BiseNet实现遥感影像地物分类
遥感地物分类通过对遥感图像中的地物进行准确识别和分类,为资源管理、环境保护、城市规划、灾害监测等领域提供重要信息,有助于实现精细化管理和科学决策,提升社会治理和经济发展水平。深度学习遥感地物分类在提高分类精度、自动化程度、处理大规模数据、普适性以及推动遥感技术创新和发展等方面都具有重要的意义。本文将利用深度学习BiseNet实现遥感地物分类。
数据集
本文使用的数据集为WHDLD数据集[1](Wuhan dense labeling dataset)。WHDLD数据集包括4940张高分辨率遥感影像,包含6种土地覆盖类型,影像尺寸均被裁剪至256×256像素。下面是一些数据集示例。 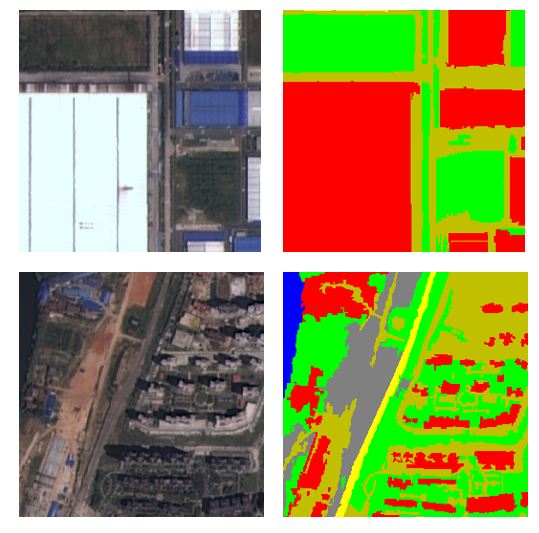
BiSeNet
BiseNet[2](Bilateral Segmentation Network)是一种用于图像分割的深度学习网络。它具有双边分割的特点,可以同时处理空间信息和上下文信息,从而实现高效、准确的图像分割。
具体来说,BiseNet由两个分支组成:空间路径(spatial path)和上下文路径(context path)。其中,空间路径具有较小的感受野,可以捕获丰富的空间信息并生成高分辨率的特征图;而上下文路径则具有较大的感受野,可以捕获更多的上下文信息并生成低分辨率的特征图。这两个路径通过一个特征融合模块进行融合,从而生成既包含丰富空间信息又包含上下文信息的分割结果。
在BiseNet中,还有一些关键的技术和设计,如轻量级模型设计、注意力机制、特征融合等,这些技术和设计可以进一步提升网络的性能和效率。 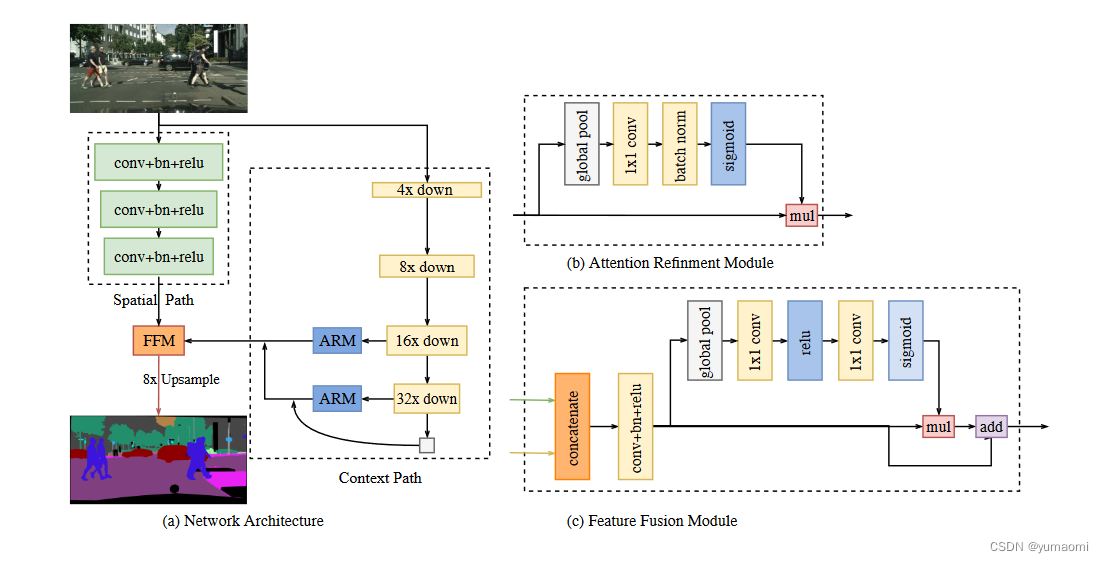
网络复现
resnet18
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.model_zoo as modelzoo
resnet18_url = 'https://download.pytorch.org/models/resnet18-5c106cde.pth'
from torch.nn import BatchNorm2d
def conv3x3(in_planes, out_planes, stride=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class BasicBlock(nn.Module):
def __init__(self, in_chan, out_chan, stride=1):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(in_chan, out_chan, stride)
self.bn1 = BatchNorm2d(out_chan)
self.conv2 = conv3x3(out_chan, out_chan)
self.bn2 = BatchNorm2d(out_chan)
self.relu = nn.ReLU(inplace=True)
self.downsample = None
if in_chan != out_chan or stride != 1:
self.downsample = nn.Sequential(
nn.Conv2d(in_chan, out_chan,
kernel_size=1, stride=stride, bias=False),
BatchNorm2d(out_chan),
)
def forward(self, x):
residual = self.conv1(x)
residual = self.bn1(residual)
residual = self.relu(residual)
residual = self.conv2(residual)
residual = self.bn2(residual)
shortcut = x
if self.downsample is not None:
shortcut = self.downsample(x)
out = shortcut + residual
out = self.relu(out)
return out
def create_layer_basic(in_chan, out_chan, bnum, stride=1):
layers = [BasicBlock(in_chan, out_chan, stride=stride)]
for i in range(bnum-1):
layers.append(BasicBlock(out_chan, out_chan, stride=1))
return nn.Sequential(*layers)
class Resnet18(nn.Module):
def __init__(self):
super(Resnet18, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = create_layer_basic(64, 64, bnum=2, stride=1)
self.layer2 = create_layer_basic(64, 128, bnum=2, stride=2)
self.layer3 = create_layer_basic(128, 256, bnum=2, stride=2)
self.layer4 = create_layer_basic(256, 512, bnum=2, stride=2)
self.init_weight()
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
feat8 = self.layer2(x) # 1/8
feat16 = self.layer3(feat8) # 1/16
feat32 = self.layer4(feat16) # 1/32
return feat8, feat16, feat32
def init_weight(self):
state_dict = modelzoo.load_url(resnet18_url)
self_state_dict = self.state_dict()
for k, v in state_dict.items():
if 'fc' in k: continue
