ROS第一个程序——helloworld
目录
一、工作空间的创建
1.创建工作空间并初始化
2.进入 src 创建 ros 包并添加依赖
二、C++实现helloworld
C++源码实现
编辑 ros 包下的 Cmakelist.txt文件
进入工作空间目录并编译
执行
三、python实现helloworld
进入 ros 包添加 scripts 目录并编辑 python 文件
新建 python 文件
为 python 文件添加可执行权限
编辑 ros 包下的 CamkeList.txt 文件
进入工作空间目录并编译
执行
一、工作空间的创建
1.创建工作空间并初始化
mkdir -p 自定义空间名称/src
cd 自定义空间名称
catkin_make
首先会创建一个工作空间以及一个 src 子目录,然后再进入工作空间调用 catkin_make命令编译。
2.进入 src 创建 ros 包并添加依赖
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。

二、C++实现helloworld
cd 自定义的包
C++源码实现
#include "ros/ros.h"int main(int argc, char *argv[])
{//执行 ros 节点初始化ros::init(argc,argv,"hello");//创建 ros 节点句柄(非必须)ros::NodeHandle n;//控制台输出 hello worldROS_INFO("hello world!");return 0;
}
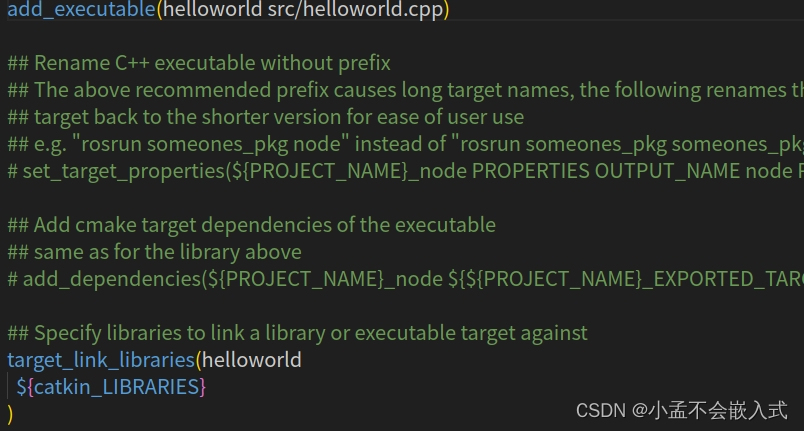
编辑 ros 包下的 Cmakelist.txt文件
add_executable(步骤3的源文件名src/步骤3的源文件名.cpp
)
target_link_libraries(步骤3的源文件名${catkin_LIBRARIES}
)
进入工作空间目录并编译
cd 自定义空间名称
catkin_make
执行
先启动命令行1:
roscore
再启动命令行2:
cd 工作空间
source ./devel/setup.bash
rosrun 包名 C++节点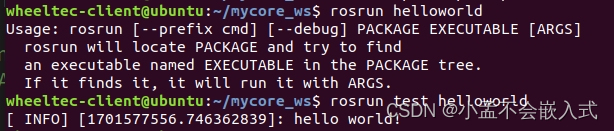
三、python实现helloworld
进入 ros 包添加 scripts 目录并编辑 python 文件
cd ros包
mkdir scripts
新建 python 文件
#! /usr/bin/env pythonimport rospyif __name__ == "__main__":rospy.init_node("Hello")rospy.loginfo("Hello World!!!!")为 python 文件添加可执行权限
chmod +x 自定义文件名.py
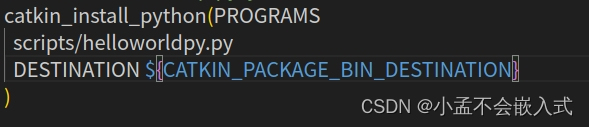
编辑 ros 包下的 CamkeList.txt 文件
catkin_install_python(PROGRAMS scripts/自定义文件名.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
进入工作空间目录并编译
先启动命令行1:
roscore
再启动命令行2:
cd 工作空间
source ./devel/setup.bash
rosrun 包名 自定义文件名.py执行

相关文章:
ROS第一个程序——helloworld
目录 一、工作空间的创建 1.创建工作空间并初始化 2.进入 src 创建 ros 包并添加依赖 二、C实现helloworld C源码实现 编辑 ros 包下的 Cmakelist.txt文件 进入工作空间目录并编译 执行 三、python实现helloworld 进入 ros 包添加 scripts 目录并编辑 python 文件 …...

