Verilog 学习第五节(串口接收部分)
小梅哥串口部分学习part2
- 串口通信接收原理
- 串口通信接收程序设计与调试
- 巧用位操作优化串口接收逻辑设计
- 串口接收模块的项目应用案例
串口通信接收原理
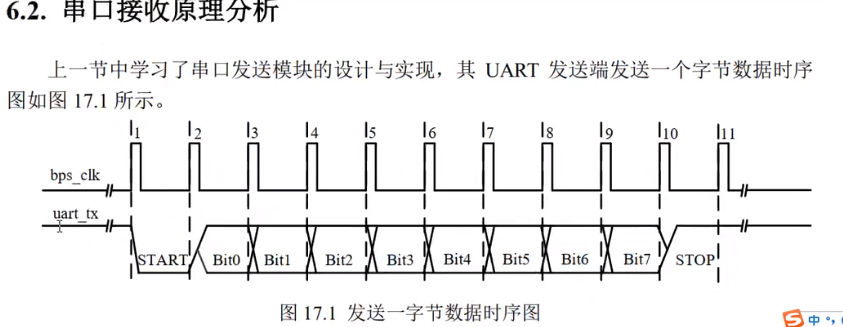
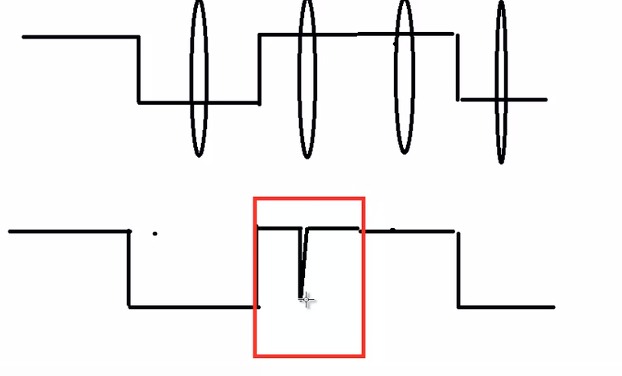
在采样的时候没有必要一直判断一个clk内全部都是高/低电平,如果采用直接对中间点进行判断的话,很有可能出现中间点恰好电力失常等等,因此可以采集多次样本,其中样本数据频率高的值就是该段电平的值
**基本原理:**采样
**技巧是:**一位数据采多次,统计得到高电平出现的次数,次数多的就是该位的电平值。采样8次,0,1,2,3低电平,4,5,6,7为高电平
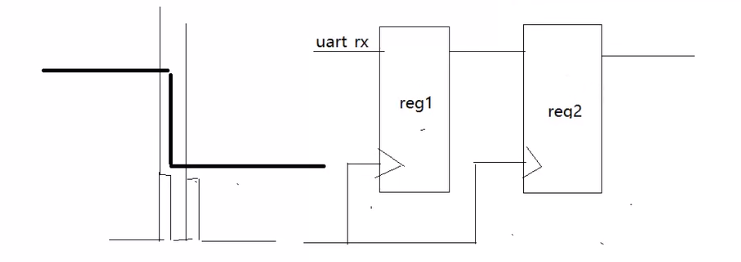
**起始位检测:**通过边沿检测电路
串口通信接收程序设计与调试
波特率是指串口通信中,单位时间传输的二进制位数eg:115200对应的就是1s传输115200位,即传输一位需要1000000000/115200,若进行采样频率为波特率的16倍则需要再除以16对应于每次的采样的时间,由于内部时钟20ns的频率进行变化,所以想要计算对应的采样次数就需要再除以20~
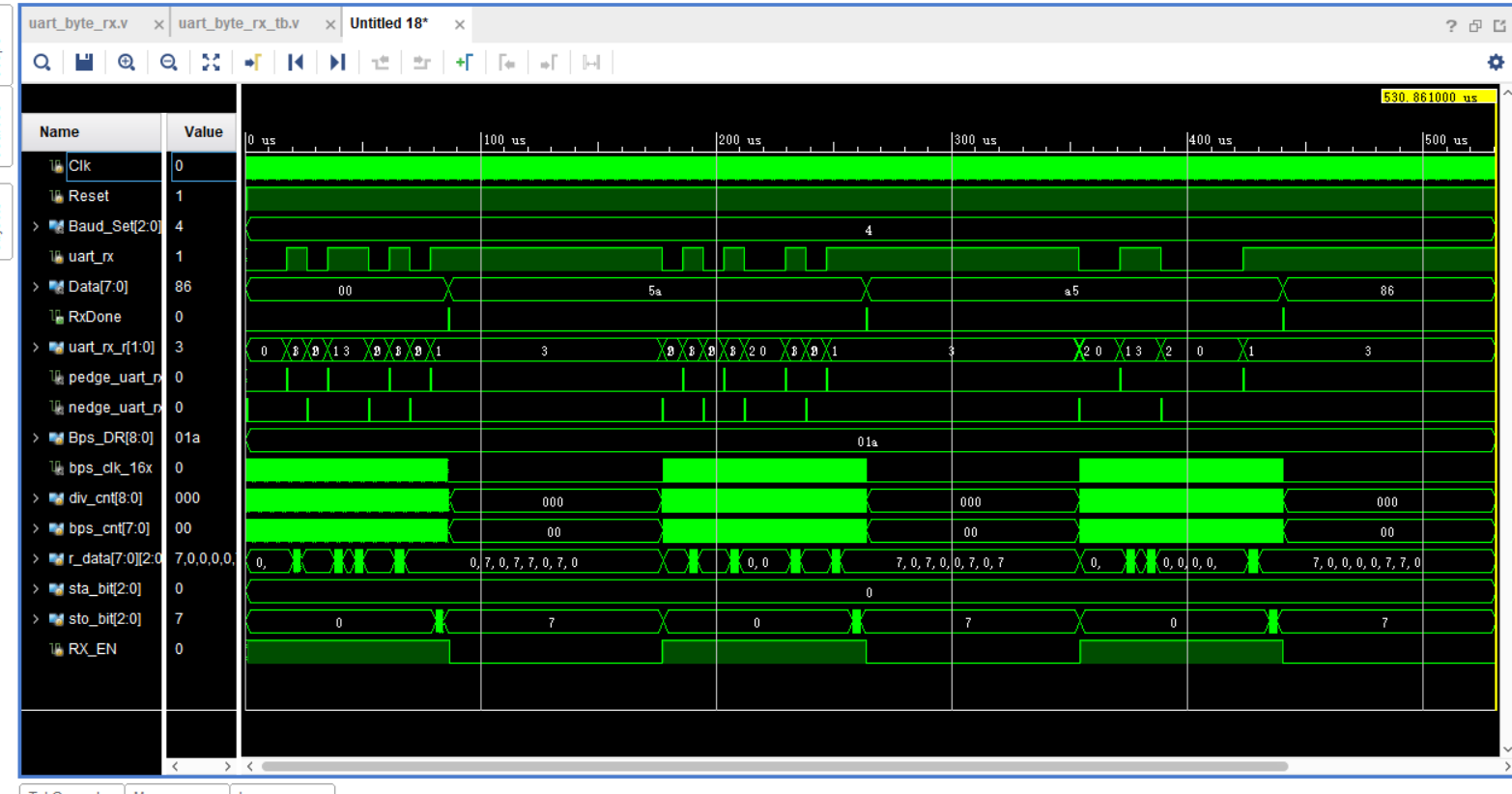
源代码
module uart_byte_rx(input Clk,input Reset,input [2:0]Baud_Set,input uart_rx,output reg[7:0] Data,output reg RxDone);//边沿检测reg [1:0]uart_rx_r;always@(posedge Clk)beginuart_rx_r[0]<=uart_rx;uart_rx_r[1]<=uart_rx_r[0];end//上升沿wire pedge_uart_rx;//assign pedge_uart_rx=((uart_rx_r[0]==0)&&(uart_rx_r[1]==1));assign pedge_uart_rx=(uart_rx_r==2'b01);//下降沿wire nedge_uart_rx;//assign pedge_uart_rx=((uart_rx_r[0]==1)&&(uart_rx_r[1]==0));assign nedge_uart_rx=(uart_rx_r==2'b10);//采样需要计数的位数reg [8:0] Bps_DR;always@(*)case(Baud_Set)0:Bps_DR = 1000000000/9600/16/20 - 1;1:Bps_DR = 1000000000/19200/16/20 - 1;2:Bps_DR = 1000000000/38400/16/20 - 1;3:Bps_DR = 1000000000/57600/16/20 - 1;4:Bps_DR = 1000000000/115200/16/20 - 1;default:Bps_DR = 1000000000/9600/16/20 - 1;endcasewire bps_clk_16x;assign bps_clk_16x = (div_cnt == Bps_DR / 2); reg [8:0]div_cnt;always@(posedge Clk or negedge Reset)beginif(!Reset)div_cnt<=0;else if(RX_EN)beginif(div_cnt==Bps_DR)div_cnt<=0;elsediv_cnt<=div_cnt+1;endelsediv_cnt<=0; end//每位被分成16次频率采样,所以一共检测10位则需要160位reg [7:0]bps_cnt;always@(posedge Clk or negedge Reset)beginif(!Reset)bps_cnt<=0;else if(RX_EN)beginif(bps_clk_16x)beginif(bps_cnt==159)bps_cnt<=0;elsebps_cnt<=bps_cnt+1;endelsebps_cnt<=bps_cnt; endelsebps_cnt<=0;endreg[2:0]r_data[7:0];reg [2:0]sta_bit;reg [2:0]sto_bit;reg RX_EN; always@(posedge Clk or negedge Reset)beginif(!Reset)RX_EN<=0;else if(nedge_uart_rx)RX_EN<=1;else if(RxDone || (sta_bit >= 4))RX_EN<=0;end//用于对数据赋值 always@(posedge Clk or negedge Reset)beginif(!Reset)beginsta_bit<=0;sto_bit<=0;r_data[0]<=0;r_data[1]<=0;r_data[2]<=0;r_data[3]<=0;r_data[4]<=0;r_data[5]<=0;r_data[6]<=0;r_data[7]<=0;endelse if(bps_clk_16x)//中间位置取结果16次里面的5,6,7,8,9,10,11次数据begincase(bps_cnt)0:beginsta_bit<=0;sto_bit<=0;r_data[0]<=0;r_data[1]<=0;r_data[2]<=0;r_data[3]<=0;r_data[4]<=0;r_data[5]<=0;r_data[6]<=0;r_data[7]<=0;end5,6,7,8,9,10,11:sta_bit<=sta_bit+uart_rx;21,22,23,24,25,26,27: r_data[0] <= r_data[0] + uart_rx;37,38,39,40,41,42,43: r_data[1] <= r_data[1] + uart_rx;53,54,55,56,57,58,59: r_data[2] <= r_data[2] + uart_rx;69,70,71,72,73,74,75: r_data[3] <= r_data[3] + uart_rx;85,86,87,88,89,90,91: r_data[4] <= r_data[4] + uart_rx;101,102,103,104,105,106,107: r_data[5] <= r_data[5] + uart_rx;117,118,119,120,121,122,123: r_data[6] <= r_data[6] + uart_rx;133,134,135,136,137,138,139: r_data[7] <= r_data[7] + uart_rx;149,150,151,152,153,154,155: sto_bit <= sto_bit + uart_rx;default:;endcaseendendalways@(posedge Clk or negedge Reset)if(!Reset) Data <= 0; else if(bps_clk_16x && (bps_cnt == 159))beginData[0] <= (r_data[0] >= 4)?1'b1:1'b0;Data[1] <= (r_data[1] >= 4)?1'b1:1'b0;Data[2] <= (r_data[2] >= 4)?1'b1:1'b0;Data[3] <= (r_data[3] >= 4)?1'b1:1'b0;Data[4] <= (r_data[4] >= 4)?1'b1:1'b0;Data[5] <= (r_data[5] >= 4)?1'b1:1'b0;Data[6] <= (r_data[6] >= 4)?1'b1:1'b0;Data[7] <= (r_data[7] >= 4)?1'b1:1'b0;end always@(posedge Clk or negedge Reset)beginif(!Reset)RxDone<=0;else if((div_cnt==Bps_DR/2)&&(bps_cnt==159))RxDone<=1;elseRxDone<=0;endendmodule测试模块
`timescale 1ns / 1ns
module uart_byte_rx_tb();reg Clk;reg Reset;wire [2:0]Baud_Set;reg uart_rx;wire[7:0] Data;wire RxDone;assign Baud_Set=4;uart_byte_rx uart_byte_rx(Clk,Reset,Baud_Set,uart_rx,Data,RxDone);initial Clk=0;always #10 Clk=!Clk;initial beginReset=0;uart_rx=1;#201;
// Reset=1;
// uart_tx_byte(8'h54);
// @(posedge RxDone);
// #50000;
// uart_tx_byte(8'h32);
// @(posedge RxDone);
// #50000;
// uart_tx_byte(8'h89);
// @(posedge RxDone);
// #50000;Reset = 1;#200; uart_tx_byte(8'h5a);#90000;uart_tx_byte(8'ha5);#90000;uart_tx_byte(8'h86);#90000;$stop;$stop;endtask uart_tx_byte;input [7:0]tx_data;beginuart_rx=1;#20;uart_rx=0;#8680;uart_rx=tx_data[0];#8680;uart_rx=tx_data[1];#8680;uart_rx=tx_data[2];#8680;uart_rx=tx_data[3];#8680;uart_rx=tx_data[4];#8680;uart_rx=tx_data[5];#8680;uart_rx=tx_data[6];#8680;uart_rx=tx_data[7];#8680;uart_rx=1;#8680;endendtask
endmodule仿真截图
巧用位操作优化串口接收逻辑设计
解释:3’b000 3’b001 3’b010 3’b011 3’b100 3’b101 3’b110 3’b111判断是否大于等于4可以直接对第2位进行判断,为1则大于等于,为0则不大于
always@(posedge Clk or negedge Reset)if(!Reset) Data <= 0; else if(bps_clk_16x && (bps_cnt == 159))beginData[0] <= (r_data[0] >= 4)?1'b1:1'b0;Data[1] <= (r_data[1] >= 4)?1'b1:1'b0;Data[2] <= (r_data[2] >= 4)?1'b1:1'b0;Data[3] <= (r_data[3] >= 4)?1'b1:1'b0;Data[4] <= (r_data[4] >= 4)?1'b1:1'b0;Data[5] <= (r_data[5] >= 4)?1'b1:1'b0;Data[6] <= (r_data[6] >= 4)?1'b1:1'b0;Data[7] <= (r_data[7] >= 4)?1'b1:1'b0;end //可以达到和上面同样的功能
// always@(posedge Clk or negedge Reset)
// if(!Reset)
// Data <= 0;
// else if(bps_clk_16x && (bps_cnt == 159))begin
// Data[0] <= r_data[0][2];
// Data[1] <= r_data[1][2];
// Data[2] <= r_data[2][2];
// Data[3] <= r_data[3][2];
// Data[4] <= r_data[4][2];
// Data[5] <= r_data[5][2];
// Data[6] <= r_data[6][2];
