相机内参标定理论篇------相机模型选择
相机种类:
当拿到一款需要标定内参的相机时,第一个问题就是选择那种的相机模型。工程上相机类型的划分并不是十分严格,一般来说根据相机FOV可以把相机大概分为以下几类:
长焦相机:<=
标准相机:~
;
广角相机:~
;
鱼眼相机:>。
这里按角度的划分并不是绝对严格,临界处的相机用两种模型中的任意一种都可以。
有时也可能会遇到变焦相机和定焦相机之分,但变焦相机在标定内参时也需要固定焦距,因此也可以划分到上面几类。这里需要注意内参和焦距的严格对应的,当调焦后需要重新标定相机内参。
不同角度的相机需要选择不同的相机模型来标定相机内参。相机模型又分为投影模型和畸变模型。接下来分别进行讨论。
长焦相机:
长焦相机的标定一般采用针孔相机模型,但在实际标定中我们很难通过标定板来标定长焦相机。长焦相机的景深太大,普通标定板由于尺寸较小会导致其在采集的图像中所占区域太小,无法提供足够的约束来标定外参。如果强行在近处采集标定板图像,会造成图像上标定图像模糊不清,从而导致角点提取误差较大,甚至失败。因此标定时计算外参会有非常大的误差,又因为相机内参和外参在投影时具有耦合的效应,即使重投影误差非常小也无法保证内参的正确性。这也是为什么重投影误差只能作为内参精度的参考,而无法作为衡量标准。
所以一般来说不建议个人去标定长焦相机,即使标定出来结果也很有可能是错误的。之前笔者还是小白的时候尝试使用标定板标定长焦相机,虽然重投影误差很小但内参精度较差,点云投影效果还没有使用相机厂商提供的参考内参值精确。如果必须自己标定的话也不建议用标定板的方式,需要设计新的方法,核心是保证参照物能够提供足够的约束。
标准相机:
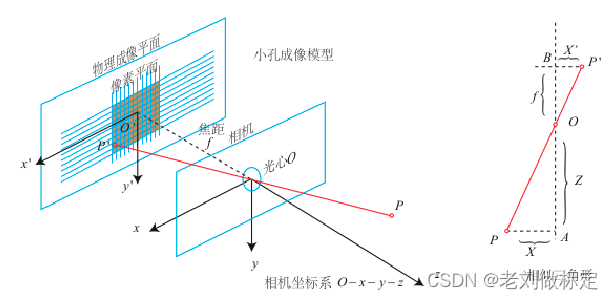
针对标准相机工程上采用针孔相机模型标定。其原理类似于小孔成像,不同之处在于为了增加透光量采用凸透镜。其投影模型为针孔投影模型,原理如下图所示:
接下来考虑其畸变模型,这里需要了解一下概念:径向畸变和切向畸变。
一般来说,制造透镜很难保证曲率和设计的一致,曲率制造的误差会造成相机成像是在径向产生误差即径向畸变。径向畸变主要有以下两种:桶型畸变和枕型畸变。

径向畸变主要描述畸变量和像素到图像中心距离的关系,后续会在具体公式讨论。
同样安装时镜头和成像平面无法保证绝对平行,因此会产生切向畸变:

切向畸变主要描述成像平面和光轴之间的倾斜角度。因此针孔相机模型的畸变模型是径向切向畸变模型。
接下来看如何将相机坐标系下的点投影到图像上:相机坐标系->图像坐标系->像素坐标系。
具体公式如下:
一般投影时先对空间三维点归一化:
其中u v是无畸变点,r描述相机坐标xy轴是否垂直,一般情况下为0。接下来对点加径向畸变:
其中k1 k2 k3是径向畸变参数。有时会遇到k4 k5,也是径向畸变参数,不过一般用到k3就行了。因为径向畸变是泰勒展开的多项式拟合,用到太多畸变参数就会存在过拟合问题反而效果不好。
上面提到的枕型畸变和桶型畸变与k的取值有关,当k都大于零时就会产生枕型畸变,反之则会产生桶型畸变。
接下来再加上切向畸变:
以上就是相机坐标系下点投影到图像上像素的整个过程。
广角相机:
广角相机和鱼眼相机其实都属于鱼眼相机的范畴,只是标定时选择的相机模型不一样。在介绍接下来几种相机模型前还是简单介绍鱼眼相机相关的基础知识以方便理解。

