[RK-Linux] RK3399支持M.2 NVMe SSD启动
延续《[RK-Linux] 从主线U-Boot移植PCIe及其PHY驱动到RK3399 U-Boot》
启动流程:
maskrom -> loader(从 eMMC 存储器加载) -> u-boot(从 eMMC 存储器加载)-> kernel (从 M.2 NVMe SSD 加载)-> rootfs (从 M.2 NVMe SSD 挂载)
配置从 M.2 NVMe SSD 启动:
CONFIG_ROCKCHIP_BOOTDEV="nvme 0"
重新编译烧录到 eMMC,启动日志报错:
DM: v1
failed to get refclk clock phandle
failed to get pcie-phy (ret=-22)
dwmmc@fe320000: 1, sdhci@fe330000: 0
Bootdev(atags): mmc 0
MMC0: HS400, 150Mhz
PartType: EFI
No misc partition
boot mode: normal
Found DTB in boot part
DTB: rk-kernel.dtb
HASH(c): OK
提示 PCIe 时钟及其 PHY 初始化失败了,但是调试的时候在命令行用 pci enum 与 nvme scan 是可以识别的。
这是因为后面加载内核设备树之后,驱动初始化成功了。但是在加载内核设备树之前是使用 u-boot 设备树来初始化的。
配
相关文章:

[RK-Linux] RK3399支持M.2 NVMe SSD启动
延续《[RK-Linux] 从主线U-Boot移植PCIe及其PHY驱动到RK3399 U-Boot》 启动流程: maskrom -> loader(从 eMMC 存储器加载) -> u-boot(从 eMMC 存储器加载)-> kernel (从 M.2 NVMe SSD 加载)-> rootfs (从 M.2 NVMe SSD 挂载)配置从 M.2 NVMe SSD 启动: …...
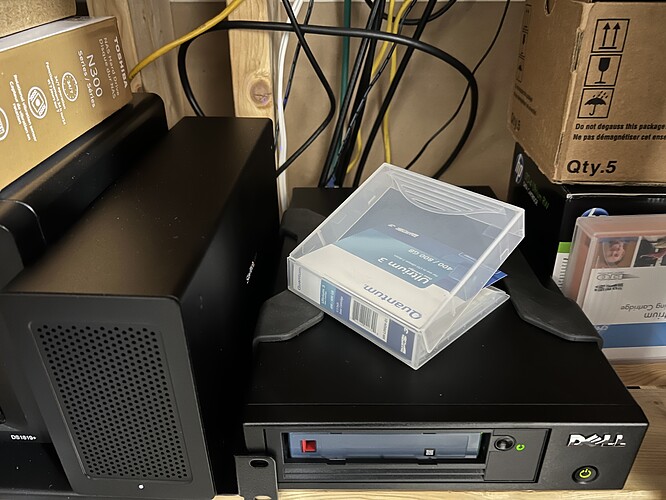
LTO-3 磁带机种草终于是用上了
跑来跑去,买了不少配件,终于是把这磁带机给用上了,已经备份好了300 多 GB 的数据。 我们用了 NAS 的数据压缩功能,把需要备份的文件用 NAS 压缩成一个 Zip 文件,如果你可以 tar 的话也行。 这样传输速度更快…...

