珠海网站建设排名/新手20种引流推广方法
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-Ch00 - 数学知识基础
- 1. Ch0-1矩阵的导数运算
- 1.1标量向量方程对向量求导,分母布局,分子布局
- 1.1.1 标量方程对向量的导数
- 1.1.2 向量方程对向量的导数
- 1.2 案例分析,线性回归
- 1.3 矩阵求导的链式法则
- 2. Ch0-2 特征值与特征向量
- 2.1 定义
- 2.1.1 线性变换
- 2.1.2 求解特征值,特征向量
- 2.1.3 应用:对角化矩阵——解耦Decouple
- 2.2 Summary
- 3. Ch0-3线性化Linearization
- 3.1 线性系统 Linear System 与 叠加原理 Superposition
- 3.2 线性化:Taylor Series
- 3.3 Summary
- 4. Ch0-4线性时不变系统中的冲激响应与卷积
- 4.1 LIT System:Linear Time Invariant
- 4.2 卷积 Convolution
- 4.3 单位冲激 Unit Impulse——Dirac Delta
- 5. Ch0-5Laplace Transform of Convolution卷积的拉普拉斯变换
- 6. Ch0-6复数Complex Number
- 7. Ch0-7欧拉公式的证明
- 8. Ch0-8Matlab/Simulink传递函数Transfer Function
- 9. Ch0-9阈值选取-机器视觉中应用正态分布和6-sigma
1. Ch0-1矩阵的导数运算
1.1标量向量方程对向量求导,分母布局,分子布局
1.1.1 标量方程对向量的导数
- y y y 为 一元向量 或 二元向量