【Python 训练营】N_17 冒泡排序
题目 列表L [3,2,5,6,1,3,8,1,9],冒泡排序实现从小到大排列。 分析 冒泡排序的基本思想是从序列的第一个元素开始,依次比较相邻的两个元素,如果它们的顺序错误就交换它们的位置,直到整个序列有序为止。具体步骤如下࿱…...

虚拟机docker中的Nginx部署
Nginx部署 : 1.搜索nginx镜像 docker search nginx 2.拉取nginx镜像 docker pull nginx 3.创建目录 mkdir nginx cd nginx mkdir conf cd conf vim nginx.conf 4.编写nginx.conf配置文件 user nginx; worker_processes 1; error_log /var/log/nginx/erro…...

06、pytest将多个测试放在一个类中
官方用例 # content of test_class.py # 实例1 class TestClass:def test_one(self):x "this"assert "h" in xdef test_two(self):x "hello"assert hasattr(x,"check")# content of test_class_demo.py # 每个测试都有唯一的类实例…...

实体类转SQL工具类
主要的目标是简化开发人员在有实体类的情况下时做的重复性工作,提高开发效率。 单个实体类的转换工具类 1.EntityToTableConverter工具类 import java.io.FileWriter; import java.io.IOException; import java.lang.reflect.Field; import java.math.BigDecimal…...

高端制造业中的通用性超精密3D光学测量仪器
超精密光学3D测量仪器具有高精度、自动化程度高、实时反馈和范围广等优势。它能够实现微米级别的精确测量,能够精确测量产品的尺寸、形状和表面粗糙度等,具有广泛的应用价值和重要意义。 超精密光学3D测量仪器配备多种传感器、控制器和计算机系统&#…...

微信公众号非静默授权获取头像和昵称
要在Vue前端应用程序中实现微信公众号非静默授权获取头像和昵称,您需要遵循以下步骤: 1.在微信公众平台上注册并创建一个公众号。 2.在Vue项目中安装wechat-js-sdk库,该库提供了与微信JS-SDK的交互功能。 npm install wechat-js-sdk --sav…...

Java项目学生管理系统四编辑学生
编辑学生 欢迎阅读本篇博客,今天我们将继续探索Java项目学生管理系统的功能,重点关注学生信息的修改模块。在学生管理系统中,修改学生信息是一个关键操作,通过该功能可以方便地更新学生的个人信息、成绩以及其他相关数据。通过本…...
)
不同数据库进行同步和增量数据(SQL server 与MySQL数据库为例)
场景 最近在做的一个项目需要将远程服务器的SQL server数据库中表的数据传输到本机的MySQL数据库中,并且远程的SQL server数据库表的数据会实时进行更新,并且差不多是一分钟内传输18条数据,例如现在是2023-12-4 15:09,在15:08这个…...
国内的几款强大的AI智能—AI语言模型
R5Ai智能助手是一款由百度研发的文心一言,它支持gpt4 / gpt-3.5 / claude,也支持AI绘画,每天提供十次免费使用机会,无需魔法。该智能助手具有以下优点:会画画,没有使用次数限制,可以在界面上找到…...

linux下恶意软件的七种反分析技术
7 类主流的 Linux 恶意软件反分析/检测躲避技术 反调试(Anti-Debug): 软件调试是恶意软件分析的常⽤⼿段之⼀,但恶意软件可以通过识别调试器特征,实现⾃⾝恶意⾏为的隐藏,或导致调试失败,从⽽规避分析与检测…...