【全网首发】洛谷P1020 [NOIP1999 提高组] 导弹拦截
P1020 导弹拦截 の 题目传送门。 解题思路 显然,第一问求的是最长不上升子序列。 于是接下来直接抛开第一问不谈,也不考虑优化,直接考虑第二问。待会就知道原因了。 引理:Dilworth 定理 狄尔沃斯定理亦称偏序集分解定理&#…...
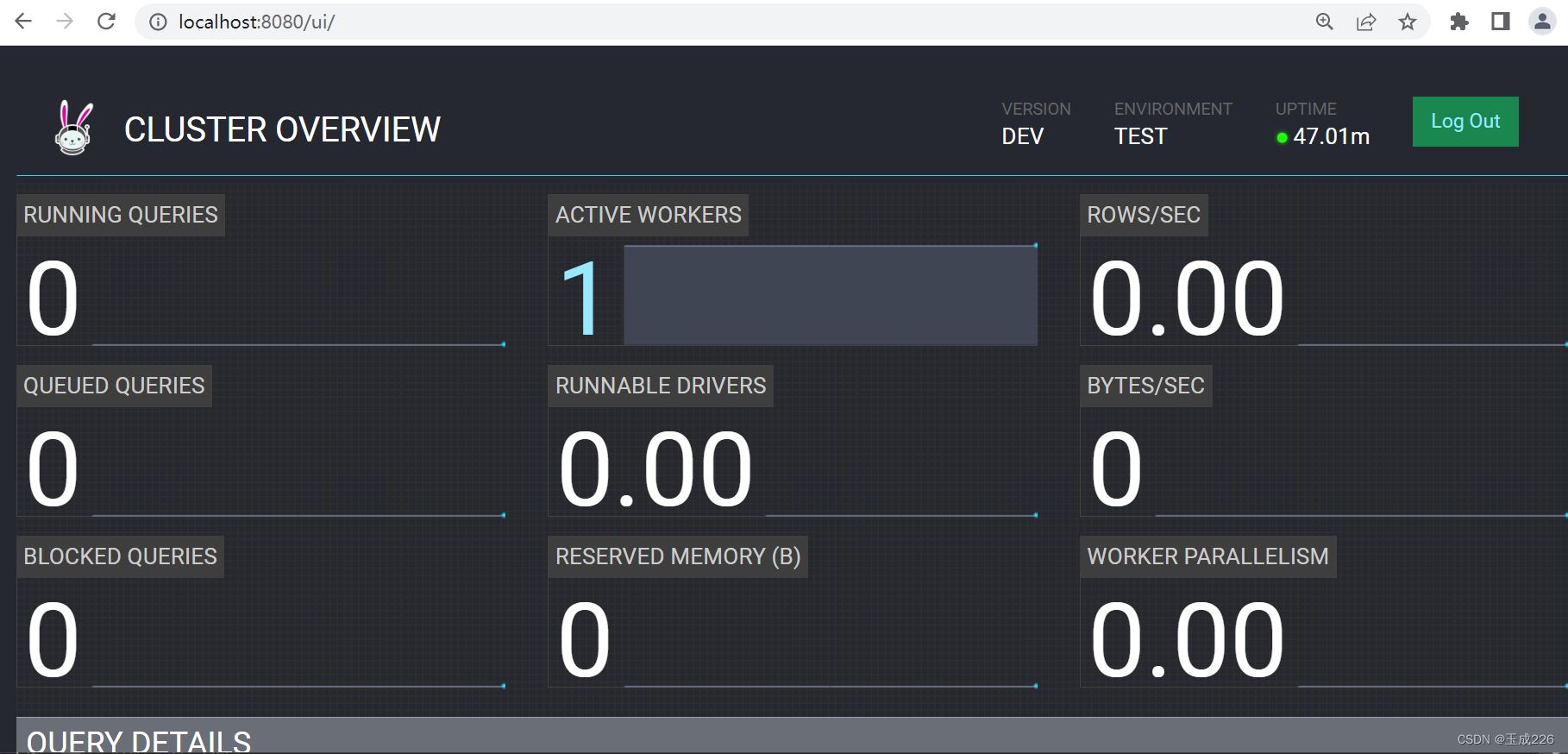
trino-435版本windows下源码编译
一、源码下载地址 https://github.com/trinodb/trino/tags 二、编译环境及工具准备 1、maven (1)版本:3.6.3 (2)settings.xml配置 <?xml version"1.0" encoding"UTF-8"?> <settin…...

java类和对象的思想概述
0.面向对象Object OOP——名人名言:类是写出来的,对象是new出来的 **> 学习面向对象的三条路线 java类以及类成员:(重点)类成员——属性、方法、构造器、(熟悉)代码块、内部类面向对象特征&…...