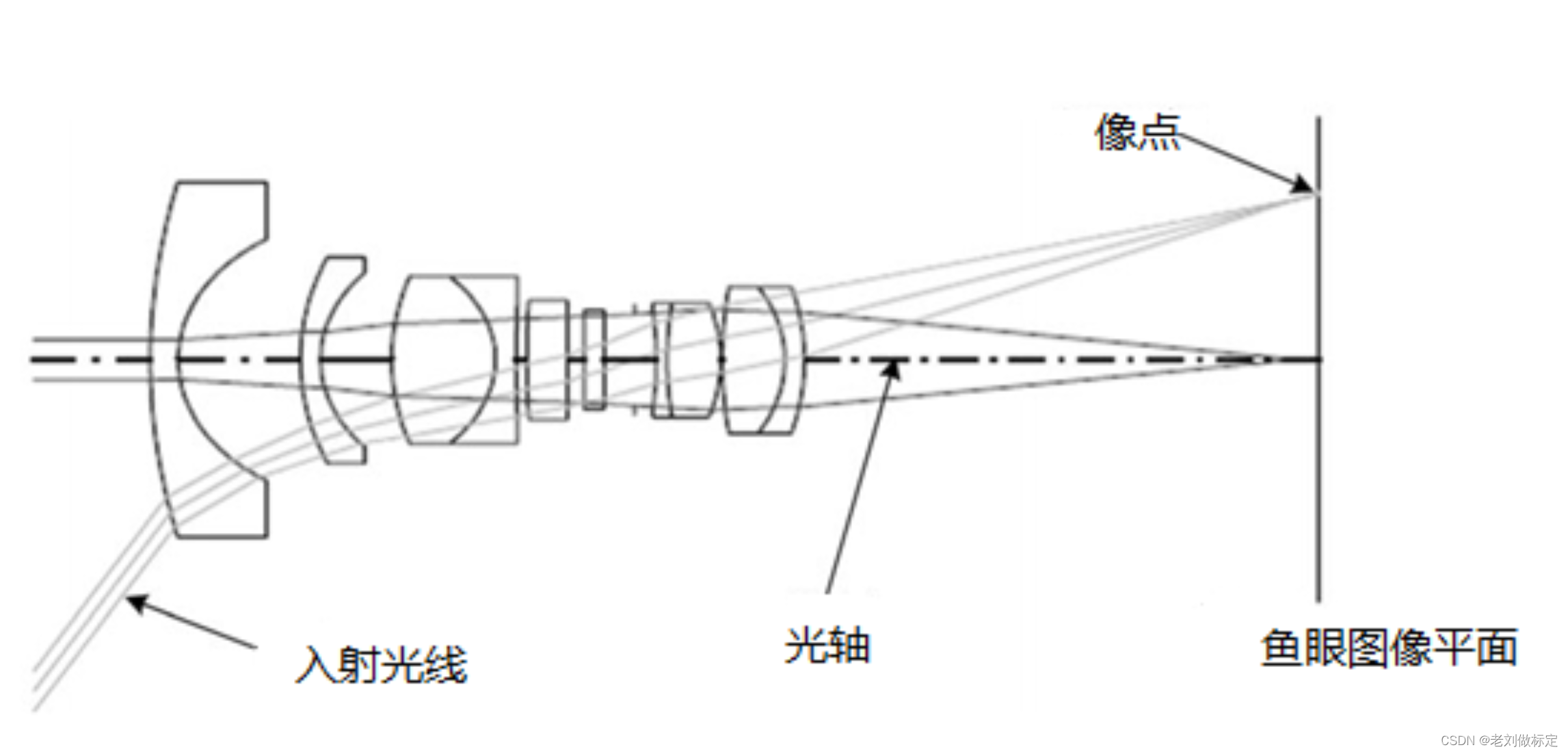
你以为的鱼眼相机 实际的鱼眼相机
我们知道鱼眼相机的初衷是为了让相机看到尽可能大的视野,也就是尽可能将场景中的物体投影到图像上,因此鱼眼相机通过组合多个镜头将光线多次折射到图像平面上。鱼眼相机需要根据某种投影模型进行设计,常见的设计模型主要分为四种:等距投影模型、等立体角投影模型、正交投影模型和体视投影模型。其投影过程如下图所示,除了f*tan()对应针孔投影模型外,其它四种对应上面四种。
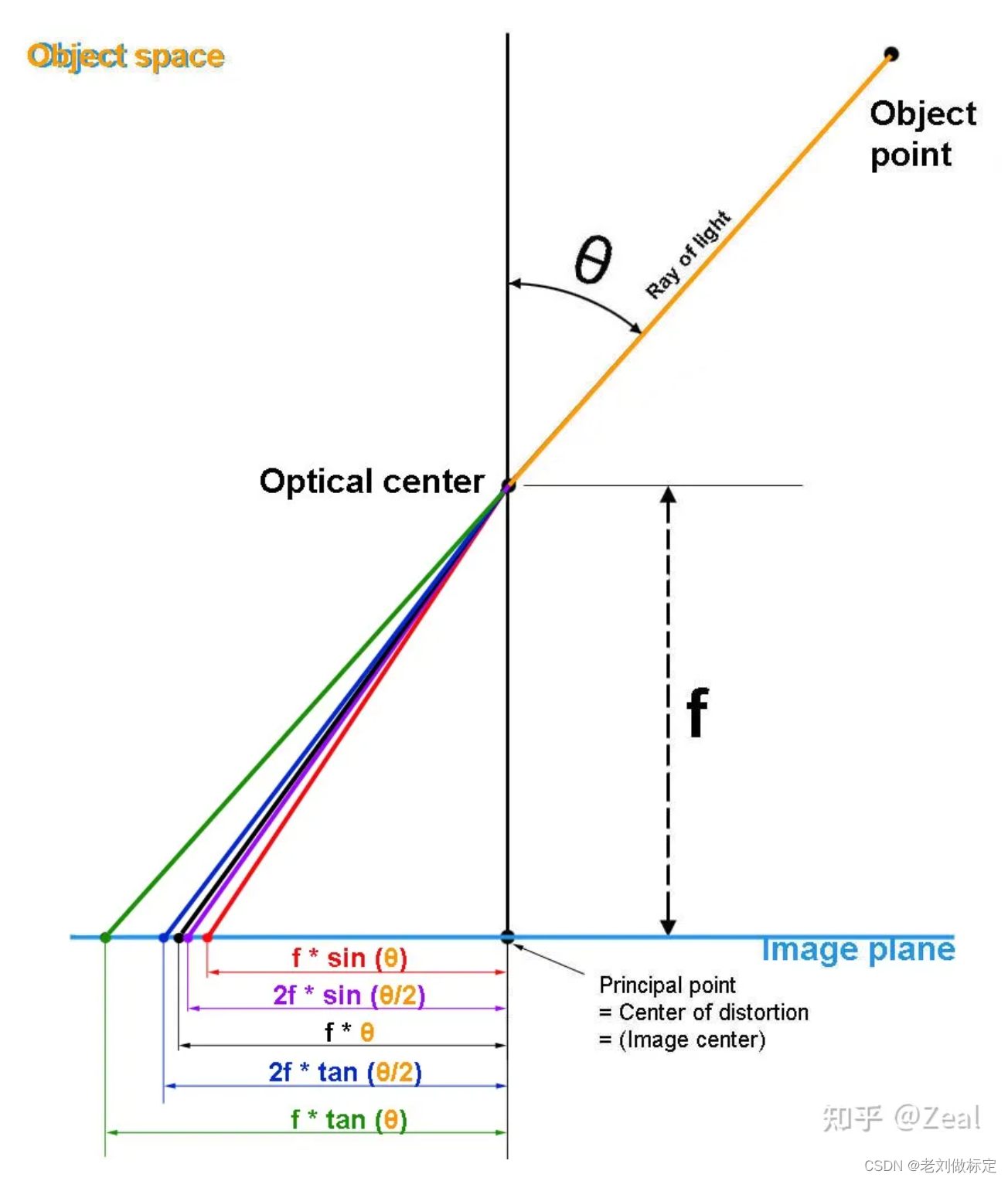
鱼眼相机四种投影模型其中最常用的是等距相机模型,所以主要对等距相机模型进行讨论,其它模型感兴趣自己上网搜索。等距相机模型:

投影公式为:r = f * ,r为成像的高,
为入射角。该模型描述成像的像高和入射角成正比。
广角相机最好选择等距相机模型,OpenCV中使用的模型是由Kannala提出的一种鱼眼相机的一般近似模型。是在等距投影模型的基础上提出来的。接下来对OpenCV中相机模型进行分析。整体过程如下图所示:
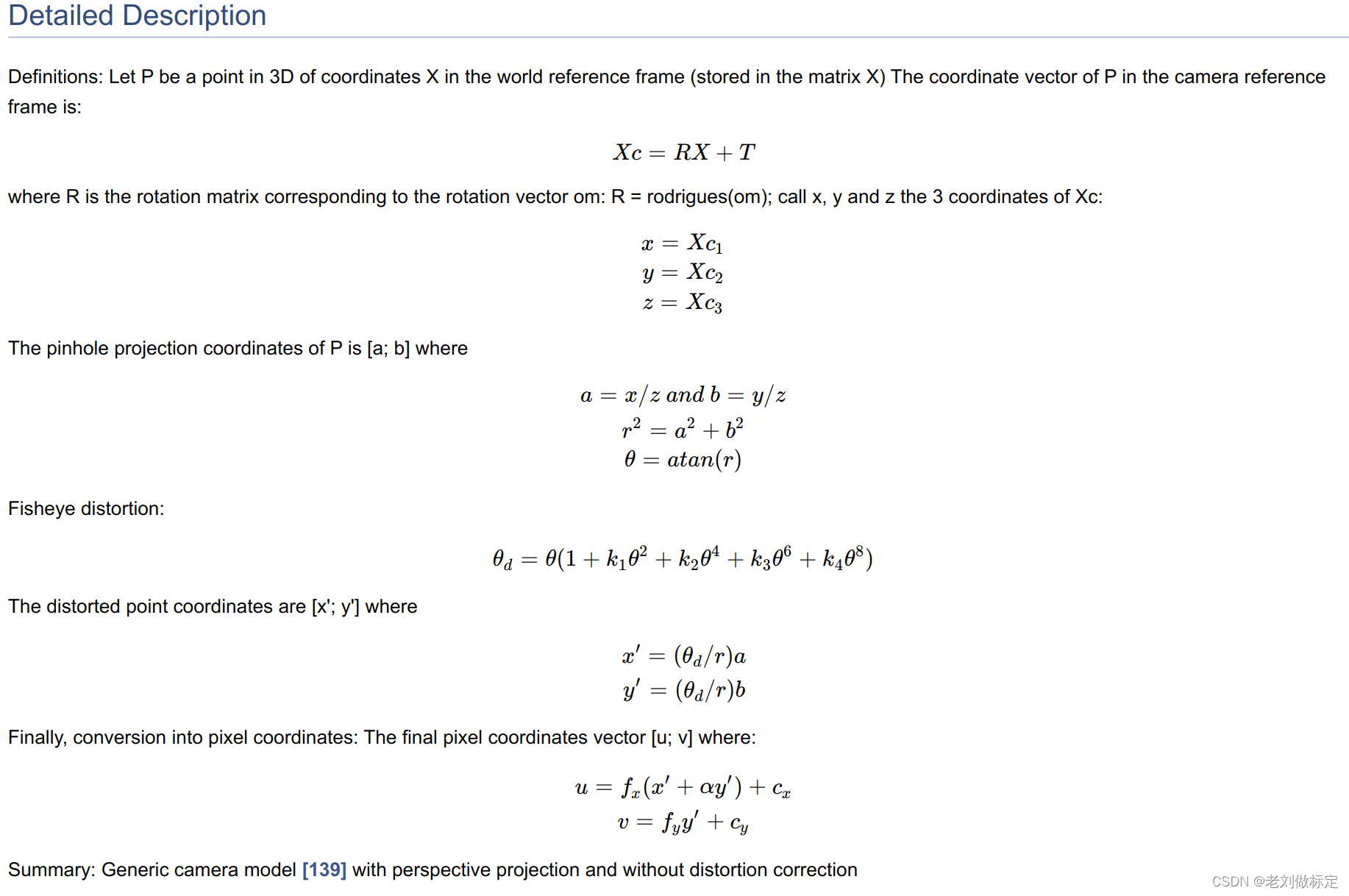
这里主要是利用相机模型将世界坐标系下点投影到图像上的过程。第一步是将世界坐标系的点通过外参转到相机坐标系下,然后转到归一化平面上。这时考虑畸变对投影的影响,也可以看出等距相机模型的畸变只考虑了径向畸变没有考虑切向畸变。
已知等距相机模型r = f * ,在实际中很难按设计模型制造,因此使用多项式拟合。最后得到包含畸变后新的
d。接着计算归一化平面上带畸变的投影点
。然后利用针孔投影模型将点投影到图像上。上面公式中有一个
,这个是表征图像平面xy是否垂直的参数,很多情况下默认为0。
鱼眼相机:
作者个人经验,小于180度的相机可以使用OpenCV中相机模型来标定相机,但是如果相机度数大于180度时OpenCV标定出来的效果并不是十分好。
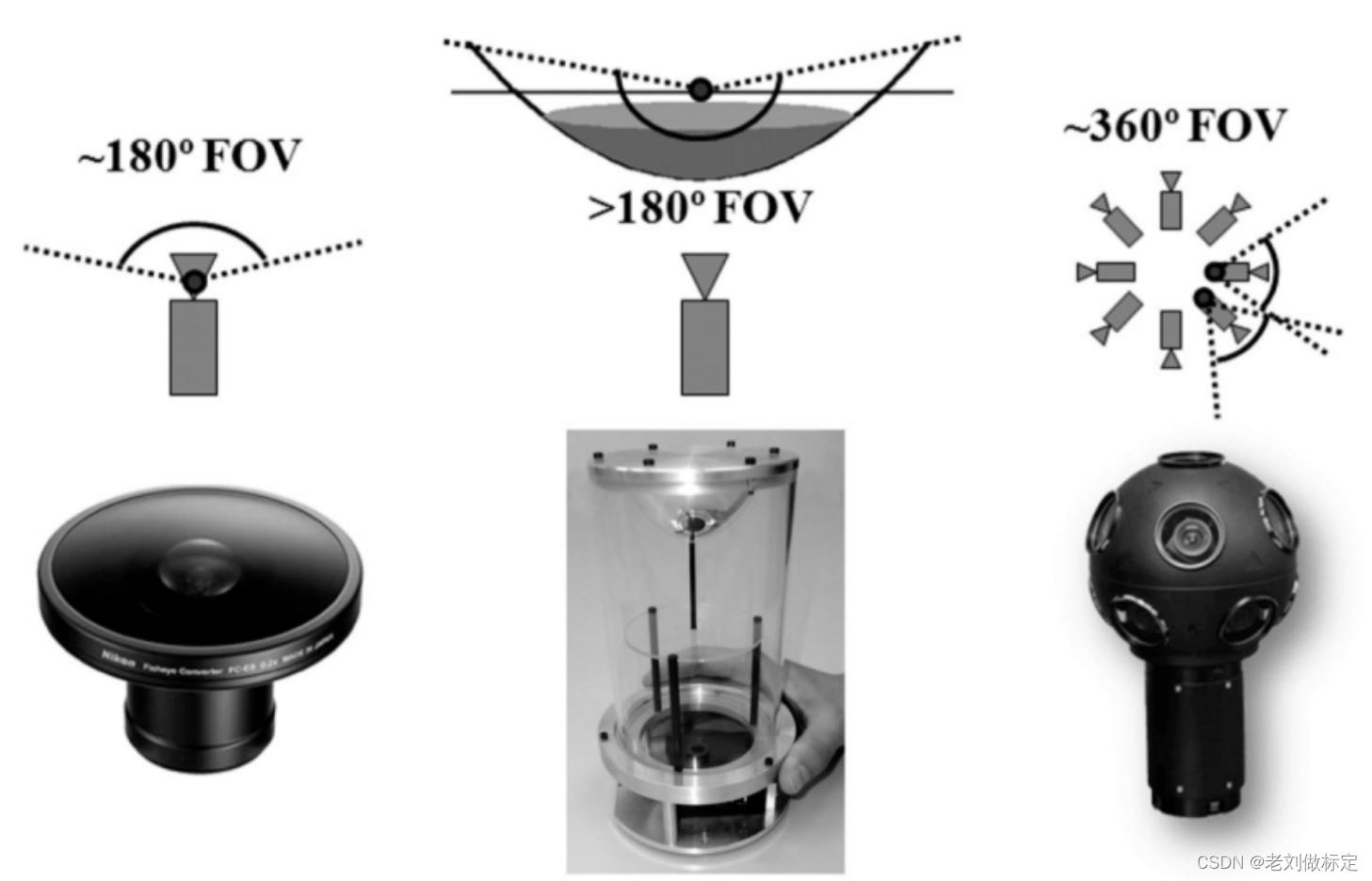
这时标定相机可以用的相机模型有kalibr的MEI模型或是Davide Scaramuzza的ocam相机模型。但在实际应用中ocam相机模型更好一些。
相关文章:
相机内参标定理论篇------相机模型选择
相机种类: 当拿到一款需要标定内参的相机时,第一个问题就是选择那种的相机模型。工程上相机类型的划分并不是十分严格,一般来说根据相机FOV可以把相机大概分为以下几类: 长焦相机:< 标准相机:~&…...
java设计模式学习之【状态模式】
文章目录 引言状态模式简介定义与用途实现方式 使用场景优势与劣势在Spring框架中的应用状态示例代码地址 引言 设想你正在使用一个在线视频播放器观看电影。随着你的互动,播放器可能处于不同的状态:播放、暂停、缓冲或结束。每个状态下,播放…...