// Data[7] <= r_data[7][2];
// end 串口接收模块的项目应用案例
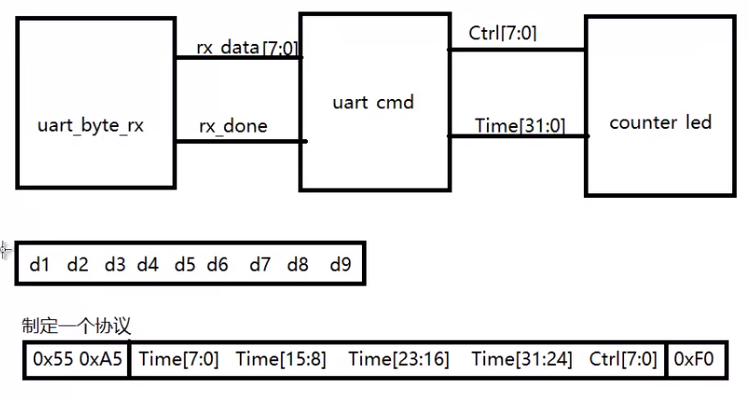
使用串口来控制LED工作状态
题目:使用串口发送指令到FPGA开发板,来控制第7课第4个实验的开发板上的LED灯的工作状态
让LED灯按照指定的亮灭模式亮灭,亮灭模式未知,由用户随机指定。8个变化状态为一个循环,每个变化状态的时间值可以根据不同的应用场景选择
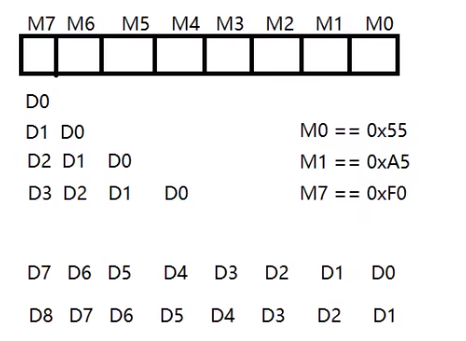
如何使用串口接收8个字节的数据
收获:
1:上板调试时,对于时钟计时问题,最初counter=0,发现不满足,counter就会一直自加,直到加到32位的’hFFFFFFFF’才会清零
在实际板级运行的时候,当我们的time值更新时(25000000),counter的值已经大于该值,所以无法通过计数比较的方式清零,只能一直自加下去,直到32位计满了,溢出清零,然后才能正常的循环计数清零
这里涉及到一种编写技巧判断
if(i>=32)
a=0;
和if(i==32)
a=0;
虽然结界点都是32,但是对于第一种情况可以有效地避免当不满足条件时的及时清零,对于第二种有的时候或许会有些小问题
2:对于reset这种外部模块最好全部都定义成大写,并且统一这样赋值的时候不容易出错,模块内部的变量定义成小写
3:在顶层模块中几乎除了输入输出以外的内部变量都要定义成wire类型,代表内部的连线,输入输出还是采用和以往相同的方法,若底层是reg型,则上层直接定义成output就可,不用再定义成reg,测试文件直接写出wire~
//counter_led_4中
always@(posedge Clk or negedge Reset_n)if(!Reset_n)counter <= 0;else if(counter >= Time - 1)//这里由==改成了>=counter <= 0;elsecounter <= counter + 1'b1;
源代码
module uart_rx_ctrl_led(input Clk,input reset,input uart_rx,output Led);wire [7:0]Ctrl;wire [31:0]Time;wire [7:0]Data;wire RxDone;counter_led_4 counter_led_4(.Clk(Clk),.Reset_n(reset),.Ctrl(Ctrl),.Time(Time),.Led(Led));uart_byte_rx uart_byte_rx(.Clk(Clk),.Reset(reset),.Baud_Set(3'd4),.uart_rx(uart_rx),.Data(Data),.RxDone(RxDone));uart_cmd uart_cmd(.clk(Clk),.reset(reset),.rx_data(Data),.rx_done(RxDone),.ctrl(Ctrl),.time_set(Time));
endmodulemodule counter_led_4(Clk,Reset_n,Ctrl,Time,Led
);input Clk;input Reset_n;input [7:0]Ctrl;input [31:0]Time;output reg Led;reg [31:0]counter;always@(posedge Clk or negedge Reset_n)if(!Reset_n)counter <= 0;else if(counter >= Time - 1)counter <= 0;elsecounter <= counter + 1'b1;reg [2:0]counter2;always@(posedge Clk or negedge Reset_n)if(!Reset_n) counter2 <= 0; else if(counter == Time - 1)counter2 <= counter2 + 1'b1;always@(posedge Clk or negedge Reset_n)if(!Reset_n)Led <= 0;else case(counter2)0:Led <= Ctrl[0];1:Led <= Ctrl[1];2:Led <= Ctrl[2];3:Led <= Ctrl[3];4:Led <= Ctrl[4];5:Led <= Ctrl[5];6:Led <= Ctrl[6];7:Led <= Ctrl[7];default:Led <= Led;endcaseendmodule
module uart_byte_rx(input Clk,input Reset,input [2:0]Baud_Set,input uart_rx,output reg[7:0] Data,output reg RxDone);//边沿检测reg [1:0]uart_rx_r;always@(posedge Clk)beginuart_rx_r[0]<=uart_rx;uart_rx_r[1]<=uart_rx_r[0];end//上升沿wire pedge_uart_rx;//assign pedge_uart_rx=((uart_rx_r[0]==0)&&(uart_rx_r[1]==1));assign pedge_uart_rx=(uart_rx_r==2'b01);//下降沿wire nedge_uart_rx;//assign pedge_uart_rx=((uart_rx_r[0]==1)&&(uart_rx_r[1]==0));assign nedge_uart_rx=(uart_rx_r==2'b10);//采样需要计数的位数reg [8:0] Bps_DR;always@(*)case(Baud_Set)0:Bps_DR = 1000000000/9600/16/20 - 1;1:Bps_DR = 1000000000/19200/16/20 - 1;2:Bps_DR = 1000000000/38400/16/20 - 1;3:Bps_DR = 1000000000/57600/16/20 - 