YOLOv8改进 | 2023注意力篇 | HAttention(HAT)超分辨率重建助力小目标检测 (全网首发)
一、本文介绍
本文给大家带来的改进机制是HAttention注意力机制,混合注意力变换器(HAT)的设计理念是通过融合通道注意力和自注意力机制来提升单图像超分辨率重建的性能。通道注意力关注于识别哪些通道更重要,而自注意力则关注于图像内部各个位置之间的关系。HAT利用这两种注意力机制,有效地整合了全局的像素信息,从而提供更为精确的结果(这个注意力机制挺复杂的光代码就700+行),但是效果挺好的也是10月份最新的成果非常适合添加到大家自己的论文中。
推荐指数:⭐⭐⭐⭐⭐(最新的改进机制)
专栏回顾:YOLOv8改进系列专栏——本专栏持续复习各种顶会内容——科研必备
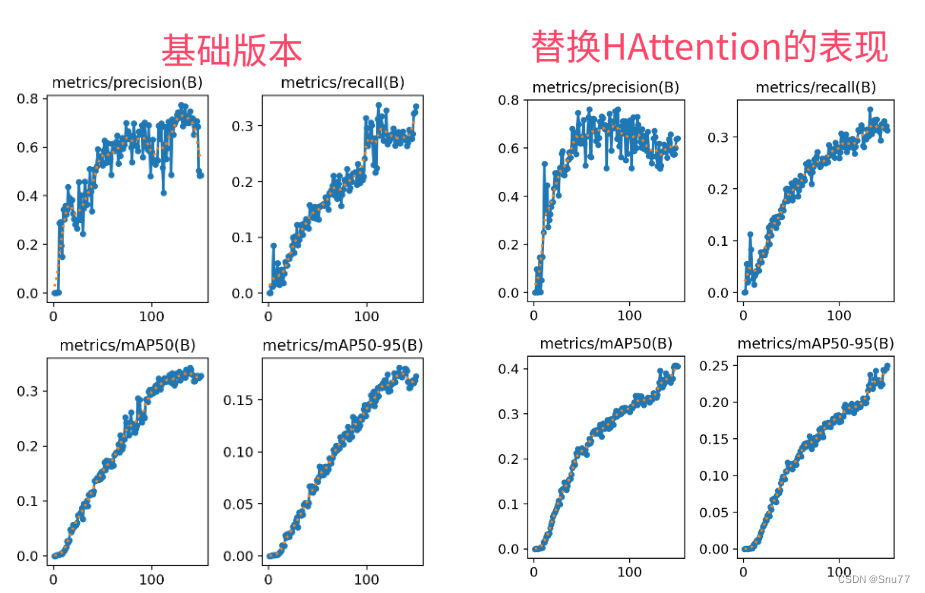
效果回顾展示->
目录
一、本文介绍
二、HAttention框架原理
2.1 混合注意力变换器(HAT)的引入
三、HAttention的核心代码
四、手把手教你添加HAttention机制
修改一
修改二
五、HAttention的yaml文件
5.1 HAttention的yaml文件一
5.2 HAttention的yaml文件二
5.3 推荐HAttention可添加的位置
5.4 HAttention的训练过程截图
五、本文总结
二、HAttention框架原理
 官方论文地址:官方论文地址
官方论文地址:官方论文地址
官方代码地址:官方代码地址
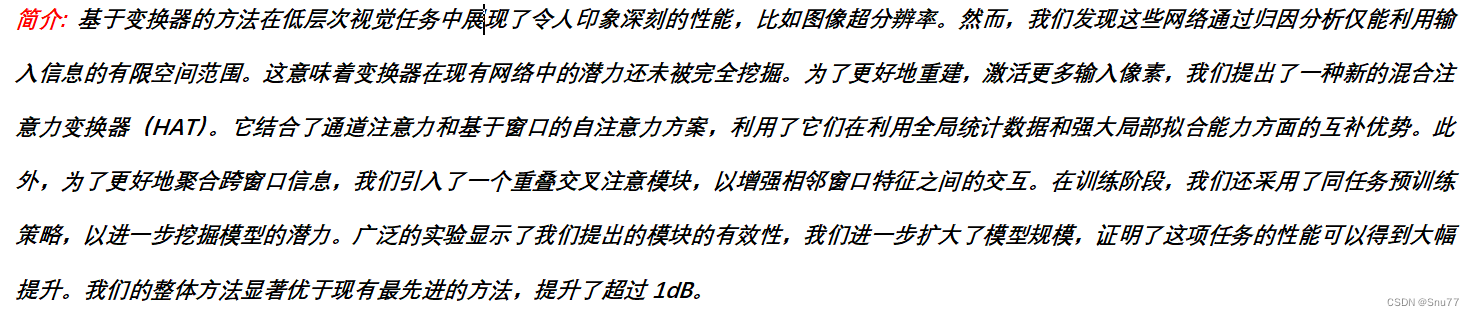
这篇论文提出了一种新的混合注意力变换器(Hybrid Attention Transformer, HAT)用于单图像超分辨率重建。HAT结合了通道注意力和自注意力,以激活更多像素以进行高分辨率重建。此外,作者还提出了一个重叠交叉注意模块来增强跨窗口信息的交互。论文还引入了一种同任务预训练策略,以进一步发掘HAT的潜力。通过广泛的实验,论文展示了所提出模块和预训练策略的有效性,其方法在定量和定性方面显著优于现有的最先进方法。
这篇论文的创新点主要包括:
1. 混合注意力变换器(HAT)的引入:它结合了通道注意力和自注意力机制,以改善单图像超分辨率重建。
2.重叠交叉注意模块:这一模块用于增强跨窗口信息的交互,以进一步提升超分辨率重建的性能。
3.同任务预训练策略:作者提出了一种新的预训练方法,专门针对HAT,以充分利用其潜力。
这些创新点使得所提出的方法在超分辨率重建方面的性能显著优于现有技术。
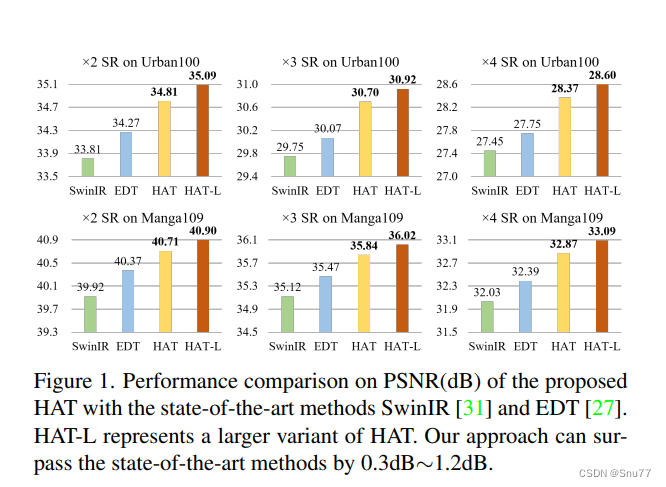
这个图表展示了所提出的混合注意力变换器(HAT)在不同放大倍数(x2, x3, x4)和不同数据集(Urban100和Manga109)上的性能对比。HAT模型与其他最先进模型,如SwinIR和EDT进行了比较。图表显示,HAT在PSNR(峰值信噪比)度量上,比SwinIR和EDT有显著提升。特别是在Urban100数据集上,HAT的改进幅度介于0.3dB到1.2dB之间。HAT-L是HAT的一个更大的变体,它在所有测试中都表现得非常好,进一步证明了HAT模型的有效性。
 这幅图描绘了混合注意力变换器(HAT)的整体架构及其关键组成部分的结构。HAT包括浅层特征提取,深层特征提取,以及图像重建三个主要步骤。在深层特征提取部分,有多个残差混合注意力组(RHAG),每个组内包含多个混合注意力块(HAB)和一个重叠交叉注意块(OCAB)。HAB利用通道注意力块(CAB)和窗口式多头自注意力(W-MSA),在提取特征时考虑了通道之间和空间位置之间的相关性。OCAB进一步增强了不同窗口间特征的交互。最后,经过多个RHAG处理的特征通过图像重建部分,恢复成高分辨率的图像(这个在代码中均有体现,这个注意力机制代码巨长,700多行)。
这幅图描绘了混合注意力变换器(HAT)的整体架构及其关键组成部分的结构。HAT包括浅层特征提取,深层特征提取,以及图像重建三个主要步骤。在深层特征提取部分,有多个残差混合注意力组(RHAG),每个组内包含多个混合注意力块(HAB)和一个重叠交叉注意块(OCAB)。HAB利用通道注意力块(CAB)和窗口式多头自注意力(W-MSA),在提取特征时考虑了通道之间和空间位置之间的相关性。OCAB进一步增强了不同窗口间特征的交互。最后,经过多个RHAG处理的特征通过图像重建部分,恢复成高分辨率的图像(这个在代码中均有体现,这个注意力机制代码巨长,700多行)。
2.1 混合注意力变换器(HAT)
混合注意力变换器(HAT)的设计理念是通过融合通道注意力和自注意力机制来提升单图像超分辨率重建的性能。通道注意力关注于识别哪些通道更重要,而自注意力则关注于图像内部各个位置之间的关系。HAT利用这两种注意力机制,有效地整合了全局的像素信息,从而提供更为精确的上采样结果。这种结合使得HAT能够更好地重建高频细节,提高重建图像的质量和精度。
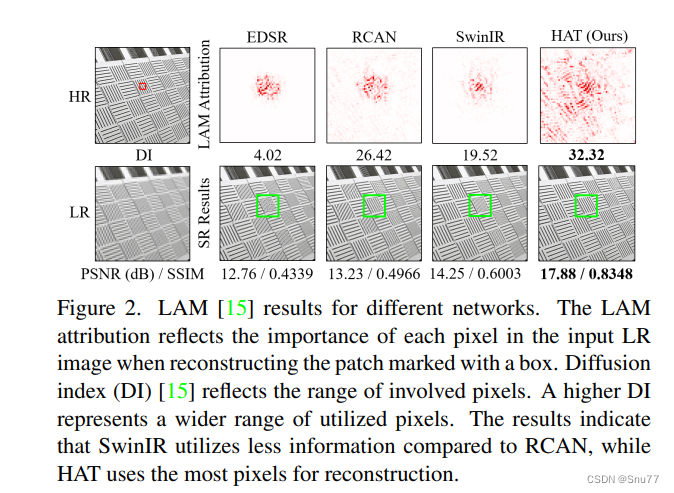 这幅图表展示了不同超分辨率网络的局部归因图(LAM)结果,以及对应的性能指标。LAM展示了在重建高分辨率(HR)图像中标记框内区域时,输入的低分辨率(LR)图像中每个像素的重要性。扩散指数(DI)表示参与的像素范围,数值越高表示使用的像素越多。结果表明,HAT(作者的模型)在重建时使用了最多的像素,相比于EDSR、RCAN和SwinIR,HAT显示了最强的像素利用和最高的PSNR/SSIM性能指标。这表明HAT在精细化重建细节方面具有优势。
这幅图表展示了不同超分辨率网络的局部归因图(LAM)结果,以及对应的性能指标。LAM展示了在重建高分辨率(HR)图像中标记框内区域时,输入的低分辨率(LR)图像中每个像素的重要性。扩散指数(DI)表示参与的像素范围,数值越高表示使用的像素越多。结果表明,HAT(作者的模型)在重建时使用了最多的像素,相比于EDSR、RCAN和SwinIR,HAT显示了最强的像素利用和最高的PSNR/SSIM性能指标。这表明HAT在精细化重建细节方面具有优势。
三、HAttention的核心代码
将下面的代码复制粘贴到'ultralytics/nn/modules'的目录下,创建一个py文件粘贴进去,我这里起名字的DAttention.py,其它使用方式看章节四。
import math
import torch
import torch.nn as nn
from basicsr.utils.registry import ARCH_REGISTRY
from basicsr.archs.arch_util import to_2tuple, trunc_normal_
from einops import rearrangedef drop_path(x, drop_prob: float = 0., training: bool = False):"""Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).From: https://github.com/rwightman/pytorch-image-models/blob/master/timm/models/layers/drop.py"""if drop_prob == 0. or not training:return xkeep_prob = 1 - drop_probshape = (x.shape[0], ) + (1, ) * (x.ndim - 1) # work with diff dim tensors, not just 2D ConvNetsrandom_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)random_tensor.floor_() # binarizeoutput = x.div(keep_prob) * random_tensorreturn outputclass DropPath(nn.Module):"""Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).From: https://github.com/rwightman/pytorch-image-models/blob/master/timm/models/layers/drop.py"""def __init__(self, drop_prob=None):super(DropPath, self).__init__()self.drop_prob = drop_probdef forward(self, x):return drop_path(x, self.drop_prob, self.training)class ChannelAttention(nn.Module):"""Channel attention used in RCAN.Args:num_feat (int): Channel number of intermediate features.squeeze_factor (int): Channel squeeze factor. Default: 16."""def __init__(self, num_feat, squeeze_factor=16):super(ChannelAttention, self).__init__()self.attention = nn.Sequential(nn.AdaptiveAvgPool2d(1),nn.Conv2d(num_feat, num_feat // squeeze_factor, 1, padding=0),nn.ReLU(inplace=True),nn.Conv2d(num_feat // squeeze_factor, num_feat, 1, padding=0),nn.Sigmoid())def forward(self, x):y = self.attention(x)return x * yclass CAB(nn.Module):def __init__(self, num_feat, compress_ratio=3, squeeze_factor=30):super(CAB, self).__init__()self.cab = nn.Sequential(nn.Conv2d(num_feat, num_feat // compress_ratio, 3, 1, 1),nn.GELU(),nn.Conv2d(num_feat // compress_ratio, num_feat, 3, 1, 1),ChannelAttention(num_feat, squeeze_factor))def forward(self, x):return self.cab(x)class Mlp(nn.Module):def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):super().__init__()out_features = out_features or in_featureshidden_features = hidden_features or in_featuresself.fc1 = nn.Linear(in_features, hidden_features)self.act = act_layer()self.fc2 = nn.Linear(hidden_features, out_features)self.drop = nn.Dropout(drop)def forward(self, x):x = self.fc1(x)x = self.act(x)x = self.drop(x)x = self.fc2(x)x = self.drop(x)return xdef window_partition(x, window_size):"""Args:x: (b, h, w, c)window_size (int): window sizeReturns:windows: (num_windows*b, window_size, window_size, c)"""b, h, w, c = x.shapex = x.view(b, h // window_size, window_size, w // window_size, window_size, c)windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, c)return windowsdef window_reverse(windows, window_size, h, w):"""Args:windows: (num_windows*b, window_size, window_size, c)window_size (int): Window sizeh (int): Height of imagew (int): Width of imageReturns:x: (b, h, w, c)"""b = int(windows.shape[0] / (h * w / window_size / window_size))x = windows.view(b, h // window_size, w // window_size, window_size, window_size, -1)x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(b, h, w, -1)return xclass WindowAttention(nn.Module):r""" Window based multi-head self attention (W-MSA) module with relative position bias.It supports both of shifted and non-shifted window.Args:dim (int): Number of input channels.window_size (tuple[int]): The height and width of the window.num_heads (int): Number of attention heads.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if setattn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0proj_drop (float, optional): Dropout ratio of output. Default: 0.0"""def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):super().__init__()self.dim = dimself.window_size = window_size # Wh, Wwself.num_heads = num_headshead_dim = dim // num_headsself.scale = qk_scale or head_dim**-0.5# define a parameter table of relative position biasself.relative_position_bias_table = nn.Parameter(torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nHself.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)self.attn_drop = nn.Dropout(attn_drop)self.proj = nn.Linear(dim, dim)self.proj_drop = nn.Dropout(proj_drop)trunc_normal_(self.relative_position_bias_table, std=.02)self.softmax = nn.Softmax(dim=-1)def forward(self, x, rpi, mask=None):"""Args:x: input features with shape of (num_windows*b, n, c)mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None"""b_, n, c = x.shapeqkv = self.qkv(x).reshape(b_, n, 3, self.num_heads, c // self.num_heads).permute(2, 0, 3, 1, 4)q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)q = q * self.scaleattn = (q @ k.transpose(-2, -1))relative_position_bias = self.relative_position_bias_table[rpi.view(-1)].view(self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nHrelative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Wwattn = attn + relative_position_bias.unsqueeze(0)if mask is not None:nw = mask.shape[0]attn = attn.view(b_ // nw, nw, self.num_heads, n, n) + mask.unsqueeze(1).unsqueeze(0)attn = attn.view(-1, self.num_heads, n, n)attn = self.softmax(attn)else:attn = self.softmax(attn)attn = self.attn_drop(attn)x = (attn @ v).transpose(1, 2).reshape(b_, n, c)x = self.proj(x)x = self.proj_drop(x)return xclass HAB(nn.Module):r""" Hybrid Attention Block.Args:dim (int): Number of input channels.input_resolution (tuple[int]): Input resolution.num_heads (int): Number of attention heads.window_size (int): Window size.shift_size (int): Shift size for SW-MSA.