深度学习YOLO安检管制物品识别与检测 - python opencv 计算机竞赛
文章目录
- 0 前言
- 1 课题背景
- 2 实现效果
- 3 卷积神经网络
- 4 Yolov5
- 5 模型训练
- 6 实现效果
- 7 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 **基于深度学习YOLO安检管制误判识别与检测 **
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:4分
- 工作量:3分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
1 课题背景
军事信息化建设一直是各国的研究热点,但我国的武器存在着种类繁多、信息散落等问题,这不利于国防工作提取有效信息,大大妨碍了我军信息化建设的步伐。同时,我军武器常以文字、二维图片和实体武器等传统方式进行展示,交互性差且无法满足更多军迷了解武器性能、近距离观赏或把玩武器的迫切需求。本文将改进后的Yolov5算法应用到武器识别中,将武器图片中的武器快速识别出来,提取武器的相关信息,并将其放入三维的武器展现系统中进行展示,以期让人们了解和掌握各种武器,有利于推动军事信息化建设。
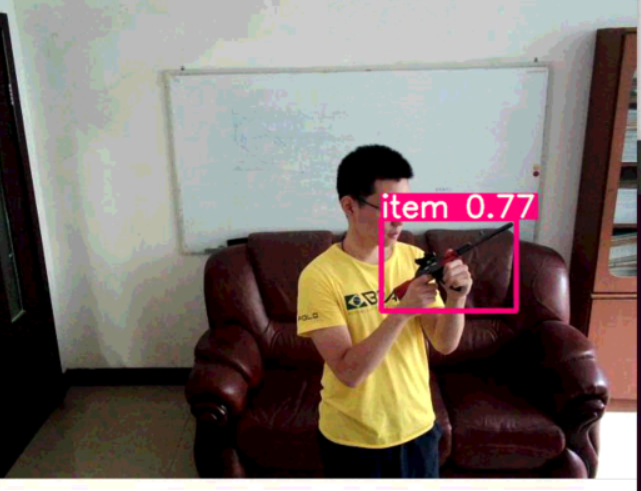
2 实现效果
检测展示
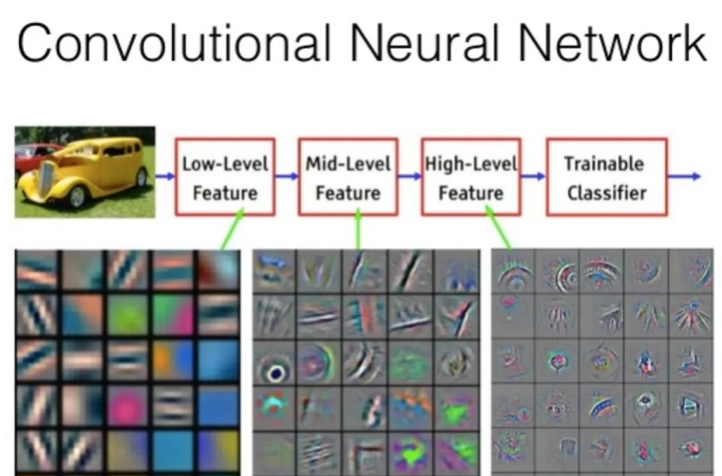
3 卷积神经网络
简介
卷积神经网络 (CNN)
是一种算法,将图像作为输入,然后为图像的所有方面分配权重和偏差,从而区分彼此。神经网络可以通过使用成批的图像进行训练,每个图像都有一个标签来识别图像的真实性质(这里是猫或狗)。一个批次可以包含十分之几到数百个图像。
对于每张图像,将网络预测与相应的现有标签进行比较,并评估整个批次的网络预测与真实值之间的距离。然后,修改网络参数以最小化距离,从而增加网络的预测能力。类似地,每个批次的训练过程都是类似的。
相关代码实现
cnn卷积神经网络的编写如下,编写卷积层、池化层和全连接层的代码
conv1_1 = tf.layers.conv2d(x, 16, (3, 3), padding='same', activation=tf.nn.relu, name='conv1_1')
conv1_2 = tf.layers.conv2d(conv1_1, 16, (3, 3), padding='same', activation=tf.nn.relu, name='conv1_2')
pool1 = tf.layers.max_pooling2d(conv1_2, (2, 2), (2, 2), name='pool1')
conv2_1 = tf.layers.conv2d(pool1, 32, (3, 3), padding='same', activation=tf.nn.relu, name='conv2_1')
conv2_2 = tf.layers.conv2d(conv2_1, 32, (3, 3), padding='same', activation=tf.nn.relu, name='conv2_2')
pool2 = tf.layers.max_pooling2d(conv2_2, (2, 2), (2, 2), name='pool2')
conv3_1 = tf.layers.conv2d(pool2, 64, (3, 3), padding='same', activation=tf.nn.relu, name='conv3_1')
conv3_2 = tf.layers.conv2d(conv3_1, 64, (3, 3), padding='same', activation=tf.nn.relu, name='conv3_2')
pool3 = tf.layers.max_pooling2d(conv3_2, (2, 2), (2, 2), name='pool3')
conv4_1 = tf.layers.conv2d(pool3, 128, (3, 3), padding='same', activation=tf.nn.relu, name='conv4_1')
conv4_2 = tf.layers.conv2d(conv4_1, 128, (3, 3), padding='same', activation=tf.nn.relu, name='conv4_2')
pool4 = tf.layers.max_pooling2d(conv4_2, (2, 2), (2, 2), name='pool4')flatten = tf.layers.flatten(pool4)
fc1 = tf.layers.dense(flatten, 512, tf.nn.relu)
fc1_dropout = tf.nn.dropout(fc1, keep_prob=keep_prob)
fc2 = tf.layers.dense(fc1, 256, tf.nn.relu)
fc2_dropout = tf.nn.dropout(fc2, keep_prob=keep_prob)
fc3 = tf.layers.dense(fc2, 2, None)
4 Yolov5
我们选择当下YOLO最新的卷积神经网络YOLOv5来进行火焰识别检测。6月9日,Ultralytics公司开源了YOLOv5,离上一次YOLOv4发布不到50天。而且这一次的YOLOv5是完全基于PyTorch实现的!在我们还对YOLOv4的各种高端操作、丰富的实验对比惊叹不已时,YOLOv5又带来了更强实时目标检测技术。按照官方给出的数目,现版本的YOLOv5每个图像的推理时间最快0.007秒,即每秒140帧(FPS),但YOLOv5的权重文件大小只有YOLOv4的1/9。
目标检测架构分为两种,一种是two-stage,一种是one-stage,区别就在于 two-stage 有region
proposal过程,类似于一种海选过程,网络会根据候选区域生成位置和类别,而one-stage直接从图片生成位置和类别。今天提到的 YOLO就是一种
one-stage方法。YOLO是You Only Look Once的缩写,意思是神经网络只需要看一次图片,就能输出结果。YOLO
一共发布了五个版本,其中 YOLOv1 奠定了整个系列的基础,后面的系列就是在第一版基础上的改进,为的是提升性能。
YOLOv5有4个版本性能如图所示:

网络架构图

YOLOv5是一种单阶段目标检测算法,该算法在YOLOv4的基础上添加了一些新的改进思路,使其速度与精度都得到了极大的性能提升。主要的改进思路如下所示:
输入端
在模型训练阶段,提出了一些改进思路,主要包括Mosaic数据增强、自适应锚框计算、自适应图片缩放;
Mosaic数据增强
:Mosaic数据增强的作者也是来自YOLOv5团队的成员,通过随机缩放、随机裁剪、随机排布的方式进行拼接,对小目标的检测效果很不错

基准网络
融合其它检测算法中的一些新思路,主要包括:Focus结构与CSP结构;
Neck网络
在目标检测领域,为了更好的提取融合特征,通常在Backbone和输出层,会插入一些层,这个部分称为Neck。Yolov5中添加了FPN+PAN结构,相当于目标检测网络的颈部,也是非常关键的。


FPN+PAN的结构

这样结合操作,FPN层自顶向下传达强语义特征(High-Level特征),而特征金字塔则自底向上传达强定位特征(Low-
Level特征),两两联手,从不同的主干层对不同的检测层进行特征聚合。
FPN+PAN借鉴的是18年CVPR的PANet,当时主要应用于图像分割领域,但Alexey将其拆分应用到Yolov4中,进一步提高特征提取的能力。
Head输出层
输出层的锚框机制与YOLOv4相同,主要改进的是训练时的损失函数GIOU_Loss,以及预测框筛选的DIOU_nms。
对于Head部分,可以看到三个紫色箭头处的特征图是40×40、20×20、10×10。以及最后Prediction中用于预测的3个特征图:
①==>40×40×255②==>20×20×255③==>10×10×255