self_state_dict.update({k: v})
self.load_state_dict(self_state_dict)
def get_params(self):
wd_params, nowd_params = [], []
for name, module in self.named_modules():
if isinstance(module, (nn.Linear, nn.Conv2d)):
wd_params.append(module.weight)
if not module.bias is None:
nowd_params.append(module.bias)
elif isinstance(module, nn.modules.batchnorm._BatchNorm):
nowd_params += list(module.parameters())
return wd_params, nowd_params
BiSeNet
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
from .resnet import Resnet18
from torch.nn import BatchNorm2d
class ConvBNReLU(nn.Module):
def __init__(self, in_chan, out_chan, ks=3, stride=1, padding=1, *args, **kwargs):
super(ConvBNReLU, self).__init__()
self.conv = nn.Conv2d(in_chan,
out_chan,
kernel_size = ks,
stride = stride,
padding = padding,
bias = False)
self.bn = BatchNorm2d(out_chan)
self.relu = nn.ReLU(inplace=True)
self.init_weight()
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
class UpSample(nn.Module):
def __init__(self, n_chan, factor=2):
super(UpSample, self).__init__()
out_chan = n_chan * factor * factor
self.proj = nn.Conv2d(n_chan, out_chan, 1, 1, 0)
self.up = nn.PixelShuffle(factor)
self.init_weight()
def forward(self, x):
feat = self.proj(x)
feat = self.up(feat)
return feat
def init_weight(self):
nn.init.xavier_normal_(self.proj.weight, gain=1.)
class BiSeNetOutput(nn.Module):
def __init__(self, in_chan, mid_chan, n_classes, up_factor=32, *args, **kwargs):
super(BiSeNetOutput, self).__init__()
self.up_factor = up_factor
out_chan = n_classes
self.conv = ConvBNReLU(in_chan, mid_chan, ks=3, stride=1, padding=1)
self.conv_out = nn.Conv2d(mid_chan, out_chan, kernel_size=1, bias=True)
self.up = nn.Upsample(scale_factor=up_factor,
mode='bilinear', align_corners=False)
self.init_weight()
def forward(self, x):
x = self.conv(x)
x = self.conv_out(x)
x = self.up(x)
return x
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
def get_params(self):
wd_params, nowd_params = [], []
for name, module in self.named_modules():
if isinstance(module, (nn.Linear, nn.Conv2d)):
wd_params.append(module.weight)
if not module.bias is None:
nowd_params.append(module.bias)
elif isinstance(module, nn.modules.batchnorm._BatchNorm):
nowd_params += list(module.parameters())
return wd_params, nowd_params
class AttentionRefinementModule(nn.Module):
def __init__(self, in_chan, out_chan, *args, **kwargs):
super(AttentionRefinementModule, self).__init__()
self.conv = ConvBNReLU(in_chan, out_chan, ks=3, stride=1, padding=1)
self.conv_atten = nn.Conv2d(out_chan, out_chan, kernel_size= 1, bias=False)
self.bn_atten = BatchNorm2d(out_chan)
# self.sigmoid_atten = nn.Sigmoid()
self.init_weight()
def forward(self, x):
feat = self.conv(x)
atten = torch.mean(feat, dim=(2, 3), keepdim=True)
atten = self.conv_atten(atten)
