奥比中光 Femto Bolt相机ROS配置
机械臂手眼标定详解
作者: Herman Ye @Auromix
测试环境: Ubuntu20.04/22.04 、ROS1 Noetic/ROS2 Humble、X86 PC/Jetson Orin、Kinect DK/Femto Bolt
更新日期: 2023/12/12
注1: @Auromix 是一个机器人爱好者开源组织。
注2: 由于笔者水平有限,以下内容可能存在事实性错误。
注3: 本文中直接引用各包官方文档的图片等内容,版权归各官方所有。
前言
记录了奥比中光 Femto Bolt相机的配置过程。
包括在边缘平台Jetson Orin以及普通的x86 PC上的ROS1和ROS2版本相机包的配置。
在博文发布的时间点,以下步骤测试有效。
| 参数 | 值 |
|---|---|
| 测试日期 | 2023-12-11 |
| 系统环境1 | Ubuntu20.04 + x86 PC + ROS1 Noetic |
| 系统环境2 | Ubuntu20.04 + Jetson Orin 64G Jetpack5.1.2+ ROS1 Noetic |
| 系统环境3 | Ubuntu22.04 + Jetson Orin 64G Jetpack6.0 + ROS2 Humble |
| 相机型号 | Femto bolt |
| 相机固件 | v1.0.9 |
| 接线 | 原装DC电源+TypeC数据 |
| 驱动包 1 | OrbbecSDK_ROS1 |
| 驱动包 2 | OrbbecSDK_ROS2 |

ROS1 Noetic
测试环境为Ubuntu20.04 + x86 PC + ROS1 Noetic以及Ubuntu20.04 + Jetson Orin 64G Jetpack5.1.2+ ROS1 Noetic
配置
方式一: 自动脚本配置
Auromix提供了Femto Bolt的ROS1自动配置脚本,复制以下命令到终端中使用:
wget -O $HOME/orbbec_femto_bolt_ros1_install.sh https://raw.githubusercontent.com/auromix/ros-install-one-click/main/orbbec_femto_bolt_ros1_install.sh && sudo chmod +x $HOME/orbbec_femto_bolt_ros1_install.sh && bash $HOME/orbbec_femto_bolt_ros1_install.sh && rm $HOME/orbbec_femto_bolt_ros1_install.sh
如果希望了解自动配置脚本的内容,可查看github上的ros-install-one-click项目。
方式二:手动配置
- 下载
# Create ROS workspace
mkdir -p ~/orbbec_test_ws/src && cd ~/orbbec_test_ws/src
# Download Camera ROS SDK
git clone https://github.com/orbbec/OrbbecSDK_ROS1.git
- 安装依赖
# Install dependencies
cd ~/orbbec_test_ws
rosdep install --from-paths src --ignore-src -r -y
sudo apt install libgflags-dev ros-$ROS_DISTRO-image-geometry ros-$ROS_DISTRO-camera-info-manager
sudo apt install ros-$ROS_DISTRO-image-transport ros-$ROS_DISTRO-image-publisher
sudo apt install libgoogle-glog-dev libusb-1.0-0-dev libeigen3-dev
- 编译
# Build
cd ~/orbbec_test_ws
catkin_make
- 设置ROS环境
# Set workspace environment
echo "source ~/orbbec_test_ws/devel/setup.bash" >> ~/.bashrc
source ~/orbbec_test_ws/devel/setup.bash
- 设置udev
# Set udev rules for camera
roscd orbbec_camera
cd script
sudo cp 99-obsensor-libusb.rules /etc/udev/rules.d/99-obsensor-libusb.rules
# Reset udev to activate rules for camera
sudo udevadm control --reload && sudo udevadm trigger
- 重启相机
重新插拔相机的电源及数据线。
测试
- 启动相机节点
# Terminal 1
roslaunch orbbec_camera femto_bolt.launch
- 启动RViz观察
# Terminal 2
rviz
- 获取相机内参等参数
# Terminal 3
rosservice call /camera/get_camera_params "{}"
# Terminal 4
rostopic echo /camera/depth/camera_info
# Terminal 5
rostopic echo /camera/color/camera_info
TroubleShooting
如果出现[ERROR] [1702263159.133516247]: Failed to initialize device uvc_open path=2-6-7.2 failed,return res-6 ,可以尝试重装libuvc库或重启相机节点。
git clone https://github.com/libuvc/libuvc
cd libuvc
mkdir build
cd build
cmake ..
