论文阅读《DPS-Net: Deep Polarimetric Stereo Depth Estimation》
论文地址:https://openaccess.thecvf.com/content/ICCV2023/html/Tian_DPS-Net_Deep_Polarimetric_Stereo_Depth_Estimation_ICCV_2023_paper.html
概述
立体匹配模型难以处理无纹理场景的匹配,现有的方法通常假设物体表面是光滑的,或者光照是受控的,这些条件在实际场景中很难满足,只适用于物体级别的重建或者特定的拍摄环境。此外,这些方法还难以处理偏振图像中表面法向的固有歧义性,例如方位角和天顶角的歧义性(指从偏振图像中恢复表面法向量时,由于不同的反射类型和非线性方程的影响,可能存在多个解,导致法向量的方位角和天顶角不唯一),这些歧义性需要依赖于预先计算的粗糙深度或者已知的反射类型来解决。
针对这些问题,文中提出DPS-Net来基于先验几何知识与偏振立体知识用于估计两幅偏振立体图像的深度。通过构建RGB与偏振匹配代价体分别提取RGB与偏振域的匹配知识。针对立体匹配中的固有歧义问题,文中引入一种等深度代价体用于解决无纹理区域的匹配模糊性,该代价体是一种利用偏振信息和几何约束来消除方位角歧义的方法,它基于等深度轮廓与法向量方位角分量正交的性质,通过计算偏振图像中的偏振角和方位角之间的差异,构建一个统一的代价函数,同时考虑了漫反射和镜面反射的情况。此外,文中提出一种级联双GRU结构将极化的等深度约束和多域的视觉相似度融合起来,通过递归地回归和优化视差,处理了极化信息中固有的方位角和天顶角的歧义,用于迭代更新视差图与有效地融合多源的关联特征与等深度代价。在合成和真实数据集中的实验结果表明,该方法达到了SOTA水准。
背景知识
偏振光图像是指用不同的偏振角度拍摄的一组图像,它们可以反映物体表面的法向信息,有助于纹理缺乏的场景的匹配。偏振光是指光波的振动方向只沿着一个平面的光,它可以通过一个偏振片来产生或筛选,偏振片是一种只允许特定方向的偏振光通过的光学器件,它可以通过旋转来改变偏振角度。光波是一种横波,即光波的振动方向和传播方向垂直。根据横波的性质,不同偏振角度的偏振光图像的亮度会有不同的变化,这种变化与物体表面的法向量有关。偏振光图像的亮度和偏振角之间的关系可以用一个余弦函数来表示:
I ( ϕ c ) = I max cos 2 ( ϕ c − ϕ ) + I min sin 2 ( ϕ c − ϕ ) , = I ˉ + ρ I ˉ cos ( 2 ϕ c − 2 ϕ ) , (1) \begin{aligned} I\left(\phi_{c}\right)& =I_{\max}\cos^2\left(\phi_c-\phi\right)+I_{\min}\sin^2\left(\phi_c-\phi\right), \\ &=\bar{I}+\rho\bar{I}\cos\left(2\phi_c-2\phi\right), \end{aligned}\tag{1} I(ϕc)=Imaxcos2(ϕc−ϕ)+Iminsin2(ϕc−ϕ),=Iˉ+ρIˉcos(2ϕc−2ϕ),(1)
其中 ϕ c ϕ_c ϕc是偏振角, ϕ ϕ ϕ是物体表面的偏振角, ρ ρ ρ是物体表面的偏振度, I I I是物体表面的亮度, I m i n , I m a x , I ˉ = ( I m i n + I m a x ) / 2 I_{min}, I_{max}, \bar{I} = (I_{min}+I_{max})/2 Imin,Imax,Iˉ=(Imin+Imax)/2 为物体表面的最小亮度,最高亮度与平均亮度。最大亮度和最小亮度是指在不同的偏振角度下,偏振光图像的亮度的最大值和最小值。平均亮度是指最大亮度和最小亮度的平均值,反映了物体表面的总体亮度。偏振角是指使偏振光图像达到最大亮度的偏振角度,它与物体表面的法向量有关,可以用于计算物体表面的法向角。偏振度是指最大亮度和最小亮度之间的相对差异,它反映了物体表面的偏振特性,可以用于判断物体表面的反射类型。这个方程可以用于从偏振光图像中计算出物体表面的偏振角和偏振度,进而推导出物体表面的法向量.
当光线从空气射到物体表面时,会发生反射和折射,反射光会部分地偏振,即光波的振动方向只沿着一个平面。反射光的偏振程度和方向取决于物体表面的法向量和反射类型。反射类型分为漫反射和镜面反射,漫反射是指光线在物体表面的微小凹凸处发生多次反射,镜面反射是指光线在物体表面的平滑处发生一次反射。一般情况下,每个像素处的反射类型是由物体表面的材质和光照条件决定的。偏振度 ρ ρ ρ,偏振角 ϕ ϕ ϕ,天顶角 θ θ θ和方位角 φ φ φ是描述偏振光图像的几个重要参数。偏振度是指反射光的偏振程度,偏振角是指反射光的偏振方向,天顶角是指物体表面的法向量与视线方向的夹角,方位角是指物体表面的法向量在水平面上的投影与水平基准方向的夹角。根据物理原理,偏振度,偏振角,天顶角和方位角之间存在一定的关系,这些关系可以用数学方程来表示:
ρ d = ( η − 1 / η ) 2 sin 2 θ 2 + 2 η 2 − ( η + 1 / η ) 2 sin 2 θ + 4 cos θ η 2 − sin 2 θ ϕ d = φ o r ϕ d = φ + π , , (2) \begin{gathered}\rho_d=\frac{(\eta-1/\eta)^2\sin^2\theta}{\begin{aligned}2+2\eta^2-(\eta+1/\eta)^2\sin^2\theta+4\cos\theta\sqrt{\eta^2-\sin^2\theta}\\\phi_d=\varphi\mathrm{~or~}\phi_d=\varphi+\pi,\end{aligned}},\end{gathered}\tag{2} ρd=2+2η2−(η+1/η)2sin2θ+4cosθη2−sin2θϕd=φ or ϕd=φ+π,(η−1/η)2sin2θ,(2)
其中 η \eta η 为表面材料的折射率,对镜面反射,有:
ρ s = 2 sin 2 θ cos θ η 2 − sin 2 θ η 2 − sin 2 θ − η 2 sin 2 θ + 2 sin 4 θ , ϕ s = φ ± π 2 . (3) \begin{gathered}\rho_s=\frac{2\sin^2\theta\cos\theta\sqrt{\eta^2-\sin^2\theta}}{\eta^2-\sin^2\theta-\eta^2\sin^2\theta+2\sin^4\theta},\\\phi_s=\varphi\pm\frac\pi2.\end{gathered}\tag{3} ρs=η2−sin2θ−η2sin2θ+2sin4θ2sin2θcosθη2−sin2θ,ϕs=φ±2π.(3)
通过求解上述方程中的方位角和天顶角,可以估算出表面法线,而由于未知的反射类型和非线性方程,方位角和天顶角都存在多解,这也被称为方位角模糊性和天顶角模糊性。
模型架构

