UVM中封装成agent
在验证平台中加入monitor时,看到driver和monitor之间的联系:两者之间的代码高度相似。其本质是因为二者 处理的是同一种协议,在同样一套既定的规则下做着不同的事情。由于二者的这种相似性,UVM中通常将二者封装在一起,成为 一个agent。因此,不同的agent就代表了不同的协议。
class my_agent extends uvm_agent ;my_driver drv;my_monitor mon;function new(string name, uvm_component parent);super.new(name, parent);endfunction extern virtual function void build_phase(uvm_phase phase);extern virtual function void connect_phase(uvm_phase phase);`uvm_component_utils(my_agent)
endclass function void my_agent::build_phase(uvm_phase phase);super.build_phase(phase);if (is_active == UVM_ACTIVE) begindrv = my_driver::type_id::create("drv", this);endmon = my_monitor::type_id::create("mon", this);
endfunction function void my_agent::connect_phase(uvm_phase phase);super.connect_phase(phase);
endfunction 所有的agent都要派生自uvm_agent类,且其本身是一个component,应该使用uvm_component_utils宏来实现factory注册。
这里最令人困惑的可能是build_phase中为何根据is_active这个变量的值来决定是否创建driver的实例。is_active是uvm_agent的一 个成员变量,从UVM的源代码中可以找到它的原型如下:
uvm_active_passive_enum is_active = UVM_ACTIVE;而uvm_active_passive_enum是一个枚举类型变量,其定义为:
typedef enum bit { UVM_PASSIVE=0, UVM_ACTIVE=1 } uvm_active_passive_enum; 这个枚举变量仅有两个值:UVM_PASSIVE和UVM_ACTIVE。在uvm_agent中,is_active的值默认为UVM_ACTIVE,在这种模 式下,是需要实例化driver的。那么什么是UVM_PASSIVE模式呢?以本章的DUT为例,如图2-5所示,在输出端口上不需要驱动任 何信号,只需要监测信号。在这种情况下,端口上是只需要monitor的,所以driver可以不用实例化。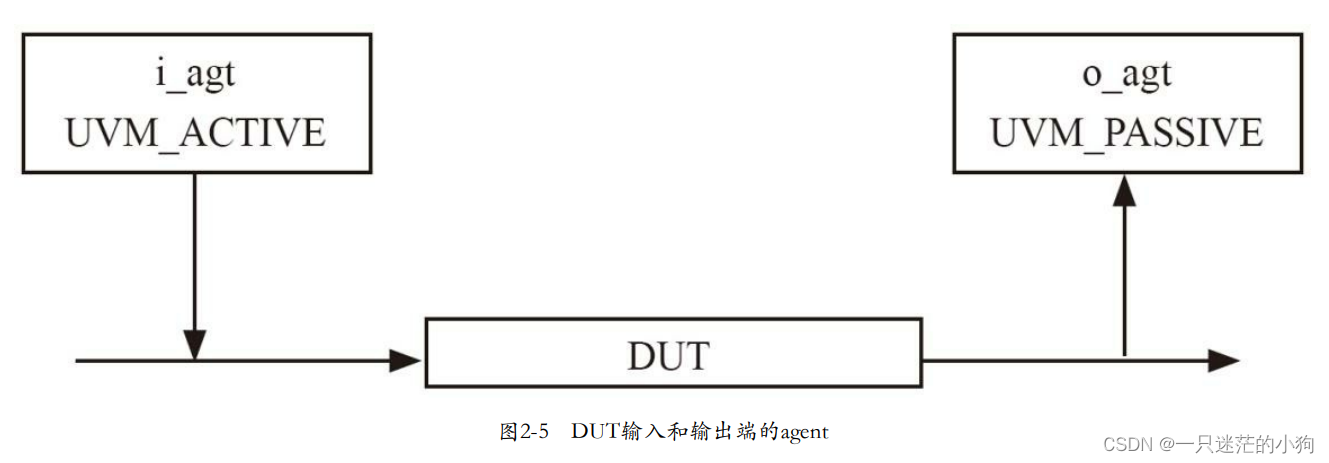
在把driver和monitor封装成agent后,在env中需要实例化agent,而不需要直接实例化driver和monitor了:
class my_env extends uvm_env;my_agent i_agt;my_agent o_agt;function new(string name = "my_env", uvm_component parent);super.new(name, parent);endfunctionvirtual function void build_phase(uvm_phase phase);super.build_phase(phase);i_agt = my_agent::type_id::create("i_agt", this);o_agt = my_agent::type_id::create("o_agt", this);i_agt.is_active = UVM_ACTIVE;o_agt.is_active = UVM_PASSIVE;endfunction`uvm_component_utils(my_env)