atten = self.bn_atten(atten)
# atten = self.sigmoid_atten(atten)
atten = atten.sigmoid()
out = torch.mul(feat, atten)
return out
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
class ContextPath(nn.Module):
def __init__(self, *args, **kwargs):
super(ContextPath, self).__init__()
self.resnet = Resnet18()
self.arm16 = AttentionRefinementModule(256, 128)
self.arm32 = AttentionRefinementModule(512, 128)
self.conv_head32 = ConvBNReLU(128, 128, ks=3, stride=1, padding=1)
self.conv_head16 = ConvBNReLU(128, 128, ks=3, stride=1, padding=1)
self.conv_avg = ConvBNReLU(512, 128, ks=1, stride=1, padding=0)
self.up32 = nn.Upsample(scale_factor=2.)
self.up16 = nn.Upsample(scale_factor=2.)
self.init_weight()
def forward(self, x):
feat8, feat16, feat32 = self.resnet(x)
avg = torch.mean(feat32, dim=(2, 3), keepdim=True)
avg = self.conv_avg(avg)
feat32_arm = self.arm32(feat32)
feat32_sum = feat32_arm + avg
feat32_up = self.up32(feat32_sum)
feat32_up = self.conv_head32(feat32_up)
feat16_arm = self.arm16(feat16)
feat16_sum = feat16_arm + feat32_up
feat16_up = self.up16(feat16_sum)
feat16_up = self.conv_head16(feat16_up)
return feat16_up, feat32_up # x8, x16
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
def get_params(self):
wd_params, nowd_params = [], []
for name, module in self.named_modules():
if isinstance(module, (nn.Linear, nn.Conv2d)):
wd_params.append(module.weight)
if not module.bias is None:
nowd_params.append(module.bias)
elif isinstance(module, nn.modules.batchnorm._BatchNorm):
nowd_params += list(module.parameters())
return wd_params, nowd_params
class SpatialPath(nn.Module):
def __init__(self, *args, **kwargs):
super(SpatialPath, self).__init__()
self.conv1 = ConvBNReLU(3, 64, ks=7, stride=2, padding=3)
self.conv2 = ConvBNReLU(64, 64, ks=3, stride=2, padding=1)
self.conv3 = ConvBNReLU(64, 64, ks=3, stride=2, padding=1)
self.conv_out = ConvBNReLU(64, 128, ks=1, stride=1, padding=0)
self.init_weight()
def forward(self, x):
feat = self.conv1(x)
feat = self.conv2(feat)
feat = self.conv3(feat)
feat = self.conv_out(feat)
return feat
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
def get_params(self):
wd_params, nowd_params = [], []
for name, module in self.named_modules():
if isinstance(module, nn.Linear) or isinstance(module, nn.Conv2d):
wd_params.append(module.weight)
if not module.bias is None:
nowd_params.append(module.bias)
elif isinstance(module, nn.modules.batchnorm._BatchNorm):
nowd_params += list(module.parameters())
return wd_params, nowd_params
class FeatureFusionModule(nn.Module):
def __init__(self, in_chan, out_chan, *args, **kwargs):
super(FeatureFusionModule, self).__init__()
self.convblk = ConvBNReLU(in_chan, out_chan, ks=1, stride=1, padding=0)