-
相关代码
class Detect(nn.Module):stride = None # strides computed during build onnx_dynamic = False # ONNX export parameterdef __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layersuper().__init__()self.nc = nc # number of classesself.no = nc + 5 # number of outputs per anchorself.nl = len(anchors) # number of detection layersself.na = len(anchors[0]) // 2 # number of anchorsself.grid = [torch.zeros(1)] * self.nl # init gridself.anchor_grid = [torch.zeros(1)] * self.nl # init anchor gridself.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output convself.inplace = inplace # use in-place ops (e.g. slice assignment)def forward(self, x):z = [] # inference outputfor i in range(self.nl):x[i] = self.m[i](x[i]) # convbs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()if not self.training: # inferenceif self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)y = x[i].sigmoid()if self.inplace:y[..., 0:2] = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xyy[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # whelse: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953xy = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xywh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # why = torch.cat((xy, wh, y[..., 4:]), -1)z.append(y.view(bs, -1, self.no))return x if self.training else (torch.cat(z, 1), x)def _make_grid(self, nx=20, ny=20, i=0):d = self.anchors[i].deviceif check_version(torch.__version__, '1.10.0'): # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibilityyv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)], indexing='ij')else:yv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)])grid = torch.stack((xv, yv), 2).expand((1, self.na, ny, nx, 2)).float()anchor_grid = (self.anchors[i].clone() * self.stride[i]) \.view((1, self.na, 1, 1, 2)).expand((1, self.na, ny, nx, 2)).float()return grid, anchor_grid
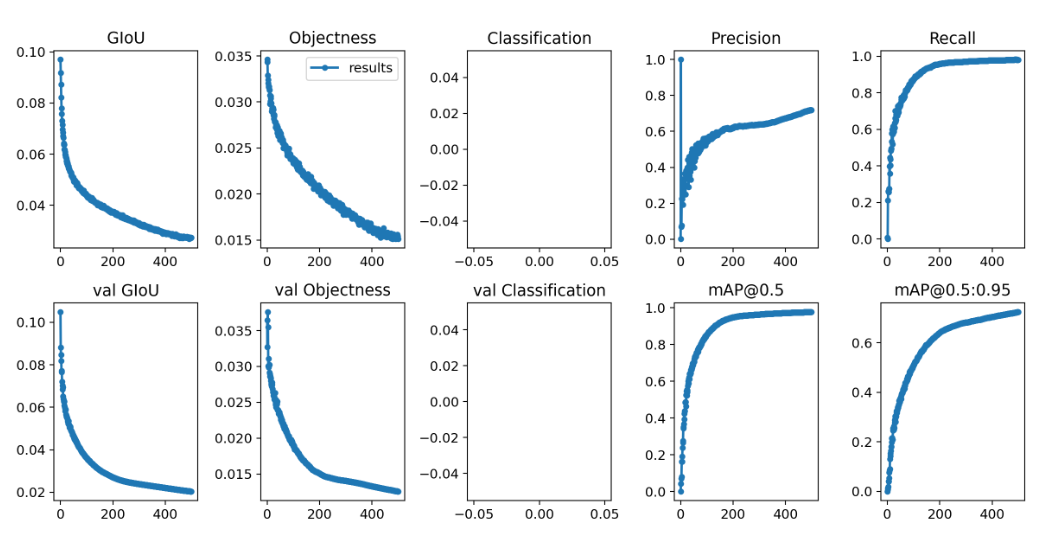
5 模型训练
训练效果如下
相关代码
#部分代码
def train(hyp, opt, device, tb_writer=None):print(f'Hyperparameters {hyp}')log_dir = tb_writer.log_dir if tb_writer else 'runs/evolve' # run directorywdir = str(Path(log_dir) / 'weights') + os.sep # weights directoryos.makedirs(wdir, exist_ok=True)last = wdir + 'last.pt'best = wdir + 'best.pt'results_file = log_dir + os.sep + 'results.txt'epochs, batch_size, total_batch_size, weights, rank = \opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.local_rank# TODO: Use DDP logging. Only the first process is allowed to log.