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.drop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float, optional): Stochastic depth rate. Default: 0.0act_layer (nn.Module, optional): Activation layer. Default: nn.GELUnorm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm"""def __init__(self,dim,input_resolution,num_heads,window_size=7,shift_size=0,compress_ratio=3,squeeze_factor=30,conv_scale=0.01,mlp_ratio=4.,qkv_bias=True,qk_scale=None,drop=0.,attn_drop=0.,drop_path=0.,act_layer=nn.GELU,norm_layer=nn.LayerNorm):super().__init__()self.dim = dimself.input_resolution = input_resolutionself.num_heads = num_headsself.window_size = window_sizeself.shift_size = shift_sizeself.mlp_ratio = mlp_ratioif min(self.input_resolution) <= self.window_size:# if window size is larger than input resolution, we don't partition windowsself.shift_size = 0self.window_size = min(self.input_resolution)assert 0 <= self.shift_size < self.window_size, 'shift_size must in 0-window_size'self.norm1 = norm_layer(dim)self.attn = WindowAttention(dim,window_size=to_2tuple(self.window_size),num_heads=num_heads,qkv_bias=qkv_bias,qk_scale=qk_scale,attn_drop=attn_drop,proj_drop=drop)self.conv_scale = conv_scaleself.conv_block = CAB(num_feat=dim, compress_ratio=compress_ratio, squeeze_factor=squeeze_factor)self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()self.norm2 = norm_layer(dim)mlp_hidden_dim = int(dim * mlp_ratio)self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)def forward(self, x, x_size, rpi_sa, attn_mask):h, w = x_sizeb, _, c = x.shape# assert seq_len == h * w, "input feature has wrong size"shortcut = xx = self.norm1(x)x = x.view(b, h, w, c)# Conv_Xconv_x = self.conv_block(x.permute(0, 3, 1, 2))conv_x = conv_x.permute(0, 2, 3, 1).contiguous().view(b, h * w, c)# cyclic shiftif self.shift_size > 0:shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))attn_mask = attn_maskelse:shifted_x = xattn_mask = None# partition windowsx_windows = window_partition(shifted_x, self.window_size) # nw*b, window_size, window_size, cx_windows = x_windows.view(-1, self.window_size * self.window_size, c) # nw*b, window_size*window_size, c# W-MSA/SW-MSA (to be compatible for testing on images whose shapes are the multiple of window sizeattn_windows = self.attn(x_windows, rpi=rpi_sa, mask=attn_mask)# merge windowsattn_windows = attn_windows.view(-1, self.window_size, self.window_size, c)shifted_x = window_reverse(attn_windows, self.window_size, h, w) # b h' w' c# reverse cyclic shiftif self.shift_size > 0:attn_x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))else:attn_x = shifted_xattn_x = attn_x.view(b, h * w, c)# FFNx = shortcut + self.drop_path(attn_x) + conv_x * self.conv_scalex = x + self.drop_path(self.mlp(self.norm2(x)))return xclass PatchMerging(nn.Module):r""" Patch Merging Layer.Args:input_resolution (tuple[int]): Resolution of input feature.dim (int): Number of input channels.norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm"""def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):super().__init__()self.input_resolution = input_resolutionself.dim = dimself.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)self.norm = norm_layer(4 * dim)def forward(self, x):"""x: b, h*w, c"""h, w = self.input_resolutionb, seq_len, c = x.shapeassert seq_len == h * w, 'input feature has wrong size'assert h % 2 == 0 and w % 2 == 0, f'x size ({h}*{w}) are not even.'x = x.view(b, h, w, c)x0 = x[:, 0::2, 0::2, :] # b h/2 w/2 cx1 = x[:, 1::2, 0::2, :] # b h/2 w/2 cx2 = x[:, 0::2, 1::2, :] # b h/2 w/2 cx3 = x[:, 1::2, 1::2, :] # b h/2 w/2 cx = torch.cat([x0, x1, x2, x3], -1) # b h/2 w/2 4*cx = x.view(b, -1, 4 * c) # b h/2*w/2 4*cx = self.norm(x)x = self.reduction(x)return xclass OCAB(nn.Module):# overlapping cross-attention blockdef __init__(self, dim,input_resolution,window_size,overlap_ratio,num_heads,qkv_bias=True,qk_scale=None,mlp_ratio=2,norm_layer=nn.LayerNorm):super().__init__()self.dim = dimself.input_resolution = input_resolutionself.window_size = window_sizeself.num_heads = num_headshead_dim = dim // num_headsself.scale = qk_scale or head_dim**-0.5self.overlap_win_size = int(window_size * overlap_ratio) + window_sizeself.norm1 = norm_layer(dim)self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)self.unfold = nn.Unfold(kernel_size=(self.overlap_win_size, self.overlap_win_size), stride=window_size, padding=(self.overlap_win_size-window_size)//2)# define a parameter table of relative position biasself.relative_position_bias_table = nn.Parameter(torch.zeros((window_size + self.overlap_win_size - 1) * (window_size + self.overlap_win_size - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nHtrunc_normal_(self.relative_position_bias_table, std=.02)self.softmax = nn.Softmax(dim=-1)self.proj = nn.Linear(dim,dim)self.norm2 = norm_layer(dim)mlp_hidden_dim = int(dim * mlp_ratio)self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=nn.GELU)def forward(self, x, x_size, rpi):h, w = x_sizeb, _, c = x.shapeshortcut = xx = self.norm1(x)x = x.view(b, h, w, c)qkv = self.qkv(x).reshape(b, h, w, 3, c).permute(3, 0, 4, 1, 2) # 3, b, c, h, wq = qkv[0].permute(0, 2, 3, 1) # b, h, w, ckv = torch.cat((qkv[1], qkv[2]), dim=1) # b, 2*c, h, w# partition windowsq_windows = window_partition(q, self.window_size) # nw*b, window_size, window_size, cq_windows = q_windows.view(-1, self.window_size * self.window_size, c) # nw*b, window_size*window_size, ckv_windows = self.unfold(kv) # b, c*w*w, nwkv_windows = rearrange(kv_windows, 'b (nc ch owh oww) nw -> nc (b nw) (owh oww) ch', nc=2, ch=c, owh=self.overlap_win_size, oww=self.overlap_win_size).contiguous() # 2, nw*b, ow*ow, ck_windows, v_windows = kv_windows[0], kv_windows[1] # nw*b, ow*ow, cb_, nq, _ = q_windows.shape_, n, _ = k_windows.shaped = self.dim // self.num_headsq = q_windows.reshape(b_, nq, self.num_heads, d).permute(0, 2, 1, 3) # nw*b, nH, nq, dk = k_windows.reshape(b_, n, self.num_heads, d).permute(0, 2, 1, 3) # nw*b, nH, n, dv = v_windows.reshape(b_, n, self.num_heads, d).permute(0, 2, 1, 3) # nw*b, nH, n, dq = q * self.scaleattn = (q @ k.transpose(-2, -1))relative_position_bias = self.relative_position_bias_table[rpi.view(-1)].view(self.window_size * self.window_size, self.overlap_win_size * self.overlap_win_size, -1) # ws*ws, wse*wse, nHrelative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, ws*ws, wse*wseattn = attn + relative_position_bias.unsqueeze(0)attn = self.softmax(attn)attn_windows = (attn @ v).transpose(1, 2).reshape(b_, nq, self.dim)# merge windowsattn_windows = attn_windows.view(-1, self.window_size, self.window_size, self.dim)x = window_reverse(attn_windows, self.window_size, h, w) # b h w cx = x.view(b, h * w, self.dim)x = self.proj(x) + shortcutx = x + self.mlp(self.norm2(x))return xclass AttenBlocks(nn.Module):""" A series of attention blocks for one RHAG.Args:dim (int): Number of input channels.input_resolution (tuple[int]): Input resolution.depth (int): Number of blocks.num_heads (int): Number of attention heads.window_size (int): Local window size.