如图1所示,整体模型可以划分为4个步骤:(1)分别从RGB与偏振立体图像提取特征。(2)分别使用RGB与偏振立体特征构建匹配代价体。(3)根据偏振信息约束计算等深。(4)将相关性代价体与等深代价送入GRU单元中不断迭代更新视差图。
Multi Domain Feature and Correlation Volume 多源特征与相关性代价体
特征提取:分别使用特征提取模块从RGB立体图像与偏振立体图像中提取维度为256的特征图。RGB图像特征在不同的光照条件下提供了更一致的上下文信息,而偏振图像特征可能受到噪声的干扰。RGB图像在不同的光照条件下提供了更一致的上下文信息,而极化图像可能受到噪声的干扰。因此,文中选择了RGB图像特征作为上下文特征的来源,以保证上下文信息的一致性。
相关性代价体:参考RAFT构建相关代价体,在纹理缺失和特征稀疏的情况下,利用偏振信息作为RGB信息的补充,从而提高立体匹配的效果:
I C i j k = ∑ h f i j h I ⋅ g i k h I , I C ∈ R H × W × W , P C i j k = ∑ h f i j h P ⋅ g i k h P , P C ∈ R H × W × W , (4) \begin{aligned}\mathbf{IC}_{ijk}&=\sum_h\mathbf{f}_{ijh}^I\cdot\mathbf{g}_{ikh}^I,\quad\mathbf{IC}\in\mathbb{R}^{H\times W\times W},\\\mathbf{PC}_{ijk}&=\sum_h\mathbf{f}_{ijh}^P\cdot\mathbf{g}_{ikh}^P,\quad\mathbf{PC}\in\mathbb{R}^{H\times W\times W},\end{aligned}\tag{4} ICijkPCijk=h∑fijhI⋅gikhI,IC∈RH×W×W,=h∑fijhP⋅gikhP,PC∈RH×W×W,(4)
其中, I C i j k \mathbf{IC}_{ijk} ICijk 表示RGB相关代价体, P C i j k \mathbf{PC}_{ijk} PCijk 为偏振相关代价体。分别对RGB代价体与偏振代价体下采样得到4层的代价体金字塔。
Iso-Depth Cost and Ambiguity Solver 等深代价与模糊匹配
法线的等深约束:等深度轮廓与轮廓上点的法向量的方位角分量正交。通过对深度求导并用视差代替深度可以得到方位角的近似表示: tan ( φ ) = f y f x ( d 0 , − 1 − d 0 , 1 ) ( d − 1 , 0 + d 1 , 0 ) ( d − 1 , 0 − d 1 , 0 ) ( d 0 , − 1 + d 0 , 1 ) , (5) \tan(\varphi)=\frac{f_y}{f_x}\frac{(\text{d }_{0,-1}-\text{d }_{0,1})(\text{d }_{-1,0}+\text{d }_{1,0})}{(\text{d }_{-1,0}-\text{d }_{1,0})(\text{d }_{0,-1}+\text{d }_{0,1})},\tag{5} tan(φ)=fxfy(d −1,0−d 1,0)(d 0,−1+d 0,1)(d 0,−1−d 0,1)(d −1,0+d 1,0),(5)
其中 d i , j d_{i,j} di,j 为像素点 P ( u , v ) P(u,v) P(u,v)的邻域像素 P ( u + i , v + j ) P(u+i,v+j) P(u+i,v+j), f f f为焦距。
等深偏振代价:如上文所述,文中构建了一个统一的等深度代价,来显式地利用偏振的几何约束,并处理方位角φ和线偏振角 ϕ ϕ ϕ之间的 π − π- π−歧义和 π / 2 − π/2- π/2−歧义。文中提出的等深度代价 C ( φ ) C(φ) C(φ)通过最小化算子将镜面反射和漫反射下的方位角代价进行了整合。此外,反射类型的歧义 R ( φ ) R(φ) R(φ)可以由以下方式解决:
C s ( φ ) = [ s i n ( ϕ ) s i n ( φ ) + c o s ( ϕ ) c o s ( φ ) ] 2 , C d ( φ ) = [ s i n ( ϕ ) c o s ( φ ) − c o s ( ϕ ) s i n ( φ ) ] 2 , C ( φ ) = min { C s ( φ ) , C d ( φ ) } , R ( φ ) = arg min { C s ( φ ) , C d ( φ ) } , (6) \begin{aligned} &\mathbf{C}_{s}(\varphi)=\left[sin\left(\phi\right)sin\left(\varphi\right)+cos\left(\phi\right)cos\left(\varphi\right)\right]^{2}, \\ &\begin{aligned}\mathbf{C}_d(\varphi)=\left[sin\left(\phi\right)cos\left(\varphi\right)-cos\left(\phi\right)sin\left(\varphi\right)\right]^2,\end{aligned} \\ &\mathbf{C}(\varphi)=\min\left\{\mathbf{C}_s(\varphi),\mathbf{C}_d(\varphi)\right\}, \\ &\begin{aligned}\mathbf{R}(\varphi)=\arg\min\left\{\mathbf{C}_s(\varphi),\mathbf{C}_d(\varphi)\right\},\end{aligned} \end{aligned}\tag{6} Cs(φ)=[sin(ϕ)sin(φ)+cos(ϕ)cos(φ)]2,Cd(φ)=[sin(ϕ)cos(φ)−cos(ϕ)sin(φ)]2,C(φ)=min{Cs(φ),Cd(φ)},R(φ)=argmin{Cs(φ),Cd(φ)},(6)
其中, C d C_d Cd和 C s C_s Cs分别表示漫反射和镜面反射的代价。
虚拟视差和虚拟相关特征:为了抑制偏振噪声引起的代价扰动,并充分利用偏振提供的等深度约束,文中根据等深度代价计算虚拟视差,并生成相应的虚拟相关特征。虚拟视差和虚拟相关特征可以用于优化GRU中的视差细化,优化GRU是双GRU架构的一部分。为了区分不同的视差,文中将在更新块中不断更新的视差称为实际视差 d a d_a da,把根据等深度代价的梯度和迭代更新的步长 α α α计算的视差称为虚拟视差 d v d_v dv。虚拟视差的计算公式如下:
d v = d a − α ∇ d C ( φ , d ) . (7) d_v=d_a-\alpha\nabla_d\mathbf{C}(\varphi,d).\tag{7} dv=da−α∇dC(φ,d).(7)
Hybrid GRU-based Update Operator 混合GRU更新单元
文中使用混合GRU单元来挖掘多源信息并更新视差图。如图2所示:

多源上下文信息与集合信息被送入到更新块中融合,并基于两个关联代价体金字塔提取多源相似性视觉特征 。最后,将真实与虚拟视觉相关特征送入双GRU单元循环优化视差结果。此外,虚拟视差和相关的虚拟相关特征是根据等深度代价生成的,用于间接地指导优化过程。
级联双GRU结构:文中作者提出级联的双GRU结构用于融合等深代价与视觉相似性。级联的双GRU架构由一个回归GRU和一个优化GRU组成。在回归GRU中,视差由实际视差的多域相关特征回归计算得到,这些特征利用了RGB和偏振图像的相似性,为后续的优化提供了一个初始预测。在优化GRU中,等深度代价直接作为输入并通过虚拟相关特征以一种间接的方式融入。优化GRU融合了几何约束,并进一步纠正了视差。
文中基于虚拟相关特征来引入等深度代价,而不是直接用代价梯度计算的增量来更新视差,这样可以避免传统优化过程中的以下困难:(1)将与上下文信息耦合的匹配问题显式地转化为优化问题。(2)由于优化问题的严重非凸性带来的优化难问题。考虑到以上的难点,文中引入一个混合优化GRU避免模型在局部收敛与抑制偏振噪声的影响。此外,级联方案可以很好地平衡视觉相似性和几何约束。通过回归和优化的级联范式,在不同的迭代中逐渐细化视差。
多源输入:基于多域信息来构造GRU的输入。级联的双GRU架构中的两个GRU的输入不同。回归GRU的输入是实际视差的多域相关特征,利用了RGB和偏振图像的相似性,为后续的优化提供了一个初始预测。优化GRU的输入是虚拟视差的多域相关特征,利用了偏振图像中的等深度代价来指导视差优化。在将多域相关特征输入到GRU之前,使用两层卷积组成的编码器分别对多域输入进行处理。最后,将多域相关特征和其他编码特征拼接后输入GRU单元,如图2所示。
更新:GRU更新单元用来循环地更新视差和代价步长。该模块包括两个GRU(门控循环单元),分别是回归GRU和优化GRU。回归GRU和优化GRU都有一个隐藏状态,隐藏状态会根据编码后的混合输入不断地更新。通过不同的头网络,可以从隐藏状态中解码出视差增量和优化步长。最后基于新的增量来更新视差,并通过上采样操作来恢复全分辨率的视差图。
损失函数
L = ∑ i = 1 N γ N − i ∥ d g t − d i ∥ 1 . (8) \mathbf{L}=\sum_{i=1}^N\gamma^{N-i}\left\|d_{gt}-d_i\right\|_1.\tag{8} L=i=1∑NγN−i∥dgt−di∥1.(8)
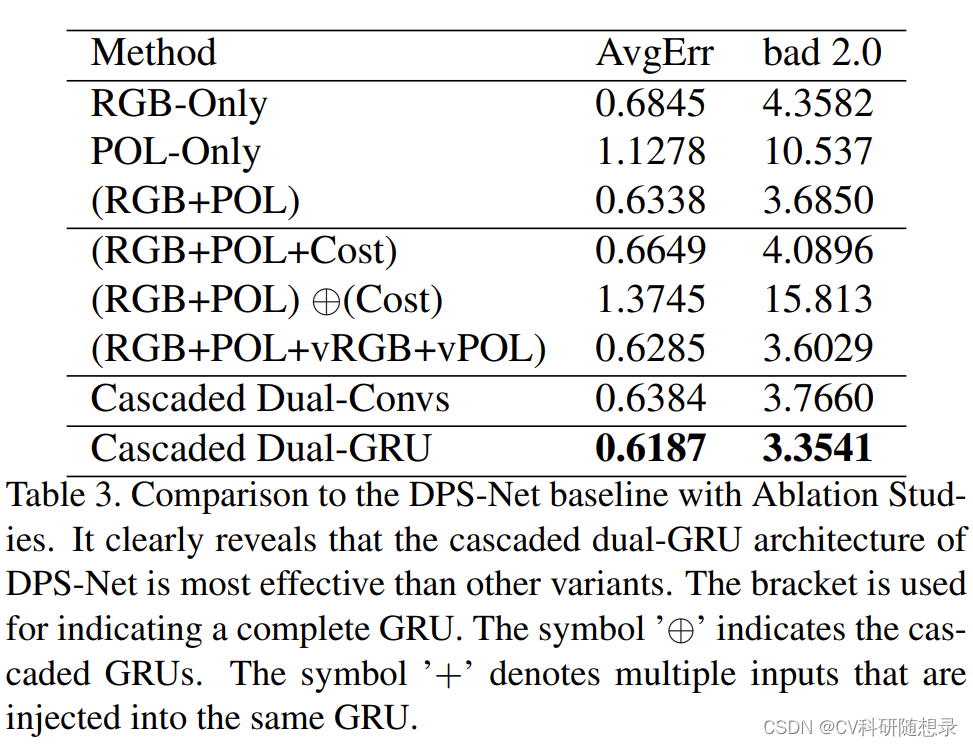
实验结果