# Save run settingswith open(Path(log_dir) / 'hyp.yaml', 'w') as f:yaml.dump(hyp, f, sort_keys=False)with open(Path(log_dir) / 'opt.yaml', 'w') as f:yaml.dump(vars(opt), f, sort_keys=False)# Configurecuda = device.type != 'cpu'init_seeds(2 + rank)with open(opt.data) as f:data_dict = yaml.load(f, Loader=yaml.FullLoader) # model dicttrain_path = data_dict['train']test_path = data_dict['val']nc, names = (1, ['item']) if opt.single_cls else (int(data_dict['nc']), data_dict['names']) # number classes, namesassert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check# Remove previous resultsif rank in [-1, 0]:for f in glob.glob('*_batch*.jpg') + glob.glob(results_file):os.remove(f)# Create modelmodel = Model(opt.cfg, nc=nc).to(device)# Image sizesgs = int(max(model.stride)) # grid size (max stride)imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples# Optimizernbs = 64 # nominal batch size# default DDP implementation is slow for accumulation according to: https://pytorch.org/docs/stable/notes/ddp.html# all-reduce operation is carried out during loss.backward().# Thus, there would be redundant all-reduce communications in a accumulation procedure,# which means, the result is still right but the training speed gets slower.# TODO: If acceleration is needed, there is an implementation of allreduce_post_accumulation# in https://github.com/NVIDIA/DeepLearningExamples/blob/master/PyTorch/LanguageModeling/BERT/run_pretraining.pyaccumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizinghyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decaypg0, pg1, pg2 = [], [], [] # optimizer parameter groupsfor k, v in model.named_parameters():if v.requires_grad:if '.bias' in k:pg2.append(v) # biaseselif '.weight' in k and '.bn' not in k:pg1.append(v) # apply weight decayelse:pg0.append(v) # all elseif opt.adam:optimizer = optim.Adam(pg0, lr=hyp['lr0'], betas=(hyp['momentum'], 0.999)) # adjust beta1 to momentumelse:optimizer = optim.SGD(pg0, lr=hyp['lr0'], momentum=hyp['momentum'], nesterov=True)optimizer.add_param_group({'params': pg1, 'weight_decay': hyp['weight_decay']}) # add pg1 with weight_decayoptimizer.add_param_group({'params': pg2}) # add pg2 (biases)print('Optimizer groups: %g .bias, %g conv.weight, %g other' % (len(pg2), len(pg1), len(pg0)))del pg0, pg1,
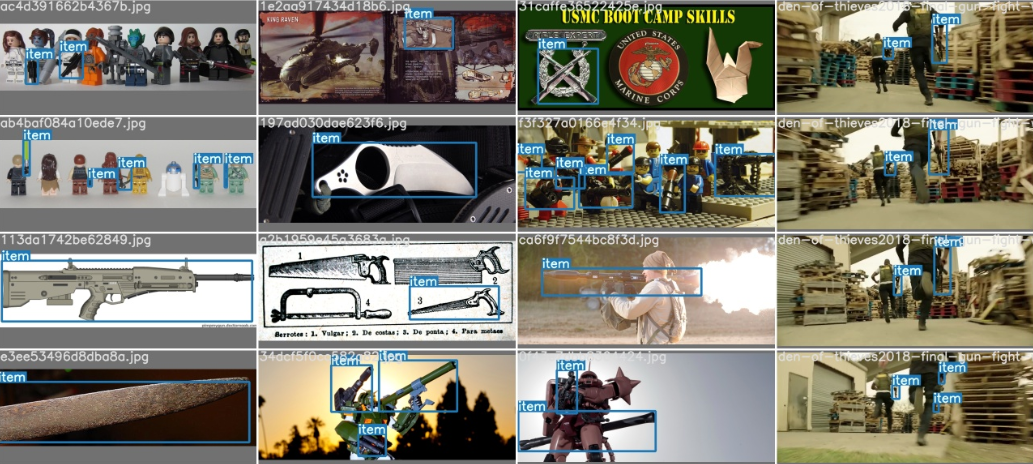
6 实现效果
7 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
深度学习YOLO安检管制物品识别与检测 - python opencv 计算机竞赛
文章目录 0 前言1 课题背景2 实现效果3 卷积神经网络4 Yolov55 模型训练6 实现效果7 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 **基于深度学习YOLO安检管制误判识别与检测 ** 该项目较为新颖,适合作为竞赛课题方向&…...