使用aspose.Words更新表格列宽
public static bool UpdateTableStyle(string filePath) { try { Document doc new Document(); //样式 Style style doc.Styles.Add(StyleType.Paragraph, "cellStyle"); style.Font.Name "simsun"; PageSetup pageSet doc.Sections[0].PageSetup; pa…...
pycharm 工具栏不见了
新版pycharm后, 菜单栏和工具栏不见了 目录 我发现的解决方法: 其他旧版的解决方法: 我发现的解决方法: 其他旧版的解决方法: 另外,一些使用pycharm的新手可能会由于不熟悉软件的功能而误操作ÿ…...
图灵日记之java奇妙历险记--类和对象
目录 类的定义和使用类的定义格式 类的实例化类和对象的说明 this引用this引用的特性 对象的构造及初始化就地初始化构造方法 封装包导入包中的类自定义包 static成员static修饰成员变量static修饰成员方法 代码块代码块概念及分类构造代码块静态代码块 匿名对象 类的定义和使用…...

Kotlin 枚举类
使用 enum 修饰符;每个枚举常量都是一个对象,枚举常量以逗号分隔 // 枚举类 enum class Direction {NORTH, SOUTH, WEST, EAST }// 每一个枚举都是枚举类的实例,所以可以这样初始化 enum class Color(val rgb: Int) {RED(0xFF0000),GREEN(0x…...

可运营的Leadshop开源商城小程序源码 +H5公众号+带视频教程
源码简介 Leadshop是一款出色的开源电商系统,具备轻量级、高性能的特点,并提供持续更新和迭代服务。该系统采用前后端分离架构(uniappyii2.0),以实现最佳用户体验为目标。 前端部分采用了uni-app、ES6、Vue、Vuex、V…...

Qt底层机制之对象树总结
Qt对象树是Qt框架中的一个重要概念,它用于管理对象之间的关系和生命周期。除了常规的对象树结构,Qt还提供了一些特殊的用法来扩展对象树的功能和灵活性。 1. 父子关系:Qt对象树通过设置父对象来建立父子关系。父对象负责管理子对象的内存分配和释放。这种关系可以通过`setP…...

QT C++ TCP Socket 请求心知天气
0.0 相关连接代码部分头文件具体实现 相关连接 心知天气官方天气图标 心知天气官网 代码部分 头文件 #include <QtNetwork> #include <QNetworkAccessManager> #include <QDebug> #include <QJsonValue> #include <QJsonArray> #include &l…...

