EtherCAT 伺服控制功能块实现
EtherCAT 是运动控制领域主要的通信协议,开源EtherCAT 主站协议栈 IgH 和SOEM 两个项目,IgH 相对更普及一些,但是它是基于Linux 内核的方式,比SOEM更复杂一些。使用IgH 协议栈编写一个应用程序,控制EtherCAT 伺服电机驱动器是比较简单的。但是要实现一个通用的EtherCAT 组件库(例如IEC61131-3 ,或者IEC61499功能块)就复杂一些了,例如动态地加入一个从站驱动器,通过组件控制某一个从站。
本博文研究基于组件的EtherCAT 程序架构及其实现方法。
背景技术
CiA402 运动控制的CANopen 驱动器规范
EtherCAT 的运动控制器是基于CANopen 的CiA402规范。这套配置文件规范标准化了伺服驱动器、变频器和步进电机控制器的功能行为。它定义了状态机,控制字,状态字,参数值,它们映射到过程数据对象(PDO)配置文件已在 IEC 61800-7 系列中部分实现国际标准化。
COE 协议
CANopen Over EtherCAT 协议被称为COE,它的架构为:
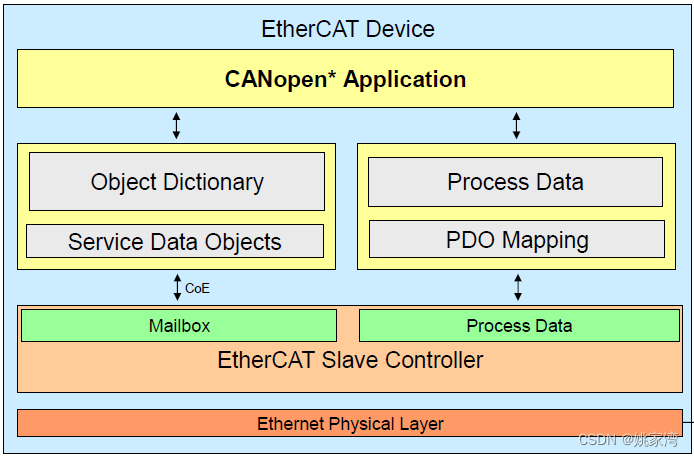
正是由于如此,基于EtherCAT 的运动控制器的控制方式,PDO 定义,控制方式都是类似的。
主要的一些数据对象

PLCopen 运动控制库
最著名的运动控制的标准应当数PLCopen 运动控制库,它是PLC 上的一个功能块集。PLC 的应用程序通过这些功能块能够方便地实现运动控制。但是这些功能块如何实现,如何与硬件驱动结合。内部实现应该是比较复杂的。笔者看来,应该有两种方式:
- PLC 内嵌运动控制模型
- 通过Ethercat 总线外接运动控制模块
两种结构的实现方法应该各不相同。是否有支持etherCAT 的PLCopen 功能块库?
EtherCAT 主站程序
EtherCAT 协议是倍福公司提出的,从站通常使用专用ASIC 芯片,FPGA 实现,而主站使用通用Ethernet接口和软件实现。EtherCAT 主站协议有专业公司开发的商业化产品,也有开源代码,下面是两个比较流行的EtherCAT Master
- IgH
- SOEM
感觉IgH 更普及一点,于是我们选择IgH 协议栈。
EtherCAT 组件设计
IgH 主要实现Ethercat 协议数据帧的映射,以及通过Ethernet 发送和接收。如果设计成为组件库,许多参数需要可编程,比如:
- 多少从站
- 每个从站的位置
- 每个从站的操作模型,操作算法
- 每个从机的状态
本项目的基本思路是构建一个从站类,每个物理从站对应一个虚拟从站,应用程序通过虚拟从站控制从站,将虚拟从站的参数映射到物理从站参数,通过Ethercat 网络发送和接收。
从站类(SevoController Class)与主站类(Master Class)
为了实现动态的建立和控制从站,采用虚拟从站类。为每个物理的从站创建一个从站类(SevoController). 该类型中包含了物理伺服驱动控制器的参数和状态。应用程序可以通过修改SevoController 的参数,实现对物理伺服的驱动。
为了相对于,我们同时设立一个Master 类(Master Class)。存放主站的参数。
系统架构
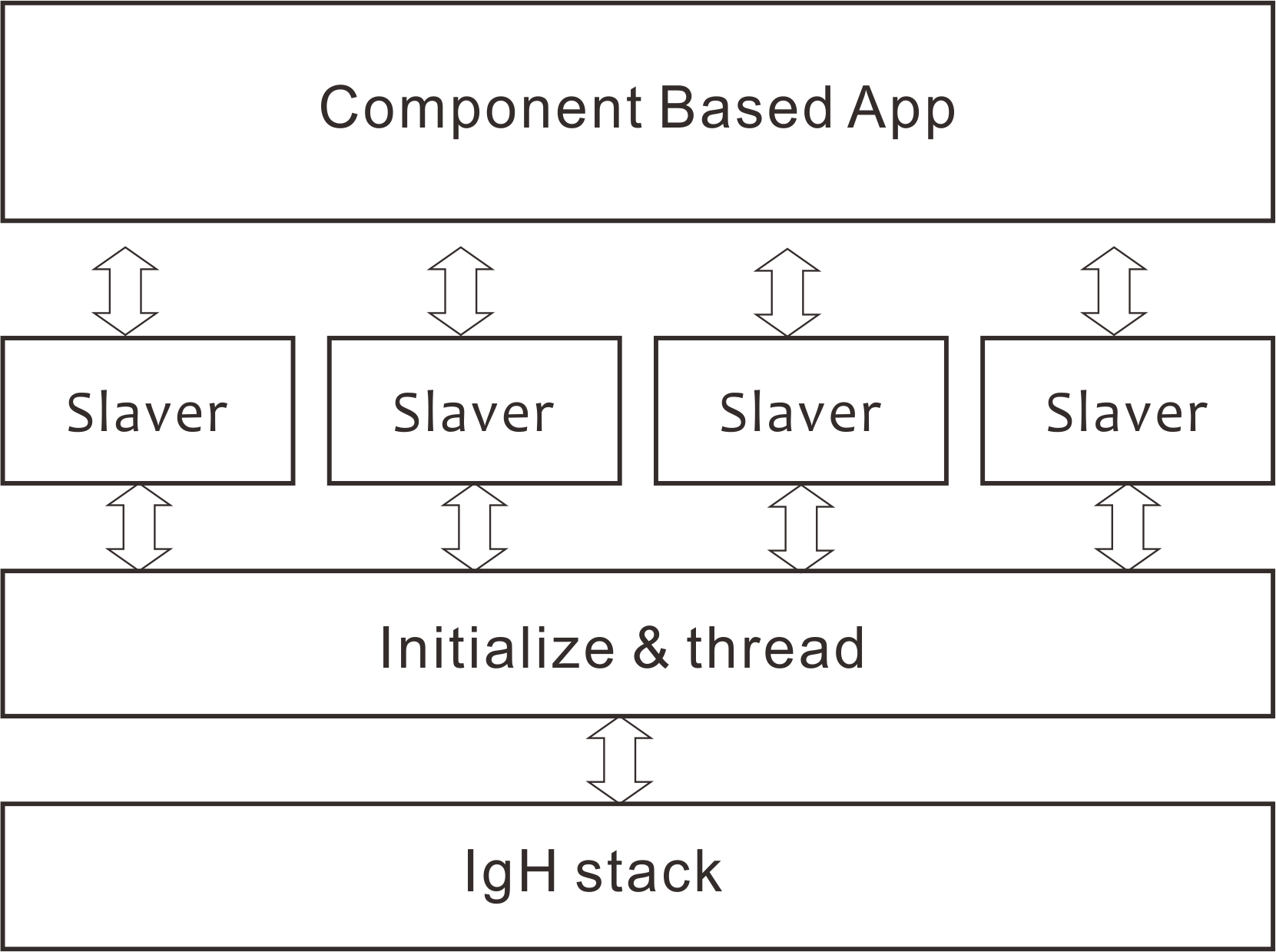
从上图可见,使用Slaver 类作为应用程序和EtherCAT 底层的接口。EtherCAT 底层程序读取Slave 的参数,对EtherCAT 初始化,并且建立一个EtherCAT 线程,周期扫描各个从站。
从站类(slave class)
#ifndef _SEVOCONTROLLER_H
#define _SEVOCONTROLLER_H#include <errno.h>
#include <signal.h>
#include <stdio.h>
#include <string>
#include <sys/resource.h>
#include <sys/time.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/mman.h>
#include <stdint.h>
#include "ecrt.h"
#define PROFILE_POSITION 1
#define VEOLOCITY 2
#define PROFILE_VELOCITY 3
#define PROFILE_TORQUE 4
#define HOMING 6
#define CYCLICE_SYNC_POSITION 8
using namespace std;
struct pdo_offset
{unsigned int ctrl_word;unsigned int operation_mode;unsigned int target_velocity;unsigned int target_position;unsigned int profile_velocity;unsigned int status_word;unsigned int mode_display;unsigned int current_velocity;
};
class SevoController
{
public:pdo_offset offset;uint16_t position;uint32_t vendor_id;uint32_t product_code;uint32_t position_actual;uint32_t velocity_actual;uint32_t operation_modes;uint32_t target_velocity;uint32_t target_position;uint32_t profile_velocity;ec_slave_config_t *slave_config;void eventAction(string EventName);SevoController(uint32_t Position, uint32_t Vendor_id, uint32_t Product_cdode, uint32_t Modes_operation);
};
#endif控制代码
#include "ecrt.h"
#include "stdio.h"
#include <errno.h>
#include <sys/resource.h>
#include <list>
#include "SevoController.hpp"
#include <pthread.h>
void check_domain_state(void);
void check_slave_config_states(void);
pthread_t cycle_thread;
int cycles;
int Run = 1;
ec_master_t *master = NULL;
static ec_master_state_t master_state = {};static ec_domain_t *domainServo = NULL;
static ec_domain_state_t domainServo_state = {};
static uint8_t *domain_pd = NULL;
std::list<SevoController *> SevoList;
ec_pdo_entry_reg_t *domainServo_regs;
static ec_pdo_entry_info_t pdo_entries[] = {/*RxPdo 0x1600*/{0x6040, 0x00, 16},{0x6060, 0x00, 8 }, {0x60FF, 0x00, 32},{0x607A, 0x00, 32},{0x6081, 0x00, 32},/*TxPdo 0x1A00*/{0x6041, 0x00, 16},{0x6061, 0x00, 8},{0x606C, 0x00, 32}
