12.ROS导航模块:gmapping、AMCL、map_server、move_base案例
目录
1 导航概述
2 导航简介
2.1 导航模块简介
1.全局地图
2.自身定位
3.路径规划
4.运动控制
5.环境感知
2.2 导航坐标系odom、map
1.简介
2.特点
3.坐标系变换
2.3 导航条件说明
1.硬件
2.软件
3 导航实现
3.1 创建本篇博客的功能包
3.2 建图--gmapping
3.2.1 gmapping简介
3.2.2 gmapping节点说明
3.2.2.1订阅的Topic
3.2.2.2发布的Topic
3.2.2.3服务
3.2.2.4参数
3.2.2.5所需的坐标变换
3.2.2.6发布的坐标变换
3.2.3 gmapping使用
3.2.3.1编写gmapping节点相关launch文件
3.2.3.2 执行
3.3 地图服务 map_server
3.3.1 map_server使用之地图保存节点(map_saver)
3.3.2 map_server使用之地图发布节点(map_saver)
3.3.3 地图配置文件
3.4 amcl定位
3.4.1 概念
3.4.1.1订阅的Topic
3.4.1.2发布的Topic
3.4.1.3服务
3.4.1.4调用的服务
3.4.1.5参数
3.4.16坐标变换
3.4.2 AMCL的使用
3.4.2.1 编写AMCL相关的文件
3.4.2.2 编写测试文件
3.5 路径规划move_base、代价地图
3.5.1 简介
3.5.2 move_base节点说明
3.5.3 move_base与代价地图
3.5.4 move_base的使用
3.5.4.1 编写launch文件
3.5.4.2 配置文件
3.4.5.3 launch文件集成
3.4.5.4 测试
3.4.5.5 显示全局/本地代价地图与全局/本地路径规划
3.4.5.6 配置文件的解释
3.4.5.7 参数配置小技巧
3.5.5 导航与SLAM建图
3.5.5.1 编写launch文件
4 导航信息
4.1 地图
4.2 里程计数据
4.3 TF
4.4 定位
4.5 路径规划
1 导航概述
导航是机器人系统中最重要的模块之一,比如现在较为流行的服务型室内机器人,就是依赖于机器人导航来实现室内自主移动的,本章主要就是介绍仿真环境下的导航实现,主要内容有:
- 导航相关概念
- 导航实现:机器人建图(SLAM)、地图服务、定位、路径规划....以可视化操作为主。
- 导航消息:了解地图、里程计、雷达、摄像头等相关消息格式。
预期达成的学习目标:
- 了解导航模块中的组成部分以及相关概念
- 能够在仿真环境下独立完成机器人导航
2 导航简介
2.1 导航模块简介
在ROS中机器人导航(Navigation)由多个功能包组合实现,ROS 中又称之为导航功能包集,关于导航模块,官方介绍如下:
一个二维导航堆栈,它接收来自里程计、传感器流和目标姿态的信息,并输出发送到移动底盘的安全速度命令。更通俗的讲: 导航其实就是机器人自主的从 A 点移动到 B 点的过程。
秉着"不重复发明轮子"的原则,ROS 中导航相关的功能包集为机器人导航提供了一套通用的实现,开发者不再需要关注于导航算法、硬件交互... 等偏复杂、偏底层的实现,这些实现都由更专业的研发人员管理、迭代和维护,开发者可以更专注于上层功能,而对于导航功能的调用,只需要根据自身机器人相关参数合理设置各模块的配置文件即可,当然,如果有必要,也可以基于现有的功能包二次开发实现一些定制化需求,这样可以大大提高研发效率,缩短产品落地时间。总而言之,对于一般开发者而言,ROS 的导航功能包集优势如下:
安全: 由专业团队开发和维护
功能: 功能更稳定且全面
高效: 解放开发者,让开发者更专注于上层功能实现
机器人是如何实现导航的呢?或换言之,机器人是如何从 A 点移动到 B 点呢?ROS 官方为了提供了一张导航功能包集的图示,该图中囊括了 ROS 导航的一些关键技术:
假定我们已经以特定方式配置机器人,导航功能包集将使其可以运动。上图概述了这种配置方式。白色的部分是必须且已实现的组件,灰色的部分是可选且已实现的组件,蓝色的部分是必须为每一个机器人平台创建的组件。
总结下来,涉及的关键技术有如下五点:
全局地图
自身定位
路径规划
运动控制
环境感知
机器人导航实现与无人驾驶类似,关键技术也是由上述五点组成,只是无人驾驶是基于室外的,而我们当前介绍的机器人导航更多是基于室内的。
1.全局地图
在现实生活中,当我们需要实现导航时,可能会首先参考一张全局性质的地图,然后根据地图来确定自身的位置、目的地位置,并且也会根据地图显示来规划一条大致的路线.... 对于机器人导航而言,也是如此,在机器人导航中地图是一个重要的组成元素,当然如果要使用地图,首先需要绘制地图。关于地图建模技术不断涌现,这其中有一门称之为 SLAM 的理论脱颖而出:
SLAM(simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。SLAM问题可以描述为: 机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,以绘制出外部环境的完全地图。
在 ROS 中,较为常用的 SLAM 实现也比较多,比如: gmapping、hector_slam、cartographer、rgbdslam、ORB_SLAM ....
当然如果要完成 SLAM ,机器人必须要具备感知外界环境的能力,尤其是要具备获取周围环境深度信息的能力。感知的实现需要依赖于传感器,比如: 激光雷达、摄像头、RGB-D摄像头...
SLAM 可以用于地图生成,而生成的地图还需要被保存以待后续使用,在 ROS 中保存地图的功能包是 map_server
另外注意: SLAM 虽然是机器人导航的重要技术之一,但是 二者并不等价,确切的讲,SLAM 只是实现地图构建和即时定位。
2.自身定位
导航伊始和导航过程中,机器人都需要确定当前自身的位置,如果在室外,那么 GPS 是一个不错的选择,而如果室内、隧道、地下或一些特殊的屏蔽 GPS 信号的区域,由于 GPS 信号弱化甚至完全不可用,那么就必须另辟蹊径了,比如前面的 SLAM 就可以实现自身定位,除此之外,ROS 中还提供了一个用于定位的功能包: amcl
amcl(adaptiveMonteCarloLocalization)自适应的蒙特卡洛定位,是用于2D移动机器人的概率定位系统。它实现了自适应(或KLD采样)蒙特卡洛定位方法,该方法使用粒子过滤器根据已知地图跟踪机器人的姿态。
3.路径规划
导航就是机器人从A点运动至B点的过程,在这一过程中,机器人需要根据目标位置计算全局运动路线,并且在运动过程中,还需要时时根据出现的一些动态障碍物调整运动路线,直至到达目标点,该过程就称之为路径规划。在 ROS 中提供了 move_base 包来实现路径规则,该功能包主要由两大规划器组成:
全局路径规划(gloable_planner)
根据给定的目标点和全局地图实现总体的路径规划,使用 Dijkstra 或 A* 算法进行全局路径规划,计算最优路线,作为全局路线
本地时时规划(local_planner)
在实际导航过程中,机器人可能无法按照给定的全局最优路线运行,比如:机器人在运行中,可能会随时出现一定的障碍物... 本地规划的作用就是使用一定算法(Dynamic Window Approaches) 来实现障碍物的规避,并选取当前最优路径以尽量符合全局最优路径
全局路径规划与本地路径规划是相对的,全局路径规划侧重于全局、宏观实现,而本地路径规划侧重与当前、微观实现。
4.运动控制
导航功能包集假定它可以通过话题"cmd_vel"发布
geometry_msgs/Twist类型的消息,这个消息基于机器人的基座坐标系,它传递的是运动命令。这意味着必须有一个节点订阅"cmd_vel"话题, 将该话题上的速度命令转换为电机命令并发送。5.环境感知
感知周围环境信息,比如: 摄像头、激光雷达、编码器...,摄像头、激光雷达可以用于感知外界环境的深度信息,编码器可以感知电机的转速信息,进而可以获取速度信息并生成里程计信息。
在导航功能包集中,环境感知也是一重要模块实现,它为其他模块提供了支持。其他模块诸如: SLAM、amcl、move_base 都需要依赖于环境感知。