相关文章:
论文阅读《DPS-Net: Deep Polarimetric Stereo Depth Estimation》
论文地址:https://openaccess.thecvf.com/content/ICCV2023/html/Tian_DPS-Net_Deep_Polarimetric_Stereo_Depth_Estimation_ICCV_2023_paper.html 概述 立体匹配模型难以处理无纹理场景的匹配,现有的方法通常假设物体表面是光滑的,或者光照是…...
docker文档转译1
写在最前面 本文主要是转译docker官方文档。主题是Docker overview,这里是链接 Docker概述 Docker是一个用于开发、发布和运行应用程序的开放平台。Docker使你能够将应用程序与基础设施分离,从而可以快速交付软件。你可以使用相同的方法像管理应用程序…...
UE4 图片环形轮播 蓝图
【需求】 图片环形轮播 任意图片之间相互切换 切换图片所需时间均为1s 两个图片之间切换使用就近原则 播放丝滑无闪跳 【Actor的组成】 每个图片的轴心都在原点 【蓝图节点】...

饥荒Mod 开发(十):制作一把AOE武器
饥荒Mod 开发(九):物品栏排列 饥荒Mod 开发(十一):修改物品堆叠 前面的文章介绍了很多基础知识以及如何制作一个物品,这次制作一把武器,装备之后可以用来攻击怪物。 制作武器贴图和动画 1.1 制作贴图。 先准备一张武器的贴图&a…...
微服务实战系列之ZooKeeper(下)
前言 通过前序两篇关于ZooKeeper的介绍和总结,我们可以大致理解了它是什么,它有哪些重要组成部分。 今天,博主特别介绍一下ZooKeeper的一个核心应用场景:分布式锁。 应用ZooKeeper Q:什么是分布式锁 首先了解一下&…...