双向链表的实现及头尾插入删除
双链表的增删查改 一.双向链表的初始化二.创建返回链表的头结点三.双向链表销毁四. 双向链表打印五.双向链表尾插六. 双向链表尾删七. 双向链表头插八.双向链表头删九.双向链表的查找十.双向链表在pos的前面进行插入十一. 双向链表删除pos位置的节点 一.双向链表的初始化 Lis…...
C语言—每日选择题—Day62
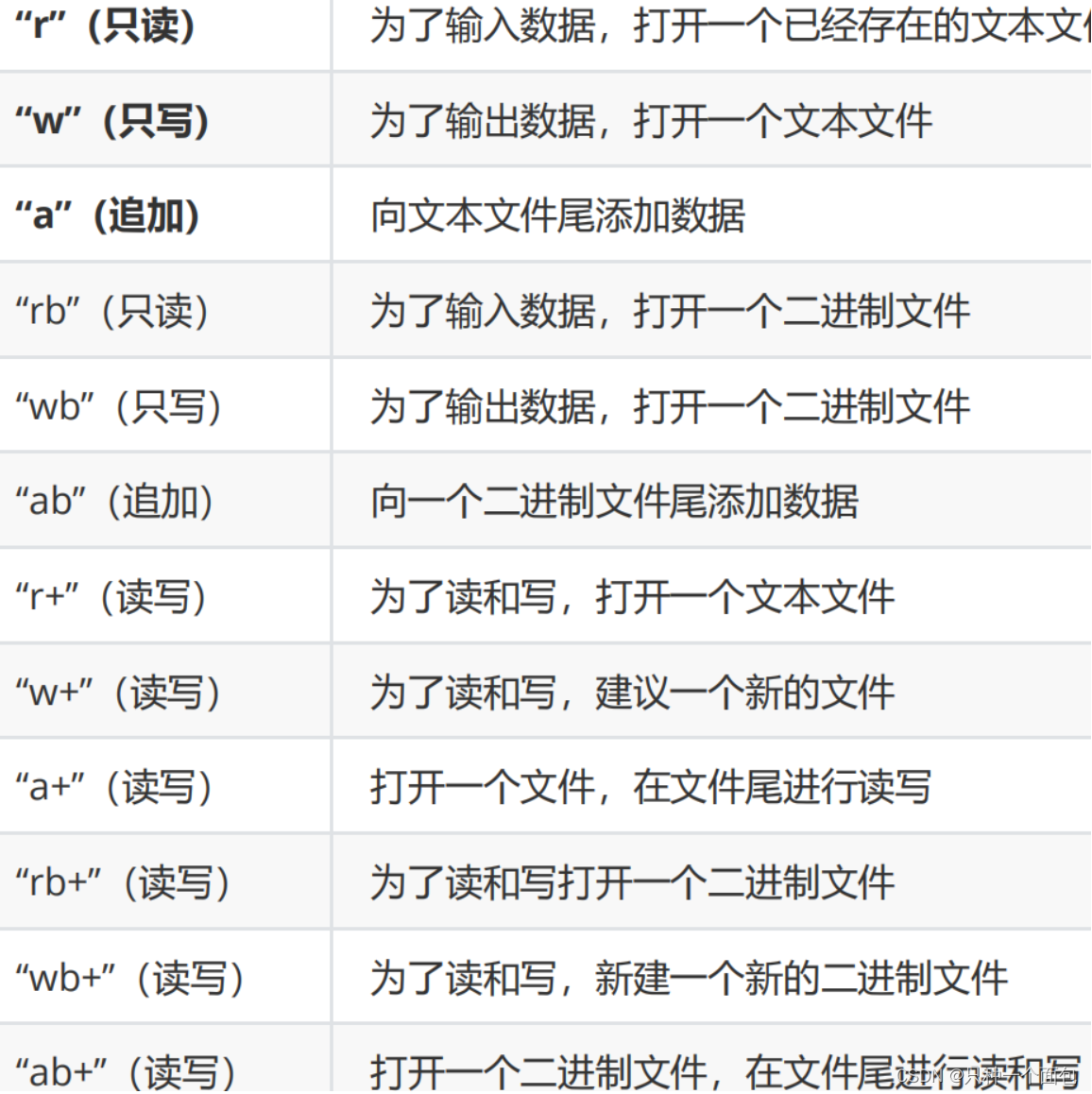
第一题 1. 在使用标准C库时,下面哪个选项使用只读模式打开文件? A:fopen("foo.txt", "r") B:fopen("foo.txt", "r") C:fopen("foo.txt", "w") D…...
基于 Sentry 的前端监控系统搭建(Linux)
一、前言 随着技术这几年的发展与沉淀,线上数据指标监控也变得尤为重要,研发人员和运营人员需要对线上的产品指标有所感知,同时风险也需要及时暴露,很多公司开始自建监控系统,但对于一些定制化要求不是特别高的团队&a…...

【C++入门到精通】Lock_guard与Unique_lock C++11 [ C++入门 ]
阅读导航 引言一、RAII机制1. 概念2. 原理3. 优点 二、Lock_guard1. 官方文档2. 概念3. 底层类模版4. 使用示例 三、Unique_lock1. 官方文档2. 概念及底层3. 使用示例 四、总结温馨提示 引言 在C11标准中,为了更方便地使用互斥锁(Mutex)来保…...
电路设计(8)——计时器的multism仿真
1.功能设计 这是一个计时电路,在秒脉冲的驱动下,计时器开始累加,6个数码管分别显示计时的 时:分:秒。 仿真图如下所示: 左边的运放构成了振荡电路,可以产生脉冲波。这个脉冲波给计时电路提供基准…...