endclass 完成i_agt和o_agt的声明后,在my_env的build_phase中对它们进行实例化后,需要指定各自的工作模式是active模式还是passive 模式。现在,整棵UVM树变为了如图2-6所示形式。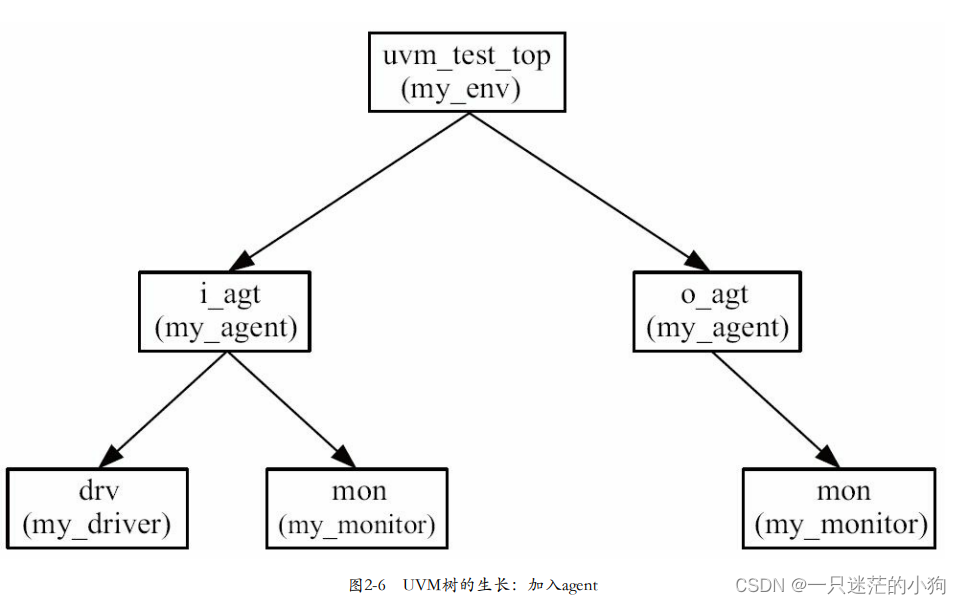
由于agent的加入,driver和monitor的层次结构改变了,在top_tb中使用config_db设置virtual my_if时要注意改变路径:
initial beginuvm_config_db#(virtual my_if)::set(null, "uvm_test_top.i_agt.drv", "vif", input_if);uvm_config_db#(virtual my_if)::set(null, "uvm_test_top.i_agt.mon", "vif", input_if);uvm_config_db#(virtual my_if)::set(null, "uvm_test_top.o_agt.mon", "vif", output_if);
end在加入了my_agent后,UVM的树形结构越来越清晰。首先,只有uvm_component才能作为树的结点,像my_transaction这种使 用uvm_object_utils宏实现的类是不能作为UVM树的结点的。其次,在my_env的build_phase中,创建i_agt和o_agt的实例是在 build_phase中;在agent中,创建driver和monitor的实例也是在build_phase中。按照前文所述的build_phase的从树根到树叶的执行顺 序,可以建立一棵完整的UVM树。UVM要求UVM树最晚在build_phase时段完成,如果在build_phase后的某个phase实例化一个 component:
class my_env extends uvm_env;…virtual function void build_phase(uvm_phase phase);super.build_phase(phase);endfunctionvirtual task main_phase(uvm_phase phase);i_agt = my_agent::type_id::create("i_agt", this);o_agt = my_agent::type_id::create("o_agt", this);i_agt.is_active = UVM_ACTIVE;o_agt.is_active = UVM_PASSIVE;endtask
endclass如上所示,将在my_env的build_phase中的实例化工作移动到main_phase中,UVM会给出如下错误提示:
UVM_FATAL @ 0: i_agt [ILLCRT] It is illegal to create a component ('i_agt' under 'uvm_test_top') after那么是不是只能在build_phase中执行实例化的动作呢?答案是否定的。其实还可以在new函数中执行实例化的动作。如可以在 my_agent的new函数中实例化driver和monitor:
function new(string name, uvm_component parent);super.new(name, parent);if (is_active == UVM_ACTIVE) begindrv = my_driver::type_id::create("drv", this);endmon = my_monitor::type_id::create("mon", this);
endfunction
这样引起的一个问题是无法通过直接赋值的方式向uvm_agent传递is_active的值。在my_env的build_phase(或者new函数)中,向i_agt和o_agt的is_active赋值,根本不会产生效果。因此i_agt和o_agt都工作在active模式(is_active的默认值是UVM_ACTIVE), 这与预想差距甚远。要解决这个问题,可以在my_agent实例化之前使用config_db语句传递is_active的值:
class my_env extends uvm_env;virtual function void build_phase(uvm_phase phase);super.build_phase(phase);uvm_config_db#(uvm_active_passive_enum)::set(this, "i_agt", "is_active", UVM_ACTIVE);uvm_config_db#(uvm_active_passive_enum)::set(this, "o_agt", "is_active", UVM_PASSIVE);i_agt = my_agent::type_id::create("i_agt", this);o_agt = my_agent::type_id::create("o_agt", this);endfunction
endclassclass my_agent extends uvm_agent ;function new(string name, uvm_component parent);super.new(name, parent);uvm_config_db#(uvm_active_passive_enum)::get(this, "", "is_active", is_active);if (is_active == UVM_ACTIVE) begindrv = my_driver::type_id::create("drv", this);endmon = my_monitor::type_id::create("mon", this);endfunction
endclass
只是UVM中约定俗成的还是在build_phase中完成实例化工作。因此,强烈建议仅在build_phase中完成实例化。
相关文章:
UVM中封装成agent
在验证平台中加入monitor时,看到driver和monitor之间的联系:两者之间的代码高度相似。其本质是因为二者 处理的是同一种协议,在同样一套既定的规则下做着不同的事情。由于二者的这种相似性,UVM中通常将二者封装在一起,…...
OSI七层模型与TCP/IP四层模型
一、OSI七层模型简述 OSI 模型的七层是什么?在 OSI 模型中如何进行通信?OSI 模型有哪些替代方案? TCP/IP 模型关于专有协议和模型的说明 二、七层模型详解(DNS、CDN、OSI) 状态码DNS nslookup命令 CDN whois命令 …...
QT 中 QProgressDialog 进度条窗口 备查
基础API //两个构造函数 QProgressDialog::QProgressDialog(QWidget *parent nullptr, Qt::WindowFlags f Qt::WindowFlags());QProgressDialog::QProgressDialog(const QString &labelText, const QString &cancelButtonText, int minimum, int maximum, QWidget *…...
学习ShardingSphere前置知识
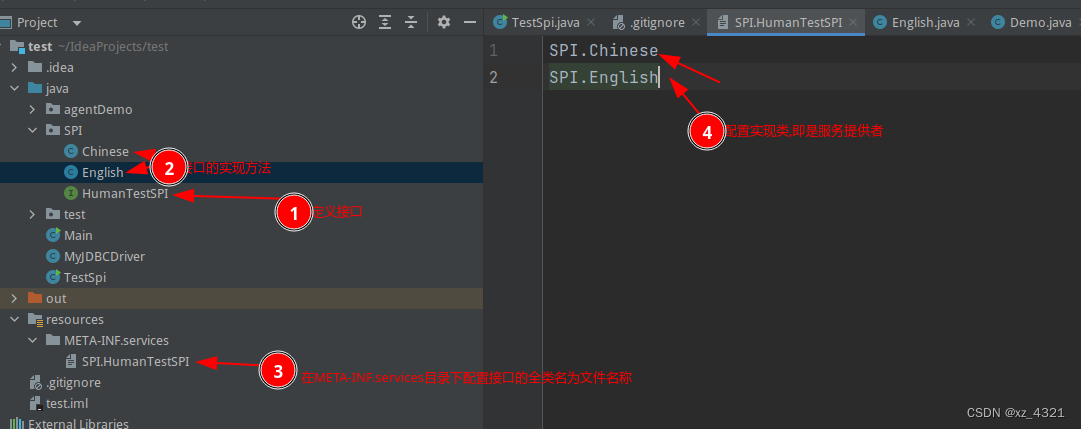
学习ShardingSphere前置准备知识 一. SPI SPI(Service Provider Interface)是一种Java的扩展机制,用于实现组件之间的松耦合。在SPI模型中,服务提供者(Service Provider)定义了一组接口,而服务…...
读书笔记-《数据结构与算法》-摘要3[选择排序]
选择排序 核心:不断地选择剩余元素中的最小者。 找到数组中最小元素并将其和数组第一个元素交换位置。在剩下的元素中找到最小元素并将其与数组第二个元素交换,直至整个数组排序。 性质: 比较次数(N-1)(N-2)(N-3)…21~N^2/2交换次数N运行…...
)
Arduino驱动MLX90614红外测温传感器(温湿度传感器)
目录 1、传感器特性 2、测量方法 3、硬件原理图 4、控制器和传感器连线图...