};static ec_pdo_info_t Slave_pdos[] = {// RxPdo{0x1600, 5, pdo_entries + 0},// TxPdo{0x1A00, 3, pdo_entries + 5}};static ec_sync_info_t Slave_syncs[] = {{0, EC_DIR_OUTPUT, 0, NULL, EC_WD_DISABLE},{1, EC_DIR_INPUT, 0, NULL, EC_WD_DISABLE},{2, EC_DIR_OUTPUT, 1, Slave_pdos + 0, EC_WD_DISABLE},{3, EC_DIR_INPUT, 1, Slave_pdos + 1, EC_WD_DISABLE},{0xFF}};
int ConfigPDO()
{domainServo = ecrt_master_create_domain(master);if (!domainServo){return -1;}//domainServo_regs = new ec_pdo_entry_reg_t[9];std::list<SevoController *>::iterator it;int index = 0;for (it = SevoList.begin(); it != SevoList.end(); it++){domainServo_regs[index++] = {0, (**it).position, (**it).vendor_id, (**it).product_code, 0x6040, 0x00, &((**it).offset.ctrl_word)};domainServo_regs[index++] = {0, (**it).position, (**it).vendor_id, (**it).product_code, 0x6060, 0x00, &((**it).offset.operation_mode)};domainServo_regs[index++] = {0, (**it).position, (**it).vendor_id, (**it).product_code, 0x60FF, 0x00, &((**it).offset.target_velocity)};domainServo_regs[index++] = {0, (**it).position, (**it).vendor_id, (**it).product_code, 0x607A, 0x00, &((**it).offset.target_position)};domainServo_regs[index++] = {0, (**it).position, (**it).vendor_id, (**it).product_code, 0x6081, 0x00, &((**it).offset.profile_velocity)};domainServo_regs[index++] = {0, (**it).position, (**it).vendor_id, (**it).product_code, 0x6041, 0x00, &((**it).offset.status_word)};domainServo_regs[index++] = {0, (**it).position, (**it).vendor_id, (**it).product_code, 0x6061, 0x00, &((**it).offset.mode_display)};domainServo_regs[index++] = {0, (**it).position, (**it).vendor_id, (**it).product_code, 0x606C, 0x00, &((**it).offset.current_velocity)};printf("product_code:%x\n", (**it).product_code);}domainServo_regs[index++] = {}; ////for (it = SevoList.begin(); it != SevoList.end(); it++){(**it).slave_config = ecrt_master_slave_config(master, 0, (**it).position, (**it).vendor_id, (**it).product_code);ecrt_slave_config_pdos((**it).slave_config, EC_END, Slave_syncs);}//if (ecrt_domain_reg_pdo_entry_list(domainServo, domainServo_regs)){printf("PDO entry registration failed!\n");return -1;}return 0;
}
void check_master_state(void)
{ec_master_state_t ms;ecrt_master_state(master, &ms);if (ms.slaves_responding != master_state.slaves_responding){printf("%u slave(s).\n", ms.slaves_responding);}if (ms.al_states != master_state.al_states){printf("AL states: 0x%02X.\n", ms.al_states);}if (ms.link_up != master_state.link_up){printf("Link is %s.\n", ms.link_up ? "up" : "down");}master_state = ms;
}
void *cyclic_task(void *arg)
{uint16_t status;// int8_t opmode;static uint16_t command = 0x004F;printf("Cycles Task Start\n");while (Run){ecrt_master_receive(master);ecrt_domain_process(domainServo);check_domain_state();check_master_state();check_slave_config_states();std::list<SevoController *>::iterator it;for (it = SevoList.begin(); it != SevoList.end(); it++){status = EC_READ_U16(domain_pd + (**it).offset.status_word);if ((status & command) == 0x0040){printf("Switch On disabled\n");EC_WRITE_U16(domain_pd + (**it).offset.ctrl_word, 0x0006);EC_WRITE_S8(domain_pd + (**it).offset.operation_mode, (**it).operation_modes);command = 0x006F;}/*Ready to switch On*/else if ((status & command) == 0x0021){EC_WRITE_U16(domain_pd + (**it).offset.ctrl_word, 0x0007);command = 0x006F;}/* Switched On*/else if ((status & command) == 0x0023){printf("Switched On\n");EC_WRITE_U16(domain_pd + (**it).offset.ctrl_word, 0x000f);if ((**it).operation_modes == PROFILE_VELOCITY){EC_WRITE_S32(domain_pd + (**it).offset.target_velocity, (**it).target_velocity);}else{EC_WRITE_S32(domain_pd + (**it).offset.target_position, (**it).target_position);EC_WRITE_S32(domain_pd + (**it).offset.profile_velocity, (**it).profile_velocity);}command = 0x006F;}// operation enabledelse if ((status & command) == 0x0027){printf("operation enabled:%d\n", cycles);if (cycles == 0)EC_WRITE_U16(domain_pd + (**it).offset.ctrl_word, 0x001f);if ((status & 0x400) == 0x400){printf("target reachedd\n");Run = 0;EC_WRITE_U16(domain_pd + (**it).offset.ctrl_word, 0x0180); // halt}cycles = cycles + 1;}}ecrt_domain_queue(domainServo);ecrt_master_send(master);usleep(10000);}return ((void *)0);
}
void ethercat_initialize()
{master = ecrt_request_master(0);ConfigPDO();if (ecrt_master_activate(master)){printf("Activating master...failed\n");return;}if (!(domain_pd = ecrt_domain_data(domainServo))){fprintf(stderr, "Failed to get domain data pointer.\n");return;}// 启动master Cycles Threadpthread_create(&cycle_thread, NULL, cyclic_task, NULL);
}
void check_domain_state(void)
{ec_domain_state_t ds = {};// ec_domain_state_t ds1 = {};// domainServoInputecrt_domain_state(domainServo, &ds);if (ds.working_counter != domainServo_state.working_counter){printf("domainServoInput: WC %u.\n", ds.working_counter);}if (ds.wc_state != domainServo_state.wc_state){printf("domainServoInput: State %u.\n", ds.wc_state);}domainServo_state = ds;
}
void check_slave_config_states(void)
{ec_master_state_t ms;ecrt_master_state(master, &ms);if (ms.slaves_responding != master_state.slaves_responding){printf("%u slave(s).\n", ms.slaves_responding);}if (ms.al_states != master_state.al_states){printf("AL states: 0x%02X.\n", ms.al_states);}if (ms.link_up != master_state.link_up){printf("Link is %s.\n", ms.link_up ? "up" : "down");}master_state = ms;
}
主程序
/*****************************************************************************
sudo /etc/init.d/ethercat start
gcc testbyesm.c -Wall -I /opt/etherlab/include -l ethercat -L /opt/etherlab/lib -o testbyesm****************************************************************************/
#include "time.h"
#include "SevoController.hpp"
#include "ethercat.hpp"
#define Panasonic 0x0000066F,0x60380004
#define TASK_FREQUENCY 100 /*Hz*/
#define TIMOUT_CLEAR_ERROR (1*TASK_FREQUENCY) /*clearing error timeout*/
#define TARGET_VELOCITY 8388608 /*target velocity*/
#define PROFILE_VELOCITY 3 /*Operation mode for 0x6060:0*/
#define PROFILE_POSITION 1
int main(){printf("EtherCAT Component Test\n");SevoController *Sevo1=new SevoController(0,Panasonic,PROFILE_POSITION);Sevo1->profile_velocity=TARGET_VELOCITY*100;Sevo1->target_velocity=TARGET_VELOCITY*10;Sevo1->target_position=TARGET_VELOCITY/2;SevoList.push_back(Sevo1);ethercat_initialize();while(1){sleep(10);}
}小结
上面的程序基于松下A6 EtherCAT 伺服电机
相关文章:
EtherCAT 伺服控制功能块实现
EtherCAT 是运动控制领域主要的通信协议,开源EtherCAT 主站协议栈 IgH 和SOEM 两个项目,IgH 相对更普及一些,但是它是基于Linux 内核的方式,比SOEM更复杂一些。使用IgH 协议栈编写一个应用程序,控制EtherCAT 伺服电机驱…...

如何基于OpenCV和Sklearn算法库开展机器学习算法研究
大家在做机器学习或深度学习研究过程中,不可避免都会涉及到对各种算法的研究使用,目前比较有名的机器学习算法库主要有OpenCV和Scikit-learn(简称Sklearn),二者都支持各种机器学习算法,主要有监督学习、无监…...