Jmeter测试实践:文件下载接口
一 Jmeter步骤 1.打开jmeter4.0,新建测试计划,添加线程组。根据实际情况配置线程属性。 2.添加HTTP请求。根据接口文档进行配置。 Basic部分修改如下,Advanced部分保持默认。这里的参数id是文件的id,我进行了参数化,…...
)
PyQt5实现学生管理系统第三天(下)
目录 一:学生课程导航 二:搜索框 三:查询 四:页面数据展示逻辑 上一节,我们介绍了课程管理的课程查询导航的功能。这一节我们介绍下学生课程的功能实现,因为学生课程只有一个查询列表,内容相对简单,所以我们在这一节也重点讲述下我们页面的展现逻辑。 一:学生课程…...
第4章 | 安徽某高校《统计建模与R软件》期末复习
第4章 参数估计 参数估计是统计建模的关键步骤之一,它涉及根据样本数据推断总体参数的过程。在统计学中,参数通常用于描述总体的特征,如均值、方差等。通过参数估计,我们可以利用样本信息对这些未知参数进行推断,从而…...
)
localforage本地存储(融合Web Storage,Web SQL Database,ndexedDB三种前端存储)
介绍 localForage 是一个快速而简单的 JavaScript 存储库。通过使用异步存储(IndexedDB 或 WebSQL)和简单的类 localStorage 的 API ,localForage 能改善 Web 应用的离线体验。 在不支持 IndexedDB 或 WebSQL 的浏览器中,localF…...
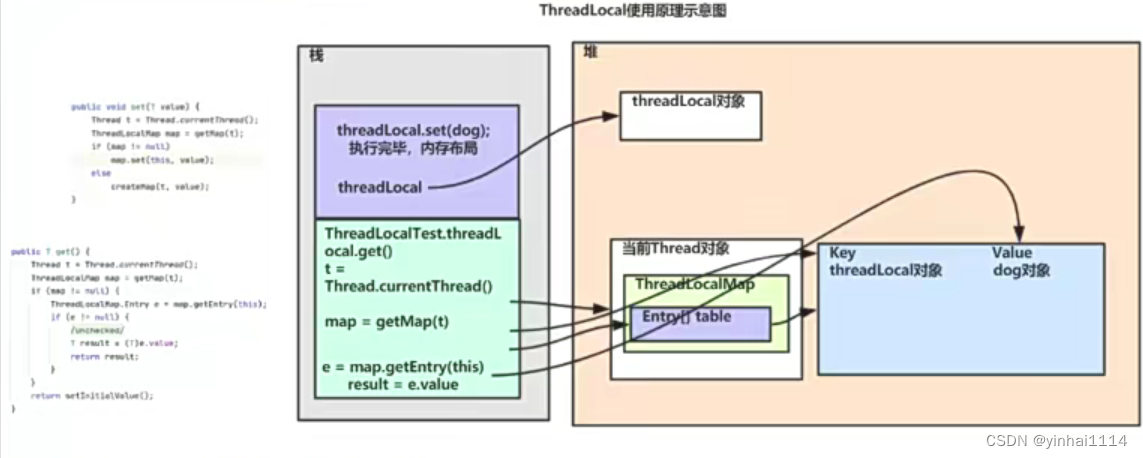
【JavaWeb学习笔记】17 - ThreadLocal
项目代码 https://github.com/yinhai1114/JavaWeb_LearningCode/tree/main/threadlocal/src/com/yinhai/thread 目录 项目代码 一、什么是ThreadLocal? 二、ThreadLocal快速入门 三、源码解读 一、什么是ThreadLocal? 1. ThreadLocal的作用,可以实现在同一个线…...

【ARMv8M Cortex-M33 系列 1 -- SAU 介绍】
文章目录 Cortex-M33 SAU 介绍SAU 的主要功能包括SAU 寄存器配置示例 Cortex-M33 SAU 介绍 在 ARMv8-M 架构中,SAU(Security Attribution Unit)是安全属性单元,用于配置和管理内存区域的安全属性。SAU 是 ARM TrustZone 技术的一…...

springboot 百货中心供应链管理系统小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,百货中心供应链管理系统被用户普遍使用,为方…...
使用rpicam-app通过网络流式传输视频)
树莓派超全系列教程文档--(62)使用rpicam-app通过网络流式传输视频
使用rpicam-app通过网络流式传输视频 使用 rpicam-app 通过网络流式传输视频UDPTCPRTSPlibavGStreamerRTPlibcamerasrc GStreamer 元素 文章来源: http://raspberry.dns8844.cn/documentation 原文网址 使用 rpicam-app 通过网络流式传输视频 本节介绍来自 rpica…...
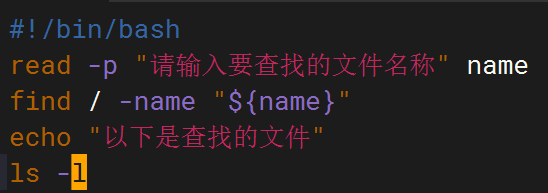
shell脚本--常见案例
1、自动备份文件或目录 2、批量重命名文件 3、查找并删除指定名称的文件: 4、批量删除文件 5、查找并替换文件内容 6、批量创建文件 7、创建文件夹并移动文件 8、在文件夹中查找文件...

