毫米波雷达:从 3D 走向 4D
1 毫米波雷达已广泛应用于汽车 ADAS 系统
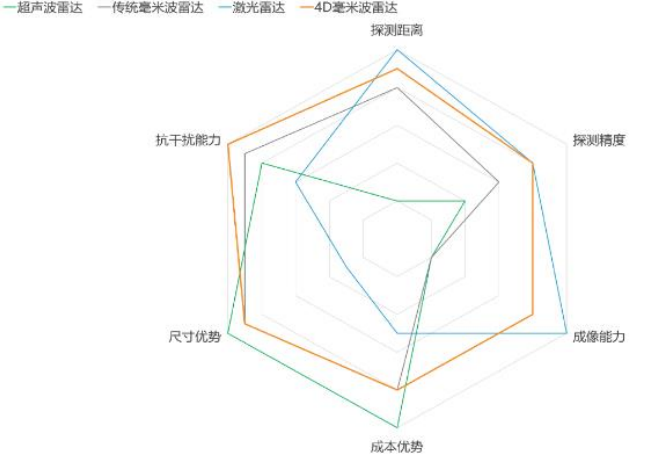




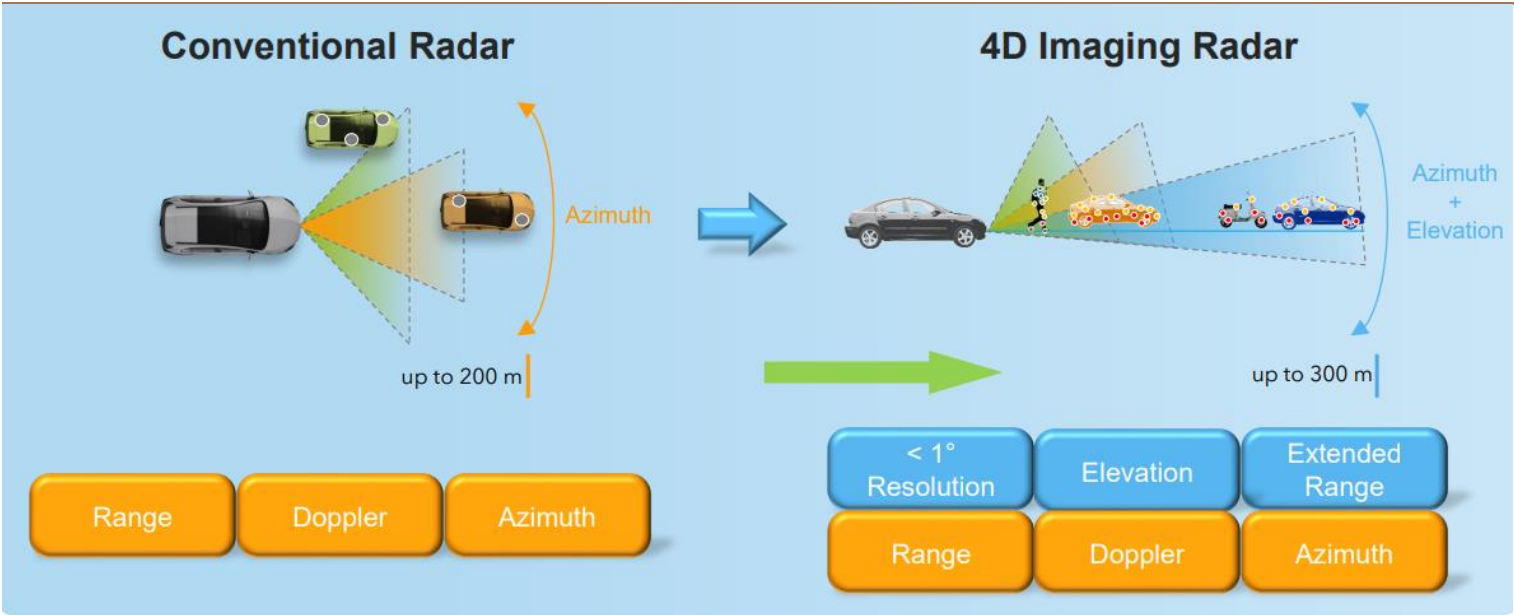
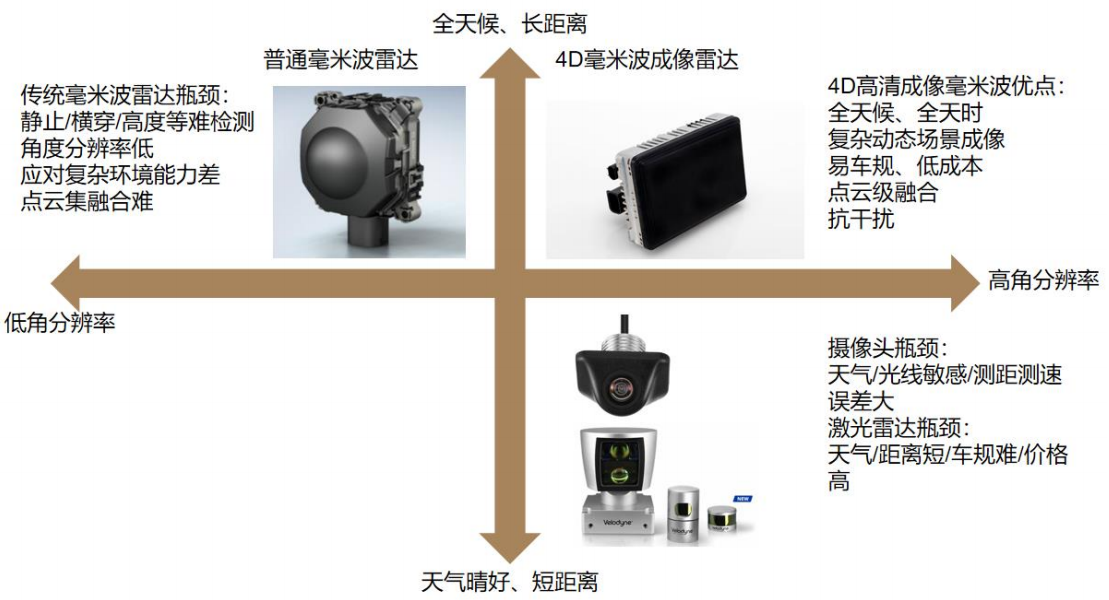
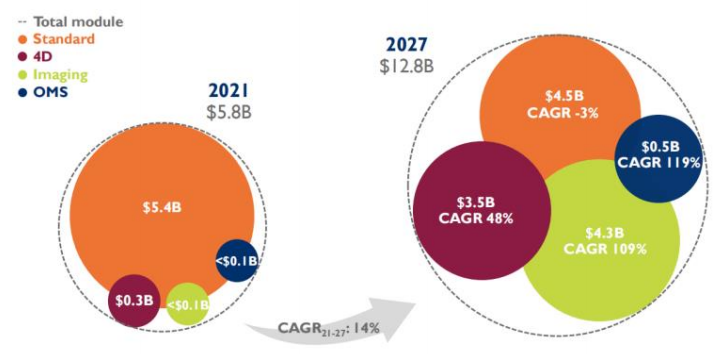
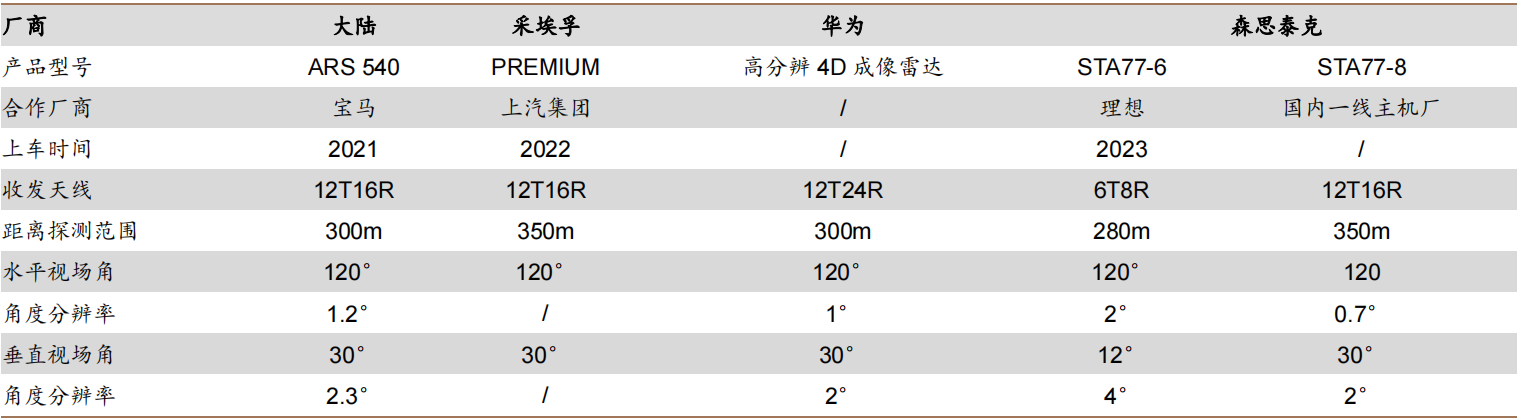
2 4D 毫米波成像雷达:颠覆性、创新性产品

