【c语言】飞机大战(1)
提前准备好游戏要的素材,可以到爱给网去找,飞机大战我们需要的是一个我方战机图片,一个背景图,三个敌方战机的图,我方战机的图片,敌方战机的图片,并且将图片和.cpp放在同一文件夹下.
这里创建.cpp的文件是因为要用到图形库,所以创建.cpp的文件,然后图片格式都是png
1.我方飞机和背景图片的加载和贴图
#include<stdio.h>
#include <graphics.h>//图形库头文件
#define HEIGHT 503
#define WIDTH 700
IMAGE img_bk, img_plane;//定义背景图片,玩家的类int main()
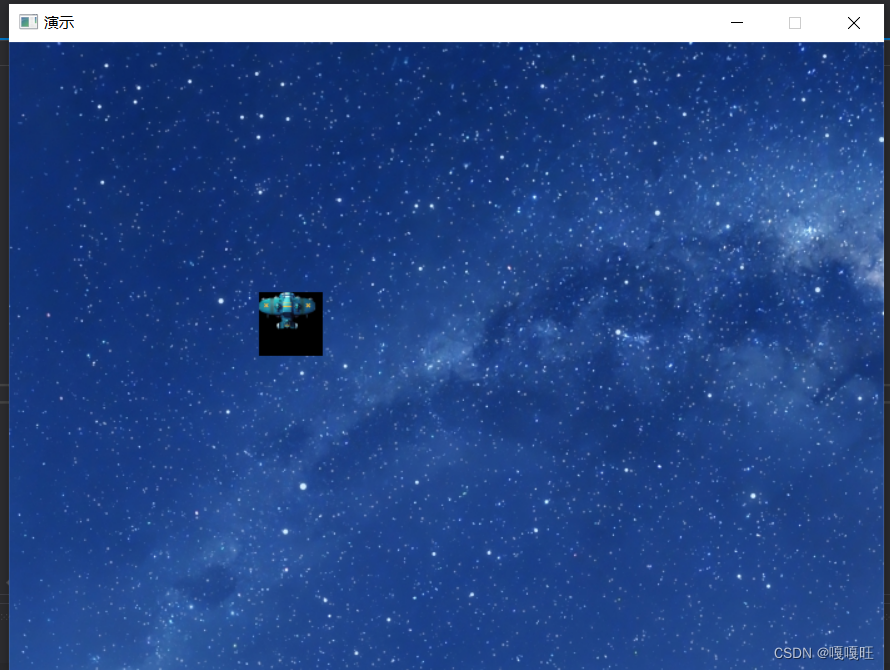
{initgraph(WIDTH, HEIGHT);//初始化游戏的背景loadimage(&img_bk, "./back.png");//加载游戏背景图loadimage(&img_plane, "./1.png");//加载游戏玩家图片putimage(0, 0, &img_bk);//贴游戏背景图putimage(200,200, &img_plane);//贴玩家战机的图片getchar();//防止窗口闪退}
背景图片是503*700,背景图片大小自己设置,为了让游戏体验感增强,如果铺满整个屏幕的话,会不好移动.
