成都工业学院2021级操作系统专周课程设计FCFS,SSTF,SCAN,LOOK算法的实现
运行环境
操作系统:Windows 11 家庭版
运行软件:CLion 2023.2.2
源代码文件
#include <iostream>
#include <vector>
#include <algorithm>
#include <random>
using namespace std;// 生成随机数
int generateRandomNumber(int min, int max) {random_device rd;mt19937 gen(rd());uniform_int_distribution<> dis(min, max);return dis(gen);
}// 计算引臂移动量
int calculateArmMovement(const vector<int>& movementSequence) {int movement = 0;for (int i = 1; i < movementSequence.size(); ++i) {movement += abs(movementSequence[i] - movementSequence[i-1]);}return movement;
}// 计算寻道时间
int calculateSeekTime(int armMovement, int timePerTrack) {return armMovement * timePerTrack;
}// 计算平均旋转延迟时间
int calculateRotationDelay(int armMovement, int diskSpeed) {return (armMovement * 60000) / diskSpeed; // 因转速为转/分钟,转成毫秒需要乘以60000
}// 计算传输时间
int calculateTransferTime(int numRequests, int sectorsPerTrack, int sectorSize, int diskSpeed) {int transferTime = (numRequests * sectorsPerTrack * sectorSize * 1000) / diskSpeed; // 字节数除以转速得到毫秒数return transferTime;
}// 计算总处理时间
int calculateTotalProcessingTime(int seekTime, int rotationDelay, int transferTime) {return seekTime + rotationDelay + transferTime;
}// 显示引臂移动序列
void displayArmMovementSequence(const vector<int>& movementSequence) {for (int i = 0; i < movementSequence.size(); ++i) {cout << movementSequence[i] << " ";}cout << endl;
}// SSTF算法
void sstfAlgorithm(vector<int>& ioRequests, int currentTrack, int timePerTrack, int diskSpeed, int sectorsPerTrack, int sectorSize) {cout << "SSTF算法:" << endl;vector<int> armMovementSequence;armMovementSequence.push_back(currentTrack); // 先添加当前磁道到移动序列while (!ioRequests.empty()) {int minDistance = INT_MAX;int nextTrack = -1;for (int i = 0; i < ioRequests.size(); ++i) {int distance = abs(currentTrack - ioRequests[i]);if (distance < minDistance) {minDistance = distance;nextTrack = ioRequests[i];}}armMovementSequence.push_back(nextTrack);currentTrack = nextTrack;ioRequests.erase(find(ioRequests.begin(), ioRequests.end(), nextTrack));}displayArmMovementSequence(armMovementSequence);int armMovement = calculateArmMovement(armMovementSequence);int seekTime = calculateSeekTime(armMovement, timePerTrack);int rotationDelay = calculateRotationDelay(armMovement, diskSpeed);int numRequests = ioRequests.size();int transferTime = calculateTransferTime(numRequests, sectorsPerTrack, sectorSize, diskSpeed);int totalProcessingTime = calculateTotalProcessingTime(seekTime, rotationDelay, transferTime);cout << "引臂移动量: " << armMovement << endl;cout << "寻道时间: " << seekTime << " 毫秒" << endl;cout << "平均旋转延迟时间: " << rotationDelay << " 毫秒" << endl;cout << "传输时间: " << transferTime << " 毫秒" << endl;cout << "所有访问处理时间: " << totalProcessingTime << " 毫秒" << endl;