FFmpeg项目的组成
主要由三个部分组成: 工具 ffmpeg:用于音视频转码、转换ffplay:音视频播放器ffserver:流媒体服务器ffprobe:多媒体码流分析器 SDK 这个部分是供开发者使用的SDK,SDK是编译好的库。基本上每个平台都有对…...
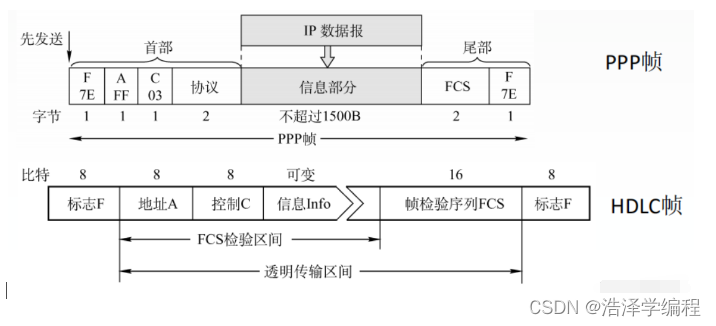
计算机网络:数据链路层(广域网、PPP协议、HDLC协议)
今天又学会了一个知识,加油! 目录 一、广域网 二、PPP协议 1、PPP协议应满足的要求 2、PPP协议无需满足的要求 3、PPP协议的三个组成部分 4、PPP协议的状态图 5、PPP协议的帧格式 三、HDLC协议 1、HDLC的站(主站、从站、复合站&…...

Spring Boot i18n中文文档
本文为官方文档直译版本。原文链接 Spring Boot 支持本地化消息,因此您的应用程序可以满足不同语言偏好的用户。默认情况下,Spring Boot 会在类路径的根目录下查找是否存在消息资源包。 自动配置适用于已配置资源包的默认属性文件(默认为 mes…...

持久化存储 StorageClass
kubernetes从v1.4版本开始引入了一个新的资源对象StorageClass,用于标记存储资源的特性和性能。到v1.6版本时,StorageClass和动态资源供应的机制得到了完善,实现了存储卷的按需创建,在共享存储的自动化管理进程中能够实现了重要的…...

uni-app点击预览图片
<image :src"info.shopLogoUrl" tap"_previewImage(info.shopLogoUrl)" mode"widthFix" >_previewImage(image) {var imgArr [];imgArr.push(image);//预览图片uni.previewImage({urls: imgArr,current: imgArr[0]});},大佬地址...
【C++】POCO学习总结(十八):XML
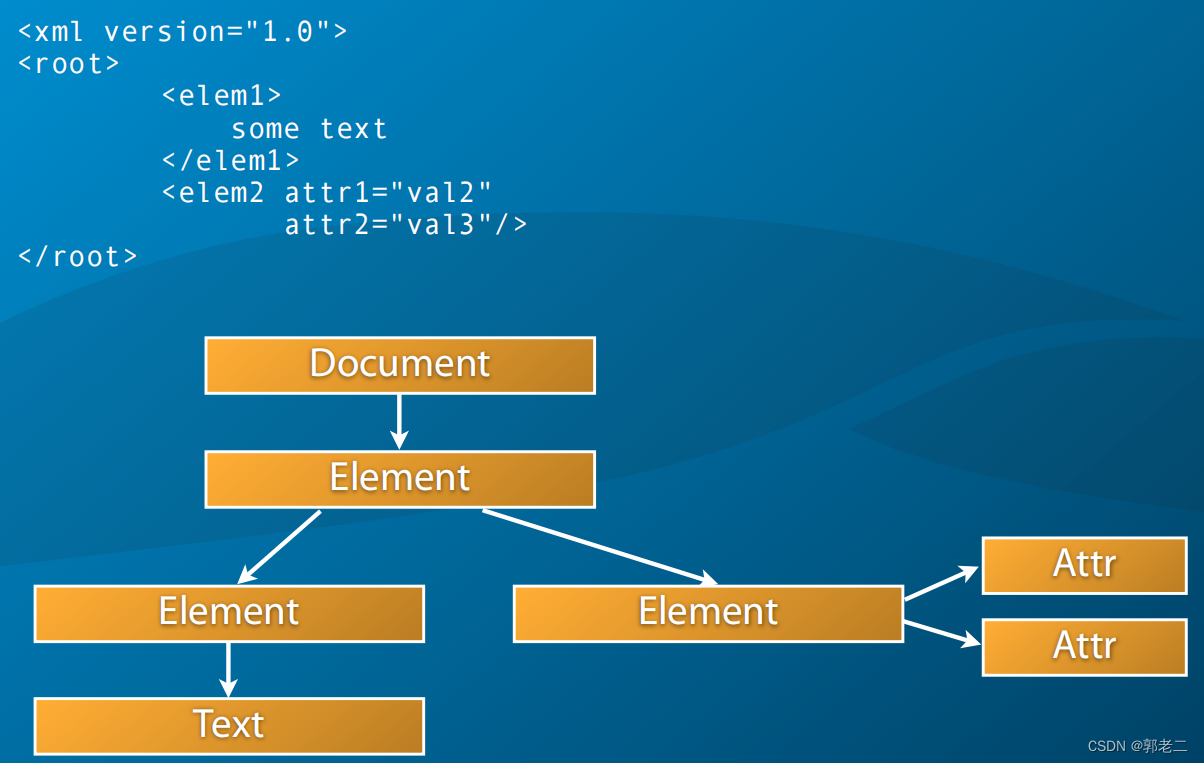
【C】郭老二博文之:C目录 1、XML文件格式简介 1)XML文件的开头一般都有个声明,声明是可选 <?xml version"1.0" encoding"UTF-8"?>2)根元素:XML文件最外层的元素 3ÿ…...
京东体育用品销售数据分析与可视化系统
京东体育用品销售数据分析与可视化系统 前言数据爬取模块1. 数据爬取2. 数据处理3. 数据存储 数据可视化模块1. 数据查看2. 店铺商品数量排行3. 整体好评率4. 不同品牌市场占比5. 品牌差评率排名6. 品牌价格排名7. 品牌评论数量分布 创新点 前言 在体育用品行业,了…...

