【ROS学习笔记5】服务通信
【ROS学习笔记5】服务通信
文章目录
- 【ROS学习笔记5】服务通信
- 前言
- 一、服务通信的理论模型
- 二、服务通信自定义srv
- 三、服务通信自定义srv的Cpp实现
- 四、服务通信自定义srv的Python实现
- 五、Reference
写在前面,本系列笔记参考的是AutoLabor的教程,具体项目地址在 这里
前言
服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制,也即:一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。
概念
以请求响应的方式实现不同节点之间的数据交互的通信模式
作用
用于偶然、对实时性有需求、有一定逻辑处理需求的数据传输场景
案例
实现两个数字的求和,客户端节点,运行会向服务器发送两个数字,服务器端节点接收两个数字求和并将结果响应给客户端
一、服务通信的理论模型
服务通信较之于话题通信更为简单,理论模型如下图所示,该模型中涉及三个角色:
- ROS Master (管理者)
- Server (服务端)
- Client (客户端)
ROS Master负责保管Server与Client注册的信息,并匹配话题相同的Server和Client,帮助Server与Client建立连接,建立连接后,Client发送请求消息,Server返回响应信息。
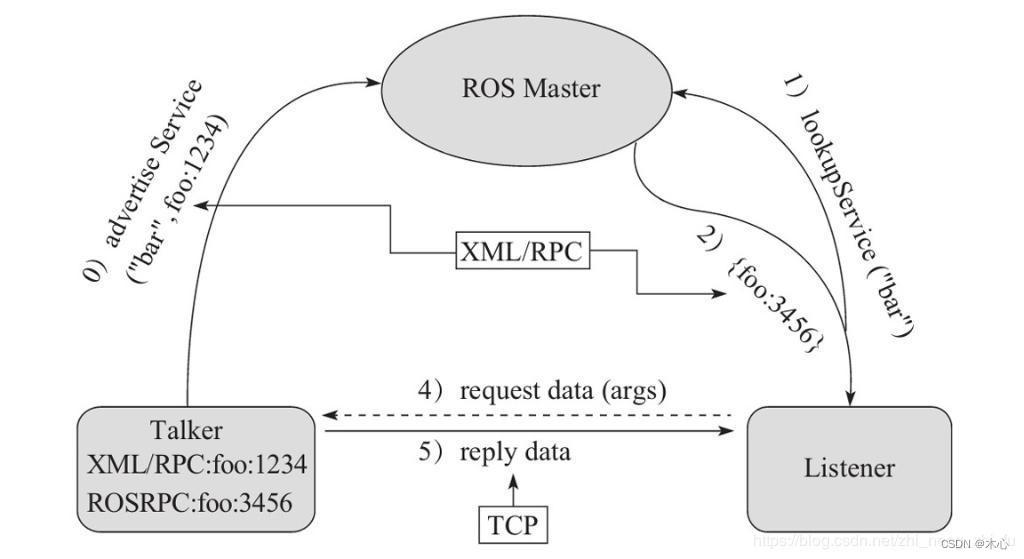
整个流程由以下步骤实现:
0.Server注册
Server 启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含提供的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Client注册
Client 启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要请求的服务的名称。ROS Master 会将节点的注册信息加入到注册表中
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Server和 Client,并通过 RPC 向 Client 发送 Server 的 TCP 地址信息。
3.Client发送请求
Client 根据步骤2 响应的信息,使用 TCP 与 Server 建立网络连接,并发送请求数据。
4.Server发送响应
Server 接收、解析请求的数据,并产生响应结果返回给 Client。
二、服务通信自定义srv
需求
服务通信中,客户端提交两个整数至服务端,服务端求和并响应结果到客户端,请创建服务器与客户端通信的数据载体
流程
srv文件内的可用数据类型与msg文件一致,且定义srv实现流程与自定义msg实现流程类似:
- 按照固定格式创建srv文件
- 编辑配置文件
- 编译生成中间文件
1、定义srv文件
服务通信中,数据分为两部分,请求与响应,在srv文件中请求和响应使用---进行分割,具体实现如下:
功能包下新建srv目录,添加xxx.srv文件,内容:
# 客户端请求时发送的两个数字
int32 num1
int32 num2
---
# 服务器响应发送的数据
int32 sum
2、编辑配置文件
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend><exec_depend>message_runtime</exec_depend><!-- exce_depend 以前对应的是 run_depend 现在非法-->
CMakeLists.txt编辑srv相关配置
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generation
)
# 需要加入 message_generation,必须有 std_msgs
add_service_files(FILESAddInts.srv
)
generate_messages(DEPENDENCIESstd_msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES plumbing_server_clientCATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
注意: 官网没有在 catkin_package 中配置 message_runtime,经测试配置也可以
3、编译
编译后的中间文件查看:
C++ 需要调用的中间文件(…/工作空间/devel/include/包名/xxx.h)
Python 需要调用的中间文件(…/工作空间/devel/lib/python3/dist-packages/包名/srv)
后续调用相关 srv 时,是从这些中间文件调用的
三、服务通信自定义srv的Cpp实现
分析:
在模型实现中,ROS Master不需要再实现,而连接的建立也已经被封装了,需要关注的点有:
- 服务端
- 客户端
- 数据
流程:
- 编写服务端实现
- 编写客户端实现
- 编辑配置文件
- 编译并执行
0、vscode配置
需要像之前自定义 msg 实现一样配置c_cpp_properies.json 文件,如果以前已经配置且没有变更工作空间,可以忽略,如果需要配置,配置方式与之前相同:
{"configurations": [{"browse": {"databaseFilename": "","limitSymbolsToIncludedHeaders": true},"includePath": ["/opt/ros/noetic/include/**","/usr/include/**","/xxx/yyy工作空间/devel/include/**" //配置 head 文件的路径 ],"name": "ROS","intelliSenseMode": "gcc-x64","compilerPath": "/usr/bin/gcc","cStandard": "c11","cppStandard": "c++17"}],"version": 4
}
1、服务端实现
/*需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析服务器实现:1.包含头文件2.初始化 ROS 节点3.创建 ROS 句柄4.创建 服务 对象5.回调函数处理请求并产生响应6.由于请求有多个,需要调用 ros::spin()*/
#include "ros/ros.h"
#include "demo03_server_client/AddInts.h"// bool 返回值由于标志是否处理成功
bool doReq(demo03_server_client::AddInts::Request& req,demo03_server_client::AddInts::Response& resp){int num1 = req.num1;int num2 = req.num2;ROS_INFO("服务器接收到的请求数据为:num1 = %d, num2 = %d",num1, num2);//逻辑处理if (num1 < 0 || num2 < 0){ROS_ERROR("提交的数据异常:数据不可以为负数");return false;}//如果没有异常,那么相加并将结果赋值给 respresp.sum = num1 + num2;return true;}int main(int argc, char *argv[])
{setlocale(LC_ALL,"");// 2.初始化 ROS 节点ros::init(argc,argv,"AddInts_Server");// 3.创建 ROS 句柄ros::NodeHandle nh;// 4.创建 服务 对象ros::ServiceServer server = nh.advertiseService("AddInts",doReq);ROS_INFO("服务已经启动....");// 5.回调函数处理请求并产生响应// 6.由于请求有多个,需要调用 ros::spin()ros::spin();return 0;
}
2、客户端实现
/*需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析服务器实现:1.包含头文件2.初始化 ROS 节点3.创建 ROS 句柄4.创建 客户端 对象5.请求服务,接收响应实现参数的动态提交:1.格式: rosrun xxxx xxxx 12 342.节点执行时,需要获取命令中的参数,并组织缩进request*/
// 1.包含头文件
#include "ros/ros.h"
#include "demo03_server_client/AddInts.h"int main(int argc, char *argv[])
{setlocale(LC_ALL,"");// 调用时动态传值,如果通过 launch 的 args 传参,需要传递的参数个数 +3if (argc != 3)// if (argc != 5)//launch 传参(0-文件路径 1传入的参数 2传入的参数 3节点名称 4日志路径){ROS_ERROR("请提交两个整数");return 1;}// 2.初始化 ROS 节点ros::init(argc,argv,"AddInts_Client");// 3.创建 ROS 句柄ros::NodeHandle nh;// 4.创建 客户端 对象ros::ServiceClient client = nh.serviceClient<demo03_server_client::AddInts>("AddInts");//等待服务启动成功//方式1ros::service::waitForService("AddInts");//方式2// client.waitForExistence();// 5.组织请求数据demo03_server_client::AddInts ai;ai.request.num1 = atoi(argv[1]);ai.request.num2 = atoi(argv[2]);// 6.发送请求,返回 bool 值,标记是否成功bool flag = client.call(ai);// 7.处理响应if (flag){ROS_INFO("请求正常处理,响应结果:%d",ai.response.sum);}else{ROS_ERROR("请求处理失败....");return 1;}return 0;
}
3、配置CMakeLists.txt
add_executable(AddInts_Server src/AddInts_Server.cpp)
add_executable(AddInts_Client src/AddInts_Client.cpp)add_dependencies(AddInts_Server ${PROJECT_NAME}_gencpp)
add_dependencies(AddInts_Client ${PROJECT_NAME}_gencpp)target_link_libraries(AddInts_Server${catkin_LIBRARIES}
)
target_link_libraries(AddInts_Client${catkin_LIBRARIES}