make && sudo make install
sudo ldconfig
ROS2 Humble
测试环境为Ubuntu22.04 + Jetson Orin 64G Jetpack6.0 + ROS2 Humble
配置
方式一: 自动脚本配置
Auromix提供了Femto Bolt的ROS2自动配置脚本,复制以下命令到终端中使用:
wget -O $HOME/orbbec_femto_bolt_ros2_install.sh https://raw.githubusercontent.com/auromix/ros-install-one-click/main/orbbec_femto_bolt_ros2_install.sh && sudo chmod +x $HOME/orbbec_femto_bolt_ros2_install.sh && bash $HOME/orbbec_femto_bolt_ros2_install.sh && rm $HOME/orbbec_femto_bolt_ros2_install.sh
如果希望了解自动配置脚本的内容,可查看github上的ros-install-one-click项目。
方式二:手动配置
- 下载
# Create ROS2 workspace
mkdir -p ~/orbbec_test_ws/src && cd ~/orbbec_test_ws/src
# Download Camera ROS2 SDK
git clone https://github.com/orbbec/OrbbecSDK_ROS2.git
- 安装依赖
# Install dependencies
cd ~/orbbec_test_ws
rosdep install --from-paths src --ignore-src -r -y
sudo apt install libgflags-dev nlohmann-json3-dev libgoogle-glog-dev
sudo apt install ros-$ROS_DISTRO-image-transport ros-$ROS_DISTRO-image-publisher ros-$ROS_DISTRO-camera-info-manager
- 构建
# Build release version
cd ~/orbbec_test_ws
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
- 设置ROS环境
# Set workspace environment
echo "source ~/orbbec_test_ws/install/setup.bash" >> ~/.bashrc
source ~/orbbec_test_ws/install/setup.bash
- 设置udev
# Set udev rules for camera
cd ~/orbbec_test_ws/src/OrbbecSDK_ROS2/orbbec_camera/scripts
sudo bash install_udev_rules.sh
# Reset udev to activate rules for camera
sudo udevadm control --reload-rules && sudo udevadm trigger
- 重启相机
重新插拔相机的电源及数据线。
测试
# Terminal 1
ros2 launch orbbec_camera femto_bolt.launch.py
# Terminal 2
rviz2
相关文章:
奥比中光 Femto Bolt相机ROS配置
机械臂手眼标定详解 作者: Herman Ye Auromix 测试环境: Ubuntu20.04/22.04 、ROS1 Noetic/ROS2 Humble、X86 PC/Jetson Orin、Kinect DK/Femto Bolt 更新日期: 2023/12/12 注1: Auromix 是一个机器人爱好者开源组织。 注2&#…...

scala表达式
1.8 表达式(重点) # 语句(statement):一段可执行的代码# 表达式(expression):一段可以被求值的代码,在Scala中一切都是表达式 - 表达式一般是一个语句块,可包含一条或者多条语句,多条语句使用“…...

uniapp,点击选中并改变颜色,第二次点击取消选中状态
一、效果图 二、代码实现 字符串的indexOf和数组的indexOf用法一致! arr.indexOf(item) 该方法返回某个元素在数组中的位置。若没检索到,则返回 -1。 关键代码:(通过:class绑定) :class"selectList.indexOf(sub.type) ! -1 ? right_ite…...

mmyolo的bbox_loss和检测bbox都是空
最近用mmyolo训练自己的数据集的时候发现训练的时候loss_bbox0,测试和eval的时候结果也全是空的,排除了数据集读取的问题,最后发现是config中自定义了自己的类别但是没有传给dataset。。。 简而言之,在自定义了数据集里的metainf…...
Linux——基本指令(二)
个人主页:日刷百题 系列专栏:〖C语言小游戏〗〖Linux〗〖数据结构〗 〖C语言〗 🌎欢迎各位→点赞👍收藏⭐️留言📝 写在前面: 紧接上一章,我们在理解接下来的命令之前,…...
渲染农场对工业产品渲染带来的意义与优势?
随着科技的进步,利用精细渲染图来呈现和推广工业设计的创新已成为行业标准。这些图像在产品研发、设计评审和营销阶段起着关键作用,同时对产品最终的成功也产生深远影响。然而,由于产品设计日渐复杂,制作渲染图的任务变得极具挑战…...
产品入门第二讲:Axure产品元件库的使用
📚📚 🏅我是默,一个在CSDN分享笔记的博主。📚📚 🌟在这里,我要推荐给大家我的专栏《Axure》。🎯🎯 🚀无论你是编程小白,还是…...
Linux 静默安装单机 Oracle 19C 数据库)
(第7天)Linux 静默安装单机 Oracle 19C 数据库
Linux 静默安装安装单机 Oracle 19C 数据库(第7天) 很多朋友经常会问,如果生产环境不允许安装 Linux 图形化界面怎么办?是不是有其他的方式来安装部署 Oracle 数据库呢?答案是肯定的! 我们可以通过命令行的方式来静默安装,不调用图形化界面,当然也就没有那么简单了!…...

智能优化算法应用:基于入侵杂草算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于入侵杂草算法3D无线传感器网络(WSN)覆盖优化 - 附代码 文章目录 智能优化算法应用:基于入侵杂草算法3D无线传感器网络(WSN)覆盖优化 - 附代码1.无线传感网络节点模型2.覆盖数学模型及分析3.入侵杂草算法4.实验参数设定5.算法结果6.…...
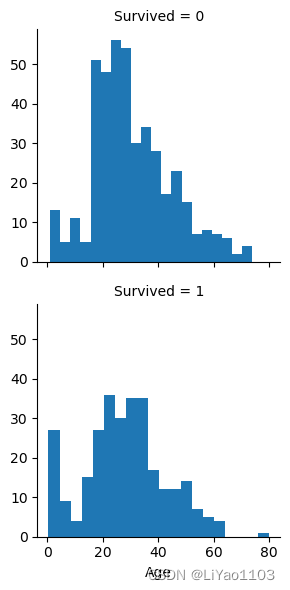
数据挖掘目标(Kaggle Titanic 生存测试)
import numpy as np import pandas as pd import matplotlib.pyplot as plt import seaborn as sns1.数据导入 In [2]: train_data pd.read_csv(r../老师文件/train.csv) test_data pd.read_csv(r../老师文件/test.csv) labels pd.read_csv(r../老师文件/label.csv)[Su…...