Spring Security OAuth2 认证服务器自定义异常处理
目录 前言WebResponseExceptionTranslator自定义异常处理1、自定义我们响应实体类2、定义响应结果枚举类3、自定义异常转换类4、配置自定义异常转换器5、测试 前言 Spring Security OAuth2 认证失败的格式如下 {"error": "unsupported_grant_type","…...

selenium环境安装
一、下载安装python 下载python安装python设置python环境变量安装selenium (1)下载python 您可以从Python官方网站(https://www.python.org/downloads/)下载Python。在页面上,您将看到不同版本的Python供您选择。根…...
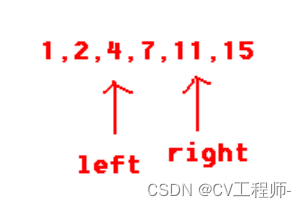
(C++)和为s的两个数字--双指针算法
个人主页:Lei宝啊 愿所有美好如期而遇 和为S的两个数字_牛客题霸_牛客网输入一个升序数组 array 和一个数字S,在数组中查找两个数,使得他们的和正好是S,如果。题目来自【牛客题霸】https://www.nowcoder.com/practice/390da4f7a…...
应用开发——构建页面(题目答案))
鸿蒙(HarmonyOS)应用开发——构建页面(题目答案)
判断题 1.在Column容器中的子组件默认是按照从上到下的垂直方向布局的,其主轴的方向是垂直方向,在Row容器中的组件默认是按照从左到右的水平方向布局的,其主轴的方向是水平方向。 正确(True) 2.List容器可以沿水平方向排列,也可…...

Python基础快速过一遍
文章目录 一、变量及基本概念1、变量2、变量类型3、变量格式化输出4、type()函数5、input()函数6、类型转换函数7、注释 二、Python运算/字符1、算数运算2、比较运算3、逻辑运算4、赋值运算符5、转义字符6、成员运算符 三、判断/循环语句1、if判断语句2、while循环语句3、for循…...

等保测评报价相差很大,里面有什么门道
等保测评报价的差异主要源于以下几点: 服务质量评估标准不同:不同的测评机构在测评过程中所提供的服务范围、深度、细节等方面可能存在差异,因此导致报价有所不同。一些机构可能提供全面且细致的测评服务,致力于提供高质量的等保测…...
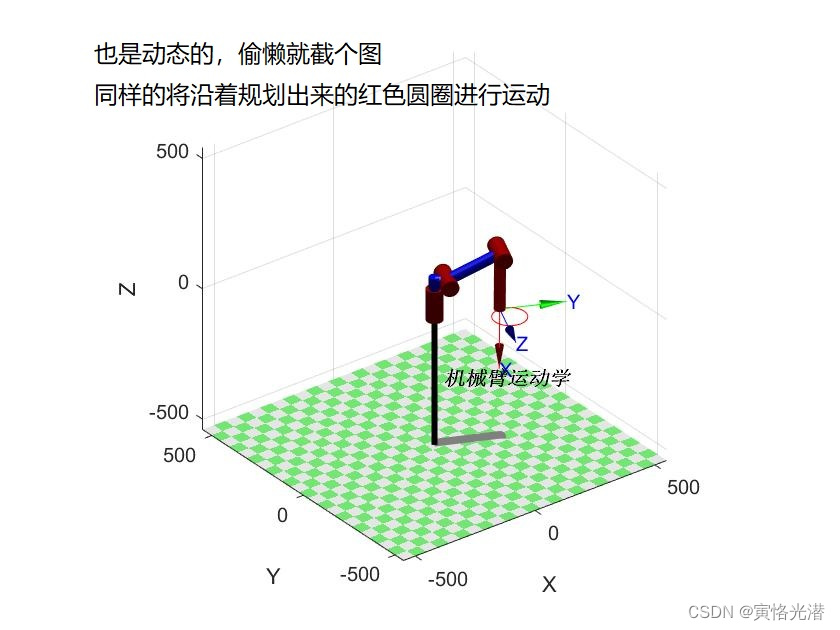
MATLAB的rvctools工具箱熟悉运动学【机械臂机器人示例】
1、rvctools下载安装 rvctools下载地址:rvctools下载 截图如下,点击红色箭头指示的“Download Shared Folder” 即可下载 下载之后进行解压,解压到D:\MATLAB\toolbox这个工具箱目录,这个安装路径根据自己的情况来选择,…...