【STM32】STM32学习笔记-EXTI外部中断(11)
00. 目录 文章目录 00. 目录01. 中断系统02. 中断执行流程03. STM32中断04. NVIC基本结构05. NVIC优先级分组06. EXTI简介07. EXTI基本结构08. AFIO复用IO口09. EXTI框图10. 计数器模块11. 旋转编码器简介12. 附录 01. 中断系统 中断:在主程序运行过程中࿰…...

CSS BFC详解
概念 BFC(Block Formatting Context)是CSS中的一个概念,用于描述一个独立的渲染区域,其中的元素按照一定规则进行布局和渲染。 BFC具有以下特性和作用 清除浮动:当一个元素的float属性设置为left或right时ÿ…...
【C语言】实战项目——通讯录
引言 学会创建一个通讯录,对过往知识进行加深和巩固。 文章很长,要耐心学完哦! ✨ 猪巴戒:个人主页✨ 所属专栏:《C语言进阶》 🎈跟着猪巴戒,一起学习C语言🎈 目录 引言 实战 建…...

05 Rust 结构体
结构体 Rust 中的结构体(Struct)与元组(Tuple)都可以将若干个类型不一定相同的数据捆绑在一起形成整体,但结构体的每个成员和其本身都有一个名字,这样访问它成员的时候就不用记住下标了。 元组常用于非定…...
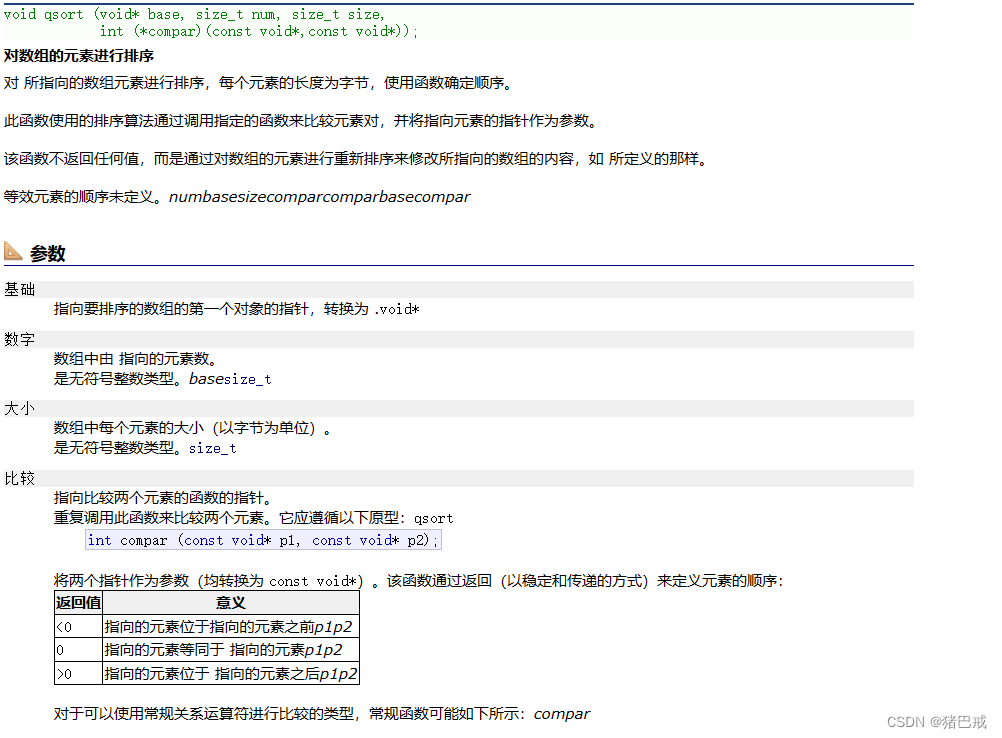
C语言预处理详解及其指令
预处理详解 1.预定义符号2.#define定义常量基本使用方法举例子如果在define定义的表示符后面加上分号会发生什么?用一下来解释 3. #define定义宏举例例1例2 4. 带有副作用的宏参数例如: 5. 宏替换的规则6. 宏函数的对比宏和函数的一个对比 7. #和##7.1 #运算符7.2 #…...

【数据结构—队列的实现】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言 一、队列 1.1队列的概念及结构 二、队列的实现 2.1头文件的实现—Queue.h 2.2源文件的实现—Queue.c 2.3源文件的测试—test.c 三、测试队列实际数据的展示 3.…...
ASP.NET MVC实战之权限拦截Authorize使用
1,具体的实现方法代码如下 public class CustomAuthorizeAttribute : FilterAttribute, IAuthorizationFilter{/// <summary>/// 如果需要验证权限的时候,就执行进来/// </summary>/// <param name"filterContext"></par…...

java8实战 lambda表达式和函数式接口(上)
前言: 本博客对java8实战第三章的总结,也是上一篇博客行为化参数的延续,介绍一下函数式接口 Lambda表达式 lambda的表达式的结构由:参数,箭头,主体构成。 lambda示例 函数式接口: 先看上一篇…...