2.2 导航坐标系odom、map
1.简介
定位是导航中的重要实现之一,所谓定位,就是参考某个坐标系(比如:以机器人的出发点为原点创建坐标系)在该坐标系中标注机器人。定位原理看似简单,但是这个这个坐标系不是客观存在的,我们也无法以上帝视角确定机器人的位姿,定位实现需要依赖于机器人自身,机器人需要逆向推导参考系原点并计算坐标系相对关系,该过程实现常用方式有两种:
- 通过里程计定位:时时收集机器人的速度信息计算并发布机器人坐标系与父级参考系的相对关系。
- 通过传感器定位:通过传感器收集外界环境信息通过匹配计算并发布机器人坐标系与父级参考系的相对关系。
两种方式在导航中都会经常使用。
2.特点
两种定位方式都有各自的优缺点。
里程计定位:
- 优点:里程计定位信息是连续的,没有离散的跳跃。
- 缺点:里程计存在累计误差,不利于长距离或长期定位。
传感器定位:
- 优点:比里程计定位更精准;
- 缺点:传感器定位会出现跳变的情况,且传感器定位在标志物较少的环境下,其定位精度会大打折扣。
两种定位方式优缺点互补,应用时一般二者结合使用。
3.坐标系变换
上述两种定位实现中,机器人坐标系一般使用机器人模型中的根坐标系(base_link 或 base_footprint),里程计定位时,父级坐标系一般称之为 odom,如果通过传感器定位,父级参考系一般称之为 map。当二者结合使用时,map 和 odom 都是机器人模型根坐标系的父级,这是不符合坐标变换中"单继承"的原则的,所以,一般会将转换关系设置为: map -> odom -> base_link 或 base_footprint。
2.3 导航条件说明
导航实现,在硬件和软件方面是由一定要求的,需要提前准备。
1.硬件
虽然导航功能包集被设计成尽可能的通用,在使用时仍然有三个主要的硬件限制:
它是为差速驱动的轮式机器人设计的。它假设底盘受到理想的运动命令的控制并可实现预期的结果,命令的格式为:x速度分量,y速度分量,角速度(theta)分量。
它需要在底盘上安装一个单线激光雷达。这个激光雷达用于构建地图和定位。
导航功能包集是为正方形的机器人开发的,所以方形或圆形的机器人将是性能最好的。 它也可以工作在任意形状和大小的机器人上,但是较大的机器人将很难通过狭窄的空间。
2.软件
导航功能实现之前,需要搭建一些软件环境:
毋庸置疑的,必须先要安装 ROS
当前导航基于仿真环境,先保证上一章的机器人系统仿真可以正常执行
在仿真环境下,机器人可以正常接收 /cmd_vel 消息,并发布里程计消息,传感器消息发布也正常,也即导航模块中的运动控制和环境感知实现完毕
后续导航实现中,我们主要关注于: 使用 SLAM 绘制地图、地图服务、自身定位与路径规划。
3 导航实现
本节内容主要介绍导航的完整性实现,旨在掌握机器人导航的基本流程,该章涉及的主要内容如下:
SLAM建图(选用较为常见的gmapping)
地图服务(可以保存和重现地图)
机器人定位
路径规划
上述流程介绍完毕,还会对功能进一步集成实现探索式的SLAM建图。
准备工作
请先安装相关的ROS功能包:
安装 gmapping 包(用于构建地图):
sudo apt install ros-<ROS版本>-gmapping安装地图服务包(用于保存与读取地图):
sudo apt install ros-<ROS版本>-map-server安装 navigation 包(用于定位以及路径规划):
sudo apt install ros-<ROS版本>-navigation新建功能包,并导入依赖: gmapping map_server amcl move_base
3.1 创建本篇博客的功能包
CMakeLists.txt配置:
cmake_minimum_required(VERSION 2.8.3) project(nav_robot)###################### ### Cmake flags ###################### set(CMAKE_BUILD_TYPE "Release") set(CMAKE_CXX_FLAGS "-std=c++11") set(CMAKE_CXX_FLAGS_RELEASE "-O3 -Wall -g -pthread")find_package(catkin REQUIRED COMPONENTSroscpprospyroslib# msgurdfxacrogmappingmap_serveramclmove_base )catkin_package()include_directories(${catkin_INCLUDE_DIRS})package.xml配置:
<?xml version="1.0"?> <package><name>nav_robot</name><version>0.0.0</version><description>A test</description><maintainer email="haha@nefu.com">haha</maintainer><author>HITLHW</author><license>BSD-3</license><buildtool_depend>catkin</buildtool_depend><build_depend>gmapping</build_depend><run_depend>gmapping</run_depend><build_depend>map_server</build_depend><run_depend>map_server</run_depend><build_depend>amcl</build_depend><run_depend>amcl</run_depend><build_depend>move_base</build_depend><run_depend>move_base</run_depend></package>编译一下:
没问题。
3.2 建图--gmapping
3.2.1 gmapping简介
SLAM算法有多种,当前我们选用gmapping,后续会再介绍其他几种常用的SLAM实现。
gmapping 是ROS开源社区中较为常用且比较成熟的SLAM算法之一,gmapping可以根据移动机器人里程计数据和激光雷达数据来绘制二维的栅格地图,对应的,gmapping对硬件也有一定的要求:
- 该移动机器人可以发布里程计消息
- 机器人需要发布雷达消息(该消息可以通过水平固定安装的雷达发布,或者也可以将深度相机消息转换成雷达消息)
关于里程计与雷达数据,仿真环境中可以正常获取的,不再赘述,栅格地图如案例所示。
gmapping 安装前面也有介绍,命令如下:
sudo apt install ros-<ROS版本>-gmapping
3.2.2 gmapping节点说明
gmapping 功能包中的核心节点是:slam_gmapping。为了方便调用,需要先了解该节点订阅的话题、发布的话题、服务以及相关参数。
3.2.2.1订阅的Topic
tf (tf/tfMessage)
- 用于雷达、底盘与里程计之间的坐标变换消息。
scan(sensor_msgs/LaserScan)
- SLAM所需的雷达信息。
3.2.2.2发布的Topic
map_metadata(nav_msgs/MapMetaData)
- 地图元数据,包括地图的宽度、高度、分辨率等,该消息会固定更新。
map(nav_msgs/OccupancyGrid)
- 地图栅格数据,一般会在rviz中以图形化的方式显示。
~entropy(std_msgs/Float64)
- 机器人姿态分布熵估计(值越大,不确定性越大)。
3.2.2.3服务
dynamic_map(nav_msgs/GetMap)
- 用于获取地图数据。
3.2.2.4参数
~base_frame(string, default:"base_link")
- 机器人基坐标系。
~map_frame(string, default:"map")
- 地图坐标系。
~odom_frame(string, default:"odom")
- 里程计坐标系。
~map_update_interval(float, default: 5.0)
- 地图更新频率,根据指定的值设计更新间隔。
~maxUrange(float, default: 80.0)
- 激光探测的最大可用范围(超出此阈值,被截断)。
~maxRange(float)
- 激光探测的最大范围。
.... 参数较多,上述是几个较为常用的参数,其他参数介绍可参考官网。
3.2.2.5所需的坐标变换
雷达坐标系→基坐标系
- 一般由 robot_state_publisher 或 static_transform_publisher 发布。
基坐标系→里程计坐标系
- 一般由里程计节点发布。
3.2.2.6发布的坐标变换
地图坐标系→里程计坐标系
- 地图到里程计坐标系之间的变换。
3.2.3 gmapping使用
3.2.3.1编写gmapping节点相关launch文件
<launch> <param name="use_sim_time" value="true"/><node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"><remap from="scan" to="scan"/><param name="base_frame" value="base_footprint"/><!--底盘坐标系--><param name="odom_frame" value="odom"/> <!--里程计坐标系--><param name="map_update_interval" value="5.0"/><param name="maxUrange" value="16.0"/><param name="sigma" value="0.05"/><param name="kernelSize" value="1"/><param name="lstep" value="0.05"/><param name="astep" value="0.05"/><param name="iterations" value="5"/><param name="lsigma" value="0.075"/><param name="ogain" value="3.0"/><param name="lskip" value="0"/><param name="srr" value="0.1"/><param name="srt" value="0.2"/><param name="str" value="0.1"/><param name="stt" value="0.2"/><param name="linearUpdate" value="1.0"/><param name="angularUpdate" value="0.5"/><param name="temporalUpdate" value="3.0"/><param name="resampleThreshold" value="0.5"/><param name="particles" value="30"/><param name="xmin" value="-50.0"/><param name="ymin" value="-50.0"/><param name="xmax" value="50.0"/><param name="ymax" value="50.0"/><param name="delta" value="0.05"/><param name="llsamplerange" value="0.01"/><param name="llsamplestep" value="0.01"/><param name="lasamplerange" value="0.005"/><param name="lasamplestep" value="0.005"/></node><node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" /><node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" /><node pkg="rviz" type="rviz" name="rviz" /><!-- 可以保存 rviz 配置并后期直接使用--><!--<node pkg="rviz" type="rviz" name="rviz"/>--> </launch>参数:
1.use_sim_time:使用仿真时间,仿真下设置该参数为true。
2.<remap from="scan" to="scan"/> 设置雷达话题:to后面要设置为自己激光雷达的话题
3.map_update_interval 地图更新时间
4.maxUrange 雷达长度阈值
5.必须设置的:
<param name="base_frame" value="base_footprint"/><!--底盘坐标系-->
<param name="odom_frame" value="odom"/> <!--里程计坐标系-->3.2.3.2 执行
1.先启动 Gazebo 仿真环境(此过程略)(上篇博客的)
roslaunch test gazebo_car.launch2.然后再启动地图绘制的 launch 文件:
roslaunch nav_robot gmmaping.launch3.启动键盘键盘控制节点,用于控制机器人运动建图
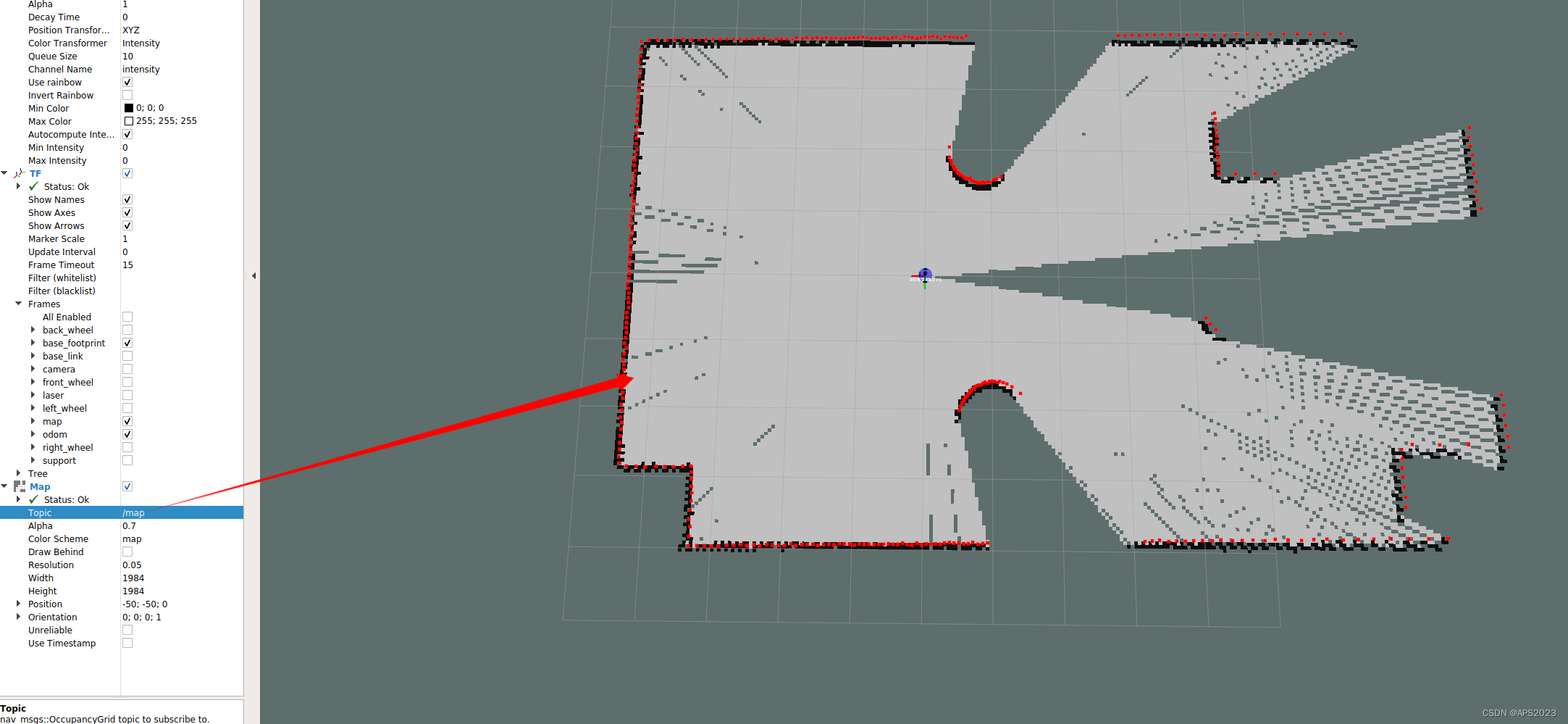
rosrun teleop_twist_keyboard teleop_twist_keyboard.py调节RVIZ显示
这三个是重合的。
我们添加map:
控制机器人运动构建地图。
撞上了,...。


3.3 地图服务 map_server
上一节我们已经实现通过gmapping的构建地图并在rviz中显示了地图,不过,上一节中地图数据是保存在内存中的,当节点关闭时,数据也会被一并释放,我们需要将栅格地图序列化到的磁盘以持久化存储,后期还要通过反序列化读取磁盘的地图数据再执行后续操作。在ROS中,地图数据的序列化与反序列化可以通过 map_server 功能包实现。
map_server功能包中提供了两个节点: map_saver 和 map_server,前者用于将栅格地图保存到磁盘,后者读取磁盘的栅格地图并以服务的方式提供出去。
3.3.1 map_server使用之地图保存节点(map_saver)
订阅的topic:
map(nav_msgs/OccupancyGrid)
- 订阅此话题用于生成地图文件。
地图保存的语法比较简单,编写一个launch文件,内容如下:
<launch><arg name="filename" value="$(find mycar_nav)/map/nav" /><node name="map_save" pkg="map_server" type="map_saver" args="-f $(arg filename)" /> </launch>其中 mymap 是指地图的保存路径以及保存的文件名称。
SLAM建图完毕后,执行该launch文件即可。
测试:
首先,参考上一节,依次启动仿真环境,键盘控制节点与SLAM节点;
然后,通过键盘控制机器人运动并绘图;
最后,通过上述地图保存方式保存地图。
结果:在指定路径下会生成两个文件,xxx.pgm 与 xxx.yaml
第一行是地图保存的地址:我们创立文件夹:
第二行:filename是保存的地图的名称,我们来演示一下。
roslaunch test gazebo_car.launch roslaunch nav_robot gmmaping.launch rosrun teleop_twist_keyboard teleop_twist_keyboard.py
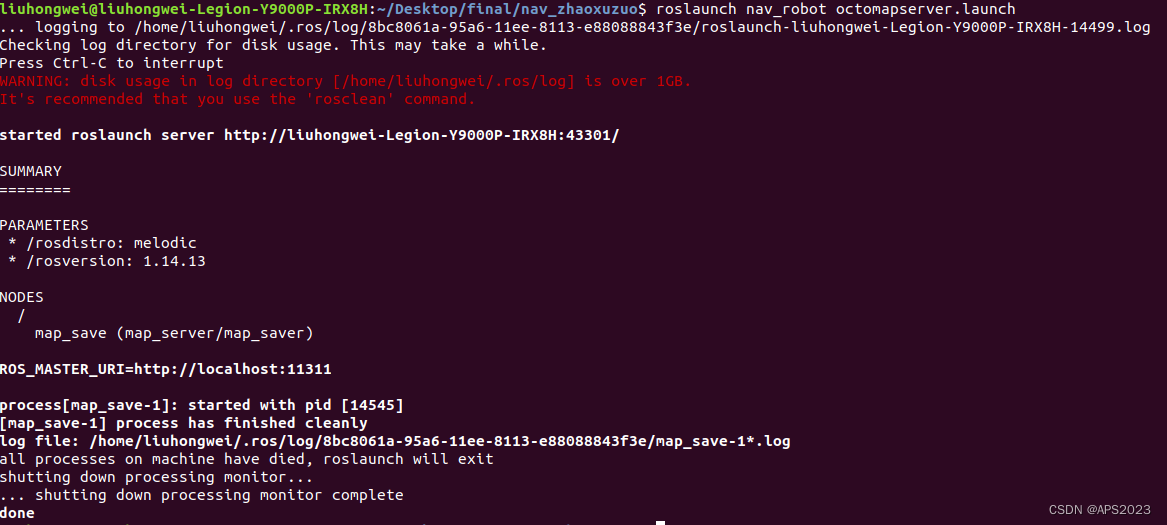
我们建立好地图后,启动我们的地图保存节点:
roslaunch nav_robot octomapserver.launch
发现地图已经被保存下来了:
xxx.pgm 本质是一张图片,直接使用图片查看程序即可打开。
xxx.yaml 保存的是地图的元数据信息,用于描述图片,内容格式如下:
image: /home/liuhongwei/Desktop/final/nav_zhaoxuzuo/src/map/nav.pgm resolution: 0.050000 origin: [-50.000000, -50.000000, 0.000000] negate: 0 occupied_thresh: 0.65 free_thresh: 0.196