【Vue】router.push用法实现路由跳转
目录 router.push用法 在Login.vue中 在Register.vue中 上一篇:登录与注册界面的制作 https://blog.csdn.net/m0_67930426/article/details/134895214?spm1001.2014.3001.5502 制作了登录与注册界面,并介绍了相关表单元素即属性的用法 在登录页面…...
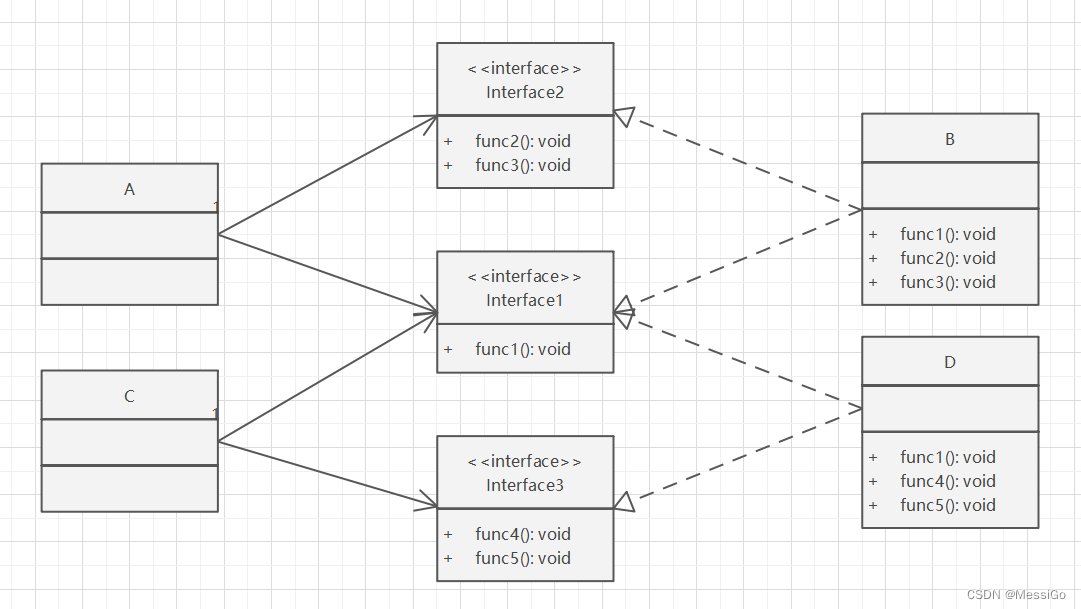
设计原则 | 接口隔离原则
一、接口隔离原则 1、原理 客户端不应该依赖它不需要的接口,即一个类对另一个类的依赖应该建立在最小的接口上。如果强迫客户端依赖于那些它们不使用的接口,那么客户端就面临着这个未使用的接口的改变所带来的变更,这无意间导致了客户程序之…...