Vim 调用外部命令学习笔记
Vim 外部命令集成完全指南 文章目录 Vim 外部命令集成完全指南核心概念理解命令语法解析语法对比 常用外部命令详解文本排序与去重文本筛选与搜索高级 grep 搜索技巧文本替换与编辑字符处理高级文本处理编程语言处理其他实用命令 范围操作示例指定行范围处理复合命令示例 实用技…...

day52 ResNet18 CBAM
在深度学习的旅程中,我们不断探索如何提升模型的性能。今天,我将分享我在 ResNet18 模型中插入 CBAM(Convolutional Block Attention Module)模块,并采用分阶段微调策略的实践过程。通过这个过程,我不仅提升…...
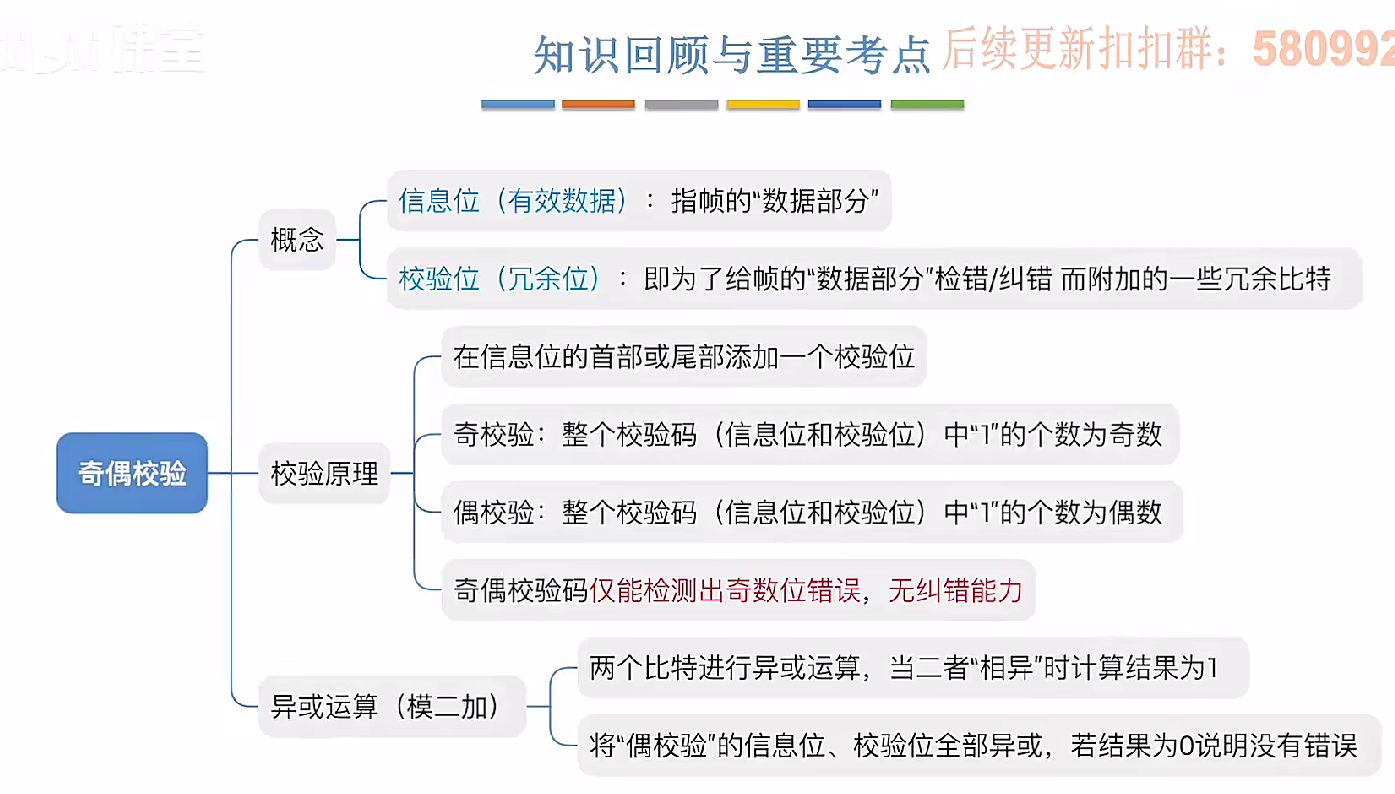
3.3.1_1 检错编码(奇偶校验码)
从这节课开始,我们会探讨数据链路层的差错控制功能,差错控制功能的主要目标是要发现并且解决一个帧内部的位错误,我们需要使用特殊的编码技术去发现帧内部的位错误,当我们发现位错误之后,通常来说有两种解决方案。第一…...