1;4:Bps_DR = 1000000000/115200/16/20 - 1;default:Bps_DR = 1000000000/9600/16/20 - 1;endcasewire bps_clk_16x;assign bps_clk_16x = (div_cnt == Bps_DR / 2); reg [8:0]div_cnt;always@(posedge Clk or negedge Reset)beginif(!Reset)div_cnt<=0;else if(RX_EN)beginif(div_cnt==Bps_DR)div_cnt<=0;elsediv_cnt<=div_cnt+1;endelsediv_cnt<=0; end//每位被分成16次频率采样,所以一共检测10位则需要160位reg [7:0]bps_cnt;always@(posedge Clk or negedge Reset)beginif(!Reset)bps_cnt<=0;else if(RX_EN)beginif(bps_clk_16x)beginif(bps_cnt==159)bps_cnt<=0;elsebps_cnt<=bps_cnt+1;endelsebps_cnt<=bps_cnt; endelsebps_cnt<=0;endreg[2:0]r_data[7:0];reg [2:0]sta_bit;reg [2:0]sto_bit;reg RX_EN; always@(posedge Clk or negedge Reset)beginif(!Reset)RX_EN<=0;else if(nedge_uart_rx)RX_EN<=1;else if(RxDone || (sta_bit >= 4))RX_EN<=0;end//用于对数据赋值 always@(posedge Clk or negedge Reset)beginif(!Reset)beginsta_bit<=0;sto_bit<=0;r_data[0]<=0;r_data[1]<=0;r_data[2]<=0;r_data[3]<=0;r_data[4]<=0;r_data[5]<=0;r_data[6]<=0;r_data[7]<=0;endelse if(bps_clk_16x)//中间位置取结果16次里面的5,6,7,8,9,10,11次数据begincase(bps_cnt)0:beginsta_bit<=0;sto_bit<=0;r_data[0]<=0;r_data[1]<=0;r_data[2]<=0;r_data[3]<=0;r_data[4]<=0;r_data[5]<=0;r_data[6]<=0;r_data[7]<=0;end5,6,7,8,9,10,11:sta_bit<=sta_bit+uart_rx;21,22,23,24,25,26,27: r_data[0] <= r_data[0] + uart_rx;37,38,39,40,41,42,43: r_data[1] <= r_data[1] + uart_rx;53,54,55,56,57,58,59: r_data[2] <= r_data[2] + uart_rx;69,70,71,72,73,74,75: r_data[3] <= r_data[3] + uart_rx;85,86,87,88,89,90,91: r_data[4] <= r_data[4] + uart_rx;101,102,103,104,105,106,107: r_data[5] <= r_data[5] + uart_rx;117,118,119,120,121,122,123: r_data[6] <= r_data[6] + uart_rx;133,134,135,136,137,138,139: r_data[7] <= r_data[7] + uart_rx;149,150,151,152,153,154,155: sto_bit <= sto_bit + uart_rx;default:;endcaseendendalways@(posedge Clk or negedge Reset)if(!Reset) Data <= 0; else if(bps_clk_16x && (bps_cnt == 159))beginData[0] <= (r_data[0] >= 4)?1'b1:1'b0;Data[1] <= (r_data[1] >= 4)?1'b1:1'b0;Data[2] <= (r_data[2] >= 4)?1'b1:1'b0;Data[3] <= (r_data[3] >= 4)?1'b1:1'b0;Data[4] <= (r_data[4] >= 4)?1'b1:1'b0;Data[5] <= (r_data[5] >= 4)?1'b1:1'b0;Data[6] <= (r_data[6] >= 4)?1'b1:1'b0;Data[7] <= (r_data[7] >= 4)?1'b1:1'b0;end //可以达到和上面同样的功能
// always@(posedge Clk or negedge Reset)
// if(!Reset)
// Data <= 0;
// else if(bps_clk_16x && (bps_cnt == 159))begin
// Data[0] <= r_data[0][2];
// Data[1] <= r_data[1][2];
// Data[2] <= r_data[2][2];
// Data[3] <= r_data[3][2];
// Data[4] <= r_data[4][2];
// Data[5] <= r_data[5][2];
// Data[6] <= r_data[6][2];
// Data[7] <= r_data[7][2];
// end always@(posedge Clk or negedge Reset)beginif(!Reset)RxDone<=0;else if((div_cnt == Bps_DR/2)&&(bps_cnt==159))RxDone<=1;elseRxDone<=0;endendmodule