)
4、执行
流程:
- 需要先启动服务:
rosrun 包名 服务名- 然后再调用客户端:
rosrun 包名 客户端 参数1 参数2
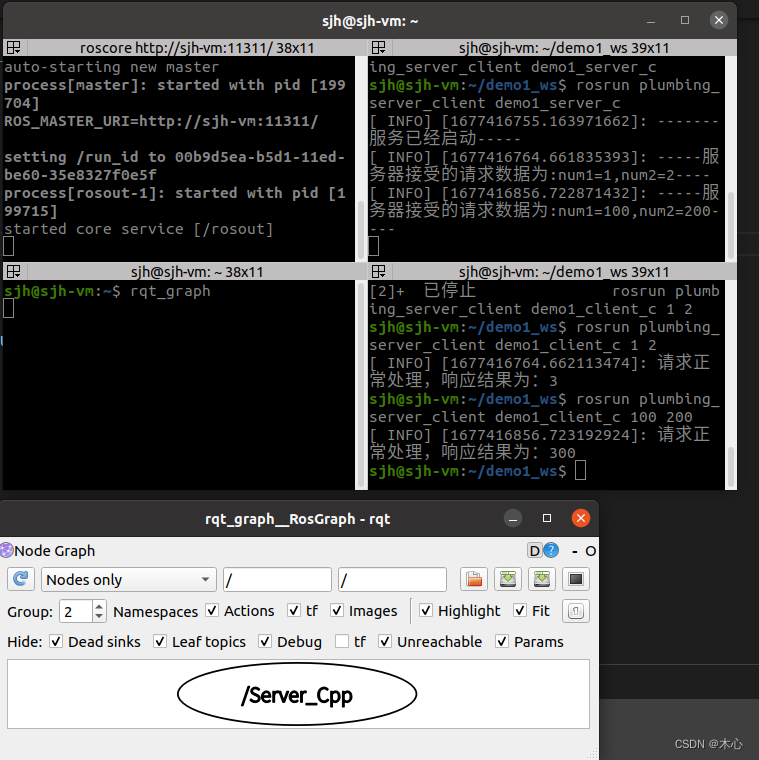
结果:
会根据提交的数据响应相加后的结果
注意:
如果先启动客户端,那么会导致运行失败
优化:
在客户端发送请求前添加:client.waitForExistence();或者ros::service::waitForService("AddInts");,这是一个阻塞函数,只有服务启动成功后才会继续执行,此处可以使用launch文件进行优化,但是需要注意args传参的特点
最后实现的效果如下:
四、服务通信自定义srv的Python实现
流程:
- 编写服务端实现
- 编写客户端实现
- 为Python文件添加可执行权限
- 编辑配置文件
- 编译并执行
0、vscode配置
需要像之前自定义 msg 实现一样配置settings.json 文件,如果以前已经配置且没有变更工作空间,可以忽略,如果需要配置,配置方式与之前相同:
{"python.autoComplete.extraPaths": ["/opt/ros/noetic/lib/python3/dist-packages",]
}
1、服务端
#! /usr/bin/env python
"""需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析服务器端实现:1.导包2.初始化 ROS 节点3.创建服务对象4.回调函数处理请求并产生响应5.spin 函数"""
# 1.导包
import rospy
from demo03_server_client.srv import AddInts,AddIntsRequest,AddIntsResponse
# 回调函数的参数是请求对象,返回值是响应对象
def doReq(req):# 解析提交的数据sum = req.num1 + req.num2rospy.loginfo("提交的数据:num1 = %d, num2 = %d, sum = %d",req.num1, req.num2, sum)# 创建响应对象,赋值并返回# resp = AddIntsResponse()# resp.sum = sumresp = AddIntsResponse(sum)return respif __name__ == "__main__":# 2.初始化 ROS 节点rospy.init_node("addints_server_p")# 3.创建服务对象server = rospy.Service("AddInts",AddInts,doReq)# 4.回调函数处理请求并产生响应# 5.spin 函数rospy.spin()
2、客户端
#! /usr/bin/env python"""需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析客户端实现:1.导包2.初始化 ROS 节点3.创建请求对象4.发送请求5.接收并处理响应优化:加入数据的动态获取"""
#1.导包
import rospy
from demo03_server_client.srv import *
import sysif __name__ == "__main__":#优化实现if len(sys.argv) != 3:rospy.logerr("请正确提交参数")sys.exit(1)# 2.初始化 ROS 节点rospy.init_node("AddInts_Client_p")# 3.创建请求对象client = rospy.ServiceProxy("AddInts",AddInts)# 请求前,等待服务已经就绪# 方式1:# rospy.wait_for_service("AddInts")# 方式2client.wait_for_service()# 4.发送请求,接收并处理响应# 方式1# resp = client(3,4)# 方式2# resp = client(AddIntsRequest(1,5))# 方式3req = AddIntsRequest()# req.num1 = 100# req.num2 = 200 #优化req.num1 = int(sys.argv[1])req.num2 = int(sys.argv[2]) resp = client.call(req)rospy.loginfo("响应结果:%d",resp.sum)
3、设置权限
终端进入scripts执行
chmod +x *.py
4、配置CMakeLists.txt
catkin_install_python(PROGRAMSscripts/AddInts_Server_p.py scripts/AddInts_Client_p.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
5、执行
流程:
- 需要先启动服务:
rosrun 包名 服务- 然后再调用客户端:
rosrun 包名 客户端 参数1 参数2
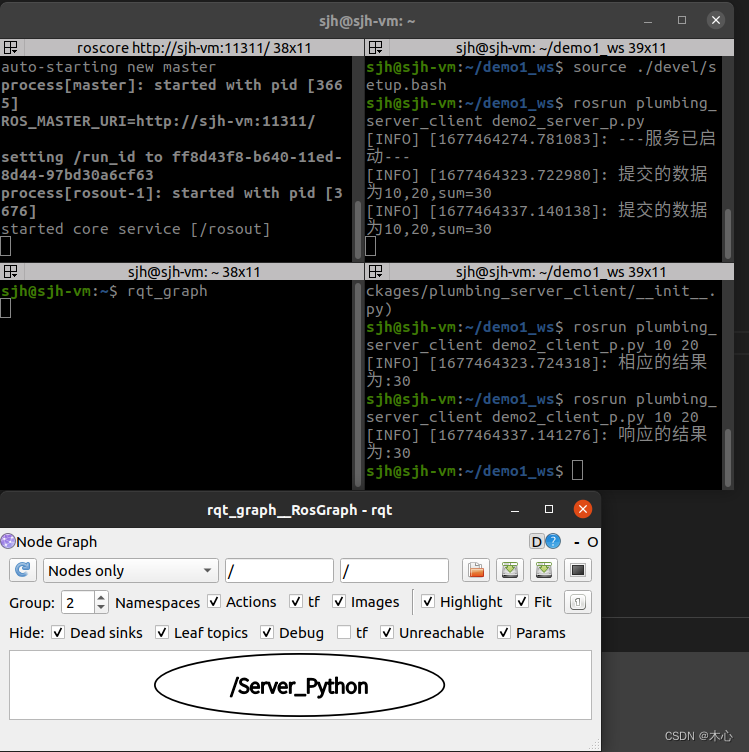
结果:
会根据提交的参数响应相加后的结果
一个示例的结果:
五、Reference
http://www.autolabor.com.cn/book/ROSTutorials/di-2-zhang-ros-jia-gou-she-ji/23-fu-wu-tong-xin/222-fu-wu-tong-xin-zi-ding-yi-srv.html
相关文章:

【ROS学习笔记5】服务通信
【ROS学习笔记5】服务通信 文章目录【ROS学习笔记5】服务通信前言一、服务通信的理论模型二、服务通信自定义srv三、服务通信自定义srv的Cpp实现四、服务通信自定义srv的Python实现五、Reference写在前面,本系列笔记参考的是AutoLabor的教程,具体项目地址…...
“华为杯”研究生数学建模竞赛2006年-【华为杯】A题:Ad Hoc 网络中的区域划分和资源分配问题(附获奖论文)
赛题描述 Ad Hoc网络是当前网络和通信技术研究的热点之一,对于诸如军队和在野外作业的大型公司和集团来说,Ad Hoc网络有着无需基站、无需特定交换和路由节点、随机组建、灵活接入、移动方便等特点,因而具有极大的吸引力。 在Ad Hoc网络中,节点之间的通信均通过无线传输来完…...

编写第一个JAVA程序,常见踩坑记录
编写第一个JAVA程序 预备环境 电脑需要安装JDK 及 配置环境变量打开cmd 输入java -version 能运行在说 创建工程 创建文件夹javaCode(随意叫…) 创建文件Hello.java 编写代码 public class Hello{public static void main(String[] args){System.out.print("hello wo…...

求职陷阱:Lazarus组织以日本瑞穗銀行等招聘信息为诱饵的攻击活动分析
概述 Lazarus组织是疑似具有东北亚背景的APT组织,奇安信威胁情报中心内部追踪编号为APT-Q-1,因2014年攻击索尼影业开始受到广泛关注,其攻击活动最早可追溯到2007年。该组织早期主要针对其他国家政府机构,以窃取敏感情报为目的&am…...