2.去掉飞机背后的黑色背景,使用一个算法函数
#include<stdio.h>
#include <graphics.h>
#define HEIGHT 503
#define WIDTH 700
IMAGE img_bk, img_plane;
void drawAlpha(IMAGE* picture, int picture_x, int picture_y) //x为载入图片的X坐标,y为Y坐标
{// 变量初始化DWORD* dst = GetImageBuffer(); // GetImageBuffer()函数,用于获取绘图设备的显存指针,EASYX自带DWORD* draw = GetImageBuffer();DWORD* src = GetImageBuffer(picture); //获取picture的显存指针int picture_width = picture->getwidth(); //获取picture的宽度,EASYX自带int picture_height = picture->getheight(); //获取picture的高度,EASYX自带int graphWidth = getwidth(); //获取绘图区的宽度,EASYX自带int graphHeight = getheight(); //获取绘图区的高度,EASYX自带int dstX = 0; //在显存里像素的角标// 实现透明贴图 公式: Cp=αp*FP+(1-αp)*BP , 贝叶斯定理来进行点颜色的概率计算for (int iy = 0; iy < picture_height; iy++){for (int ix = 0; ix < picture_width; ix++){int srcX = ix + iy * picture_width; //在显存里像素的角标int sa = ((src[srcX] & 0xff000000) >> 24); //0xAArrggbb;AA是透明度int sr = ((src[srcX] & 0xff0000) >> 16); //获取RGB里的Rint sg = ((src[srcX] & 0xff00) >> 8); //Gint sb = src[srcX] & 0xff; //Bif (ix >= 0 && ix <= graphWidth && iy >= 0 && iy <= graphHeight && dstX <= graphWidth * graphHeight){if ((ix + picture_x) >= 0 && (ix + picture_x) <= graphWidth) //防止出边界后循环显示{dstX = (ix + picture_x) + (iy + picture_y) * graphWidth; //在显存里像素的角标int dr = ((dst[dstX] & 0xff0000) >> 16);int dg = ((dst[dstX] & 0xff00) >> 8);int db = dst[dstX] & 0xff;draw[dstX] = ((sr * sa / 255 + dr * (255 - sa) / 255) << 16) //公式: Cp=αp*FP+(1-αp)*BP ; αp=sa/255 , FP=sr , BP=dr| ((sg * sa / 255 + dg * (255 - sa) / 255) << 8) //αp=sa/255 , FP=sg , BP=dg| (sb * sa / 255 + db * (255 - sa) / 255); //αp=sa/255 , FP=sb , BP=db}}}}
}int main()
{initgraph(WIDTH, HEIGHT);loadimage(&img_bk, "./back.png");loadimage(&img_plane, "./1.png");putimage(0, 0, &img_bk);//贴背景前两个为图片左上角要贴在窗口的坐标drawAlpha(&img_plane, 200, 200);//贴飞机图片getchar();}
这个函数我看不懂,是在网上搜的,我来解释一下三个参数,第一个是图片的地址,第二个参数,第三个参数的坐标是图片左上角从窗口的哪个位置贴,背景肯定是从窗口的左上角贴.
注意:使用这个函数在飞机移动屏幕过程中,会出现异常,不知道怎么解决,希望有大佬可以帮帮我,drawAlpha区别putimage可以把背景变透明

3.静态显示所有素材图片
#include<stdio.h>
#include <graphics.h>
#define HEIGHT 503
#define WIDTH 700
IMAGE img_bk, img_plane, img_a, img_b, img_c,img_abullet,img_bbullet,img_cbullet,img_planebullet;
struct aircraft
{int x, y;};
aircraft plane, a, b, c;
void datainit()
{plane = { 150,150 };a = { 0,0 };b = { 300,0 };c = { 450,0 };}
void drawAlpha(IMAGE* picture, int picture_x, int picture_y) //x为载入图片的X坐标,y为Y坐标
{// 变量初始化DWORD* dst = GetImageBuffer(); // GetImageBuffer()函数,用于获取绘图设备的显存指针,EASYX自带DWORD* draw = GetImageBuffer();DWORD* src = GetImageBuffer(picture); //获取picture的显存指针int picture_width = picture->getwidth(); //获取picture的宽度,EASYX自带int picture_height = picture->getheight(); //获取picture的高度,EASYX自带int graphWidth = getwidth(); //获取绘图区的宽度,EASYX自带int graphHeight = getheight(); //获取绘图区的高度,EASYX自带int dstX = 0; //在显存里像素的角标// 实现透明贴图 公式: Cp=αp*FP+(1-αp)*BP , 贝叶斯定理来进行点颜色的概率计算for (int iy = 0; iy < picture_height; iy++){for (int ix = 0; ix < picture_width; ix++){int srcX = ix + iy * picture_width; //在显存里像素的角标int sa = ((src[srcX] & 0xff000000) >> 24); //0xAArrggbb;AA是透明度int sr = ((src[srcX] & 0xff0000) >> 16); //获取RGB里的Rint sg = ((src[srcX] & 0xff00) >> 8); //Gint sb = src[srcX] & 0xff; //Bif (ix >= 0 && ix <= graphWidth && iy >= 0 && iy <= graphHeight && dstX <= graphWidth * graphHeight){if ((ix + picture_x) >= 0 && (ix + picture_x) <= graphWidth) //防止出边界后循环显示{dstX = (ix + picture_x) + (iy + picture_y) * graphWidth; //在显存里像素的角标int dr = ((dst[dstX] & 0xff0000) >> 16);int dg = ((dst[dstX] & 0xff00) >> 8);int db = dst[dstX] & 0xff;draw[dstX] = ((sr * sa / 255 + dr * (255 - sa) / 255) << 16) //公式: Cp=αp*FP+(1-αp)*BP ; αp=sa/255 , FP=sr , BP=dr| ((sg * sa / 255 + dg * (255 - sa) / 255) << 8) //αp=sa/255 , FP=sg , BP=dg| (sb * sa / 255 + db * (255 - sa) / 255); //αp=sa/255 , FP=sb , BP=db}}}}
}
void load()
{loadimage(&img_bk, "./back.png");loadimage(&img_plane, "./1.png");loadimage(&img_a, "./2.png");loadimage(&img_b, "./3.png");loadimage(&img_c, "./4.png");loadimage(&img_abullet, "./5.png");loadimage(&img_bbullet, "./6.png");loadimage(&img_cbullet, "./7.png");loadimage(&img_planebullet, "./8.png");}
void draw()
{putimage(0, 0, &img_bk);drawAlpha(&img_plane,plane.x,plane.y);drawAlpha(&img_a, a.x, a.y);drawAlpha(&img_b, b.x, b.y);drawAlpha(&img_c, c.x, c.y);drawAlpha(&img_abullet,400,0 );//后两个参数是图片左上角在窗口要贴的位置drawAlpha(&img_bbullet,400 ,50 );drawAlpha(&img_cbullet, 400, 100);drawAlpha(&img_planebullet, 400, 150);}int main()
{initgraph(WIDTH, HEIGHT);datainit();load();draw();getchar();}
定义3个敌方战机,a,b,c,3个敌机的子弹abullet,bbullet,cbullet,我方战机的子弹planebullet
IMAGE img_a, img_b, img_c,img_abullet,img_bbullet,img_cbullet,img_planebullet;
定义一个结构体记录每个图片左上角要贴在窗口的坐标.四个结构体表示我方战机,3个敌方战机在窗口上的坐标,图中的初始化只是为了让图片不重叠而已。
将加载图片的函数统一放在load函数里面,将贴图片的函数放在draw中.

4.我方飞机的移动
void player_move(int speed) //处理飞机移动
{if (GetAsyncKeyState(VK_UP) || GetAsyncKeyState('W')){if (plane.y > 0)plane.y -= speed;}if (GetAsyncKeyState(VK_DOWN) || GetAsyncKeyState('S')){if (plane.y + 126< HEIGHT)plane.y += speed;}if (GetAsyncKeyState(VK_LEFT) || GetAsyncKeyState('A')){if (plane.x > 0)plane.x -= speed;}if (GetAsyncKeyState(VK_RIGHT) || GetAsyncKeyState('D')){if (plane.x + 51 < WIDTH)plane.x += speed;}
}
这个移动函数在之前游戏里用了好多次,这里就不强调了.函数中的speed参数是我方战机的速度,每按一次会移动几个像素.这里的重点放在飞机边界的判断上,记得加双缓冲,要不然,屏幕会闪

边界的判断以及飞机的移动
if (GetAsyncKeyState(VK_DOWN) || GetAsyncKeyState('S')){if (plane.y + 126< HEIGHT)plane.y += speed;}
这里加126是为了不让程序出现异常,如果正常的话应该加51,因为我方战机图片大小是51*51;如果是51的话会出现如下视频的错误,不知道为什么,请看vcr
5.敌方战机的移动
首先我们要修改一下飞机结构体的变量
struct aircraft
{int x, y;int width;//敌机图片的宽度int height;//敌机图片的高度int speed;//敌机的速度int bornflag;//敌机在窗口里面置0,在外面置1};
然后修改一下初始话敌机的属性.