//这里养成一个习惯,在模块内部的信号用小写
module uart_cmd(input clk,input reset,input [7:0]rx_data,input rx_done,output reg [7:0]ctrl,output reg [31:0]time_set);reg [7:0] reg_data[7:0];always@(posedge clk)beginif(rx_done)beginreg_data[7]<=rx_data;reg_data[6]<=reg_data[7];reg_data[5]<=reg_data[6];reg_data[4]<=reg_data[5];reg_data[3]<=reg_data[4];reg_data[2]<=reg_data[3];reg_data[1]<=reg_data[2];reg_data[0]<=reg_data[1];endendreg rx_rx_done;always@(posedge clk)rx_rx_done<=rx_done;always@(posedge clk or negedge reset)beginif(!reset)begintime_set<=0;ctrl<=0;endelse if(rx_rx_done)beginif((reg_data[0]==8'h55)&&(reg_data[1]==8'ha5)&&(reg_data[7]==8'hf0))begintime_set[7:0]<=reg_data[2];time_set[15:8]<=reg_data[3];time_set[23:16]<=reg_data[4];time_set[31:24]<=reg_data[5];ctrl<=reg_data[6];endendend
endmodule测试文件
`timescale 1ns / 1psmodule uart_rx_ctrl_led_tb();reg Clk;reg reset;reg uart_rx;wire Led;uart_rx_ctrl_led uart_rx_ctrl_led(Clk,reset,uart_rx,Led);initial Clk = 1;always#10 Clk = ~Clk;initial beginreset = 0;uart_rx = 1;#201;reset = 1;#200; uart_tx_byte(8'h55);#90000;uart_tx_byte(8'ha5);#90000;uart_tx_byte(8'h55);#90000;uart_tx_byte(8'ha5);#90000;uart_tx_byte(8'h12);#90000;uart_tx_byte(8'h34);#90000;uart_tx_byte(8'h56);#90000;uart_tx_byte(8'h78);#90000; uart_tx_byte(8'h9a);#90000; uart_tx_byte(8'hf0);#90000; uart_tx_byte(8'h55);#90000;uart_tx_byte(8'ha5);#90000;uart_tx_byte(8'h9a);#90000;uart_tx_byte(8'h78);#90000;uart_tx_byte(8'h56);#90000;uart_tx_byte(8'h34);#90000; uart_tx_byte(8'h12);#90000; uart_tx_byte(8'hf1);#90000; $stop;endtask uart_tx_byte;input [7:0]tx_data;beginuart_rx = 1;#20;uart_rx = 0;#8680;uart_rx = tx_data[0];#8680;uart_rx = tx_data[1];#8680;uart_rx = tx_data[2];#8680;uart_rx = tx_data[3];#8680;uart_rx = tx_data[4];#8680;uart_rx = tx_data[5];#8680;uart_rx = tx_data[6];#8680;uart_rx = tx_data[7];#8680;uart_rx = 1;#8680; endendtask
endmodule
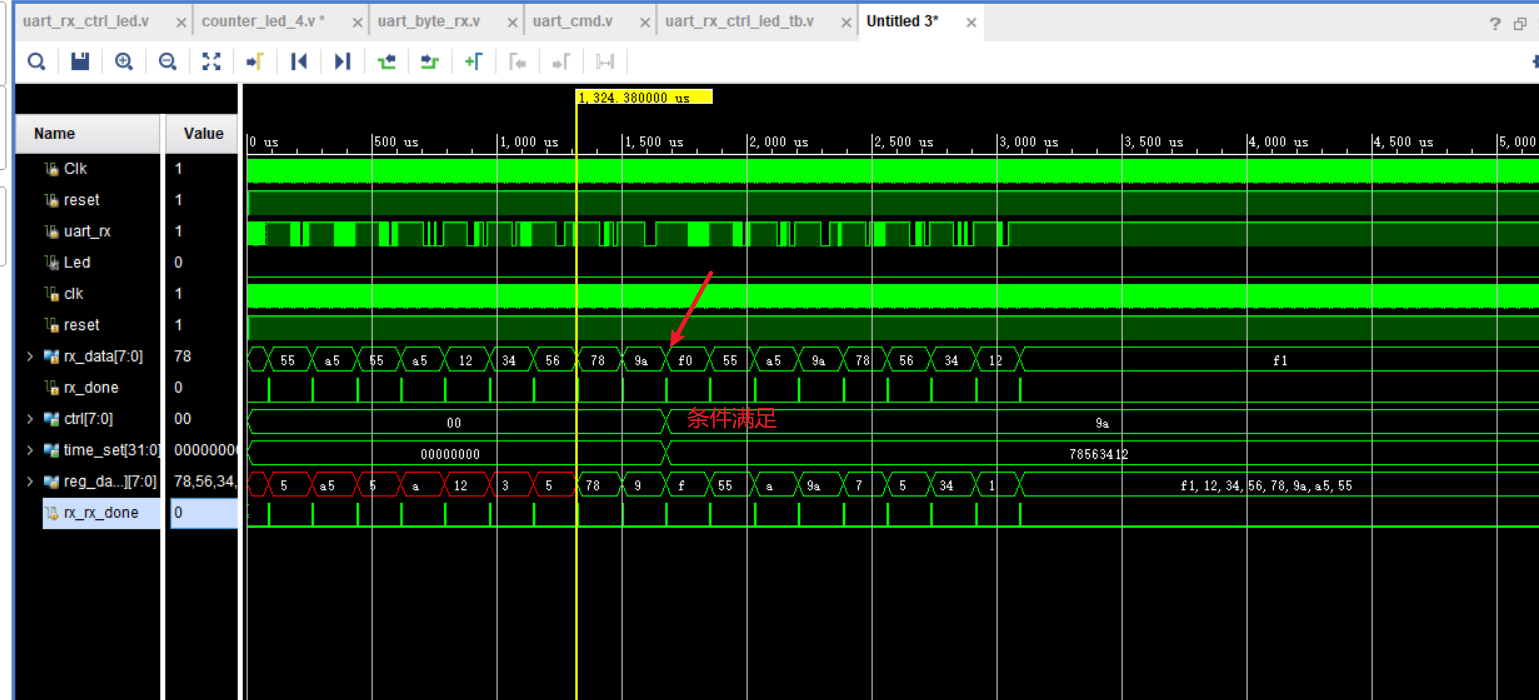
仿真截图
相关文章:
Verilog 学习第五节(串口接收部分)
小梅哥串口部分学习part2 串口通信接收原理串口通信接收程序设计与调试巧用位操作优化串口接收逻辑设计串口接收模块的项目应用案例串口通信接收原理 在采样的时候没有必要一直判断一个clk内全部都是高/低电平,如果采用直接对中间点进行判断的话,很有可能…...
)
AIX系统常见漏洞修复(exec、rlogin、rsh、ftp、telnet远端服务运行中)
漏洞:1.1 SSH 服务支持弱加密算法 1. 使用telnet 登录2.vi /etc/ssh/sshd_config 最后添加一下内容(去掉 arcfour、arcfour128、arcfour256 等弱加密算法) Ciphers aes128-ctr,aes192-ctr,aes256-ctr,aes128-cbc,3des-cbc,blowfish-cbc,cast…...
IEEE SLT 2022论文丨如何利用x-vectors提升语音鉴伪系统性能?
分享一篇IEEE SLT 2022收录的声纹识别方向的论文,《HOW TO BOOST ANTI-SPOOFING WITH X-VECTORS》由AuroraLab(极光实验室)发表。 来源丨AuroraLab AuroraLab源自清华大学电子工程系与新疆大学信息科学与工程学院,以说话人识别和…...
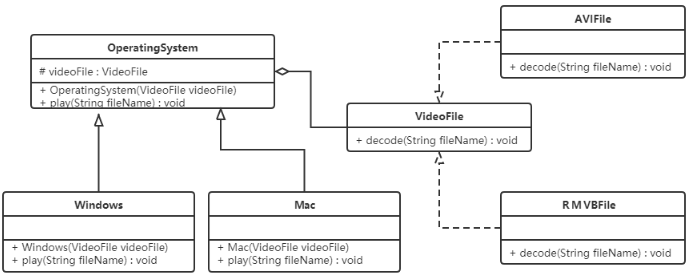
设计模式(十三)----结构型模式之桥接模式
1 概述 现在有一个需求,需要创建不同的图形,并且每个图形都有可能会有不同的颜色。我们可以利用继承的方式来设计类的关系: 我们可以发现有很多的类,假如我们再增加一个形状或再增加一种颜色,就需要创建更多的类。 试…...