【C语言每日一题】判断字符串旋转结果(附加字符串左旋详解)
【C语言每日一题】—— 判断字符串旋转结果😎😎😎 目录 💡前言🌞: 💛字符串左旋题目💛 💪 解题思路的分享💪 😊题目源码的分享…...

SpringSecurity+JWT+Redis进行用户鉴权和接口权限的控制
系统的登录,都做些什么?用户访问登录页时:会发起一个获取图片验证码的请求,后端先生成一个uuid代表此次的验证码,接着生成 "ab?答案" 的表达式,将前面的内容转换成流生成图片,后面的答案则存储到…...

七大排序(Java)
目录 一、插入排序 1. 直接插入排序 2. 希尔排序 二、选择排序 1. 直接选择排序 2. 堆排序 三、交换排序 1. 冒泡排序 2. 快速排序 四、归并排序 五、总结 一、插入排序 1. 直接插入排序 抓一张牌,在有序的牌中,找到合适的位置并且插入。 时间…...

分享一些可以快速掌握python语法的小技巧
下面是我总结的一些有助于快速掌握 Python 语法的小技巧,欢迎一起交流。 注释:在代码中添加注释可以帮助你和其他人理解代码的目的和功能。在 Python 中,使用 # 符号来添加单行注释,使用三引号 """ 或 来添加多行…...
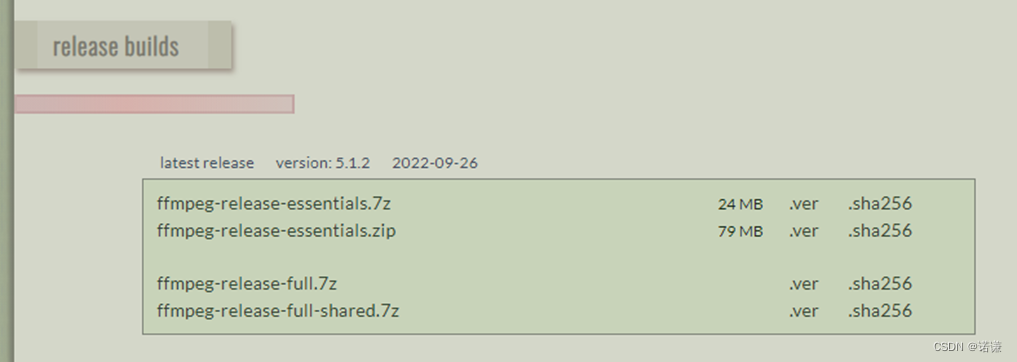
1.FFmpeg-音视频基础
专栏介绍基于最新的FFmpeg5.1.2版本讲解学习, 跟随博主一起学习ffmpeg: 本专栏学习流程为: FFmpeg安装、...