在 Node.js 中发出 HTTP 请求的 5 种方法
在 Node.js 中发出 HTTP 请求的 5 种方法 学习如何在 Node.js 中发出 HTTP 请求可能会让人感到不知所措,因为有数十个可用的库,每个解决方案都声称比上一个更高效。一些库提供跨平台支持,而另一些库则关注捆绑包大小或开发人员体验。 在这篇…...
pipeline agent分布式构建
开启 agent rootjenkins:~/learning-jenkins-cicd/07-jenkins-agents# docker-compose -f docker-compose-inbound-agent.yml up -d Jenkins配置添加 pipeline { agent { label docker-jnlp-agent }parameters {booleanParam(name:pushImage, defaultValue: true, descript…...

MySQL(17):触发器
概述 MySQL从 5.0.2 版本开始支持触发器。MySQL的触发器和存储过程一样,都是嵌入到MySQL服务器的一段程序。 触发器是由 事件来触发 某个操作,这些事件包括 INSERT 、 UPDATE 、 DELETE 事件。 所谓事件就是指用户的动作或者触发某项行为。 如果定义了触…...
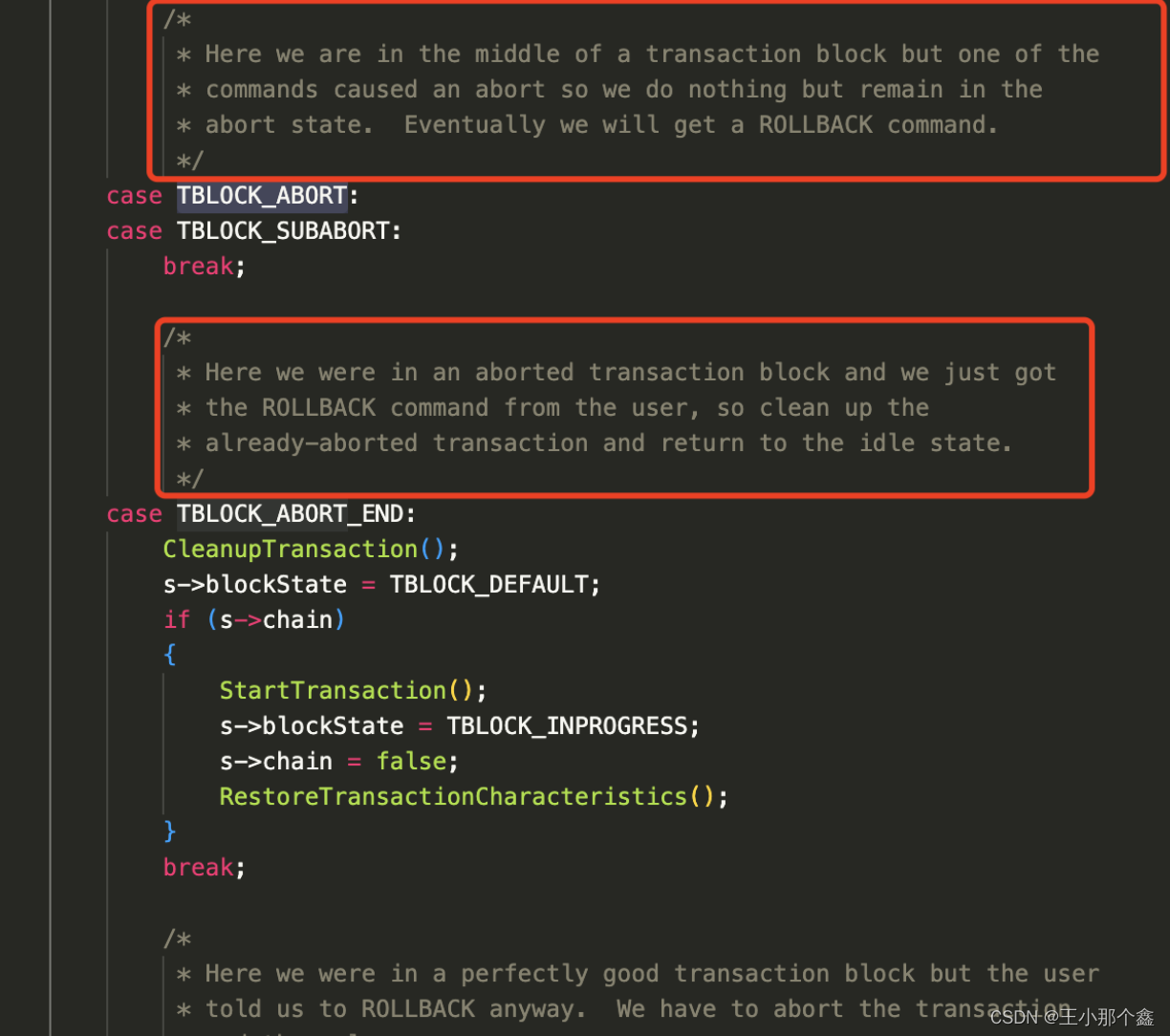
挖掘PostgreSQL事务的“中间态”----更加严谨的数据一致性?
1.问题 今天在上班途中,中心的妹纸突然找我,非常温柔的找我帮忙看个数据库的报错。当然以我的性格,妹子找我的事情对我来说优先级肯定是最高的,所以立马放下手中的“小事”,转身向妹子走去。具体是一个什么样的问题呢…...

多种方法实现conda环境迁移
Conda 为包管理器和虚拟环境管理器。在配置完项目环境,进行了编写和测试代码,需要大量数据测试运行时,需要将其移至另一台主机上。Conda 提供了多种保存和移动环境的方法。 方法1: scp拷贝法,直接将envs的环境文件夹…...
C++ string类(一)
1.C语言中的字符串 C语言中,字符串是以\0结尾的一些字符的集合,为了操作方便,C标准库中提供了一些str系列的库函数,但是这些库函数与字符串是分离开的,不太符 OOP(Object Oriented Programming)的思想,而且…...

系统时间和JVM的Date时间不一致问题解决
通过Java得到的时间与操作系统时间不一致,如何修改Java虚拟机时间? 造成这种问题的原因可能是:你的操作系统时区跟你JVM的时区不一致。 你的操作系统应该是中国的时区吧,而JVM的时区不一定是中国时区,你在应用服务器…...