3.3.2 map_server使用之地图发布节点(map_saver)
发布的话题
map_metadata(nav_msgs / MapMetaData)
- 发布地图元数据。
map(nav_msgs / OccupancyGrid)
- 地图数据。
服务
static_map(nav_msgs / GetMap)
- 通过此服务获取地图。
参数
〜frame_id(字符串,默认值:“map”)
- 地图坐标系。
<launch><!-- 设置地图的配置文件 --><arg name="map" default="nav.yaml" /><!-- 运行地图服务器,并且加载设置的地图--><node name="map_server" pkg="map_server" type="map_server" args="$(find mycar_nav)/map/$(arg map)"/> </launch>直接执行这个launch文件就行。
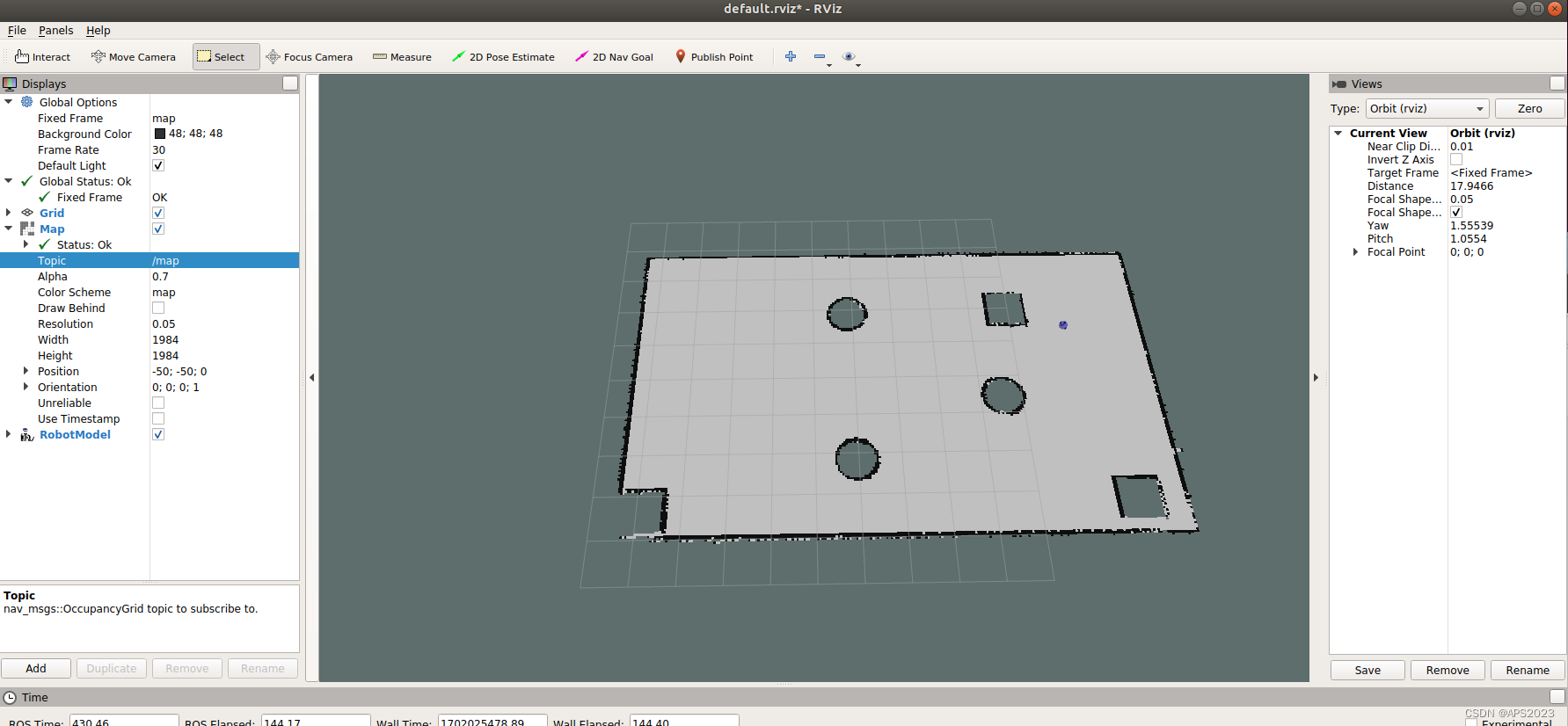
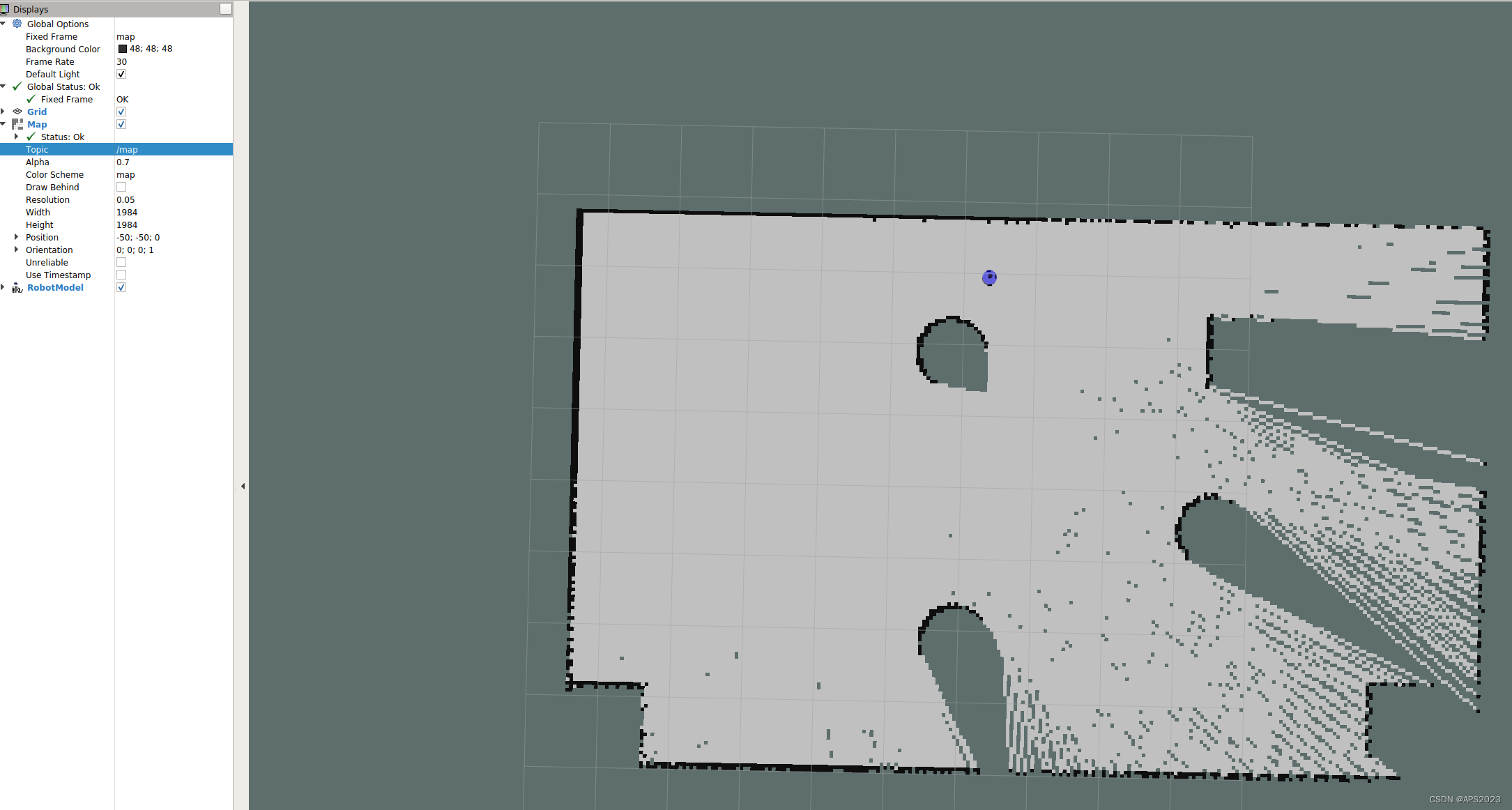
我们在rviz添加map组件:

3.3.3 地图配置文件
1.image:地图资源的路径
2.resolutuin:地图刻度尺单位 m/像素
3.origin:地图的位姿信息(相对于rviz的原点信息)
4.occupied_thresh:占用阈值
5.free_thresh:空闲阈值,判断地图某一点是否被占用
6.negate:取反
为了演示这些参数的作用,我们打开RVIZ:
origin就是右下角相对于axis的偏移。X+50 Y-50。第三个角度为偏航角度。
我们如果把第三个参数改称0.3(弧度)
对于占用阈值,地图中的障碍物判断:
规则:白色可通行 黑色障碍物 蓝黑未知区域,怎么判断呢???地图中每个像素都有取值[0,255] 白色255 黑0 ,像素值设置为x。根据像素值设置一个比例:
p = 255-x / 255 白色0黑色1,如果p>占用阈值为障碍物,p<空闲阈值可以通行。
取反是黑的变白,白变黑。