vite+react+typescript 遇到的问题
1.找不到模块“vite”。你的意思是要将 “moduleResolution” 选项设置为 “node”,还是要将别名添加到 “paths” 选项中 tsconfig.json 中 compilerOptions:{“moduleResolution”: node} 2.未知的编译器选项“allowImportingTsExtensions” 该选项用于控制是否…...
数据结构及八种常用数据结构简介
data-structure 数据结构是一种存在某种关系的元素的集合。“数据” 是指元素;“结构” 是指元素之间存在的关系,分为 “逻辑结构” 和 “物理结构(又称存储结构)”。 常用的数据结构有 数组(array)、栈&…...
)
阿里云配置ssl(Apache)
阿里云申请证书,有个专门的免费的申请方式与普通证书是平级的功能; 访问服务器,判断apache是不是开启ssl功能,如果没有安装就安装它 [rootcentos ~]# rpm -qa | grep mod_ssl //什么没显示说明没装 yum install mod_ssl openssl …...

阿里云linux升级新版本npm、nodejs
在阿里云服务器上编译部署NextJS工程发现 alibaba linux默认yum install npm安装的版本太低, 使用以下方式升级node、npm新版本。 1、卸载现有版本 yum remove nodejs npm -y2、安装新版本 sudo yum install https://rpm.nodesource.com/pub_21.x/nodistro/repo/nodesource-…...

如何在el-tree懒加载并且包含下级的情况下进行数据回显-02
上一篇文章如何在el-tree懒加载并且包含下级的情况下进行数据回显-01对于el-tree懒加载,包含下级的情况下,对于回显提出两种方案,第一种方案有一些难题无法解决,我们重点来说说第二种方案。 第二种方案是使用这个变量对其是否全选…...

Pytorch 网络冻结的三种方法区别:detach、requires_grad、with_no_grad
1、requires_grad requires_gradTrue # 要求计算梯度; requires_gradFalse # 不要求计算梯度;在pytorch中,tensor有一个 requires_grad参数,如果设置为True,那么它会追踪对于该张量的所有操作。在完成计算时可以通过调…...
如何定位el-tree中的树节点当父元素滚动时如何定位子元素
使用到的方法 Element 接口的 scrollIntoView() 方法会滚动元素的父容器,使被调用 scrollIntoView() 的元素对用户可见。 参数 alignToTop可选 一个布尔值: 如果为 true,元素的顶端将和其所在滚动区的可视区域的顶端对齐。相应的 scrollIntoV…...

【WiFI问题自助】解决WiFi能连上但是没有网的问题
WiFi能连上但是没有网的问题 背景:wifi能连上,但是没有网 解决 遇事不决,先重启啊!怎么重启?拔掉电源再插上!拔掉网线再插上! 直接ok了。 思考记录 今天WiFi又上不了网了,昨天报…...
论文阅读:JINA EMBEDDINGS: A Novel Set of High-Performance Sentence Embedding Models
Abstract JINA EMBEDINGS构成了一组高性能的句子嵌入模型,擅长将文本输入转换为数字表示,捕捉文本的语义。这些模型在密集检索和语义文本相似性等应用中表现出色。文章详细介绍了JINA EMBEDINGS的开发,从创建高质量的成对(pairwi…...

计数排序.
一.定义: 计数排序(Counting Sort)是一种非比较性质的排序算法,其时间复杂度为O(nk)(其中n为待排序的元素个数,k为不同值的个数)。这意味着在数据值范围不大并且离散分布的情况下,规…...

flink中配置Rockdb的重要配置项
背景 由于我们在flink中使用了状态比较大,无法完全把状态数据存放到tm的堆内存中,所以我们选择了把状态存放到rockdb上,也就是使用rockdb作为状态后端存储,本文就是简单记录下使用rockdb状态后端存储的几个重要的配置项 使用rockdb状态后端…...

代码随想录二刷 | 数组 | 有序数组的平方
代码随想录二刷 | 数组 | 有序数组的平方 题目描述题目分析 & 代码实现暴力排序双指针法 题目描述 977.有序数组的平方 给你一个按 非递减顺序 排序的整数数组 nums,返回 每个数字的平方 组成的新数组,要求也按 非递减顺序 …...

基于单片机C51全自动洗衣机仿真设计
**单片机设计介绍, 基于单片机C51全自动洗衣机仿真设计 文章目录 一 概要二、功能设计设计思路 三、 软件设计原理图 五、 程序六、 文章目录 一 概要 基于单片机C51的全自动洗衣机仿真设计是一个复杂的项目,它涉及到硬件和软件的设计和实现。以下是对这…...