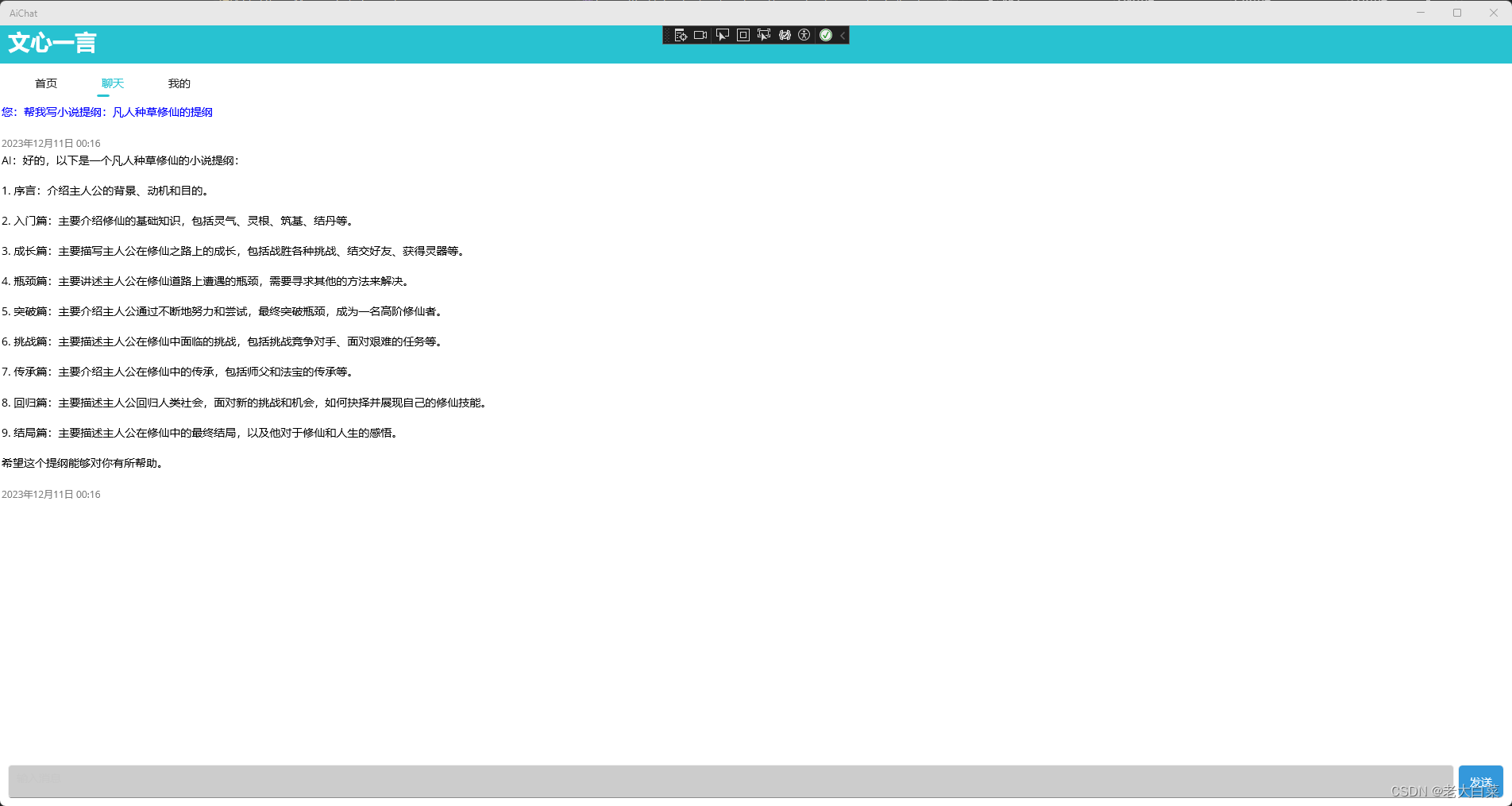
maui 调用文心一言开发的聊天APP 3
主要是对代码进行了优化 上一个版本写死了帐号跟密码 ,这一个帐本有户可以直接设置对相关的key以及secret如果设置错时,在聊天中也会返回提示。注册帐号时同时也设置了key及secrete升级到了net.8.0导出APK,上一个版本是导出abb.解决了变型问…...
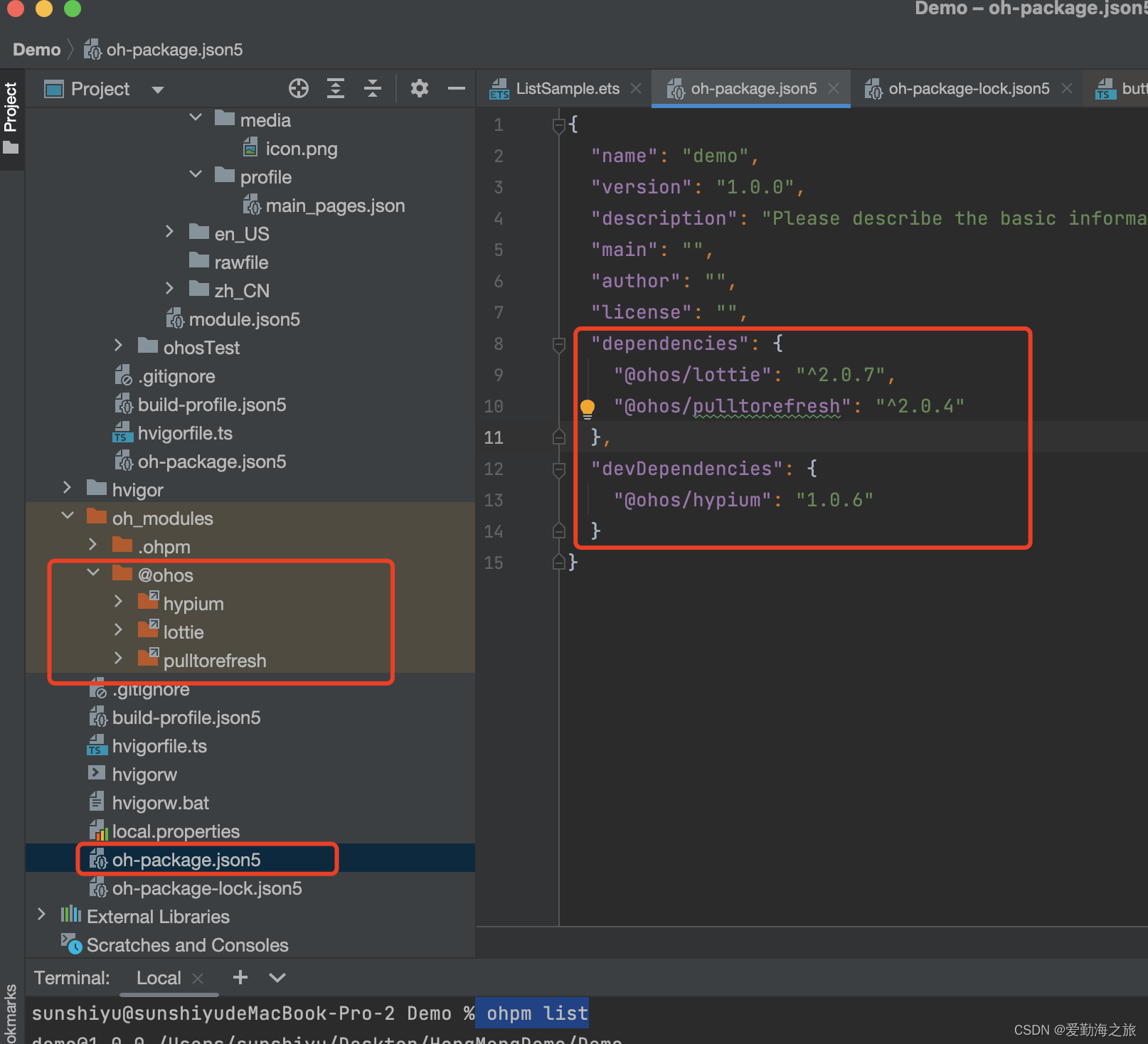
鸿蒙开发 - ohpm安装第三方库
前端开发难免使用第三方库,鸿蒙亦是如此,在使用 DevEco Studio 开发工具时,如何引入第三方库呢?操作步骤如下,假设你使用的是MacOS,假设你已经创建了了一个项目: 一、配置 HTTP Proxy 在打开了…...