## use conv-bn instead of 2 layer mlp, so that tensorrt 7.2.3.4 can work for fp16
self.conv = nn.Conv2d(out_chan,
out_chan,
kernel_size = 1,
stride = 1,
padding = 0,
bias = False)
self.bn = nn.BatchNorm2d(out_chan)
# self.conv1 = nn.Conv2d(out_chan,
# out_chan//4,
# kernel_size = 1,
# stride = 1,
# padding = 0,
# bias = False)
# self.conv2 = nn.Conv2d(out_chan//4,
# out_chan,
# kernel_size = 1,
# stride = 1,
# padding = 0,
# bias = False)
# self.relu = nn.ReLU(inplace=True)
self.init_weight()
def forward(self, fsp, fcp):
fcat = torch.cat([fsp, fcp], dim=1)
feat = self.convblk(fcat)
atten = torch.mean(feat, dim=(2, 3), keepdim=True)
atten = self.conv(atten)
atten = self.bn(atten)
# atten = self.conv1(atten)
# atten = self.relu(atten)
# atten = self.conv2(atten)
atten = atten.sigmoid()
feat_atten = torch.mul(feat, atten)
feat_out = feat_atten + feat
return feat_out
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
def get_params(self):
wd_params, nowd_params = [], []
for name, module in self.named_modules():
if isinstance(module, (nn.Linear, nn.Conv2d)):
wd_params.append(module.weight)
if not module.bias is None:
nowd_params.append(module.bias)
elif isinstance(module, nn.modules.batchnorm._BatchNorm):
nowd_params += list(module.parameters())
return wd_params, nowd_params
class BiSeNetV1(nn.Module):
def __init__(self, n_classes, aux_mode='train', *args, **kwargs):
super(BiSeNetV1, self).__init__()
self.cp = ContextPath()
self.sp = SpatialPath()
self.ffm = FeatureFusionModule(256, 256)
self.conv_out = BiSeNetOutput(256, 256, n_classes, up_factor=8)
self.aux_mode = aux_mode
if self.aux_mode == 'train':
self.conv_out16 = BiSeNetOutput(128, 64, n_classes, up_factor=8)
self.conv_out32 = BiSeNetOutput(128, 64, n_classes, up_factor=16)
self.init_weight()
def forward(self, x):
H, W = x.size()[2:]
feat_cp8, feat_cp16 = self.cp(x)
feat_sp = self.sp(x)
feat_fuse = self.ffm(feat_sp, feat_cp8)
feat_out = self.conv_out(feat_fuse)
if self.aux_mode == 'train':
feat_out16 = self.conv_out16(feat_cp8)
feat_out32 = self.conv_out32(feat_cp16)
return feat_out, feat_out16, feat_out32
elif self.aux_mode == 'eval':
return feat_out,
elif self.aux_mode == 'pred':
feat_out = feat_out.argmax(dim=1)
return feat_out
else:
raise NotImplementedError
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
def get_params(self):
wd_params, nowd_params, lr_mul_wd_params, lr_mul_nowd_params = [], [], [], []
for name, child in self.named_children():
child_wd_params, child_nowd_params = child.get_params()
if isinstance(child, (FeatureFusionModule, BiSeNetOutput)):
lr_mul_wd_params += child_wd_params
lr_mul_nowd_params += child_nowd_params
else:
wd_params += child_wd_params
nowd_params += child_nowd_params
return wd_params, nowd_params, lr_mul_wd_params, lr_mul_nowd_params
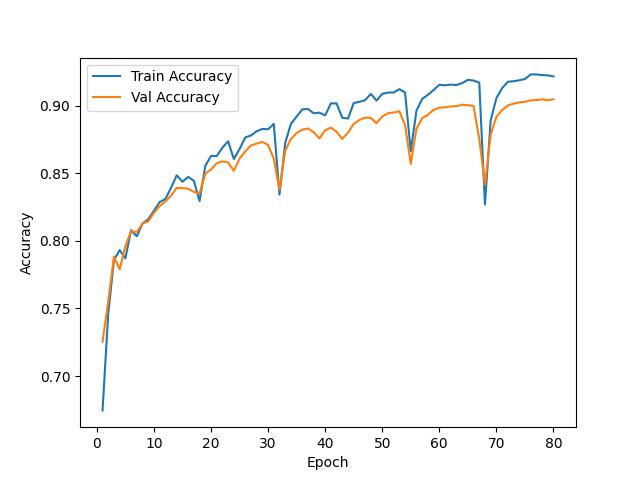
训练过程精度变化
测试精度