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.drop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNormdownsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: Noneuse_checkpoint (bool): Whether to use checkpointing to save memory. Default: False."""def __init__(self,dim,input_resolution,depth,num_heads,window_size,compress_ratio,squeeze_factor,conv_scale,overlap_ratio,mlp_ratio=4.,qkv_bias=True,qk_scale=None,drop=0.,attn_drop=0.,drop_path=0.,norm_layer=nn.LayerNorm,downsample=None,use_checkpoint=False):super().__init__()self.dim = dimself.input_resolution = input_resolutionself.depth = depthself.use_checkpoint = use_checkpoint# build blocksself.blocks = nn.ModuleList([HAB(dim=dim,input_resolution=input_resolution,num_heads=num_heads,window_size=window_size,shift_size=0 if (i % 2 == 0) else window_size // 2,compress_ratio=compress_ratio,squeeze_factor=squeeze_factor,conv_scale=conv_scale,mlp_ratio=mlp_ratio,qkv_bias=qkv_bias,qk_scale=qk_scale,drop=drop,attn_drop=attn_drop,drop_path=drop_path[i] if isinstance(drop_path, list) else drop_path,norm_layer=norm_layer) for i in range(depth)])# OCABself.overlap_attn = OCAB(dim=dim,input_resolution=input_resolution,window_size=window_size,overlap_ratio=overlap_ratio,num_heads=num_heads,qkv_bias=qkv_bias,qk_scale=qk_scale,mlp_ratio=mlp_ratio,norm_layer=norm_layer)# patch merging layerif downsample is not None:self.downsample = downsample(input_resolution, dim=dim, norm_layer=norm_layer)else:self.downsample = Nonedef forward(self, x, x_size, params):for blk in self.blocks:x = blk(x, x_size, params['rpi_sa'], params['attn_mask'])x = self.overlap_attn(x, x_size, params['rpi_oca'])if self.downsample is not None:x = self.downsample(x)return xclass RHAG(nn.Module):"""Residual Hybrid Attention Group (RHAG).Args:dim (int): Number of input channels.input_resolution (tuple[int]): Input resolution.depth (int): Number of blocks.num_heads (int): Number of attention heads.window_size (int): Local window size.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.drop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNormdownsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: Noneuse_checkpoint (bool): Whether to use checkpointing to save memory. Default: False.img_size: Input image size.patch_size: Patch size.resi_connection: The convolutional block before residual connection."""def __init__(self,dim,input_resolution,depth,num_heads,window_size,compress_ratio,squeeze_factor,conv_scale,overlap_ratio,mlp_ratio=4.,qkv_bias=True,qk_scale=None,drop=0.,attn_drop=0.,drop_path=0.,norm_layer=nn.LayerNorm,downsample=None,use_checkpoint=False,img_size=224,patch_size=4,resi_connection='1conv'):super(RHAG, self).__init__()self.dim = dimself.input_resolution = input_resolutionself.residual_group = AttenBlocks(dim=dim,input_resolution=input_resolution,depth=depth,num_heads=num_heads,window_size=window_size,compress_ratio=compress_ratio,squeeze_factor=squeeze_factor,conv_scale=conv_scale,overlap_ratio=overlap_ratio,mlp_ratio=mlp_ratio,qkv_bias=qkv_bias,qk_scale=qk_scale,drop=drop,attn_drop=attn_drop,drop_path=drop_path,norm_layer=norm_layer,downsample=downsample,use_checkpoint=use_checkpoint)if resi_connection == '1conv':self.conv = nn.Conv2d(dim, dim, 3, 1, 1)elif resi_connection == 'identity':self.conv = nn.Identity()self.patch_embed = PatchEmbed(img_size=img_size, patch_size=patch_size, in_chans=0, embed_dim=dim, norm_layer=None)self.patch_unembed = PatchUnEmbed(img_size=img_size, patch_size=patch_size, in_chans=0, embed_dim=dim, norm_layer=None)def forward(self, x, x_size, params):return self.patch_embed(self.conv(self.patch_unembed(self.residual_group(x, x_size, params), x_size))) + xclass PatchEmbed(nn.Module):r""" Image to Patch EmbeddingArgs:img_size (int): Image size. Default: 224.patch_size (int): Patch token size. Default: 4.in_chans (int): Number of input image channels. Default: 3.embed_dim (int): Number of linear projection output channels. Default: 96.norm_layer (nn.Module, optional): Normalization layer. Default: None"""def __init__(self, img_size=224, patch_size=4, in_chans=3, embed_dim=96, norm_layer=None):super().__init__()img_size = to_2tuple(img_size)patch_size = to_2tuple(patch_size)patches_resolution = [img_size[0] // patch_size[0], img_size[1] // patch_size[1]]self.img_size = img_sizeself.patch_size = patch_sizeself.patches_resolution = patches_resolutionself.num_patches = patches_resolution[0] * patches_resolution[1]self.in_chans = in_chansself.embed_dim = embed_dimif norm_layer is not None:self.norm = norm_layer(embed_dim)else:self.norm = Nonedef forward(self, x):x = x.flatten(2).transpose(1, 2) # b Ph*Pw cif self.norm is not None:x = self.norm(x)return xclass PatchUnEmbed(nn.Module):r""" Image to Patch UnembeddingArgs:img_size (int): Image size. Default: 224.patch_size (int): Patch token size. Default: 4.in_chans (int): Number of input image channels. Default: 3.embed_dim (int): Number of linear projection output channels. Default: 96.norm_layer (nn.Module, optional): Normalization layer. Default: None"""def __init__(self, img_size=224, patch_size=4, in_chans=3, embed_dim=96, norm_layer=None):super().__init__()img_size = to_2tuple(img_size)patch_size = to_2tuple(patch_size)patches_resolution = [img_size[0] // patch_size[0], img_size[1] // patch_size[1]]self.img_size = img_sizeself.patch_size = patch_sizeself.patches_resolution = patches_resolutionself.num_patches = patches_resolution[0] * patches_resolution[1]self.in_chans = in_chansself.embed_dim = embed_dimdef forward(self, x, x_size):x = x.transpose(1, 2).contiguous().view(x.shape[0], self.embed_dim, x_size[0], x_size[1]) # b Ph*Pw creturn xclass Upsample(nn.Sequential):"""Upsample module.Args:scale (int): Scale factor. Supported scales: 2^n and 3.num_feat (int): Channel number of intermediate features."""def __init__(self, scale, num_feat):m = []if (scale & (scale - 1)) == 0: # scale = 2^nfor _ in range(int(math.log(scale, 2))):m.append(nn.Conv2d(num_feat, 4 * num_feat, 3, 1, 1))m.append(nn.PixelShuffle(2))elif scale == 3:m.append(nn.Conv2d(num_feat, 9 * num_feat, 3, 1, 1))m.append(nn.PixelShuffle(3))else:raise ValueError(f'scale {scale} is not supported. ' 'Supported scales: 2^n and 3.')super(Upsample, self).__init__(*m)@ARCH_REGISTRY.register()
class HAT(nn.Module):r""" Hybrid Attention TransformerA PyTorch implementation of : `Activating More Pixels in Image Super-Resolution Transformer`.Some codes are based on SwinIR.Args:img_size (int | tuple(int)): Input image size. Default 64patch_size (int | tuple(int)): Patch size. Default: 1in_chans (int): Number of input image channels. Default: 3embed_dim (int): Patch embedding dimension. Default: 96depths (tuple(int)): Depth of each Swin Transformer layer.num_heads (tuple(int)): Number of attention heads in different layers.window_size (int): Window size. Default: 7mlp_ratio (float): Ratio of mlp hidden dim to embedding dim. Default: 4qkv_bias (bool): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float): Override default qk scale of head_dim ** -0.5 if set. Default: Nonedrop_rate (float): Dropout rate. Default: 0attn_drop_rate (float): Attention dropout rate. Default: 0drop_path_rate (float): Stochastic depth rate. Default: 0.1norm_layer (nn.Module): Normalization layer. Default: nn.LayerNorm.ape (bool): If True, add absolute position embedding to the patch embedding. Default: Falsepatch_norm (bool): If True, add normalization after patch embedding. Default: Trueuse_checkpoint (bool): Whether to use checkpointing to save memory. Default: Falseupscale: Upscale factor. 2/3/4/8 for image SR, 1 for denoising and compress artifact reductionimg_range: Image range. 1. or 255.upsampler: The reconstruction reconstruction module. 