[C++] new和delete
使用new时调用构造函数使用delete时调用析构函数 构造函数 使用new动态分配内存时,如果分配的是基本类型的内存,则不会调用构造函数。如果分配的是自定义类型的内存,则会调用构造函数进行对象的初始化。 例如: int* pInt new…...
OpenVINS学习2——VIRAL数据集eee01.bag运行
前言 周末休息了两天,接着做上周五那个VIRAL数据集没有运行成功的工作。现在的最新OpenVINS需要重新写配置文件,不像之前那样都写在launch里,因此需要根据数据集情况配置好estimator_config.yaml还有两个标定参数文件。 VIRAL数据集 VIRAL…...
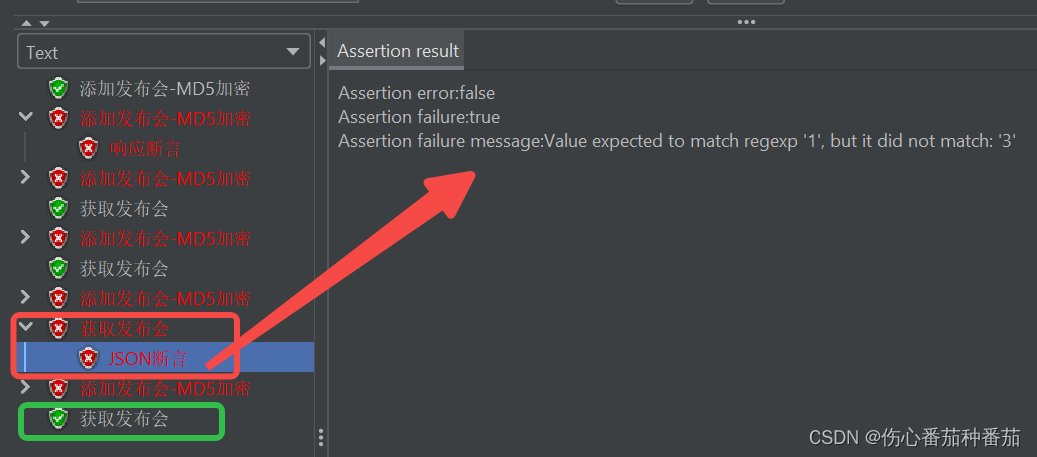
jemeter,断言:响应断言、Json断言
一、响应断言 接口A请求正常返回值如下: {"status": 10013, "message": "user sign timeout"} 在该接口下创建【响应断言】元件,配置如下: 若断言成功,则查看结果树的接口显示绿色,若…...
【vue实战项目】通用管理系统:信息列表,信息的编辑和删除
本文为博主的vue实战小项目系列中的第七篇,很适合后端或者才入门的小伙伴看,一个前端项目从0到1的保姆级教学。前面的内容: 【vue实战项目】通用管理系统:登录页-CSDN博客 【vue实战项目】通用管理系统:封装token操作…...
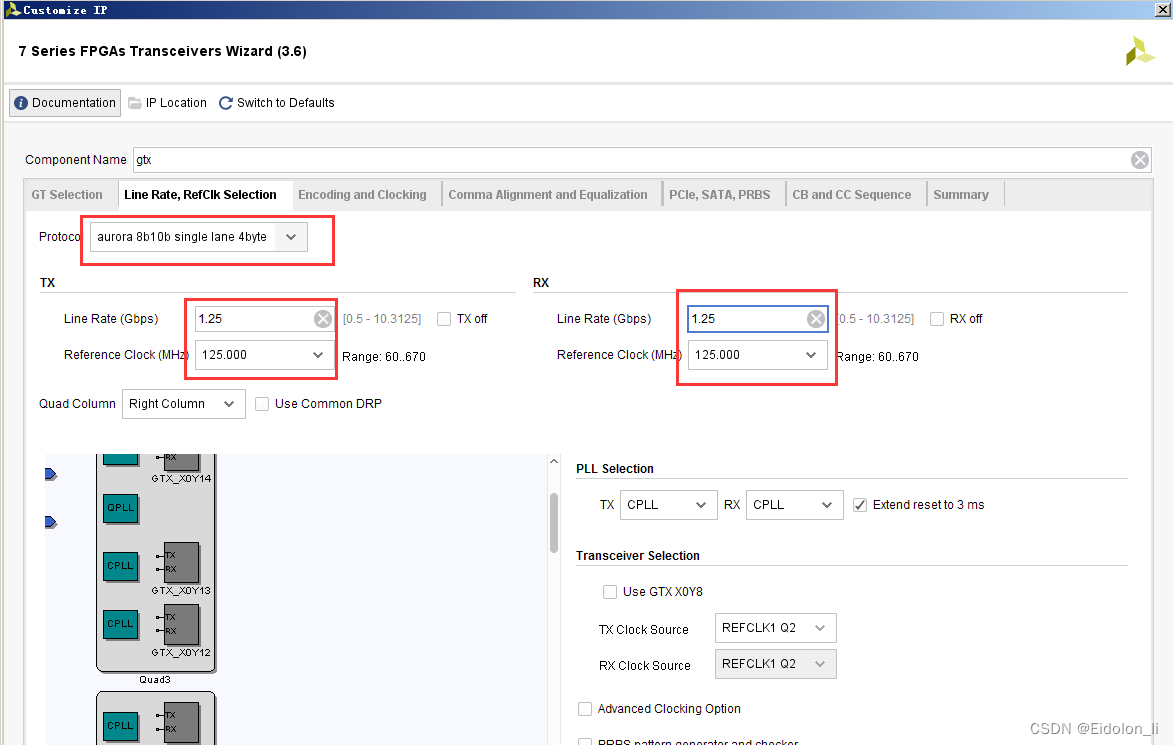
基于FPGA的视频接口之高速IO(光纤)
简介 对于高速IO口配置光纤,现在目前大部分开发板都有配置,且也有说明,在此根据自己的工作经验以及对于各开发板的说明归纳 通过高速IO接口,以及硬件配置,可以实现对于光纤的收发功能,由于GTX的速率在500Mbs到10Gbps之间,但通道高速io可配置光纤10G硬件,物理通完成,则…...