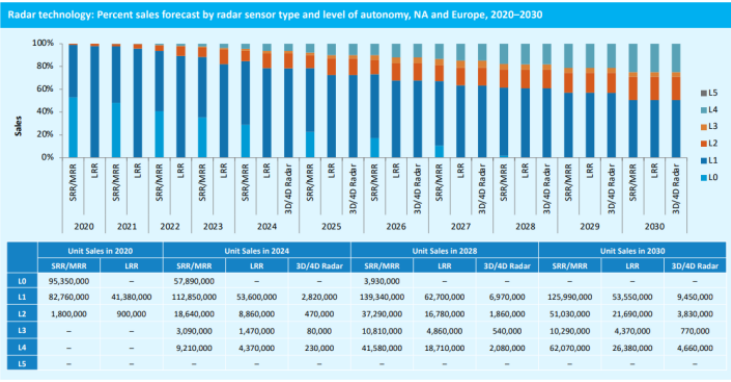
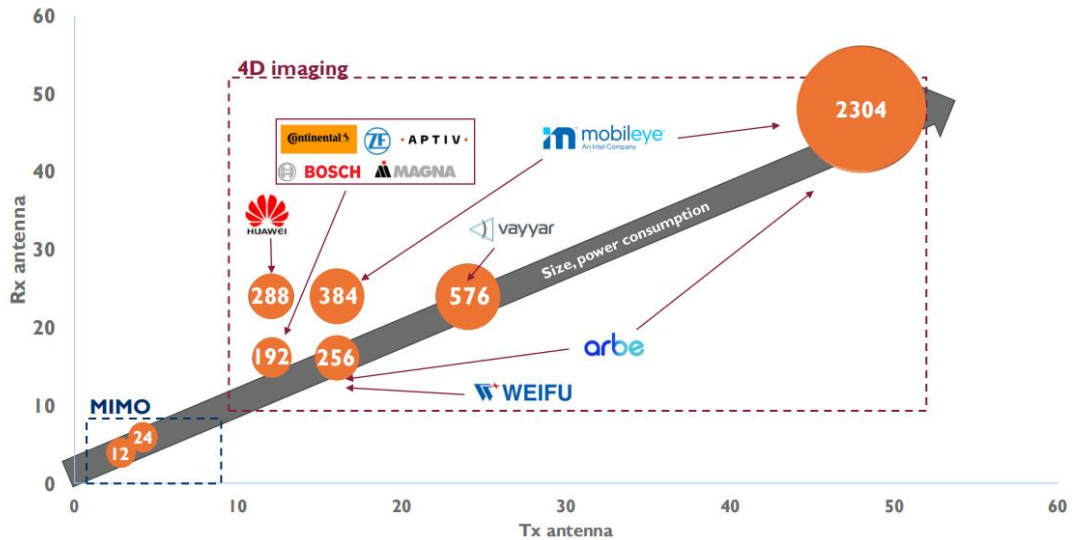
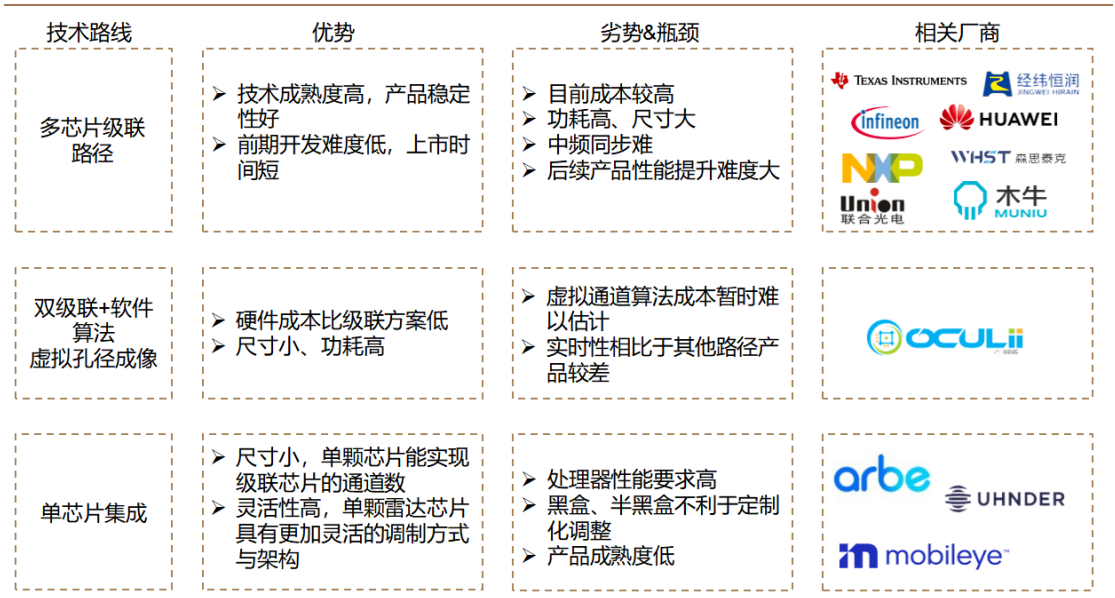
3 4D 毫米波成像雷达技术路线演进