void datainit()
{plane = { 150,150 };//a = { 0,0 };/*b = { 300,0 };*//*c = { 450,0 };*/a.speed = 1;//a敌机的速度a.bornflag = 1;//a敌机是否存在b.bornflag = 1;c.bornflag = 1;a.width = 100;//a敌机的宽度a.height = 100;//a敌机的高度b.speed = 1;b.width = 80;b.height = 100;c.height = 70;c.width = 70;c.speed = 3;}
敌机a的移动
敌机a的移动
如视频所示,对应的代码实现是
void ufoamove()
{static int dir1 = 1;if (a.bornflag == 1){a.bornflag = 0;a.x = rand() % (WIDTH - a.width);a.y = -50;}if (a.y > 200){dir1 = 0;}else if (a.y < -150){dir1 = 1;a.bornflag = 1;}if (1 == dir1){a.y += a.speed;}else{a.y -= a.speed;}}
定义一个静态变量dir,dir为1的话,表示敌机前进,dir为0,敌机后退。因为是static,所以只有第一次初始化时候是1,别的时候不执行第一句.当敌机a没在窗口里面,说明a.bornflag == 1,就将a.bornflag 置为0,敌机a要出现了,随机数生成敌机a要出现的左右方向哪个地方,y=-50;是为了初始化的时候隐藏飞机.当敌机a前进200个像素时,dir置0,让敌机a后退.当敌机向上退出屏幕50个像素时,重新dir=1;敌机向前.此时会出现在另一个位置。在主函数中加入产生随机种子函数
srand(time(NULL));
包含头文件
#include<time.h>
#include<stdlib.h>
敌机出屏幕,drawAlpha这个函数会出错,所以我们把draw中的drawAlpha都改成putimage,这样黑框框又出现了,(电子叹气)
void draw()
{putimage(0, 0, &img_bk);putimage(plane.x, plane.y ,&img_plane );putimage(a.x, a.y ,&img_a);putimage(b.x, b.y ,&img_b );putimage(c.x, c.y, &img_c );putimage(400, 0 ,&img_abullet );putimage(400, 50 ,&img_bbullet);putimage(400, 100 ,&img_cbullet );putimage(400, 150, &img_planebullet );}
敌机b的移动
请看vcr
敌机b的移动
对应代码
void ufobmove()
{static int step = b.speed;if (b.bornflag == 1){b.bornflag = 0;b.x = rand() % (WIDTH - b.width);b.y = -b.height;}if (b.x <= 0 || b.x + b.width >= WIDTH){step = -step;}b.x += step;b.y++;if (b.y >= HEIGHT){b.bornflag = 1;}}
由视频可知敌机b的移动规律是在左右移动的同时还向前移动,step如果为正,向右移动,step如果为负,表示向左移动,如果b战机没有出现在窗口内(b.bornflag == 1),将b.bornflag 置0,表示要出现,随机数生成b战机的坐标.y=-b.height;初始化先隐藏起来.如果b战机到了左右边界,step=-step;
就向相反的方向移动了,左右移动实质是在给b.x±step;然后y++,b战机在左右移动的过程中,一直往前走.当b战机出了下边界,b.bornflag = 1;表示b战机出了窗口.