Ubuntu上传文件到SMB共享文件夹
0. 前言 公司有一些数据共享文件夹,平时可以把开发的重要文件放到上面备份。本人开发使用ubuntu系统,共享文件夹是windows的形式,想通过命令的方式,方便快捷,还可shell脚本自动化。 1. 安装挂载库 sudo apt-get upd…...

【Linux】基础IO--重定向理解Linux下一切皆文件缓冲区
文章目录 一、重定向1.什么是重定向2.dup2 系统调用3.理解输入重定向、输出重定向和追加重定向4.简易shell完整实现 二、理解linux下一切皆文件三、缓冲区1.为什么要有缓冲区2.缓冲区的刷新策略3.缓冲区的位置4.实现一个简易的C语言缓冲区5.内核缓冲区 一、重定向 1.什么是重定…...

RINEX介绍
一、RINEX是什么 Receiver Independent Exchange Format (RINEX) 是一种用于存储、交换和处理全球定位系统 (GPS) 接收机观测数据的标准化文件格式。RINEX 格式由国际电信联盟 (ITU) 和国际GPS服务 (IGS) 组织共同开发和维护。它提供了一种通用的数据格式,使得不同…...

ROS-ROS通信机制-服务通信
文章目录 一、服务通信基本知识二、自定义srv三、C实现四、Python实现 一、服务通信基本知识 服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制。也即: 一个节点A向另一个节点B发送请求,B接收处理请求…...
