MATLAB - 机器人逆运动学设计器(Inverse Kinematics Designer APP)
系列文章目录
前言
一、简介
通过逆运动学设计器,您可以为 URDF 机器人模型设计逆运动学求解器。您可以调整逆运动学求解器并添加约束条件,以实现所需的行为。使用该程序,您可以
- 从 URDF 文件或 MATLAB 工作区导入 URDF 机器人模型。
- 调整逆运动学求解器和约束条件。
- 创建关节配置并导出航点。
- 将求解器设置、约束和关节配置导出到 MATLAB® 工作区。
二、打开 Inverse Kinematics Designer App
- MATLAB 工具条: 在 "应用程序 "选项卡上的 "机器人和自主系统 "下,单击 "逆运动设计器 逆运动设计器 "图标。
- MATLAB 命令提示符: 输入 inverseKinematicsDesigner。
三、示例
3.1 创建逆运动学设计器
本示例演示了如何创建、加载和保存逆运动设计器会话,以及如何将机器人加载到会话中。完成文件作为 iksessiondata.mat 附后,以供参考。使用 inverseKinematicsDesigner 函数加载会话,或按照本示例创建会话。
3.1.1 创建
使用 inverseKinematicsDesigner 函数打开逆运动设计器。
inverseKinematicsDesigner
3.1.2 加载机器人模型
在命令窗口中使用 loadrobot 将刚体树(如 Universal UR5e)加载到工作区。importrobot 也可用于从任何机器人 URDF 文件中导入刚体树对象。
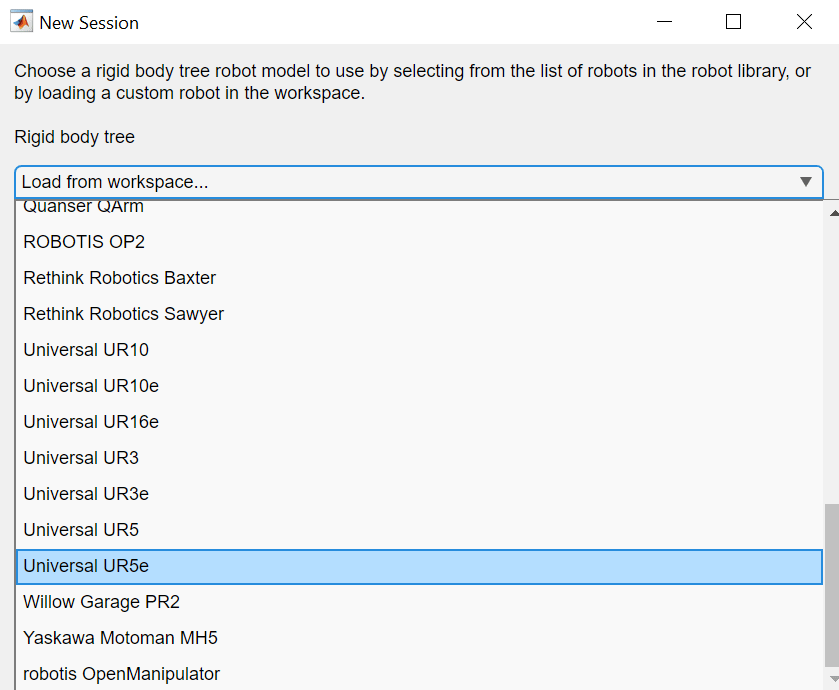
uniUR5e = loadrobot("universalUR5e");单击 "新建会话",从对话框的表格中选择 uniUR5e,然后单击 "确定"。该表包含工作区中的所有刚体树对象。如果在表中没有看到您的对象,请确认该对象是否在工作区中,然后单击 "刷新"。
或者,您也可以使用刚体树下拉菜单,从机器人系统工具箱(Robotics System Toolbox™)附带的机器人模型列表中进行选择,然后单击 "确定",加载一个机器人。
现在,"场景画布 "包含机器人模型,"场景浏览器 "显示机器人的所有刚体。

3.1.3 添加碰撞对象
要在 "场景画布 "中添加碰撞对象,工作区中必须有一个碰撞对象。为方便起见,本示例提供了一个简单的方框供您使用。有关创建碰撞对象的更多信息,请参阅 collisionMesh、collisionBox、collisionSphere 和 collisionCylinder。
加载 collisionobject MAT 文件,将名为 box 的 collisionBox 保存到工作区。单击 "添加碰撞对象",然后从表格中选择 box。单击 "确定 "将其添加到 "场景画布 "中。

现在,"场景画布 "中包含了机器人和碰撞对象。在本示例中,我们将保留该对象,但如果要删除碰撞对象,请在场景浏览器中的场景下找到碰撞对象,右键单击碰撞对象的名称并单击删除。
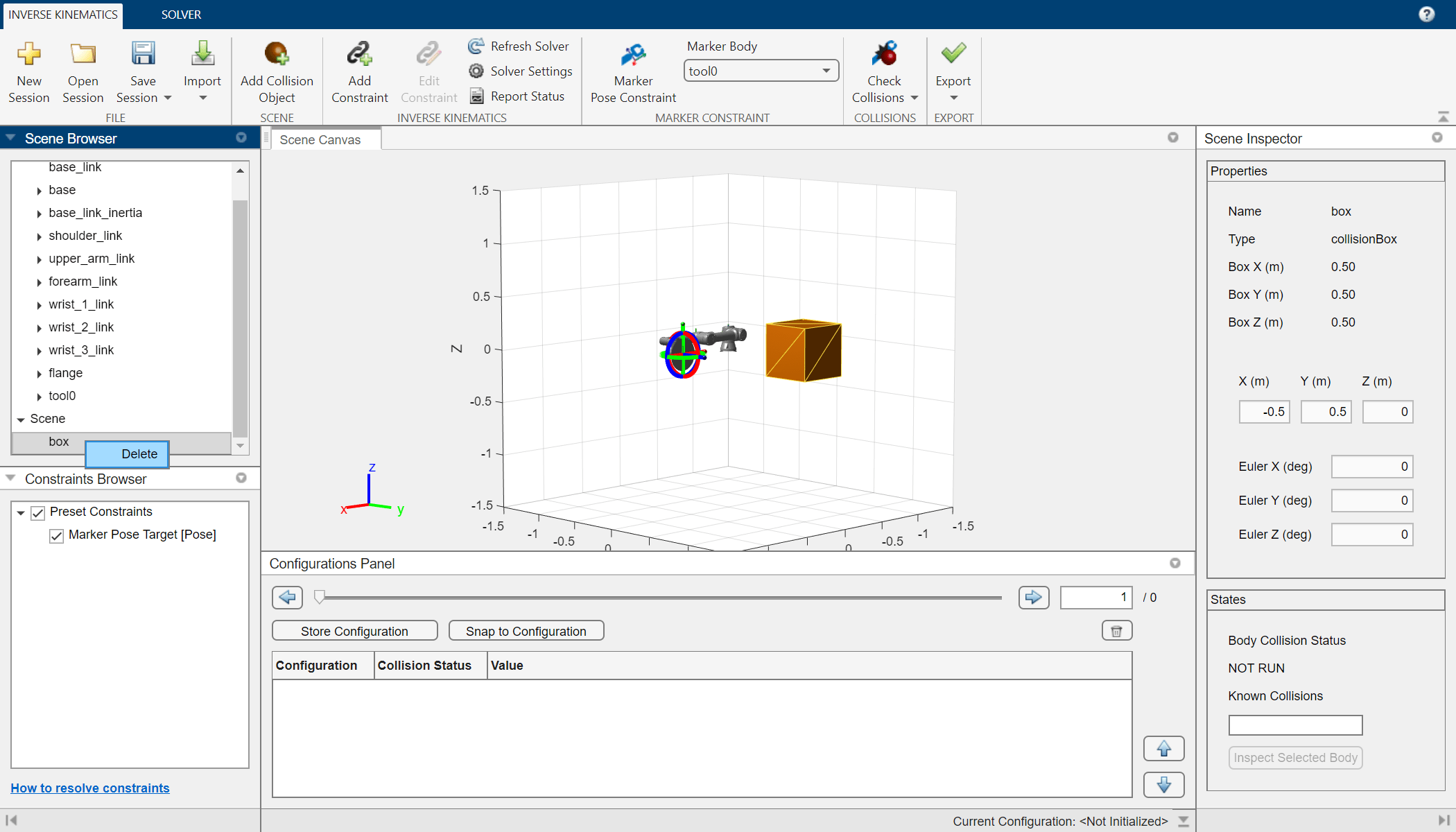
在 "场景画布 "或 "场景浏览器 "中选择对象时,可使用 "场景检查器 "查看对象的位置和欧拉方位。列出的属性将根据所选碰撞对象的类型而改变。
3.1.4 保存会话
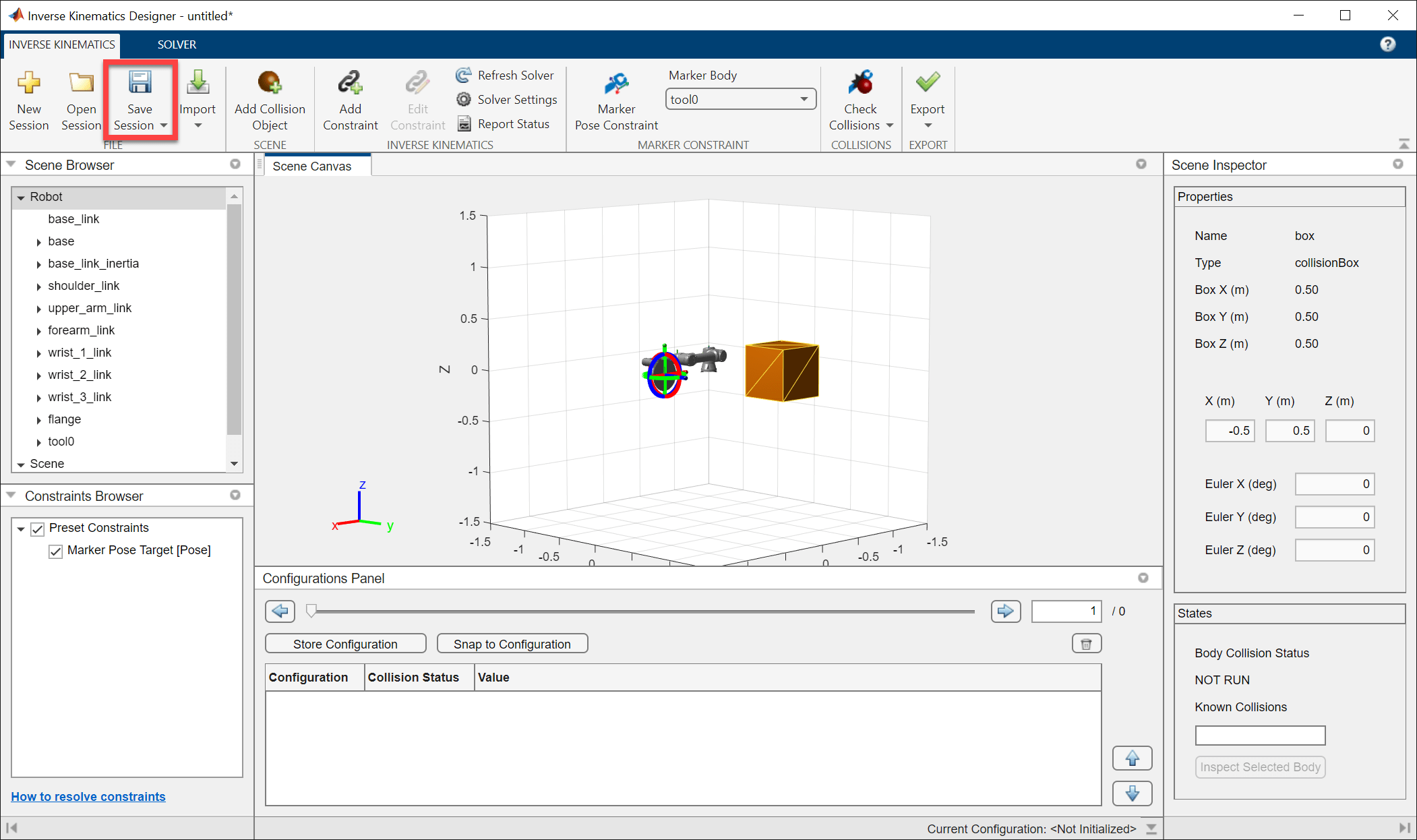
要保存此会话,请单击 "保存会话"。如果这是第一次保存会话,请命名文件并选择保存位置。文件将保存为包含所有会话数据和设置的 MAT (*.mat) 文件。
3.1.5 加载保存的会话
要加载会话文件,请单击 "Inverse Kinematics Designer(逆运动设计器)"应用程序中的 "Open Session(打开会话)",或以字符串形式向 inverseKinematicsDesigner 指定 MAT 文件。本示例中提供的会话示例为 iksessiondata.mat。
inverseKinematicsDesigner("iksessiondata.mat") 
3.2 使用 "场景画布 "并移动机器人
本示例演示如何使用场景画布,并使用逆运动设计器应用程序在其中移动机器人。
加载现有会话 (ixsessiondata.mat),或参考创建逆运动设计器会话示例创建会话。
inverseKinematicsDesigner
3.2.1 场景画布控件
使用场景画布中的轴工具栏控制视图。