基于ASP.NET+ SQL Server实现(Web)医院信息管理系统
医院信息管理系统 1. 课程设计内容 在 visual studio 2017 平台上,开发一个“医院信息管理系统”Web 程序。 2. 课程设计目的 综合运用 c#.net 知识,在 vs 2017 平台上,进行 ASP.NET 应用程序和简易网站的开发;初步熟悉开发一…...
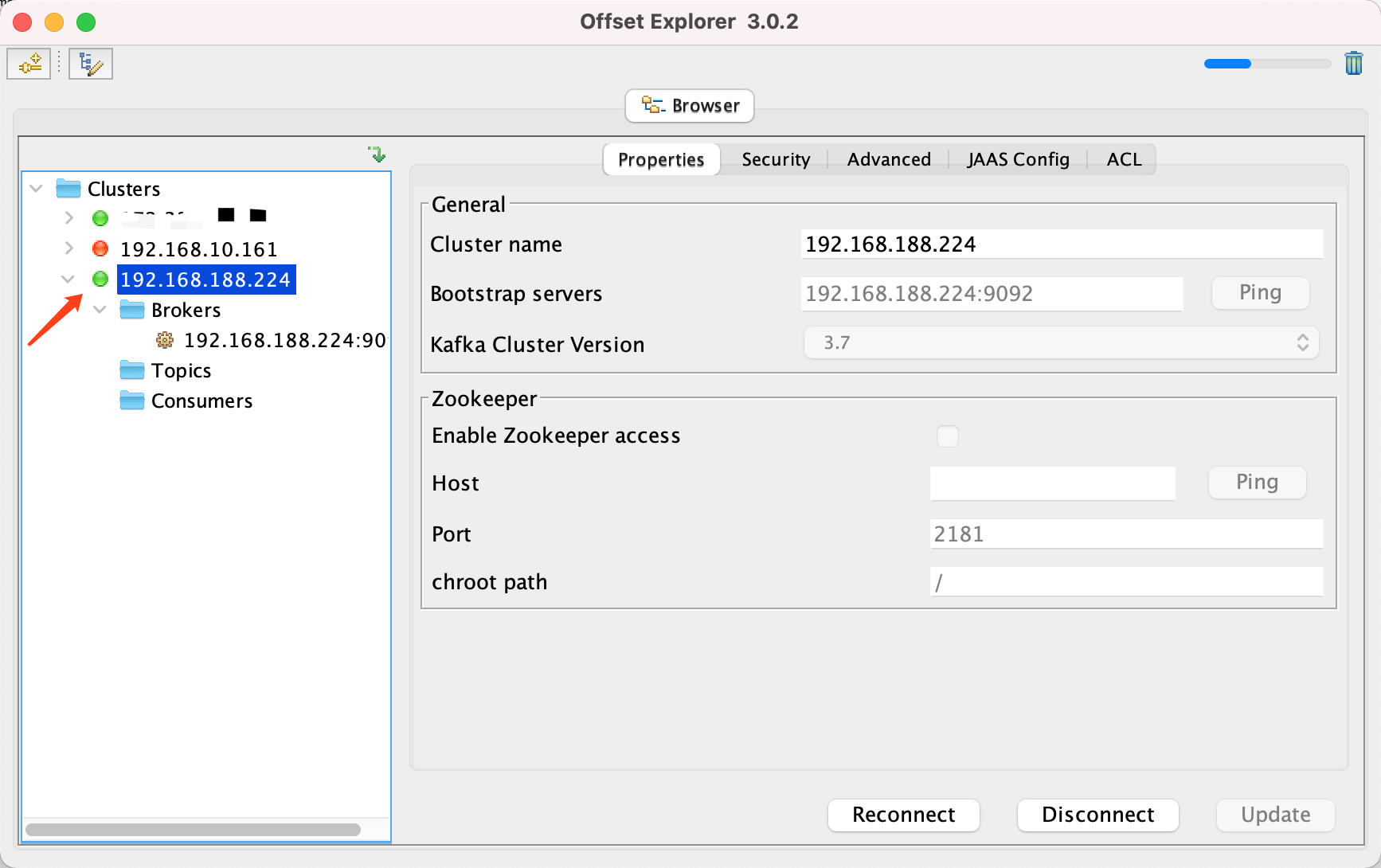
Docker 运行 Kafka 带 SASL 认证教程
Docker 运行 Kafka 带 SASL 认证教程 Docker 运行 Kafka 带 SASL 认证教程一、说明二、环境准备三、编写 Docker Compose 和 jaas文件docker-compose.yml代码说明:server_jaas.conf 四、启动服务五、验证服务六、连接kafka服务七、总结 Docker 运行 Kafka 带 SASL 认…...
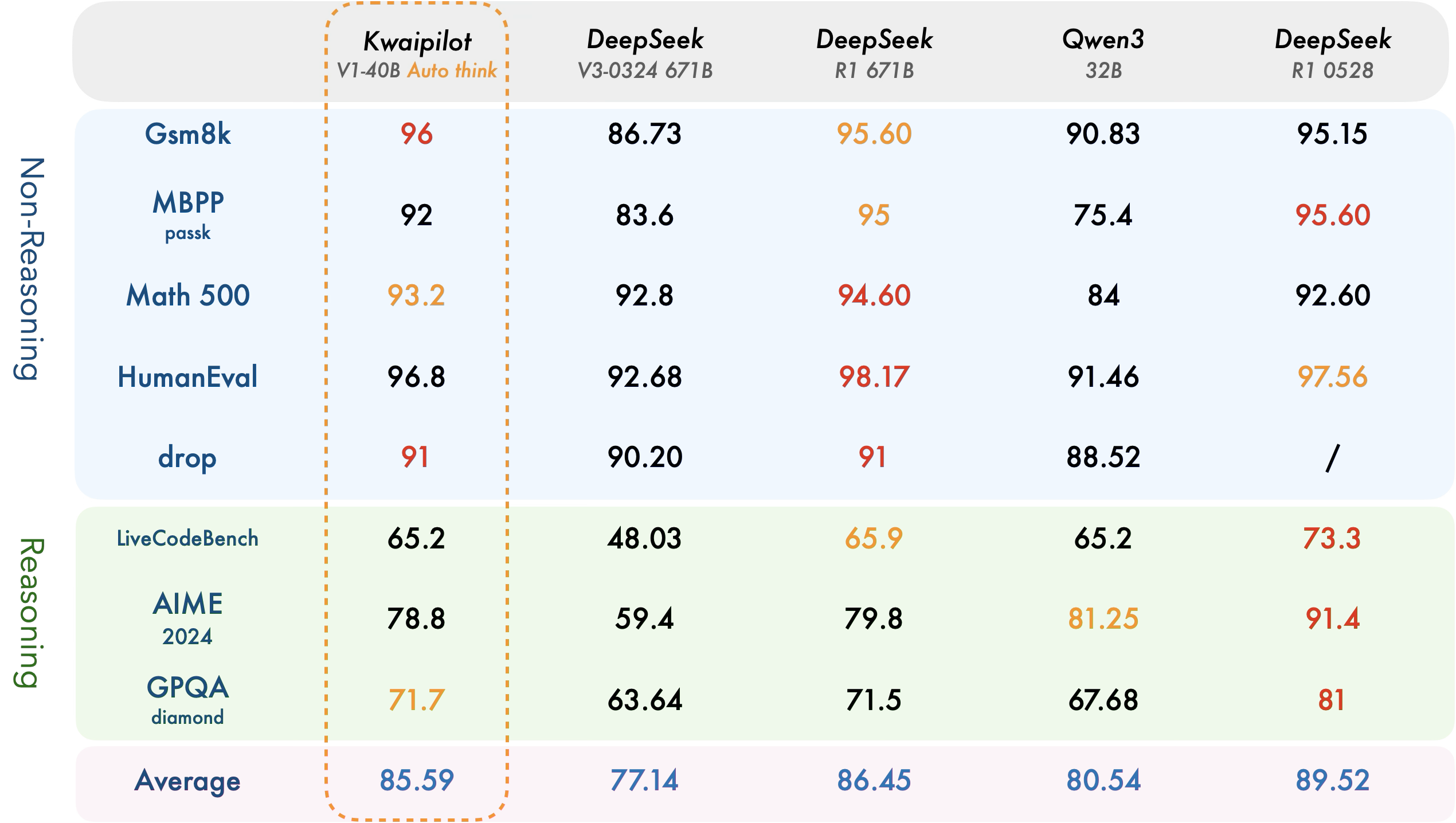
【快手拥抱开源】通过快手团队开源的 KwaiCoder-AutoThink-preview 解锁大语言模型的潜力
引言: 在人工智能快速发展的浪潮中,快手Kwaipilot团队推出的 KwaiCoder-AutoThink-preview 具有里程碑意义——这是首个公开的AutoThink大语言模型(LLM)。该模型代表着该领域的重大突破,通过独特方式融合思考与非思考…...
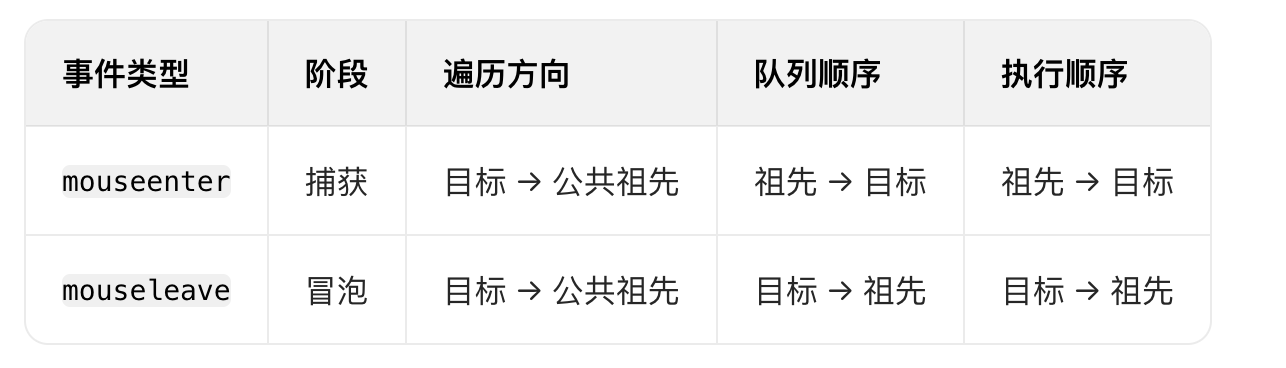
React19源码系列之 事件插件系统