相关文章:
毫米波雷达:从 3D 走向 4D
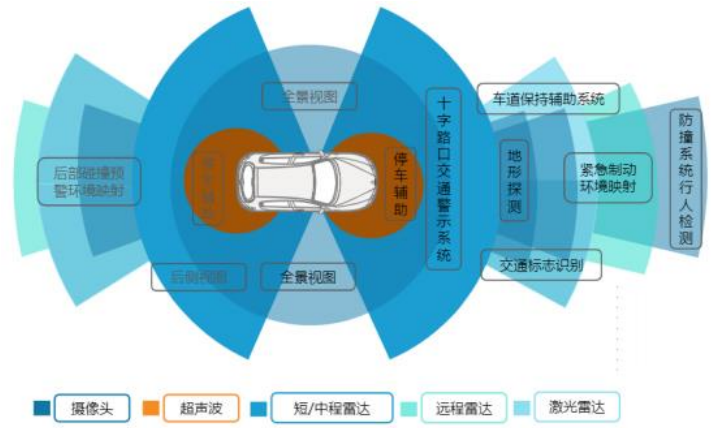
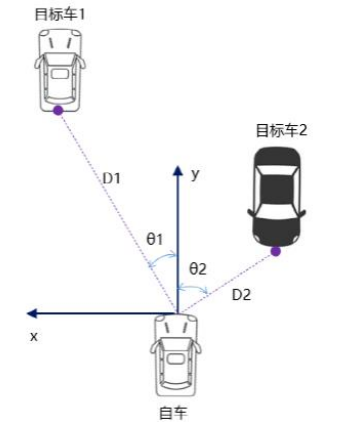
1 毫米波雷达已广泛应用于汽车 ADAS 系统 汽车智能驾驶需要感知层、决策层、执行层三大核心系统的高效配合,其中感知层通过传感器探知周围的环境。汽车智能驾驶感知层将真实世界的视觉、物理、事件等信息转变成数字信号,为车辆了解周边环境、制定驾驶操…...

CENTOS docker拉取私服镜像
概述 docker的应用越来越多,安装部署越来越方便,批量自动化的镜像生成和发布都需要docker镜像的拉取。 centos6版本太老,docker的使用过程中问题较多,centos7相对简单容易。 本文档主要介绍centos系统安装docker和拉取docker私…...

【前端面经】即时设计
目录 前言一面git 常见命令跨窗口通信vue 响应式原理发布订阅模式翻转二叉树Promise.all()扁平化数组面试官建议 二面Event Loop 原理Promise 相关css 描边方式requestAnimationReact 18 新特性JSX 相关react 输出两次函数式编程React 批处理机制http请求头有哪些本地存储性能优…...
前端三件套html/css/js的基本认识以及示例程序
简介 本文简要讲解了html,css,js.主要是让大家简要了解网络知识 因为实际开发中很少直接写html&css,所以不必过多纠结,了解一下架构就好 希望深度学习可以参考MDN和w3school HTML 基础 HTML (Hyper Text Markup Language) 不是一门编程语言,而是一种用来告知浏览器如…...
云计算:OpenStack 配置云主机实例的存储挂载并实现外网互通
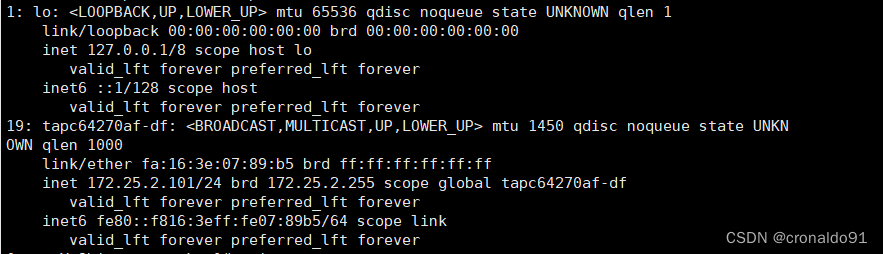
目录 一、实验 1. 环境 2.配置存储挂载 3.云主机实例连接外部网络(SNAT) 4.外部网络连接云主机实例(DNAT) 二、问题 1.云主机 ping 不通外部网络 2.nova list 查看云主机列表报错 3.nova list 与 virsh list --all有何区…...
python/selenium/jenkins整合
1、新建python项目,专门写selenium代码,建议用pytest框架写。 2、把代码上传到代码库中。 3、环境配置: 3.1 在跑jenkins的机器上配置好python环境,需要python --version能在任何地方运行(配置好系统环境变量&#…...

