V3Det大规模词汇视觉检测数据集与LaRS海上全景障碍物检测数据集
V3Det与LaRS是ICCV2023上发表的数据集工作,规模都比较大,后续有可能会用到,因此记录下来。
V3Det: Vast Vocabulary Visual Detection Dataset
Paper: https://arxiv.org/abs/2304.03752
URL: https://v3det.openxlab.org.cn/
在现实世界中检测任意对象的最新进展是在词汇相对有限的对象检测数据集上进行训练和评估的。为了便于开发更通用的视觉对象检测,我们提出了V3Det,这是一个庞大的词汇视觉检测数据集,在海量图像上具有精确注释的边界框。V3Det具有几个吸引人的特性:1)丰富的词汇:它包含来自真实世界图像上13204个类别的对象的边界框,比现有的大词汇对象检测数据集(例如LVIS)大10倍。2) 层次类别组织:V3Det的庞大词汇由一个层次类别树组织,该树注释了类别之间的包含关系,鼓励在庞大和开放的词汇对象检测中探索类别关系。3) 丰富的注释:V3Det包含243k张图像中的精确注释对象,以及由人类专家和强大的聊天机器人编写的每个类别的专业描述。通过提供广阔的探索空间,V3Det能够在大量和开放词汇的对象检测方面实现广泛的基准测试,为未来的研究带来新的观察、实践和见解。它有潜力成为开发更通用视觉感知系统的基石数据集。

LaRS: A Diverse Panoptic Maritime Obstacle Detection Dataset and Benchmark
Paper: https://arxiv.org/abs/2308.09618
URL: https://lojzezust.github.io/lars-dataset/
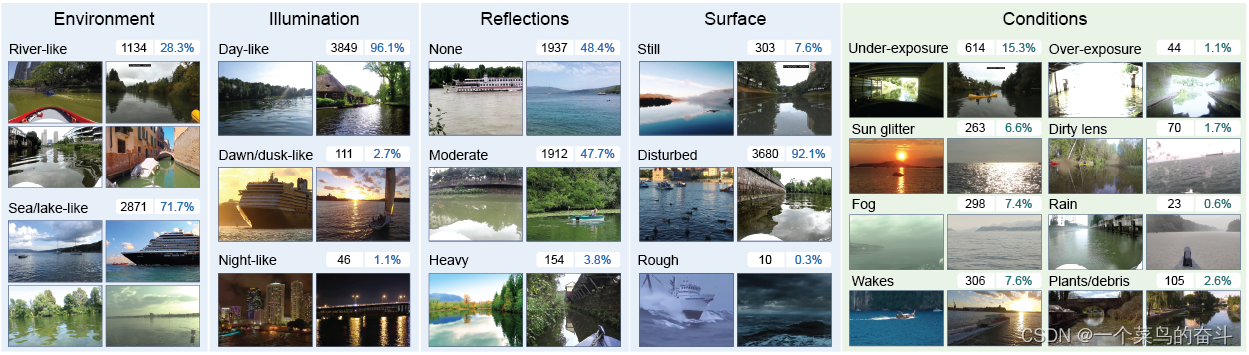
由于缺乏能够充分捕捉一般海洋环境复杂性的多样化数据集,阻碍了海洋障碍物检测的进展。我们展示了第一个海上全景障碍物探测基准LaRS,以湖泊、河流和海洋为特色。我们的主要贡献是新的数据集,它在记录位置、场景类型、障碍物类别和采集条件方面拥有相关数据集中最大的多样性。LaRS由4000多个每像素标记的关键帧和9个前帧组成,以允许利用时间纹理,总计超过40k帧。每个关键帧都用11个事物类和19个全局场景属性进行注释。我们报告了27种语义和全景分割方法的结果,以及一些性能见解和未来的研究方向。

相关文章:
V3Det大规模词汇视觉检测数据集与LaRS海上全景障碍物检测数据集
V3Det与LaRS是ICCV2023上发表的数据集工作,规模都比较大,后续有可能会用到,因此记录下来。 V3Det: Vast Vocabulary Visual Detection Dataset Paper: https://arxiv.org/abs/2304.03752 URL: https://v3det.openxlab.org.cn/ 在现实世界中…...