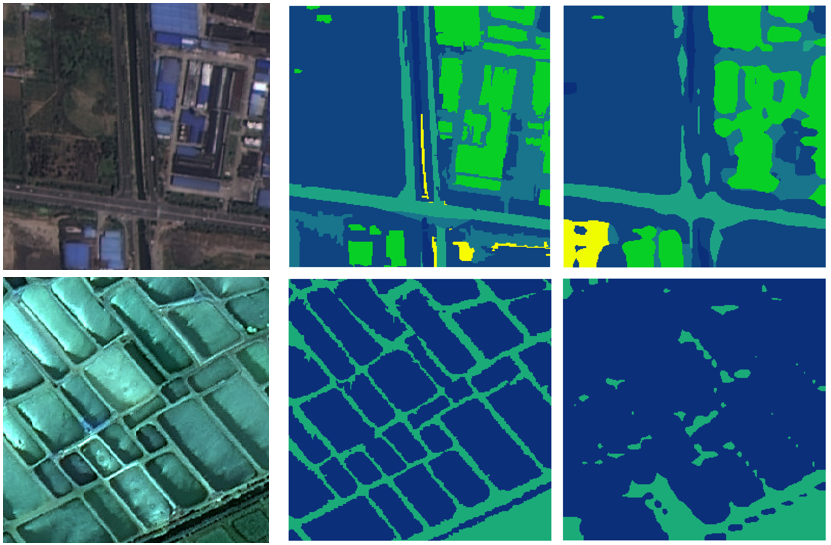
结果展示
总结
今天的分享到此结束,感兴趣的点点关注,后续将分享更多案例。
参考资料
WHDLD: https://sites.google.com/view/zhouwx/dataset#h.p_hQS2jYeaFpV0
[2]BiSeNet: https://arxiv.org/abs/1808.00897
本文由 mdnice 多平台发布
相关文章:
BiseNet实现遥感影像地物分类
遥感地物分类通过对遥感图像中的地物进行准确识别和分类,为资源管理、环境保护、城市规划、灾害监测等领域提供重要信息,有助于实现精细化管理和科学决策,提升社会治理和经济发展水平。深度学习遥感地物分类在提高分类精度、自动化程度、处理…...