华为路由器ACL操作SSH接口
ACL的定义 访问控制列表(Access Control Lists,ACL)是应用在路由器接口的指令列表。这些指令列表用来告诉路由器哪些数据包可以收、哪些数据包需要拒绝。至于数据包是被接收还是拒绝,可以由类似于源地址、目的地址、端口号等的特…...

Flutter 三点三:Dart Stream
Stream Stream用于接收异步事件Stream 可以接收多个异步事件Stream.listen()方法返回StreamSubscription 可用于取消事件订阅,取消后,不再接收事件 基本使用 Stream.fromFutures([Future.delayed(Duration(seconds: 1),(){return "事件1";})…...

centos 防火墙 设置 LTS
centos 防火墙 设置 LTS https://blog.csdn.net/m0_58805648/article/details/130671008...
SAP缓存 表缓存( Table Buffering)
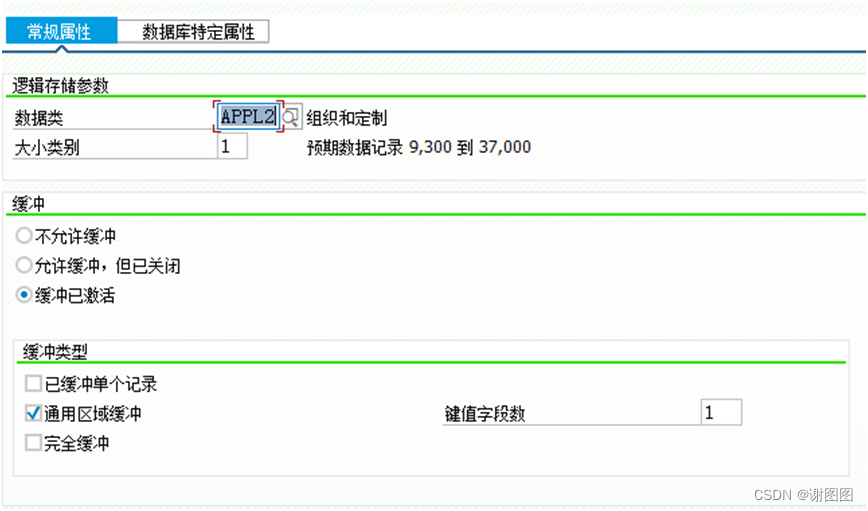
本文主要介绍SAP中的表缓存在查询数据,更新数据时的工作情况以及对应概念。 SAP表缓存的工作 查询数据 更新数据 删除数据 表缓存的概念 表缓存技术设置属性 不允许缓冲: 允许缓冲,但已关闭: 缓冲已激活: 已…...

Mybatis插件入门
专栏精选 引入Mybatis Mybatis的快速入门 Mybatis的增删改查扩展功能说明 mapper映射的参数和结果 Mybatis复杂类型的结果映射 Mybatis基于注解的结果映射 Mybatis枚举类型处理和类型处理器 再谈动态SQL Mybatis配置入门 Mybatis行为配置之Ⅰ—缓存 Mybatis行为配置…...

DOA估计算法——迭代自适应算法(IAA)
1 简介 迭代自适应法 (Iterative Adaptive Approach,IAA)估计算法最早由美国的电气工程师和数学家Robert Schmidt和Roy A. Kuc在1986年的一篇论文"Multiple Emitter Location and Signal Parameter Estimation"中首次提出了这一算法, IAA DOA …...
Python If语句以及代码块的基本介绍
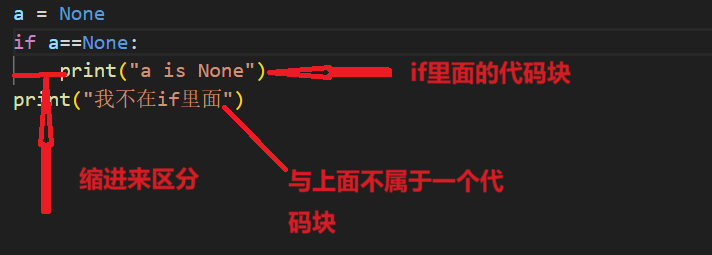
if语句 在编程中if语句是一种根据条件执行不同代码块的控制结构,他根据条件的真假来分支程序的执行路径,所以我们可以通过if语句根据不同情况而执行不同的程序 格式 if [条件(bool值或者计算结果为bool类型的算式)] : a11if a>10:print("a大于10") # --> a大…...
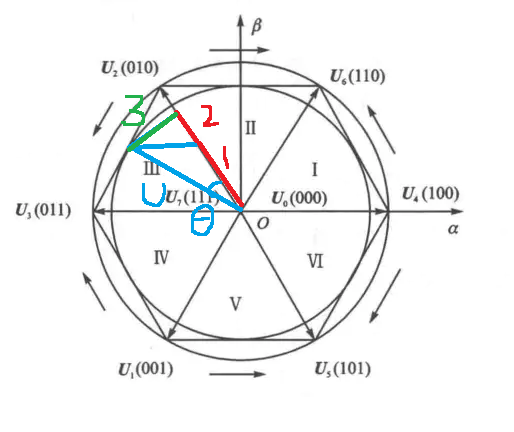
[嵌入式专栏](FOC - SVPWM扇区计算Part1)
文章目录 1 . 概要2 . 扇区计算2.1 扇区Ⅰ计算2.2 扇区Ⅱ计算2.3 扇区Ⅲ计算 3 . 小结 【极客技术传送门】 : https://blog.csdn.net/Engineer_LU/article/details/135149485 1 . 概要 经过扇区判断后,就知道在哪个扇区进行输出了 【Q】但是每个扇区分别输出怎样的结…...