ubuntu(18.04) 安装 blast
1、下载 https://ftp.ncbi.nlm.nih.gov/blast/executables/blast/LATEST/2、解压,配置环境变量 tar zvxf ncbi-blast-2.14.1-x64-linux.tar.gz解压后改名为 blast 配置环境变量,可以不配置 使用的时候直接绝对路径使用 vim ~/.bashrc 将下面添加道最…...
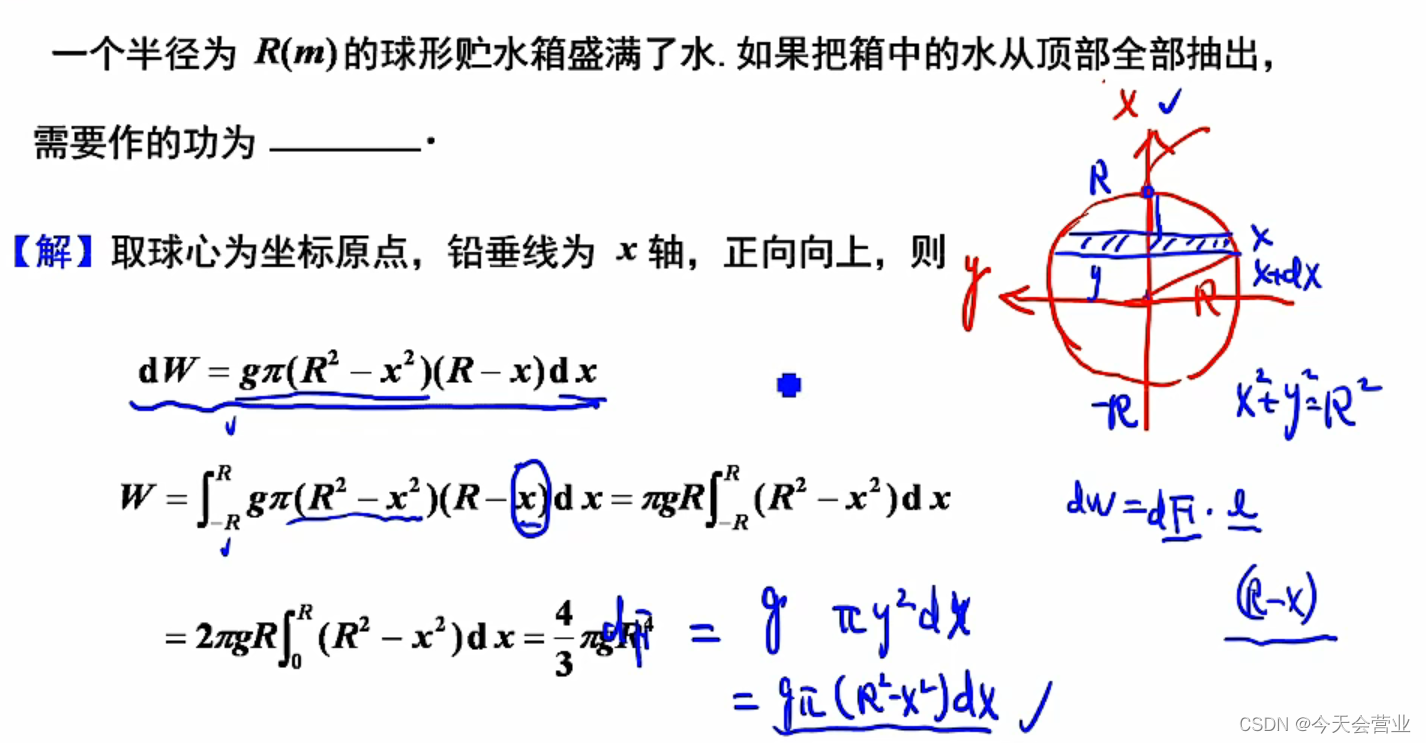
3.2每日一题(定积分求抽水做工问题)
1、画图,把题目的容器画出来:球形容器,半径为R 2、根据容器的形状进行分析: 抽水的实质是不同深度的水抽出去走的位移是不一样的>抽水的过程 : (1)先考虑深度为 x到xdx 的薄层水抽出去做多少…...

c语言基础:L1-063 吃鱼还是吃肉
国家给出了 8 岁男宝宝的标准身高为 130 厘米、标准体重为 27 公斤;8 岁女宝宝的标准身高为 129 厘米、标准体重为 25 公斤。 现在你要根据小宝宝的身高体重,给出补充营养的建议。 输入格式: 输入在第一行给出一个不超过 10 的正整数 N&am…...