chown和chmod
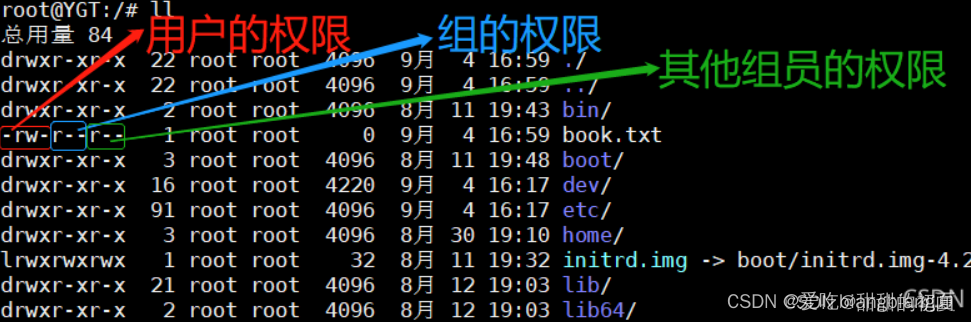
chown和chmod都是在Linux和Unix系统中用于设置文件和文件夹权限的命令,但它们的功能和用途有所不同。 功能:chown主要用于修改文件或文件夹的所有者和所属组,而chmod则主要用于修改文件或文件夹的读写执行权限。用途:如果想要授权…...

【GPU】linux 安装、卸载 nvidia 显卡驱动、cuda 的官方文档、推荐方式(runfile)
文章目录 1. 显卡驱动1.1. 各版本下载地址1.2. 各版本文档地址1.3. 安装、卸载方式 2. CUDA2.1. 各版本下载地址2.2. 各版本文档地址2.3. 安装、卸载方式2.4. 多版本 CUDA 切换方式 1. 显卡驱动 1.1. 各版本下载地址 https://www.nvidia.com/Download/Find.aspx?langzh-cn 1…...
6页手写笔记总结信号与系统常考知识大题知识点
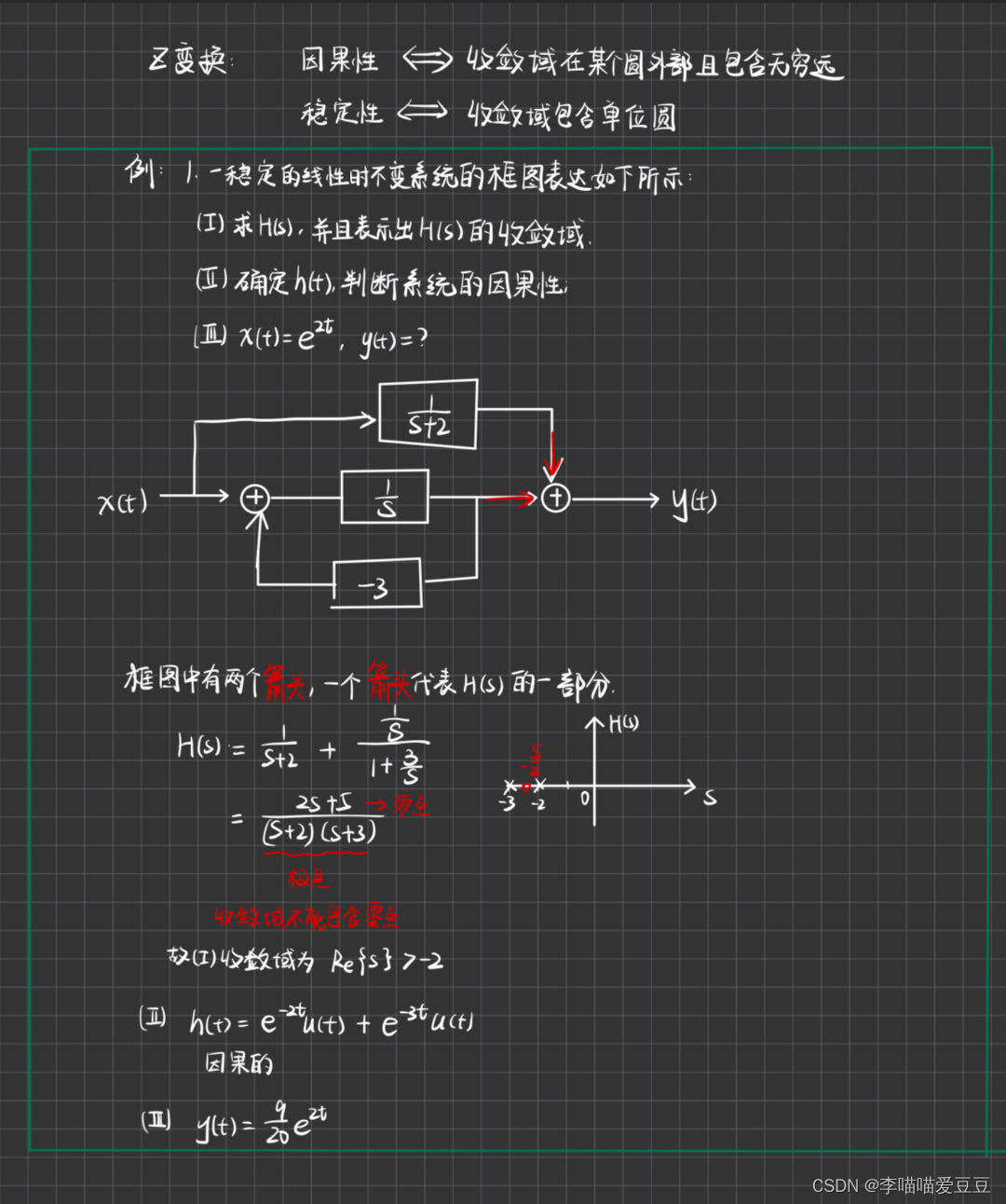
题型一 判断系统特性题型二 求系统卷积题型三 求三大变换正反变换题型四 求全响应题型五 已知微分方程求系统传递函数题型六 已知系统的传递函数求微分方程题型七 画出系统的零极点图,并判断系统的因果性和稳定性 (笔记适合快速复习,可能会有…...