- y y y为多元向量
y ⃗ = [ y 1 , y 2 , ⋯ , y n ] ⇒ ∂ f ( y ⃗ ) ∂ y ⃗ \vec{y}=\left[ y_1,y_2,\cdots ,y_{\mathrm{n}} \right] \Rightarrow \frac{\partial f\left( \vec{y} \right)}{\partial \vec{y}} y=[y1,y2,⋯,yn]⇒∂y∂f(y)
其中: f ( y ⃗ ) f\left( \vec{y} \right) f(y) 为标量 1 × 1 1\times 1 1×1, y ⃗ \vec{y} y为向量 1 × n 1\times n 1×n
分母布局 Denominator Layout——行数与分母相同
∂ f ( y ⃗ ) ∂ y ⃗ = [ ∂ f ( y ⃗ ) ∂ y 1 ⋮ ∂ f ( y ⃗ ) ∂ y n ] n × 1 \frac{\partial f\left( \vec{y} \right)}{\partial \vec{y}}=\left[ \begin{array}{c} \frac{\partial f\left( \vec{y} \right)}{\partial y_1}\\ \vdots\\ \frac{\partial f\left( \vec{y} \right)}{\partial y_{\mathrm{n}}}\\ \end{array} \right] _{n\times 1} ∂y∂f(y)= ∂y1∂f(y)⋮∂yn∂f(y) n×1分子布局 Nunerator Layout——行数与分子相同
∂ f ( y ⃗ ) ∂ y ⃗ = [ ∂ f ( y ⃗ ) ∂ y 1 ⋯ ∂ f ( y ⃗ ) ∂ y n ] 1 × n \frac{\partial f\left( \vec{y} \right)}{\partial \vec{y}}=\left[ \begin{matrix} \frac{\partial f\left( \vec{y} \right)}{\partial y_1}& \cdots& \frac{\partial f\left( \vec{y} \right)}{\partial y_{\mathrm{n}}}\\ \end{matrix} \right] _{1\times n} ∂y∂f(y)=[∂y1∂f(y)⋯∂yn∂f(y)]1×n
1.1.2 向量方程对向量的导数
f ⃗ ( y ⃗ ) = [ f ⃗ 1 ( y ⃗ ) ⋮ f ⃗ n ( y ⃗ ) ] n × 1 , y ⃗ = [ y 1 ⋮ y m ] m × 1 \vec{f}\left( \vec{y} \right) =\left[ \begin{array}{c} \vec{f}_1\left( \vec{y} \right)\\ \vdots\\ \vec{f}_{\mathrm{n}}\left( \vec{y} \right)\\ \end{array} \right] _{n\times 1},\vec{y}=\left[ \begin{array}{c} y_1\\ \vdots\\ y_{\mathrm{m}}\\ \end{array} \right] _{\mathrm{m}\times 1} f(y)= f1(y)⋮fn(y) n×1,y= y1⋮ym m×1
∂ f ⃗ ( y ⃗ ) n × 1 ∂ y ⃗ m × 1 = [ ∂ f ⃗ ( y ⃗ ) ∂ y 1 ⋮ ∂ f ⃗ ( y ⃗ ) ∂ y m ] m × 1 = [ ∂ f 1 ( y ⃗ ) ∂ y 1 ⋯ ∂ f n ( y ⃗ ) ∂ y 1 ⋮ ⋱ ⋮ ∂ f 1 ( y ⃗ ) ∂ y m ⋯ ∂ f n ( y ⃗ ) ∂ y m ] m × n \frac{\partial \vec{f}\left( \vec{y} \right) _{n\times 1}}{\partial \vec{y}_{\mathrm{m}\times 1}}=\left[ \begin{array}{c} \frac{\partial \vec{f}\left( \vec{y} \right)}{\partial y_1}\\ \vdots\\ \frac{\partial \vec{f}\left( \vec{y} \right)}{\partial y_{\mathrm{m}}}\\ \end{array} \right] _{\mathrm{m}\times 1}=\left[ \begin{matrix} \frac{\partial f_1\left( \vec{y} \right)}{\partial y_1}& \cdots& \frac{\partial f_{\mathrm{n}}\left( \vec{y} \right)}{\partial y_1}\\ \vdots& \ddots& \vdots\\ \frac{\partial f_1\left( \vec{y} \right)}{\partial y_{\mathrm{m}}}& \cdots& \frac{\partial f_{\mathrm{n}}\left( \vec{y} \right)}{\partial y_{\mathrm{m}}}\\ \end{matrix} \right] _{\mathrm{m}\times \mathrm{n}} ∂ym×1∂f(y)n×1= ∂y1∂f(y)⋮∂ym∂f(y) m×1= ∂y1∂f1(y)⋮∂ym∂f1(y)⋯⋱⋯∂y1∂fn(y)⋮∂ym∂fn(y) m×n, 为分母布局
若: y ⃗ = [ y 1 ⋮ y m ] m × 1 , A = [ a 11 ⋯ a 1 n ⋮ ⋱ ⋮ a m 1 ⋯ a m n ] \vec{y}=\left[ \begin{array}{c} y_1\\ \vdots\\ y_{\mathrm{m}}\\ \end{array} \right] _{\mathrm{m}\times 1}, A=\left[ \begin{matrix} a_{11}& \cdots& a_{1\mathrm{n}}\\ \vdots& \ddots& \vdots\\ a_{\mathrm{m}1}& \cdots& a_{\mathrm{mn}}\\ \end{matrix} \right] y= y1⋮ym m×1,A= a11⋮am1⋯⋱⋯a1n⋮amn , 则有:
- ∂ A y ⃗ ∂ y ⃗ = A T \frac{\partial A\vec{y}}{\partial \vec{y}}=A^{\mathrm{T}} ∂y∂Ay=AT(分母布局)
- ∂ y ⃗ T A y ⃗ ∂ y ⃗ = A y ⃗ + A T y ⃗ \frac{\partial \vec{y}^{\mathrm{T}}A\vec{y}}{\partial \vec{y}}=A\vec{y}+A^{\mathrm{T}}\vec{y} ∂y∂yTAy=Ay+ATy, 当 A = A T A=A^{\mathrm{T}} A=AT时, ∂ y ⃗ T A y ⃗ ∂ y ⃗ = 2 A y ⃗ \frac{\partial \vec{y}^{\mathrm{T}}A\vec{y}}{\partial \vec{y}}=2A\vec{y} ∂y∂yTAy=2Ay
若为分子布局,则有: ∂ A y ⃗ ∂ y ⃗ = A \frac{\partial A\vec{y}}{\partial \vec{y}}=A ∂y∂Ay=A
1.2 案例分析,线性回归
- ∂ A y ⃗ ∂ y ⃗ = A T \frac{\partial A\vec{y}}{\partial \vec{y}}=A^{\mathrm{T}} ∂y∂Ay=AT(分母布局)
- ∂ y ⃗ T A y ⃗ ∂ y ⃗ = A y ⃗ + A T y ⃗ \frac{\partial \vec{y}^{\mathrm{T}}A\vec{y}}{\partial \vec{y}}=A\vec{y}+A^{\mathrm{T}}\vec{y} ∂y∂yTAy=Ay+ATy, 当 A = A T A=A^{\mathrm{T}} A=AT时, ∂ y ⃗ T A y ⃗ ∂ y ⃗ = 2 A y ⃗ \frac{\partial \vec{y}^{\mathrm{T}}A\vec{y}}{\partial \vec{y}}=2A\vec{y} ∂y∂yTAy=2Ay
Linear Regression 线性回归
z ^ = y 1 + y 2 x ⇒ J = ∑ i = 1 n [ z i − ( y 1 + y 2 x i ) ] 2 \hat{z}=y_1+y_2x\Rightarrow J=\sum_{i=1}^n{\left[ z_i-\left( y_1+y_2x_i \right) \right] ^2} z^=y1+y2x⇒J=i=1∑n[zi−(y1+y2xi)]2
找到 y 1 , y 2 y_1,y_2 y1,y2 使得 J J J最小
z ⃗ = [ z 1 ⋮ z n ] , [ x ⃗ ] = [ 1 x 1 ⋮ ⋮ 1 x n ] , y ⃗ = [ y 1 y 2 ] ⇒ z ⃗ ^ = [ x ⃗ ] y ⃗ = [ y 1 + y 2 x 1 ⋮ y 1 + y 2 x n ] \vec{z}=\left[ \begin{array}{c} z_1\\ \vdots\\ z_{\mathrm{n}}\\ \end{array} \right] ,\left[ \vec{x} \right] =\left[ \begin{array}{l} 1& x_1\\ \vdots& \vdots\\ 1& x_{\mathrm{n}}\\ \end{array} \right] ,\vec{y}=\left[ \begin{array}{c} y_1\\ y_2\\ \end{array} \right] \Rightarrow \hat{\vec{z}}=\left[ \vec{x} \right] \vec{y}=\left[ \begin{array}{c} y_1+y_2x_1\\ \vdots\\ y_1+y_2x_{\mathrm{n}}\\ \end{array} \right] z= z1⋮zn ,[x]= 1⋮1x1⋮xn ,y=[y1y2]⇒z^=[x]y= y1+y2x1⋮y1+y2xn
J = [ z ⃗ − z ⃗ ^ ] T [ z ⃗ − z ⃗ ^ ] = [ z ⃗ − [ x ⃗ ] y ⃗ ] T [ z ⃗ − [ x ⃗ ] y ⃗ ] = z ⃗ z ⃗ T − z ⃗ T [ x ⃗ ] y ⃗ − y ⃗ T [ x ⃗ ] T z ⃗ + y ⃗ T [ x ⃗ ] T [ x ⃗ ] y ⃗ J=\left[ \vec{z}-\hat{\vec{z}} \right] ^{\mathrm{T}}\left[ \vec{z}-\hat{\vec{z}} \right] =\left[ \vec{z}-\left[ \vec{x} \right] \vec{y} \right] ^{\mathrm{T}}\left[ \vec{z}-\left[ \vec{x} \right] \vec{y} \right] =\vec{z}\vec{z}^{\mathrm{T}}-\vec{z}^{\mathrm{T}}\left[ \vec{x} \right] \vec{y}-\vec{y}^{\mathrm{T}}\left[ \vec{x} \right] ^{\mathrm{T}}\vec{z}+\vec{y}^{\mathrm{T}}\left[ \vec{x} \right] ^{\mathrm{T}}\left[ \vec{x} \right] \vec{y} J=[z−z^]T[z−z^]=[z−[x]y]T[z−[x]y]=zzT−zT[x]y−yT[x]Tz+yT[x]T[x]y
其中: ( z ⃗ T [ x ⃗ ] y ⃗ ) T = y ⃗ T [ x ⃗ ] T z ⃗ \left( \vec{z}^{\mathrm{T}}\left[ \vec{x} \right] \vec{y} \right) ^{\mathrm{T}}=\vec{y}^{\mathrm{T}}\left[ \vec{x} \right] ^{\mathrm{T}}\vec{z} (zT[x]y)T=yT[x]Tz, 则有:
J = z ⃗ z ⃗ T − 2 z ⃗ T [ x ⃗ ] y ⃗ + y ⃗ T [ x ⃗ ] T [ x ⃗ ] y ⃗ J=\vec{z}\vec{z}^{\mathrm{T}}-2\vec{z}^{\mathrm{T}}\left[ \vec{x} \right] \vec{y}+\vec{y}^{\mathrm{T}}\left[ \vec{x} \right] ^{\mathrm{T}}\left[ \vec{x} \right] \vec{y} J=zzT−2zT[x]y+yT[x]T[x]y
进而:
∂ J ∂ y ⃗ = 0 − 2 ( z ⃗ T [ x ⃗ ] ) T + 2 [ x ⃗ ] T [ x ⃗ ] y ⃗ = ∇ y ⃗ ⟹ ∂ J ∂ y ⃗ ∗ = 0 , y ⃗ ∗ = ( [ x ⃗ ] T [ x ⃗ ] ) − 1 [ x ⃗ ] T z ⃗ \frac{\partial J}{\partial \vec{y}}=0-2\left( \vec{z}^{\mathrm{T}}\left[ \vec{x} \right] \right) ^{\mathrm{T}}+2\left[ \vec{x} \right] ^{\mathrm{T}}\left[ \vec{x} \right] \vec{y}=\nabla \vec{y}\Longrightarrow \frac{\partial J}{\partial \vec{y}^*}=0,\vec{y}^*=\left( \left[ \vec{x} \right] ^{\mathrm{T}}\left[ \vec{x} \right] \right) ^{-1}\left[ \vec{x} \right] ^{\mathrm{T}}\vec{z} ∂y∂J=0−2(zT[x])T+2[x]T[x]y=∇y⟹∂y∗∂J=0,y∗=([x]T[x])−1[x]Tz
其中: ( [ x ⃗ ] T [ x ⃗ ] ) − 1 \left( \left[ \vec{x} \right] ^{\mathrm{T}}\left[ \vec{x} \right] \right) ^{-1} ([x]T[x])−1不一定有解,则 y ⃗ ∗ \vec{y}^* y∗无法得到解析解——定义初始 y ⃗ ∗ \vec{y}^* y∗, y ⃗ ∗ = y ⃗ ∗ − α ∇ , α = [ α 1 0 0 α 2 ] \vec{y}^*=\vec{y}^*-\alpha \nabla ,\alpha =\left[ \begin{matrix} \alpha _1& 0\\ 0& \alpha _2\\ \end{matrix} \right] y∗=y∗−α∇,α=[α100α2]
其中: α \alpha α称为学习率,对 x x x而言则需进行归一化
1.3 矩阵求导的链式法则
标量函数: J = f ( y ( u ) ) , ∂ J ∂ u = ∂ J ∂ y ∂ y ∂ u J=f\left( y\left( u \right) \right) ,\frac{\partial J}{\partial u}=\frac{\partial J}{\partial y}\frac{\partial y}{\partial u} J=f(y(u)),∂u∂J=∂y∂J∂u∂y
标量对向量求导: J = f ( y ⃗ ( u ⃗ ) ) , y ⃗ = [ y 1 ( u ⃗ ) ⋮ y m ( u ⃗ ) ] m × 1 , u ⃗ = [ u ⃗ 1 ⋮ u ⃗ n ] n × 1 J=f\left( \vec{y}\left( \vec{u} \right) \right) ,\vec{y}=\left[ \begin{array}{c} y_1\left( \vec{u} \right)\\ \vdots\\ y_{\mathrm{m}}\left( \vec{u} \right)\\ \end{array} \right] _{m\times 1},\vec{u}=\left[ \begin{array}{c} \vec{u}_1\\ \vdots\\ \vec{u}_{\mathrm{n}}\\ \end{array} \right] _{\mathrm{n}\times 1} J=f(y(u)),y= y1(u)⋮ym(u) m×1,u= u1⋮un n×1
分析: ∂ J 1 × 1 ∂ u n × 1 n × 1 = ∂ J ∂ y m × 1 m × 1 ∂ y m × 1 ∂ u n × 1 n × m \frac{\partial J_{1\times 1}}{\partial u_{\mathrm{n}\times 1}}_{\mathrm{n}\times 1}=\frac{\partial J}{\partial y_{m\times 1}}_{m\times 1}\frac{\partial y_{m\times 1}}{\partial u_{\mathrm{n}\times 1}}_{\mathrm{n}\times \mathrm{m}} ∂un×1∂J1×1n×1=∂ym×1∂Jm×1∂un×1∂ym×1n×m 无法相乘
y ⃗ = [ y 1 ( u ⃗ ) y 2 ( u ⃗ ) ] 2 × 1 , u ⃗ = [ u ⃗ 1 u ⃗ 2 u ⃗ 3 ] 3 × 1 \vec{y}=\left[ \begin{array}{c} y_1\left( \vec{u} \right)\\ y_2\left( \vec{u} \right)\\ \end{array} \right] _{2\times 1},\vec{u}=\left[ \begin{array}{c} \vec{u}_1\\ \vec{u}_2\\ \vec{u}_3\\ \end{array} \right] _{3\times 1} y=[y1(u)y2(u)]2×1,u= u1u2u3 3×1
J = f ( y ⃗ ( u ⃗ ) ) , ∂ J ∂ u ⃗ = [ ∂ J ∂ u ⃗ 1 ∂ J ∂ u ⃗ 2 ∂ J ∂ u ⃗ 3 ] 3 × 1 ⟹ ∂ J ∂ u ⃗ 1 = ∂ J ∂ y 1 ∂ y 1 ( u ⃗ ) ∂ u ⃗ 1 + ∂ J ∂ y 2 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 1 ∂ J ∂ u ⃗ 2 = ∂ J ∂ y 1 ∂ y 1 ( u ⃗ ) ∂ u ⃗ 2 + ∂ J ∂ y 2 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 2 ∂ J ∂ u ⃗ 3 = ∂ J ∂ y 1 ∂ y 1 ( u ⃗ ) ∂ u ⃗ 3 + ∂ J ∂ y 2 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 3 ⟹ ∂ J ∂ u ⃗ = [ ∂ y 1 ( u ⃗ ) ∂ u ⃗ 1 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 1 ∂ y 1 ( u ⃗ ) ∂ u ⃗ 2 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 2 ∂ y 1 ( u ⃗ ) ∂ u ⃗ 3 ∂ y 2 ( u ⃗ ) ∂ u ⃗ 3 ] 3 × 2 [ ∂ J ∂ y 1 ∂ J ∂ y 2 ] 2 × 2 = ∂ y ⃗ ( u ⃗ ) ∂ u ⃗ ∂ J ∂ y ⃗ J=f\left( \vec{y}\left( \vec{u} \right) \right) ,\frac{\partial J}{\partial \vec{u}}=\left[ \begin{array}{c} \frac{\partial J}{\partial \vec{u}_1}\\ \frac{\partial J}{\partial \vec{u}_2}\\ \frac{\partial J}{\partial \vec{u}_3}\\ \end{array} \right] _{3\times 1}\Longrightarrow \begin{array}{c} \frac{\partial J}{\partial \vec{u}_1}=\frac{\partial J}{\partial y_1}\frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_1}+\frac{\partial J}{\partial y_2}\frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_1}\\ \frac{\partial J}{\partial \vec{u}_2}=\frac{\partial J}{\partial y_1}\frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_2}+\frac{\partial J}{\partial y_2}\frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_2}\\ \frac{\partial J}{\partial \vec{u}_3}=\frac{\partial J}{\partial y_1}\frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_3}+\frac{\partial J}{\partial y_2}\frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_3}\\ \end{array} \\ \Longrightarrow \frac{\partial J}{\partial \vec{u}}=\left[ \begin{array}{l} \frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_1}& \frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_1}\\ \frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_2}& \frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_2}\\ \frac{\partial y_1\left( \vec{u} \right)}{\partial \vec{u}_3}& \frac{\partial y_2\left( \vec{u} \right)}{\partial \vec{u}_3}\\ \end{array} \right] _{3\times 2}\left[ \begin{array}{c} \frac{\partial J}{\partial y_1}\\ \frac{\partial J}{\partial y_2}\\ \end{array} \right] _{2\times 2}=\frac{\partial \vec{y}\left( \vec{u} \right)}{\partial \vec{u}}\frac{\partial J}{\partial \vec{y}} J=f(y(u)),∂u∂J= ∂u1∂J∂u2∂J∂u3∂J 3×1⟹∂u1∂J=∂y1∂J∂u1∂y1(u)+∂y2∂J∂u1∂y2(u)∂u2∂J=∂y1∂J∂u2∂y1(u)+∂y2∂J∂u2∂y2(u)∂u3∂J=∂y1∂J∂u3∂y1(u)+∂y2∂J∂u3∂y2(u)⟹∂u∂J= ∂u1∂y1(u)∂u2∂y1(u)∂u3∂y1(u)∂u1∂y2(u)∂u2∂y2(u)∂u3∂y2(u) 3×2[∂y1∂J∂y2∂J]2×2=∂u∂y(u)∂y∂J
∂ J ∂ u ⃗ = ∂ y ⃗ ( u ⃗ ) ∂ u ⃗ ∂ J ∂ y ⃗ \frac{\partial J}{\partial \vec{u}}=\frac{\partial \vec{y}\left( \vec{u} \right)}{\partial \vec{u}}\frac{\partial J}{\partial \vec{y}} ∂u∂J=∂u∂y(u)∂y∂J
eg:
x ⃗ [ k + 1 ] = A x ⃗ [ k ] + B u ⃗ [ k ] , J = x ⃗ T [ k + 1 ] x ⃗ [ k + 1 ] \vec{x}\left[ k+1 \right] =A\vec{x}\left[ k \right] +B\vec{u}\left[ k \right] ,J=\vec{x}^{\mathrm{T}}\left[ k+1 \right] \vec{x}\left[ k+1 \right] x[k+1]=Ax[k]+Bu[k],J=xT[k+1]x[k+1]
∂ J ∂ u ⃗ = ∂ x ⃗ [ k + 1 ] ∂ u ⃗ ∂ J ∂ x ⃗ [ k + 1 ] = B T ⋅ 2 x ⃗ [ k + 1 ] = 2 B T x ⃗ [ k + 1 ] \frac{\partial J}{\partial \vec{u}}=\frac{\partial \vec{x}\left[ k+1 \right]}{\partial \vec{u}}\frac{\partial J}{\partial \vec{x}\left[ k+1 \right]}=B^{\mathrm{T}}\cdot 2\vec{x}\left[ k+1 \right] =2B^{\mathrm{T}}\vec{x}\left[ k+1 \right] ∂u∂J=∂u∂x[k+1]∂x[k+1]∂J=BT⋅2x[k+1]=2BTx[k+1]
2. Ch0-2 特征值与特征向量
2.1 定义
A v ⃗ = λ v ⃗ A\vec{v}=\lambda \vec{v} Av=λv
对于给定线性变换 A A A,特征向量eigenvector v ⃗ \vec{v} v 在此变换后仍与原来的方向共线,但长度可能会发生改变,其中 λ \lambda λ 为标量,即缩放比例,称其为特征值eigenvalue
2.1.1 线性变换