【SpringBoot系列】SpringBoot时间字段格式化
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...

.net core 连接数据库,通过数据库生成Modell
1、安装EF Core Power Tools:打开Vs开发工具→扩展→管理扩展 2、(切记执行这步之前确保自己的代码不存在编写或者编译错误!)安装完成后在你需要创建数据库实体的项目文件夹上面单击右键,找到EF Core 工具(必须安装扩展之和才会有…...

开发工具idea中推荐插件
主要是记录一下idea中实用插件,方便开发,换个电脑工作的时候也可以直接在市场中下载使用。 1、Easy Javadoc 自动生成javadoc文档注释,基本上是按照字段名或者方法名翻译的,还是相当好用的。 2、EasyYapi 可以快捷生成接口文档…...

[c++]—string类___深度学习string标准库成员函数与非成员函数
要相信别人能做出来自己一定可以做出来,只不过是时间没到而已 目录 🚩string类对象capacity操作 💻reserve()保留 💻resize() 🚩string类对象元素访问操作 💻operator[]和at() 💻operator…...

PHP 双门双向门禁控制板实时监控源码
本示例使用设备: 实时网络双门双向门禁控制板可二次编程控制网络继电器远程开关-淘宝网 (taobao.com) <?PHPheader("content-type:text/html;charsetGBK");$ThisIpget_local_ip(); //获取电脑IP地址 $server udp://.$ThisIp.:39192; $sock…...
【源码解析】聊聊线程池 实现原理与源码深度解析(二)
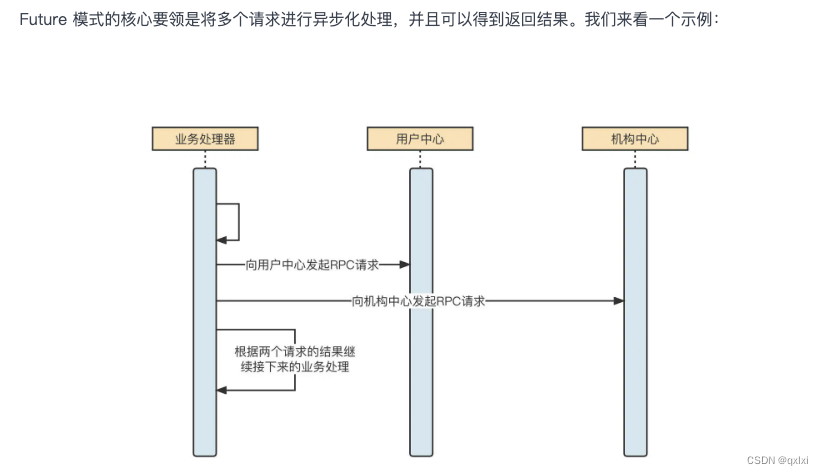
AbstractExecutorService 上一篇文章中,主要介绍了AbstractExecutorService的线程执行的核心流程,execute() 这个方法显然是没有返回执行任务的结果,如果我们需要获取任务执行的结果,怎么办? Callable 就是一个可以获…...
+ MySQL(Docker)环境构筑注意点)
本地Lambda(SAM LI)+ MySQL(Docker)环境构筑注意点
目录构成 mysql8 ├─data ├─logs └─docker├─docker-compose.yml├─.env├─config└─my.cnf .env DB_NAMEtest_db ROOT_DB_PASSroot_password DB_USERtest_user DB_PASStest_password DB_PORT3306 TZAsia/Tokyo docker-compose.yml version: "3.6" ser…...
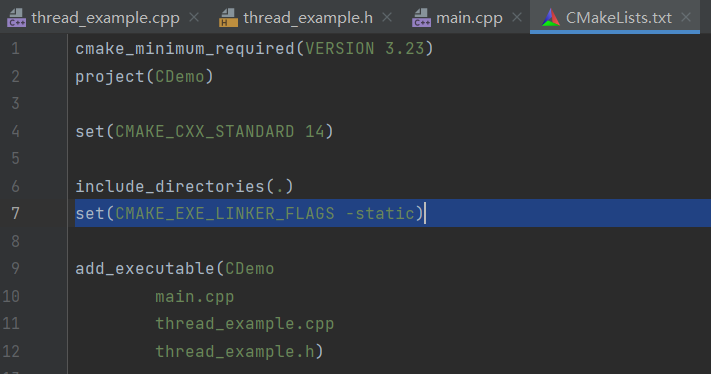
Windows下打包C++程序无法执行:无法定位程序输入点于动态链接库
1、问题描述 环境:CLionCMakeMinGW64遇到问题:打包的exe无法运行,提示无法定位程序输入点于动态链接库。 2、解决思路 通过注释头文件的方式,初步定位问题是因为使用了#include <thread> 多线程库引起的。而且exe文件…...