亚马逊美国站ASTM F2613儿童折叠椅和凳子强制性安全标准
ASTM F2613折叠椅和凳子安全标准 美国消费品安全委员会(CPSC)发布的ASTM F2613儿童折叠椅和凳子的强制性安全标准,已于2020年7月6日生效,并被纳入联邦法规《16 CFR 1232儿童折叠椅和凳子安全标准》。 亚马逊要求在美国站上架的儿…...
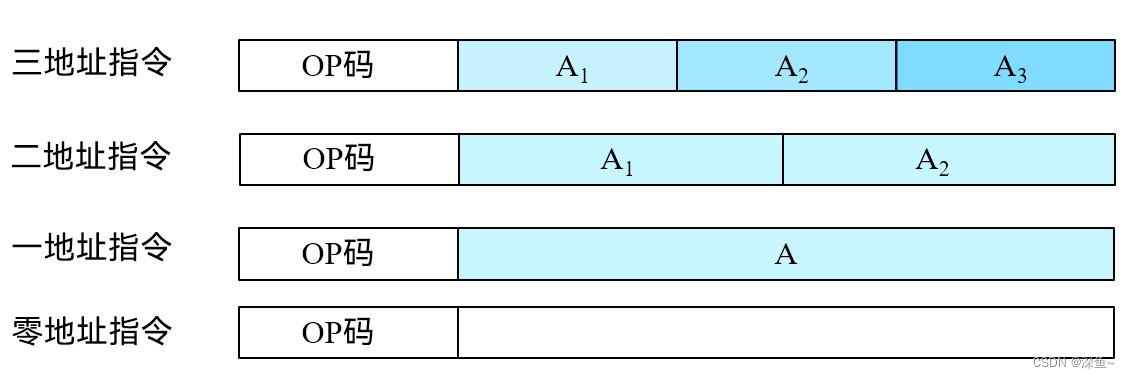
【机组期末速成】指令系统|机器指令概述|操作数类型与操作类型|寻址方式|指令格式
🎥 个人主页:深鱼~🔥收录专栏:计算机组成原理🌄欢迎 👍点赞✍评论⭐收藏 目录 前言: 一、本章考点总览 二、考点分析 1、以下有关指令系统的说法中错误的是( )。 2…...
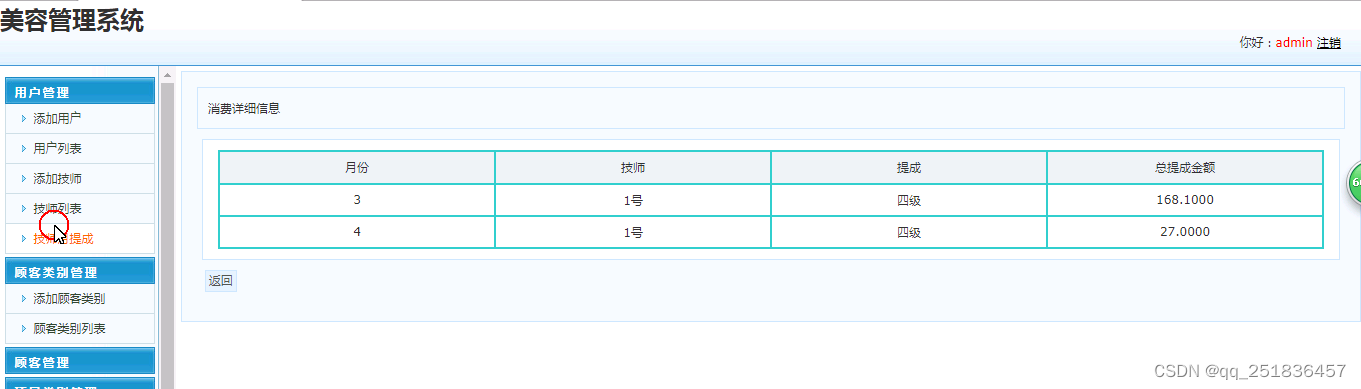
java美容管理系统Myeclipse开发mysql数据库web结构java编程计算机网页项目
一、源码特点 java Web美容管理系统是一套完善的java web信息管理系统,对理解JSP java编程开发语言有帮助,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。开发环境为 TOMCAT7.0,Myeclipse8.5开发,数据库为Mysql5.0&…...
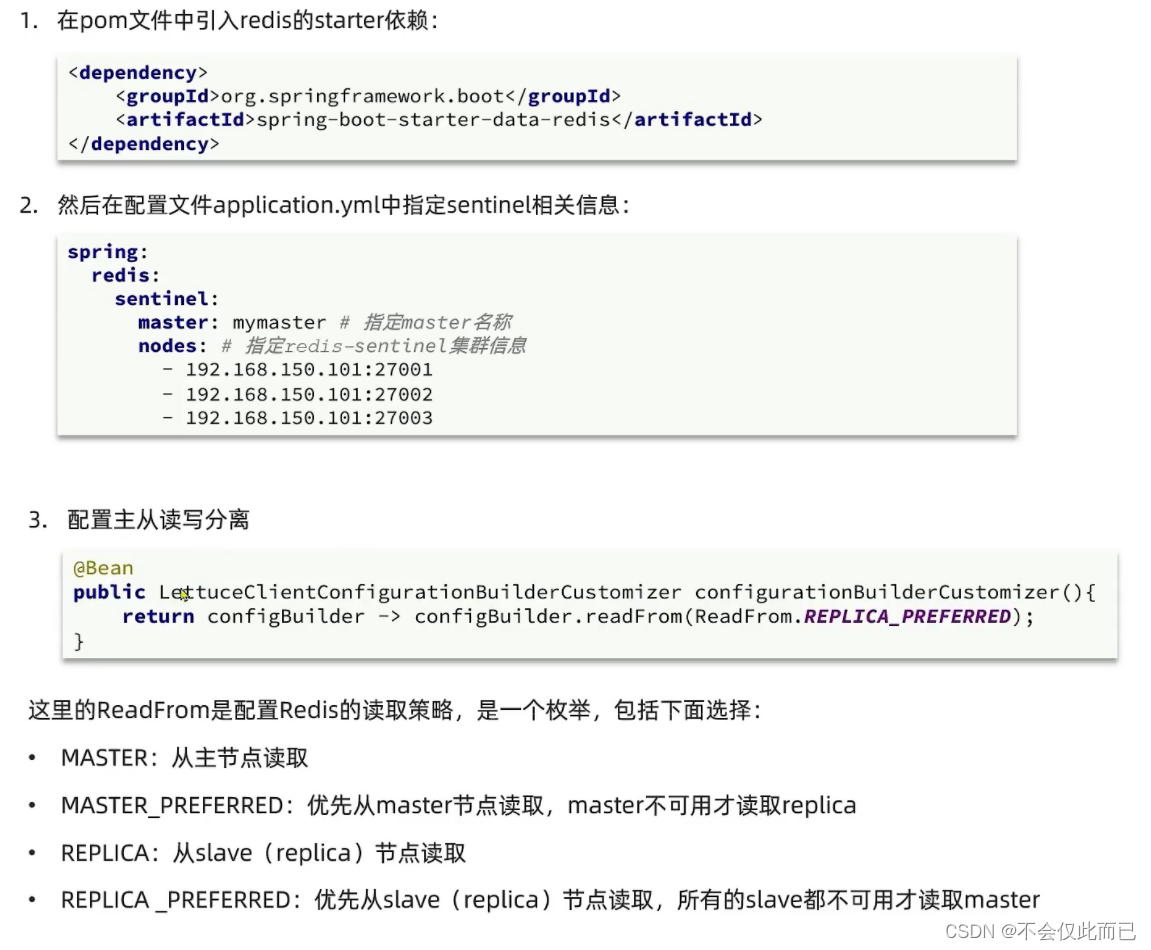
Redis哨兵