2.1.2 求解特征值,特征向量
A v ⃗ = λ v ⃗ ⇒ ( A − λ E ) v ⃗ = 0 ⇒ ∣ A − λ E ∣ = 0 A\vec{v}=\lambda \vec{v}\Rightarrow \left( A-\lambda E \right) \vec{v}=0\Rightarrow \left| A-\lambda E \right|=0 Av=λv⇒(A−λE)v=0⇒∣A−λE∣=0

2.1.3 应用:对角化矩阵——解耦Decouple
P = [ v ⃗ 1 , v ⃗ 2 ] P=\left[ \vec{v}_1,\vec{v}_2 \right] P=[v1,v2]—— coordinate transformation matrix
A P = A [ v ⃗ 1 v ⃗ 2 ] = [ A [ v 11 v 12 ] A [ v 21 v 22 ] ] = [ λ 1 v 11 λ 2 v 21 λ 1 v 12 λ 2 v 22 ] = [ v 11 v 21 v 12 v 22 ] [ λ 1 0 0 λ 2 ] = P Λ ⇒ A P = P Λ ⇒ P − 1 A P = Λ AP=A\left[ \begin{matrix} \vec{v}_1& \vec{v}_2\\ \end{matrix} \right] =\left[ \begin{matrix} A\left[ \begin{array}{c} v_{11}\\ v_{12}\\ \end{array} \right]& A\left[ \begin{array}{c} v_{21}\\ v_{22}\\ \end{array} \right]\\ \end{matrix} \right] =\left[ \begin{matrix} \lambda _1v_{11}& \lambda _2v_{21}\\ \lambda _1v_{12}& \lambda _2v_{22}\\ \end{matrix} \right] =\left[ \begin{matrix} v_{11}& v_{21}\\ v_{12}& v_{22}\\ \end{matrix} \right] \left[ \begin{matrix} \lambda _1& 0\\ 0& \lambda _2\\ \end{matrix} \right] =P\varLambda \\ \Rightarrow AP=P\varLambda \Rightarrow P^{-1}AP=\varLambda AP=A[v1v2]=[A[v11v12]A[v21v22]]=[λ1v11λ1v12λ2v21λ2v22]=[v11v12v21v22][λ100λ2]=PΛ⇒AP=PΛ⇒P−1AP=Λ
- 微分方程组 state-space rep
2.2 Summary
- A v ⃗ = λ v ⃗ A\vec{v}=\lambda \vec{v} Av=λv 在一条直线上
- 求解方法: ∣ A − λ E ∣ = 0 \left| A-\lambda E \right|=0 ∣A−λE∣=0
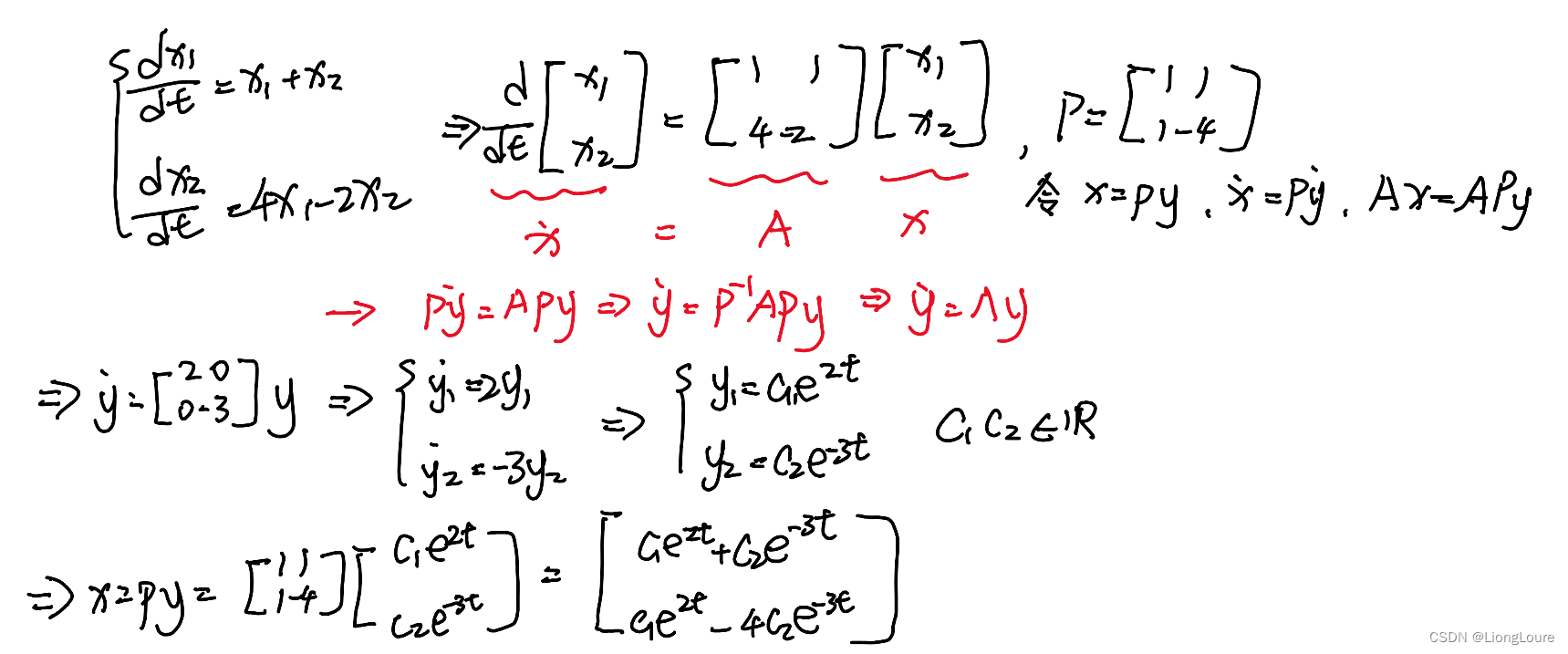
- P − 1 A P = Λ , P = [ v ⃗ 1 v ⃗ 2 ⋯ ] , Λ = [ λ 1 λ 2 ⋱ ] P^{-1}AP=\varLambda , P=\left[ \begin{matrix} \vec{v}_1& \vec{v}_2& \cdots\\ \end{matrix} \right] , \varLambda =\left[ \begin{matrix} \lambda _1& & \\ & \lambda _2& \\ & & \ddots\\ \end{matrix} \right] P−1AP=Λ,P=[v1v2⋯],Λ= λ1λ2⋱
- x ˙ = A x , x = P y , y ˙ = Λ y \dot{x}=Ax, x=Py,\dot{y}=\varLambda y x˙=Ax,x=Py,y˙=Λy
3. Ch0-3线性化Linearization
3.1 线性系统 Linear System 与 叠加原理 Superposition
x ˙ = f ( x ) \dot{x}=f\left( x \right) x˙=f(x)
- x 1 , x 2 x_1,x_2 x1,x2 是解
- x 3 = k 1 x 1 + k 2 x 2 , k 1 , k 2 ∈ R x_3=k_1x_1+k_2x_2,k_1,k_2\in \mathbb{R} x3=k1x1+k2x2,k1,k2∈R
- x 3 x_3 x3 是解
eg:
x ¨ + 2 x ˙ + 2 x = 0 √ x ¨ + 2 x ˙ + 2 x 2 = 0 × x ¨ + sin x ˙ + 2 x = 0 × \ddot{x}+2\dot{x}+\sqrt{2}x=0 √ \\ \ddot{x}+2\dot{x}+\sqrt{2}x^2=0 × \\ \ddot{x}+\sin \dot{x}+\sqrt{2}x=0 × x¨+2x˙+2x=0√x¨+2x˙+2x2=0×x¨+sinx˙+2x=0×
3.2 线性化:Taylor Series
f ( x ) = f ( x 0 ) + f ′ ( x 0 ) 1 ! ( x − x 0 ) + f ′ ′ ( x 0 ) 2 ! ( x − x 0 ) 2 + ⋯ + f n ( x 0 ) n ! ( x − x 0 ) n f\left( x \right) =f\left( x_0 \right) +\frac{f^{\prime}\left( x_0 \right)}{1!}\left( x-x_0 \right) +\frac{{f^{\prime}}^{\prime}\left( x_0 \right)}{2!}\left( x-x_0 \right) ^2+\cdots +\frac{f^n\left( x_0 \right)}{n!}\left( x-x_0 \right) ^n f(x)=f(x0)+1!f′(x0)(x−x0)+2!f′′(x0)(x−x0)2+⋯+n!fn(x0)(x−x0)n
若 x − x 0 → 0 , ( x − x 0 ) n → 0 x-x_0\rightarrow 0,\left( x-x_0 \right) ^n\rightarrow 0 x−x0→0,(x−x0)n→0,则有: ⇒ f ( x ) = f ( x 0 ) + f ′ ( x 0 ) ( x − x 0 ) ⇒ f ( x ) = k 1 + k 2 x − k 3 x 0 ⇒ f ( x ) = k 2 x + b \Rightarrow f\left( x \right) =f\left( x_0 \right) +f^{\prime}\left( x_0 \right) \left( x-x_0 \right) \Rightarrow f\left( x \right) =k_1+k_2x-k_3x_0\Rightarrow f\left( x \right) =k_2x+b ⇒f(x)=f(x0)+f′(x0)(x−x0)⇒f(x)=k1+k2x−k3x0⇒f(x)=k2x+b

eg1:

eg2:

eg3:
3.3 Summary
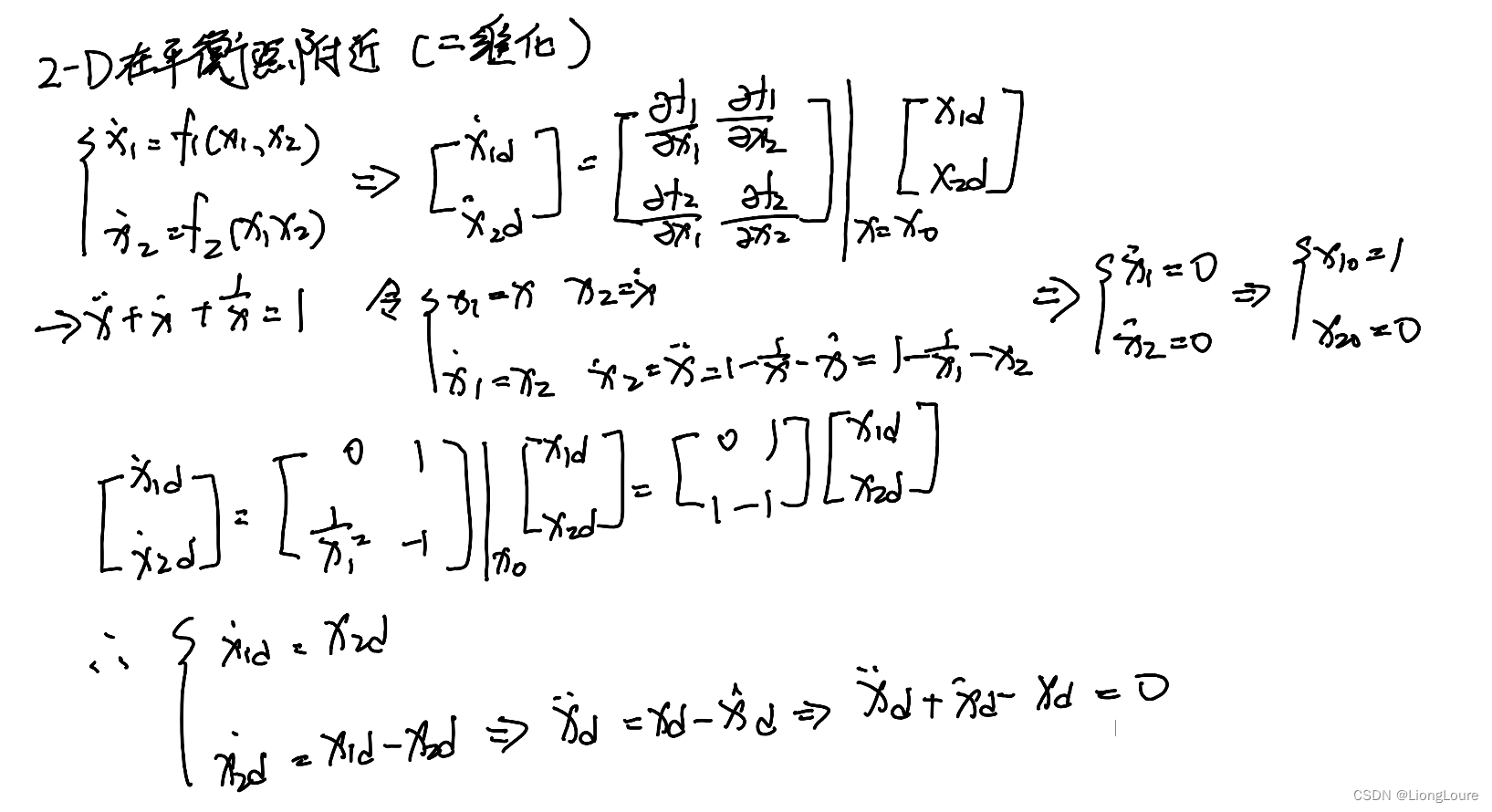
- f ( x ) = f ( x 0 ) + f ′ ( x 0 ) 1 ! ( x − x 0 ) , x − x 0 → 0 f\left( x \right) =f\left( x_0 \right) +\frac{f^{\prime}\left( x_0 \right)}{1!}\left( x-x_0 \right) ,x-x_0\rightarrow 0 f(x)=f(x0)+1!f′(x0)(x−x0),x−x0→0
- [ x ˙ 1 d x ˙ 2 d ] = [ ∂ f 1 ∂ x 1 ∂ f 1 ∂ x 2 ∂ f 2 ∂ x 1 ∂ f 2 ∂ x 2 ] ∣ x = x 0 [ x 1 d x 2 d ] \left[ \begin{array}{c} \dot{x}_{1\mathrm{d}}\\ \dot{x}_{2\mathrm{d}}\\ \end{array} \right] =\left. \left[ \begin{matrix} \frac{\partial f_1}{\partial x_1}& \frac{\partial f_1}{\partial x_2}\\ \frac{\partial f_2}{\partial x_1}& \frac{\partial f_2}{\partial x_2}\\ \end{matrix} \right] \right|_{\mathrm{x}=\mathrm{x}_0}\left[ \begin{array}{c} x_{1\mathrm{d}}\\ x_{2\mathrm{d}}\\ \end{array} \right] [x˙1dx˙2d]=[∂x1∂f1∂x1∂f2∂x2∂f1∂x2∂f2] x=x0[x1dx2d]
4. Ch0-4线性时不变系统中的冲激响应与卷积
4.1 LIT System:Linear Time Invariant
-
运算operator : O { ⋅ } O\left\{ \cdot \right\} O{⋅}
I n p u t O { f ( t ) } = o u t p u t x ( t ) \begin{array}{c} Input\\ O\left\{ f\left( t \right) \right\}\\ \end{array}=\begin{array}{c} output\\ x\left( t \right)\\ \end{array} InputO{f(t)}=outputx(t) -
线性——
叠加原理superpositin principle:
{ O { f 1 ( t ) + f 2 ( t ) } = x 1 ( t ) + x 2 ( t ) O { a f 1 ( t ) } = a x 1 ( t ) O { a 1 f 1 ( t ) + a 2 f 2 ( t ) } = a 1 x 1 ( t ) + a 2 x 2 ( t ) \begin{cases} O\left\{ f_1\left( t \right) +f_2\left( t \right) \right\} =x_1\left( t \right) +x_2\left( t \right)\\ O\left\{ af_1\left( t \right) \right\} =ax_1\left( t \right)\\ O\left\{ a_1f_1\left( t \right) +a_2f_2\left( t \right) \right\} =a_1x_1\left( t \right) +a_2x_2\left( t \right)\\ \end{cases} ⎩ ⎨ ⎧O{f1(t)+f2(t)}=x1(t)+x2(t)O{af1(t)}=ax1(t)O{a1f1(t)+a2f2(t)}=a1x1(t)+a2x2(t) -
时不变Time Invariant:
O { f ( t ) } = x ( t ) ⇒ O { f ( t − τ ) } = x ( t − τ ) O\left\{ f\left( t \right) \right\} =x\left( t \right) \Rightarrow O\left\{ f\left( t-\tau \right) \right\} =x\left( t-\tau \right) O{f(t)}=x(t)⇒O{f(t−τ)}=x(t−τ)
4.2 卷积 Convolution

4.3 单位冲激 Unit Impulse——Dirac Delta
LIT系统,h(t)可以完全定义系统

5. Ch0-5Laplace Transform of Convolution卷积的拉普拉斯变换
线性时不变系统 : LIT System
冲激响应:Impluse Response
卷积:Convolution
Laplace Transform : X ( s ) = L [ x ( t ) ] = ∫ 0 ∞ x ( t ) e − s t d t X\left( s \right) =\mathcal{L} \left[ x\left( t \right) \right] =\int_0^{\infty}{x\left( t \right) e^{-st}}\mathrm{d}t X(s)=L[x(t)]=∫0∞x(t)e−stdt
Convolution : x ( t ) ∗ g ( t ) = ∫ 0 t x ( τ ) g ( t − τ ) d τ x\left( t \right) *g\left( t \right) =\int_0^t{x\left( \tau \right) g\left( t-\tau \right)}\mathrm{d}\tau x(t)∗g(t)=∫0tx(τ)g(t−τ)dτ
证明: L [ x ( t ) ∗ g ( t ) ] = X ( s ) G ( s ) \mathcal{L} \left[ x\left( t \right) *g\left( t \right) \right] =X\left( s \right) G\left( s \right) L[x(t)∗g(t)]=X(s)G(s)
L [ x ( t ) ∗ g ( t ) ] = ∫ 0 ∞ ∫ 0 t x ( τ ) g ( t − τ ) d τ e − s t d t = ∫ 0 ∞ ∫ τ ∞ x ( τ ) g ( t − τ ) e − s t d t d τ \mathcal{L} \left[ x\left( t \right) *g\left( t \right) \right] =\int_0^{\infty}{\int_0^t{x\left( \tau \right) g\left( t-\tau \right) \mathrm{d}\tau}e^{-st}}\mathrm{d}t=\int_0^{\infty}{\int_{\tau}^{\infty}{x\left( \tau \right) g\left( t-\tau \right)}e^{-st}}\mathrm{d}t\mathrm{d}\tau L[x(t)∗g(t)]=∫0∞∫0tx(τ)g(t−τ)dτe−stdt=∫0∞∫τ∞x(τ)g(t−τ)e−stdtdτ
>令: u = t − τ , t = u + τ , d t = d u + d τ , t ∈ [ τ , + ∞ ) ⇒ u ∈ [ 0 , + ∞ ) u=t-\tau ,t=u+\tau ,\mathrm{d}t=\mathrm{d}u+\mathrm{d}\tau ,t\in \left[ \tau ,+\infty \right) \Rightarrow u\in \left[ 0,+\infty \right) u=t−τ,t=u+τ,dt=du+dτ,t∈[τ,+∞)⇒u∈[0,+∞)
L [ x ( t ) ∗ g ( t ) ] = ∫ 0 ∞ ∫ 0 ∞ x ( τ ) g ( u ) e − s ( u + τ ) d u d τ = ∫ 0 ∞ x ( τ ) e − s τ d τ ∫ 0 ∞ g ( u ) e − s u d u = X ( s ) G ( s ) \mathcal{L} \left[ x\left( t \right) *g\left( t \right) \right] =\int_0^{\infty}{\int_0^{\infty}{x\left( \tau \right) g\left( u \right)}e^{-s\left( u+\tau \right)}}\mathrm{d}u\mathrm{d}\tau =\int_0^{\infty}{x\left( \tau \right)}e^{-s\tau}\mathrm{d}\tau \int_0^{\infty}{g\left( u \right)}e^{-su}\mathrm{d}u=X\left( s \right) G\left( s \right) L[x(t)∗g(t)]=∫0∞∫0∞x(τ)g(u)e−s(u+τ)dudτ=∫0∞x(τ)e−sτdτ∫0∞g(u)e−sudu=X(s)G(s)
L [ x ( t ) ∗ g ( t ) ] = L [ x ( t ) ] L [ g ( t ) ] = X ( s ) G ( s ) \mathcal{L} \left[ x\left( t \right) *g\left( t \right) \right] =\mathcal{L} \left[ x\left( t \right) \right] \mathcal{L} \left[ g\left( t \right) \right] =X\left( s \right) G\left( s \right) L[x(t)∗g(t)]=L[x(t)]L[g(t)]=X(s)G(s)
6. Ch0-6复数Complex Number
x 2 − 2 x + 2 = 0 ⇒ x = 1 ± i x^2-2x+2=0\Rightarrow x=1\pm i x2−2x+2=0⇒x=1±i
- 代数表达: z = a + b i , R e ( z ) = a , I m ( z ) = b z=a+bi,\mathrm{Re}\left( z \right) =a,\mathrm{Im}\left( z \right) =b z=a+bi,Re(z)=a,Im(z)=b, 分别称为
实部与虚部 - 几何表达: z = ∣ z ∣ cos θ + ∣ z ∣ sin θ i = ∣ z ∣ ( cos θ + sin θ i ) z=\left| z \right|\cos \theta +\left| z \right|\sin \theta i=\left| z \right|\left( \cos \theta +\sin \theta i \right) z=∣z∣cosθ+∣z∣sinθi=∣z∣(cosθ+sinθi)