Parasoft的自动化测试平台到底强在哪?
在如今产品迭代如此之快的大背景下,软件测试这项工作越来越被大家所重视,但是通常情况下大家都是选择在产品上线前再去做测试,这个时候就会面临很多麻烦和挑战。首先,产品已经开发好之后,体量比较大,要从哪…...
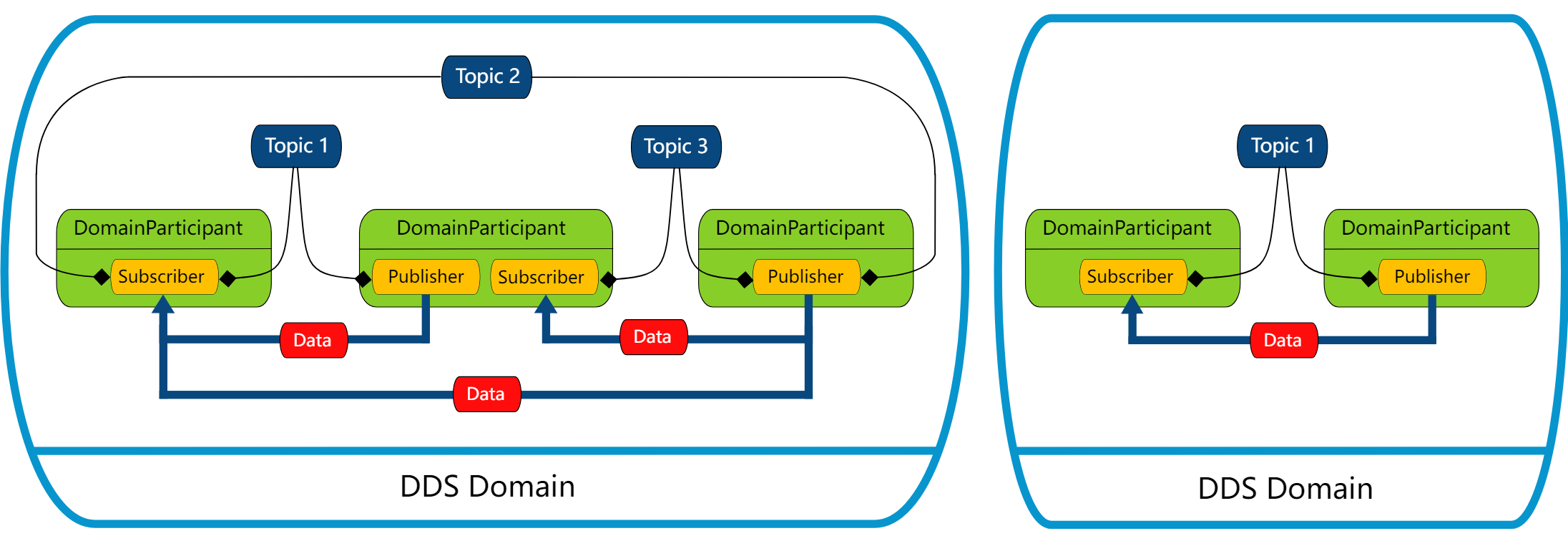
FastDDS-0.简介
FastDDS简介 eProsima Fast DDS 是 DDS (Data Distribution Service) 协议的一个C语言实现版本,该协议由 Object Management Group (OMG) 组织定义。 eProsima Fast DDS 库既提供了一个应用编程接口(API),又提供了一种通信协议&a…...

Flutter入门进阶之旅 -开源Flutter项目
开源Flutter项目 该项目为纯flutter端项目,采用aar方式寄生在原生APP中,作为APP中的一个独立模块 在业务逻辑上做到与原生APP完全隔离,Flutter端开发者,可完全不用关注原生端的业务模块 两端开发彼此业务隔离,缩小了对…...

Opencv项目实战:21 美国ASL手势识别
0、项目介绍 首先,我可以保证在这里,你并不需要多么了解深的机器学习算法,我的初衷是通过本项目,激发大家学习机器学习的动力。选择这种手势原因是因为只有24个字母,你的电脑足以带的动,虽然我只训练A、B、…...
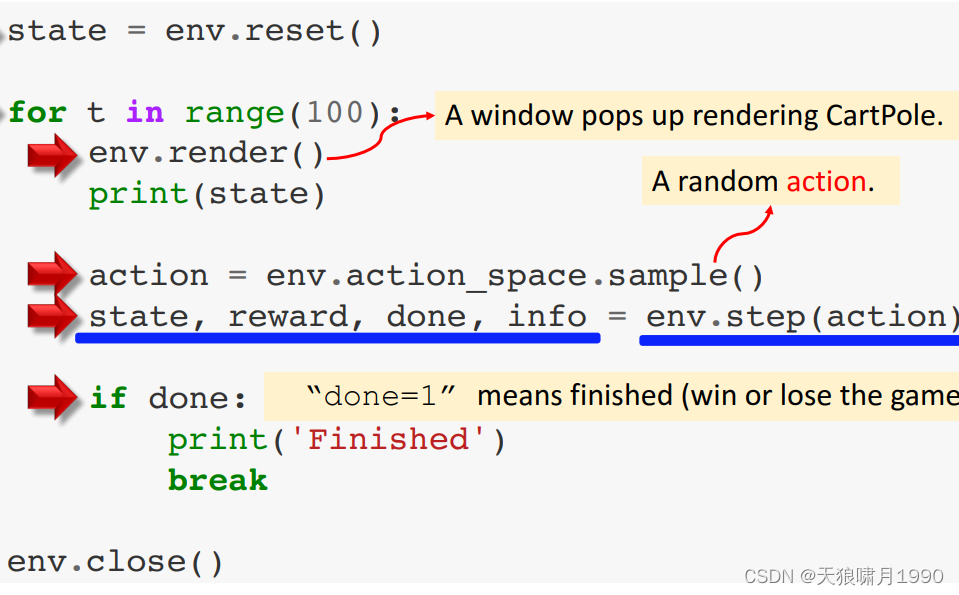
强化学习RL 01: Reinforcement Learning 基础
目录 RL理解要点 1. RL数学基础 1.1 Random Variable 随机变量 1.2 概率密度函数 Probability Density Function(PDF) 1.3 期望 Expectation 1.4 随机抽样 Random Sampling 2. RL术语 Terminologies 2.1 agent、state 和 action 2.2 策略 policy π 2.3 奖励 reward …...