Qt-QSplitter正确设置比例
简短版本: splitter->setSizes({1000, 2000}); // 这个值至少跟像素值设置的一样大,或者更大,例如x10倍详细版本: setSizes 官方介绍如下: Sets the child widgets’ respective sizes to the values given in the…...

一篇吃透大厂面试题,2024找工作一帆风顺。
🏆作者简介,普修罗双战士,一直追求不断学习和成长,在技术的道路上持续探索和实践。 🏆多年互联网行业从业经验,历任核心研发工程师,项目技术负责人。 🎉欢迎 👍点赞✍评论…...

【1day】用友 U8 Cloud系统TaskTreeQuery接口SQL注入漏洞学习
注:该文章来自作者日常学习笔记,请勿利用文章内的相关技术从事非法测试,如因此产生的一切不良后果与作者无关。 目录 一、漏洞描述 二、影响版本 三、资产测绘 四、漏洞复现...

华为快应用中自定义Slider效果
文章目录 一、前言二、实现代码三、参考链接 一、前言 在华为快应用中官方提供了<slider>控件,但是这个控件的限制比较多,比如滑块无法自定义,所以这里进行下自定义,自己修改样式。 二、实现代码 整体效果如下: 源码如下…...
C语言每日一题(43)旋转链表
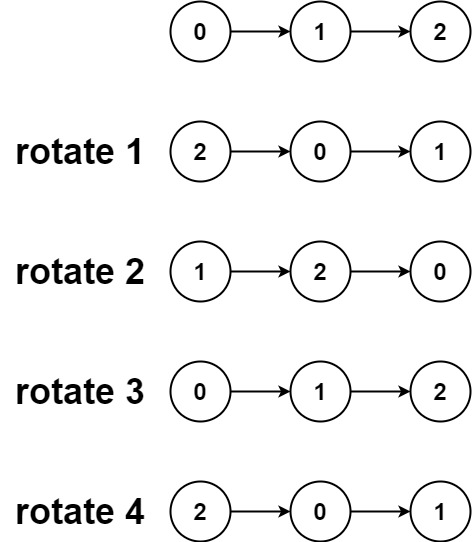
力扣 61 旋转链表 题目描述 给你一个链表的头节点 head ,旋转链表,将链表每个节点向右移动 k 个位置。 示例 1: 输入:head [1,2,3,4,5], k 2 输出:[4,5,1,2,3]示例 2: 输入:head [0,1,2], …...