- 指数表达: z = ∣ z ∣ e i θ z=\left| z \right|e^{i\theta} z=∣z∣eiθ
z 1 = ∣ z 1 ∣ e i θ 1 , z 2 = ∣ z 2 ∣ e i θ 2 ⇒ z 1 ⋅ z 2 = ∣ z 1 ∣ ∣ z 2 ∣ e i ( θ 1 + θ 2 ) z_1=\left| z_1 \right|e^{i\theta _1},z_2=\left| z_2 \right|e^{i\theta _2}\Rightarrow z_1\cdot z_2=\left| z_1 \right|\left| z_2 \right|e^{i\left( \theta _1+\theta _2 \right)} z1=∣z1∣eiθ1,z2=∣z2∣eiθ2⇒z1⋅z2=∣z1∣∣z2∣ei(θ1+θ2)

共轭: z 1 = a 1 + b 1 i , z 2 = a 2 − b 2 i ⇒ z 1 = z ˉ 2 z_1=a_1+b_1i,z_2=a_2-b_2i\Rightarrow z_1=\bar{z}_2 z1=a1+b1i,z2=a2−b2i⇒z1=zˉ2

7. Ch0-7欧拉公式的证明
更有意思的版本
e i θ = cos θ + sin θ i , i = − 1 e^{i\theta}=\cos \theta +\sin \theta i,i=\sqrt{-1} eiθ=cosθ+sinθi,i=−1
证明:
f ( θ ) = e i θ cos θ + sin θ i f ′ ( θ ) = i e i θ ( cos θ + sin θ i ) − e i θ ( − sin θ + cos θ i ) ( cos θ + sin θ i ) 2 = 0 ⇒ f ( θ ) = c o n s tan t f ( θ ) = f ( 0 ) = e i 0 cos 0 + sin 0 i = 1 ⇒ e i θ cos θ + sin θ i = 1 ⇒ e i θ = cos θ + sin θ i f\left( \theta \right) =\frac{e^{i\theta}}{\cos \theta +\sin \theta i} \\ f^{\prime}\left( \theta \right) =\frac{ie^{i\theta}\left( \cos \theta +\sin \theta i \right) -e^{i\theta}\left( -\sin \theta +\cos \theta i \right)}{\left( \cos \theta +\sin \theta i \right) ^2}=0 \\ \Rightarrow f\left( \theta \right) =\mathrm{cons}\tan\mathrm{t} \\ f\left( \theta \right) =f\left( 0 \right) =\frac{e^{i0}}{\cos 0+\sin 0i}=1\Rightarrow \frac{e^{i\theta}}{\cos \theta +\sin \theta i}=1 \\ \Rightarrow e^{i\theta}=\cos \theta +\sin \theta i f(θ)=cosθ+sinθieiθf′(θ)=(cosθ+sinθi)2ieiθ(cosθ+sinθi)−eiθ(−sinθ+cosθi)=0⇒f(θ)=constantf(θ)=f(0)=cos0+sin0iei0=1⇒cosθ+sinθieiθ=1⇒eiθ=cosθ+sinθi
求解: sin x = 2 \sin x=2 sinx=2
令: sin z = 2 = c , z ∈ C \sin z=2=c,z\in \mathbb{C} sinz=2=c,z∈C
{ e i z = cos z + sin z i e i ( − z ) = cos z − sin z i ⇒ e i z − e − i z = 2 sin z i \begin{cases} e^{iz}=\cos z+\sin zi\\ e^{i\left( -z \right)}=\cos z-\sin zi\\ \end{cases}\Rightarrow e^{iz}-e^{-iz}=2\sin zi {eiz=cosz+sinziei(−z)=cosz−sinzi⇒eiz−e−iz=2sinzi
∴ sin z = e i z − e − i z 2 i = c ⇒ e a i − b − e b − a i 2 i = e a i e − b − e b e − a i 2 i = c \therefore \sin z=\frac{e^{iz}-e^{-iz}}{2i}=c\Rightarrow \frac{e^{ai-b}-e^{b-ai}}{2i}=\frac{e^{ai}e^{-b}-e^be^{-ai}}{2i}=c ∴sinz=2ieiz−e−iz=c⇒2ieai−b−eb−ai=2ieaie−b−ebe−ai=c
且有: { e i a = cos a + sin a i e i ( − a ) = cos a − sin a i \begin{cases} e^{ia}=\cos a+\sin ai\\ e^{i\left( -a \right)}=\cos a-\sin ai\\ \end{cases} {eia=cosa+sinaiei(−a)=cosa−sinai
⇒ e − b ( cos a + sin a i ) − e b ( cos a − sin a i ) 2 i = ( e − b − e b ) cos a − ( e − b + e b ) sin a i 2 i = c ⇒ 1 2 ( e b − e − b ) cos a i + 1 2 ( e − b + e b ) sin a = c = c + 0 i \Rightarrow \frac{e^{-b}\left( \cos a+\sin ai \right) -e^b\left( \cos a-\sin ai \right)}{2i}=\frac{\left( e^{-b}-e^b \right) \cos a-\left( e^{-b}+e^b \right) \sin ai}{2i}=c \\ \Rightarrow \frac{1}{2}\left( e^b-e^{-b} \right) \cos ai+\frac{1}{2}\left( e^{-b}+e^b \right) \sin a=c=c+0i ⇒2ie−b(cosa+sinai)−eb(cosa−sinai)=2i(e−b−eb)cosa−(e−b+eb)sinai=c⇒21(eb−e−b)cosai+21(e−b+eb)sina=c=c+0i
⇒ { 1 2 ( e − b + e b ) sin a = c 1 2 ( e b − e − b ) cos a = 0 \Rightarrow \begin{cases} \frac{1}{2}\left( e^{-b}+e^b \right) \sin a=c\\ \frac{1}{2}\left( e^b-e^{-b} \right) \cos a=0\\ \end{cases} ⇒{21(e−b+eb)sina=c21(eb−e−b)cosa=0
- 当 b = 0 b=0 b=0 时, sin a = c \sin a=c sina=c 不成立(所设 a , b ∈ R a,b\in \mathbb{R} a,b∈R)
- 当 cos a = 0 \cos a=0 cosa=0 时, 1 2 ( e − b + e b ) = ± c ⇒ 1 + e 2 b ± 2 c e b = 0 \frac{1}{2}\left( e^{-b}+e^b \right) =\pm c\Rightarrow 1+e^{2b}\pm 2ce^b=0 21(e−b+eb)=±c⇒1+e2b±2ceb=0
设 u = e b > 0 u=e^b>0 u=eb>0 ,则有: u = ± c ± c 2 − 1 u=\pm c\pm \sqrt{c^2-1} u=±c±c2−1
∴ b = ln ( c ± c 2 − 1 ) \therefore b=\ln \left( c\pm \sqrt{c^2-1} \right) ∴b=ln(c±c2−1)
⇒ z = π 2 + 2 k π + ln ( c ± c 2 − 1 ) i = π 2 + 2 k π + ln ( 2 ± 3 ) i \Rightarrow z=\frac{\pi}{2}+2k\pi +\ln \left( c\pm \sqrt{c^2-1} \right) i=\frac{\pi}{2}+2k\pi +\ln \left( 2\pm \sqrt{3} \right) i ⇒z=2π+2kπ+ln(c±c2−1)i=2π+2kπ+ln(2±3)i
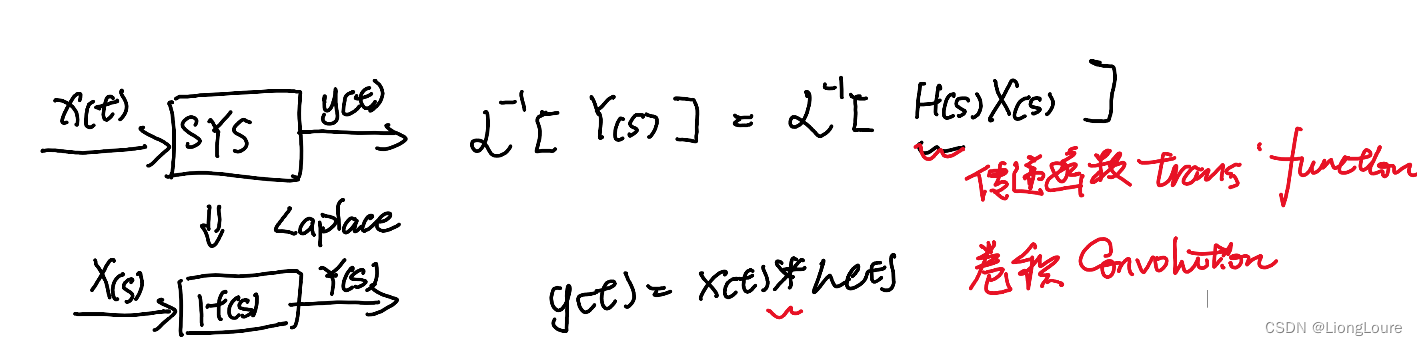
8. Ch0-8Matlab/Simulink传递函数Transfer Function