'pixelshuffle'/'pixelshuffledirect'/'nearest+conv'/Noneresi_connection: The convolutional block before residual connection. '1conv'/'3conv'"""def __init__(self,in_chans=3,img_size=64,patch_size=1,embed_dim=96,depths=(6, 6, 6, 6),num_heads=(6, 6, 6, 6),window_size=7,compress_ratio=3,squeeze_factor=30,conv_scale=0.01,overlap_ratio=0.5,mlp_ratio=4.,qkv_bias=True,qk_scale=None,drop_rate=0.,attn_drop_rate=0.,drop_path_rate=0.1,norm_layer=nn.LayerNorm,ape=False,patch_norm=True,use_checkpoint=False,upscale=2,img_range=1.,upsampler='',resi_connection='1conv',**kwargs):super(HAT, self).__init__()self.window_size = window_sizeself.shift_size = window_size // 2self.overlap_ratio = overlap_rationum_in_ch = in_chansnum_out_ch = in_chansnum_feat = 64self.img_range = img_rangeif in_chans == 3:rgb_mean = (0.4488, 0.4371, 0.4040)self.mean = torch.Tensor(rgb_mean).view(1, 3, 1, 1)else:self.mean = torch.zeros(1, 1, 1, 1)self.upscale = upscaleself.upsampler = upsampler# relative position indexrelative_position_index_SA = self.calculate_rpi_sa()relative_position_index_OCA = self.calculate_rpi_oca()self.register_buffer('relative_position_index_SA', relative_position_index_SA)self.register_buffer('relative_position_index_OCA', relative_position_index_OCA)# ------------------------- 1, shallow feature extraction ------------------------- #self.conv_first = nn.Conv2d(num_in_ch, embed_dim, 3, 1, 1)# ------------------------- 2, deep feature extraction ------------------------- #self.num_layers = len(depths)self.embed_dim = embed_dimself.ape = apeself.patch_norm = patch_normself.num_features = embed_dimself.mlp_ratio = mlp_ratio# split image into non-overlapping patchesself.patch_embed = PatchEmbed(img_size=img_size,patch_size=patch_size,in_chans=embed_dim,embed_dim=embed_dim,norm_layer=norm_layer if self.patch_norm else None)num_patches = self.patch_embed.num_patchespatches_resolution = self.patch_embed.patches_resolutionself.patches_resolution = patches_resolution# merge non-overlapping patches into imageself.patch_unembed = PatchUnEmbed(img_size=img_size,patch_size=patch_size,in_chans=embed_dim,embed_dim=embed_dim,norm_layer=norm_layer if self.patch_norm else None)# absolute position embeddingif self.ape:self.absolute_pos_embed = nn.Parameter(torch.zeros(1, num_patches, embed_dim))trunc_normal_(self.absolute_pos_embed, std=.02)self.pos_drop = nn.Dropout(p=drop_rate)# stochastic depthdpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # stochastic depth decay rule# build Residual Hybrid Attention Groups (RHAG)self.layers = nn.ModuleList()for i_layer in range(self.num_layers):layer = RHAG(dim=embed_dim,input_resolution=(patches_resolution[0], patches_resolution[1]),depth=depths[i_layer],num_heads=num_heads[i_layer],window_size=window_size,compress_ratio=compress_ratio,squeeze_factor=squeeze_factor,conv_scale=conv_scale,overlap_ratio=overlap_ratio,mlp_ratio=self.mlp_ratio,qkv_bias=qkv_bias,qk_scale=qk_scale,drop=drop_rate,attn_drop=attn_drop_rate,drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])], # no impact on SR resultsnorm_layer=norm_layer,downsample=None,use_checkpoint=use_checkpoint,img_size=img_size,patch_size=patch_size,resi_connection=resi_connection)self.layers.append(layer)self.norm = norm_layer(self.num_features)# build the last conv layer in deep feature extractionif resi_connection == '1conv':self.conv_after_body = nn.Conv2d(embed_dim, embed_dim, 3, 1, 1)elif resi_connection == 'identity':self.conv_after_body = nn.Identity()# ------------------------- 3, high quality image reconstruction ------------------------- #if self.upsampler == 'pixelshuffle':# for classical SRself.conv_before_upsample = nn.Sequential(nn.Conv2d(embed_dim, num_feat, 3, 1, 1), nn.LeakyReLU(inplace=True))self.upsample = Upsample(upscale, num_feat)self.conv_last = nn.Conv2d(num_feat, num_out_ch, 3, 1, 1)self.apply(self._init_weights)def _init_weights(self, m):if isinstance(m, nn.Linear):trunc_normal_(m.weight, std=.02)if isinstance(m, nn.Linear) and m.bias is not None:nn.init.constant_(m.bias, 0)elif isinstance(m, nn.LayerNorm):nn.init.constant_(m.bias, 0)nn.init.constant_(m.weight, 1.0)def calculate_rpi_sa(self):# calculate relative position index for SAcoords_h = torch.arange(self.window_size)coords_w = torch.arange(self.window_size)coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Wwcoords_flatten = torch.flatten(coords, 1) # 2, Wh*Wwrelative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Wwrelative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2relative_coords[:, :, 0] += self.window_size - 1 # shift to start from 0relative_coords[:, :, 1] += self.window_size - 1relative_coords[:, :, 0] *= 2 * self.window_size - 1relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Wwreturn relative_position_indexdef calculate_rpi_oca(self):# calculate relative position index for OCAwindow_size_ori = self.window_sizewindow_size_ext = self.window_size + int(self.overlap_ratio * self.window_size)coords_h = torch.arange(window_size_ori)coords_w = torch.arange(window_size_ori)coords_ori = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, ws, wscoords_ori_flatten = torch.flatten(coords_ori, 1) # 2, ws*wscoords_h = torch.arange(window_size_ext)coords_w = torch.arange(window_size_ext)coords_ext = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, wse, wsecoords_ext_flatten = torch.flatten(coords_ext, 1) # 2, wse*wserelative_coords = coords_ext_flatten[:, None, :] - coords_ori_flatten[:, :, None] # 2, ws*ws, wse*wserelative_coords = relative_coords.permute(1, 2, 0).contiguous() # ws*ws, wse*wse, 2relative_coords[:, :, 0] += window_size_ori - window_size_ext + 1 # shift to start from 0relative_coords[:, :, 1] += window_size_ori - window_size_ext + 1relative_coords[:, :, 0] *= window_size_ori + window_size_ext - 1relative_position_index = relative_coords.sum(-1)return relative_position_indexdef calculate_mask(self, x_size):# calculate attention mask for SW-MSAh, w = x_sizeimg_mask = torch.zeros((1, h, w, 1)) # 1 h w 1h_slices = (slice(0, -self.window_size), slice(-self.window_size,-self.shift_size), slice(-self.shift_size, None))w_slices = (slice(0, -self.window_size), slice(-self.window_size,-self.shift_size), slice(-self.shift_size, None))cnt = 0for h in h_slices:for w in w_slices:img_mask[:, h, w, :] = cntcnt += 1mask_windows = window_partition(img_mask, self.window_size) # nw, window_size, window_size, 1mask_windows = mask_windows.view(-1, self.window_size * self.window_size)attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))return attn_mask@torch.jit.ignoredef no_weight_decay(self):return {'absolute_pos_embed'}@torch.jit.ignoredef no_weight_decay_keywords(self):return {'relative_position_bias_table'}def forward_features(self, x):x_size = (x.shape[2], x.shape[3])# Calculate attention mask and relative position index in advance to speed up inference.# The original code is very time-consuming for large window size.attn_mask = self.calculate_mask(x_size).to(x.device)params = {'attn_mask': attn_mask, 'rpi_sa': self.relative_position_index_SA, 'rpi_oca': self.relative_position_index_OCA}x = self.patch_embed(x)if self.ape:x = x + self.absolute_pos_embedx = self.pos_drop(x)for layer in self.layers:x = layer(x, x_size, params)x = self.norm(x) # b seq_len cx = self.patch_unembed(x, x_size)return xdef forward(self, x):self.mean = self.mean.type_as(x)x = (x - self.mean) * self.img_rangeif self.upsampler == 'pixelshuffle':# for classical SRx = self.conv_first(x)x = self.conv_after_body(self.forward_features(x)) + xx = self.conv_before_upsample(x)x = self.conv_last(self.upsample(x))x = x / self.img_range + self.meanreturn x
四、手把手教你添加HAttention机制
这个HAttention代码刚拿来不能够直接使用的,我在官方的代码基础上做了一定的修改,方便大家使用,所以希望大家给博主点点赞收藏以下,如果你能够成功复现希望大家给博文评论支持以下。
下面是使用教程->
修改一
在上面我们已经将代码复制粘贴到'ultralytics/nn/modules'的目录下,创建一个py文件粘贴进去DAttention.py。下面我们找到文件'ultralytics/nn/tasks.py'在开头导入我们的注意力机制,如下图所示。