<if> 标签中使用了不正确的语法。在 XML 中,<if> 标签不需要使用 <![CDATA[ ... ]]> 将条件语句包装起来。 否则会报错
标签中使用了不正确的语法。在 XML 中, 标签不需要使用 <![CDATA[ ... ]]> 将条件语句包装起来。 否则会报错...
Ubuntu 诞生 19 年
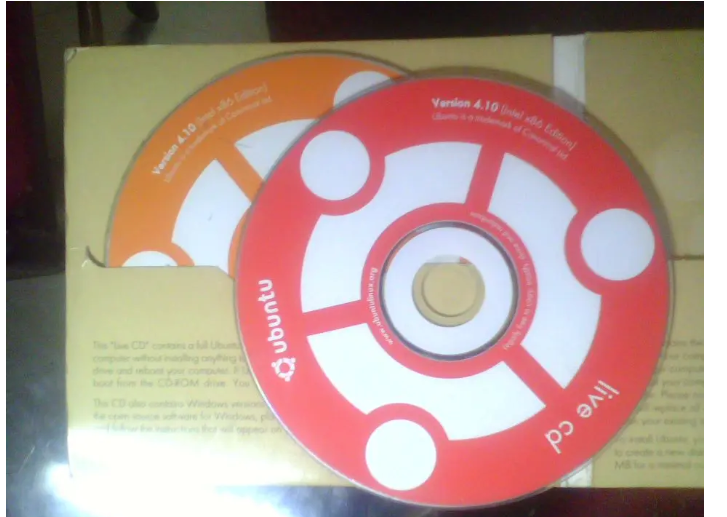
导读2004 年 10 月 20 日,Ubuntu 4.10 正式发布,代号‘Warty Warthog’。 作为 Ubuntu 第一个版本,4.10 问世后立刻受到广大 Linux 用户欢迎。它搭载了当时最新的 GNOME 2.8 桌面环境,以及一系列实用软件,比如 Mozilla…...
JVM进阶(3)
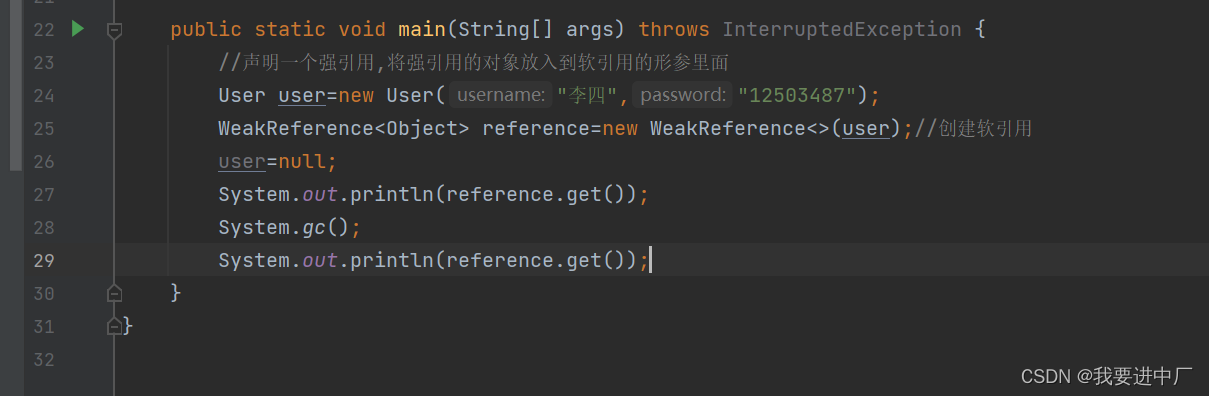
一)什么是垃圾? 垃圾指的是在应用程序中没有任何指针指向的对象,这个对象就是需要被回收的垃圾,如果不及时的针对内存中的垃圾进行清理,那么这些垃圾对象所占用的内存空间可能一直保留到应用程序结束,被保留的空间无法…...
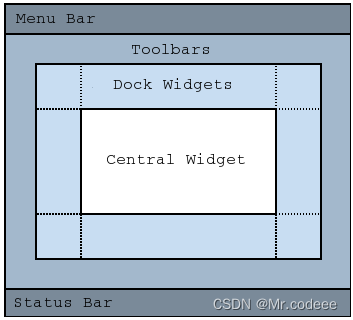
Qt QWidget、QDialog、QMainWindow的区别
QWidget QWidget是Qt框架中最基础的窗口类,可以理解为用户界面的最基本单元。QWidget类提供了一个空白窗口,可以通过继承该类来创建自定义的窗口类。QWidget类提供了基本的窗口属性和方法,如大小、位置、标题、图标等。 QDialog QDialog是…...
)
软考 系统架构设计师系列知识点之设计模式(10)
接前一篇文章:软考 系统架构设计师系列知识点之设计模式(9) 所属章节: 老版(第一版)教材 第7章. 设计模式 第2节. 设计模式实例 相关试题 9. 某软件公司欲设计一款图像处理软件,帮助用户对拍…...

【python爬虫】设计自己的爬虫 1. request封装
通过requests.session().request 封装request方法 考虑到请求HTTP/2.0 同时封装httpx 来处理HTTP/2.0的请求 封装requests # 遇到请求失败的情况时 重新请求,请求5次等待2s retry(stop_max_attempt_number5, retry_on_resultlambda re_data: re_data is None, wai…...