}//SCAN算法
void scanAlgorithm(vector<int>& ioRequests, int currentTrack, int timePerTrack, int diskSpeed, int sectorsPerTrack, int sectorSize) {cout << "SCAN算法:" << endl;vector<int> scanArmMovementSequence;int maxTrack = *max_element(ioRequests.begin(), ioRequests.end());int minTrack = *min_element(ioRequests.begin(), ioRequests.end());scanArmMovementSequence.push_back(currentTrack);vector<int> tempStack;vector<bool> visitedTracks(200, false); // 初始化标记数组,200是磁道的数量if (currentTrack >= maxTrack) {// 先向内扫描tempStack.push_back(0); // 添加0进入栈visitedTracks[0] = true;for (int track = currentTrack - 1; track >= minTrack; --track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end() && !visitedTracks[track]) {tempStack.push_back(track);visitedTracks[track] = true;}}sort(tempStack.begin(), tempStack.end()); // 对栈进行排序// 将栈中的磁道添加到移动序列for (int track : tempStack) {scanArmMovementSequence.push_back(track);}// 到达最小磁道号后折返,向外扫描for (int track = minTrack + 1; track <= maxTrack; ++track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end() && !visitedTracks[track]) {scanArmMovementSequence.push_back(track);visitedTracks[track] = true;}}} else {// 先向外扫描tempStack.push_back(199); // 添加199进入栈visitedTracks[199] = true;for (int track = currentTrack + 1; track <= maxTrack; ++track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end() && !visitedTracks[track]) {tempStack.push_back(track);visitedTracks[track] = true;}}sort(tempStack.begin(), tempStack.end()); // 对栈进行排序// 将栈中的磁道添加到移动序列for (int track : tempStack) {scanArmMovementSequence.push_back(track);}// 到达最大磁道号后折返,向内扫描for (int track = maxTrack - 1; track >= minTrack; --track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end() && !visitedTracks[track]) {scanArmMovementSequence.push_back(track);visitedTracks[track] = true;}}}displayArmMovementSequence(scanArmMovementSequence);int scanArmMovement = calculateArmMovement(scanArmMovementSequence);int scanSeekTime = calculateSeekTime(scanArmMovement, timePerTrack);int scanRotationDelay = calculateRotationDelay(scanArmMovement, diskSpeed);int