修改二
我们找到七百多行的代码,按照我的方法进行添加,可以看到红框内有好多代码,我们只保留字典里你需要的DAT就行,其余的你没有大家不用添加。

elif m in {HAT}:args = [ch[f], *args]到此就修改完成了,我们直接就可以使用该代码了(为什么这么简单是因为我修改了官方的代码,让使用方法统一起来所以大家用着很简单。)
五、HAttention的yaml文件
在这里我给大家推荐两种添加的方式,像这种注意力机制不要添加在主干上,添加在检测头里(涨点效果最好)或者Neck的输出部分是最好的,你放在主干上,后面经过各种处理信息早已经丢失了,所以没啥效果。
5.1 HAttention的yaml文件一
这个我在大目标检测的输出添加了一个HAttention注意力机制,也是我实验跑出来的版本,这个文章是有个读者指定的所以实验结果都是刚刚出炉的,后面大家有什么想看的机制都可以指定。
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOP# YOLOv8.0n backbone
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4- [-1, 3, C2f, [128, True]]- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8- [-1, 6, C2f, [256, True]]- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16- [-1, 6, C2f, [512, True]]- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32- [-1, 3, C2f, [1024, True]]- [-1, 1, SPPF, [1024, 5]] # 9# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 6], 1, Concat, [1]] # cat backbone P4- [-1, 3, C2f, [512]] # 12- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 4], 1, Concat, [1]] # cat backbone P3- [-1, 3, C2f, [256]] # 15 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 12], 1, Concat, [1]] # cat head P4- [-1, 3, C2f, [512]] # 18 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 9], 1, Concat, [1]] # cat head P5- [-1, 3, C2f, [1024]] # 21 (P5/32-large)- [-1, 1, HAT, []] # 22- [[15, 18, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
5.2 HAttention的yaml文件二
这个版本在三个目标检测层都添加了,HAT机制,具体效果我没有尝试,但是此版本估计显存需要的比较大,使用时候需要注意降低一定的batch否则爆显存的错误大家尽量不要在评论区评论,有时候真的被大家搞得很无奈一些低级报错发在评论区好像我发的机制有问题,刚才有一个同学用我的SPD-Conv,里面报错autopad,就是没有导入这个模块他发在了评论区,我觉得这 就是简单导入一下这个模块鼠标放在上面点一下的问题,我希望大家看我的博客的同时也要提高自己的动手能力我也是真希望大家能够学到一些,只会照搬也不行的。
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOP# YOLOv8.0n backbone
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4- [-1, 3, C2f, [128, True]]- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8- [-1, 6, C2f, [256, True]]- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16- [-1, 6, C2f, [512, True]]- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32- [-1, 3, C2f, [1024, True]]- [-1, 1, SPPF, [1024, 5]] # 9# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 6], 1, Concat, [1]] # cat backbone P4- [-1, 3, C2f, [512]] # 12- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 4], 1, Concat, [1]] # cat backbone P3- [-1, 3, C2f, [256]] # 15 (P3/8-small)- [-1, 1, HAT, []] # 16- [-1, 1, Conv, [256, 3, 2]]- [[-1, 12], 1, Concat, [1]] # cat head P4- [-1, 3, C2f, [512]] # 19 (P4/16-medium)- [-1, 1, HAT, []] # 20- [-1, 1, Conv, [512, 3, 2]]- [[-1, 9], 1, Concat, [1]] # cat head P5- [-1, 3, C2f, [1024]] # 23 (P5/32-large)- [-1, 1, HAT, []] # 24- [[16, 20, 24], 1, Detect, [nc]] # Detect(P3, P4, P5)
5.3 推荐HAttention可添加的位置
HAttention是一种即插即用的注意力机制模块,其可以添加的位置有很多,添加的位置不同效果也不同,所以我下面推荐几个添加的位,置大家可以进行参考,当然不一定要按照我推荐的地方添加。
残差连接中:在残差网络的残差连接中加入MHSA。
Neck部分:YOLOv8的Neck部分负责特征融合,这里添加MSDA可以帮助模型更有效地融合不同层次的特征(yaml文件一和二)。
Backbone:可以替换中干网络中的卷积部分(只能替换不改变通道数的卷积)
能添加的位置很多,一篇文章很难全部介绍到,后期我会发文件里面集成上百种的改进机制,然后还有许多融合模块,给大家,尤其是检测头里改进非常困难,这些属于进阶篇后期会发。
5.4 HAttention的训练过程截图
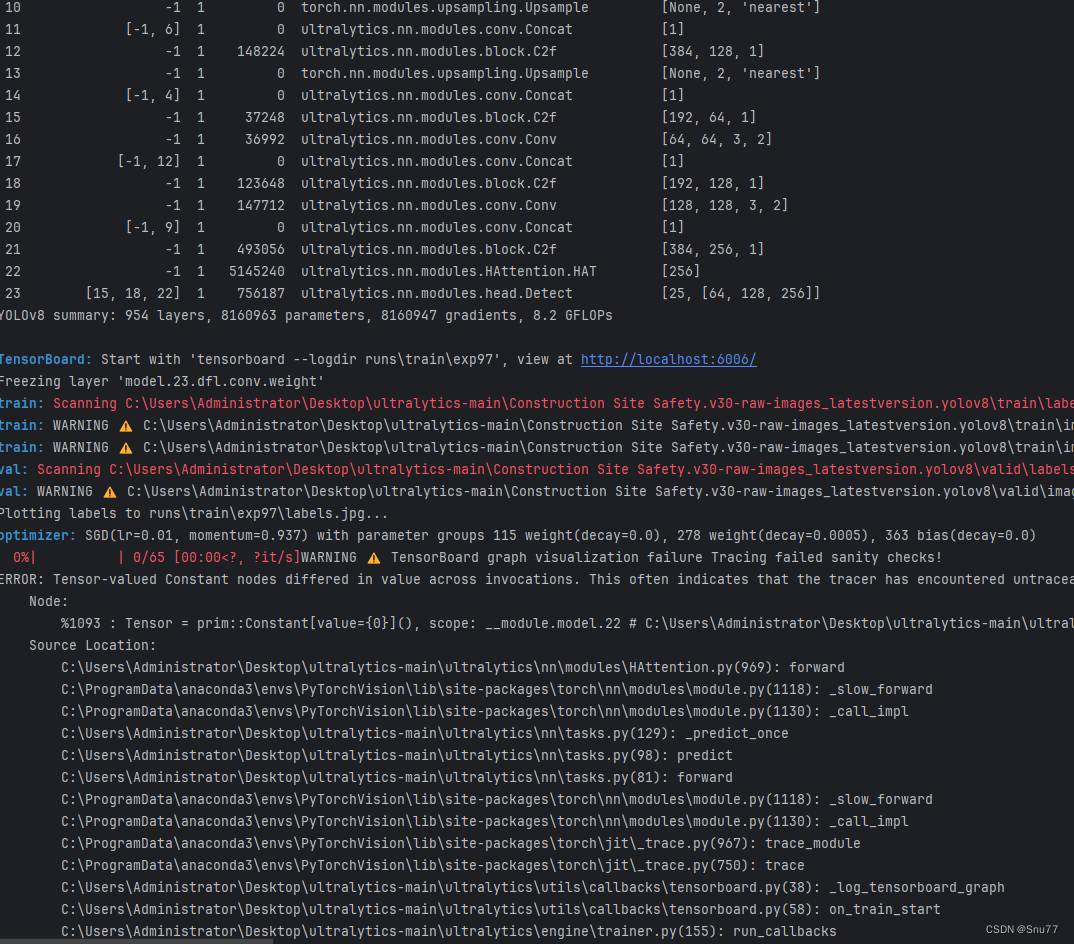
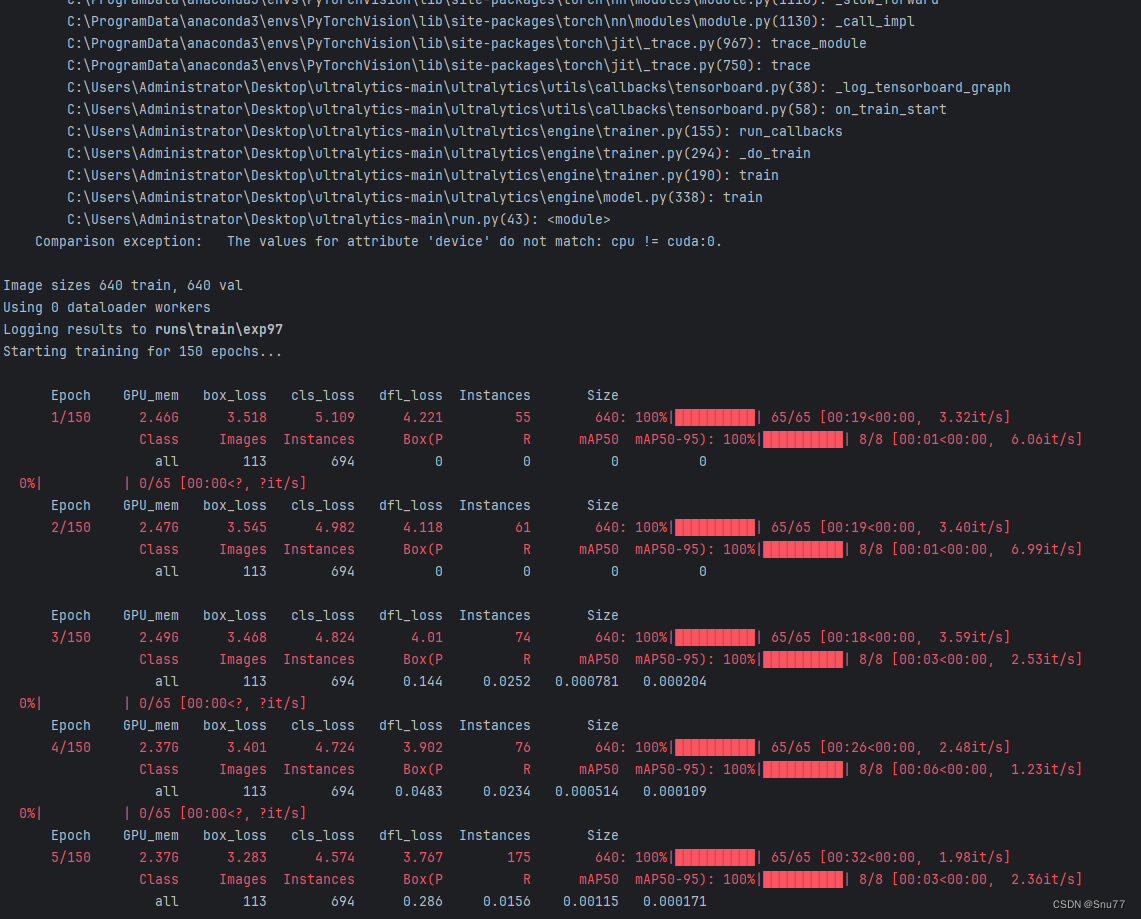
下面是添加了HAttention的训练截图。
大家可以看下面的运行结果和添加的位置所以不存在我发的代码不全或者运行不了的问题大家有问题也可以在评论区评论我看到都会为大家解答(我知道的),这里我运行的时候有一个警告我没有关,估计也不影响运行和精度就没去处理。
五、本文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv8改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,目前本专栏免费阅读(暂时,大家尽早关注不迷路~),如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
专栏回顾:YOLOv8改进系列专栏——本专栏持续复习各种顶会内容——科研必备