倾向得分匹配案例分析
一、倾向得分匹配法说明 倾向得分匹配模型是由Rosenbaum和Rubin在1983年提出的,首次运用在生物医药领域,后来被广泛运用在药物治疗、计量研究、政策实施评价等领域。倾向得分匹配模型主要用来解决非处理因素(干扰因素)的偏差。 …...
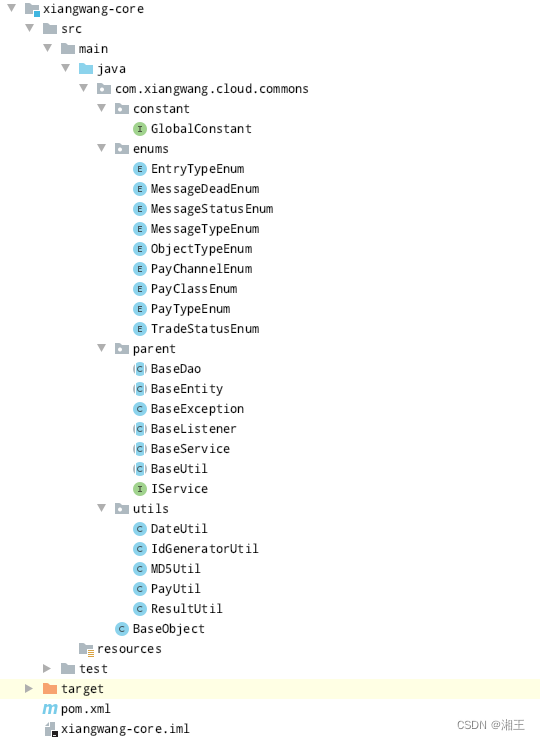
基于SpringCloud的可靠消息最终一致性04:项目基础代码
上一节给出了项目需求和骨架代码,这一节来接着看基础代码。骨架代码和基础代码最主要的区别是:骨架代码都是数据库脚本、POM依赖文件、配置文件内容、运维脚本等,而基础代码则是和业务有关联,但并非关键代码的部分。 这些代码不用一个个地看,主要是看看结构就行。 图二十五…...