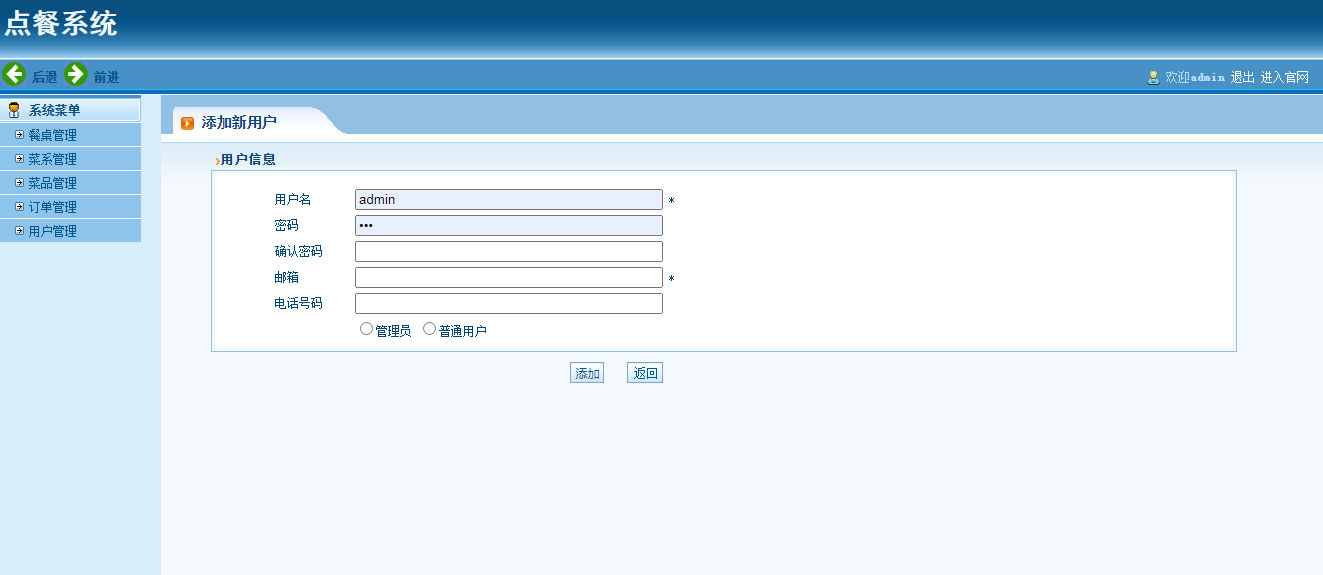
23111701[含文档+PPT+源码等]计算机毕业设计javaweb点餐系统全套餐饮就餐订餐餐厅
文章目录 **项目功能简介:****点餐系统分为前台和后台****前台功能介绍:****后台功能介绍:** **论文截图:****实现:****代码片段:** 编程技术交流、源码分享、模板分享、网课教程 🐧裙:77687156…...
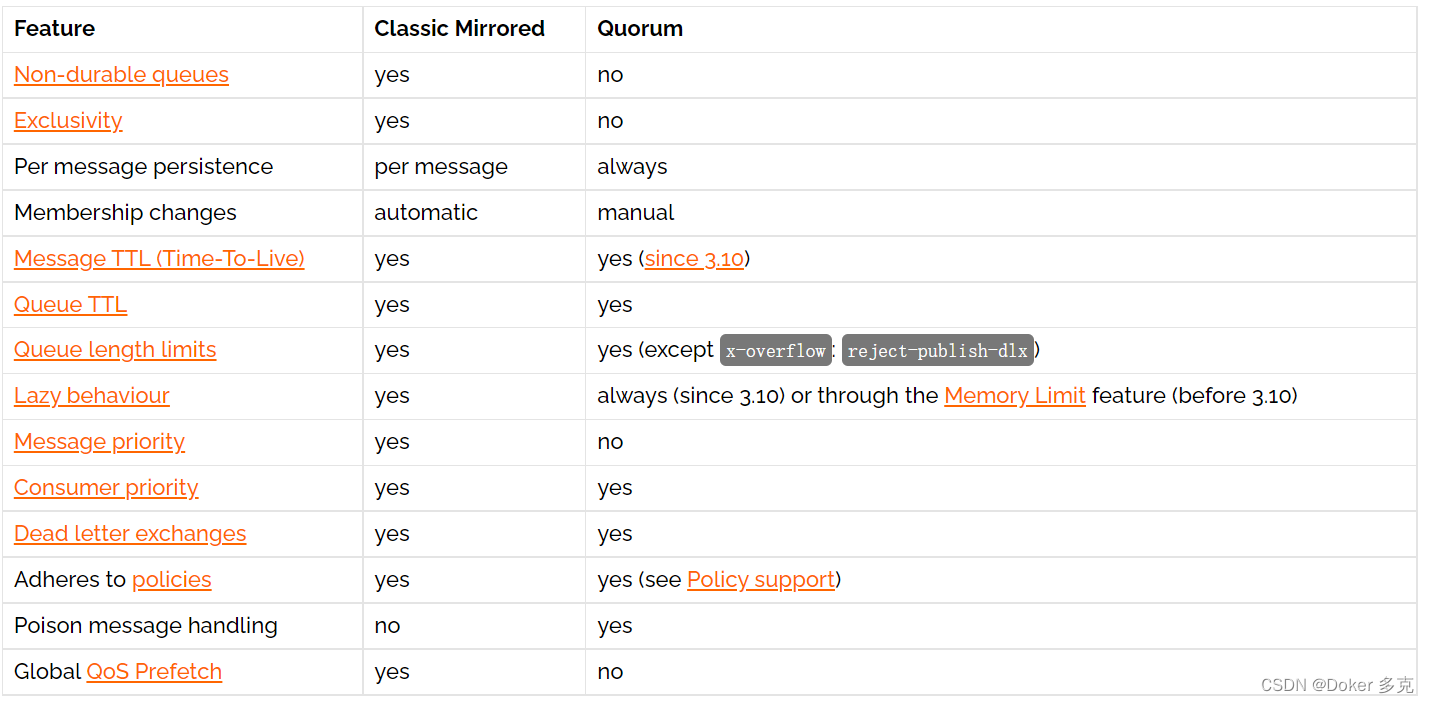
RabbitMQ 部署及配置详解(集群部署)
单机部署请移步: RabbitMQ 部署及配置详解 (单机) RabbitMQ 集群是一个或 多个节点,每个节点共享用户、虚拟主机、 队列、交换、绑定、运行时参数和其他分布式状态。 一、RabbitMQ 集群可以通过多种方式形成: 通过在配置文件中列出群集节点以…...