ant design vue3中引入message消息提示,全局引入亲测有效
两种方式 第一种:使用provide和inject方式 第二种:使用全局挂载$message方式 第一种: //main.ts import { createApp } from vue; import App from ./App; import Antd,{ message } from ant-design-vue; import ant-design-vue/es/mess…...
UE5 Landscape 制作GIS卫星图地形
1. 总体想法: 制作GIS地形,使用Landscaping MapBox是一个好方法,但是区域过大,会占用很多内存 https://blog.csdn.net/qq_17523181/article/details/135029614 如果采用QGis,导出卫星图,在UE5里拼合出地形…...
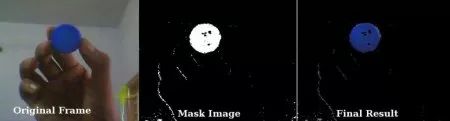
opencv入门到精通——改变颜色空间
目录 目标 改变颜色空间 对象追踪 如何找到要追踪的HSV值? 目标 在本教程中,你将学习如何将图像从一个色彩空间转换到另一个,像BGR↔灰色,BGR↔HSV等 除此之外,我们还将创建一个应用程序,以提取视频中的…...
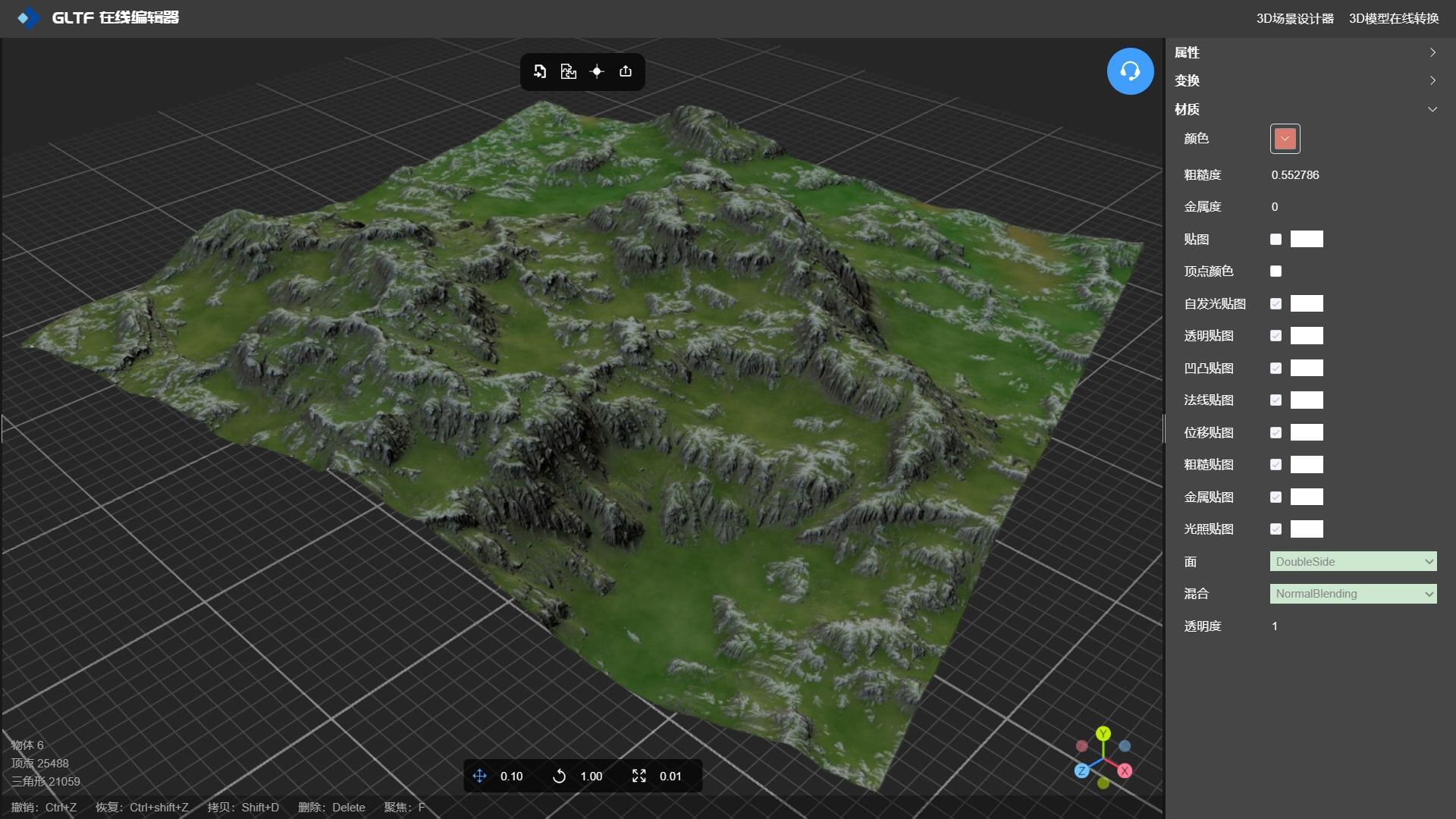
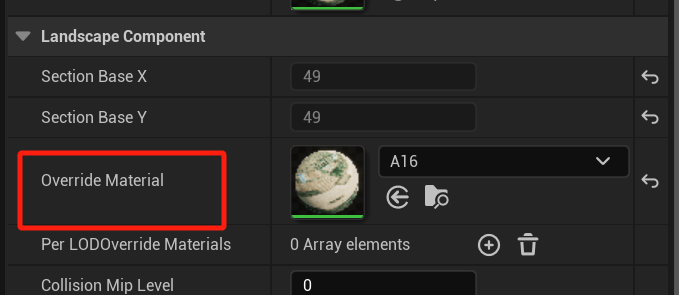
法线贴图实现地形模型皱褶、凹凸不平的纹理效果
在线工具推荐: 3D数字孪生场景编辑器 - GLTF/GLB材质纹理编辑器 - 3D模型在线转换 - Three.js AI自动纹理开发包 - YOLO 虚幻合成数据生成器 - 三维模型预览图生成器 - 3D模型语义搜索引擎 法线贴图在3D建模中扮演着重要的角色,它通过模拟表面的微…...