HTML实现页面
<!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>工商银行电子汇款单</title> </head> &…...

Leetcode 3576. Transform Array to All Equal Elements
Leetcode 3576. Transform Array to All Equal Elements 1. 解题思路2. 代码实现 题目链接:3576. Transform Array to All Equal Elements 1. 解题思路 这一题思路上就是分别考察一下是否能将其转化为全1或者全-1数组即可。 至于每一种情况是否可以达到…...
阿里云ACP云计算备考笔记 (5)——弹性伸缩
目录 第一章 概述 第二章 弹性伸缩简介 1、弹性伸缩 2、垂直伸缩 3、优势 4、应用场景 ① 无规律的业务量波动 ② 有规律的业务量波动 ③ 无明显业务量波动 ④ 混合型业务 ⑤ 消息通知 ⑥ 生命周期挂钩 ⑦ 自定义方式 ⑧ 滚的升级 5、使用限制 第三章 主要定义 …...

可靠性+灵活性:电力载波技术在楼宇自控中的核心价值
可靠性灵活性:电力载波技术在楼宇自控中的核心价值 在智能楼宇的自动化控制中,电力载波技术(PLC)凭借其独特的优势,正成为构建高效、稳定、灵活系统的核心解决方案。它利用现有电力线路传输数据,无需额外布…...
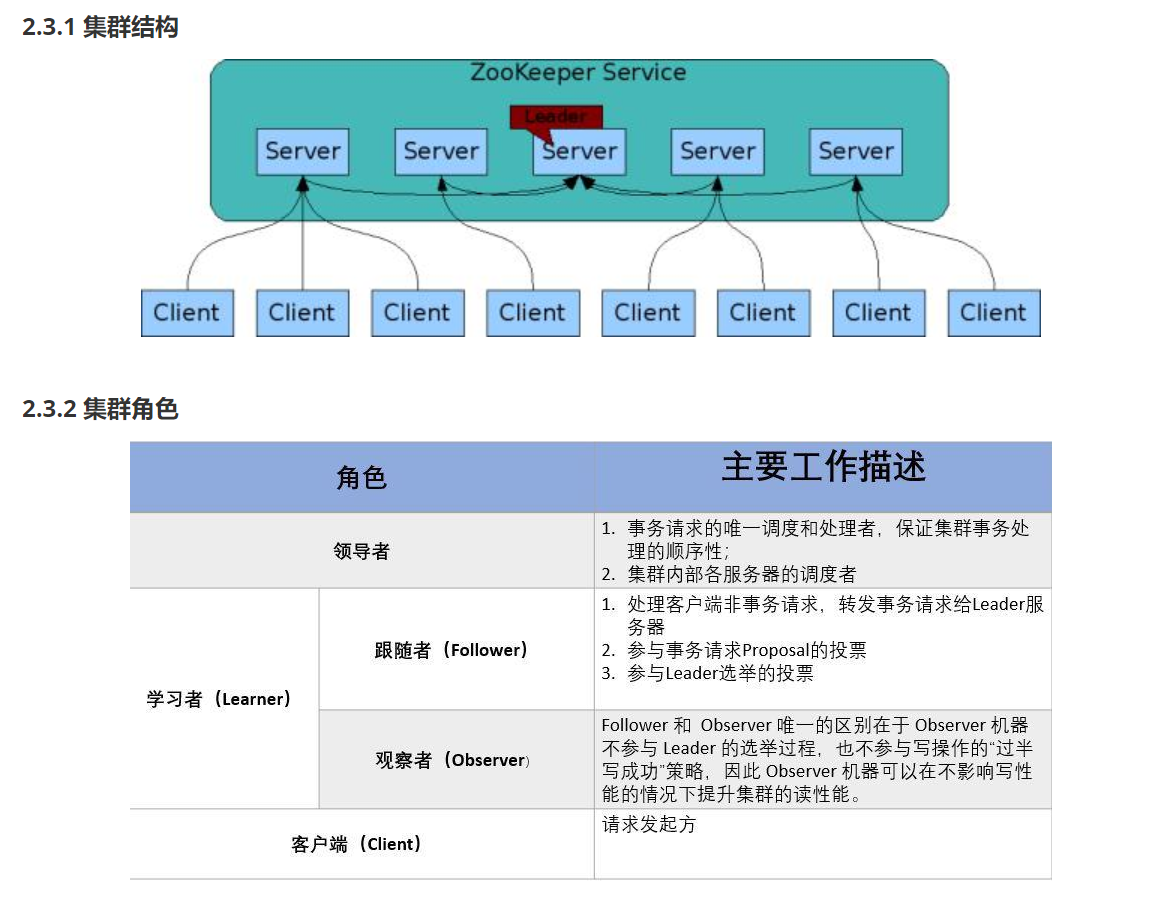
HDFS分布式存储 zookeeper
hadoop介绍 狭义上hadoop是指apache的一款开源软件 用java语言实现开源框架,允许使用简单的变成模型跨计算机对大型集群进行分布式处理(1.海量的数据存储 2.海量数据的计算)Hadoop核心组件 hdfs(分布式文件存储系统)&a…...