CCF计算机软件能力认证考试—202209-1如此编码
题目背景 某次测验后,顿顿老师在黑板上留下了一串数字 23333 便飘然而去。凝望着这个神秘数字,小 P 同学不禁陷入了沉思…… 题目描述 已知某次测验包含 � 道单项选择题,其中第 � 题(1≤�≤&…...
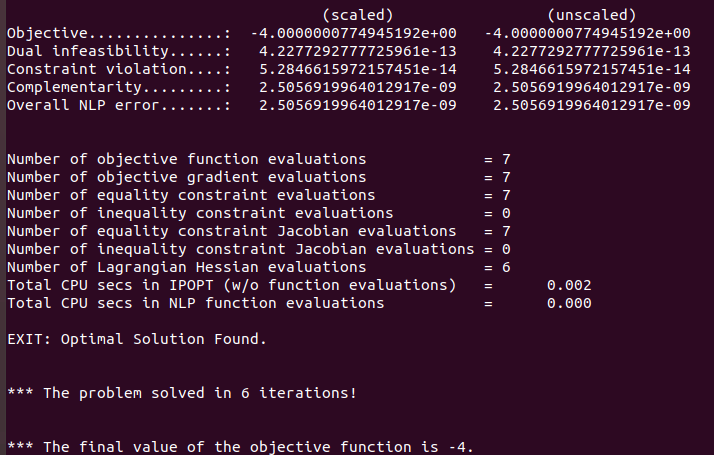
Ubuntu18.04安装Ipopt-3.12.8流程
本文主要介绍在Ubuntu18.04中安装Ipopt库的流程,及过程报错的解决方法,已经有很多关于Ipopt安装的博客,但经过我的测试,很多都失效了,经过探索,找到可流畅的安装Ipopt的方法,总结成本篇博客。 …...