C语言之练习题合集
💗 💗 博客:小怡同学 💗 💗 个人简介:编程小萌新 💗 💗 如果博客对大家有用的话,请点赞关注再收藏 🌞 文章目录leetcode 题号:728. 自除数leetcode 题号:238.…...
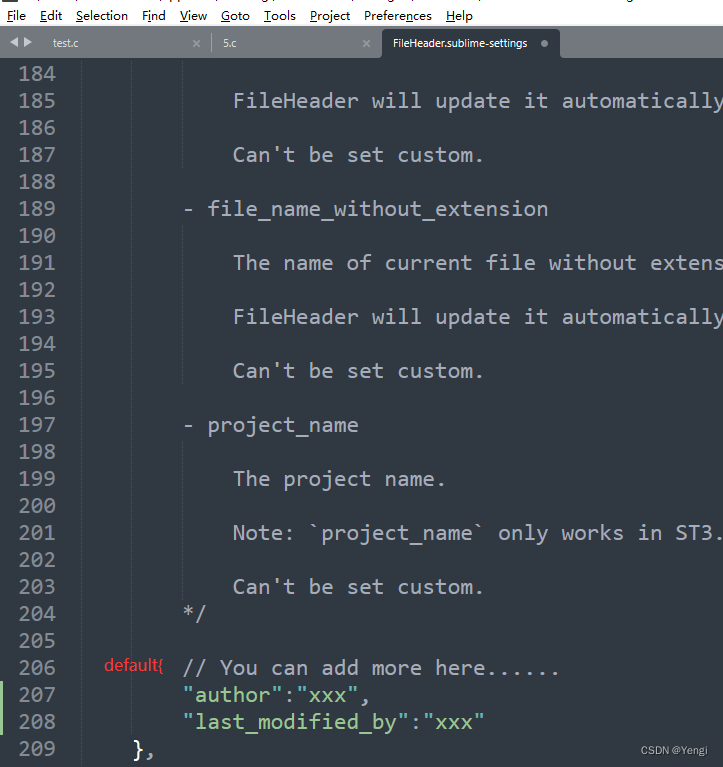
sublimeText3新建文件自动添加注释头
参考: https://github.com/shiyanhui/FileHeader/blob/master/README.rst https://packagecontrol.io/packages/FileHeader https://github.com/shiyanhui/FileHeader fileheader:https://codeload.github.com/shiyanhui/FileHeader/zip/refs/heads/m…...

AndroidStudio打包HBuilderX的H5+项目为安卓App【一次过,无任何异常报错】
目录 1.查看HBuilderX的版本号 2.下载Dcloud上对应的安卓SDK 3.下载完安卓SDK后,我们解压它,注意不要放在任何有中文组成的文件夹中【是否有中文决定于你鼠标单击上面路径后,第一张图还没鼠标单击,第二张已鼠标单击,…...

【Linux】进程概念
目录 一、基本概念 二、查看进程 三、系统调用获取进程标示符 1、获取自己的PID 2、获取父进程的PID 四、创建进程 1、初识fork 2、使用fork的方式 五、进程状态 1、阻塞 2、挂起 3、R状态 4、S状态 5、D状态 6、T状态 6.1、kill指令 6.2、暂停进程与继续进程 …...