L − 1 [ a 0 Y ( s ) + s Y ( s ) ] = L − 1 [ b 0 U ( s ) + b 1 s U ( s ) ] ⇒ a 0 y ( t ) + y ˙ ( t ) = b 0 u ( t ) + b 1 u ˙ ( t ) ⇒ y ˙ − b 1 u ˙ = b 0 u − y \mathcal{L} ^{-1}\left[ a_0Y\left( s \right) +sY\left( s \right) \right] =\mathcal{L} ^{-1}\left[ b_0U\left( s \right) +b_1sU\left( s \right) \right] \\ \Rightarrow a_0y\left( t \right) +\dot{y}\left( t \right) =b_0u\left( t \right) +b_1\dot{u}\left( t \right) \\ \Rightarrow \dot{y}-b_1\dot{u}=b_0u-y L−1[a0Y(s)+sY(s)]=L−1[b0U(s)+b1sU(s)]⇒a0y(t)+y˙(t)=b0u(t)+b1u˙(t)⇒y˙−b1u˙=b0u−y


9. Ch0-9阈值选取-机器视觉中应用正态分布和6-sigma
5M1E——造成产品质量波动的六因素
人 Man Manpower
机器 Machine
材料 Material
方法 Method
测量 Measurment
环境 Envrionment
DMAIC —— 6σ管理中的流程改善
定义 Define
测量 Measure
分析 Analyse
改善 Improve
控制 Control
随机变量与正态分布 Normal Distribution
X = ( μ , σ 2 ) X=\left( \mu ,\sigma ^2 \right) X=(μ,σ2)
μ \mu μ : 期望(平均值), σ 2 \sigma ^2 σ2:方差

6σ与实际应用


相关文章:
[足式机器人]Part2 Dr. CAN学习笔记-Ch00 - 数学知识基础
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Ch00 - 数学知识基础 1. Ch0-1矩阵的导数运算1.1标量向量方程对向量求导,分母布局,分子布局1.1.1 标量方程对向量的导数1.1.2 向量方程对向量的导数 1.2 案例分析…...

Jmeter、postman、python 三大主流技术如何操作数据库?
只要是做测试工作的,必然会接触到数据库 1、前言 只要是做测试工作的,必然会接触到数据库,数据库在工作中的主要应用场景包括但不限于以下: 功能测试中,涉及数据展示功能,需查库校验数据正确及完整性&…...
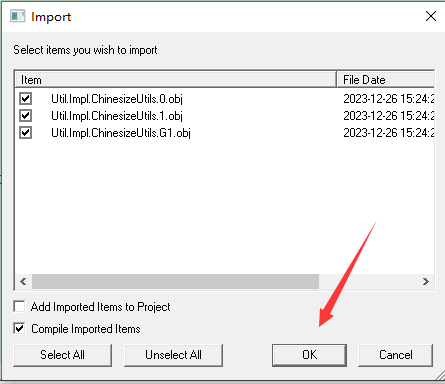
IRIS、Cache系统类汉化
文章目录 系统类汉化简介标签说明汉化系统包说明效果展示类分类%Library包下的类重点类非重点类弃用类数据类型类工具类 使用说明 系统类汉化 简介 帮助小伙伴更加容易理解后台系统程序方法使用,降低代码的难度。符合本土化中文环境的开发和维护,有助于…...
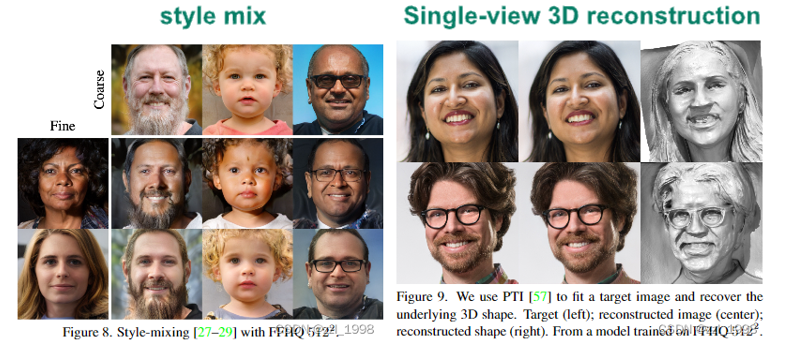
【三维生成】稀疏重建、Image-to-3D方法(汇总)
系列文章目录 总结一下近5年的三维生成算法,持续更新 文章目录 系列文章目录一、LRM:单图像的大模型重建(2023)摘要1.前言2.Method3.实验 二、SSDNeRF:单阶段Diffusion NeRF的三维生成和重建(ICCV 2023&am…...

Java基础知识:单元测试和调试技巧
在Java编程中,单元测试和调试是提高代码质量和开发效率的重要环节。通过单元测试,我们可以验证代码的正确性,而调试则帮助我们找出并修复代码中的错误。本文将介绍Java中的单元测试和调试技巧,并提供相关示例代码,帮助…...
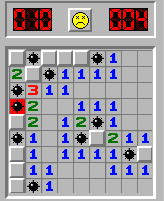
[c]扫雷
题目描述 扫雷游戏是一款十分经典的单机小游戏。在n行m列的雷区中有一些格子含有地雷(称之为地雷格),其他格子不含地雷(称之为非地雷格)。 玩家翻开一个非地雷格时,该格将会出现一个数字——提示周围格子中…...
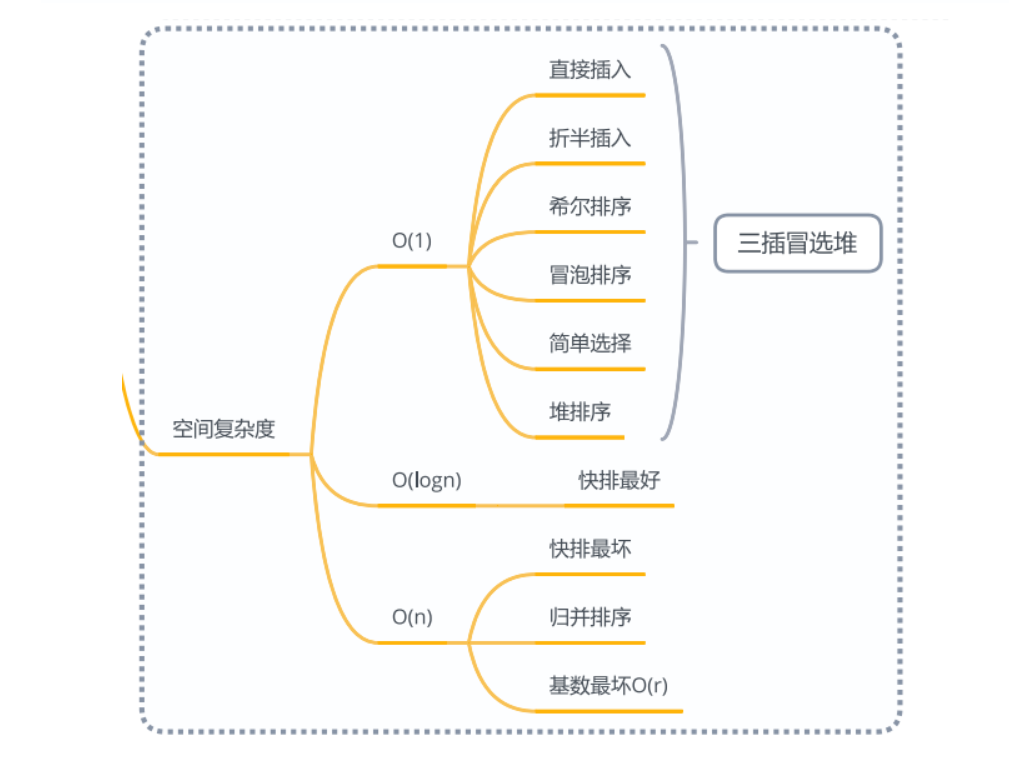
数据结构-十大排序算法
数据结构十大排序算法 十大排序算法分别是直接插入排序、折半插入排序、希尔排序、冒泡排序、快速排序、简单选择排序、堆排序、归并排序、基数排序、外部排序。 其中插入排序包括直接插入排序、折半插入排序、希尔排序;交换排序包括冒泡排序、快速排序࿱…...
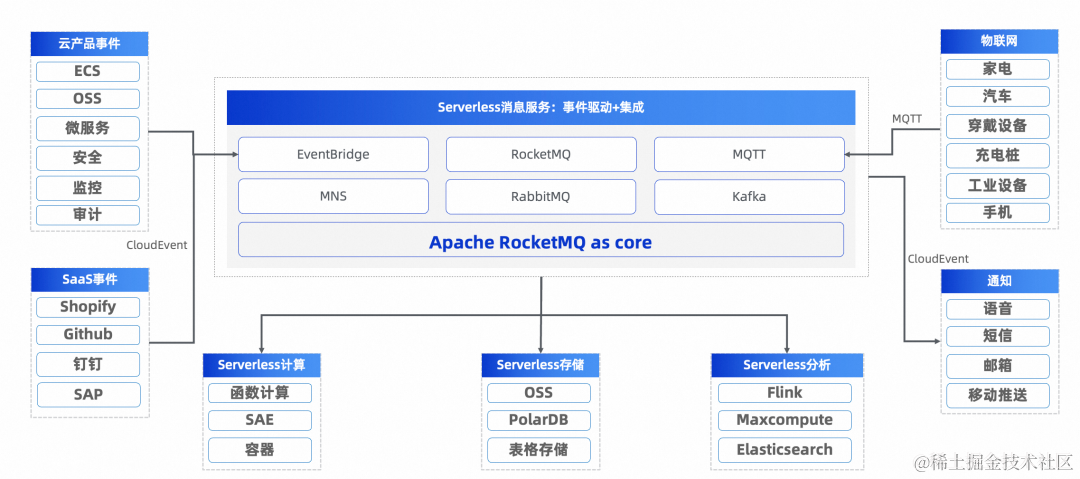
Apache RocketMQ,构建云原生统一消息引擎
本文整理于 2023 年云栖大会林清山带来的主题演讲《Apache RocketMQ 云原生统一消息引擎》 演讲嘉宾: 林清山(花名:隆基),Apache RocketMQ 联合创始人,阿里云资深技术专家,阿里云消息产品线负…...
(四) ClickHouse 中使用 `MaterializedMySQL` 引擎单独同步 MySQL 数据库中的特定表(例如 `aaa` 和 `bbb`)
要在 ClickHouse 中使用 MaterializedMySQL 引擎单独同步 MySQL 数据库中的特定表(例如 aaa 和 bbb),您可以使用 TABLE OVERRIDE 功能。这个功能允许您指定要同步的特定表,同时忽略其他表。以下是步骤说明: 1. 启用 M…...
TikTok真题第4天 | 1366. 通过投票对团队排名、1029.两地调度、562.矩阵中最长的连续1线段
1366. 通过投票对团队排名 题目链接:rank-teams-by-votes/ 解法: 这道题就是统计每个队伍在每个排名的投票数,队伍为A、B、C,则排名有1、2、3,按照投票数进行降序排列。如果有队伍在每个排名的投票数都一样…...