如何精准操作无人机自动停机坪?
无人机自动停机坪通过自主导航和避障功能,实现了无人机的自主降落和起飞,在无人机技术领域起到了至关重要的作用。停机坪不仅仅是无人机的起降平台,还具备自动换电或充电等功能,为无人机的自动化提供了关键支持。为更有效地操作无…...
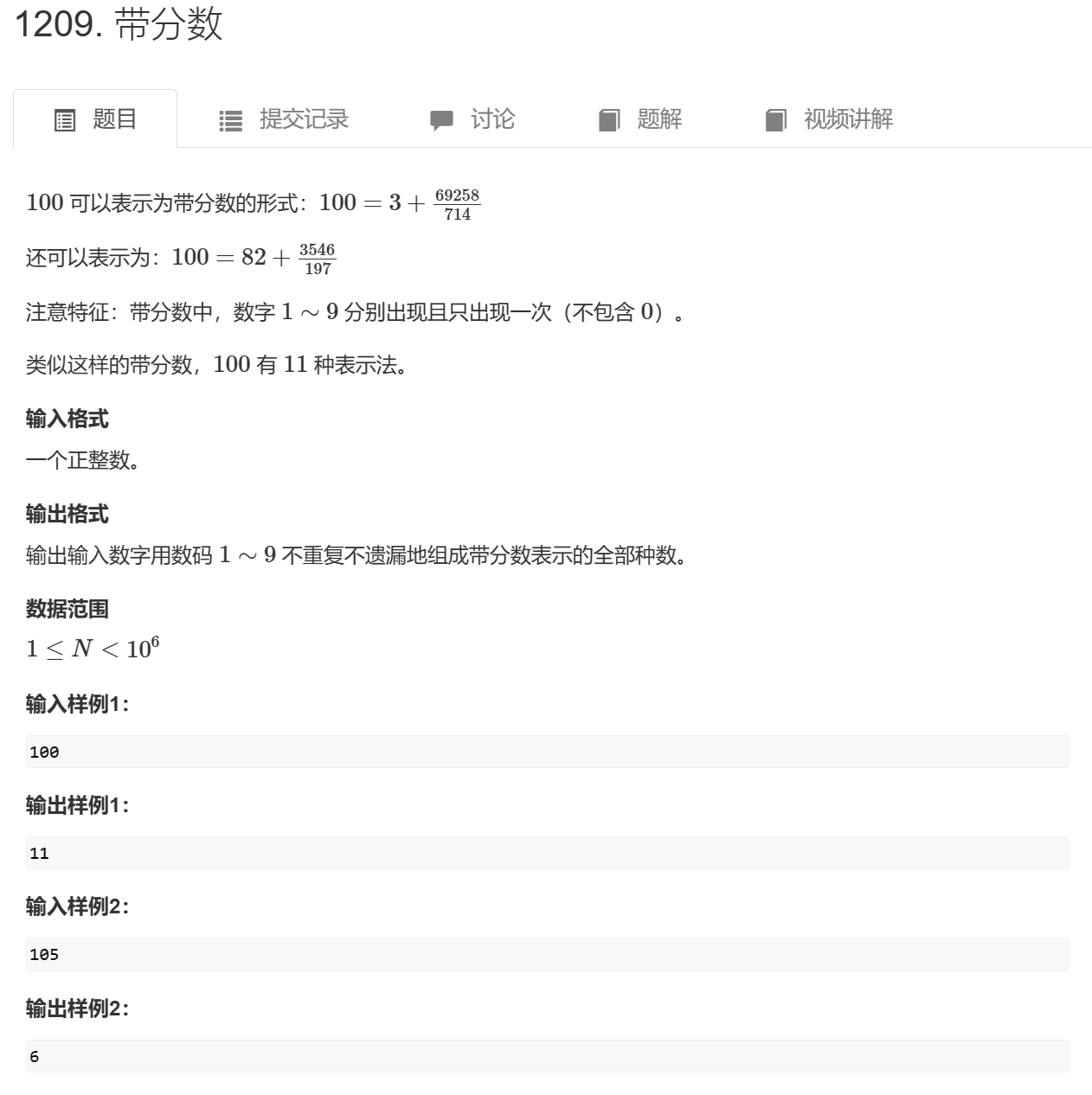
【蓝桥杯】带分数
带分数 题目要求用一个ab/c的形式得到一个值,而且只能在1~9里面不重复的组合。 可以对1~9进行全排列,然后不断划分区间。 #include<iostream> #include<vector> using namespace std; int st[15]; int num[15]; int res; int n;int calc(i…...
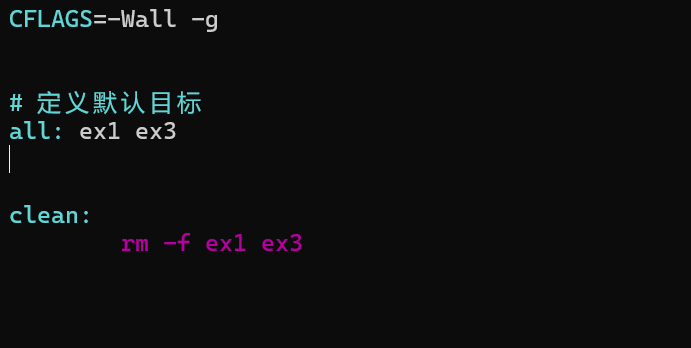
YSYX学习记录(八)
C语言,练习0: 先创建一个文件夹,我用的是物理机: 安装build-essential 练习1: 我注释掉了 #include <stdio.h> 出现下面错误 在你的文本编辑器中打开ex1文件,随机修改或删除一部分,之后…...