要旋转场景画布,请选择旋转 3D 按钮并在场景中单击和拖动。
单击 "平移 "按钮,然后在场景中单击并拖动,即可在 "场景画布 "中平移。
选择 "放大 "或 "缩小 "按钮,然后单击并向上或向下拖动,可分别放大或缩小场景画布内的某个区域。
单击 "恢复视图 "按钮可恢复到原始默认视图。
3.2.2 移动机器人
使用预设的 "标记姿势目标 "约束等约束条件移动机器人。标记姿势目标约束是移动机器人最简单的约束。该约束在机器人模型的最后一个体上设置目标姿势。在本例中,标记体被设置为工具 0。在 "场景画布 "中,通过红色、绿色和蓝色的线性和圆形指示符,可视化所选标记体顶部的标记。单击并拖动线性或圆形指示符将分别改变目标位置和欧拉方向。颜色与 "场景画布 "左下方显示的坐标轴颜色相对应。
单击 "标记姿势约束 "打开 "约束 "选项卡。在 "约束 "选项卡中,设置以米为单位的笛卡尔位置、以度为单位的欧拉方向,以及位置和方向的权重和公差。标记体可以在 "约束 "选项卡的 "末端执行体 "列表或 "逆运动学 "选项卡的 "标记体 "列表中更改。单击 "应用 "保存任何更改,单击 "关闭约束 "退出 "约束 "选项卡。请注意,指定的欧拉角是使用 XYZ 序列计算的。