【SpringBoot篇】基于Redis实现生成全局唯一ID的方法
文章目录 🍔生成全局唯一ID🌹为什么要生成全局唯一id🌺生成全局id的方法✨代码实现 🍔生成全局唯一ID 是一种在分布式系统下用来生成全局唯一id的工具 在项目中生成全局唯一ID有很多好处,其中包括: 数据…...

轻度听力损失的儿童需要早期干预吗?
一些宝宝在做听力筛查时总是不通过,进一步听力诊断发现宝宝有轻度的听力损失,刚知道这个消息时,家长可担心了,总想着宝宝是不是听不到啊?但是一段时间后,有些家长又会忽略宝宝的听力问题,因为部…...

【Spring Security】认证密码加密Token令牌CSRF的使用详解
🎉🎉欢迎来到我的CSDN主页!🎉🎉 🏅我是Java方文山,一个在CSDN分享笔记的博主。📚📚 🌟推荐给大家我的专栏《Spring Security》。🎯🎯 …...

python一点通: 一文讲清Post 和 Put操作区别!
当我们使用网络服务时,如果我们不能小心地区分 POST 和 PUT,有时可能会触发错误。 在 Web 开发世界中,特别是在处理 RESTful API 时,HTTP 方法 POST 和 PUT 经常被使用,但常常被误解。这两者都用于向服务器发送数据&a…...
通过 Higress Wasm 插件 3 倍性能实现 Spring-cloud-gateway 功能
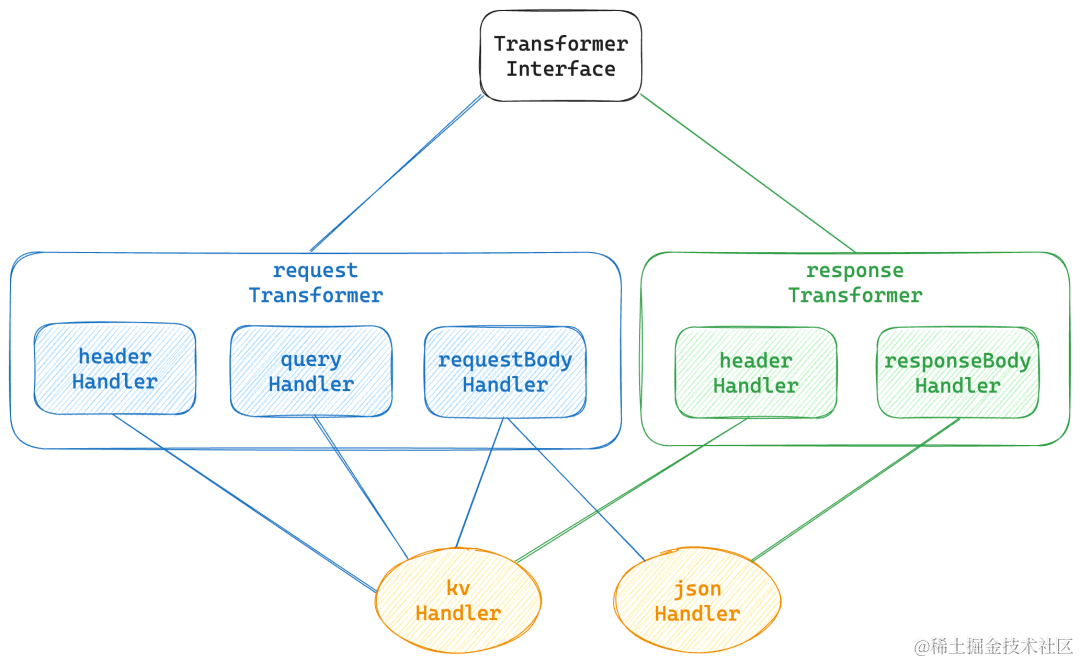