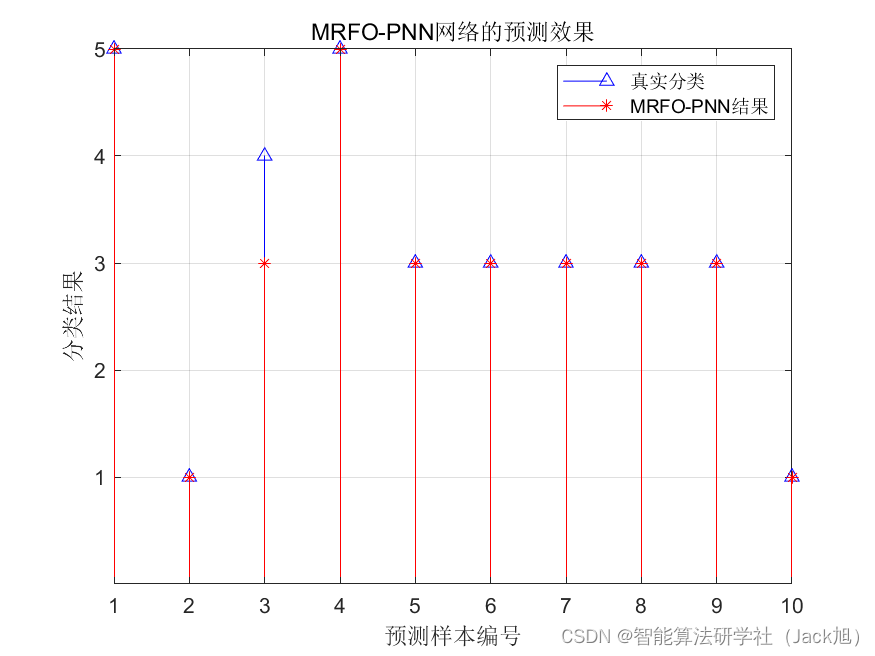
基于蝠鲼觅食算法优化概率神经网络PNN的分类预测 - 附代码
基于蝠鲼觅食算法优化概率神经网络PNN的分类预测 - 附代码 文章目录 基于蝠鲼觅食算法优化概率神经网络PNN的分类预测 - 附代码1.PNN网络概述2.变压器故障诊街系统相关背景2.1 模型建立 3.基于蝠鲼觅食优化的PNN网络5.测试结果6.参考文献7.Matlab代码 摘要:针对PNN神…...

「分享学习」SpringCloudAlibaba高并发仿斗鱼直播平台实战完结
[分享学习]SpringCloudAlibaba高并发仿斗鱼直播平台实战完结 第一段:简介 Spring Cloud Alibaba是基于Spring Cloud和阿里巴巴开源技术的微效劳框架,普遍应用于大范围高并发的互联网应用系统。本文将引见如何运用Spring Cloud Alibaba构建一个高并发的仿…...
Vue|props配置
props是Vue中用于传递数据的属性。通过在子组件的选项中定义props属性,可以指定子组件可以接收的数据以及其他配置选项。父组件可以通过在子组件上使用特定的属性来传递数据。 目录 目录 App.vue 什么是App.vue 组件引用 props配置 组件复用 案例1:…...
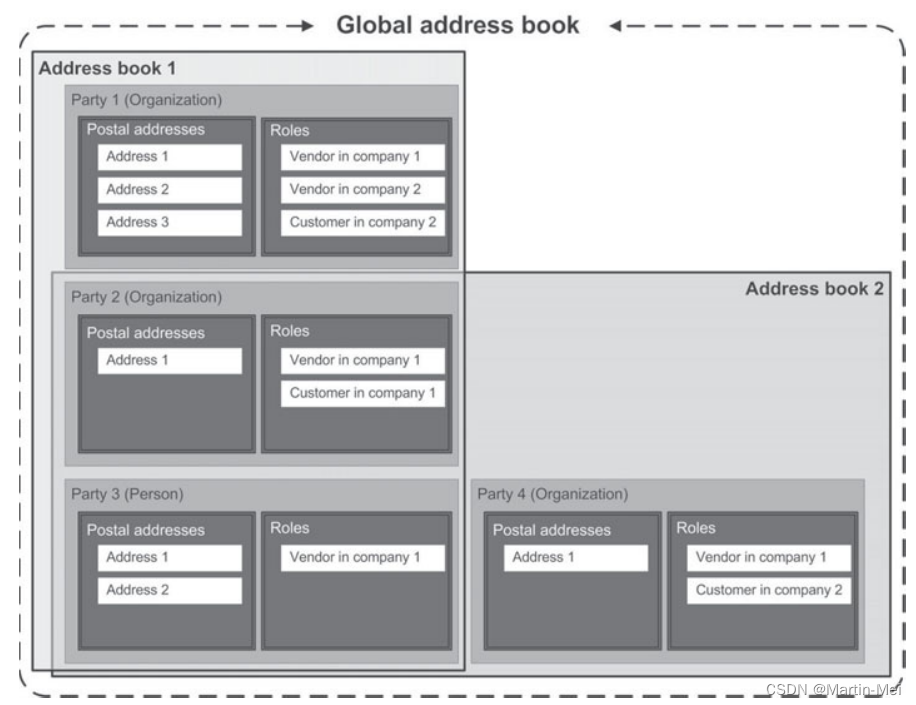
使用Microsoft Dynamics AX 2012 - 2. 入门:导航和常规选项
Microsoft Dynamics AX的核心原则之一是为习惯于Microsoft软件的用户提供熟悉的外观和感觉。然而,业务软件必须适应业务流程,这可能相当复杂。 用户界面和常见任务 在我们开始进行业务流程和案例研究之前,我们想了解一下本章中的常见功能。…...
【代码随想录】算法训练计划21、22
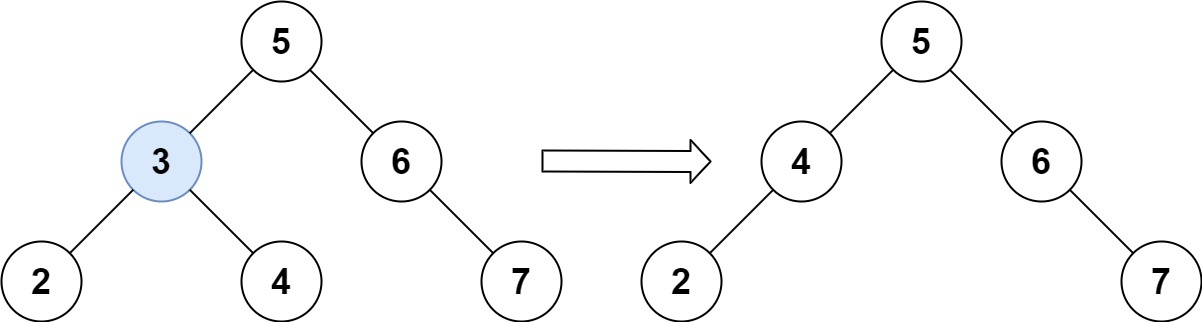
day 21 1、530. 二叉搜索树的最小绝对差 题目: 给你一个二叉搜索树的根节点 root ,返回 树中任意两不同节点值之间的最小差值 。 差值是一个正数,其数值等于两值之差的绝对值。 思路: 利用了二叉搜索树的中序遍历特性用了双指…...