还可以通过清除或选择 "约束浏览器 "中 "标记姿势目标 "约束旁边的复选框来打开或关闭 "标记姿势目标 "约束。
3.2.3 解决方案详情
移动 "目标标记姿势 "时,会设置目标姿势,逆运动学求解器会求解所选标记体到达目标姿势的配置。如果找不到目标姿势的解决方案,机器人将移动到最佳可用解决方案,而标记体将不会移动到标记姿势目标。这种解决方案可以通过 "约束浏览器 "中的约束图标直观地识别出来。图标上的红色 x 表示未满足约束条件,而绿色复选框则表示正在满足约束条件。
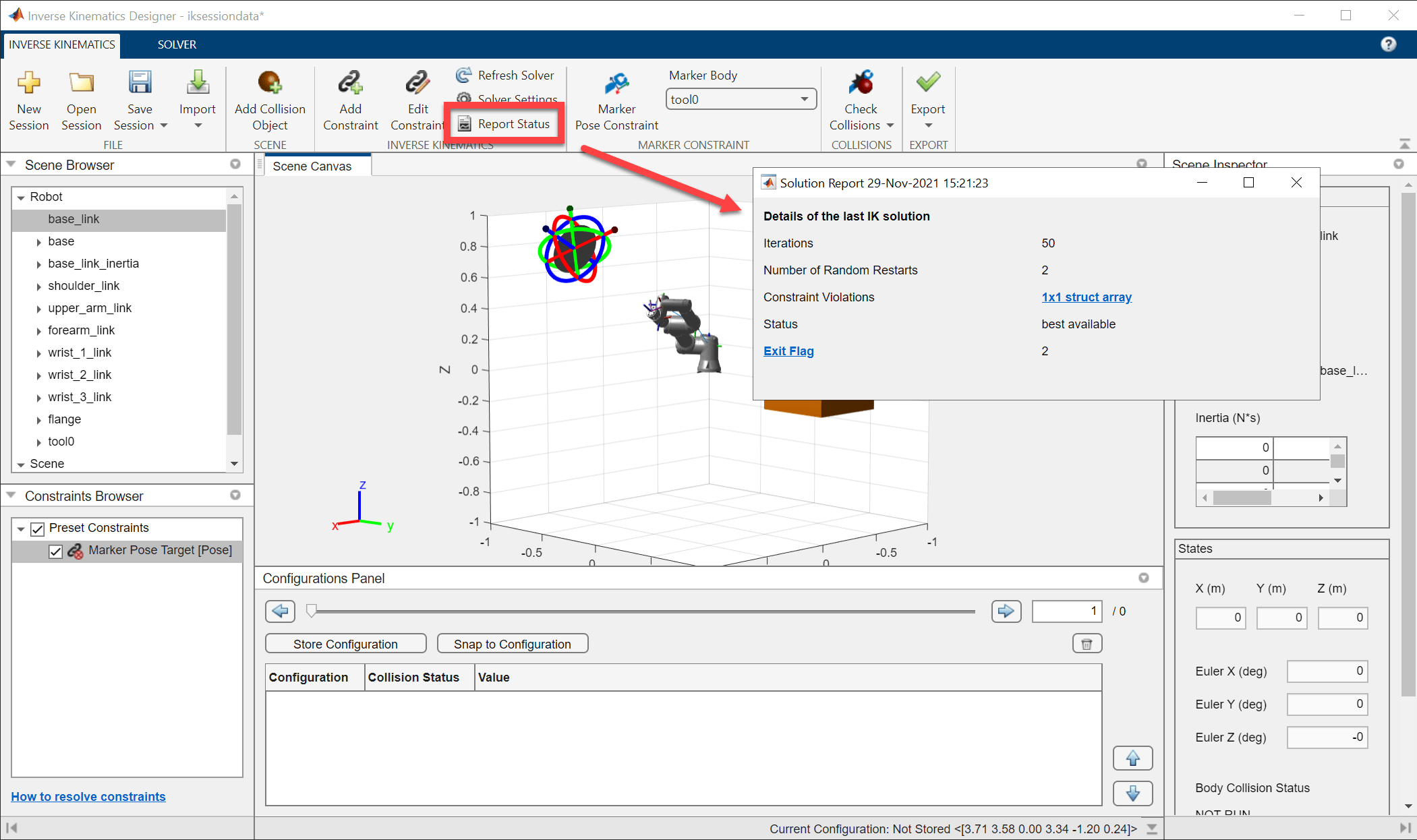
要了解求解器未能求解的更多信息,请单击 "报告状态 "查看求解器求解的详细信息。迭代次数和随机重启次数分别列出求解器执行的次数。违反约束条件"(Constraints Violations)显示了可在命令窗口中显示的所有冲突的结构数组。如果求解器成功求解出目标姿态,状态将显示成功;如果求解器无法求解出目标姿态,则显示其找到的最佳可用解。退出标志(Exit Flag)提供了特定求解器算法执行的更多细节。有关不同退出标志类型的更多信息,请参阅 "逆运动学算法"。
要排除求解器无法求解的原因,请参阅 "解决约束冲突 "了解一些技巧。
3.3 创建无碰撞配置并输出航点
本示例演示如何使用逆运动设计器创建关节配置,并使用场景检查器检查碰撞。本示例使用了 "创建逆运动设计器会话 "和 "使用场景画布和移动机器人 "中的数据和技能。在继续之前,请参考这些示例。
3.3.1 加载会话
使用 inverseKinematicsDesigner 和 iksessiondata.mat 会话文件,在场景中加载具有基本碰撞对象的机器人。
inverseKinematicsDesigner
3.3.2 创建配置
使用配置面板创建、修改和查看配置。
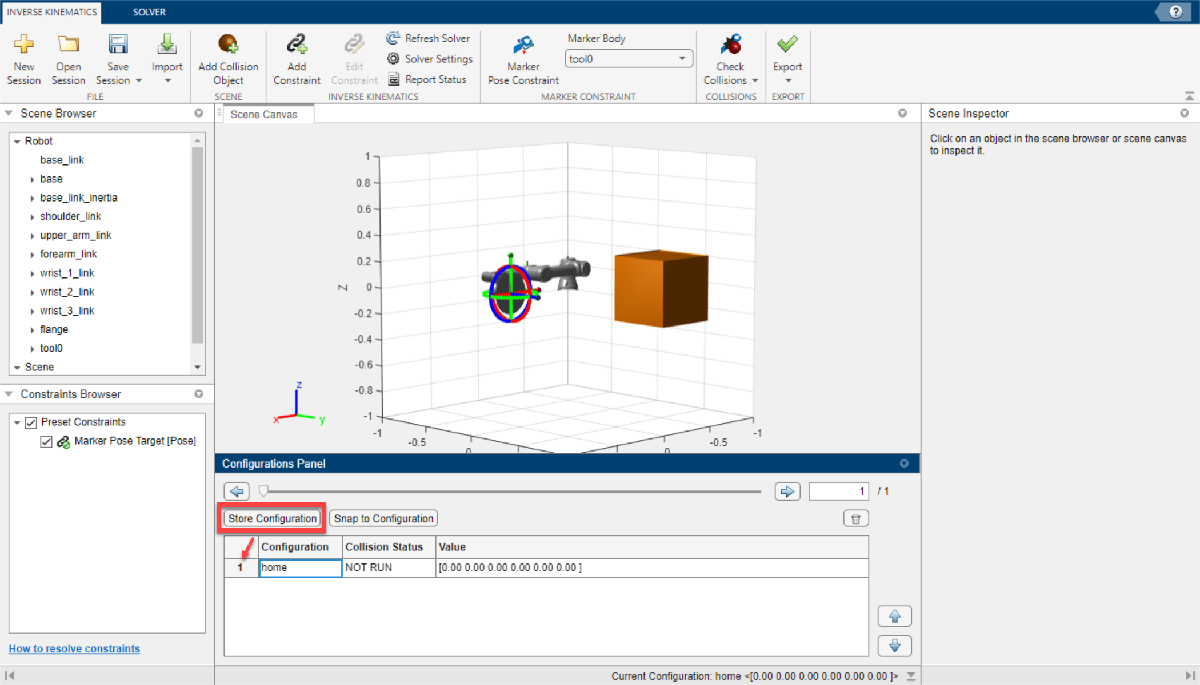
在移动机器人之前,单击 "存储配置 "保存机器人当前的关节配置,如场景画布所示。这将把配置添加到 "配置面板 "的表格中,其中包含默认配置名称、碰撞状态和每个关节的矢量值。双击相应元素可编辑每个配置的名称和值。将此配置重命名为 home,并将其值保留为 [0.00 0.00 0.00 0.00 0.00 0.00 0.00]。
创建另一个配置,但这次要使其与方框相撞。使用 "标记姿势约束 "将末端执行器设置为[-0.5 0.5 0]处的方框中心,然后存储配置。要在多个配置之间切换视图,请选择一个配置,单击 "捕捉到配置 "或单击 "向前或向后步进 "按钮,以步进方式切换当前配置。