3.4 amcl定位
3.4.1 概念
所谓定位就是推算机器人自身在全局地图中的位置,当然,SLAM中也包含定位算法实现,不过SLAM的定位是用于构建全局地图的,是属于导航开始之前的阶段,而当前定位是用于导航中,导航中,机器人需要按照设定的路线运动,通过定位可以判断机器人的实际轨迹是否符合预期。在ROS的导航功能包集navigation中提供了 amcl 功能包,用于实现导航中的机器人定位。
AMCL(adaptive Monte Carlo Localization) 是用于2D移动机器人的概率定位系统,它实现了自适应(或KLD采样)蒙特卡洛定位方法,可以根据已有地图使用粒子滤波器推算机器人位置。
amcl 功能包中的核心节点是:amcl。为了方便调用,需要先了解该节点订阅的话题、发布的话题、服务以及相关参数。
3.4.1.1订阅的Topic
scan(sensor_msgs/LaserScan)
- 激光雷达数据。
tf(tf/tfMessage)
- 坐标变换消息。
initialpose(geometry_msgs/PoseWithCovarianceStamped)
- 用来初始化粒子滤波器的均值和协方差。
map(nav_msgs/OccupancyGrid)
- 获取地图数据。
3.4.1.2发布的Topic
amcl_pose(geometry_msgs/PoseWithCovarianceStamped)
- 机器人在地图中的位姿估计。
particlecloud(geometry_msgs/PoseArray)
- 位姿估计集合,rviz中可以被 PoseArray 订阅然后图形化显示机器人的位姿估计集合。
tf(tf/tfMessage)
- 发布从 odom 到 map 的转换。
3.4.1.3服务
global_localization(std_srvs/Empty)
- 初始化全局定位的服务。
request_nomotion_update(std_srvs/Empty)
- 手动执行更新和发布更新的粒子的服务。
set_map(nav_msgs/SetMap)
- 手动设置新地图和姿态的服务。
3.4.1.4调用的服务
static_map(nav_msgs/GetMap)
- 调用此服务获取地图数据。
3.4.1.5参数
~odom_model_type(string, default:"diff")
- 里程计模型选择: "diff","omni","diff-corrected","omni-corrected" (diff 差速、omni 全向轮)
~odom_frame_id(string, default:"odom")
- 里程计坐标系。
~base_frame_id(string, default:"base_link")
- 机器人极坐标系。
~global_frame_id(string, default:"map")
3.4.16坐标变换
里程计本身也是可以协助机器人定位的,不过里程计存在累计误差且一些特殊情况时(车轮打滑)会出现定位错误的情况,amcl 则可以通过估算机器人在地图坐标系下的姿态,再结合里程计提高定位准确度。
- 里程计定位:只是通过里程计数据实现 /odom_frame 与 /base_frame 之间的坐标变换。
- amcl定位: 可以提供 /map_frame 、/odom_frame 与 /base_frame 之间的坐标变换。
3.4.2 AMCL的使用
3.4.2.1 编写AMCL相关的文件
<launch> <node pkg="amcl" type="amcl" name="amcl" output="screen"><!-- Publish scans from best pose at a max of 10 Hz --><param name="odom_model_type" value="diff"/><!-- 里程计模式为差分 --><param name="odom_alpha5" value="0.1"/><param name="transform_tolerance" value="0.2" /><param name="gui_publish_rate" value="10.0"/><param name="laser_max_beams" value="30"/><param name="min_particles" value="500"/><param name="max_particles" value="5000"/><param name="kld_err" value="0.05"/><param name="kld_z" value="0.99"/><param name="odom_alpha1" value="0.2"/><param name="odom_alpha2" value="0.2"/><!-- translation std dev, m --><param name="odom_alpha3" value="0.8"/><param name="odom_alpha4" value="0.2"/><param name="laser_z_hit" value="0.5"/><param name="laser_z_short" value="0.05"/><param name="laser_z_max" value="0.05"/><param name="laser_z_rand" value="0.5"/><param name="laser_sigma_hit" value="0.2"/><param name="laser_lambda_short" value="0.1"/><param name="laser_lambda_short" value="0.1"/><param name="laser_model_type" value="likelihood_field"/><!-- <param name="laser_model_type" value="beam"/> --><param name="laser_likelihood_max_dist" value="2.0"/><param name="update_min_d" value="0.2"/><param name="update_min_a" value="0.5"/><param name="odom_frame_id" value="odom"/><!-- 里程计坐标系 --><param name="base_frame_id" value="base_footprint"/><!-- 添加机器人基坐标系 --><param name="global_frame_id" value="map"/><!-- 添加地图坐标系 --><param name="resample_interval" value="1"/><param name="transform_tolerance" value="0.1"/><param name="recovery_alpha_slow" value="0.0"/><param name="recovery_alpha_fast" value="0.0"/> </node> </launch>odom_model_type:运动类型,差速
<param name="odom_frame_id" value="odom"/><!-- 里程计坐标系 -->
<param name="base_frame_id" value="base_footprint"/><!-- 添加机器人基坐标系 -->
<param name="global_frame_id" value="map"/><!-- 添加地图坐标系 -->
3.4.2.2 编写测试文件
testamcl.launch
amcl节点是不可以单独运行的,运行 amcl 节点之前,需要先加载全局地图,然后启动 rviz 显示定位结果,上述节点可以集成进launch文件,内容示例如下:
<launch><arg name="map" default="nav.yaml" /><node name="map_server" pkg="map_server" type="map_server" args="$(find nav_robot)/map/$(arg map)"/><include file="$(find nav_robot)/launch/amcl.launch" /><node pkg="rviz" type="rviz" name="rviz"/> </launch>先启动gazebo仿真环境:roslaunch test gazebo_car.launch
启动键盘控制节点:rosrun teleop_twist_keyboard tele_twist_keyboard.py
启动集成的amcl的launch文件:roslaunch nav_robot testamcl.launch
启动如下节点:
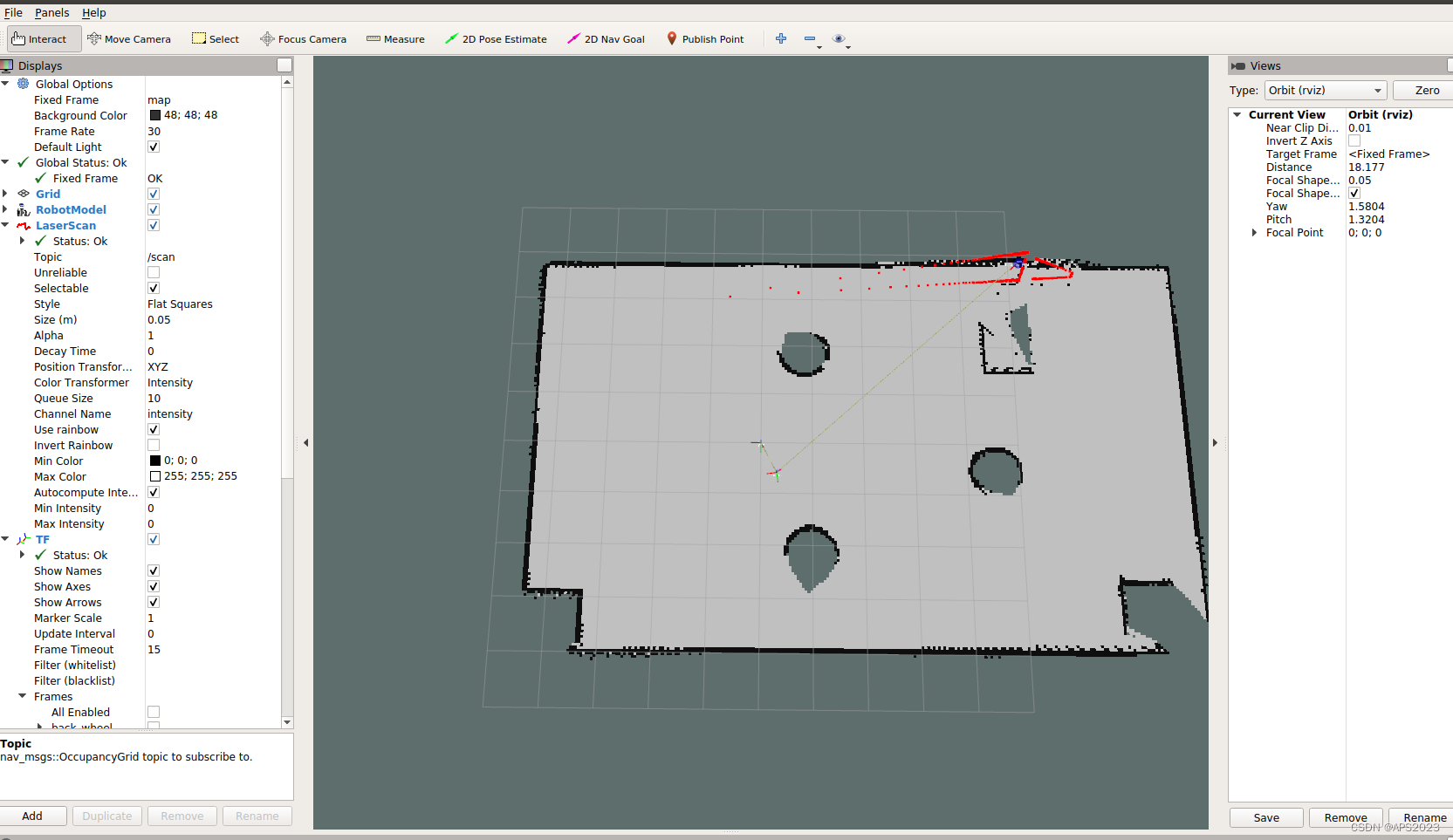
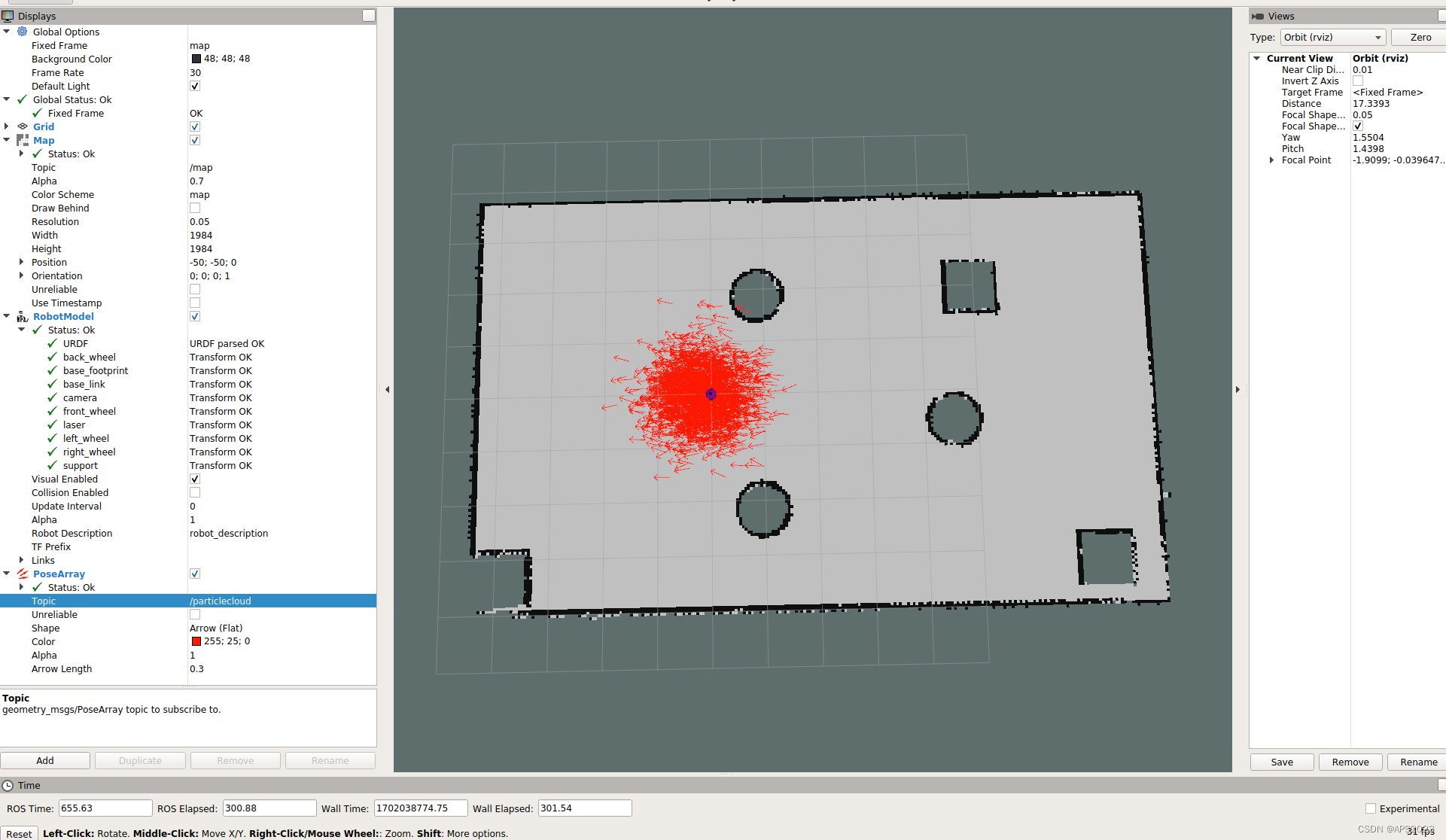
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /> <node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />在启动的 rviz 中,添加RobotModel、Map组件,分别显示机器人模型与地图,添加 posearray 插件,设置topic为particlecloud来显示 amcl 预估的当前机器人的位姿,箭头越是密集,说明当前机器人处于此位置的概率越高;
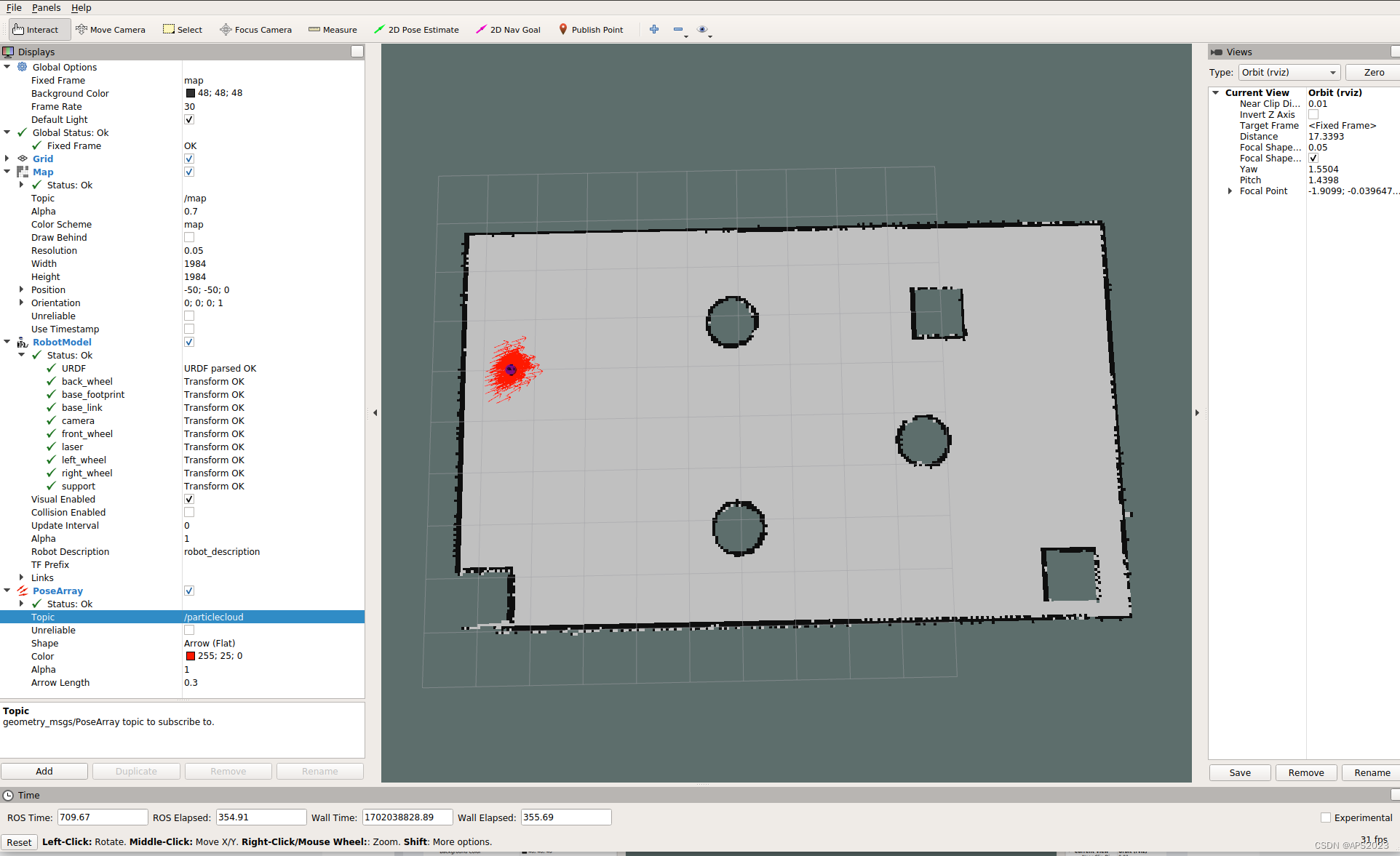
我们控制机器人运动!
箭头越是密集,说明当前机器人处于此位置的概率越高;
3.5 路径规划move_base、代价地图
3.5.1 简介
毋庸置疑的,路径规划是导航中的核心功能之一,在ROS的导航功能包集navigation中提供了 move_base 功能包,用于实现此功能。
move_base 功能包提供了基于动作(action)的路径规划实现,move_base 可以根据给定的目标点,控制机器人底盘运动至目标位置,并且在运动过程中会连续反馈机器人自身的姿态与目标点的状态信息。如前所述move_base主要由全局路径规划与本地路径规划组成。
3.5.2 move_base节点说明
move_base功能包中的核心节点是:move_base。为了方便调用,需要先了解该节点action、订阅的话题、发布的话题、服务以及相关参数。
动作订阅
move_base/goal(move_base_msgs/MoveBaseActionGoal)
- move_base 的运动规划目标。
move_base/cancel(actionlib_msgs/GoalID)
- 取消目标。
动作发布
move_base/feedback(move_base_msgs/MoveBaseActionFeedback)
- 连续反馈的信息,包含机器人底盘坐标。
move_base/status(actionlib_msgs/GoalStatusArray)
- 发送到move_base的目标状态信息。
move_base/result(move_base_msgs/MoveBaseActionResult)
- 操作结果(此处为空)。
订阅的Topic
move_base_simple/goal(geometry_msgs/PoseStamped)
- 运动规划目标(与action相比,没有连续反馈,无法追踪机器人执行状态)。
发布的Topic
cmd_vel(geometry_msgs/Twist)
- 输出到机器人底盘的运动控制消息。
服务
~make_plan(nav_msgs/GetPlan)
- 请求该服务,可以获取给定目标的规划路径,但是并不执行该路径规划。
~clear_unknown_space(std_srvs/Empty)
- 允许用户直接清除机器人周围的未知空间。
~clear_costmaps(std_srvs/Empty)
- 允许清除代价地图中的障碍物,可能会导致机器人与障碍物碰撞,请慎用。
3.5.3 move_base与代价地图
机器人导航(尤其是路径规划模块)是依赖于地图的,地图在SLAM时已经有所介绍了,ROS中的地图其实就是一张图片,这张图片有宽度、高度、分辨率等元数据,在图片中使用灰度值来表示障碍物存在的概率。不过SLAM构建的地图在导航中是不可以直接使用的,因为:
- SLAM构建的地图是静态地图,而导航过程中,障碍物信息是可变的,可能障碍物被移走了,也可能添加了新的障碍物,导航中需要时时的获取障碍物信息;
- 在靠近障碍物边缘时,虽然此处是空闲区域,但是机器人在进入该区域后可能由于其他一些因素,比如:惯性、或者不规则形体的机器人转弯时可能会与障碍物产生碰撞,安全起见,最好在地图的障碍物边缘设置警戒区,尽量禁止机器人进入...
所以,静态地图无法直接应用于导航,其基础之上需要添加一些辅助信息的地图,比如时时获取的障碍物数据,基于静态地图添加的膨胀区等数据。
代价地图有两张:global_costmap(全局代价地图) 和 local_costmap(本地代价地图),前者用于全局路径规划,后者用于本地路径规划。
两张代价地图都可以多层叠加,一般有以下层级:
Static Map Layer:静态地图层,SLAM构建的静态地图。
Obstacle Map Layer:障碍地图层,传感器感知的障碍物信息。
Inflation Layer:膨胀层,在以上两层地图上进行膨胀(向外扩张),以避免机器人的外壳会撞上障碍物。
Other Layers:自定义costmap。
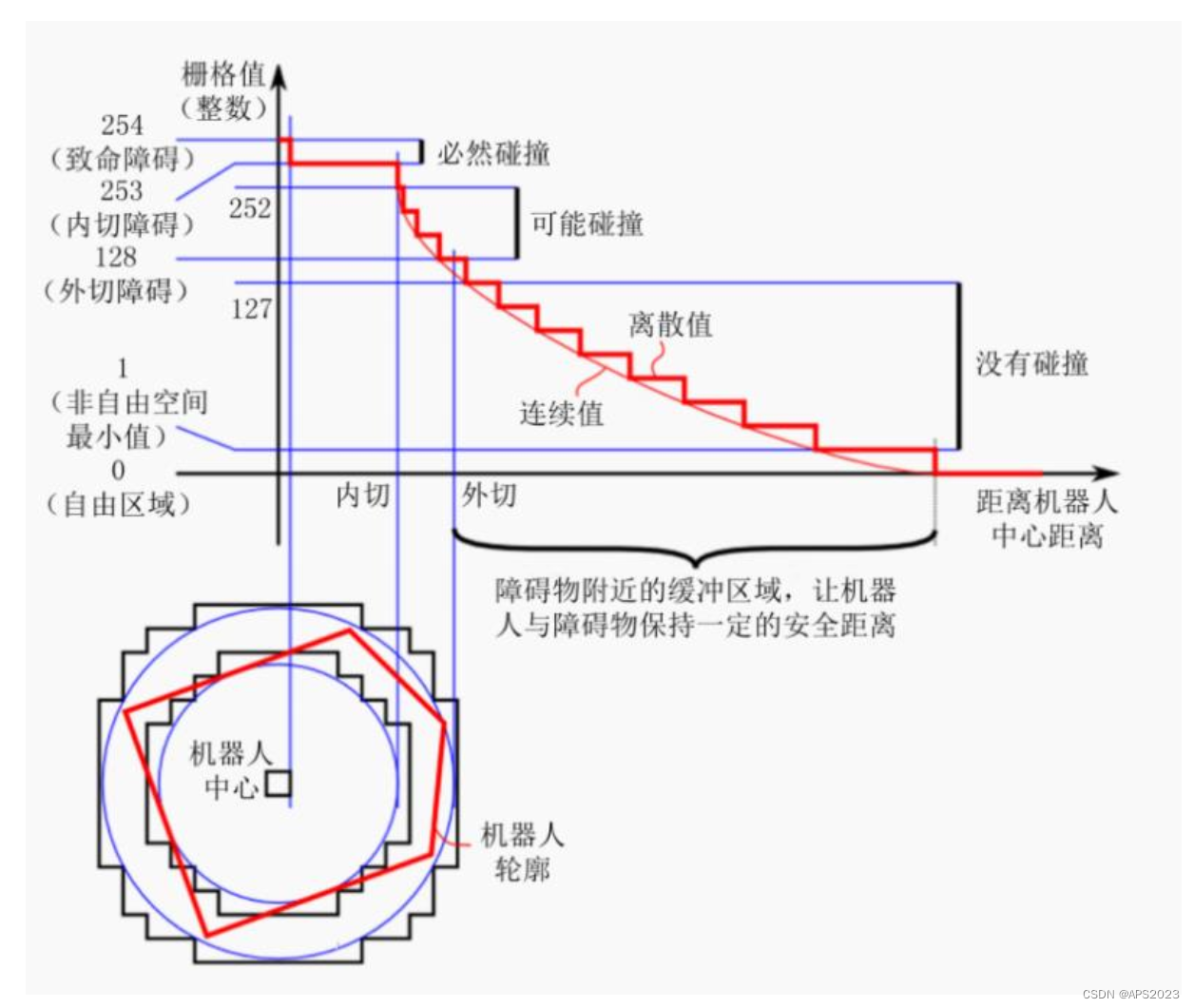
上图中,横轴是距离机器人中心的距离,纵轴是代价地图中栅格的灰度值。
- 致命障碍:栅格值为254,此时障碍物与机器人中心重叠,必然发生碰撞;
- 内切障碍:栅格值为253,此时障碍物处于机器人的内切圆内,必然发生碰撞;
- 外切障碍:栅格值为[128,252],此时障碍物处于其机器人的外切圆内,处于碰撞临界,不一定发生碰撞;
- 非自由空间:栅格值为(0,127],此时机器人处于障碍物附近,属于危险警戒区,进入此区域,将来可能会发生碰撞;
- 自由区域:栅格值为0,此处机器人可以自由通过;
- 未知区域:栅格值为255,还没探明是否有障碍物。
膨胀空间的设置可以参考非自由空间。
3.5.4 move_base的使用
路径规划算法在move_base功能包的move_base节点中已经封装完毕了,但是还不可以直接调用,因为算法虽然已经封装了,但是该功能包面向的是各种类型支持ROS的机器人,不同类型机器人可能大小尺寸不同,传感器不同,速度不同,应用场景不同....最后可能会导致不同的路径规划结果,那么在调用路径规划节点之前,我们还需要配置机器人参数。具体实现如下:
- 先编写launch文件模板
- 编写配置文件
- 集成导航相关的launch文件
- 测试
3.5.4.1 编写launch文件
<launch><node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true"><rosparam file="$(find 功能包)/param/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find 功能包)/param/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find 功能包)/param/local_costmap_params.yaml" command="load" /><rosparam file="$(find 功能包)/param/global_costmap_params.yaml" command="load" /><rosparam file="$(find 功能包)/param/base_local_planner_params.yaml" command="load" /></node></launch>clear_params:这个节点执行之前,参数重置。
respawn:节点关闭后不会重启。
在功能包下新建 param 目录,复制下载的文件到此目录: costmap_common_params_burger.yaml、local_costmap_params.yaml、global_costmap_params.yaml、base_local_planner_params.yaml,并将costmap_common_params_burger.yaml 重命名为:costmap_common_params.yaml。
3.5.4.2 配置文件
#机器人几何参,如果机器人是圆形,设置 robot_radius,如果是其他形状设置 footprint robot_radius: 0.12 #圆形 # footprint: [[-0.12, -0.12], [-0.12, 0.12], [0.12, 0.12], [0.12, -0.12]] #其他形状obstacle_range: 3.0 # 用于障碍物探测,比如: 值为 3.0,意味着检测到距离小于 3 米的障碍物时,就会引入代价地图 raytrace_range: 3.5 # 用于清除障碍物,比如:值为 3.5,意味着清除代价地图中 3.5 米以外的障碍物#膨胀半径,扩展在碰撞区域以外的代价区域,使得机器人规划路径避开障碍物 inflation_radius: 0.2 #代价比例系数,越大则代价值越小 cost_scaling_factor: 3.0#地图类型 map_type: costmap #导航包所需要的传感器 observation_sources: scan #对传感器的坐标系和数据进行配置。这个也会用于代价地图添加和清除障碍物。例如,你可以用激光雷达传感器用于在代价地图添加障碍物,再添加kinect用于导航和清除障碍物。 scan: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}global_costmap:global_frame: map #地图坐标系robot_base_frame: base_footprint #机器人坐标系# 以此实现坐标变换update_frequency: 1.0 #代价地图更新频率publish_frequency: 1.0 #代价地图的发布频率transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间static_map: true # 是否使用一个地图或者地图服务器来初始化全局代价地图,如果不使用静态地图,这个参数为false.local_costmap:global_frame: odom #里程计坐标系robot_base_frame: base_footprint #机器人坐标系update_frequency: 10.0 #代价地图更新频率publish_frequency: 10.0 #代价地图的发布频率transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间static_map: false #不需要静态地图,可以提升导航效果rolling_window: true #是否使用动态窗口,默认为false,在静态的全局地图中,地图不会变化width: 3 # 局部地图宽度 单位是 mheight: 3 # 局部地图高度 单位是 mresolution: 0.05 # 局部地图分辨率 单位是 m,一般与静态地图分辨率保持一致TrajectoryPlannerROS:# Robot Configuration Parametersmax_vel_x: 0.5 # X 方向最大速度min_vel_x: 0.1 # X 方向最小速速max_vel_theta: 1.0 # min_vel_theta: -1.0min_in_place_vel_theta: 1.0acc_lim_x: 1.0 # X 加速限制acc_lim_y: 0.0 # Y 加速限制acc_lim_theta: 0.6 # 角速度加速限制# Goal Tolerance Parameters,目标公差xy_goal_tolerance: 0.10yaw_goal_tolerance: 0.05# Differential-drive robot configuration # 是否是全向移动机器人holonomic_robot: false# Forward Simulation Parameters,前进模拟参数sim_time: 0.8vx_samples: 18vtheta_samples: 20sim_granularity: 0.05
3.4.5.3 launch文件集成
如果要实现导航,需要集成地图服务、amcl 、move_base 与 Rviz 等,集成示例如下:
<launch><arg name="map" default="nav.yaml" /><node name="map_server" pkg="map_server" type="map_server" args="$(find nav_robot)/map/$(arg map)"/><include file="$(find nav_robot)/launch/amcl.launch" /><include file="$(find nav_robot)/launch/move_base.launch" /><node pkg="rviz" type="rviz" name="rviz" /><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /></launch>
3.4.5.4 测试
1.先启动 Gazebo 仿真环境(此过程略);
roslaunch test gazebo_car.launch
2.启动导航相关的 launch 文件;
roslaunch nav_robot nav_test.launch
3.添加Rviz组件(参考演示结果),可以将配置数据保存,后期直接调用;
我们选择一个2D Nav。
等一回。。。
导航到了!