1.哨兵介绍 1.1.为何需要哨兵? 为了解决master节点宕机问题,选举salve节点为新的master节点。 1.2.哨兵的作用 1.3.服务状态监控 1.4.选举新的master 1.5.如何实现故障转移 2.搭建哨兵集群 2.1.集群结构 这里我们搭建一个三节点形成的Sentinel集群&…...
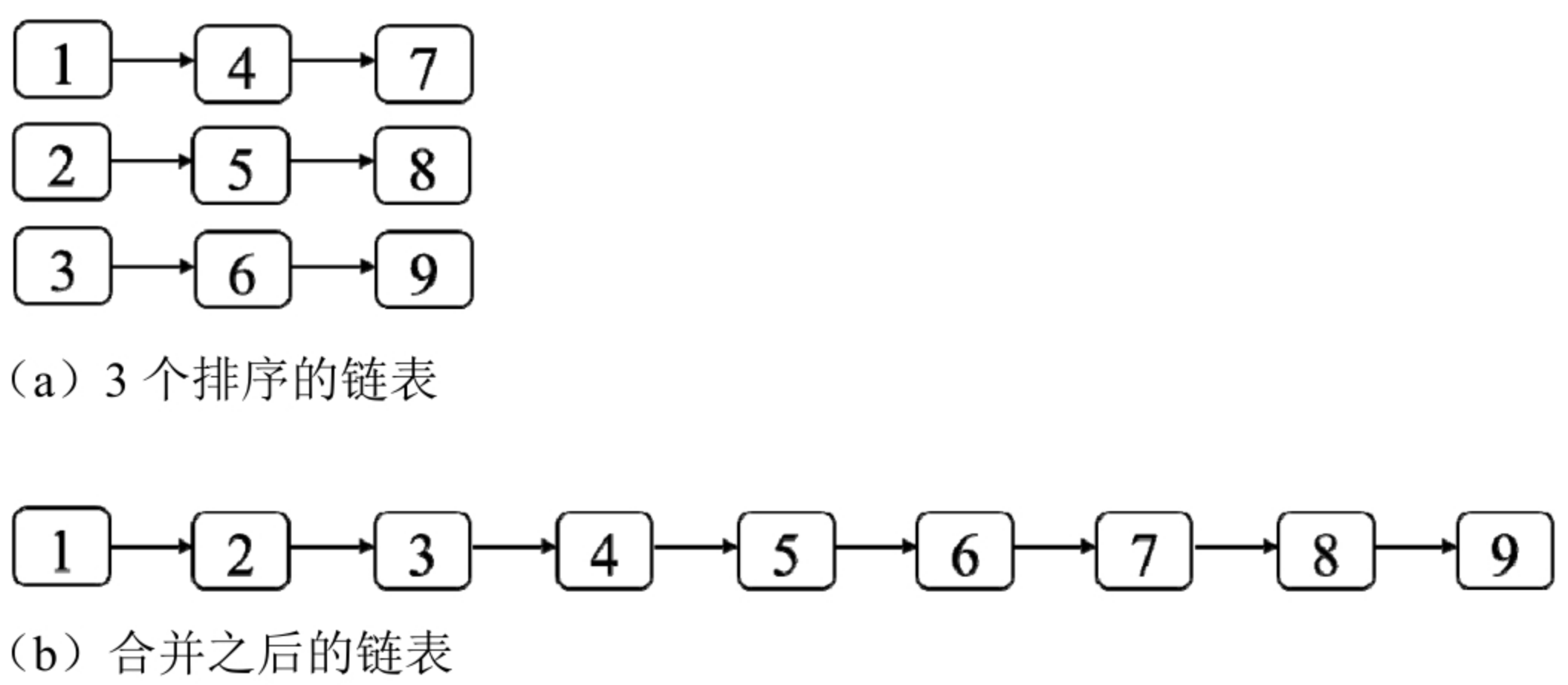
面试算法78:合并排序链表
题目 输入k个排序的链表,请将它们合并成一个排序的链表。 分析:利用最小堆选取值最小的节点 用k个指针分别指向这k个链表的头节点,每次从这k个节点中选取值最小的节点。然后将指向值最小的节点的指针向后移动一步,再比较k个指…...
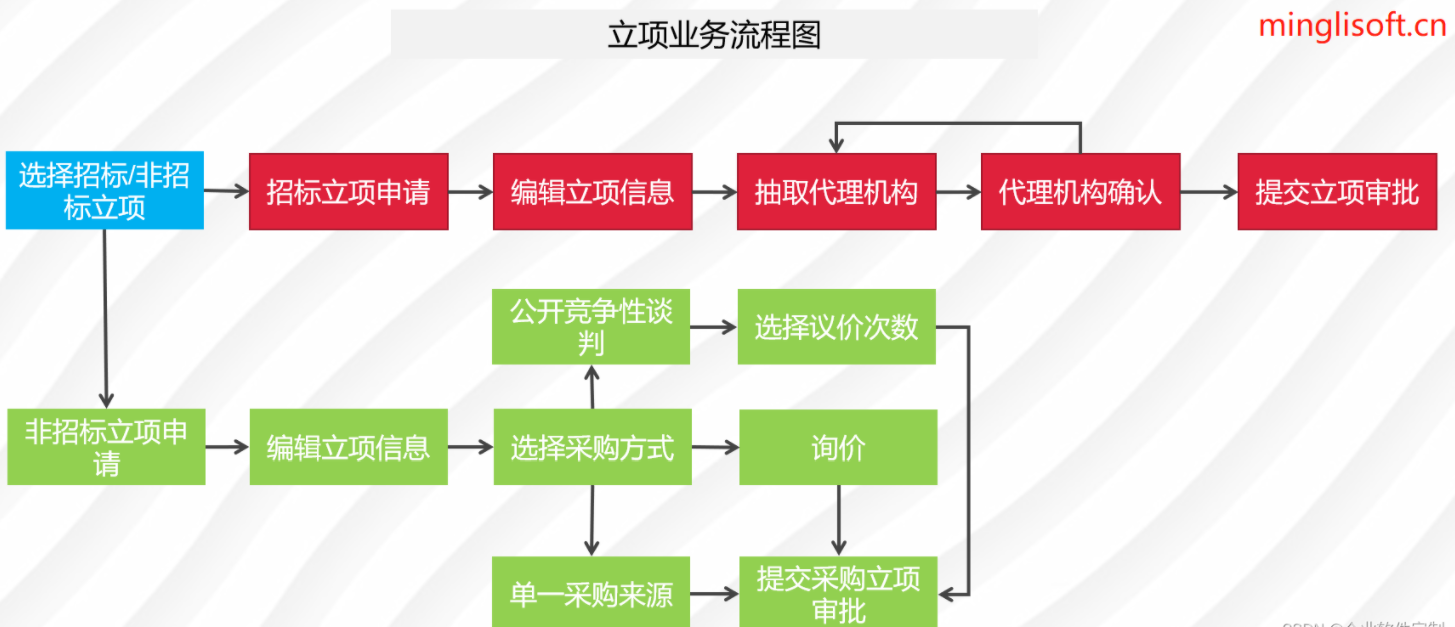
鸿鹄电子招投标系统:基于Spring Boot、Mybatis、Redis和Layui的企业电子招采平台源码与立项流程
在数字化时代,企业需要借助先进的数字化技术来提高工程管理效率和质量。招投标管理系统作为企业内部业务项目管理的重要应用平台,涵盖了门户管理、立项管理、采购项目管理、采购公告管理、考核管理、报表管理、评审管理、企业管理、采购管理和系统管理等…...
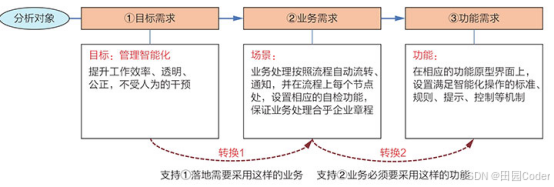
大话软工笔记—需求分析概述
需求分析,就是要对需求调研收集到的资料信息逐个地进行拆分、研究,从大量的不确定“需求”中确定出哪些需求最终要转换为确定的“功能需求”。 需求分析的作用非常重要,后续设计的依据主要来自于需求分析的成果,包括: 项目的目的…...