scanNumRequests = ioRequests.size();int scanTransferTime = calculateTransferTime(scanNumRequests, sectorsPerTrack, sectorSize, diskSpeed);int scanTotalProcessingTime = calculateTotalProcessingTime(scanSeekTime, scanRotationDelay, scanTransferTime);cout << "引臂移动量: " << scanArmMovement << endl;cout << "寻道时间: " << scanSeekTime << " 毫秒" << endl;cout << "平均旋转延迟时间: " << scanRotationDelay << " 毫秒" << endl;cout << "传输时间: " << scanTransferTime << " 毫秒" << endl;cout << "所有访问处理时间: " << scanTotalProcessingTime << " 毫秒" << endl;// 在最后释放visitedTracks的空间visitedTracks.clear();displayArmMovementSequence(scanArmMovementSequence);
}// LOOK算法
void lookAlgorithm(vector<int>& ioRequests, int currentTrack, string direction, int timePerTrack, int diskSpeed, int sectorsPerTrack, int sectorSize) {cout << "LOOK算法:" << endl;vector<int> armMovementSequence;int maxTrack = *max_element(ioRequests.begin(), ioRequests.end());int minTrack = *min_element(ioRequests.begin(), ioRequests.end());armMovementSequence.push_back(currentTrack); // 先添加当前磁道到移动序列if (direction == "outward") {// 向外扫描for (int track = currentTrack + 1; track <= maxTrack; ++track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end()) {armMovementSequence.push_back(track);}}// 向内扫描for (int track = currentTrack - 1; track >= minTrack; --track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end()) {armMovementSequence.push_back(track);}}} else {// 向内扫描for (int track = currentTrack - 1; track >= minTrack; --track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end()) {armMovementSequence.push_back(track);}}// 向外扫描for (int track = currentTrack + 1; track <= maxTrack; ++track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end()) {armMovementSequence.push_back(track);}}}displayArmMovementSequence(armMovementSequence);int armMovement = calculateArmMovement(armMovementSequence);int seekTime = calculateSeekTime(armMovement, timePerTrack);int rotationDelay = calculateRotationDelay(armMovement, diskSpeed);int numRequests = ioRequests.size();int transferTime = calculateTransferTime(numRequests, sectorsPerTrack, sectorSize, diskSpeed);int totalProcessingTime = calculateTotalProcessingTime(seekTime, rotationDelay, transferTime);cout << "引臂移动量: " << armMovement << endl;cout << "寻道时间: " << seekTime << " 毫秒" << endl;cout << "平均旋转延迟时间: " << rotationDelay << " 毫秒" << endl;cout << "传输时间: " << transferTime << " 毫秒" << endl;cout << "所有访问处理时间: " << totalProcessingTime << " 毫秒" << endl;