相关文章:
YOLOv8改进 | 2023注意力篇 | HAttention(HAT)超分辨率重建助力小目标检测 (全网首发)
一、本文介绍 本文给大家带来的改进机制是HAttention注意力机制,混合注意力变换器(HAT)的设计理念是通过融合通道注意力和自注意力机制来提升单图像超分辨率重建的性能。通道注意力关注于识别哪些通道更重要,而自注意力则关注于图…...
IDEA Community html文件里的script标签没有syntax highlighting的解决方案
在网上找到的解决方法有的是针对Ultimate版本才可以下载的plugin,对我所用的Community版本无法生效,找了一圈最后在stackoverflow上找到一个有效的方案,给需要的小伙伴分享一下:IntelliJ Community Edition: Javascript syntax hi…...

如何获取旧版 macOS
识别机型支持的最新的兼容操作系统 识别 MacBook Air - 官方 Apple 支持 (中国) 社区网站:AppStore 无法找到macos cata… - Apple 社区 官网链接隐藏比较深:如何下载和安装 macOS - 官方 Apple 支持 (中国) 获取磁盘映像 Lion 10.7 https://update…...
vp与vs联合开发-Ini配置文件
1.*.ini文件是Initialization file的缩写,即为初始化文件,是Windows系统配置文件所采用的存储格式,统管Windows的各项配置, 2.可以用来存放软件信息、注册表信息等 3.可以使用代码方式和手动编辑操作 ,一般不用直接编辑…...
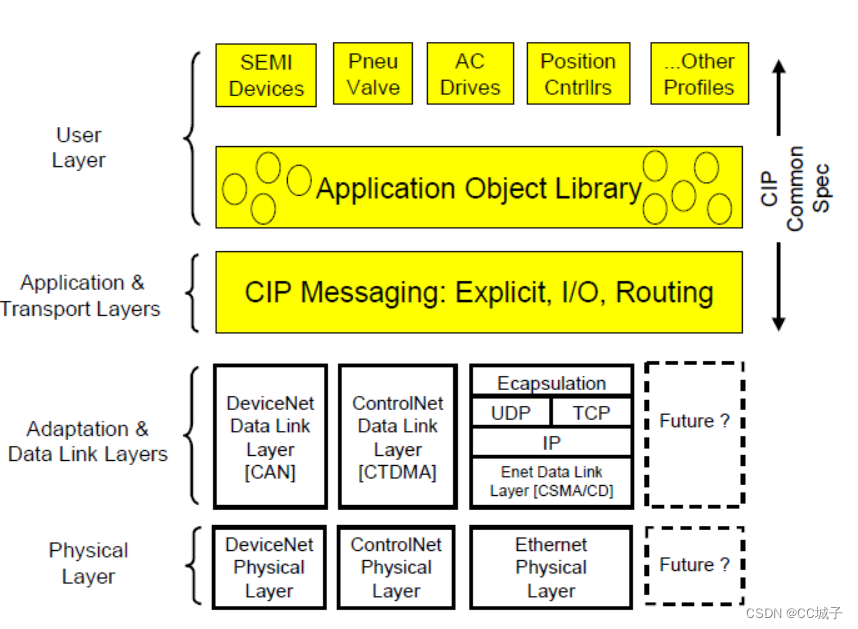
Ethernet/IP 之IO 连接简要记录
IO连接 EIP的IO连接提供了在一个生产者和多个消费者之间的特定的通信路径,以达到IO数据在IO连接下传输。 生产者对象产生IO数据通过生产者IO连接管理者对象将连接ID和数据组帧发送给消费者IO连接管理者对象然后将IO数据发送给消费者对象。 显示消息连接 显式消息传…...

【python基础】-- yarn add 添加依赖的各种类型
目录 1、安装 yarn 1.1 使用npm安装 1.2 查看版本 1.3 yarn 淘宝源配置 2、安装命令说明 2.1 yarn add(会更新package.json和yarn.lock) 2.2 yarn install 2.3 一些操作 2.3.1 发布包 2.3.2 移除一个包 2.3.3 更新一个依赖 2.3.4 运行脚本 …...

@Autowired搭配@interface注解实现策略模式
应用场景:存在银行卡和社保卡的支付、退货等接口,接口报文中使用transWay表示银行卡(0)和社保卡(1),transType表示支付(1)、退货(2)。那么由其组合…...