操作系统权限提升(十八)之Linux提权-内核提权
Linux 内核提权 Linux 内核提权原理 内核提权是利用Linux内核的漏洞进行提权的,内核漏洞进行提权一般包括三个环节: 1、对目标系统进行信息收集,获取到系统内核信息及版本信息; 2、根据内核版本获取其对应的漏洞以及EXP 3、使…...

华为OD机试真题Java实现【快递运输】真题+解题思路+代码(20222023
快递运输 题目 一辆运送快递的货车,运送的快递均放在大小不等的长方体快递盒中,为了能够装载更多的快递,同时不能让货车超载,需要计算最多能装多少个快递。 注:快递的体积不受限制,快递数最多1000个,货车载重最大50000。 🔥🔥🔥🔥🔥👉👉👉👉👉�…...

java面试题-JVM问题排查
1.常见的Linux定位问题的工具?常见的 Linux 定位问题的命令可以分为以下几类:系统状态命令:包括 top、uptime、vmstat、sar 等命令,用于查看系统整体的状态,如 CPU 使用率、内存使用率、磁盘 I/O 等。进程状态命令&…...
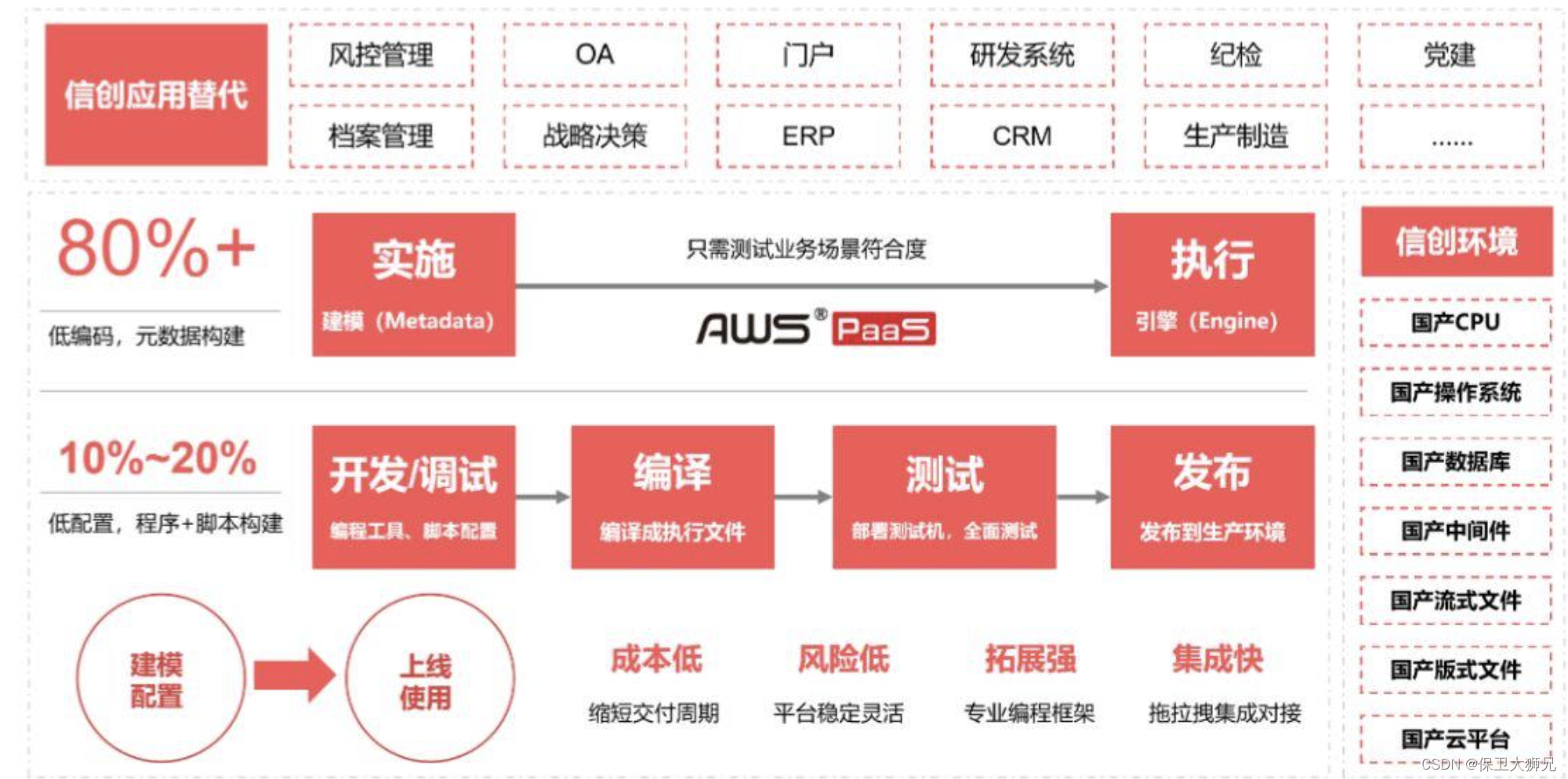
市场上有很多低代码开发平台,不懂编程的人可以用哪些?
市场上有很多低代码开发平台,不懂编程的人可以用哪些?这个问题一看就是外行问的啦,低代码平台主打的就是一个“全民开发”,而且现在很多低代码平台都发展为零代码了,不懂编程也完全可以使用! 所谓低代码开…...
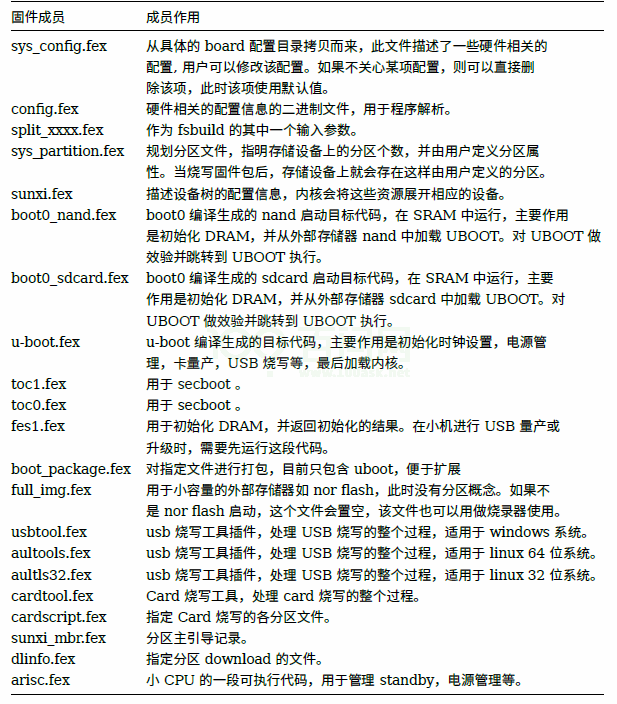
Tina_Linux打包流程说明指南_new
OpenRemoved_Tina_Linux_打包流程_说明指南_new 1 概述 1.1 编写目的 介绍Allwinner 平台上打包流程。 1.2 适用范围 Allwinner 软件平台Tina v3.0 版本以上。 1.3 相关人员 适用Tina 平台的广大客户,想了解Tina 打包流程的开发人员。 2 固件打包简介 固件…...