8.0 新特性 - innodb_ddl_threads
前言 MySQL 8.0.27 引入了一个新变量来控制 InnoDB 可用于创建(排序和构建)二级索引的最大并行线程数:innodb_ddl_threads 通过调整该参数,可以提升二级索引的创建速度。 参数介绍 1. innodb_ddl_threads 创建二级索引时&…...
pgAdmin 4 v7.8 发布,PostgreSQL 开源图形化管理工具
导读pgAdmin 是 PostgreSQL 领先的开源图形化管理工具。pgAdmin 4 旨在满足新手和有经验的 Postgres 用户的需求,提供强大的图形界面,简化了数据库对象的创建、维护和使用。 pgAdmin 开发团队日前发布了 pgAdmin 4 v7.8 版本,这个版本包括 21…...
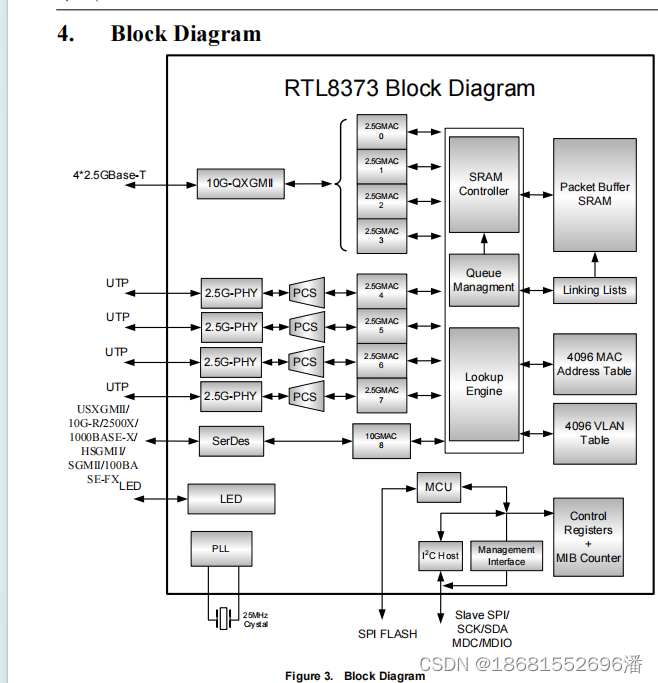
Realrek 2.5G交换机 8+1万兆光RTL8373-VB-CG方案简介
新一代2.5G交换机方案RTL8373-VB-CG可以提供4中不同形态 a. 52.5G 电口110G光》RTL8373 b. 52.5G 电口110G电》RTL83738261 c. 82.5G 电口110G光》RTL83738224 d.82.5G 电口110G电口》RTL837382248261 1.概述 Realtek RTL8373-CG是一款低功耗、高性能、高度集成的八端口2.5G和一…...

Linux命令随笔
文章目录 grep命令 grep命令 例如,在Linux系统中,要在当前目录下的所有文件中搜索包含字符串"hello"的行,并显示文件名,可以使用以下命令: grep -r "hello" .其中,"."表示…...

最新版scene-builder安装
JavaFX Scene Builder是一个可视化的布局工具,用于设计JavaFX用户界面。它允许开发人员使用拖放和可视化的方式创建和编辑JavaFX界面,而无需直接编写代码。 JavaFX Scene Builder提供了一个直观的界面,让开发人员可以轻松地创建和修改JavaFX…...