时序预测 | Matlab实现SSA-CNN-LSTM麻雀算法优化卷积长短期记忆神经网络时间序列预测
时序预测 | Matlab实现SSA-CNN-LSTM麻雀算法优化卷积长短期记忆神经网络时间序列预测 目录 时序预测 | Matlab实现SSA-CNN-LSTM麻雀算法优化卷积长短期记忆神经网络时间序列预测预测效果基本介绍程序设计参考资料 预测效果 基本介绍 MATLAB实现SSA-CNN-LSTM麻雀算法优化卷积长短…...
负载均衡——Ribbon
文章目录 Ribbon和Eureka配合使用项目引入RibbonRestTemplate添加LoadBalanced注解注意自定义均衡方式代码注册方式配置方式 Ribbon脱离Eureka使用 Ribbon,Nexflix发布的负载均衡器,有助于控制HTTP和TCP客户端的行为。基于某种负载均衡算法(轮…...
7.微服务设计原则
1.微服务演进策略 从单体应用向微服务演进策略: 绞杀者策略,修缮者策略的另起炉灶策略; 绞杀者策赂 绞杀者策略是一种逐步剥离业务能力,用微服务逐步替代原有单体应用的策略。它对单体应用进行领域建模,根据领域边界࿰…...

【MATLAB库函数系列】线性调频Z(Chirp-Z,CZT)的MATLAB源码和C语言实现
在上一篇博客 【数字信号处理】线性调频Z(Chirp-Z,CZT)算法详解 已经详细介绍了CZT变换的应用背景和原理,先回顾一下: 回顾CZT算法 采用 FFT 算法可以很快计算出全部 N N N点 DFT 值,即Z变换 X ( z ) X(z) <...
BIT-6-指针(C语言初阶学习)
1. 指针是什么 2. 指针和指针类型 3. 野指针 4. 指针运算 5. 指针和数组 6. 二级指针 7. 指针数组 1. 指针是什么? 指针是什么? 指针理解的2个要点: 指针是内存中一个最小单元的编号,也就是地址平时口语中说的指针,通常…...
傻瓜式教学Docker 使用docker compose部署 php nginx mysql
首先你可以准备这个三个服务,也可以在docker compose 文件中 直接拉去指定镜像,这里演示的是镜像服务已经在本地安装好了,提供如下: PHP # 设置基础镜像 FROM php:8.2-fpm# install dependencies RUN apt-get update && apt-get install -y \vim \libzip-dev \libpng…...
node express简单微服务
首先,安装所需的依赖项,可以使用npm或yarn进行安装: $ npm install express axios接下来,创建一个名为service1.js的文件,用于实现第一个微服务: const express require(express); const axios require…...
nginx-proxy-manager初次登录502 bad gateway
nginx-proxy-manager初次登录502 bad gateway 按照官方docker-compose安装后,页面如下: 默认账户密码: adminexample.com/changeme点击sign in,提示Bad Gateway 打开调试 重装后依然如此,最后查阅githup issue 找到答案 https://github.com/NginxProxyManager/nginx-proxy-…...

Servlet见解2
4 创建servlet的三种方式 4.1 实现Servlet接口的方式 import javax.servlet.*; import javax.servlet.annotation.WebServlet; import java.io.IOException;WebServlet("/test1") public class Servlet1 implements Servlet {Overridepublic void init(ServletConf…...
【SpringCloud】-OpenFeign实战及源码解析、与Ribbon结合
一、背景介绍 二、正文 OpenFeign是什么? OpenFeign(简称Feign)是一个声明式的Web服务客户端,用于简化服务之间的HTTP通信。与Nacos和Ribbon等组件协同,以支持在微服务体系结构中方便地进行服务间的通信;…...

走进数字金融峰会,为金融科技数字化赋能
12月20—21日,FSIDigital数字金融峰会在上海圆满召开。本次峰会包含InsurDigital数字保险峰会和B&SDigital数字银行与证券峰会2场平行峰会;吸引了近600位来自保险、银行、证券以及金融科技等行业的领导者和专家齐聚一堂,共同探讨金融业数…...
docker-compose部署kafka
docker-compose.yml配置 version: "3" services:kafka:image: bitnami/kafka:latestports:- 7050:7050environment:- KAFKA_ENABLE_KRAFTyes- KAFKA_CFG_PROCESS_ROLESbroker,controller- KAFKA_CFG_CONTROLLER_LISTENER_NAMESCONTROLLER- KAFKA_CFG_LISTENERSPLAIN…...
Spark与Hadoop的关系和区别
在大数据领域,Spark和Hadoop是两个备受欢迎的分布式数据处理框架,它们在处理大规模数据时都具有重要作用。本文将深入探讨Spark与Hadoop之间的关系和区别,以帮助大家的功能和用途。 Spark和Hadoop简介 1 Hadoop Hadoop是一个由Apache基金会…...
蓝桥杯-Excel地址[Java]
目录: 学习目标: 学习内容: 学习时间: 题目: 题目描述: 输入描述: 输出描述: 输入输出样例: 示例 1: 运行限制: 题解: 思路: 学习目标: 刷蓝桥杯题库日记 学习内容: 编号96题目Ex…...

OSPF多区域配置-新版(12)
目录 整体拓扑 操作步骤 1.基本配置 1.1 配置R1的IP 1.2 配置R2的IP 1.3 配置R3的IP 1.4 配置R4的IP 1.5 配置R5的IP 1.6 配置R6的IP 1.7 配置PC-1的IP地址 1.8 配置PC-2的IP地址 1.9 配置PC-3的IP地址 1.10 配置PC-4的IP地址 1.11 检测R5与PC1连通性 1.12 检测…...
华为---USG6000V防火墙web基本配置示例
目录 1. 实验要求 2. 配置思路 3. 网络拓扑图 4. USG6000V防火墙端口和各终端相关配置 5. 在USG6000V防火墙web管理界面创建区域和添加相应端口 6. 给USG6000V防火墙端口配置IP地址 7. 配置通行策略 8. 测试验证 8.1 逐个删除策略,再看各区域终端通信情况 …...
Ksher H5页面支付实例指导 (PHP实现)
背景 前两天,公司的项目,为了满足泰国客户的支付需求,要求使用 Ksher (开时支付) 对接任务突然就给了鄙人,一脸懵 … 通过了解客户的使用场景、以及参考官网指导 发现:Ksher支付最令人满意的便是 —— 提供了便捷的 支…...

https密钥认证、上传镜像实验
一、第一台主机通过https密钥对认证 1、安装docker服务 (1)安装环境依赖包 yum -y install yum-utils device-mapper-persistent-data lvm2 (2)设置阿里云镜像源 yum-config-manager --add-repo http://mirrors.aliyun.com/do…...

three.js使用精灵模型Sprite渲染森林
效果: 源码: <template><div><el-container><el-main><div class"box-card-left"><div id"threejs" style"border: 1px solid red"></div><div class"box-right&quo…...

什么是数据可视化?数据可视化的流程与步骤
前言 数据可视化将大大小小的数据集转化为更容易被人脑理解和处理的视觉效果。可视化在我们的日常生活中非常普遍,但它们通常以众所周知的图表和图形的形式出现。正确的数据可视化以有意义和直观的方式为复杂的数据集提供关键的见解。 数据可视化定义 数据可视化…...