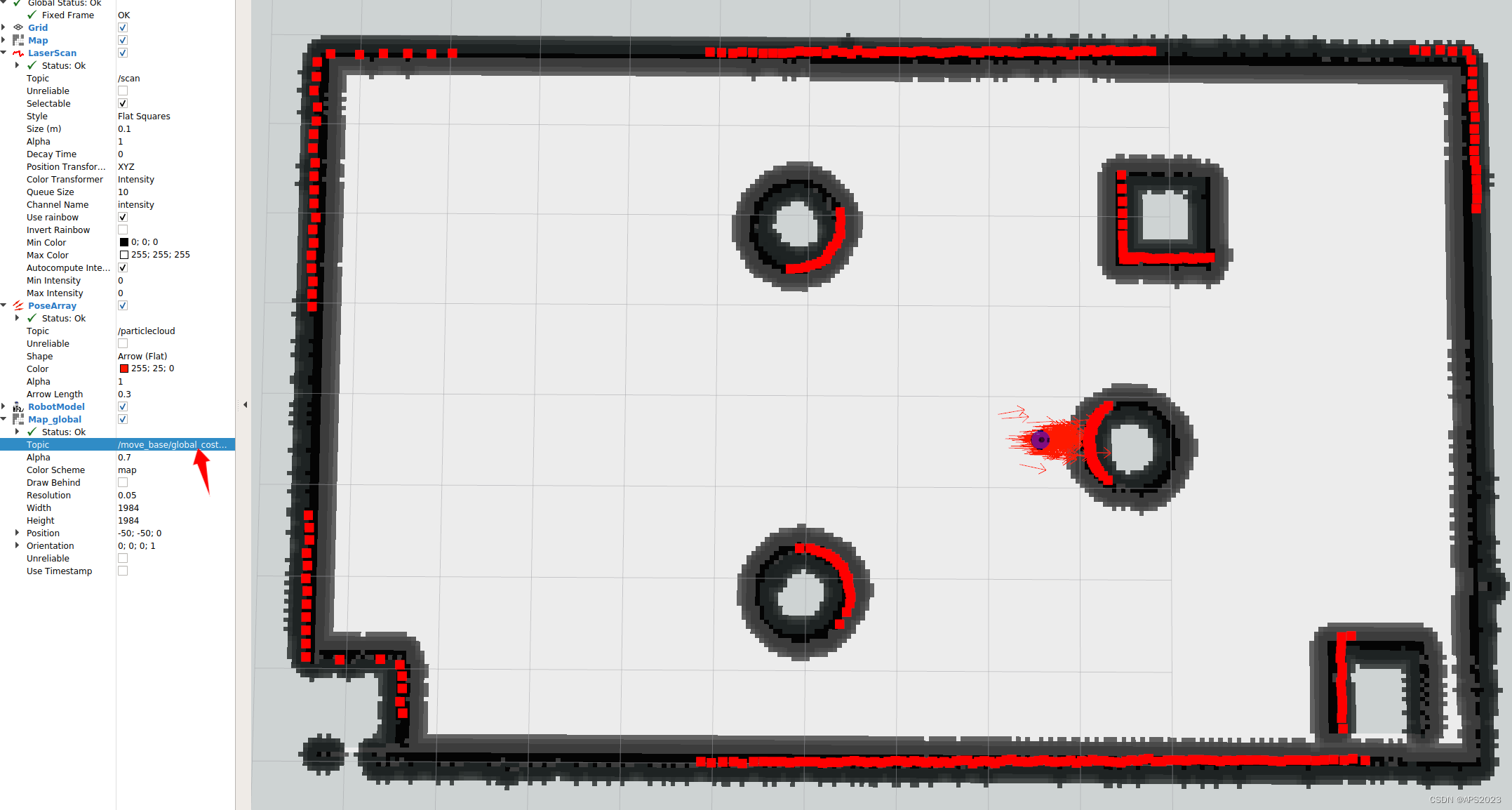
3.4.5.5 显示全局/本地代价地图与全局/本地路径规划
我们先在RVIZ中提供一个全局的代价地图:
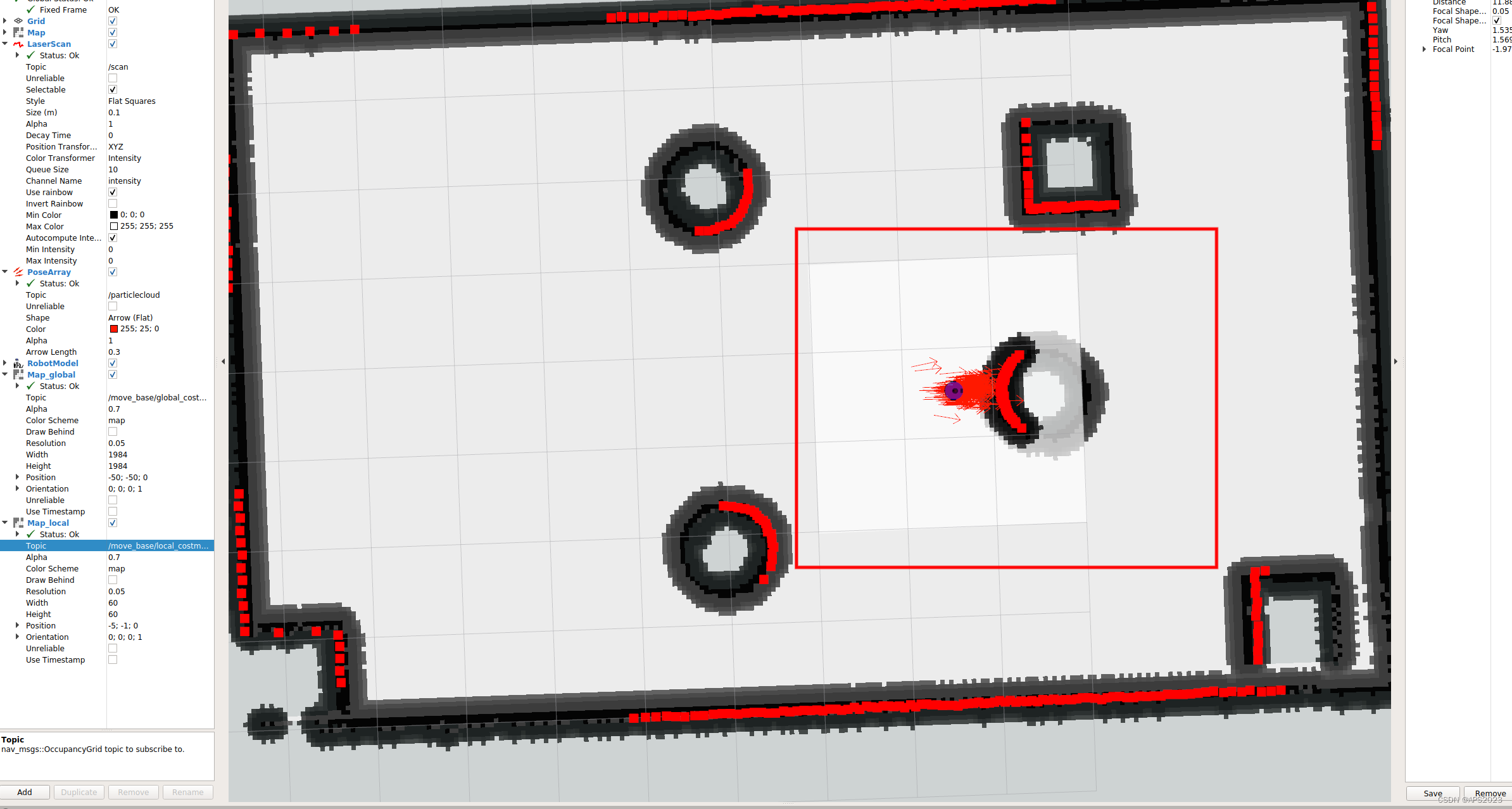
再添加一个本地代价地图:
添加路径的全局路径规划,本地路径规划:

3.4.5.6 配置文件的解释
costmap_common_params.yaml
该文件是move_base 在全局路径规划与本地路径规划时调用的通用参数,包括:机器人的尺寸、距离障碍物的安全距离、传感器信息等。配置参考如下:
#机器人几何参,如果机器人是圆形,设置 robot_radius,如果是其他形状设置 footprint robot_radius: 0.12 #圆形 # footprint: [[-0.12, -0.12], [-0.12, 0.12], [0.12, 0.12], [0.12, -0.12]] #其他形状obstacle_range: 3.0 # 用于障碍物探测,比如: 值为 3.0,意味着检测到距离小于 3 米的障碍物时,就会引入代价地图 raytrace_range: 3.5 # 用于清除障碍物,比如:值为 3.5,意味着清除代价地图中 3.5 米以外的障碍物#膨胀半径,扩展在碰撞区域以外的代价区域,使得机器人规划路径避开障碍物 inflation_radius: 0.2(米) #代价比例系数,越大则代价值越小 cost_scaling_factor: 3.0#地图类型 map_type: costmap #导航包所需要的传感器 observation_sources: scan #对传感器的坐标系和数据进行配置。这个也会用于代价地图添加和清除障碍物。例如,你可以用激光雷达传感器用于在代价地图添加障碍物,再添加kinect用于导航和清除障碍物。 scan: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}我们的机器人是0.1m,但是考虑到还有一些别的突出,,把它的半径设置为0.1m。
obstacle_range、raytrace_range表示当动态物体进入的时候,什么时候加入RVIZ中的代价地图(障碍物距离我3m时会引入代价地图中,障碍物距离我3.5m外清除出代价地图)
将膨胀半径增加,看看会出现什么样的效果:
代价比例系数,越大则代价值越小。
#导航包所需要的传感器
observation_sources: scan
#对传感器的坐标系和数据进行配置。这个也会用于代价地图添加和清除障碍物。例如,你可以用激光雷达传感器用于在代价地图添加障碍物,再添加kinect用于导航和清除障碍物。
scan: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true(是否用激光雷达用作障碍物的标注和清除), clearing: true}
全局代价地图的配置 global_costmap_params.yaml
global_costmap:global_frame: map #地图坐标系robot_base_frame: base_footprint #机器人坐标系# 以此实现坐标变换update_frequency: 1.0 #代价地图更新频率publish_frequency: 1.0 #代价地图的发布频率transform_tolerance: 1.0 #等待坐标变换发布信息的超时时间static_map: true # 是否使用一个地图或者地图服务器来初始化全局代价地图,如果不使用静态地图,这个参数为false.本地代价地图:local_costmap_params.yaml
local_costmap:global_frame: odom #里程计坐标系robot_base_frame: base_footprint #机器人坐标系update_frequency: 10.0 #代价地图更新频率publish_frequency: 10.0 #代价地图的发布频率transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间static_map: false #不需要静态地图,可以提升导航效果rolling_window: true #是否使用动态窗口,默认为false,在静态的全局地图中,地图不会变化width: 3 # 局部地图宽度 单位是 mheight: 3 # 局部地图高度 单位是 mresolution: 0.05 # 局部地图分辨率 单位是 m,一般与静态地图分辨率保持一致机器人运动参数:基本的局部规划器参数配置,这个配置文件设定了机器人的最大和最小速度限制值,也设定了加速度的阈值。
TrajectoryPlannerROS:# Robot Configuration Parametersmax_vel_x: 0.5 # X 方向最大速度min_vel_x: 0.1 # X 方向最小速速max_vel_theta: 1.0 # min_vel_theta: -1.0min_in_place_vel_theta: 1.0acc_lim_x: 1.0 # X 加速限制acc_lim_y: 0.0 # Y 加速限制acc_lim_theta: 0.6 # 角速度加速限制# Goal Tolerance Parameters,目标公差xy_goal_tolerance: 0.10yaw_goal_tolerance: 0.05# Differential-drive robot configuration # 是否是全向移动机器人holonomic_robot: false# Forward Simulation Parameters,前进模拟参数sim_time: 0.8vx_samples: 18vtheta_samples: 20sim_granularity: 0.05Goal Tolerance Parameters,目标公差
xy_goal_tolerance: 0.10
yaw_goal_tolerance: 0.05允许和导航目标有一点距离和角度偏差。
是否是全向移动机器人:麦克轮设置为true。
前进模拟参数:本地路径规划和全局路径规划有点大像喝酒一样!!如果差距比较大就要调试这些参数了,如果想让本地路径规划和全局路径规划贴合的话可以将sim_time设置的长一点。