React hook之useRef
React useRef 详解 useRef 是 React 提供的一个 Hook,用于在函数组件中创建可变的引用对象。它在 React 开发中有多种重要用途,下面我将全面详细地介绍它的特性和用法。 基本概念 1. 创建 ref const refContainer useRef(initialValue);initialValu…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...
练习(含atoi的模拟实现,自定义类型等练习)
一、结构体大小的计算及位段 (结构体大小计算及位段 详解请看:自定义类型:结构体进阶-CSDN博客) 1.在32位系统环境,编译选项为4字节对齐,那么sizeof(A)和sizeof(B)是多少? #pragma pack(4)st…...

可靠性+灵活性:电力载波技术在楼宇自控中的核心价值
可靠性灵活性:电力载波技术在楼宇自控中的核心价值 在智能楼宇的自动化控制中,电力载波技术(PLC)凭借其独特的优势,正成为构建高效、稳定、灵活系统的核心解决方案。它利用现有电力线路传输数据,无需额外布…...

Go 语言接口详解
Go 语言接口详解 核心概念 接口定义 在 Go 语言中,接口是一种抽象类型,它定义了一组方法的集合: // 定义接口 type Shape interface {Area() float64Perimeter() float64 } 接口实现 Go 接口的实现是隐式的: // 矩形结构体…...
微信小程序 - 手机震动
一、界面 <button type"primary" bindtap"shortVibrate">短震动</button> <button type"primary" bindtap"longVibrate">长震动</button> 二、js逻辑代码 注:文档 https://developers.weixin.qq…...