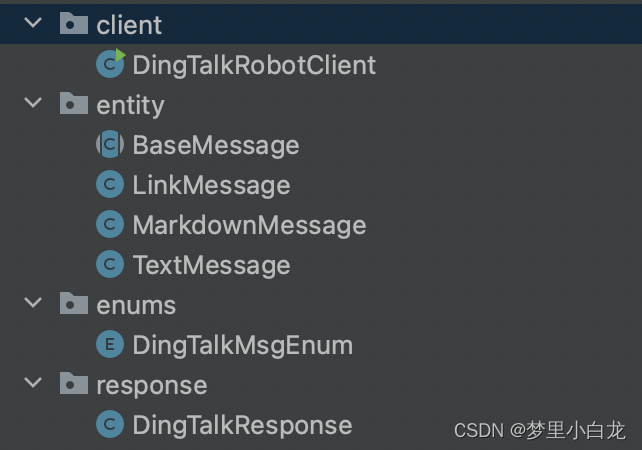
java实现钉钉机器人消息推送
项目开发中需要用到钉钉机器人发送任务状态,本来想单独做一个功能就好,但是想着公司用到钉钉机器人发送项目挺多的。所以把这个钉钉机器人抽离成一个组件发布到企业maven仓库,这样可以给其他同事用提高工作效率。 1.目录结构 2.用抽象类&…...
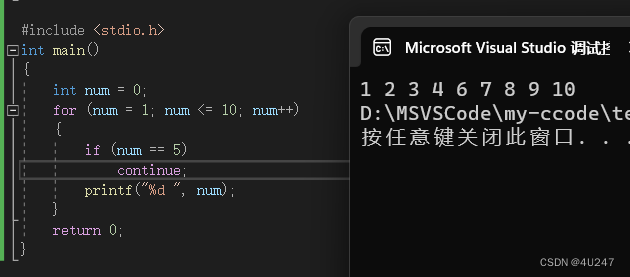
C语言之break continue详解
C语言之break continue 文章目录 C语言之break continue1. break 和 continue2. while语句中的break和continue2.1break和continue举例 3. for语句中的break和continue3.1break和continue举例 1. break 和 continue 循环中break和continue 在循环语句中,如果我达到…...
mysql group by 执行原理及千万级别count 查询优化
大家好,我是蓝胖子,前段时间mysql经常碰到慢查询报警,我们线上的慢sql阈值是1s,出现报警的表数据有 7000多万,经常出现报警的是一个group by的count查询,于是便开始着手优化这块,遂有此篇,记录下…...

Linux的几个常用基本指令
目录 1. ls 指令2.pwd命令3.cd 指令4. touch指令5.mkdir指令6.rmdir指令 && rm 指令7.man指令8.cp指令9.mv指令10.cat指令 1. ls 指令 语法: ls [选项][目录或文件] 功能:对于目录,该命令列出该目录下的所有子目录与文件。对于文件&…...

Vim 调用外部命令学习笔记
Vim 外部命令集成完全指南 文章目录 Vim 外部命令集成完全指南核心概念理解命令语法解析语法对比 常用外部命令详解文本排序与去重文本筛选与搜索高级 grep 搜索技巧文本替换与编辑字符处理高级文本处理编程语言处理其他实用命令 范围操作示例指定行范围处理复合命令示例 实用技…...

MODBUS TCP转CANopen 技术赋能高效协同作业
在现代工业自动化领域,MODBUS TCP和CANopen两种通讯协议因其稳定性和高效性被广泛应用于各种设备和系统中。而随着科技的不断进步,这两种通讯协议也正在被逐步融合,形成了一种新型的通讯方式——开疆智能MODBUS TCP转CANopen网关KJ-TCPC-CANP…...
用docker来安装部署freeswitch记录
今天刚才测试一个callcenter的项目,所以尝试安装freeswitch 1、使用轩辕镜像 - 中国开发者首选的专业 Docker 镜像加速服务平台 编辑下面/etc/docker/daemon.json文件为 {"registry-mirrors": ["https://docker.xuanyuan.me"] }同时可以进入轩…...
【论文阅读28】-CNN-BiLSTM-Attention-(2024)
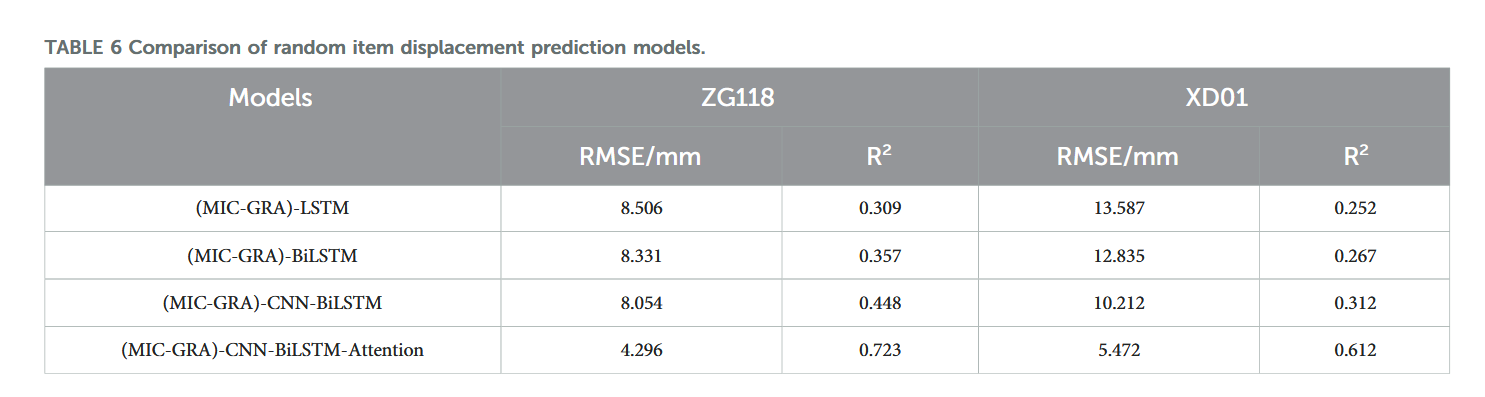
本文把滑坡位移序列拆开、筛优质因子,再用 CNN-BiLSTM-Attention 来动态预测每个子序列,最后重构出总位移,预测效果超越传统模型。 文章目录 1 引言2 方法2.1 位移时间序列加性模型2.2 变分模态分解 (VMD) 具体步骤2.3.1 样本熵(S…...