}// 根据选择的调度算法进行处理
void processAlgorithm(vector<int>& ioRequests, int currentTrack, int timePerTrack, int startupTime, int diskSpeed, int sectorsPerTrack, int sectorSize, const string& algorithmName) {vector<int> armMovementSequence;if (algorithmName == "FCFS") {armMovementSequence = ioRequests; // 直接按照顺序处理请求} else if (algorithmName == "SSTF") {sstfAlgorithm(ioRequests, currentTrack, timePerTrack, diskSpeed, sectorsPerTrack, sectorSize);return;} else if (algorithmName == "SCAN") {scanAlgorithm(ioRequests, currentTrack, timePerTrack, diskSpeed, sectorsPerTrack, sectorSize);return;} else if (algorithmName == "LOOK") {lookAlgorithm(ioRequests, currentTrack, "outward", timePerTrack, diskSpeed, sectorsPerTrack, sectorSize);return;} else {cout << "未知的调度算法:" << algorithmName << endl;return;}armMovementSequence.insert(armMovementSequence.begin(), currentTrack); // 加入初始位置displayArmMovementSequence(armMovementSequence);int armMovement = calculateArmMovement(armMovementSequence);int seekTime = calculateSeekTime(armMovement, timePerTrack);int rotationDelay = calculateRotationDelay(armMovement, diskSpeed);int numRequests = ioRequests.size();int transferTime = calculateTransferTime(numRequests, sectorsPerTrack, sectorSize, diskSpeed);int totalProcessingTime = calculateTotalProcessingTime(seekTime, rotationDelay, transferTime);cout << "引臂移动量: " << armMovement << endl;cout << "寻道时间: " << seekTime << " 毫秒" << endl;cout << "平均旋转延迟时间: " << rotationDelay << " 毫秒" << endl;cout << "传输时间: " << transferTime << " 毫秒" << endl;cout << "所有访问处理时间: " << totalProcessingTime << " 毫秒" << endl;
}int main() {int initialTrack; // 磁头初始位置cout << "请输入磁头初始位置:";cin >> initialTrack;int timePerTrack; // 跨越1个磁道所用时间(毫秒)int startupTime; // 启动时间(毫秒)int diskSpeed; // 磁盘转速(转/分钟)int sectorsPerTrack; // 每磁道扇区数int sectorSize; // 每扇区字节数cout << "请输入跨越1个磁道所用时间(毫秒):";cin >> timePerTrack;cout << "请输入启动时间(毫秒):";cin >> startupTime;cout << "请输入磁盘转速(转/分钟):";cin >> diskSpeed;cout << "请输入每磁道扇区数:";cin >> sectorsPerTrack;cout << "请输入每扇区字节数:";cin >> sectorSize;vector<int> ioRequests;vector<int> diskTrackNumbers;for(int i=1; i<201; i++){diskTrackNumbers.push_back(i);} // 磁道号固定为0到10int currentTrack = initialTrack; // 修改为用户输入的初始位置string direction = (generateRandomNumber(0, 1) == 0) ? "outward" : "inward"; // 添加这一行以初始化方向// 生成随机磁道I/O请求序列cout << "生成的随机磁道I/O请求序列:" << endl;for (int i = 0; i < 6; ++i) {int track = generateRandomNumber(0, diskTrackNumbers.size() - 1);ioRequests.push_back(diskTrackNumbers[track]);cout << ioRequests[i] << " ";}cout << endl;// 选择调度算法string algorithmName;cout << "请选择调度算法(FCFS、SSTF、SCAN、LOOK):";cin >> algorithmName;// 处理IO请求processAlgorithm(ioRequests, currentTrack, timePerTrack, startupTime, diskSpeed, sectorsPerTrack, sectorSize, algorithmName);return 0;
}
源代码示例
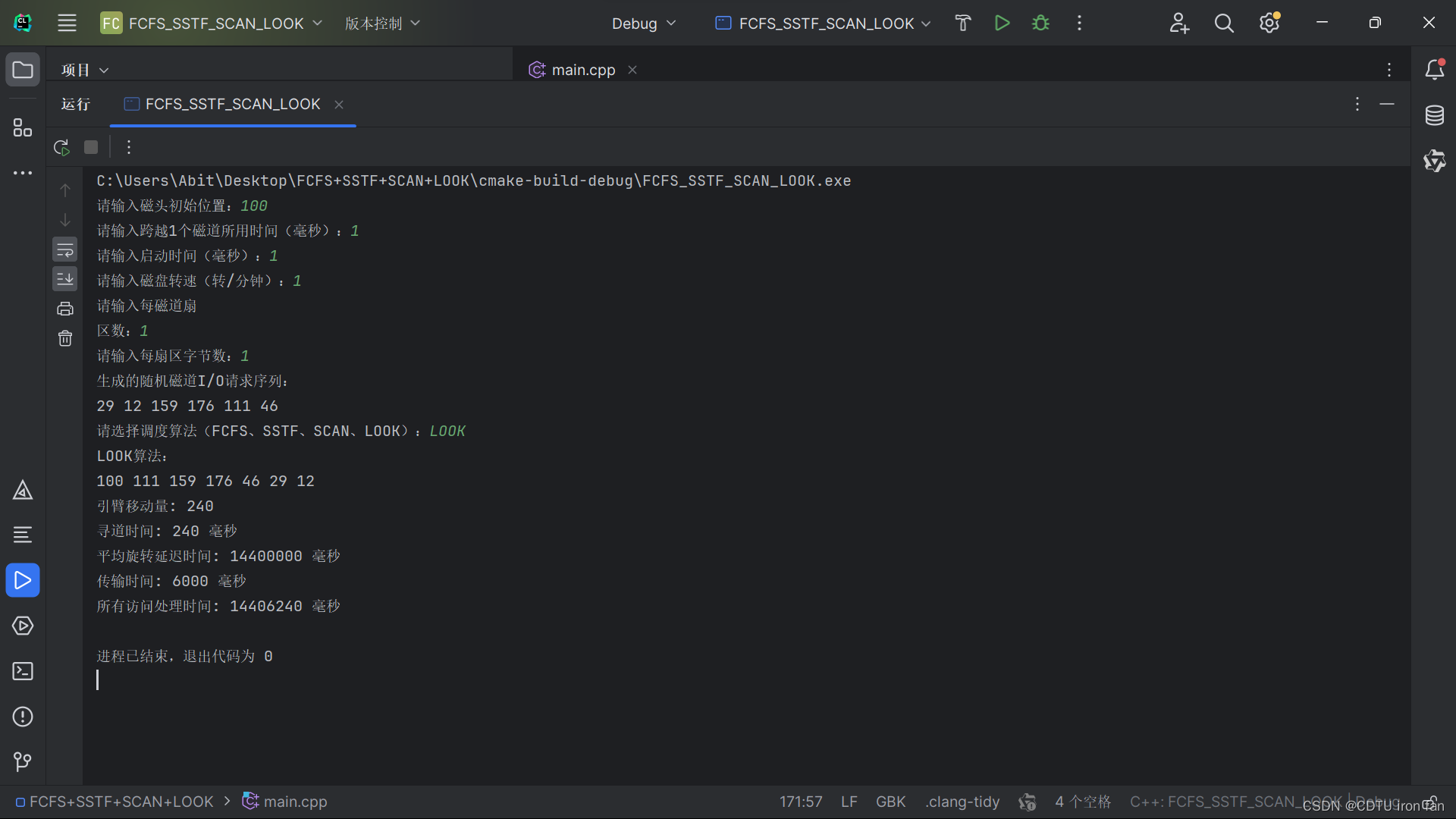
运行结果截图
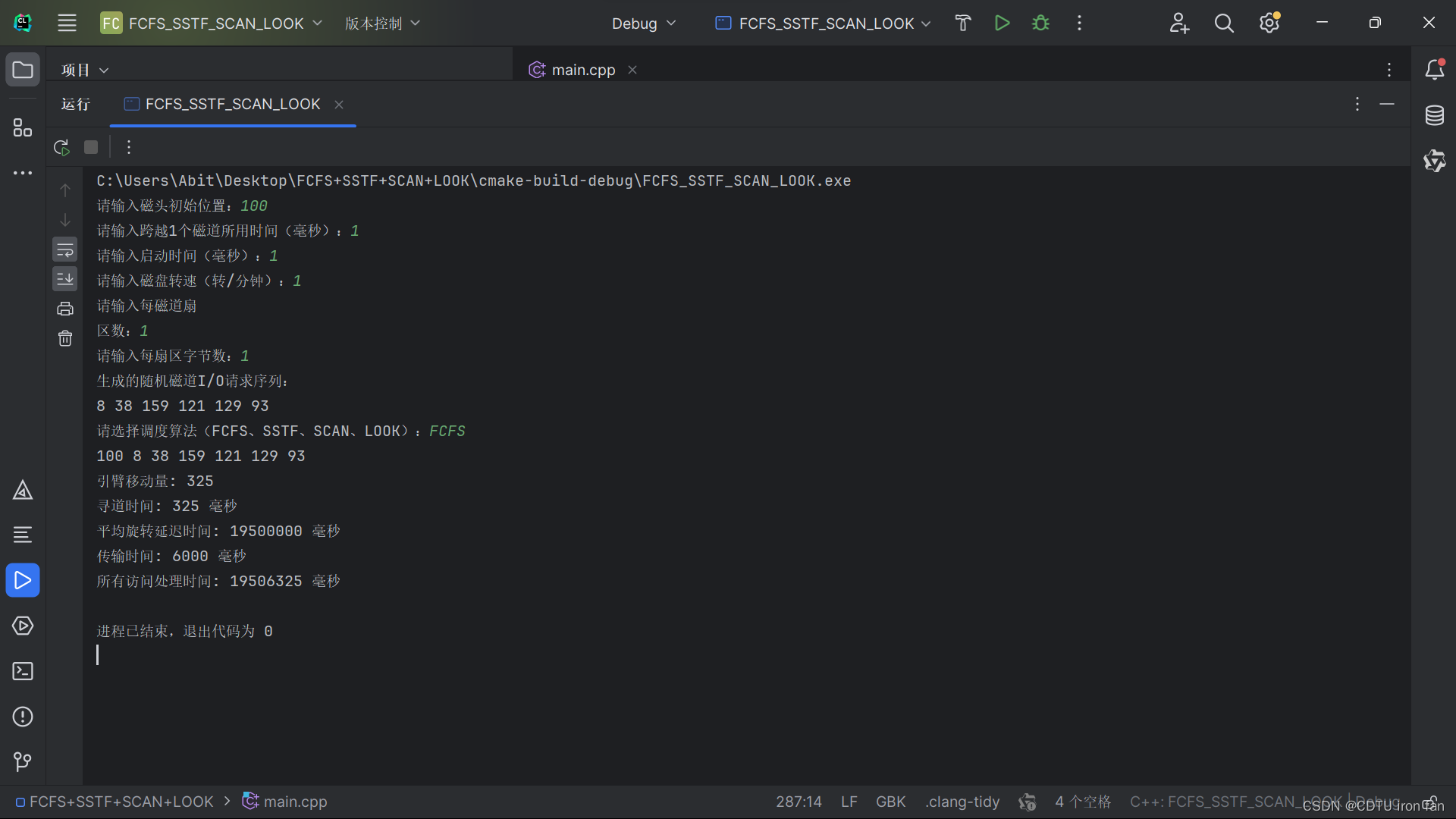
FCFS算法
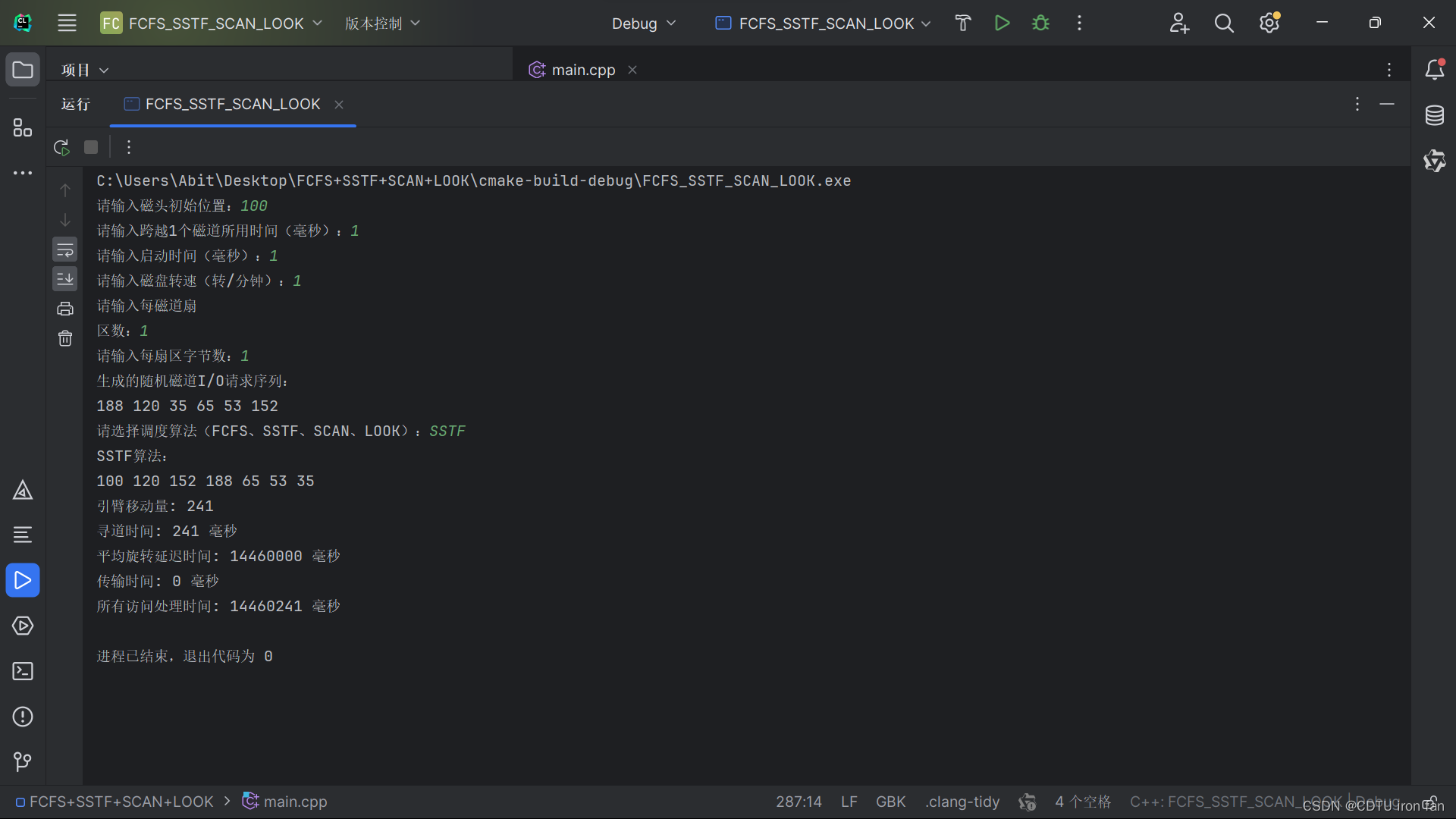
SSTF算法
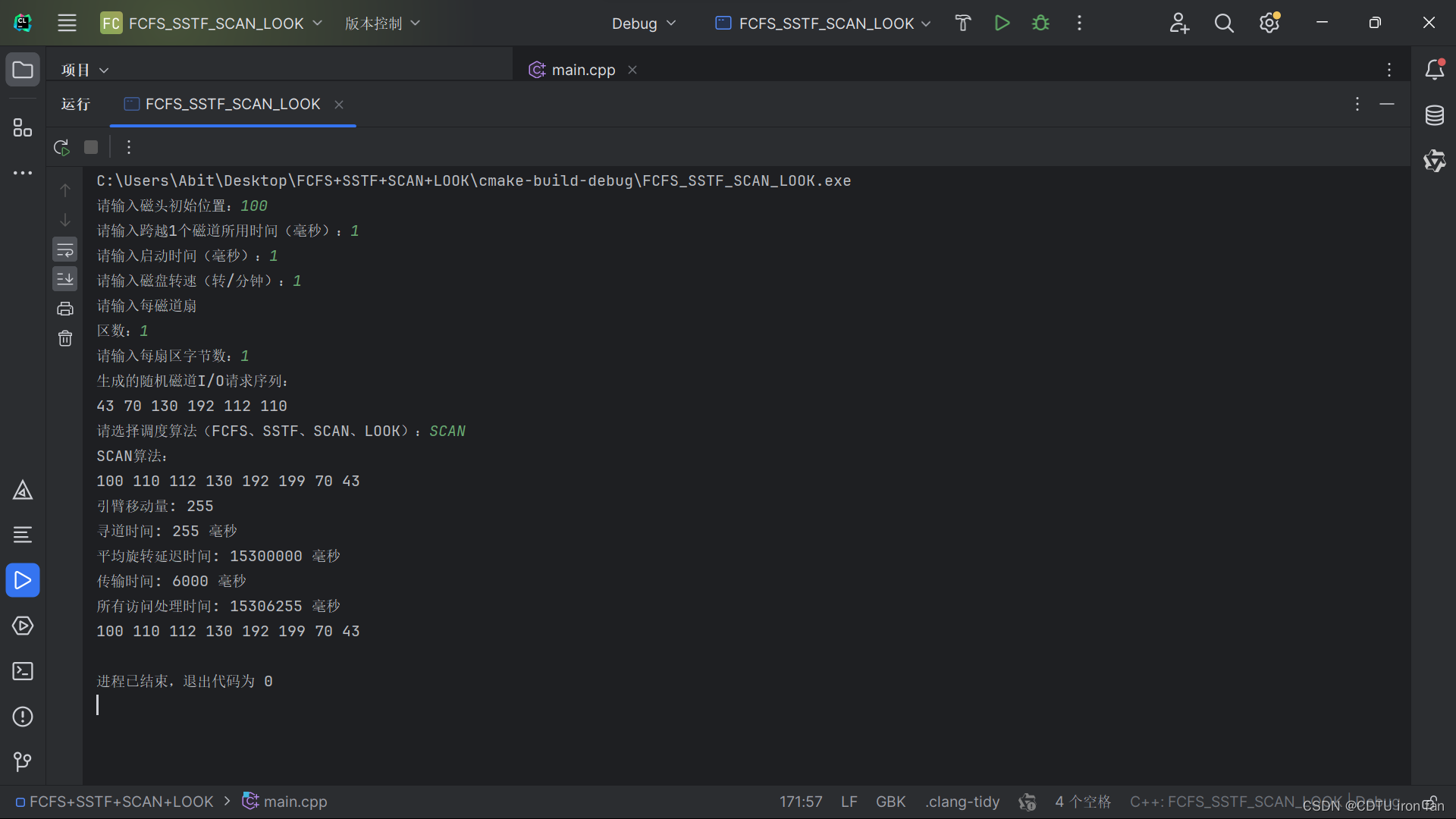
SCAN算法
LOOK算法
注意事项
1、算法可能有点问题,大多数情况下是没有问题的
2、由于不同编译器可能不兼容,所以本人把代码都写在一起,避免了分文件造成的错误
相关文章:
成都工业学院2021级操作系统专周课程设计FCFS,SSTF,SCAN,LOOK算法的实现
运行环境 操作系统:Windows 11 家庭版 运行软件:CLion 2023.2.2 源代码文件 #include <iostream> #include <vector> #include <algorithm> #include <random> using namespace std;// 生成随机数 int generateRandomNumber…...
【51单片机系列】矩阵按键扩展实验
本文对矩阵按键的一个扩展,利用矩阵按键和动态数码管设计一个简易计算器。代码参考:https://blog.csdn.net/weixin_47060099/article/details/106664393 实现功能:使用矩阵按键,实现一个简易计算器,将计算数据及计算结…...

大数据云计算——Docker环境下部署Hadoop集群及运行集群案列
大数据云计算——Docker环境下部署Hadoop集群及运行集群案列 本文着重介绍了在Docker环境下部署Hadoop集群以及实际案例中的集群运行。首先,文章详细解释了Hadoop的基本概念和其在大数据处理中的重要性,以及为何选择在Docker环境下部署Hadoop集群。接着&…...
)
计算机网络链路层(期末、考研)
计算机网络总复习链接🔗 目录 组帧差错控制检错编码纠错编码 流量控制与可靠传输机制流量控制、可靠传输与滑动窗口机制单帧窗口与停止-等待协议多帧滑动窗口与后退N帧协议(GBN)多帧滑动窗口与选择重传协议 介质访问控制信道划分介质访问控制…...

洛谷 P8794 [蓝桥杯 2022 国 A] 环境治理
文章目录 [蓝桥杯 2022 国 A] 环境治理题目链接题目描述输入格式输出格式样例 #1样例输入 #1样例输出 #1 提示 思路解析CODE给点思考 [蓝桥杯 2022 国 A] 环境治理 题目链接 https://www.luogu.com.cn/problem/P8794 题目描述 LQ 国拥有 n n n 个城市,从 0 0 …...

力扣面试150题 | 买卖股票的最佳时期
力扣面试150题 | 买卖股票的最佳时期 题目描述解题思路代码实现 题目描述 121.买卖股票的最佳时期 给定一个数组 prices ,它的第 i 个元素 prices[i] 表示一支给定股票第 i 天的价格。 你只能选择 某一天 买入这只股票,并选择在 未来的某一…...
uniapp 之 图片 视频 文件上传
<view class"" style"padding: 24rpx 0"><text>相关资料 <text class"fs-26 color-666">(图片、视频、文档不超过9个)</text> </text><view class"flex align-center" style&…...

MIT线性代数笔记-第28讲-正定矩阵,最小值
目录 28.正定矩阵,最小值打赏 28.正定矩阵,最小值 由第 26 26 26讲的末尾可知在矩阵为实对称矩阵时,正定矩阵有以下四种判定方法(都是充要条件): 所有特征值都为正左上角所有 k k k阶子矩阵行列式都为正&…...
Python:五种算法RFO、GWO、DBO、HHO、SSA求解23个测试函数
一、五种算法介绍 (1)红狐优化算法(Red fox optimization,RFO) (2)灰狼优化算法(Grey Wolf Optimizer,GWO) (3)蜣螂优化算法(Dung beetle opti…...

如何参与开源项目
大家好,受卡哥邀请,和大家分享一下开源活动的相关经验。首先简要自我介绍一下,我目前在一所985研二在读,主要学习大数据方向,从去年开始参与开源活动近一年时间,也对多个Apache框架有所贡献。 由于学校或专…...