3.3.3 检查碰撞
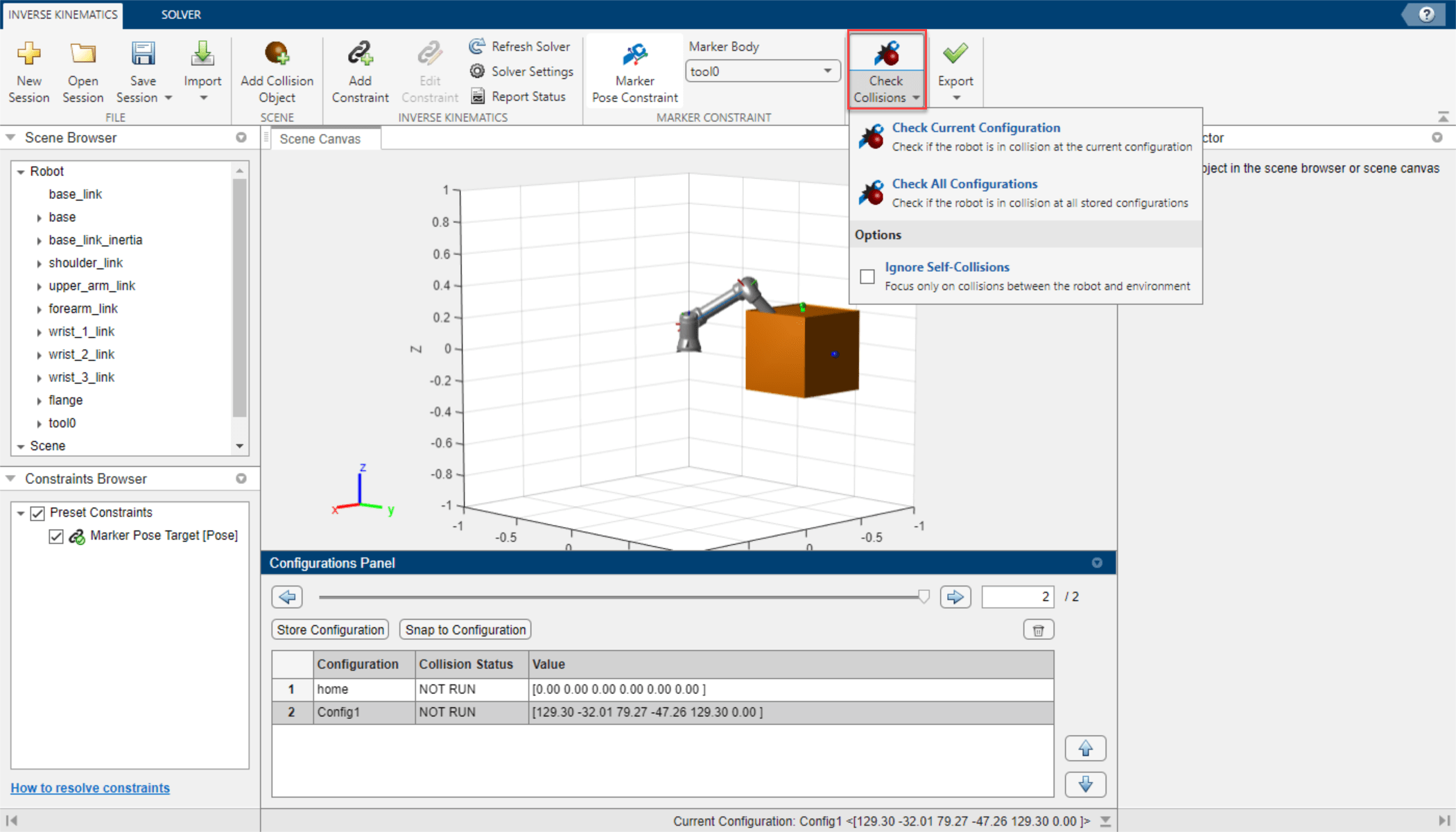
单击检查碰撞 > 检查所有配置更新所有存储配置的碰撞状态。要检查一个配置,请选择所需的配置,单击 "捕捉到配置",然后单击 "检查碰撞">"检查当前配置 "更新当前所选配置的碰撞状态。
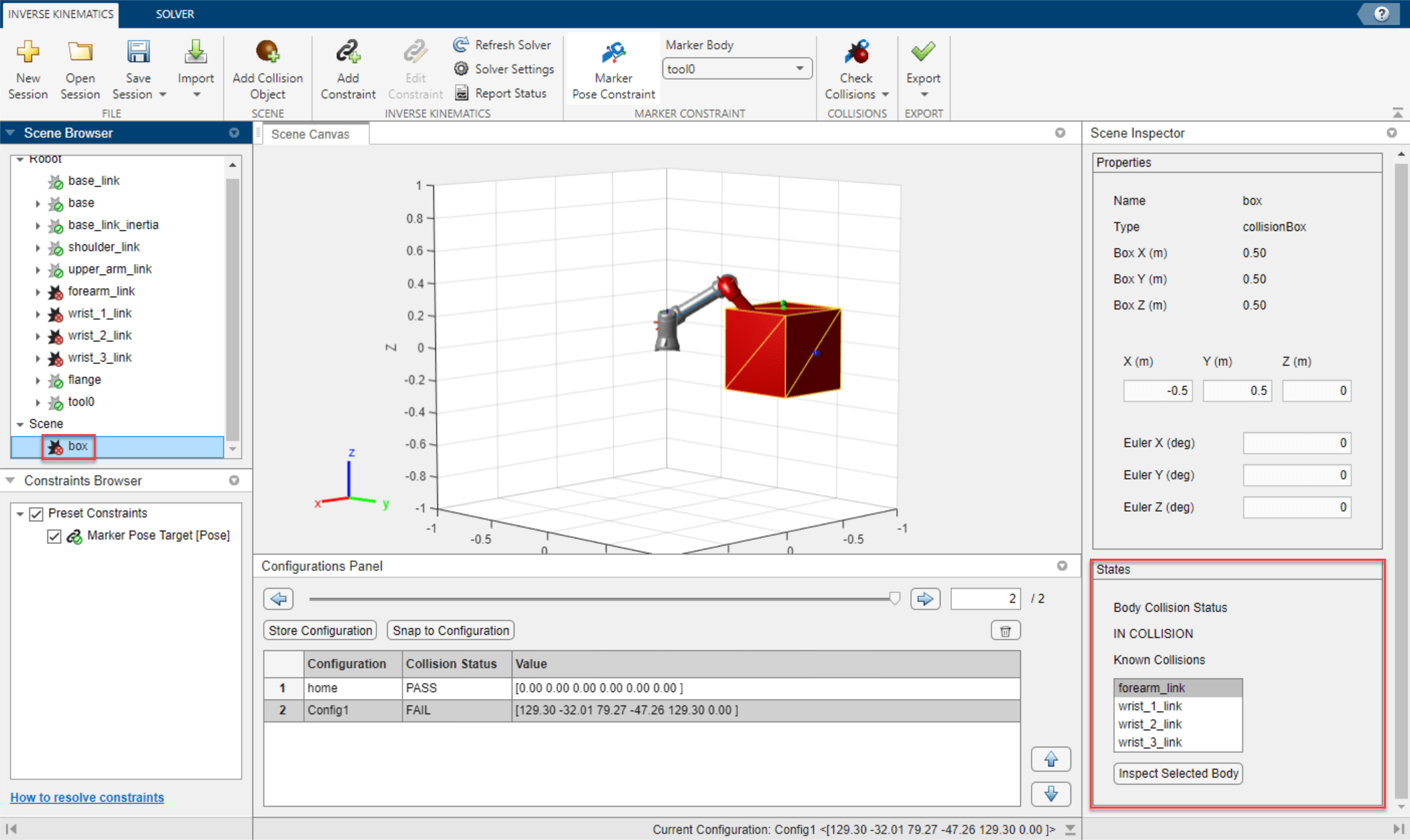
碰撞检查完成后,第一个和第二个配置的碰撞状态分别为 PASS 和 FAIL。选择碰撞检查失败的配置。场景浏览器中选定配置的主体会更新,显示红色 x 或绿色检查图标,分别表示该主体处于碰撞状态或无碰撞状态。在场景画布中,标记为 "碰撞中 "的体也将以红色高亮显示。请注意,法兰和工具 0 虽然看起来在位置上处于碰撞状态,但却被标记为无碰撞状态。这是因为这些机构只是框架,不包含碰撞网格。如果您打算检查碰撞,请在导入任何机器人之前确保机器人的实体包含碰撞网格。