作者:韦鑫,Higress Committer,来自南京航空航天大学分布式系统实验室 导读:本文将和大家一同回顾 Spring Cloud Gateway 是如何满足 HTTP 请求/响应转换需求场景的,并为大家介绍在这种场景下使用 Higress 云原生网关的…...
0.618算法和基于Armijo准则的线搜索回退法
0.618代码如下: import math # 定义函数h(t) t^3 - 2t 1 def h(t): return t**3 - 2*t 1 # 0.618算法 def golden_section_search(a, b, epsilon): ratio 0.618 while (b - a) > epsilon: x1 b - ratio * (b - a) x2 a ratio * (b - a) h_…...
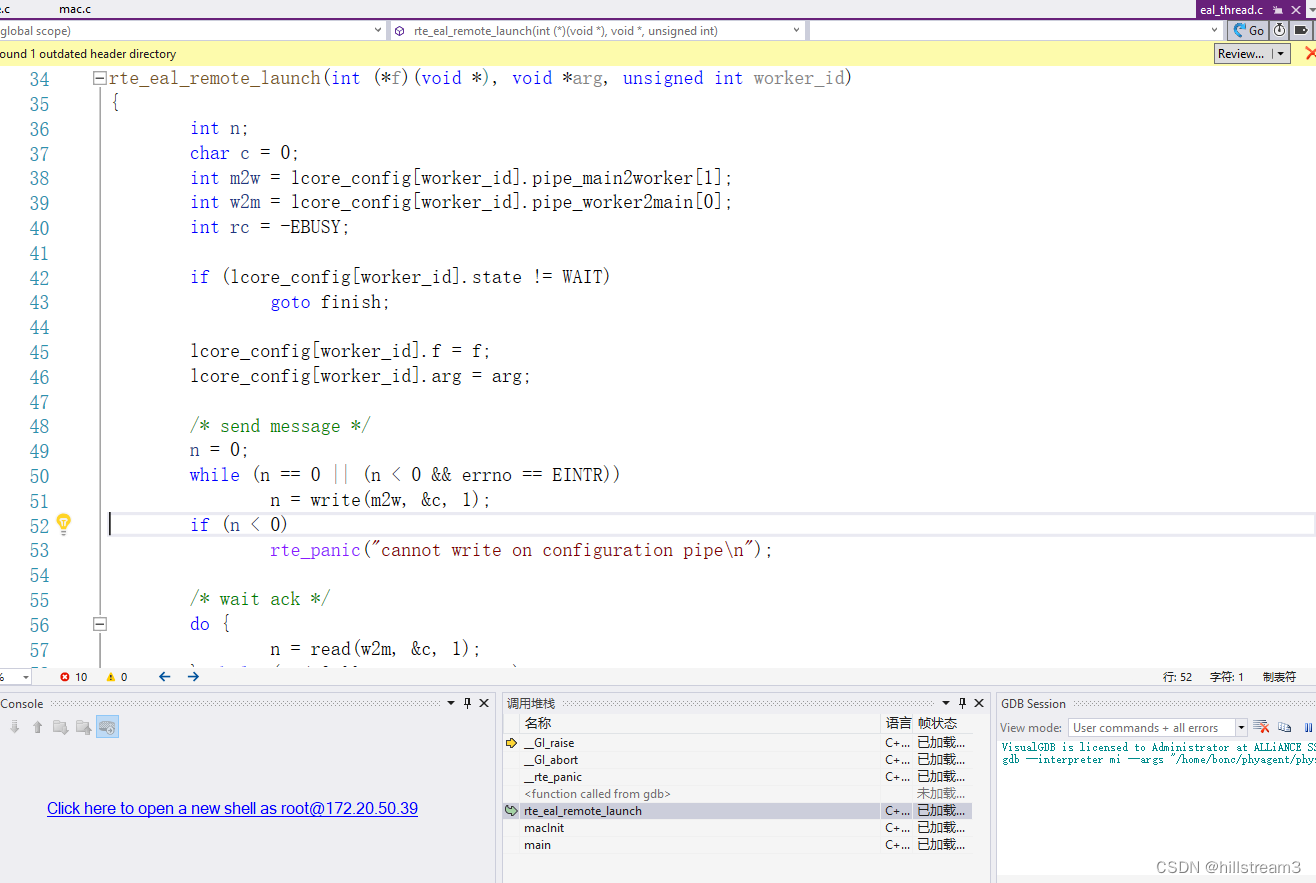
DPDK单步跟踪(3)-项目配置和单步跟踪
项目配置 下面都是示例的情况,请大家根据自己的工程来修改 ## 首先是配置CMake build setting Debug setting 这里最重要的是: –proc-type secondary 表示这是以secondary模式启动的dpdk客户端。 ## path mapping 然后根据自己的需要,配置…...