「Verilog学习笔记」实现3-8译码器①
专栏前言 本专栏的内容主要是记录本人学习Verilog过程中的一些知识点,刷题网站用的是牛客网 分析 ① 本题要求根据38译码器的功能表实现该电路,同时要求采用基础逻辑门实现,那么就需要将功能表转换为逻辑表达式。 timescale 1ns/1nsmodule d…...

Centos(Linux)服务器安装Dotnet8 及 常见问题解决
1. 下载dotnet8 sdk 下载 .NET 8.0 SDK (v8.0.100) - Linux x64 Binaries 拿到 dotnet-sdk-8.0.100-linux-x64.tar.gz 文件 2. 把文件上传到 /usr/local/software 目录 mkdir -p /usr/local/software/dotnet8 把文件拷贝过去 mv dotnet-sdk-8.0.100-linux-x64.tar.gz /usr/loc…...
最强人工智能ChatGPT引领AIGC发展
从公众号转载,关注微信公众号掌握更多技术动态 --------------------------------------------------------------- ——AI不会淘汰所有人,但会淘汰不懂AI的人 一、最强人工智能GPT-4 Turbo 在前不久的OpenAI开发者大会,正值Chatgpt3.5发布一…...

10.Oracle的同义词与序列
oracle11g的同义词与序列 一、Oracle同义词:1、同义词的基本使用2、同义词的相关权限3、同义词的作用范围 二、Oracle序列:1、序列的基本操作2、序列的相关权限 一、Oracle同义词: 同义词是一个数据库对象的别名,它允许用户通过不…...

【周报2023-11-10】
周报2023-11-10 本周的主要工作下周工作计划 本周的主要工作 本周的主要工作就有三个 第一个是进行对我们目前的高企项目的完善情况第二个是对于高企项目的接口对接情况以及细节的把控第三个为新的小程序项目做准备工作 首先第一个高企项目的完善情况得话主要是页面上 对于原…...