 自用)
css3笔记 (1) 自用
outline: none 用于移除元素获得焦点时默认的轮廓线 broder:0 用于移除边框 font-size:0 用于设置字体不显示 list-style: none 消除<li> 标签默认样式 margin: xx auto 版心居中 width:100% 通栏 vertical-align 作用于行内元素 / 表格单元格ÿ…...

代码随想录刷题day30
1、零钱兑换II 给你一个整数数组 coins 表示不同面额的硬币,另给一个整数 amount 表示总金额。 请你计算并返回可以凑成总金额的硬币组合数。如果任何硬币组合都无法凑出总金额,返回 0 。 假设每一种面额的硬币有无限个。 题目数据保证结果符合 32 位带…...
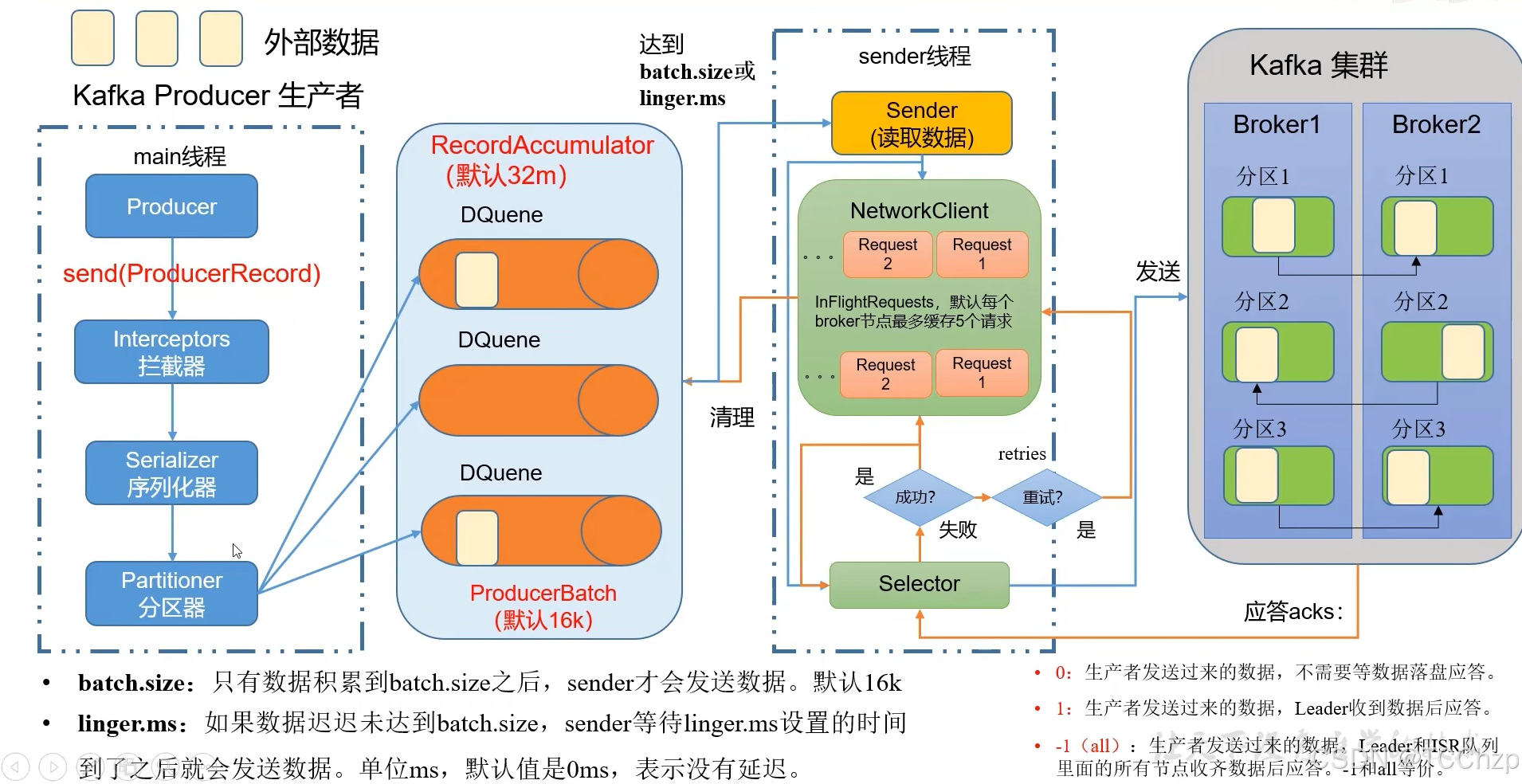
Kafka入门-生产者
生产者 生产者发送流程: 延迟时间为0ms时,也就意味着每当有数据就会直接发送 异步发送API 异步发送和同步发送的不同在于:异步发送不需要等待结果,同步发送必须等待结果才能进行下一步发送。 普通异步发送 首先导入所需的k…...

jmeter聚合报告中参数详解
sample、average、min、max、90%line、95%line,99%line、Error错误率、吞吐量Thoughput、KB/sec每秒传输的数据量 sample(样本数) 表示测试中发送的请求数量,即测试执行了多少次请求。 单位,以个或者次数表示。 示例:…...

Linux系统部署KES
1、安装准备 1.版本说明V008R006C009B0014 V008:是version产品的大版本。 R006:是release产品特性版本。 C009:是通用版 B0014:是build开发过程中的构建版本2.硬件要求 #安全版和企业版 内存:1GB 以上 硬盘…...

Scrapy-Redis分布式爬虫架构的可扩展性与容错性增强:基于微服务与容器化的解决方案
在大数据时代,海量数据的采集与处理成为企业和研究机构获取信息的关键环节。Scrapy-Redis作为一种经典的分布式爬虫架构,在处理大规模数据抓取任务时展现出强大的能力。然而,随着业务规模的不断扩大和数据抓取需求的日益复杂,传统…...