.NET core 自定义过滤器 Filter 实现webapi RestFul 统一接口数据返回格式
之前写过使用自定义返回类的方式来统一接口数据返回格式,.Net Core webapi RestFul 统一接口数据返回格式-CSDN博客 但是这存在一个问题,不是所有接口会按照定义的数据格式返回,除非每个接口都返回我们自定义的类,这种实现起来不…...

vue3 使用addRoute动态添加路由,页面刷新就白屏解决办法
问题,通过接口动态添加路由,第一次从登录页跳转还是正常的,说明路由添加成功了,但是刷新后就白屏了,且控制台报错路由匹配不到,在项目的main.js,router和路由拦截器中添加了一大堆打印后发现&am…...

探索鸿蒙:了解华为鸿蒙操作系统的基础课程
目录 学习目标: 学习内容: 学习时间: 学习产出: 介绍鸿蒙操作系统的起源和发展历程。 理解鸿蒙操作系统的核心概念和体系结构。 学习如何搭建和配置鸿蒙开发环境。 掌握基础的鸿蒙应用开发技术,包括应用的创建、…...
【Linux】进程周边007之进程控制
👀樊梓慕:个人主页 🎥个人专栏:《C语言》《数据结构》《蓝桥杯试题》《LeetCode刷题笔记》《实训项目》《C》《Linux》 🌝每一个不曾起舞的日子,都是对生命的辜负 目录 前言 1.进程创建 2.进程终止 2.…...
)
uniapp 对接腾讯云IM群组成员管理(增删改查)
UniApp 实战:腾讯云IM群组成员管理(增删改查) 一、前言 在社交类App开发中,群组成员管理是核心功能之一。本文将基于UniApp框架,结合腾讯云IM SDK,详细讲解如何实现群组成员的增删改查全流程。 权限校验…...

谷歌浏览器插件
项目中有时候会用到插件 sync-cookie-extension1.0.0:开发环境同步测试 cookie 至 localhost,便于本地请求服务携带 cookie 参考地址:https://juejin.cn/post/7139354571712757767 里面有源码下载下来,加在到扩展即可使用FeHelp…...

1688商品列表API与其他数据源的对接思路
将1688商品列表API与其他数据源对接时,需结合业务场景设计数据流转链路,重点关注数据格式兼容性、接口调用频率控制及数据一致性维护。以下是具体对接思路及关键技术点: 一、核心对接场景与目标 商品数据同步 场景:将1688商品信息…...