3.4.5.7 参数配置小技巧
以上配置在实操中,可能会出现机器人在本地路径规划时与全局路径规划不符而进入膨胀区域出现假死的情况,如何尽量避免这种情形呢?
全局路径规划与本地路径规划虽然设置的参数是一样的,但是二者路径规划和避障的职能不同,可以采用不同的参数设置策略:
- 全局代价地图可以将膨胀半径和障碍物系数设置的偏大一些;
- 本地代价地图可以将膨胀半径和障碍物系数设置的偏小一些。
这样,在全局路径规划时,规划的路径会尽量远离障碍物,而本地路径规划时,机器人即便偏离全局路径也会和障碍物之间保留更大的自由空间,从而避免了陷入“假死”的情形。
3.5.5 导航与SLAM建图
SLAM建图中,我们是通过键盘控制机器人移动实现建图的,而后续又介绍了机器人的自主移动实现,那么可不可以将二者结合,实现机器人自主移动的SLAM建图呢?
上述需求是可行的。虽然可能会有疑问,导航时需要地图信息,之前导航实现时,是通过 map_server 包的 map_server 节点来发布地图信息的,如果不先通过SLAM建图,那么如何发布地图信息呢?SLAM建图过程中本身就会时时发布地图信息,所以无需再使用map_server,SLAM已经发布了话题为 /map 的地图消息了,且导航需要定位模块,SLAM本身也是可以实现定位的。
该过程实现比较简单,步骤如下:
- 编写launch文件,集成SLAM与move_base相关节点;
- 执行launch文件并测试。
3.5.5.1 编写launch文件
集成SLAM与move_base相关节点
<launch><!-- 启动SLAM节点 --><include file="$(find nav_robot)/launch/gmmapping.launch" /><!-- 运行move_base节点 --><include file="$(find nav_robot)/launch/move_base.launch" /><!-- 运行rviz --><node pkg="rviz" type="rviz" name="rviz" /> </launch>1.首先运行gazebo仿真环境;
2.然后执行launch文件;
3.在rviz中通过2D Nav Goal设置目标点,机器人开始自主移动并建图了;
4.最后可以使用 map_server 保存地图。
设置目标点:
OK~

4 导航信息
在导航功能包集中包含了诸多节点,毋庸置疑的,不同节点之间的通信使用到了消息中间件(数据载体),在上一节的实现中,这些消息已经在rviz中做了可视化处理,比如:地图、雷达、摄像头、里程计、路径规划...的相关消息在rviz中提供了相关组件,本节主要介绍这些消息的具体格式。
4.1 地图
4.1.1 nav_msgs/MapMetaData
nav_msgs/MapMetaData
- 地图元数据,包括地图的宽度、高度、分辨率等。
nav_msgs/OccupancyGrid
- 地图栅格数据,一般会在rviz中以图形化的方式显示。
调用
rosmsg info nav_msgs/MapMetaData显示消息内容如下:origin改变的话地图相对于RVIZ也会改变time map_load_time float32 resolution #地图分辨率 uint32 width #地图宽度 uint32 height #地图高度 geometry_msgs/Pose origin #地图位姿数据geometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 w
4.1.2 nav_msgs/OccupancyGrid
调用
rosmsg info nav_msgs/OccupancyGrid显示消息内容如下:我们演示一下,让map_server读取地图:
我们输出map信息到一个txt文件:rostopic echo /map >> map.txt
看一下数据:
大部分数据都是-1表示未探索区域,0是空闲,100是占用。
但是全局代价地图有0-100之间的数据,靠近障碍物高,远离低。
std_msgs/Header headeruint32 seqtime stampstring frame_id #--- 地图元数据 nav_msgs/MapMetaData infotime map_load_timefloat32 resolutionuint32 widthuint32 heightgeometry_msgs/Pose origingeometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 w #--- 地图内容数据,数组长度 = width * height int8[] data
4.2 里程计数据
里程计相关消息是:nav_msgs/Odometry,调用
rosmsg info nav_msgs/Odometry显示消息内容如下:std_msgs/Header headeruint32 seqtime stampstring frame_id string child_frame_id geometry_msgs/PoseWithCovariance posegeometry_msgs/Pose pose #里程计位姿geometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 wfloat64[36] covariance geometry_msgs/TwistWithCovariance twistgeometry_msgs/Twist twist #速度geometry_msgs/Vector3 linearfloat64 xfloat64 yfloat64 zgeometry_msgs/Vector3 angularfloat64 xfloat64 yfloat64 z # 协方差矩阵float64[36] covariance
4.3 TF
坐标变换相关消息是: tf/tfMessage,调用
rosmsg info tf/tfMessage显示消息内容如下:geometry_msgs/TransformStamped[] transforms #包含了多个坐标系相对关系数据的数组std_msgs/Header headeruint32 seqtime stampstring frame_idstring child_frame_idgeometry_msgs/Transform transformgeometry_msgs/Vector3 translationfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion rotationfloat64 xfloat64 yfloat64 zfloat64 w
4.4 定位
定位相关消息是:geometry_msgs/PoseArray,调用
rosmsg info geometry_msgs/PoseArray显示消息内容如下:std_msgs/Header headeruint32 seqtime stampstring frame_id geometry_msgs/Pose[] poses #预估的点位姿组成的数组geometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 w
4.5 路径规划
目标点相关消息是:move_base_msgs/MoveBaseActionGoal,调用
rosmsg info move_base_msgs/MoveBaseActionGoal显示消息内容如下:std_msgs/Header headeruint32 seqtime stampstring frame_id actionlib_msgs/GoalID goal_idtime stampstring id move_base_msgs/MoveBaseGoal goalgeometry_msgs/PoseStamped target_posestd_msgs/Header headeruint32 seqtime stampstring frame_idgeometry_msgs/Pose pose #目标点位姿geometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 w路径规划相关消息是:nav_msgs/Path,调用
rosmsg info nav_msgs/Path显示消息内容如下:std_msgs/Header headeruint32 seqtime stampstring frame_id geometry_msgs/PoseStamped[] poses #由一系列点组成的数组std_msgs/Header headeruint32 seqtime stampstring frame_idgeometry_msgs/Pose posegeometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 w
相关文章:

12.ROS导航模块:gmapping、AMCL、map_server、move_base案例
目录 1 导航概述 2 导航简介 2.1 导航模块简介 1.全局地图 2.自身定位 3.路径规划 4.运动控制 5.环境感知 2.2 导航坐标系odom、map 1.简介 2.特点 3.坐标系变换 2.3 导航条件说明 1.硬件 2.软件 3 导航实现 3.1 创建本篇博客的功能包 3.2 建图--gmapping 3.…...
C++中string类的使用
一.string类 1.1为什么学习string类? C 语言中,字符串是以 \0 结尾的一些字符的集合,为了操作方便, C 标准库中提供了一些 str 系列的库函数,但是这些库函数与字符串是分离开的,不太符合OOP 的思想&#x…...

LeeCode每日刷题12.8
搜索插入位置 给定一个排序数组和一个目标值,在数组中找到目标值,并返回其索引。如果目标值不存在于数组中,返回它将会被按顺序插入的位置。 请必须使用时间复杂度为 O(log n) 的算法。 示例 1: 输入: nums [1,3,5,6], target 5 输出: …...

硕士毕业论文格式修改要点_word
目录 0、最开始要做的事情1、更改样式(先善器)2、多级标题(解决自动更新问题必要的基础设置)2、插入图片(1)设置一个图片样式——“无间隔”(2)插入题注(3)修…...

远红外温和护理,一贴缓解痛风不适
在冬天,很多人都会因为痛风等原因引起的关节炎症而感到不适,因为关节疼痛、肢体麻木等问题会对生活质量造成很大的影响。市场上缓解关节酸痛的护理品很多,常见的应该还是关节贴,我现在用的就是何浩明关节痛风贴。 相比于同类产品&…...

优化 SQL 日志记录的方法
为什么 SQL 日志记录是必不可少的 SQL 日志记录在数据库安全和审计中起着至关重要的作用,它涉及跟踪在数据库上执行的所有 SQL 语句,从而实现审计、故障排除和取证分析。SQL 日志记录可以提供有关数据库如何访问和使用的宝贵见解,使其成为确…...