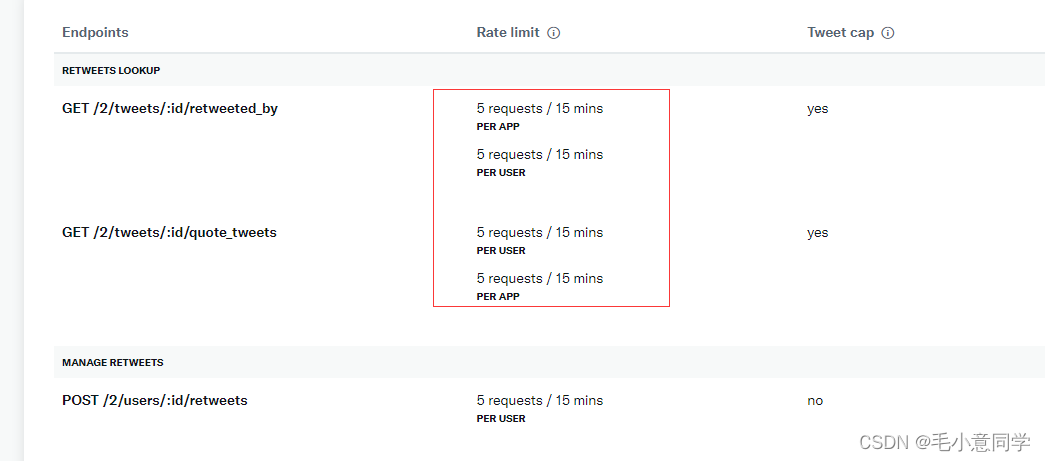
twitter开发如何避坑
此篇介绍在twitter开发过程中遇到的坑(尤其是费用的坑)。 一坑:免费接口少! 刚开始申请免费API使用的时候,twitter官方只会给你三个免费接口使用。 发twitter、删推文、查看用户信息。 这三个接口远远不够开发中使用…...
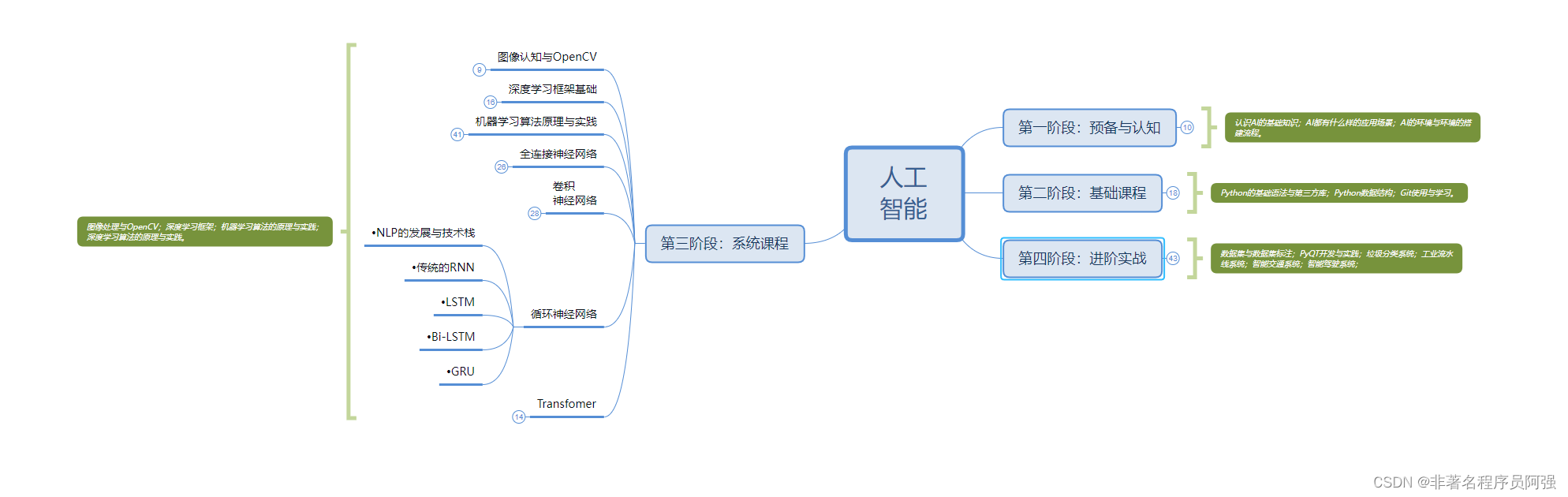
人工智能算法合集
人工智能(Artificial Intelligence,AI)作为当今世界最热门的技术领域之一,正日益改变着我们的生活方式、工作方式甚至整个社会结构。在人工智能领域中,算法是至关重要的一环,它们是实现人工智能技术应用的核…...
PythonStudio:一款国人写的python及窗口开发编辑IDE,可以替代pyqt designer等设计器了
本款软件只有十几兆,功能算是强大的,国人写的,很不错的python界面IDE.顶部有下载链接。下面有网盘下载链接,或者从官网直接下载。 目前产品免费,以后估计会有收费版本。主页链接:PythonStudio-硅量实验室 作…...

大模型应用_FastGPT
1 功能 整体功能,想解决什么问题 官方说明:FastGPT 是一个基于 LLM 大语言模型的知识库问答系统,提供开箱即用的数据处理、模型调用等能力。同时可以通过 Flow 可视化进行工作流编排,从而实现复杂的问答场景!个人体会…...

elasticsearch|大数据|elasticsearch的api部分实战操作以及用户和密码的管理
一, 前言 本文主要内容是通过elasticsearch的api来进行一些集群的管理和信息查询工作,以及elasticsearch用户的增删改查和密码的重设以及重置如何操作 接上文:elasticsearch|大数据|elasticsearch低版本集群的部署安装和安全增强---密码设…...

Android多进程和跨进程通讯方式
前言 我们经常开发过程中经常会听到线程和进程,在讲述Android进程多进程前我打算先简单梳理一下这俩者。 了解什么是进程与线程 进程: 系统中正在运行的一个应用程序,某个程序一旦运行就是一个进程,是资源分配的最小单位&#…...

通过Jenkins将应用发布到K8s1.24.3
一、准备基础环境 cat >> /etc/hosts <<EOF 192.168.180.210 k8s-master 192.168.180.200 k8s-node1 192.168.180.190 k8s-node2 192.168.180.180 gitlab 192.168.180.170 jenkins 192.168.180.160 harbor EOF 配置主机名 hostnamectl set-hostname k8s-master &am…...