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility 1. 实验室环境1.1 实验室环境1.2 小测试 2. The Endor System2.1 部署应用2.2 检查现有策略 3. Cilium 策略实体3.1 创建 allow-all 网络策略3.2 在 Hubble CLI 中验证网络策略源3.3 …...
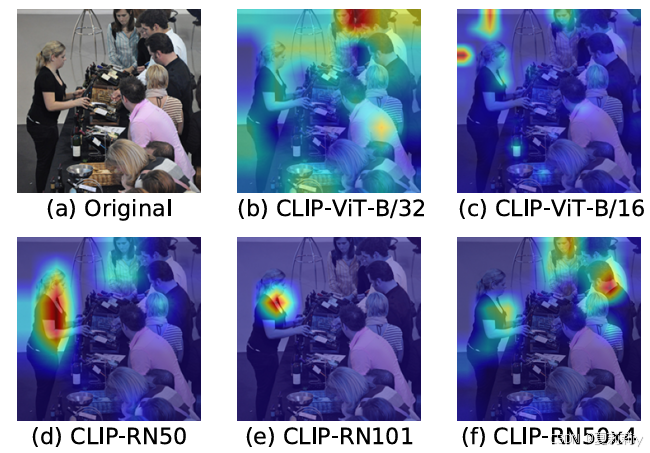
[ICLR 2022]How Much Can CLIP Benefit Vision-and-Language Tasks?
论文网址:pdf 英文是纯手打的!论文原文的summarizing and paraphrasing。可能会出现难以避免的拼写错误和语法错误,若有发现欢迎评论指正!文章偏向于笔记,谨慎食用 目录 1. 心得 2. 论文逐段精读 2.1. Abstract 2…...