Java设计模式-工厂模式
目录 一、简单工厂模式 (一)需求 (二)使用传统的方法来完成 (三)传统方法的优缺点 (四)基本介绍 (五)使用简单工厂模式 二、工厂方法模式 ࿰…...
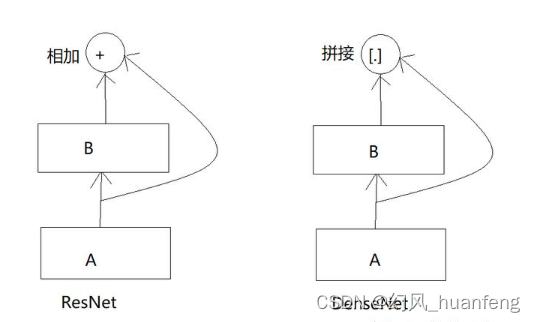
每天五分钟计算机视觉:稠密连接网络(DenseNet)
本文重点 在前面的课程中我们学习了残差网络ResNet,而DenseNet可以看成是ResNet的后续,我们看一下图就可以看出二者的主要区别了。 特点 DenseNet是一种卷积神经网络,它的特点是每一层都直接连接到所有后续层。这意味着,每一层都接收来自前一层的输出,并将其作为输入传递…...
mysql支持的整数类型、各类型整数能够表示的数值范围
MySQL :: MySQL 8.2 Reference Manual :: 11.1.2 Integer Types (Exact Value) - INTEGER, INT, SMALLINT, TINYINT, MEDIUMINT, BIGINT mysql支持的整数有:TINYINT、SMALLINT、MEDIUMINT、INT(INT和INTEGER是同义词)、BIGINT,各…...

我不是DBA之慢SQL诊断方式
最近经常遇到技术开发跑来问我慢SQL优化相关工作,所以干脆出几篇SQL相关优化技术月报,我这里就以公司mysql一致的5.7版本来说明下。 在企业中慢SQL问题进场会遇到,尤其像我们这种ERP行业。 成熟的公司企业都会有晚上的慢SQL监控和预警机制。…...

JavaScript基础知识整理(最全知识点, 精简版,0基础版)
文章目录 一、输入和输出内容 1.1 输出 1.1.1 在浏览器的控制台输出打印 1.1.2 直接在浏览器的页面上输出内容 1.1.3 页面弹出警告对话框 1.2 输入 二、变量 2.1 变量是什么 2.2 变量的声明和赋值 2.3 变量的命名规范和规范 三、变量扩展(数组) 3.1 数组…...

人工智能和网络安全:坏与好
人工智能似乎可以并且已经被用来帮助网络犯罪和网络攻击的各个方面。 人工智能可以用来令人信服地模仿真人的声音。人工智能工具可以帮助诈骗者制作更好、语法正确的网络钓鱼消息(而糟糕的语法往往会暴露出漏洞),并将其翻译成多种语言&…...

基于SSH的java记账管理系统
基于SSH的java记账管理系统 一、系统介绍二、功能展示四、其他系统实现五、获取源码 一、系统介绍 项目类型:Java EE项目 项目名称:基于SSH的记账管理系统 项目架构:B/S架构 开发语言:Java语言 前端技术:HTML、CS…...

github可访问但无法clone问题
github可访问但无法clone问题 重置 http.proxy 重置 http.proxy git config --global http.proxy http://127.0.0.1:1080 git config --global https.proxy https://127.0.0.1:1080 git config --global --unset http.proxy git config --global --unset https.proxy...
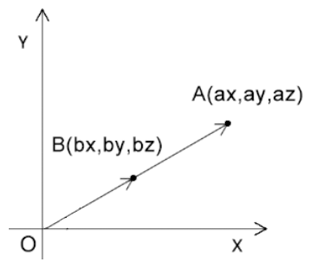
WebGL笔记:图形缩放的原理和实现
缩放 1 )原理 缩放可以理解为对向量长度的改变,或者对向量坐标分量的同步缩放 如下图,比如让向量OA 收缩到点B的位置,也就是从OA变成OB,缩放了一半 2 )公式 已知 点A的位置是(ax,ay,az)点A基于原点內缩了…...
)
前端学习--React(5)
一、useReducer 管理相对复杂的状态数据 定义一个reducer函数,根据action值的不同返回不同的状态 在组件中调用useReducer并传入reducer函数和状态的初始值 事件发生时,通过dispatch函数分派一个对象,即通知reducer具体返回哪个状态对应的操…...

【数据结构】平衡树引入
数据结构-平衡树 前置知识 二叉树二叉树的中序遍历 问题 维护一个数据结构,支持插入元素、删除元素、查询元素的排名、查询排名对应的元素、查询元素的前驱、查询元素的后继等。 BST(二叉搜索树) 作为一个基本无效(很容易卡掉…...
机器视觉相机镜头光源选型
镜头选型工具 - HiTools - 海康威视 Hikvisionhttps://www.hikvision.com/cn/support/tools/hitools/cl8a9de13648c56d7f/ 海康机器人-机器视觉产品页杭州海康机器人股份有限公司海康机器人HIKROBOT是面向全球的机器视觉和移动机器人产品及解决方案提供商,业务聚焦于…...

Appium:iOS测试比Android测试更难?
iOS测试与Android测试: Appium 是一个开源的自动化测试框架,用于iOS、Android和Web应用程序。它允许开发者使用自己的语言来编写测试脚本,并且可以运行在多种平台上。 就Appium本身而言,它为iOS和Android提供了相似的测试能力和…...

使用c#罗列、监视、控制进程
个人简介:本人多年从事研发和测试领域工作,有一定的经验; 口号:懒人推动科技进步,学习编程啊脚本啊目的就是要将人从做相同的工作脱离出来,手懒可以但是脑子不能懒,让重复的事情自动完成,能动一下就完成任务就不能动两下,懒到极致才是目标! 方向:本人不怎么将理论的…...

测试markdown--肇兴
day1: 1、去程:7:04 --11:32高铁 高铁右转上售票大厅2楼,穿过候车厅下一楼,上大巴车 ¥10/人 **2、到达:**12点多到达寨子,买门票,美团/抖音:¥78人 3、中饭&a…...

浅谈不同二分算法的查找情况
二分算法原理比较简单,但是实际的算法模板却有很多,这一切都源于二分查找问题中的复杂情况和二分算法的边界处理,以下是博主对一些二分算法查找的情况分析。 需要说明的是,以下二分算法都是基于有序序列为升序有序的情况…...
LINUX 69 FTP 客服管理系统 man 5 /etc/vsftpd/vsftpd.conf
FTP 客服管理系统 实现kefu123登录,不允许匿名访问,kefu只能访问/data/kefu目录,不能查看其他目录 创建账号密码 useradd kefu echo 123|passwd -stdin kefu [rootcode caozx26420]# echo 123|passwd --stdin kefu 更改用户 kefu 的密码…...
【C++特殊工具与技术】优化内存分配(一):C++中的内存分配
目录 一、C 内存的基本概念 1.1 内存的物理与逻辑结构 1.2 C 程序的内存区域划分 二、栈内存分配 2.1 栈内存的特点 2.2 栈内存分配示例 三、堆内存分配 3.1 new和delete操作符 4.2 内存泄漏与悬空指针问题 4.3 new和delete的重载 四、智能指针…...
【C++进阶篇】智能指针
C内存管理终极指南:智能指针从入门到源码剖析 一. 智能指针1.1 auto_ptr1.2 unique_ptr1.3 shared_ptr1.4 make_shared 二. 原理三. shared_ptr循环引用问题三. 线程安全问题四. 内存泄漏4.1 什么是内存泄漏4.2 危害4.3 避免内存泄漏 五. 最后 一. 智能指针 智能指…...

探索Selenium:自动化测试的神奇钥匙
目录 一、Selenium 是什么1.1 定义与概念1.2 发展历程1.3 功能概述 二、Selenium 工作原理剖析2.1 架构组成2.2 工作流程2.3 通信机制 三、Selenium 的优势3.1 跨浏览器与平台支持3.2 丰富的语言支持3.3 强大的社区支持 四、Selenium 的应用场景4.1 Web 应用自动化测试4.2 数据…...
【LeetCode】算法详解#6 ---除自身以外数组的乘积
1.题目介绍 给定一个整数数组 nums,返回 数组 answer ,其中 answer[i] 等于 nums 中除 nums[i] 之外其余各元素的乘积 。 题目数据 保证 数组 nums之中任意元素的全部前缀元素和后缀的乘积都在 32 位 整数范围内。 请 不要使用除法,且在 O…...
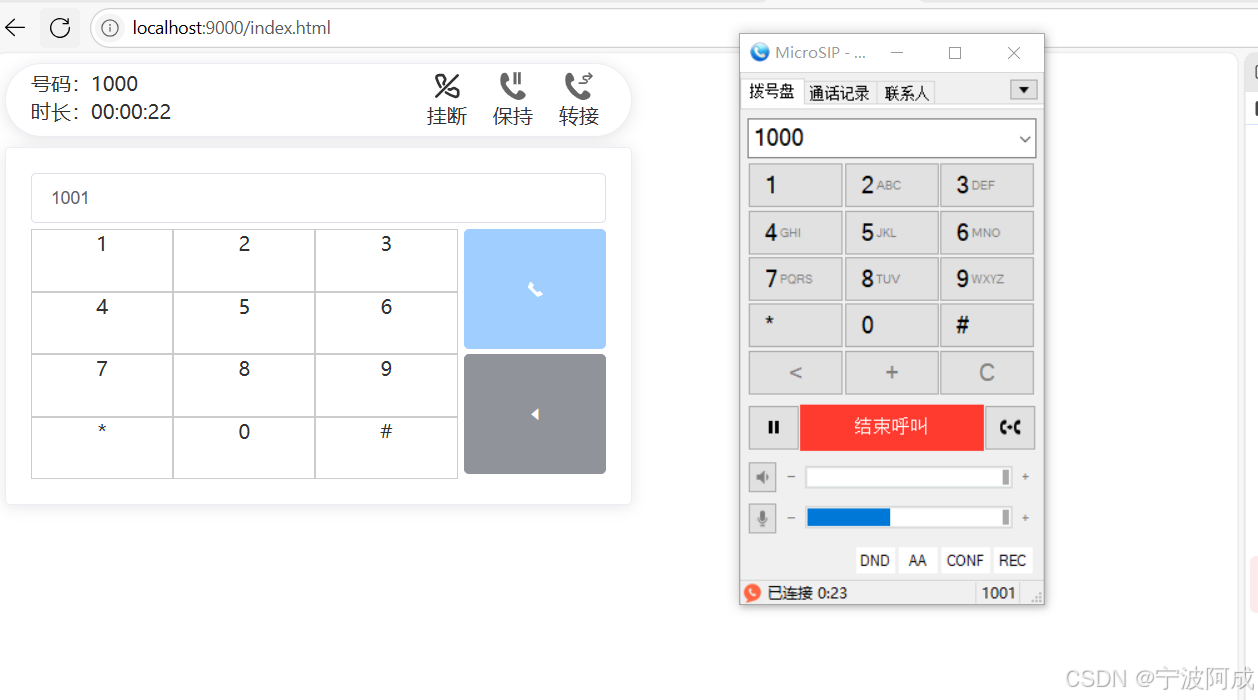
通过MicroSip配置自己的freeswitch服务器进行调试记录
之前用docker安装的freeswitch的,启动是正常的, 但用下面的Microsip连接不上 主要原因有可能一下几个 1、通过下面命令可以看 [rootlocalhost default]# docker exec -it freeswitch fs_cli -x "sofia status profile internal"Name …...

React核心概念:State是什么?如何用useState管理组件自己的数据?
系列回顾: 在上一篇《React入门第一步》中,我们已经成功创建并运行了第一个React项目。我们学会了用Vite初始化项目,并修改了App.jsx组件,让页面显示出我们想要的文字。但是,那个页面是“死”的,它只是静态…...
PydanticAI快速入门示例
参考链接:https://ai.pydantic.dev/#why-use-pydanticai 示例代码 from pydantic_ai import Agent from pydantic_ai.models.openai import OpenAIModel from pydantic_ai.providers.openai import OpenAIProvider# 配置使用阿里云通义千问模型 model OpenAIMode…...