招商蛇口 | 执笔CID,启幕低密生活新境
作为中国城市生长的力量,招商蛇口以“美好生活承载者”为使命,深耕全球111座城市,以央企担当匠造时代理想人居。从深圳湾的开拓基因到西安高新CID的战略落子,招商蛇口始终与城市发展同频共振,以建筑诠释对土地与生活的…...

OD 算法题 B卷【正整数到Excel编号之间的转换】
文章目录 正整数到Excel编号之间的转换 正整数到Excel编号之间的转换 excel的列编号是这样的:a b c … z aa ab ac… az ba bb bc…yz za zb zc …zz aaa aab aac…; 分别代表以下的编号1 2 3 … 26 27 28 29… 52 53 54 55… 676 677 678 679 … 702 703 704 705;…...
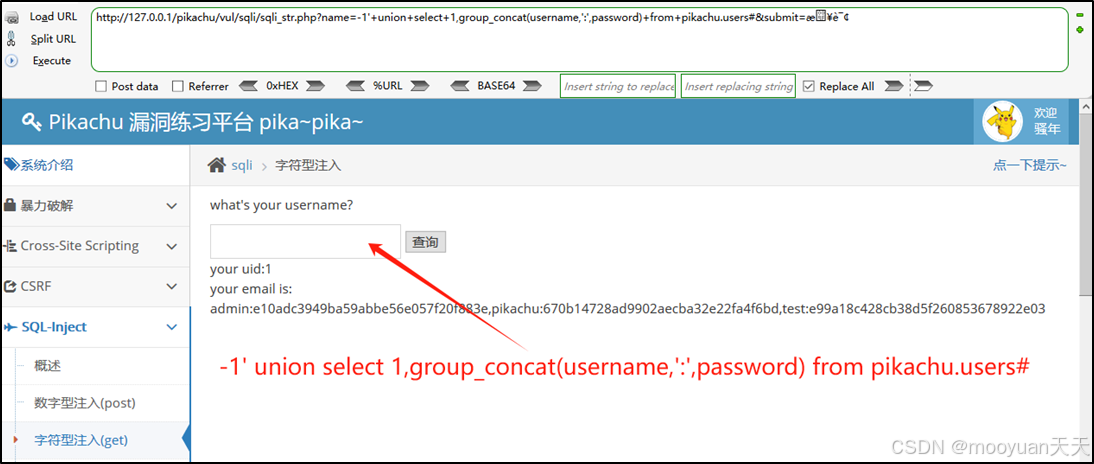
pikachu靶场通关笔记19 SQL注入02-字符型注入(GET)
目录 一、SQL注入 二、字符型SQL注入 三、字符型注入与数字型注入 四、源码分析 五、渗透实战 1、渗透准备 2、SQL注入探测 (1)输入单引号 (2)万能注入语句 3、获取回显列orderby 4、获取数据库名database 5、获取表名…...
:工厂方法模式、单例模式和生成器模式)
上位机开发过程中的设计模式体会(1):工厂方法模式、单例模式和生成器模式
简介 在我的 QT/C 开发工作中,合理运用设计模式极大地提高了代码的可维护性和可扩展性。本文将分享我在实际项目中应用的三种创造型模式:工厂方法模式、单例模式和生成器模式。 1. 工厂模式 (Factory Pattern) 应用场景 在我的 QT 项目中曾经有一个需…...