Spring Boot+Neo4j知识图谱实战:3步搭建智能关系网络!
一、引言 在数据驱动的背景下,知识图谱凭借其高效的信息组织能力,正逐步成为各行业应用的关键技术。本文聚焦 Spring Boot与Neo4j图数据库的技术结合,探讨知识图谱开发的实现细节,帮助读者掌握该技术栈在实际项目中的落地方法。 …...
零基础设计模式——行为型模式 - 责任链模式
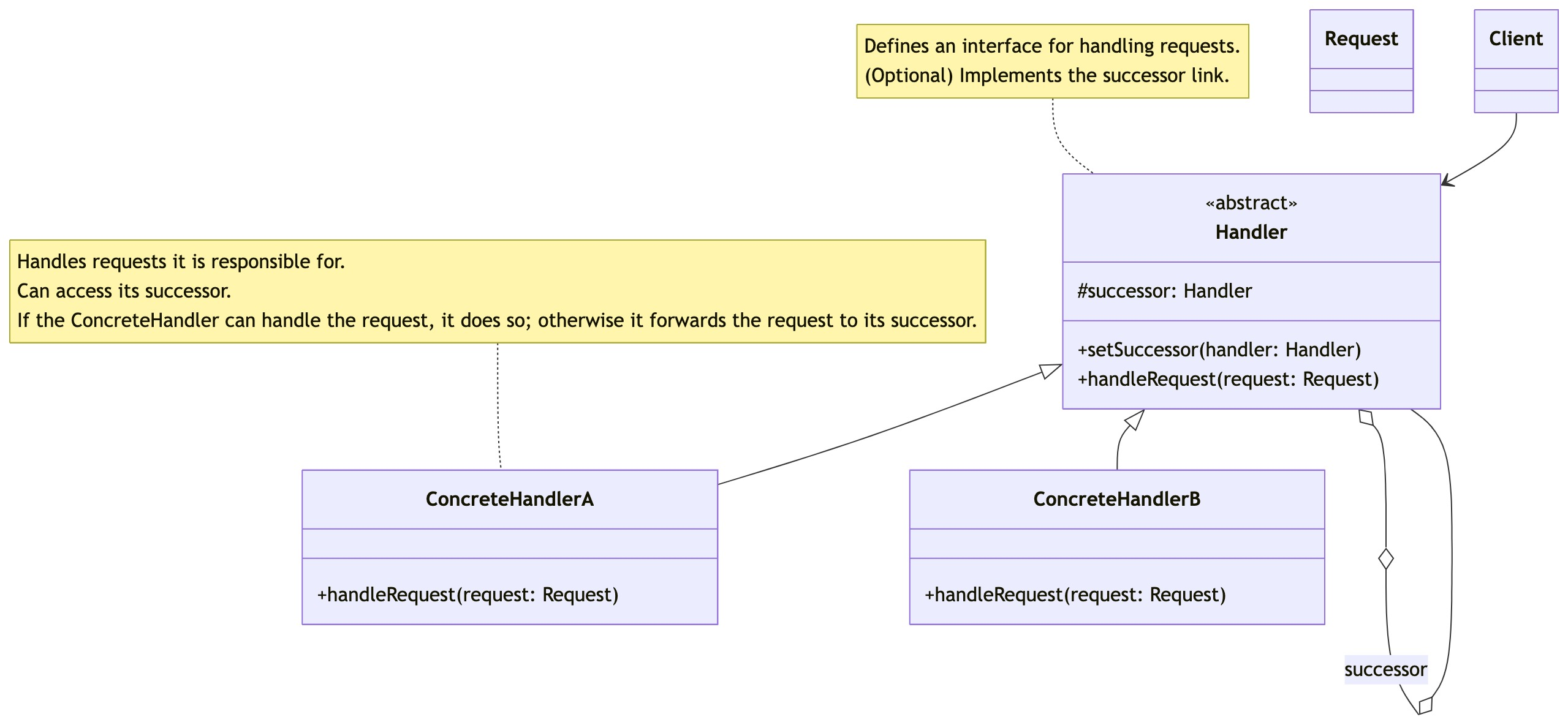
第四部分:行为型模式 - 责任链模式 (Chain of Responsibility Pattern) 欢迎来到行为型模式的学习!行为型模式关注对象之间的职责分配、算法封装和对象间的交互。我们将学习的第一个行为型模式是责任链模式。 核心思想:使多个对象都有机会处…...
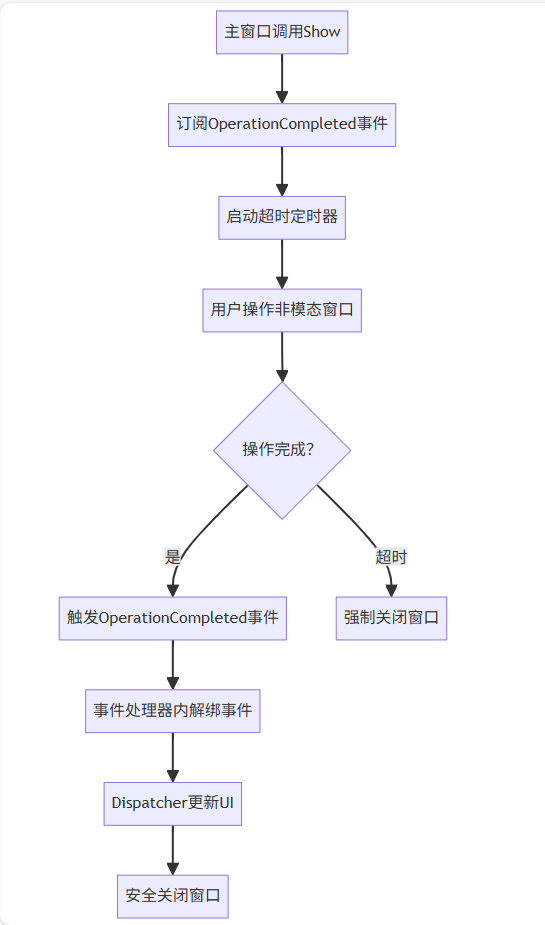
WPF八大法则:告别模态窗口卡顿
⚙️ 核心问题:阻塞式模态窗口的缺陷 原始代码中ShowDialog()会阻塞UI线程,导致后续逻辑无法执行: var result modalWindow.ShowDialog(); // 线程阻塞 ProcessResult(result); // 必须等待窗口关闭根本问题:…...