Robots.txt 文件
什么是robots.txt? robots.txt 是一个位于网站根目录下的文本文件(如:https://example.com/robots.txt),它用于指导网络爬虫(如搜索引擎的蜘蛛程序)如何抓取该网站的内容。这个文件遵循 Robots…...
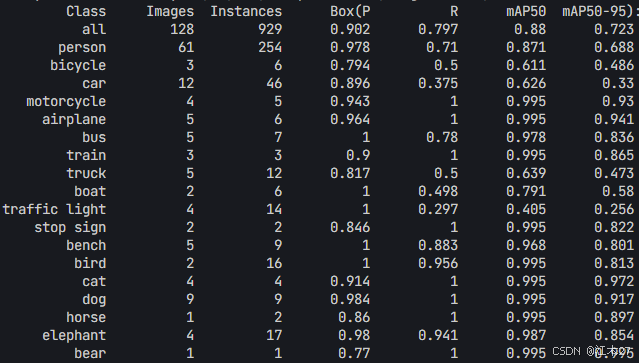
Yolov8 目标检测蒸馏学习记录
yolov8系列模型蒸馏基本流程,代码下载:这里本人提交了一个demo:djdll/Yolov8_Distillation: Yolov8轻量化_蒸馏代码实现 在轻量化模型设计中,**知识蒸馏(Knowledge Distillation)**被广泛应用,作为提升模型…...