搜维尔科技:业内普遍选择Varjo头显作为医疗VR/AR/XR解决方案
Varjo 的人眼分辨率混合现实和虚拟现实头显将医疗专业人员的注意力和情感投入提升到更高水平。借助逼真的 XR/VR,医疗和保健人员可以为最具挑战性的现实场景做好准备! 在虚拟、增强和混合现实中进行最高水平的训练和表现 以逼真的 3D 方式可视化医疗数据…...
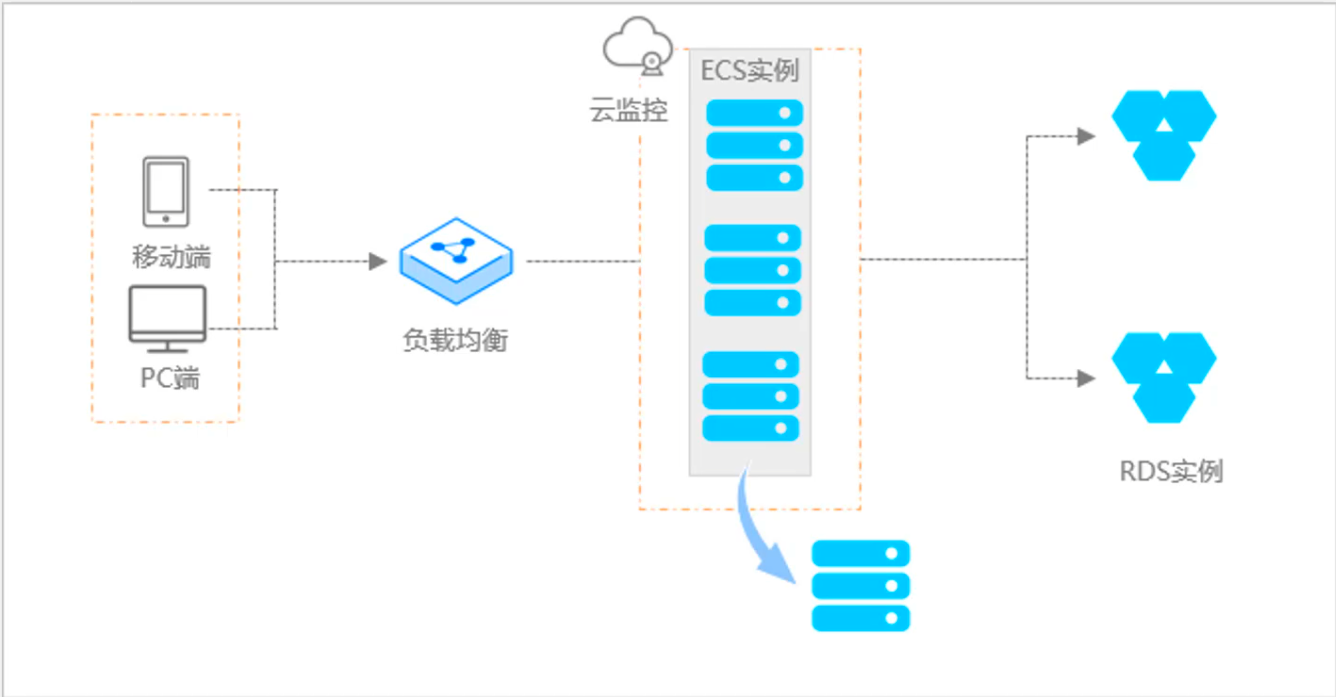
阿里云ACP云计算备考笔记 (5)——弹性伸缩
目录 第一章 概述 第二章 弹性伸缩简介 1、弹性伸缩 2、垂直伸缩 3、优势 4、应用场景 ① 无规律的业务量波动 ② 有规律的业务量波动 ③ 无明显业务量波动 ④ 混合型业务 ⑤ 消息通知 ⑥ 生命周期挂钩 ⑦ 自定义方式 ⑧ 滚的升级 5、使用限制 第三章 主要定义 …...
Map相关知识
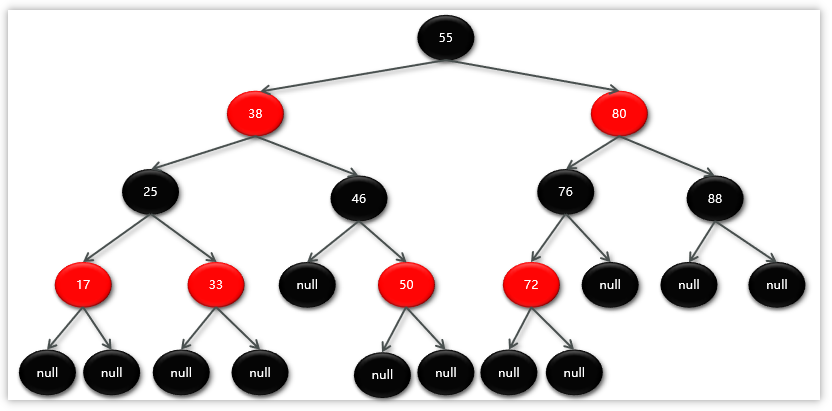
数据结构 二叉树 二叉树,顾名思义,每个节点最多有两个“叉”,也就是两个子节点,分别是左子 节点和右子节点。不过,二叉树并不要求每个节点都有两个子节点,有的节点只 有左子节点,有的节点只有…...

智能分布式爬虫的数据处理流水线优化:基于深度强化学习的数据质量控制
在数字化浪潮席卷全球的今天,数据已成为企业和研究机构的核心资产。智能分布式爬虫作为高效的数据采集工具,在大规模数据获取中发挥着关键作用。然而,传统的数据处理流水线在面对复杂多变的网络环境和海量异构数据时,常出现数据质…...