正则表达式入门与实践
文章目录 一、为什么要有正则二、正则表达式基础概念三、Pattern与Matcher类的使用(一)Pattern类的常用方法(二)Matcher类的常用方法四、常用正则规则及其含义(一)规范表示(二)数量表示(三)逻辑运算符五、String对正则表达式的支持六、实践演练(一)匹配给定文本中的…...
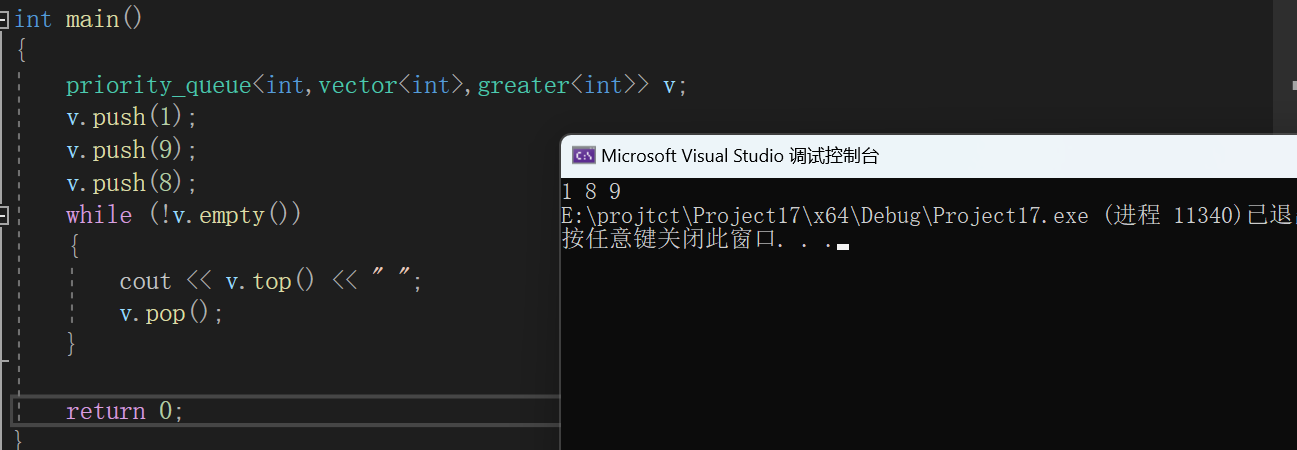
C++初阶(十六)优先级队列
📘北尘_:个人主页 🌎个人专栏:《Linux操作系统》《经典算法试题 》《C》 《数据结构与算法》 ☀️走在路上,不忘来时的初心 文章目录 一、priority_queue的介绍和使用1、priority_queue的介绍2、priority_queue的使用 二、priori…...
深入探索C语言中的二叉树:数据结构之旅
引言 在计算机科学领域,数据结构是基础中的基础。在众多数据结构中,二叉树因其在各种操作中的高效性而脱颖而出。二叉树是一种特殊的树形结构,每个节点最多有两个子节点:左子节点和右子节点。这种结构使得搜索、插入、删除等操作…...
日语AI面试高效通关秘籍:专业解读与青柚面试智能助攻
在如今就业市场竞争日益激烈的背景下,越来越多的求职者将目光投向了日本及中日双语岗位。但是,一场日语面试往往让许多人感到步履维艰。你是否也曾因为面试官抛出的“刁钻问题”而心生畏惧?面对生疏的日语交流环境,即便提前恶补了…...
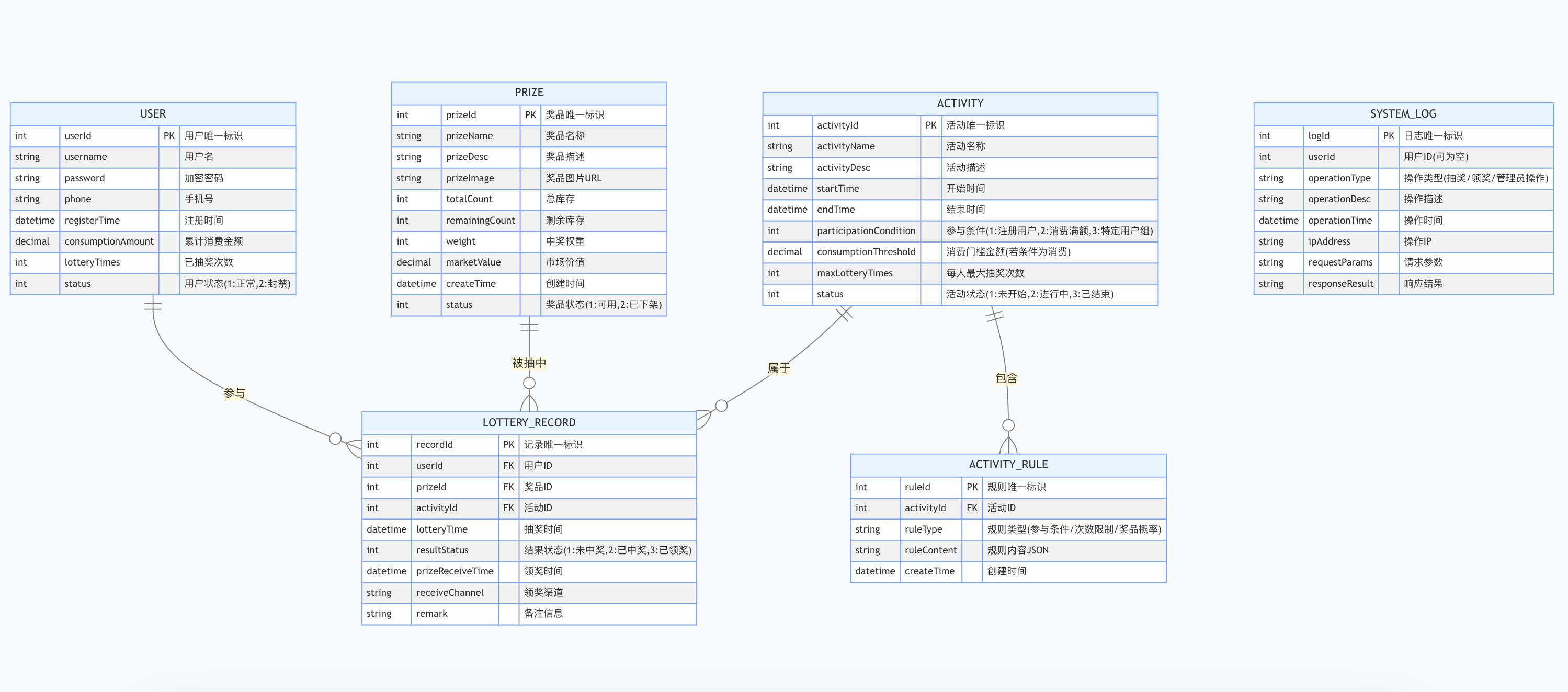
简易版抽奖活动的设计技术方案
1.前言 本技术方案旨在设计一套完整且可靠的抽奖活动逻辑,确保抽奖活动能够公平、公正、公开地进行,同时满足高并发访问、数据安全存储与高效处理等需求,为用户提供流畅的抽奖体验,助力业务顺利开展。本方案将涵盖抽奖活动的整体架构设计、核心流程逻辑、关键功能实现以及…...