动态 Web 开发技术入门篇
一、HTTP 协议核心 1.1 HTTP 基础 协议全称 :HyperText Transfer Protocol(超文本传输协议) 默认端口 :HTTP 使用 80 端口,HTTPS 使用 443 端口。 请求方法 : GET :用于获取资源,…...
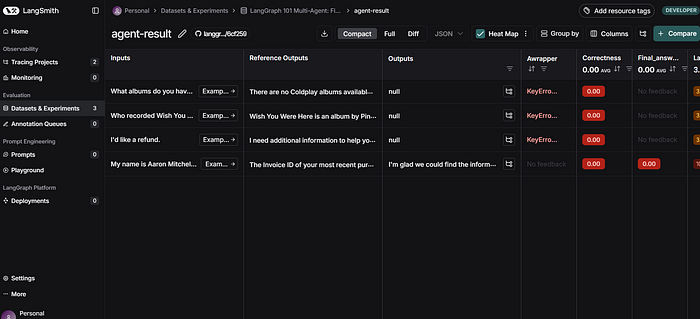
使用LangGraph和LangSmith构建多智能体人工智能系统
现在,通过组合几个较小的子智能体来创建一个强大的人工智能智能体正成为一种趋势。但这也带来了一些挑战,比如减少幻觉、管理对话流程、在测试期间留意智能体的工作方式、允许人工介入以及评估其性能。你需要进行大量的反复试验。 在这篇博客〔原作者&a…...
【JVM面试篇】高频八股汇总——类加载和类加载器
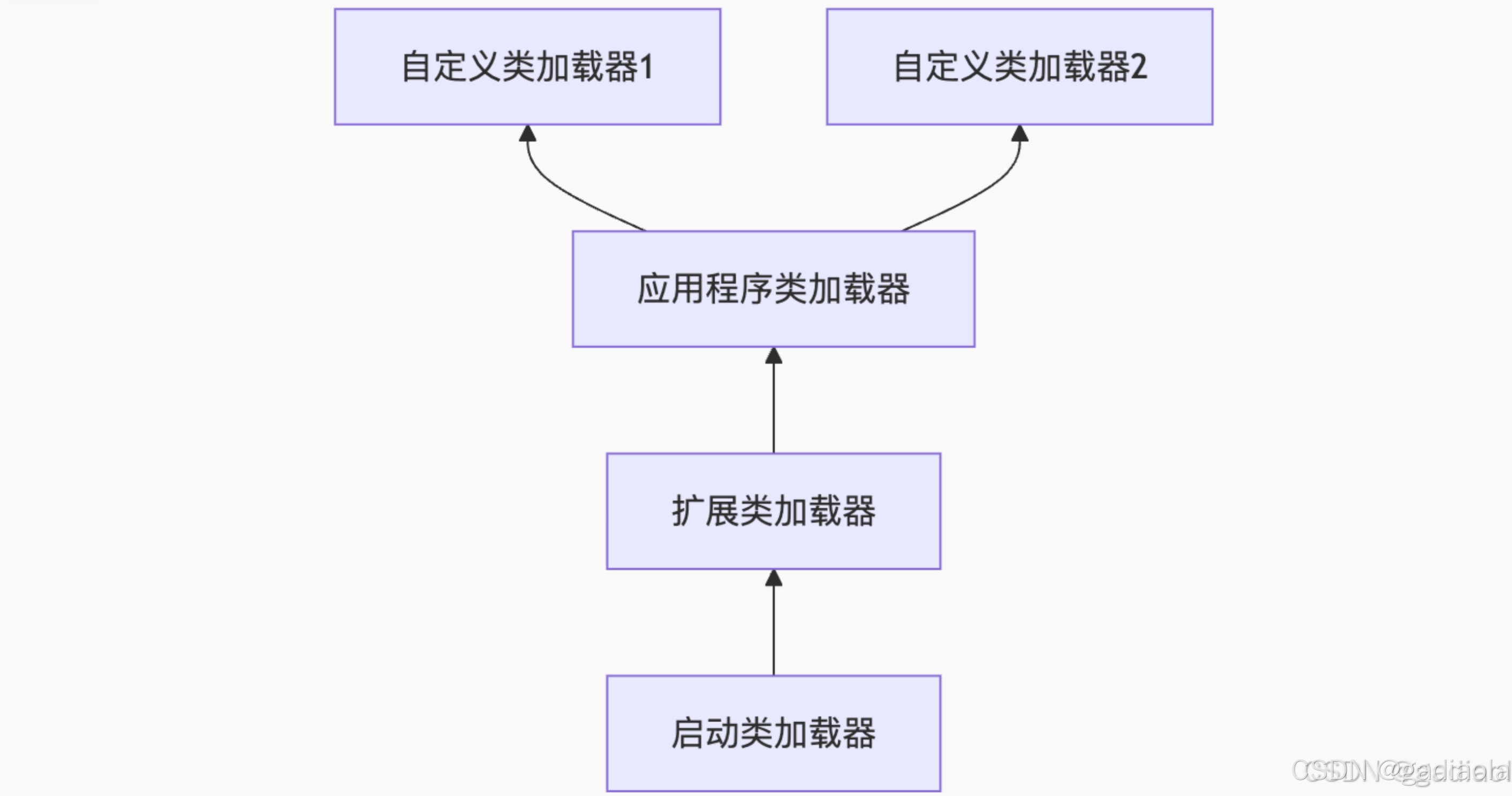
目录 1. 讲一下类加载过程? 2. Java创建对象的过程? 3. 对象的生命周期? 4. 类加载器有哪些? 5. 双亲委派模型的作用(好处)? 6. 讲一下类的加载和双亲委派原则? 7. 双亲委派模…...

苹果AI眼镜:从“工具”到“社交姿态”的范式革命——重新定义AI交互入口的未来机会
在2025年的AI硬件浪潮中,苹果AI眼镜(Apple Glasses)正在引发一场关于“人机交互形态”的深度思考。它并非简单地替代AirPods或Apple Watch,而是开辟了一个全新的、日常可接受的AI入口。其核心价值不在于功能的堆叠,而在于如何通过形态设计打破社交壁垒,成为用户“全天佩戴…...

水泥厂自动化升级利器:Devicenet转Modbus rtu协议转换网关
在水泥厂的生产流程中,工业自动化网关起着至关重要的作用,尤其是JH-DVN-RTU疆鸿智能Devicenet转Modbus rtu协议转换网关,为水泥厂实现高效生产与精准控制提供了有力支持。 水泥厂设备众多,其中不少设备采用Devicenet协议。Devicen…...