土地利用/土地覆盖遥感解译与基于CLUE模型未来变化情景预测;从基础到高级,涵盖ArcGIS数据处理、ENVI遥感解译与CLUE模型情景模拟等
🔍 土地利用/土地覆盖数据是生态、环境和气象等诸多领域模型的关键输入参数。通过遥感影像解译技术,可以精准获取历史或当前任何一个区域的土地利用/土地覆盖情况。这些数据不仅能够用于评估区域生态环境的变化趋势,还能有效评价重大生态工程…...
【数据分析】R版IntelliGenes用于生物标志物发现的可解释机器学习
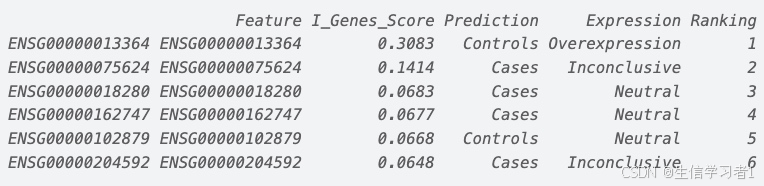
禁止商业或二改转载,仅供自学使用,侵权必究,如需截取部分内容请后台联系作者! 文章目录 介绍流程步骤1. 输入数据2. 特征选择3. 模型训练4. I-Genes 评分计算5. 输出结果 IntelliGenesR 安装包1. 特征选择2. 模型训练和评估3. I-Genes 评分计…...

CSS设置元素的宽度根据其内容自动调整
width: fit-content 是 CSS 中的一个属性值,用于设置元素的宽度根据其内容自动调整,确保宽度刚好容纳内容而不会超出。 效果对比 默认情况(width: auto): 块级元素(如 <div>)会占满父容器…...
排序算法总结(C++)
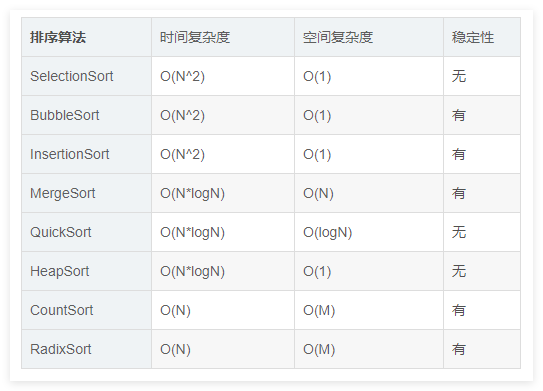
目录 一、稳定性二、排序算法选择、冒泡、插入排序归并排序随机快速排序堆排序基数排序计数排序 三、总结 一、稳定性 排序算法的稳定性是指:同样大小的样本 **(同样大小的数据)**在排序之后不会改变原始的相对次序。 稳定性对基础类型对象…...

Mysql8 忘记密码重置,以及问题解决
1.使用免密登录 找到配置MySQL文件,我的文件路径是/etc/mysql/my.cnf,有的人的是/etc/mysql/mysql.cnf 在里最后加入 skip-grant-tables重启MySQL服务 service mysql restartShutting down MySQL… SUCCESS! Starting MySQL… SUCCESS! 重启成功 2.登…...
)
【LeetCode】3309. 连接二进制表示可形成的最大数值(递归|回溯|位运算)
LeetCode 3309. 连接二进制表示可形成的最大数值(中等) 题目描述解题思路Java代码 题目描述 题目链接:LeetCode 3309. 连接二进制表示可形成的最大数值(中等) 给你一个长度为 3 的整数数组 nums。 现以某种顺序 连接…...

Modbus RTU与Modbus TCP详解指南
目录 1. Modbus协议基础 1.1 什么是Modbus? 1.2 Modbus协议历史 1.3 Modbus协议族 1.4 Modbus通信模型 🎭 主从架构 🔄 请求响应模式 2. Modbus RTU详解 2.1 RTU是什么? 2.2 RTU物理层 🔌 连接方式 ⚡ 通信参数 2.3 RTU数据帧格式 📦 帧结构详解 🔍…...