在 "场景浏览器 "或 "场景画布 "中单击该框,选择该框,然后检查 "状态 "窗格。状态 "窗格包含位置、方向、碰撞状态以及自上次碰撞检查以来所有已知碰撞的列表。已知碰撞列表显示了与所选体发生碰撞的所有体。从列表中选择任何一个车身并单击 "检查选定车身",场景检查器就会切换到该本体。
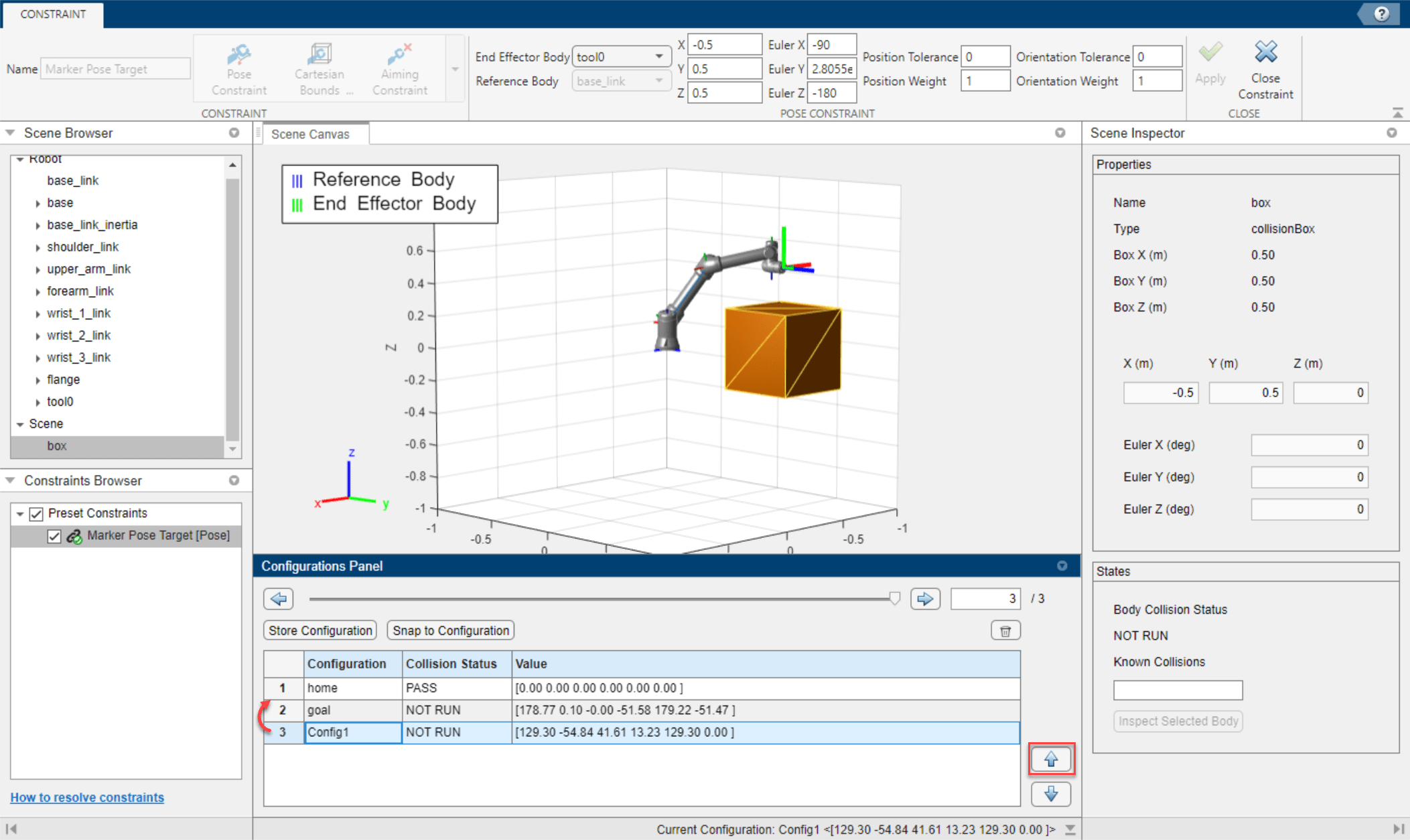
3.3.4 创建配置路径
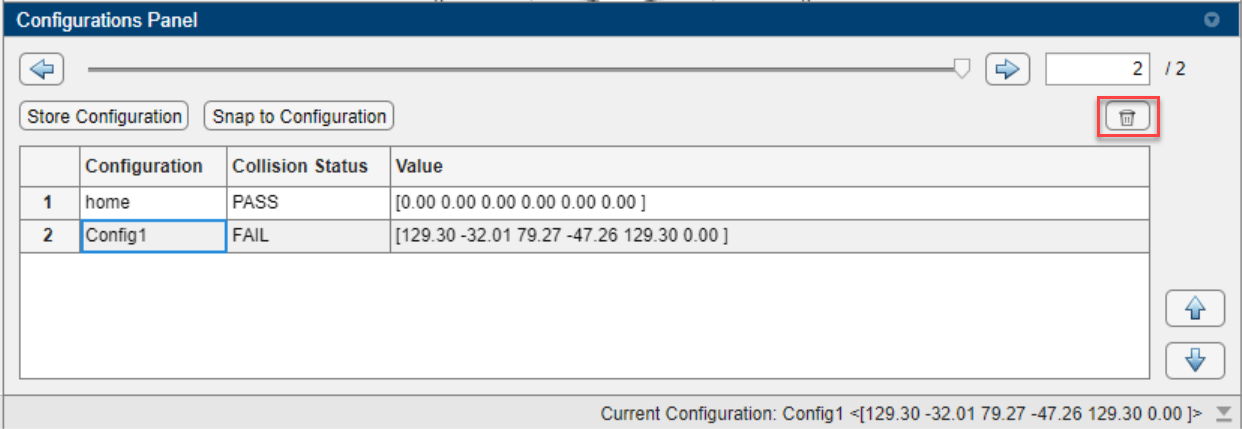
要创建路径,请按顺序依次向表中添加配置。由于第二个配置与方框冲突,因此选择它并单击删除。
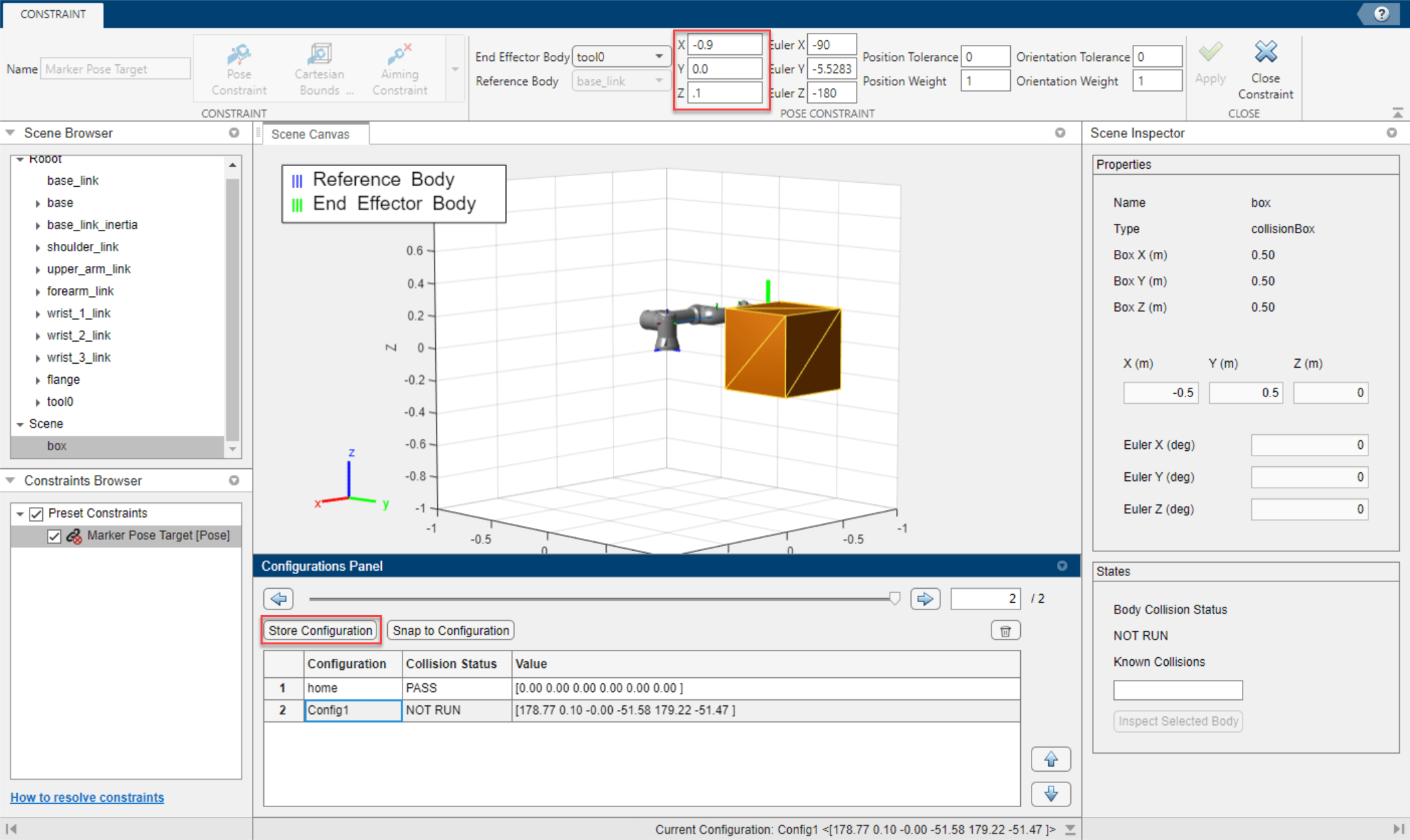
将目标标记姿态设置为方框后 [-0.9 0.0 0.1],并存储配置。该配置将成为目标配置,因此将其重命名为目标。
捕捉到 "原点 "配置,并在[-0.5 0.5 0.5]处的方框上添加一个额外配置,作为 "原点 "和 "目标 "之间的中间配置。如果需要修改配置,请捕捉到该配置,调整目标标记姿势,保存新配置并删除旧配置。单击 "移动配置 "按钮,在原点和目标配置之间移动新配置。
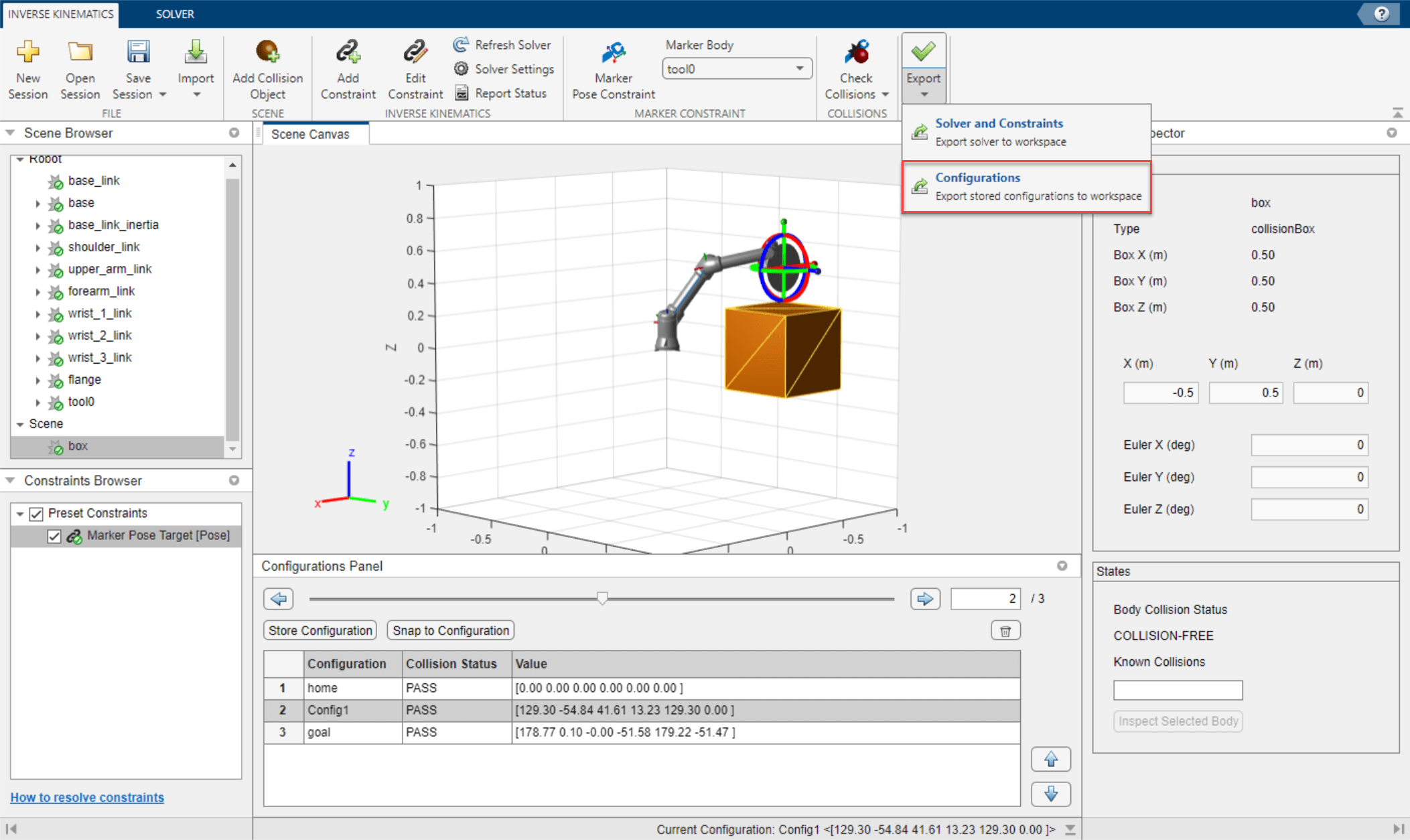
单击检查碰撞 > 检查所有配置检查所有配置是否发生碰撞。如果某个配置未通过,请进行必要的调整。
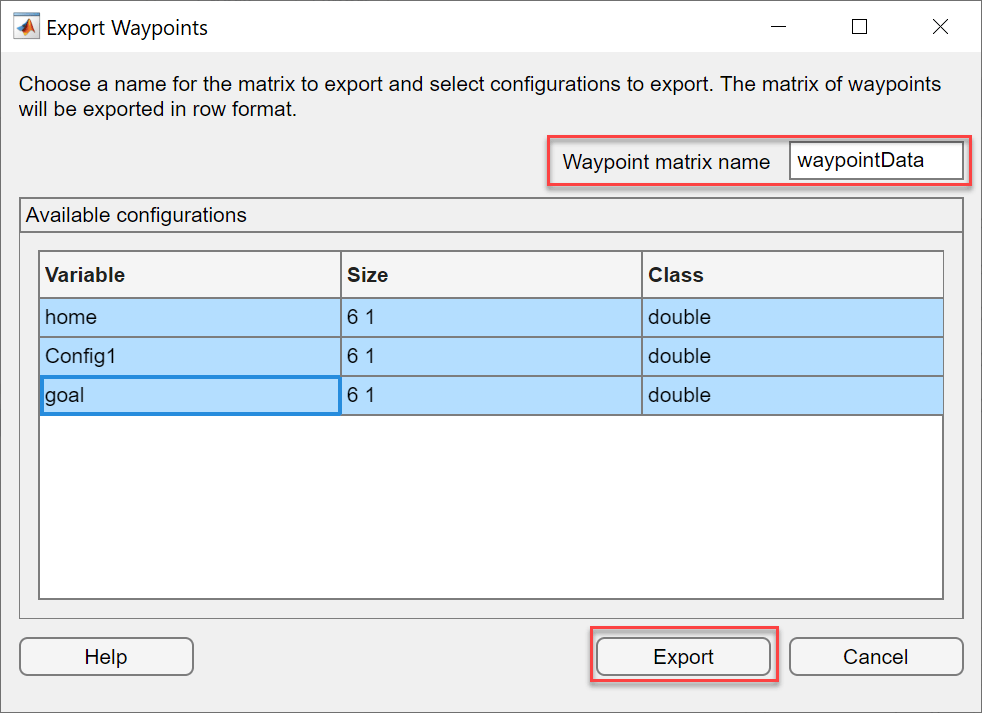
3.3.5 将配置导出为航点
保存会话也会保存会话中存储的配置,但要将配置作为航点导出到 MATLAB™ 工作区,请单击导出 > 配置。选择要导出的所有配置,在航点矩阵名称中指定航点矩阵的名称,然后单击导出。检查工作区中是否有包含航点的矩阵。请注意,航点矩阵的大小取决于导出配置的数量和机器人关节的数量,并将以行格式导出。本例中的航点矩阵尺寸为 3x6。
相关文章:
MATLAB - 机器人逆运动学设计器(Inverse Kinematics Designer APP)
系列文章目录 前言 一、简介 通过逆运动学设计器,您可以为 URDF 机器人模型设计逆运动学求解器。您可以调整逆运动学求解器并添加约束条件,以实现所需的行为。使用该程序,您可以 从 URDF 文件或 MATLAB 工作区导入 URDF 机器人模型。调整逆…...
使用OpenCV DNN模块进行人脸检测
内容的一部分来源于贾志刚的《opencv4应用开发、入门、进阶与工程化实践》。这本书我大概看了一下,也就后面几章比较感兴趣,但是内容很少,并没有想像的那种充实。不过学习还是要学习的。 在实际工程项目中,并不是说我们将神经网络…...