使用pyinstaller库打包exe时显示KeyError怎么办
PyInstaller是一个Python库,用于将Python应用程序转换为独立的可执行文件(executable)文件,支持多平台。它可以将Python解释器、依赖的库和脚本打包成一个单独的可执行文件,从而使应用程序可以独立运行,而无…...

k8s新增节点机器,无法拉取和推送镜像的解决方案
1、首先检查配置,查看镜像仓库是否已授权,若无授权,则进行授权。 命令:cat /etc/systemd/system/docker.service.d/docker-options.conf内容如果有这样一句就是已经授权,如果没有,就需要把这句加进去&…...
如何影响你的日常生活?)
从物流仓库到游戏背包:三维装箱问题(3D-BPP)如何影响你的日常生活?
从物流仓库到游戏背包:三维装箱问题如何塑造我们的数字生活 清晨打开手机里的策略游戏,你发现背包格子又不够用了——那些珍贵的装备和药水总是无法完美摆放;周末搬家时,面对满屋的家具和纸箱,你突然意识到小货车可能装…...

嵌入式系统协议兼容性设计与升级优化
嵌入式系统中的协议兼容性设计与升级策略1. 多板系统中的通信协议挑战在现代嵌入式系统设计中,硬件架构往往由多块控制板协同工作构成。这种分布式架构带来了通信协议设计上的特殊挑战,特别是在系统升级和维护阶段。1.1 典型应用场景分析多板系统通常面临…...

AI率过高必看!4大核心方法+5款实用工具,SpeedAI真滴强!
现在各大AI检测机制越来越严格,不管是高校学生写毕业论文、职场人做方案汇报,还是自媒体输出原创内容,“AI检测率超标”都成了最头疼的问题——轻的要反复返工修改,严重的甚至会影响学分认定、项目评审结果。今天给大家整理了一套…...

基于Ai Coding,20天完成一个基于大模型的医学分析系统:Ai体征分析助手
我是一名长期使用C#开发后台服务与数据库的开发者,在短短20天内,独立完成一个跨前后端、贴合医疗健康场景分析的完整系统(Ai体征分析助手)是未曾想过的。得益于AI Coding工具的深度实践与应用和医疗领域大模型的应用,让…...

FPGA DSP48E2实战避坑:为什么你的32x32定点乘法性能上不去?从原理到优化全解析
FPGA DSP48E2实战避坑:为什么你的32x32定点乘法性能上不去?从原理到优化全解析 在FPGA信号处理系统设计中,32x32定点乘法器是构建数字滤波器、FFT核心和矩阵运算的基础模块。许多工程师在使用Xilinx UltraScale系列FPGA的DSP48E2 Slice时&…...

网络安全人才平均年薪 24.09 万,跳槽周期 31 个月,安全工程师现状大曝光!
网络安全作为近两年兴起的热门行业,成了很多就业无门但是想转行的人心中比较向往但是又心存疑惑的行业,毕竟网络安全的发展史比较短,而国内目前网安的环境和市场情况还不算为大众所知晓,所以到底零基础转行入门网络安全之后&#…...

5分钟搞定输入法词库转换:深蓝词库转换工具全攻略
5分钟搞定输入法词库转换:深蓝词库转换工具全攻略 【免费下载链接】imewlconverter ”深蓝词库转换“ 一款开源免费的输入法词库转换程序 项目地址: https://gitcode.com/gh_mirrors/im/imewlconverter 还在为输入法词库迁移发愁?试试这款免费神器…...

数字孪生城市入门:SuperMap和MapGIS怎么选?聊聊地下管线三维建模的两种技术路线
数字孪生城市技术选型:SuperMap与MapGIS地下管线建模深度对比 当城市开始拥有自己的"数字双胞胎",地下管线作为看不见的"生命线"如何被精准复刻到虚拟世界?这个问题正困扰着越来越多的智慧城市项目决策者。在数字孪生城市…...

用OpenCV和C++实现无人机影像自动匹配:从Moravec特征点到NCC相关系数的完整流程
无人机影像智能匹配实战:基于OpenCV的Moravec与NCC全流程解析 当无人机掠过一片待测区域时,它每秒能捕获数十张高分辨率影像。这些影像蕴含着丰富的地理信息,但如何让这些二维图片"对话",构建出三维世界的数字孪生&…...

别再乱刷GMS包了!给Android TV/盒子集成Google服务,这份保姆级避坑指南请收好
Android TV/盒子集成Google服务的终极避坑指南 1. 为什么你的Android TV需要GMS? 对于Android TV和电视盒子用户来说,Google移动服务(GMS)就像是一把打开完整智能电视体验的钥匙。没有它,你不仅无法访问Google Play商店,还会错过许…...