为什么需要建设工程项目管理?工程项目管理有哪些亮点功能?
在建筑行业,项目管理的重要性不言而喻。随着工程规模的扩大、技术复杂度的提升,传统的管理模式已经难以满足现代工程的需求。过去,许多企业依赖手工记录、口头沟通和分散的信息管理,导致效率低下、成本失控、风险频发。例如&#…...

《用户共鸣指数(E)驱动品牌大模型种草:如何抢占大模型搜索结果情感高地》
在注意力分散、内容高度同质化的时代,情感连接已成为品牌破圈的关键通道。我们在服务大量品牌客户的过程中发现,消费者对内容的“有感”程度,正日益成为影响品牌传播效率与转化率的核心变量。在生成式AI驱动的内容生成与推荐环境中࿰…...
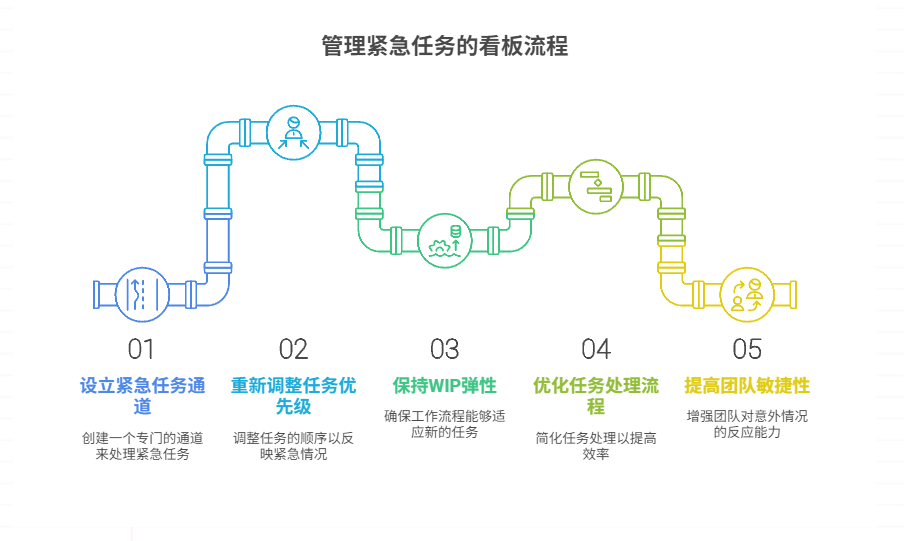
如何在看板中有效管理突发紧急任务
在看板中有效管理突发紧急任务需要:设立专门的紧急任务通道、重新调整任务优先级、保持适度的WIP(Work-in-Progress)弹性、优化任务处理流程、提高团队应对突发情况的敏捷性。其中,设立专门的紧急任务通道尤为重要,这能…...
屋顶变身“发电站” ,中天合创屋面分布式光伏发电项目顺利并网!
5月28日,中天合创屋面分布式光伏发电项目顺利并网发电,该项目位于内蒙古自治区鄂尔多斯市乌审旗,项目利用中天合创聚乙烯、聚丙烯仓库屋面作为场地建设光伏电站,总装机容量为9.96MWp。 项目投运后,每年可节约标煤3670…...
)
是否存在路径(FIFOBB算法)
题目描述 一个具有 n 个顶点e条边的无向图,该图顶点的编号依次为0到n-1且不存在顶点与自身相连的边。请使用FIFOBB算法编写程序,确定是否存在从顶点 source到顶点 destination的路径。 输入 第一行两个整数,分别表示n 和 e 的值(1…...
如何在网页里填写 PDF 表格?
有时候,你可能希望用户能在你的网站上填写 PDF 表单。然而,这件事并不简单,因为 PDF 并不是一种原生的网页格式。虽然浏览器可以显示 PDF 文件,但原生并不支持编辑或填写它们。更糟的是,如果你想收集表单数据ÿ…...
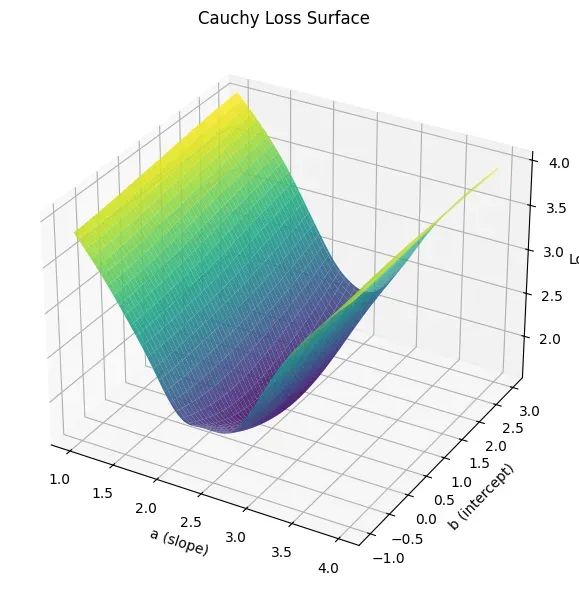
让回归模型不再被异常值“带跑偏“,MSE和Cauchy损失函数在噪声数据环境下的实战对比
在机器学习的回归分析中,损失函数的选择对模型性能具有决定性影响。均方误差(MSE)作为经典的损失函数,在处理干净数据时表现优异,但在面对包含异常值的噪声数据时,其对大误差的二次惩罚机制往往导致模型参数…...