dify打造数据可视化图表
一、概述 在日常工作和学习中,我们经常需要和数据打交道。无论是分析报告、项目展示,还是简单的数据洞察,一个清晰直观的图表,往往能胜过千言万语。 一款能让数据可视化变得超级简单的 MCP Server,由蚂蚁集团 AntV 团队…...
安装docker)
Linux离线(zip方式)安装docker
目录 基础信息操作系统信息docker信息 安装实例安装步骤示例 遇到的问题问题1:修改默认工作路径启动失败问题2 找不到对应组 基础信息 操作系统信息 OS版本:CentOS 7 64位 内核版本:3.10.0 相关命令: uname -rcat /etc/os-rele…...
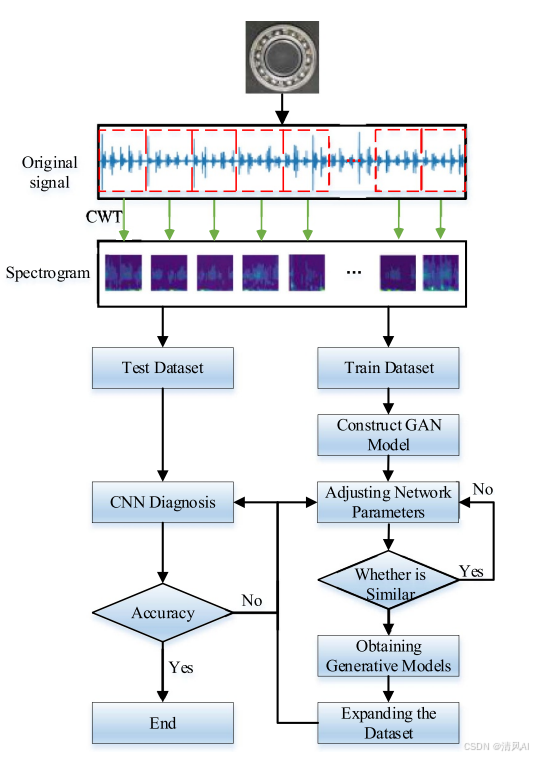
基于IDIG-GAN的小样本电机轴承故障诊断
目录 🔍 核心问题 一、IDIG-GAN模型原理 1. 整体架构 2. 核心创新点 (1) 梯度归一化(Gradient Normalization) (2) 判别器梯度间隙正则化(Discriminator Gradient Gap Regularization) (3) 自注意力机制(Self-Attention) 3. 完整损失函数 二…...
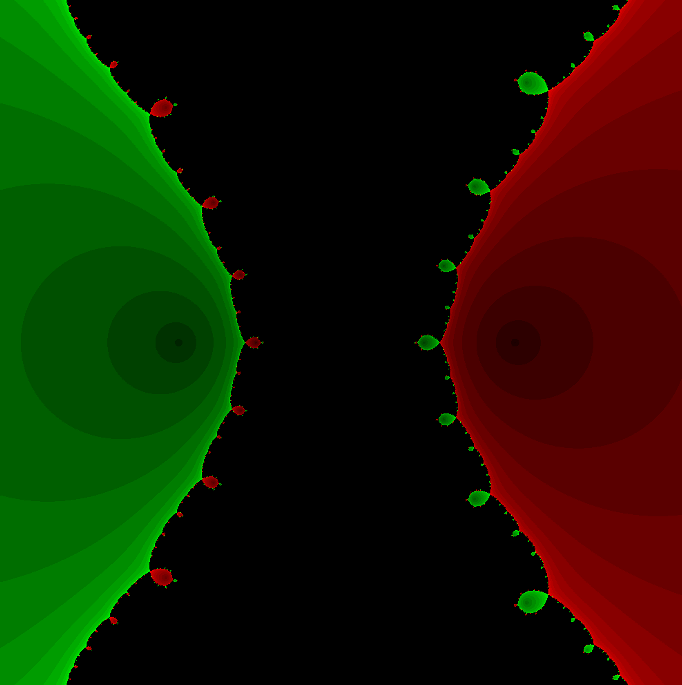
在Mathematica中实现Newton-Raphson迭代的收敛时间算法(一般三次多项式)
考察一般的三次多项式,以r为参数: p[z_, r_] : z^3 (r - 1) z - r; roots[r_] : z /. Solve[p[z, r] 0, z]; 此多项式的根为: 尽管看起来这个多项式是特殊的,其实一般的三次多项式都是可以通过线性变换化为这个形式…...
mac 安装homebrew (nvm 及git)
mac 安装nvm 及git 万恶之源 mac 安装这些东西离不开Xcode。及homebrew 一、先说安装git步骤 通用: 方法一:使用 Homebrew 安装 Git(推荐) 步骤如下:打开终端(Terminal.app) 1.安装 Homebrew…...

在鸿蒙HarmonyOS 5中使用DevEco Studio实现指南针功能
指南针功能是许多位置服务应用的基础功能之一。下面我将详细介绍如何在HarmonyOS 5中使用DevEco Studio实现指南针功能。 1. 开发环境准备 确保已安装DevEco Studio 3.1或更高版本确保项目使用的是HarmonyOS 5.0 SDK在项目的module.json5中配置必要的权限 2. 权限配置 在mo…...

负载均衡器》》LVS、Nginx、HAproxy 区别
虚拟主机 先4,后7...