Linux CentOS下Composer简单使用
1.下载composer-setup.php cd /usr/local/src php -r “copy(‘https://install.phpcomposer.com/installer’, ‘composer-setup.php’);”2.安装composer php composer-setup.php3.设置全局composer cp composer.phar /usr/local/bin/composer4.设置国内镜像 composer co…...
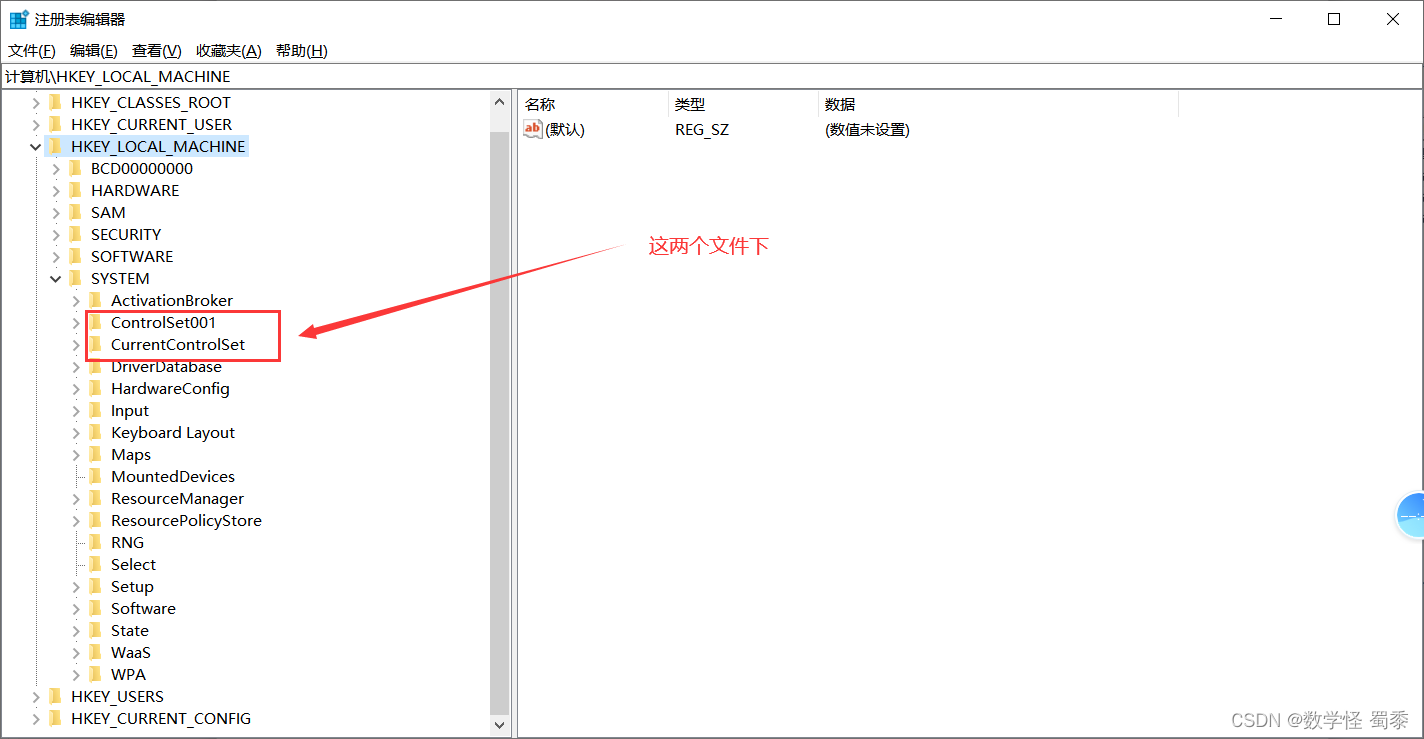
Mysql-干净卸载教程
卸载 服务停掉 先把mysql服务停掉,如下点击右键,停止运行。 删除C盘内文件 接下来c盘里面的三个文件下的MySQL一一删除,需要注意的是 需要注意的是programdata文件下可能 隐藏了MySQL文件,所以可以在查看选项显示隐藏的文件。 …...
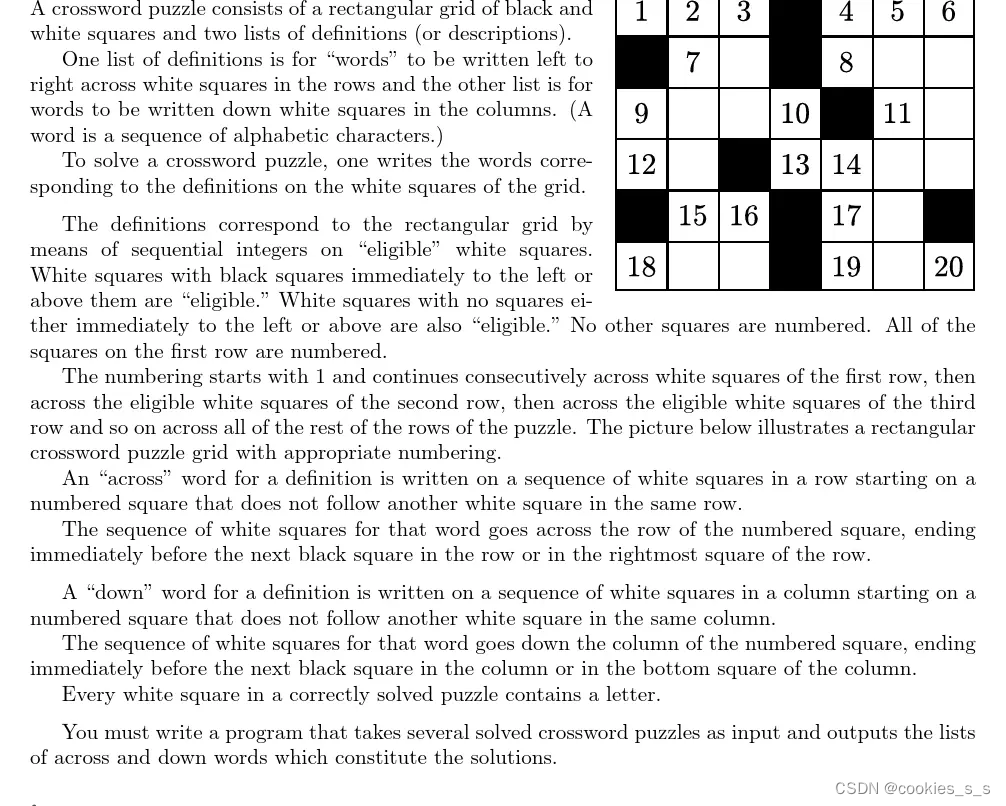
纵横字谜的答案 Crossword Answers
纵横字谜的答案 Crossword Answers - 洛谷 | 计算机科学教育新生态 (luogu.com.cn) 翻译后大概是: 有一个 r 行 c 列 (1<r,c<10) 的网格,黑格为 * ,每个白格都填有一个字母。如果一个白格的左边相邻位置或者上边相邻位置没有白格&…...
cpp_04_类_对象_this指针_常对象_常(成员)函数
1 类 1.1 类的定义 类的作用是抽象事物(抽取事物特征)的规则。 类的外化表现是用户自定义的复合数据类型(包括成员变量、成员函数): 成员变量用于表达事物的属性,成员函数用于表达事物的行为。 类的表现…...

AttributeError: module ‘_winapi‘ has no attribute ‘SYNCHRONIZE‘解决方案
大家好,我是爱编程的喵喵。双985硕士毕业,现担任全栈工程师一职,热衷于将数据思维应用到工作与生活中。从事机器学习以及相关的前后端开发工作。曾在阿里云、科大讯飞、CCF等比赛获得多次Top名次。现为CSDN博客专家、人工智能领域优质创作者。喜欢通过博客创作的方式对所学的…...

多媒体互动橱窗设计如何改变内容展示形式?
橱窗设计在展品展示中扮演着举足轻重的角色,它相较于传统展示形式,能更直观地呈现展品效果,而且优质的橱窗设计还能提升品牌的产品形象,正因此,也被广泛应用于企业、博物馆、店铺等场所。随着多媒体技术的蓬勃发展和行…...

flutter自定义地图Marker完美展示图片
世人都说雪景美 寒风冻脚无人疼 只道是一身正气 结论 参考Flutter集成高德地图并添加自定义Maker先实现自定义Marker。如果自定义Marker中用到了图片,那么会碰到图片没有被绘制到Marker的问题,此时需要通过precacheImage来预加载图片,从而解…...

no module named cv2 、numpy 、xxx超全解决方案
常规解决方案可见博客: https://blog.csdn.net/ALiLiLiYa/article/details/126988014 案例 上述仍没有解决,可以参考如下进行: 例如:明明文件夹存在下述文件,仍然报错。那么可能缺少环境变量导致。 No module named …...
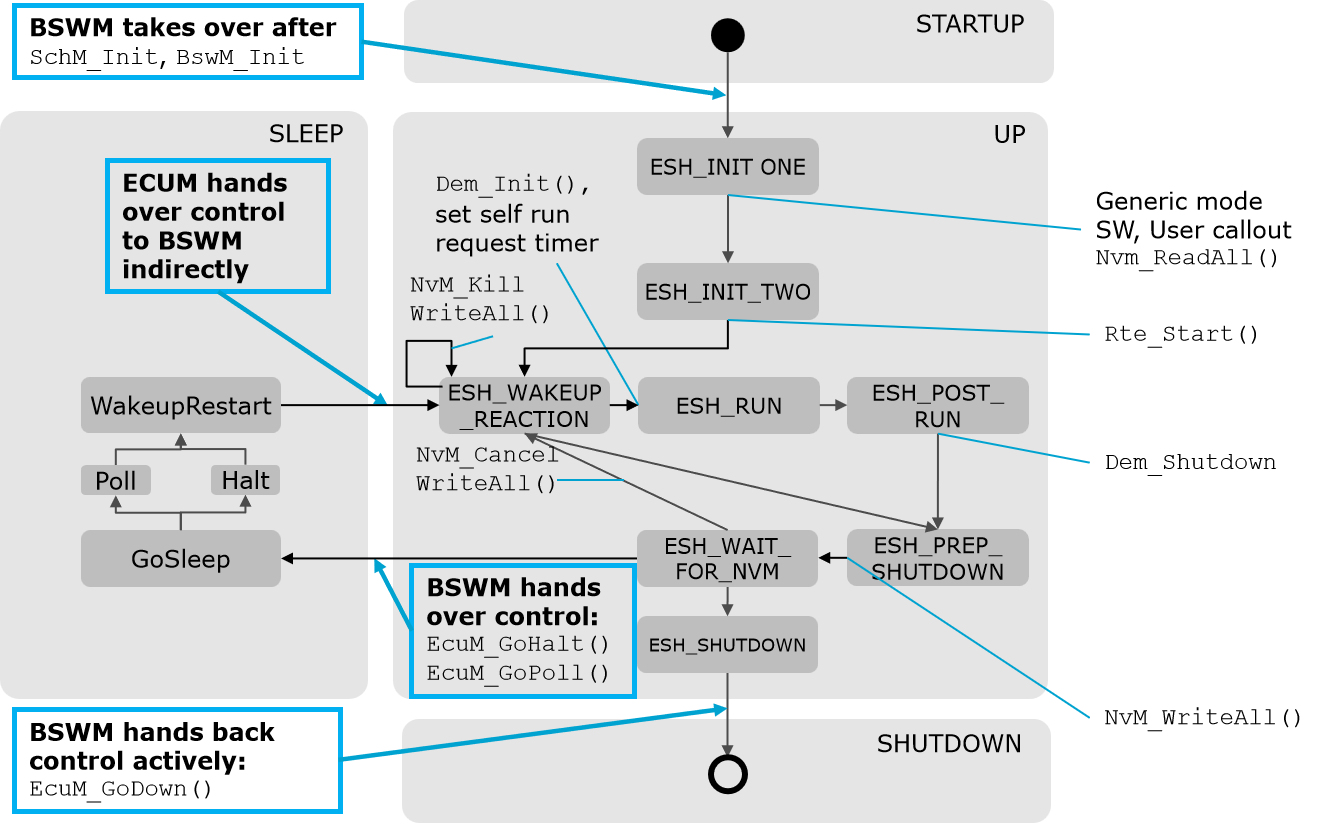
BSWM 模式管理(二)ESH
BSWM 模式管理 ESH 1 ECU State Handling (ESH)2 BSWM ESH 五大模式与六大通用状态机3 状态机对应的切换条件 conditions or rules4 默认主要的 ACTION 或者 ACTION LIST1 ECU State Handling (ESH) 与 ECUM 相关,整个 ECU 状态管理的状态机制 2 BSWM ESH 五大模式与六大通…...
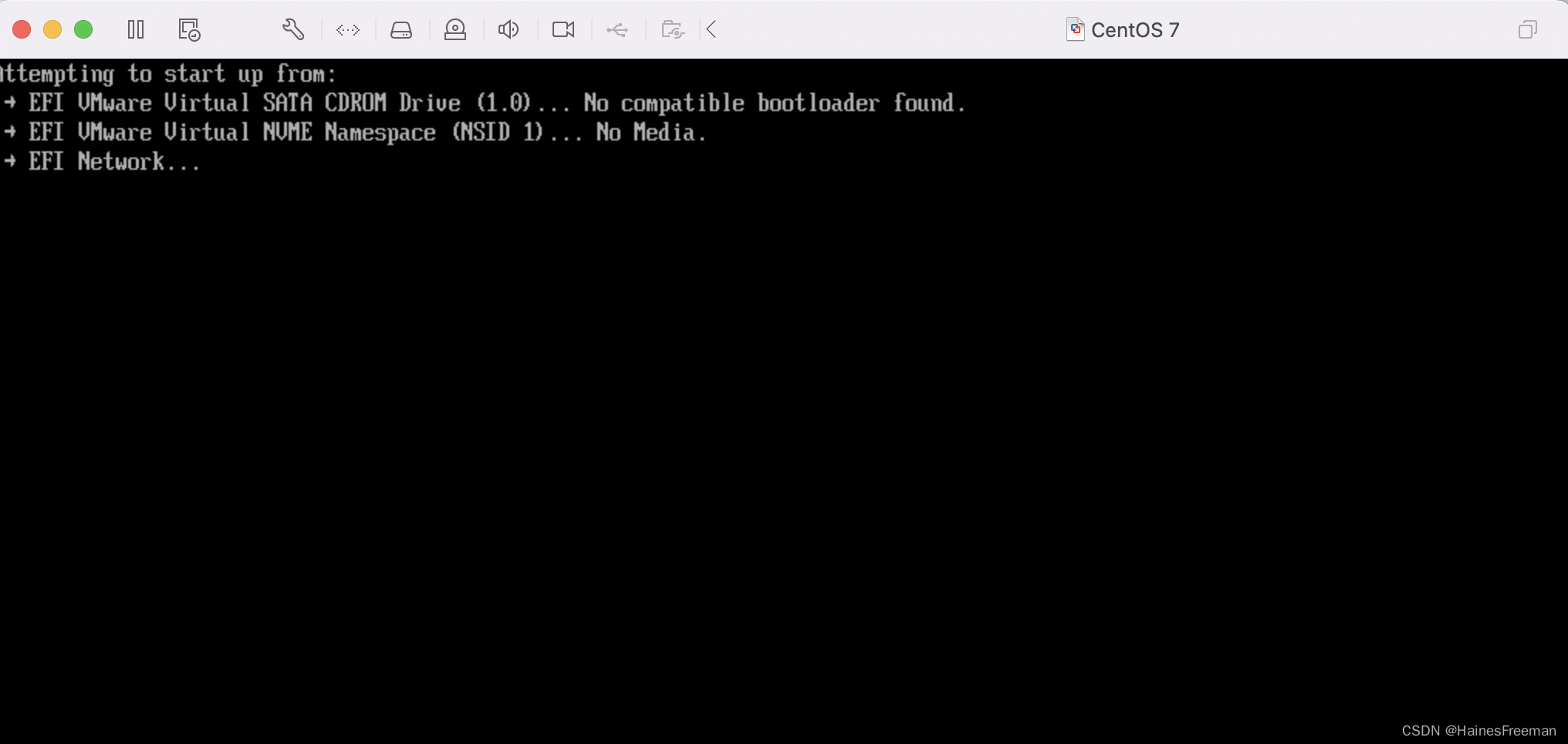
mac电脑安装虚拟机教程
1、准备一台虚拟机,安装CentOS7 常用的虚拟化软件有两种: VirtualBoxVMware 这里我们使用VirtualBox来安装虚拟机,下载地址:Downloads – Oracle VM VirtualBox 001 点击安装 002 报错:he installer has detected an…...