直击电商商城内核!一站式解决方案
作为一家深耕电商运营多年的软件开发公司,我们拥有先进的轻量级电商中台系统,且100%开源,包含B2C、B2B2C、S2B2C、O2O和社区团购等多种商业模式,无论在技术、业务架构、功能、设计还是售后支持上,我们都秉承着追求极致…...
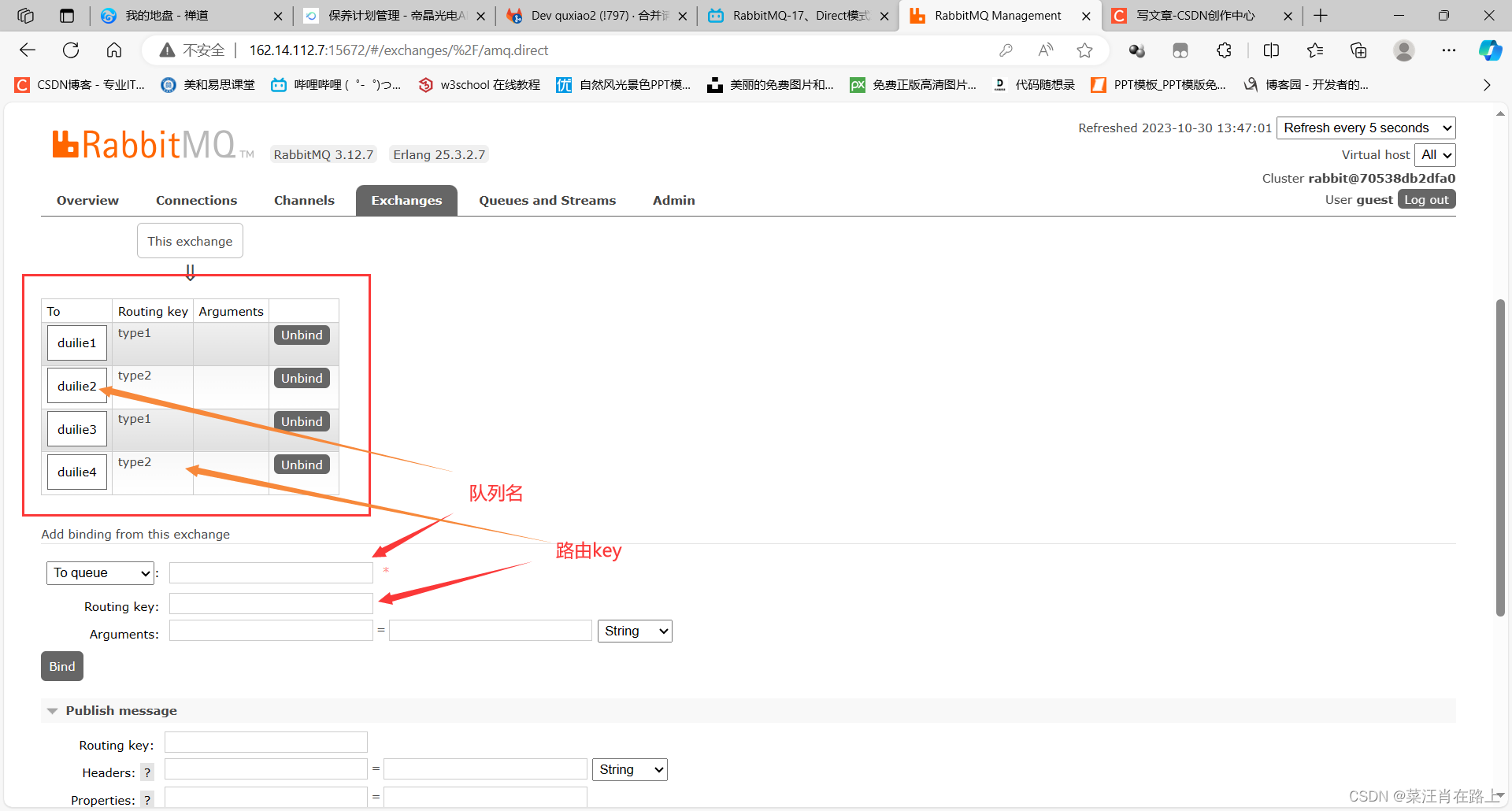
rabbitmq安装、基本使用
docker run -it --rm --name rabbitmq -p 5672:5672 -p 15672:15672 rabbitmq:3.12-management docker会自己下载,然后运行 进入docker: docker exec -it rabbitmq bash 进入容器,重启rabbitmq:rabbitmq-server restart 感觉所有的…...
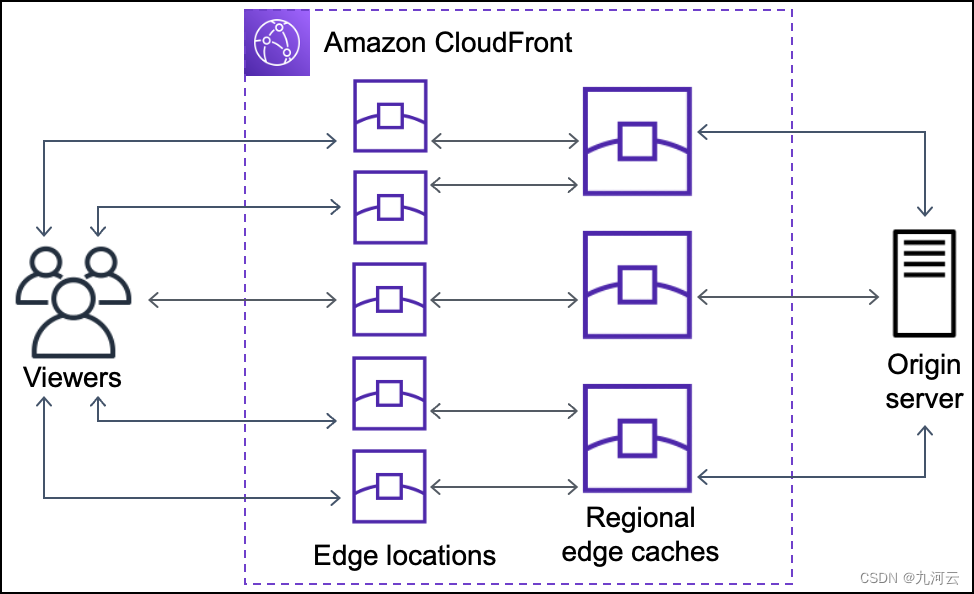
Amaon CloudFront助力出海业务访问优化
企业的展示网站需要面向多个国家的客户时,由于地理位置的原因。往往会出现一个痛点,网络延迟太高,以至于图片、视频播放时会非常卡顿。客户的访问体验非常差,直接影响到企业收益。此篇文章九河云综合分析Amaon CloudFront…...