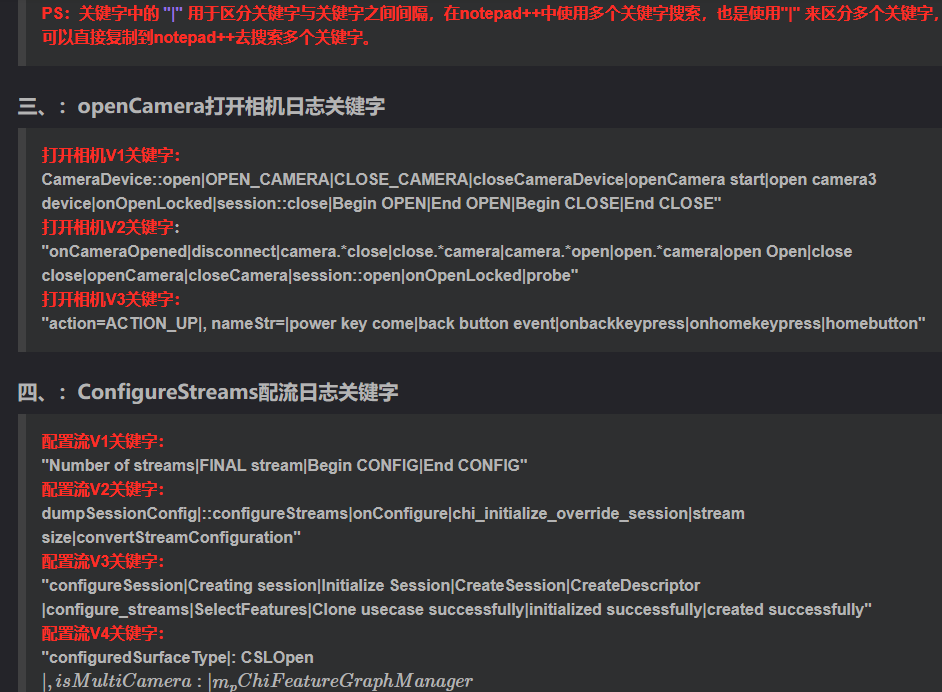
相机Camera日志实例分析之二:相机Camx【专业模式开启直方图拍照】单帧流程日志详解
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了: 这一篇我们开始讲: 目录 一、场景操作步骤 二、日志基础关键字分级如下 三、场景日志如下: 一、场景操作步骤 操作步…...

Golang dig框架与GraphQL的完美结合
将 Go 的 Dig 依赖注入框架与 GraphQL 结合使用,可以显著提升应用程序的可维护性、可测试性以及灵活性。 Dig 是一个强大的依赖注入容器,能够帮助开发者更好地管理复杂的依赖关系,而 GraphQL 则是一种用于 API 的查询语言,能够提…...
安宝特案例丨Vuzix AR智能眼镜集成专业软件,助力卢森堡医院药房转型,赢得辉瑞创新奖
在Vuzix M400 AR智能眼镜的助力下,卢森堡罗伯特舒曼医院(the Robert Schuman Hospitals, HRS)凭借在无菌制剂生产流程中引入增强现实技术(AR)创新项目,荣获了2024年6月7日由卢森堡医院药剂师协会࿰…...
springboot整合VUE之在线教育管理系统简介
可以学习到的技能 学会常用技术栈的使用 独立开发项目 学会前端的开发流程 学会后端的开发流程 学会数据库的设计 学会前后端接口调用方式 学会多模块之间的关联 学会数据的处理 适用人群 在校学生,小白用户,想学习知识的 有点基础,想要通过项…...
深入浅出深度学习基础:从感知机到全连接神经网络的核心原理与应用
文章目录 前言一、感知机 (Perceptron)1.1 基础介绍1.1.1 感知机是什么?1.1.2 感知机的工作原理 1.2 感知机的简单应用:基本逻辑门1.2.1 逻辑与 (Logic AND)1.2.2 逻辑或 (Logic OR)1.2.3 逻辑与非 (Logic NAND) 1.3 感知机的实现1.3.1 简单实现 (基于阈…...
Chromium 136 编译指南 Windows篇:depot_tools 配置与源码获取(二)
引言 工欲善其事,必先利其器。在完成了 Visual Studio 2022 和 Windows SDK 的安装后,我们即将接触到 Chromium 开发生态中最核心的工具——depot_tools。这个由 Google 精心打造的工具集,就像是连接开发者与 Chromium 庞大代码库的智能桥梁…...

毫米波雷达基础理论(3D+4D)
3D、4D毫米波雷达基础知识及厂商选型 PreView : https://mp.weixin.qq.com/s/bQkju4r6med7I3TBGJI_bQ 1. FMCW毫米波雷达基础知识 主要参考博文: 一文入门汽车毫米波雷达基本原理 :https://mp.weixin.qq.com/s/_EN7A5lKcz2Eh8dLnjE19w 毫米波雷达基础…...

TSN交换机正在重构工业网络,PROFINET和EtherCAT会被取代吗?
在工业自动化持续演进的今天,通信网络的角色正变得愈发关键。 2025年6月6日,为期三天的华南国际工业博览会在深圳国际会展中心(宝安)圆满落幕。作为国内工业通信领域的技术型企业,光路科技(Fiberroad&…...