JVM面试题
JVM 1.jvm的组成部分 类加载器:将javac编译的class文件加载到内存中 运行时数据区:将内存划分成若干个不同的区域。 执行引擎:负责解析命令,提交操作系统执行。 本地接口:融合不同的语言为java所用 2.运行时数据区 方法区&…...

@FeignClient注解
1.在启动类上开启Feign功能 不开会提示找不到所需要的bean Consider defining a bean of type in your configuration SpringBootApplication EnableFeignClients public class AuthApplication {public static void main(String[] args) {SpringApplication.run(AuthApplic…...
一文搞懂如何在 React 中使用 防抖(Debounce)和 节流(Throttle)
在前端的日常开发中,经常会使用到两个函数防抖(Debounce)和节流(Throttle),防抖函数可以有效控制在一段时间内只执行最后一次请求,例如搜索框输入时,只在输入完成后才进行请求接口。…...

Airbyte API
Airbyte API涵盖了Airbyte功能的方方面面,主要分类:Source_definition:来源定义,实现了来源的增删改查功能。Destination_definition:目标定义,实现了目标的增删改查功能。Workspace:工作区管理…...

vue项目使用Electron开发桌面应用
添加npm配置避免安装Electron错误 请确保您的 node 版本大于等于 18. cmd运行: npm config edit 该命令会打开npm的配置文件,请在空白处添加: electron_builder_binaries_mirrorhttps://npmmirror.com/mirrors/electron-builder-binaries/ e…...

std::chrono笔记
文章目录1. radio原型作用示例2. duration原型:作用示例3. time_point原型作用示例4. clockssystem_clock示例steady_clock示例high_resolution_clock先说感觉,这个库真恶心,刚接触感觉跟shi一样,特别是那个命名空间,太…...

接收arp请求并发送回应的实例
本文简单介绍了arp协议,用一个实例查看收到的ARP请求,并对该请求发出ARP回应,实例有完整的源代码,使用C语言在Linux下实现,代码中有详细的注释。 1. ARP协议 ARP(Address Resolution Protocol),地址解析协议;在局域网上通过IP地址获取物理地址MAC的协议,该协议工作在数…...
【高性能计算】TVM使用TE手动优化矩阵乘法算法解析与代码解读
引言 注:本文主要介绍、解释TVM的矩阵优化思想、代码,需要配合代码注释一起阅读。 矩阵乘法是计算密集型运算。为了获得良好的 CPU 性能,有两个重要的优化措施: 提高内存访问的高速缓存命中率。复杂的数值计算和热点内存&#x…...

消息中间件的概念
中间件(middleware)是基础软件的一大类,属于可复用的软件范畴。中间件在操作系统软件,网络和数据库之上,应用软件之下,总的作用是为处于自己上层的应用软件提供运行于开发的环境,帮助用户灵活、高效的开发和集成复杂的…...

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明 如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看 说明:假设每台服务器已…...

在软件开发中正确使用MySQL日期时间类型的深度解析
在日常软件开发场景中,时间信息的存储是底层且核心的需求。从金融交易的精确记账时间、用户操作的行为日志,到供应链系统的物流节点时间戳,时间数据的准确性直接决定业务逻辑的可靠性。MySQL作为主流关系型数据库,其日期时间类型的…...
盘古信息PCB行业解决方案:以全域场景重构,激活智造新未来
一、破局:PCB行业的时代之问 在数字经济蓬勃发展的浪潮中,PCB(印制电路板)作为 “电子产品之母”,其重要性愈发凸显。随着 5G、人工智能等新兴技术的加速渗透,PCB行业面临着前所未有的挑战与机遇。产品迭代…...
)
Spring Boot 实现流式响应(兼容 2.7.x)
在实际开发中,我们可能会遇到一些流式数据处理的场景,比如接收来自上游接口的 Server-Sent Events(SSE) 或 流式 JSON 内容,并将其原样中转给前端页面或客户端。这种情况下,传统的 RestTemplate 缓存机制会…...

智慧工地云平台源码,基于微服务架构+Java+Spring Cloud +UniApp +MySql
智慧工地管理云平台系统,智慧工地全套源码,java版智慧工地源码,支持PC端、大屏端、移动端。 智慧工地聚焦建筑行业的市场需求,提供“平台网络终端”的整体解决方案,提供劳务管理、视频管理、智能监测、绿色施工、安全管…...

ssc377d修改flash分区大小
1、flash的分区默认分配16M、 / # df -h Filesystem Size Used Available Use% Mounted on /dev/root 1.9M 1.9M 0 100% / /dev/mtdblock4 3.0M...

Java多线程实现之Callable接口深度解析
Java多线程实现之Callable接口深度解析 一、Callable接口概述1.1 接口定义1.2 与Runnable接口的对比1.3 Future接口与FutureTask类 二、Callable接口的基本使用方法2.1 传统方式实现Callable接口2.2 使用Lambda表达式简化Callable实现2.3 使用FutureTask类执行Callable任务 三、…...

2021-03-15 iview一些问题
1.iview 在使用tree组件时,发现没有set类的方法,只有get,那么要改变tree值,只能遍历treeData,递归修改treeData的checked,发现无法更改,原因在于check模式下,子元素的勾选状态跟父节…...
视频字幕质量评估的大规模细粒度基准
大家读完觉得有帮助记得关注和点赞!!! 摘要 视频字幕在文本到视频生成任务中起着至关重要的作用,因为它们的质量直接影响所生成视频的语义连贯性和视觉保真度。尽管大型视觉-语言模型(VLMs)在字幕生成方面…...

Java 加密常用的各种算法及其选择
在数字化时代,数据安全至关重要,Java 作为广泛应用的编程语言,提供了丰富的加密算法来保障数据的保密性、完整性和真实性。了解这些常用加密算法及其适用场景,有助于开发者在不同的业务需求中做出正确的选择。 一、对称加密算法…...