python实现ModBusRTU服务端
python实现基于串口通信的ModBusRTU服务端是一件简单的事情,只要通过pymodbus模块和Serial模块就可以实现。...

yum安装node,npm
node官网 yum -y install nodejs npm 查看版本 npm -v node -v卸载 yum -y remove nodejs npm修改镜像源 4.1. 修改淘宝镜像源 set registry https://registry.npm.taobao.org npm config get registr4.2. 修改华为云镜像源 npm config set registry https://mirrors.huaweicl…...

谷歌浏览器插件
项目中有时候会用到插件 sync-cookie-extension1.0.0:开发环境同步测试 cookie 至 localhost,便于本地请求服务携带 cookie 参考地址:https://juejin.cn/post/7139354571712757767 里面有源码下载下来,加在到扩展即可使用FeHelp…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...

golang循环变量捕获问题
在 Go 语言中,当在循环中启动协程(goroutine)时,如果在协程闭包中直接引用循环变量,可能会遇到一个常见的陷阱 - 循环变量捕获问题。让我详细解释一下: 问题背景 看这个代码片段: fo…...
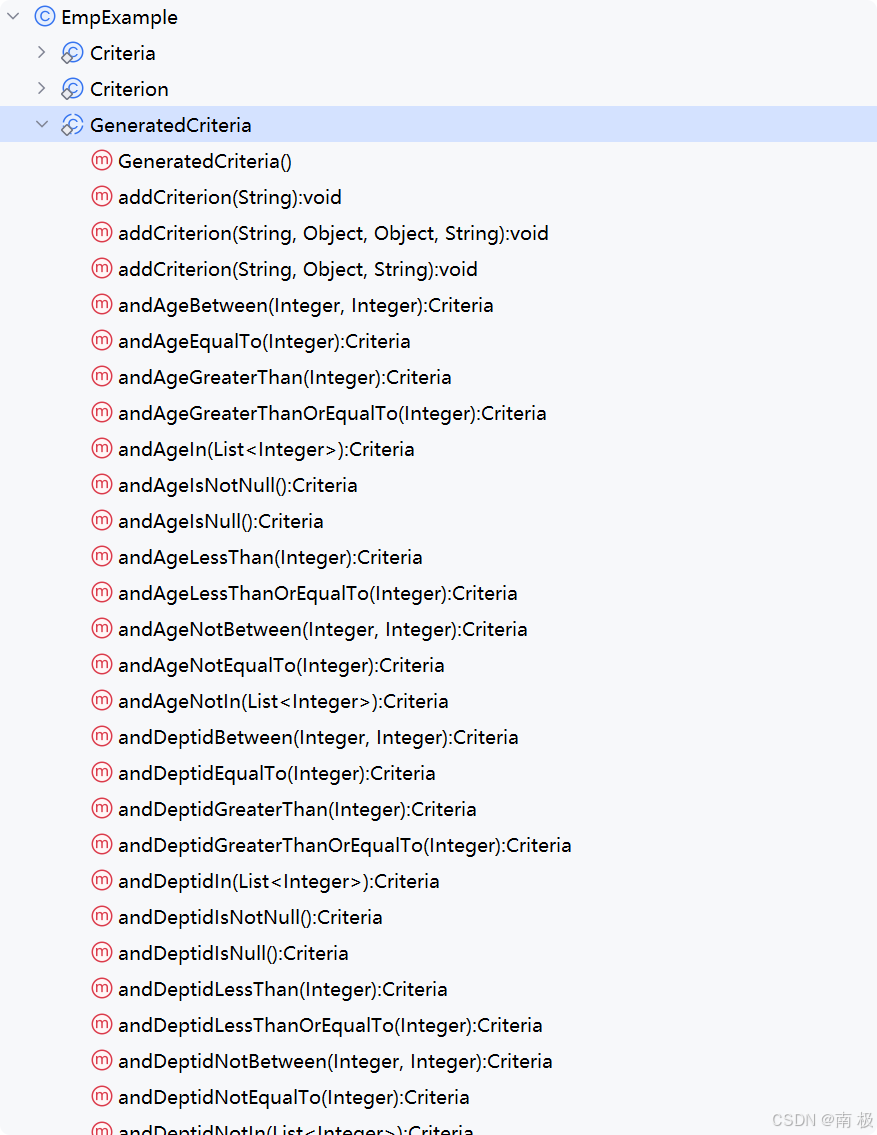
Mybatis逆向工程,动态创建实体类、条件扩展类、Mapper接口、Mapper.xml映射文件
今天呢,博主的学习进度也是步入了Java Mybatis 框架,目前正在逐步杨帆旗航。 那么接下来就给大家出一期有关 Mybatis 逆向工程的教学,希望能对大家有所帮助,也特别欢迎大家指点不足之处,小生很乐意接受正确的建议&…...
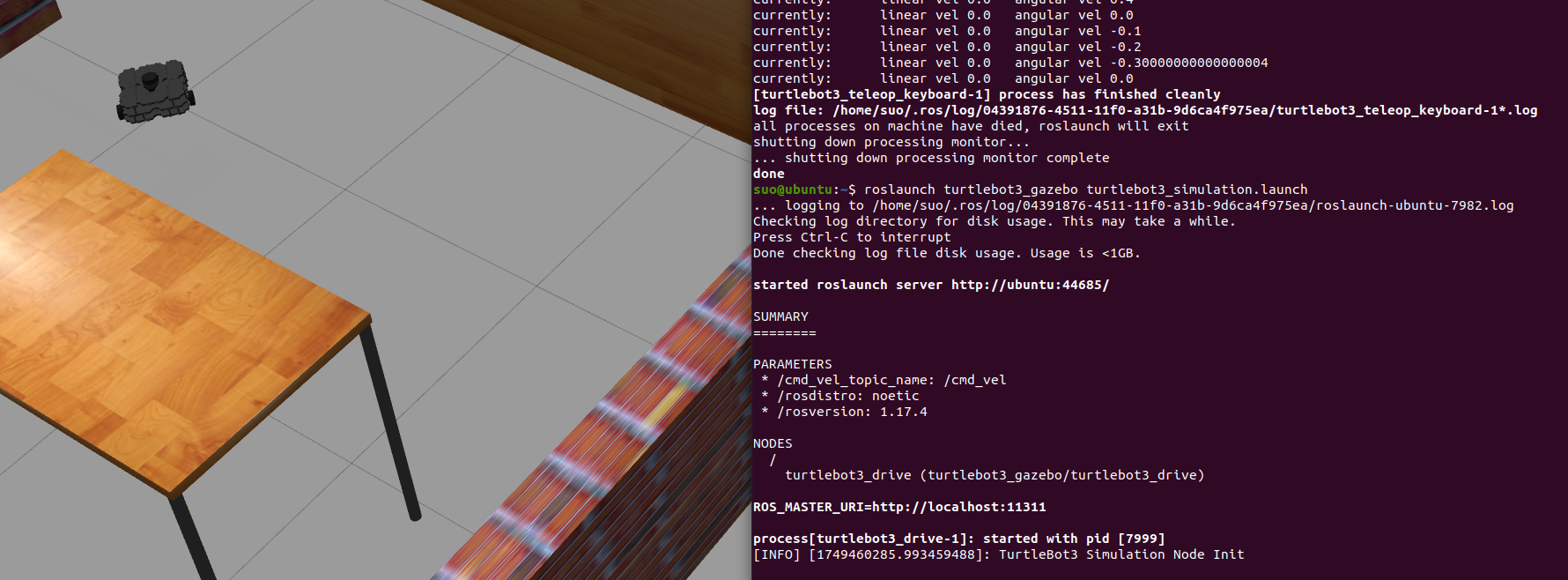
基于TurtleBot3在Gazebo地图实现机器人远程控制
1. TurtleBot3环境配置 # 下载TurtleBot3核心包 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3.git git clone -b noetic https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone -b noetic-dev…...
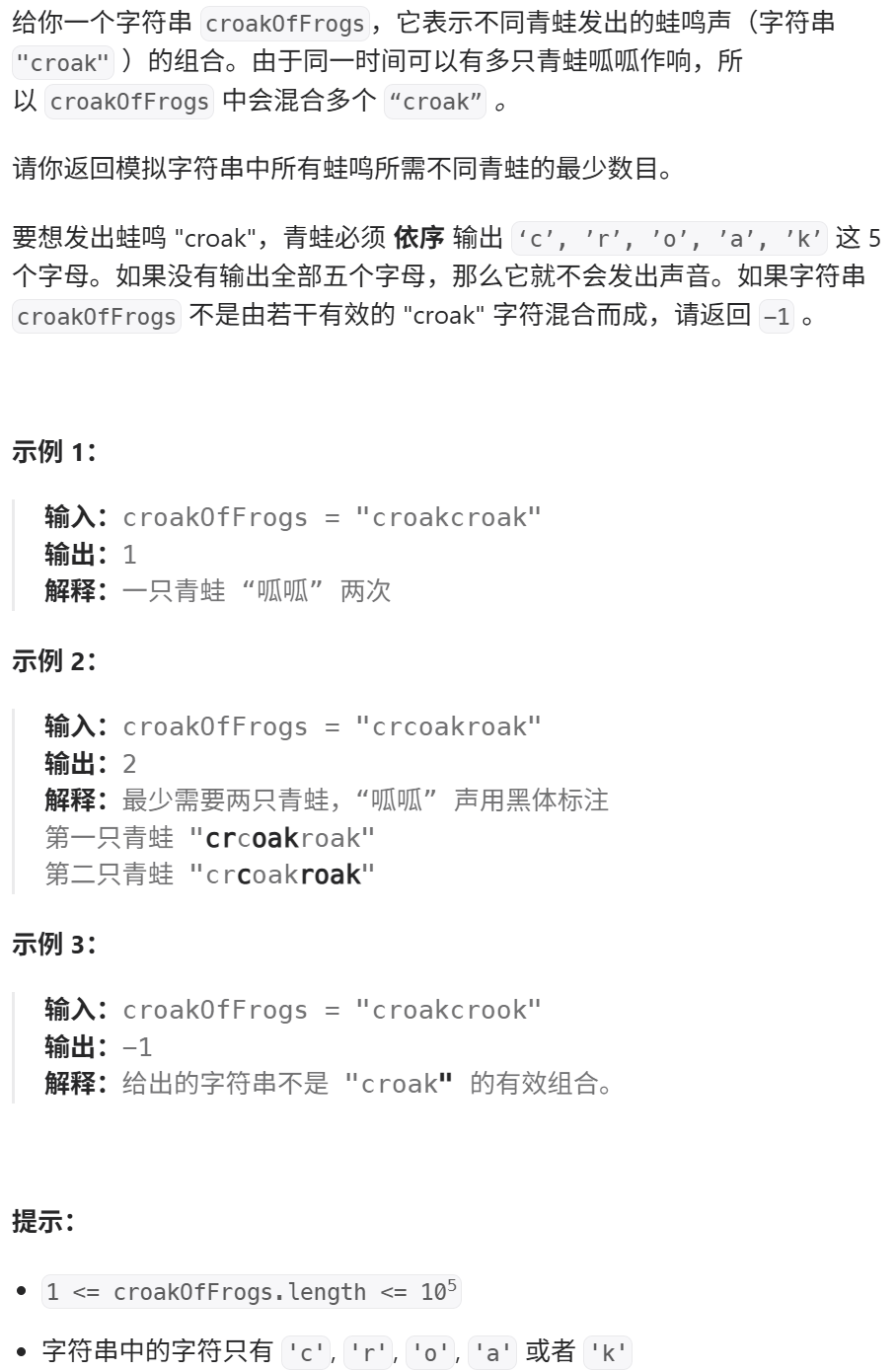
算法:模拟
1.替换所有的问号 1576. 替换所有的问号 - 力扣(LeetCode) 遍历字符串:通过外层循环逐一检查每个字符。遇到 ? 时处理: 内层循环遍历小写字母(a 到 z)。对每个字母检查是否满足: 与…...