手动配置 kafka 用户密码,认证方式等的方式
场景 部分场景会指定使用某一kafka 来提高安全性,这里就不得不使用用户密码认证方式等来控制 方法示例 // 手动加载配置信息private Map<String, Object> consumerConfigs() {Map<String, Object> props new HashMap<>();props.put(ConsumerCo…...
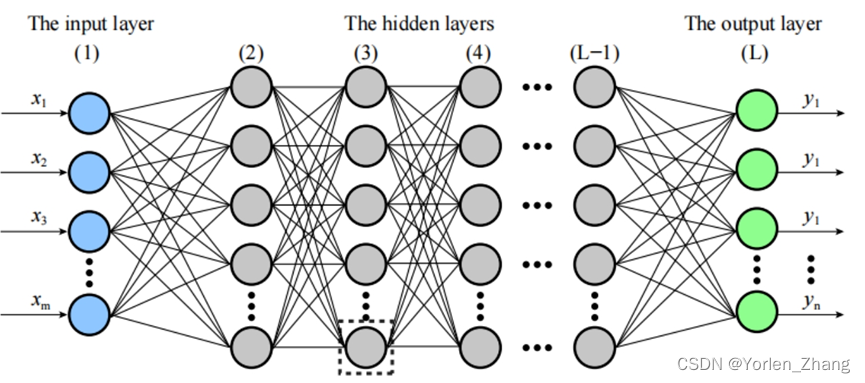
机器学习 深度学习 神经网络
神经网络概念: 神经网络是一个由生物神经元组成的网络或电路,或者从现代意义上讲,是一个由人工神经元或节点组成的人工神经网络。因此,一个神经网络要么是由生物神经元组成的生物神经网络,要么是用于解决人工智能&…...
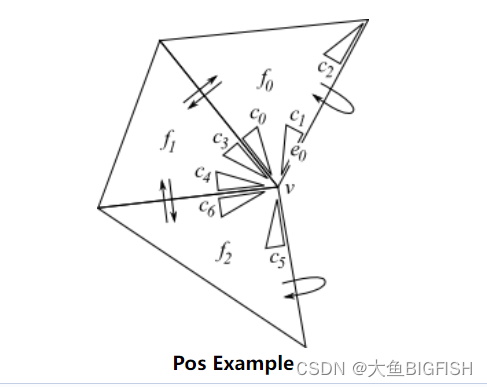
VCG 获取某个顶点的邻接顶点
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 与之前的思路相同,这里我们利用VCG为我们提供的拓扑结构,获取某个顶点的邻接顶点,这在我们处理网格数据时往往很有用。 二、实现代码 //VCG #include <vcg/complex/algorithms/create/platonic.h> #inclu…...

UniApp离线打包实战:彻底移除启动页雪花效果与加载图标的终极方案
1. 为什么需要移除UniApp启动页的雪花效果与加载图标? 很多开发者在使用UniApp进行跨平台开发时,都会遇到一个共同的问题:默认的启动页雪花效果和加载图标无法通过简单的配置关闭。尤其是在离线打包的场景下,这个问题更加突出。 启…...

Keil5安装与STM32开发环境搭建:为AIoT设备赋予视觉生成能力
Keil5安装与STM32开发环境搭建:为AIoT设备赋予视觉生成能力 最近在捣鼓一个挺有意思的项目,想给一个STM32的小设备加上点“想象力”——让它能根据传感器数据或者简单的指令,生成对应的图片。比如,温度高了就生成一个“火焰”图标…...

Ostrakon-VL-8B零售场景Prompt工程:7类高频任务标准化提示词模板库
Ostrakon-VL-8B零售场景Prompt工程:7类高频任务标准化提示词模板库 1. 引言:为什么零售场景需要专门的提示词模板? 如果你在零售行业工作过,一定遇到过这样的场景:面对货架上琳琅满目的商品,想要快速盘点…...

3步终极指南:如何简单高效绕过付费墙限制
3步终极指南:如何简单高效绕过付费墙限制 【免费下载链接】bypass-paywalls-chrome-clean 项目地址: https://gitcode.com/GitHub_Trending/by/bypass-paywalls-chrome-clean 在数字内容日益商业化的今天,Bypass Paywalls Clean作为一款专业的Ch…...

文墨共鸣应用分享:小编用它查文案重复,老师用它辅助批改作业
文墨共鸣应用分享:小编用它查文案重复,老师用它辅助批改作业 1. 引言:当传统美学遇上AI语义分析 在内容创作和教育领域,我们经常面临一个共同挑战:如何快速准确地判断两段文字是否表达了相同的意思。传统的人工比对方…...

NEURAL MASK幻镜效果可视化:边缘像素级误差分布统计图表
NEURAL MASK幻镜效果可视化:边缘像素级误差分布统计图表 1. 引言:从艺术到科学的抠图精度分析 当我们谈论AI抠图工具时,往往只关注最终效果是否"看起来不错",但专业创作者需要更精确的量化标准。NEURAL MASK幻镜作为基…...
)
告别复杂流程:用LiteFlow轻松搭建可维护的工作流系统(避坑指南)
告别复杂流程:用LiteFlow轻松搭建可维护的工作流系统(避坑指南) 在数字化转型浪潮中,业务流程自动化已成为企业提升效率的关键。但传统工作流系统往往面临两大痛点:初期搭建复杂度过高,后期维护成本难以控制…...

探索Ryujinx:开源Switch模拟器完全指南
探索Ryujinx:开源Switch模拟器完全指南 【免费下载链接】Ryujinx 用 C# 编写的实验性 Nintendo Switch 模拟器 项目地址: https://gitcode.com/GitHub_Trending/ry/Ryujinx 当你拥有一台性能强劲的PC,却因Switch硬件限制无法体验《塞尔达传说&…...

基于AnyLogic的苏超赛场疏散仿真研究
基于AnyLogic的苏超赛场疏散仿真研究 摘要:随着大型体育赛事观众规模的不断扩大,赛场安全疏散问题日益凸显。苏格兰足球超级联赛(苏超)赛场常涌入数万名情绪高涨的球迷,其复杂的环形看台结构与高密度人群给应急疏散带来了巨大挑战。本研究旨在利用AnyLogic仿真平台,构建…...

汇川中型PLC纯ST语言双轴同步设备程序
汇川中型plc+纯ST语言双轴同步设备,程序中没有使用任何库文件,纯原生codesys功能块。 非常适合初学入门者,三个虚拟驱动模拟虚主轴和两个伺服从轴,只要手里有汇川AM400,600,AC700,800即可实际运行该项目程序…...