零门槛NAS搭建:WinNAS如何让普通电脑秒变私有云?
一、核心优势:专为Windows用户设计的极简NAS WinNAS由深圳耘想存储科技开发,是一款收费低廉但功能全面的Windows NAS工具,主打“无学习成本部署” 。与其他NAS软件相比,其优势在于: 无需硬件改造:将任意W…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(二)
HoST框架核心实现方法详解 - 论文深度解读(第二部分) 《Learning Humanoid Standing-up Control across Diverse Postures》 系列文章: 论文深度解读 + 算法与代码分析(二) 作者机构: 上海AI Lab, 上海交通大学, 香港大学, 浙江大学, 香港中文大学 论文主题: 人形机器人…...
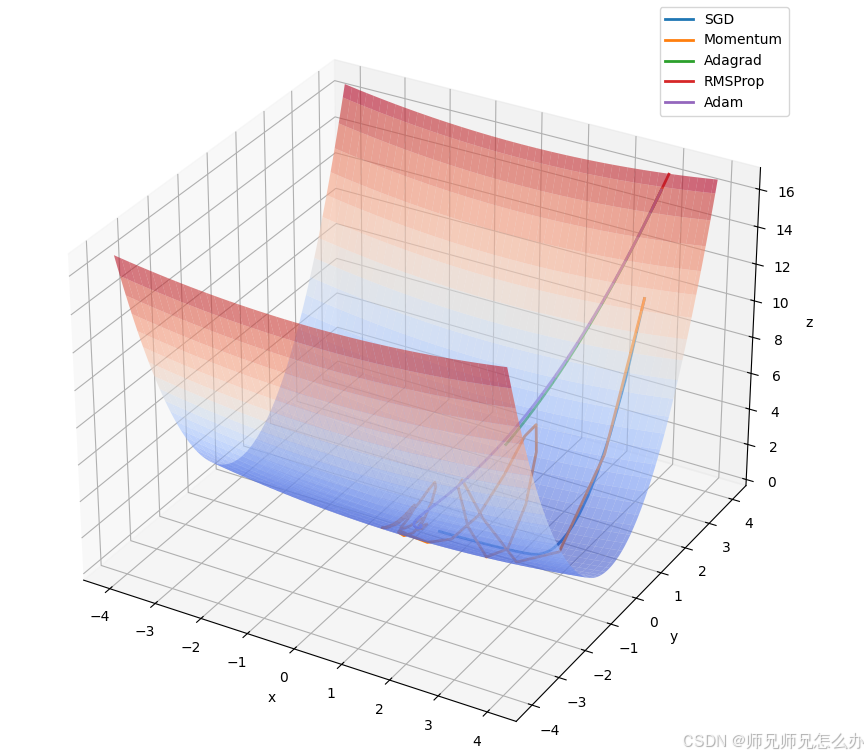
【人工智能】神经网络的优化器optimizer(二):Adagrad自适应学习率优化器
一.自适应梯度算法Adagrad概述 Adagrad(Adaptive Gradient Algorithm)是一种自适应学习率的优化算法,由Duchi等人在2011年提出。其核心思想是针对不同参数自动调整学习率,适合处理稀疏数据和不同参数梯度差异较大的场景。Adagrad通…...
从WWDC看苹果产品发展的规律
WWDC 是苹果公司一年一度面向全球开发者的盛会,其主题演讲展现了苹果在产品设计、技术路线、用户体验和生态系统构建上的核心理念与演进脉络。我们借助 ChatGPT Deep Research 工具,对过去十年 WWDC 主题演讲内容进行了系统化分析,形成了这份…...

k8s从入门到放弃之Ingress七层负载
k8s从入门到放弃之Ingress七层负载 在Kubernetes(简称K8s)中,Ingress是一个API对象,它允许你定义如何从集群外部访问集群内部的服务。Ingress可以提供负载均衡、SSL终结和基于名称的虚拟主机等功能。通过Ingress,你可…...

云启出海,智联未来|阿里云网络「企业出海」系列客户沙龙上海站圆满落地
借阿里云中企出海大会的东风,以**「云启出海,智联未来|打造安全可靠的出海云网络引擎」为主题的阿里云企业出海客户沙龙云网络&安全专场于5.28日下午在上海顺利举办,现场吸引了来自携程、小红书、米哈游、哔哩哔哩、波克城市、…...
Linux相关概念和易错知识点(42)(TCP的连接管理、可靠性、面临复杂网络的处理)
目录 1.TCP的连接管理机制(1)三次握手①握手过程②对握手过程的理解 (2)四次挥手(3)握手和挥手的触发(4)状态切换①挥手过程中状态的切换②握手过程中状态的切换 2.TCP的可靠性&…...
【JVM】- 内存结构
引言 JVM:Java Virtual Machine 定义:Java虚拟机,Java二进制字节码的运行环境好处: 一次编写,到处运行自动内存管理,垃圾回收的功能数组下标越界检查(会抛异常,不会覆盖到其他代码…...

Qt Http Server模块功能及架构
Qt Http Server 是 Qt 6.0 中引入的一个新模块,它提供了一个轻量级的 HTTP 服务器实现,主要用于构建基于 HTTP 的应用程序和服务。 功能介绍: 主要功能 HTTP服务器功能: 支持 HTTP/1.1 协议 简单的请求/响应处理模型 支持 GET…...

uniapp中使用aixos 报错
问题: 在uniapp中使用aixos,运行后报如下错误: AxiosError: There is no suitable adapter to dispatch the request since : - adapter xhr is not supported by the environment - adapter http is not available in the build 解决方案&…...