我们自己的程序中使用方式。 微软提供了ML.NET来开发和使用AI模型,但是目前国内可能使用不多,至少实践例子很少看见。开发训练模型就不介绍了&am…...
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据 Power Query 具有大量专门帮助您清理和准备数据以供分析的功能。 您将了解如何简化复杂模型、更改数据类型、重命名对象和透视数据。 您还将了解如何分析列,以便知晓哪些列包含有价值的数据,…...
佰力博科技与您探讨热释电测量的几种方法
热释电的测量主要涉及热释电系数的测定,这是表征热释电材料性能的重要参数。热释电系数的测量方法主要包括静态法、动态法和积分电荷法。其中,积分电荷法最为常用,其原理是通过测量在电容器上积累的热释电电荷,从而确定热释电系数…...

MinIO Docker 部署:仅开放一个端口
MinIO Docker 部署:仅开放一个端口 在实际的服务器部署中,出于安全和管理的考虑,我们可能只能开放一个端口。MinIO 是一个高性能的对象存储服务,支持 Docker 部署,但默认情况下它需要两个端口:一个是 API 端口(用于存储和访问数据),另一个是控制台端口(用于管理界面…...