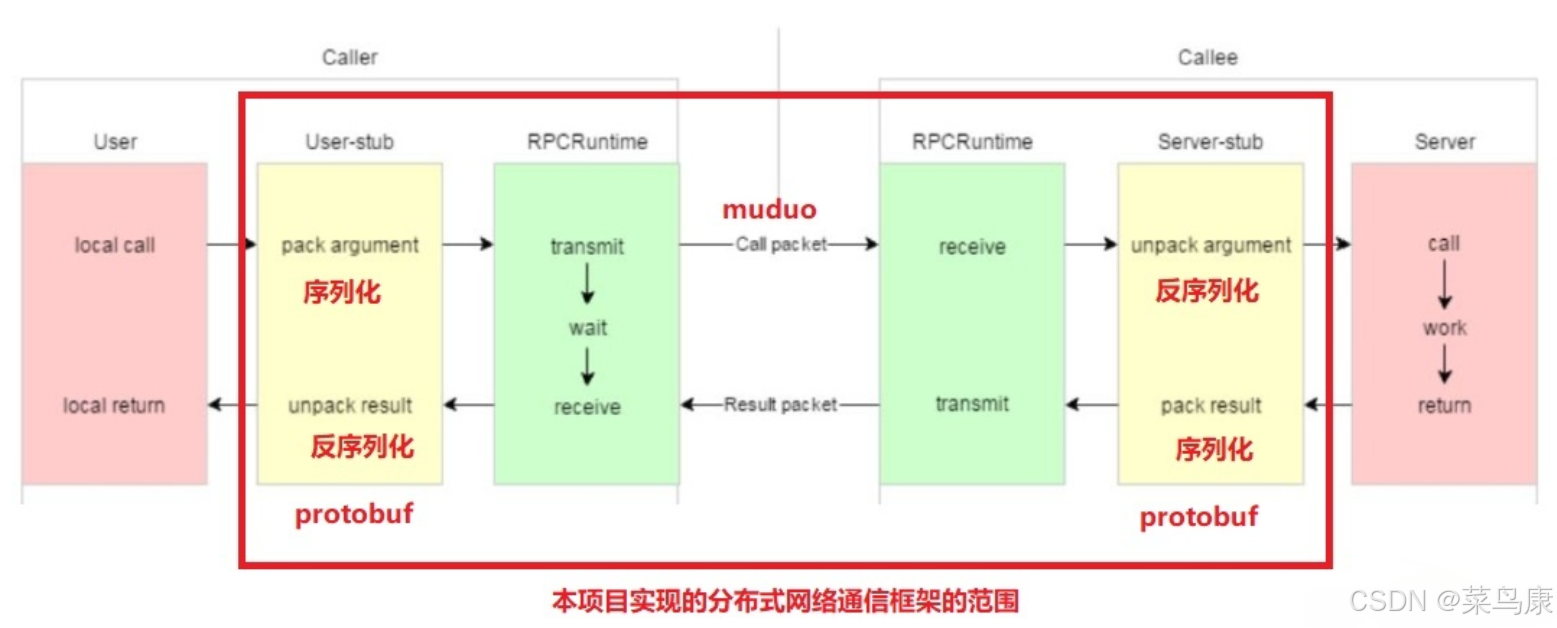
C++实现分布式网络通信框架RPC(2)——rpc发布端
有了上篇文章的项目的基本知识的了解,现在我们就开始构建项目。 目录 一、构建工程目录 二、本地服务发布成RPC服务 2.1理解RPC发布 2.2实现 三、Mprpc框架的基础类设计 3.1框架的初始化类 MprpcApplication 代码实现 3.2读取配置文件类 MprpcConfig 代码实现…...
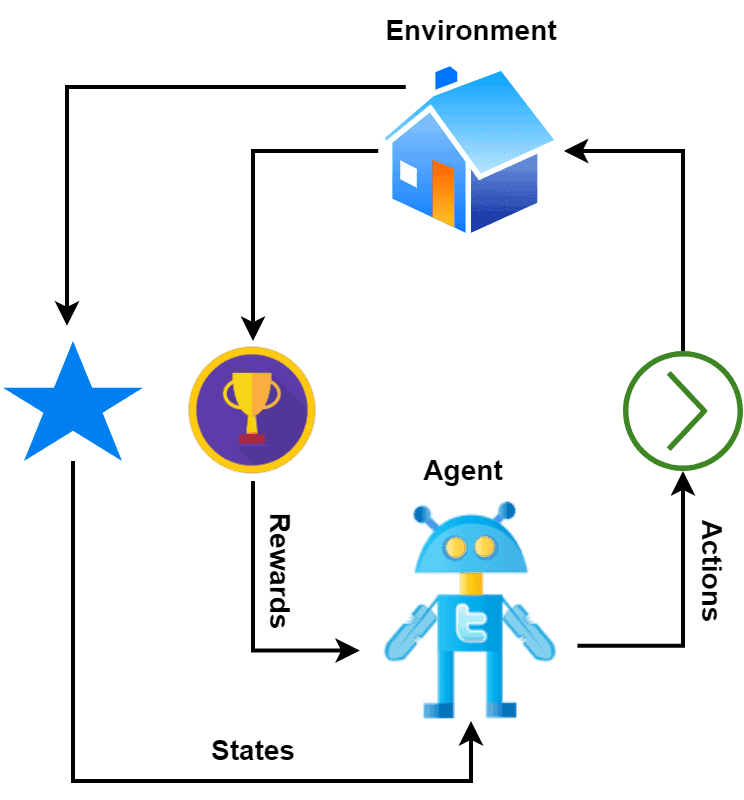
【深度学习新浪潮】什么是credit assignment problem?
Credit Assignment Problem(信用分配问题) 是机器学习,尤其是强化学习(RL)中的核心挑战之一,指的是如何将最终的奖励或惩罚准确地分配给导致该结果的各个中间动作或决策。在序列决策任务中,智能体执行一系列动作后获得一个最终奖励,但每个动作对最终结果的贡献程度往往…...