省略号和可变参数模板
本文主要介绍如何展开可变参数的参数包 1.C语言的va_list展开可变参数 #include <iostream> #include <cstdarg>void printNumbers(int count, ...) {// 声明va_list类型的变量va_list args;// 使用va_start将可变参数写入变量argsva_start(args, count);for (in…...

Ubuntu Cursor升级成v1.0
0. 当前版本低 使用当前 Cursor v0.50时 GitHub Copilot Chat 打不开,快捷键也不好用,当看到 Cursor 升级后,还是蛮高兴的 1. 下载 Cursor 下载地址:https://www.cursor.com/cn/downloads 点击下载 Linux (x64) ,…...

libfmt: 现代C++的格式化工具库介绍与酷炫功能
libfmt: 现代C的格式化工具库介绍与酷炫功能 libfmt 是一个开源的C格式化库,提供了高效、安全的文本格式化功能,是C20中引入的std::format的基础实现。它比传统的printf和iostream更安全、更灵活、性能更好。 基本介绍 主要特点 类型安全:…...

Python 训练营打卡 Day 47
注意力热力图可视化 在day 46代码的基础上,对比不同卷积层热力图可视化的结果 import torch import torch.nn as nn import torch.optim as optim from torchvision import datasets, transforms from torch.utils.data import DataLoader import matplotlib.pypl…...