C#中使用OpenCV的常用函数
以下是一些C#中使用OpenCV的常用函数例子: 1. 加载图像: using OpenCvSharp;Mat image Cv2.ImRead("path_to_your_image.jpg", ImreadModes.Color); 2. 显示图像: Cv2.NamedWindow("Image Window", WindowFlags.Nor…...
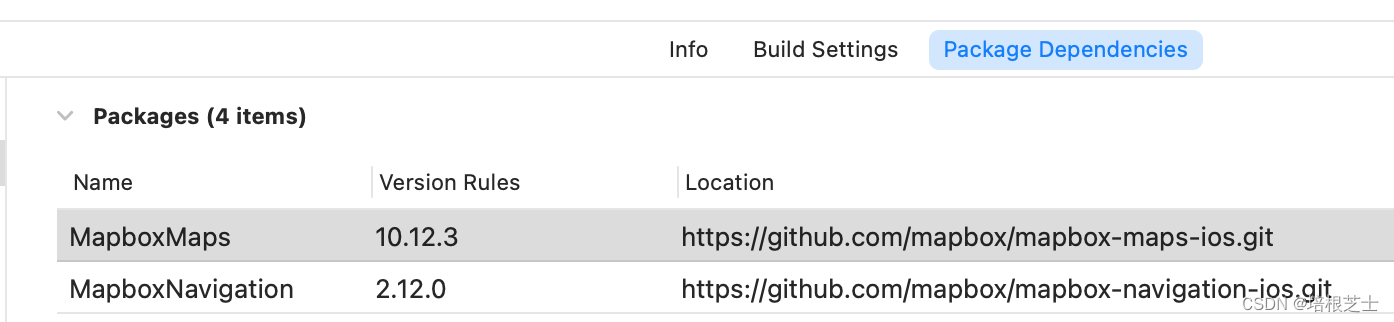
使用Swift Package Manager (SPM)实现xcframework分发
Swift Package Manager (SPM) 是苹果官方提供的用于管理 Swift 项目的依赖关系和构建过程的工具。它是一个集成在 Swift 编程语言中的包管理器,用于解决在开发过程中管理和构建包依赖项的需求。 1、上传xcframework.zip到服务端 压缩xcframeworks成一个zip包&…...
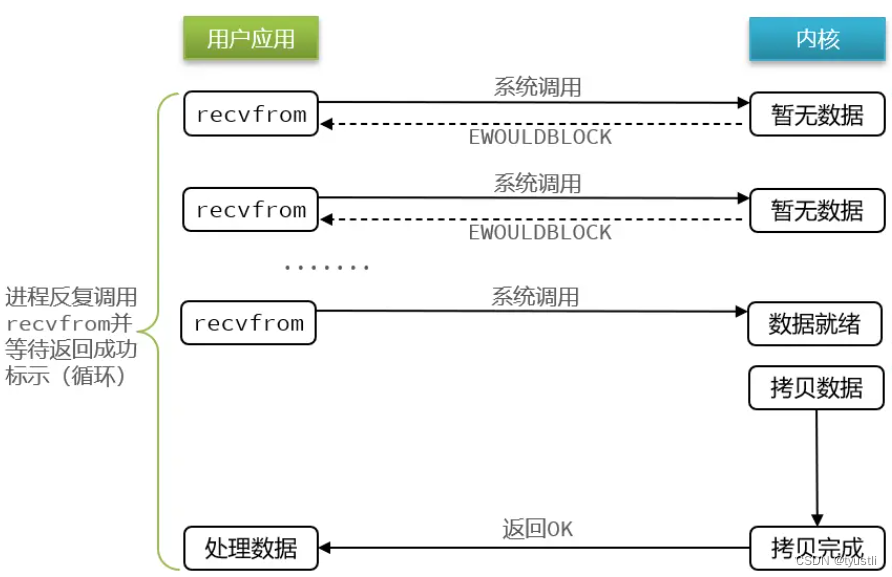
非阻塞 IO(NIO)
文章目录 非阻塞 IO(NIO)模型驱动程序应用程序模块使用 非阻塞 IO(NIO) 上一节中 https://blog.csdn.net/tyustli/article/details/135140523,使用等待队列头实现了阻塞 IO 程序使用时,阻塞 IO 和非阻塞 IO 的区别在于文件打开的时候是否使用了 O_NONB…...