Android 12 打开网络ADB并禁用USB连接ADB
平台 RK3588 Android 12 Android 调试桥 (adb) Android 调试桥 (adb) 是一种功能多样的命令行工具,可让您与设备进行通信。adb 命令可用于执行各种设备操作,例如安装和调试应用。adb 提供对 Unix shell(可用来在设备上运行各种命令&am…...

基于Langchain的txt文本向量库搭建与检索
这里的源码主要来自于Langchain-ChatGLM中的向量库部分,做了一些代码上的修改和封装,以适用于基于问题和包含数据库表描述的txt文件(文件名为库表名,文件内容为库表中的字段及描述)对数据库表进行快速检索。 中文分词…...

vue2-router
1.基础 1.1.安装 npm install vue-router3.6.5 1.2.引入 import VueRouter from "vue-router" 1.3.注册 Vue.use(VueRouter) 1.4.创建 const router new VueRouter({routes: [{path:/page1, page1},{path:/page2, page2}]} ) 1.5.引用 new Vue({render: h >…...

css新闻链接案例
利用html和css构建出新闻链接案例,使用渐变色做出背景色变化 background: linear-gradient(to bottom, rgb(137, 210, 251), rgb(238, 248, 254), white); 利用背景图片,调整位置完成 dd { height: 28px; line-height: 28px; background-image: url(./图…...
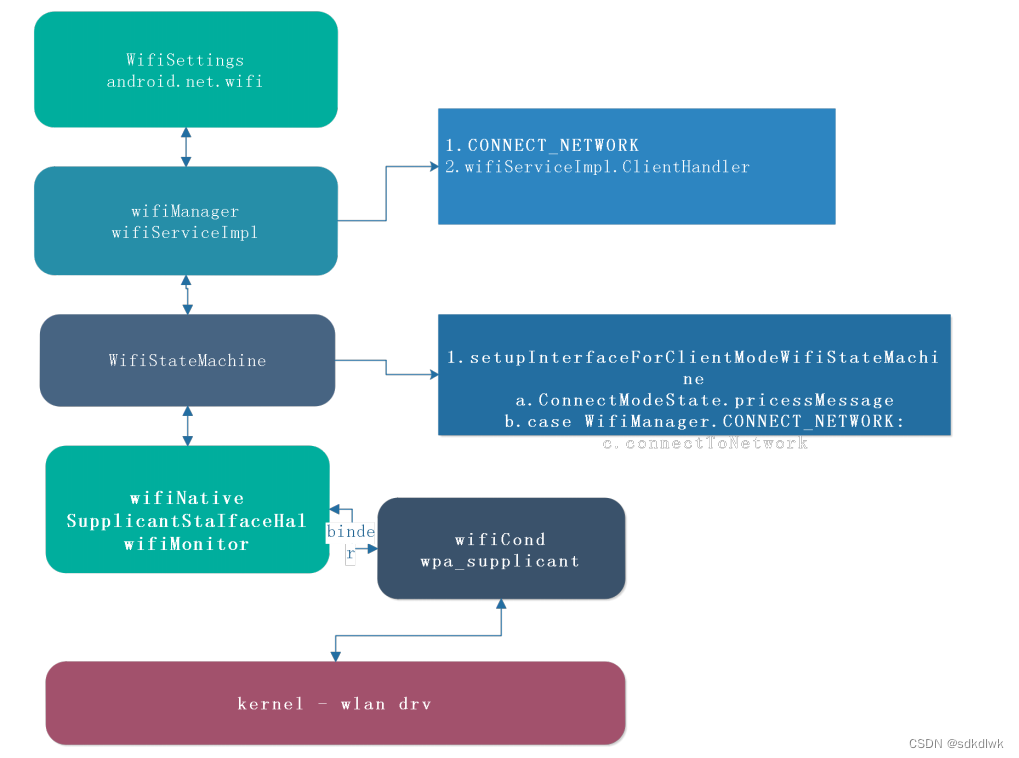
Android wifi连接和获取IP分析
wifi 连接&获取IP 流程图 代码流程分析 一、关联阶段 1. WifiSettings.submit – > WifiManager WifiSettings 干的事情比较简单,当在dialog完成ssid 以及密码填充后,直接call WifiManager save 即可WifiManager 收到Save 之后,就开…...
)
MLIR笔记(5)
4.3.4. 图区域 在MLIR中,区域里类似图的语义由RegionKind::Graph来表示。对没有控制流的并发语义,以及通用有向图数据结构的建模,图区域是合适的。图区域适用于表示耦合值之间的循环关系,这些关系没有基本的序。例如,…...
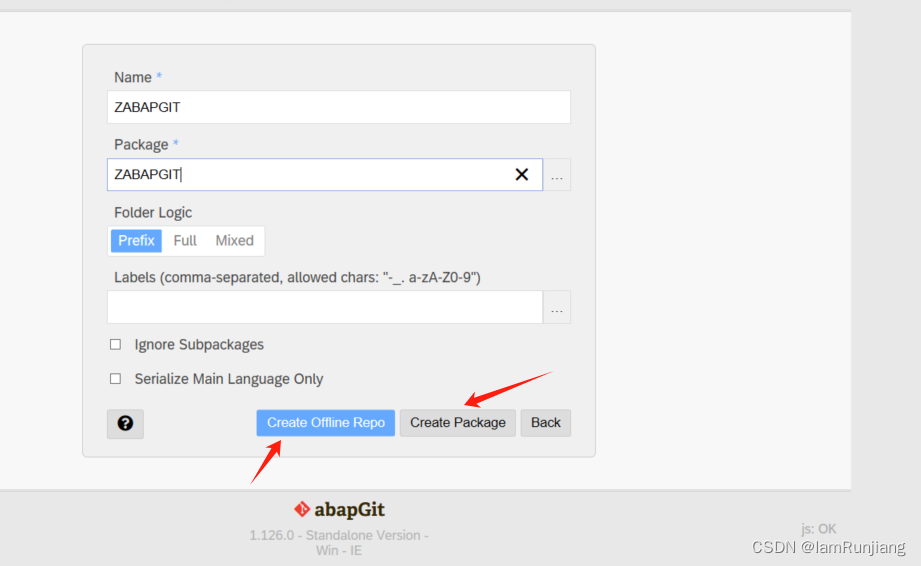
abapgit 安装及使用
abapgit 需求 SA[ BASIS 版本 702 及以上 版本查看路径如下: 安装步骤如下: 1. 下载abapgit 独立版本 程序 链接如下:raw.githubusercontent.com/abapGit/build/main/zabapgit_standalone.prog.abap 2.安装开发版本 2.1 在线安装 前置条…...

园区无线覆盖方案(智慧园区综合解决方案)
李经理正苦恼头疼的工业园区数字化改造项目。近年企业快速增长,园区内Argent工业设备激增,IT部门应接不暇。为确保生产系统稳定运行,IT管理团队经过反复摸索,决定进行全面的数字化升级。然而改造之艰巨远超想象——混杂的接入环境、复杂的专线部署、长达数月的建设周期,种种…...

配置中心--Spring Cloud Config
目录 概述 环境说明 步骤 创建远端git仓库 准备配置文件 配置中心--服务端 配置中心--客户端 配置中心的高可用 配置中心--服务端 配置中心--客户端 消息总线刷新配置 配置中心--服务端 配置中心--客户端 概述 因为微服务架构有很多个服务,手动一个一…...
笔记-模拟角频率和数字角频率的关系理解
先建议阅读前人此文(点击这里),有助于理解。 模拟频率:f 模拟角频率:Ω 数字角频率:ω 其中:在模拟信号中Ω 2πf 正弦波表示:sin(2πft) sin(Ωt) 数字信号就是离散的ÿ…...