事件类别 事件类型 定义 文档 Event Event 接口表示在 EventTarget 上出现的事件。 Event - Web API | MDN UIEvent UIEvent 接口表示简单的用户界面事件。 UIEvent - Web API | MDN KeyboardEvent KeyboardEvent 对象描述了用户与键盘的交互。 KeyboardEvent - Web…...
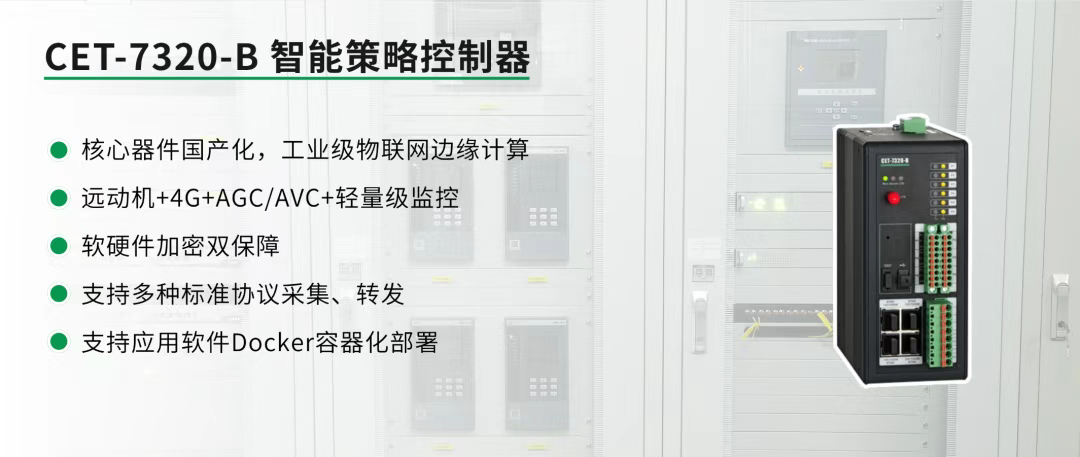
屋顶变身“发电站” ,中天合创屋面分布式光伏发电项目顺利并网!
5月28日,中天合创屋面分布式光伏发电项目顺利并网发电,该项目位于内蒙古自治区鄂尔多斯市乌审旗,项目利用中天合创聚乙烯、聚丙烯仓库屋面作为场地建设光伏电站,总装机容量为9.96MWp。 项目投运后,每年可节约标煤3670…...

MODBUS TCP转CANopen 技术赋能高效协同作业
在现代工业自动化领域,MODBUS TCP和CANopen两种通讯协议因其稳定性和高效性被广泛应用于各种设备和系统中。而随着科技的不断进步,这两种通讯协议也正在被逐步融合,形成了一种新型的通讯方式——开疆智能MODBUS TCP转CANopen网关KJ-TCPC-CANP…...

在WSL2的Ubuntu镜像中安装Docker
Docker官网链接: https://docs.docker.com/engine/install/ubuntu/ 1、运行以下命令卸载所有冲突的软件包: for pkg in docker.io docker-doc docker-compose docker-compose-v2 podman-docker containerd runc; do sudo apt-get remove $pkg; done2、设置Docker…...