Android应用-flutter使用Positioned将控件定位到底部中间
文章目录 场景描述示例解释 场景描述 要将Positioned定位到屏幕底部中间的位置,你可以使用MediaQuery来获取屏幕的高度,然后设置Positioned的bottom属性和left或right属性,一般我们left和right都会设置一个值让控制置于合适的位置࿰…...
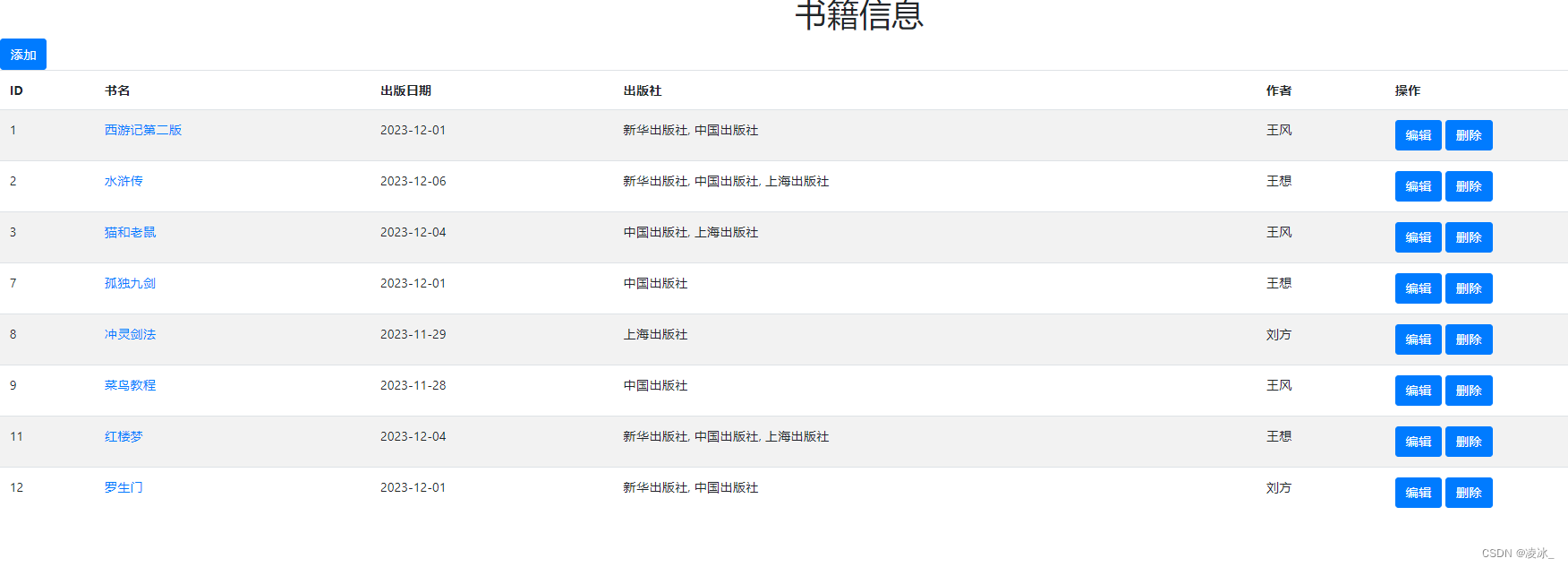
Django 简单图书管理系统
一、图书需求 1. 书籍book_index.html中有超链接:查看所有的书籍列表book_list.html页面 2. 书籍book_list.html中显示所有的书名,有超链接:查看本书籍详情book_detail.html(通过书籍ID)页面 3. 书籍book_detail.html中书的作者和出版社&…...
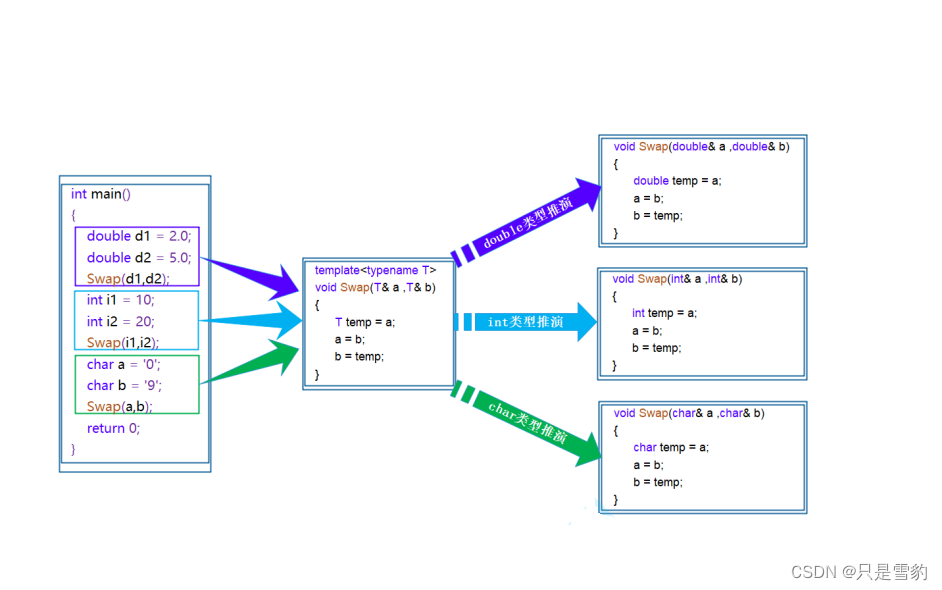
C++内存管理和模板初阶
C/C内存分布 请看代码: int globalVar 1; static int staticGlobalVar 1; void Test() {static int staticVar 1;int localVar 1;int num1[10] { 1, 2, 3, 4 };char char2[] "abcd";const char* pChar3 "abcd";int* ptr1 (int*)mallo…...
分布式对象远程通信)
QtRO(Qt Remote Objects)分布式对象远程通信
一、什么是QtRO Qt Remote Objects(QRO)是Qt提供的一种用于实现远程对象通信的机制。 QtRO支持两种类型的通信:RPC(远程过程调用)和LPC(本地进程通信)。 RPC(远程过程调用…...
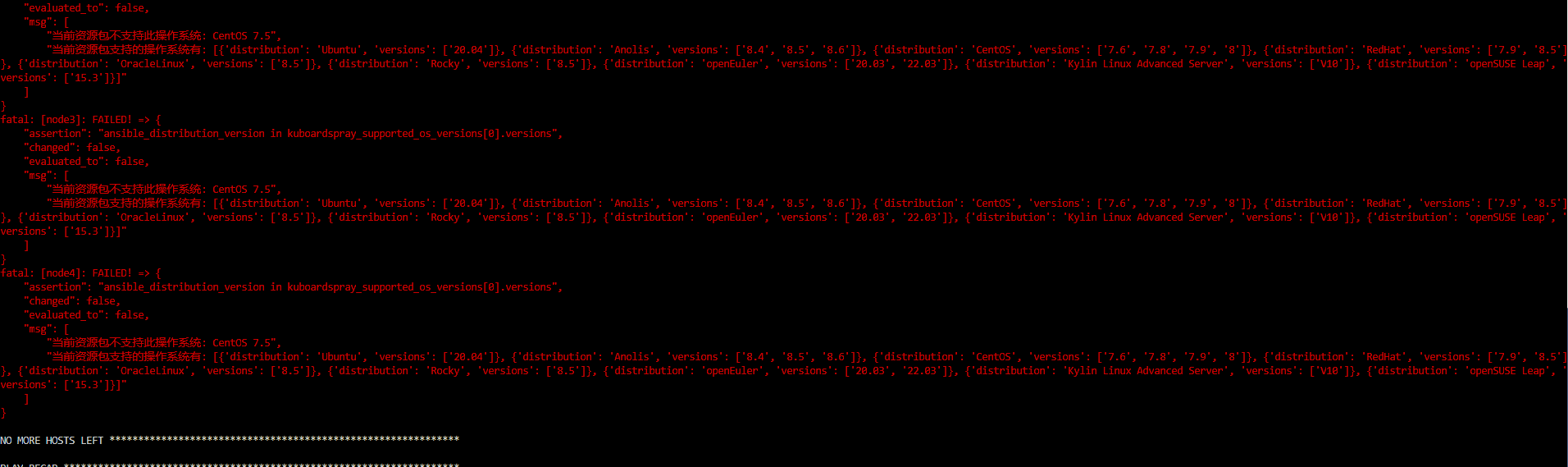
【K8s】1# 使用kuboard-spray安装K8s集群
文章目录 搭建k8s集群1.推荐配置1.1.服务器配置1.2.软件版本 2.使用Kuboard-Spray安装k8s集群2.1.配置要求2.2.操作系统兼容性2.3.安装 Kuboard-Spray2.4.加载离线资源包2.5.规划并安装集群2.6.安装成功2.7.访问集群 3.涉及的命令3.1.linux 4.问题汇总Q1:启动离线集…...