Zookeeper+Kafka集群
注:本章使用的Kafka为2.7.0版本 Zookeeper概述 1.Zookeeper定义 Zookeeper是一个开源的分布式的,为分布式框架提供协调服务的Apache项目。 2.Zookeeper工作机制 Zookeeper从设计模式角度来理解:是一个基于观察者模式设计的分布式服务管理…...

B站视频解析破局指南:零基础掌握bilibili-parse视频解析工具
B站视频解析破局指南:零基础掌握bilibili-parse视频解析工具 【免费下载链接】bilibili-parse bilibili Video API 项目地址: https://gitcode.com/gh_mirrors/bi/bilibili-parse 在数字内容爆炸的时代,B站作为优质视频内容平台,拥有海…...
)
保姆级教程:在MTK平台上手把手调试LK启动流程(附常见问题排查)
MTK平台LK启动流程深度调试指南:从环境搭建到实战排查 LK(Little Kernel)作为MTK平台启动流程中的关键环节,承担着硬件初始化、内核加载等核心任务。对于嵌入式开发者而言,掌握LK的调试技巧不仅能快速定位启动失败问题…...

Python实战:从零构建遥感变化检测深度学习数据集与智能裁剪策略
1. 遥感变化检测数据集的核心要素 第一次接触遥感变化检测任务时,我被这个领域的数据特殊性震撼到了。与普通计算机视觉任务不同,这里每一条训练数据都包含两幅时相不同的遥感图像和对应的变化区域标注。想象一下,你手上有某地区2017年和2018…...

Win11Debloat:快速清理Windows系统,让你的电脑重获新生 [特殊字符]
Win11Debloat:快速清理Windows系统,让你的电脑重获新生 🚀 【免费下载链接】Win11Debloat 一个简单的PowerShell脚本,用于从Windows中移除预装的无用软件,禁用遥测,从Windows搜索中移除Bing,以及…...

小白程序员必看!收藏这份本地大模型搭建指南,快速构建高可用知识库问答系统
在AI大模型普及的当下,越来越多开发者、企业开始关注“本地知识库智能问答”的落地——无需依赖云端API,既能保护核心数据隐私,又能实现个性化的知识检索与问答,尤其适配科研、企业内部文档管理、个人学习等场景。但实际搭建过程中…...

Dify Agent源码实战:手把手教你用BaseAgentRunner搭建自己的AI助手
Dify Agent源码实战:从零构建智能助手的核心技术解析 1. 智能助手开发的新范式 在当今AI技术迅猛发展的背景下,构建具备实际应用价值的智能助手已成为开发者关注的热点。Dify作为开源AI应用开发平台,其Agent模块提供了一套完整的智能体开发框…...
)
XLSTM+Informer时间序列预测实战:从风电预测到负荷分析(附完整代码)
XLSTMInformer时间序列预测实战:从风电预测到负荷分析 风电场的功率输出曲线在凌晨3点突然出现异常波动,运维中心的警报声此起彼伏。这不是科幻场景,而是某新能源集团真实遭遇的困境——传统预测模型在极端天气下的失效,直接导致电…...

Arduino嵌入式日志框架:零堆分配与编译期裁剪设计
1. 项目概述ArduinoLog 是一款专为 Arduino 及兼容嵌入式平台设计的轻量级 C 日志框架,其核心目标是在资源受限的微控制器环境中提供高可控性、零动态内存分配、低运行时开销的日志能力。它并非简单封装Serial.print()的工具,而是借鉴 log4j、log4cpp 等…...

BEYOND REALITY Z-Image镜像免配置:Streamlit UI+手动权重注入极简方案
BEYOND REALITY Z-Image镜像免配置:Streamlit UI手动权重注入极简方案 1. 项目概述 BEYOND REALITY Z-Image是一个专为高质量写实人像生成设计的创作引擎,基于Z-Image-Turbo底座和BEYOND REALITY SUPER Z IMAGE 2.0 BF16专属模型构建。这个方案最大的特…...

Qwen3-ForcedAligner-0.6B效果展示:超越WhisperX的时间戳预测精度
Qwen3-ForcedAligner-0.6B效果展示:超越WhisperX的时间戳预测精度 语音处理领域最近迎来了一位新星——Qwen3-ForcedAligner-0.6B,这个专门用于语音文本对齐的模型在时间戳预测精度上表现惊艳。如果你曾经需要为音频内容添加精确的时间标记,…...