leetCode算法—12. 整数转罗马数字
12. 整数转罗马数字 难度:中等 ** 罗马数字包含以下七种字符: I, V, X, L,C,D 和 M。 字符 数值 I 1 V 5 X 10 L 50 C 100 D 500 M 1000 例如, 罗马数字 2 写做 II ,即…...
使用OpenCV4实现工业缺陷检测的六种方法
目录 1 机器视觉2 缺陷检测3 工业上常见缺陷检测方法 1 机器视觉 机器视觉是使用各种工业相机,结合传感器跟电气信号实现替代传统人工,完成对象识别、计数、测量、缺陷检测、引导定位与抓取等任务。其中工业品的缺陷检测极大的依赖人工完成,…...
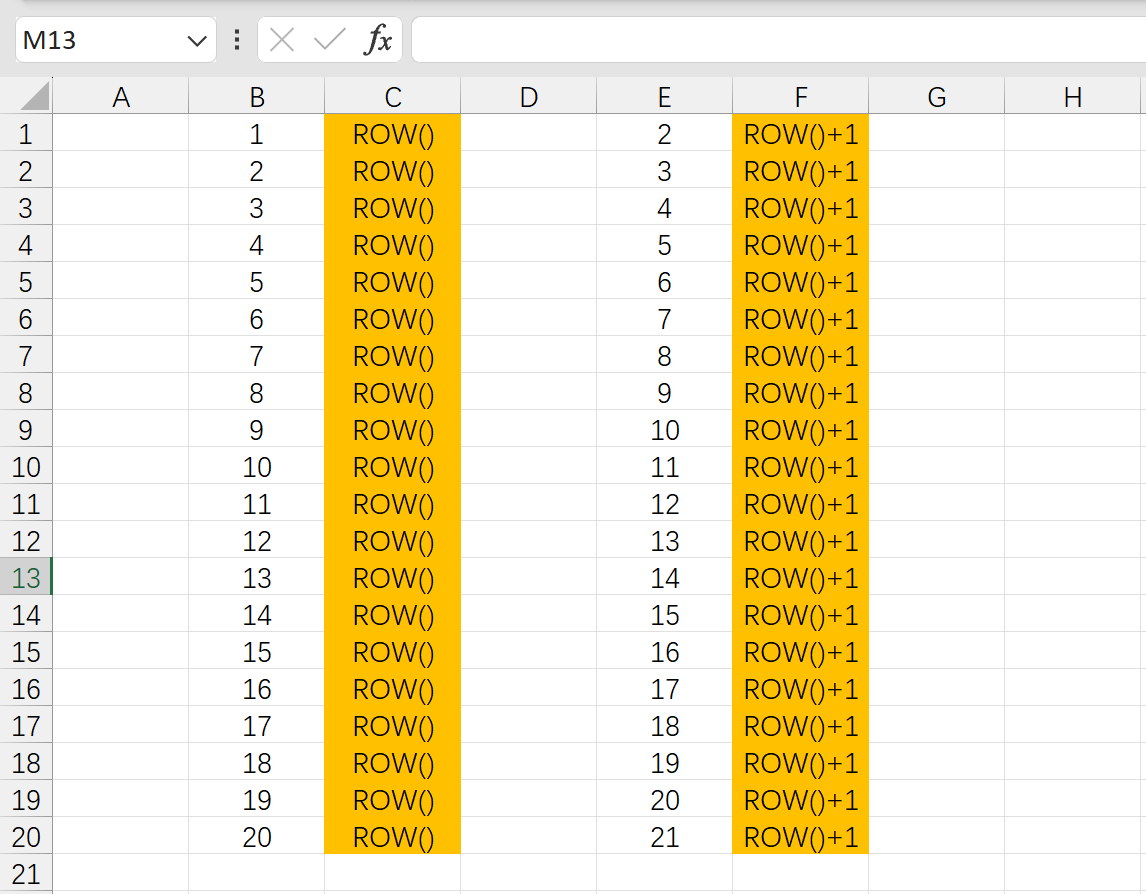
Excel 获取当前行的行数
ROW() 获取当前行 ROW()1 获取当前行然后支持二次开发...

R语言【stringr】——str_detect 检测是否存在字符串的匹配项
Package stringr version 1.5.1 str_detect(string, pattern, negate FALSE) 参数【string】:输入向量。既可以是字符向量,也可以是强制作为一个字符向量。 参数【pattern】:要寻找的模式。默认解释为正则表达式,如 vignette(&…...
【SpringMVC】SpringMVC的请求与响应
文章目录 0. Tomcat环境的配置1. PostMan工具介绍创建WorkSpace建立新的请求 2. 请求映射路径案例结构与代码案例结构案例代码 案例存在问题解决方案方法方法升级版——配置请求路径前缀注解总结 3. Get请求与Post请求案例结构与案例代码案例结构案例代码 Get请求Post请求接收中…...

Spring Boot3通过GraalVM生成exe执行文件
一、安装GraalVM 1、官网:https://www.graalvm.org/downloads/ 2、配置环境变量 2.1、环境变量必须使用JAVA_HOME,否则会出现问题 2.2、在系统变量配置Path,%JAVA_HOME%\bin,注意必须放在顶部第一位 2.3、配置jdk的环境变量,在P…...

【Amazon 实验②】使用缓存策略及源请求策略,用于控制边缘缓存的行为及回源行为
文章目录 1. 了解缓存策略和源请求策略1.1 使用缓存键和缓存策略 实验:使用CloudFront缓存策略和缓存键控制缓存行为 接上一篇文章【Amazon 实验①】使用 Amazon CloudFront加速Web内容分发,我们现在了解和配置如何使用缓存策略及源请求策略,…...

达梦数据对比工具的部署与使用
1、拷贝达梦软件bin目录到Oracle服务器(root用户) 压缩Linux rh6 x86版本的达梦数据库bin目录,例如压缩文件为dmbin.tar.gz,将文件拷贝到Oracle服务器指定目录并解压(如:/home/oracle/dmbin)&a…...

TLC2543(12位A/D转换器)实现将输入的模拟电压显示到数码管上
代码: #include <reg51.h> #define uchar unsigned char #define uint unsigned int// 数码管0-9 unsigned char seg[] {0x3F, 0x06, 0x5B, 0x4F, 0x66, 0x6D, 0x7D, 0x07, 0x7F, 0x6F}; sbit SDO P1^0; sbit SDI P1^1; sbit CS P1^2; sbit CLK P1^3; s…...

npm的使用技巧
以下是一些NPM(Node Package Manager)的使用技巧: 1. **获取帮助**: - 使用 npm help 或者 npm <command> --help 可以获取关于特定命令的帮助信息。 2. **命令自动完成**: - 在 Bash、Zsh 等 shell 中&…...

K8S认证|CKS题库+答案| 11. AppArmor
目录 11. AppArmor 免费获取并激活 CKA_v1.31_模拟系统 题目 开始操作: 1)、切换集群 2)、切换节点 3)、切换到 apparmor 的目录 4)、执行 apparmor 策略模块 5)、修改 pod 文件 6)、…...

java 实现excel文件转pdf | 无水印 | 无限制
文章目录 目录 文章目录 前言 1.项目远程仓库配置 2.pom文件引入相关依赖 3.代码破解 二、Excel转PDF 1.代码实现 2.Aspose.License.xml 授权文件 总结 前言 java处理excel转pdf一直没找到什么好用的免费jar包工具,自己手写的难度,恐怕高级程序员花费一年的事件,也…...
深入理解JavaScript设计模式之单例模式
目录 什么是单例模式为什么需要单例模式常见应用场景包括 单例模式实现透明单例模式实现不透明单例模式用代理实现单例模式javaScript中的单例模式使用命名空间使用闭包封装私有变量 惰性单例通用的惰性单例 结语 什么是单例模式 单例模式(Singleton Pattern&#…...

Rust 异步编程
Rust 异步编程 引言 Rust 是一种系统编程语言,以其高性能、安全性以及零成本抽象而著称。在多核处理器成为主流的今天,异步编程成为了一种提高应用性能、优化资源利用的有效手段。本文将深入探讨 Rust 异步编程的核心概念、常用库以及最佳实践。 异步编程基础 什么是异步…...

Unit 1 深度强化学习简介
Deep RL Course ——Unit 1 Introduction 从理论和实践层面深入学习深度强化学习。学会使用知名的深度强化学习库,例如 Stable Baselines3、RL Baselines3 Zoo、Sample Factory 和 CleanRL。在独特的环境中训练智能体,比如 SnowballFight、Huggy the Do…...

破解路内监管盲区:免布线低位视频桩重塑停车管理新标准
城市路内停车管理常因行道树遮挡、高位设备盲区等问题,导致车牌识别率低、逃费率高,传统模式在复杂路段束手无策。免布线低位视频桩凭借超低视角部署与智能算法,正成为破局关键。该设备安装于车位侧方0.5-0.7米高度,直接规避树枝遮…...

OCR MLLM Evaluation
为什么需要评测体系?——背景与矛盾 能干的事: 看清楚发票、身份证上的字(准确率>90%),速度飞快(眨眼间完成)。干不了的事: 碰到复杂表格(合并单元…...
Spring AOP代理对象生成原理
代理对象生成的关键类是【AnnotationAwareAspectJAutoProxyCreator】,这个类继承了【BeanPostProcessor】是一个后置处理器 在bean对象生命周期中初始化时执行【org.springframework.beans.factory.config.BeanPostProcessor#postProcessAfterInitialization】方法时…...

CVE-2023-25194源码分析与漏洞复现(Kafka JNDI注入)
漏洞概述 漏洞名称:Apache Kafka Connect JNDI注入导致的远程代码执行漏洞 CVE编号:CVE-2023-25194 CVSS评分:8.8 影响版本:Apache Kafka 2.3.0 - 3.3.2 修复版本:≥ 3.4.0 漏洞类型:反序列化导致的远程代…...

2025 后端自学UNIAPP【项目实战:旅游项目】7、景点详情页面【完结】
1、获取景点详情的请求【my_api.js】 // 引入公共的请求封装 import http from ./my_http.js// 登录接口(适配服务端返回 Token) export const login async (code, avatar) > {const res await http(/login/getWXSessionKey, {code,avatar}); };//…...