敌机c的移动
请看vcr
敌机c的移动
对应的代码为
void ufocmove()
{static float disx = 0, disy = 0;static float tmpx = 0, tmpy = 0;static float vx = 0, vy = 0;float step = 1000 / c.speed;if (1 == c.bornflag){c.bornflag = 0;tmpx = rand() % (WIDTH - c.width);tmpy = -c.height;disx = plane.x - tmpx;disy = plane.y - tmpy;vx = disx / step;vy = disy / step;}tmpx += vx;tmpy += vy;c.x = (int)(tmpx + 0.5);c.y = (int)(tmpy + 0.5);if (c.x < -c.width){c.bornflag = 1;}else if (c.x > WIDTH){c.bornflag = 1;}if (c.y > HEIGHT){c.bornflag = 1;}}这个c战机是要撞向我方飞机,tmpx,tmpy存放的是c战机的临时的位置,刚生成时,当然是他出生点的坐标,disx是c战机刚出来x方向上与当时我方战机x方向上的距离,同理另一个.step是,假如c.speed的速度为5的话,step==200,就是说将x方向上的距离分为200份,vx就是每一份的距离是多少像素,这里强制类型转化,c.x,c.y是整数,因为vx,vy不清楚,所以+0.5,四舍五入一下就是整数了.如果在左,右,下方向超出了,就c.bornflag = 1;离开窗口了.
6.整体代码展示
#include<stdio.h>
#include <graphics.h>
//#include<conio.h>//_getch();
#define HEIGHT 503
#define WIDTH 700
IMAGE img_bk, img_plane, img_a, img_b, img_c, img_abullet, img_bbullet, img_cbullet, img_planebullet;
struct aircraft
{int x, y;int width;int height;int speed;int bornflag;};
aircraft plane, a, b, c;
void datainit()
{plane = { 150,150 };//a = { 0,0 };/*b = { 300,0 };*//*c = { 450,0 };*/a.speed = 1;a.bornflag = 1;b.bornflag = 1;c.bornflag = 1;a.width = 100;a.height = 100;b.speed = 1;b.width = 80;b.height = 100;c.height = 70;c.width = 70;c.speed = 3;}
void drawAlpha(IMAGE* picture, int picture_x, int picture_y) //x为载入图片的X坐标,y为Y坐标
{// 变量初始化DWORD* dst = GetImageBuffer(); // GetImageBuffer()函数,用于获取绘图设备的显存指针,EASYX自带DWORD* draw = GetImageBuffer();DWORD* src = GetImageBuffer(picture); //获取picture的显存指针int picture_width = picture->getwidth(); //获取picture的宽度,EASYX自带int picture_height = picture->getheight(); //获取picture的高度,EASYX自带int graphWidth = getwidth(); //获取绘图区的宽度,EASYX自带int graphHeight = getheight(); //获取绘图区的高度,EASYX自带int dstX = 0; //在显存里像素的角标// 实现透明贴图 公式: Cp=αp*FP+(1-αp)*BP , 贝叶斯定理来进行点颜色的概率计算for (int iy = 0; iy < picture_height; iy++){for (int ix = 0; ix < picture_width; ix++){int srcX = ix + iy * picture_width; //在显存里像素的角标int sa = ((src[srcX] & 0xff000000) >> 24); //0xAArrggbb;AA是透明度int sr = ((src[srcX] & 0xff0000) >> 16); //获取RGB里的Rint sg = ((src[srcX] & 0xff00) >> 8); //Gint sb = src[srcX] & 0xff; //Bif (ix >= 0 && ix <= graphWidth && iy >= 0 && iy <= graphHeight && dstX <= graphWidth * graphHeight){if ((ix + picture_x) >= 0 && (ix + picture_x) <= graphWidth) //防止出边界后循环显示{dstX = (ix + picture_x) + (iy + picture_y) * graphWidth; //在显存里像素的角标int dr = ((dst[dstX] & 0xff0000) >> 16);int dg = ((dst[dstX] & 0xff00) >> 8);int db = dst[dstX] & 0xff;draw[dstX] = ((sr * sa / 255 + dr * (255 - sa) / 255) << 16) //公式: Cp=αp*FP+(1-αp)*BP ; αp=sa/255 , FP=sr , BP=dr| ((sg * sa / 255 + dg * (255 - sa) / 255) << 8) //αp=sa/255 , FP=sg , BP=dg| (sb * sa / 255 + db * (255 - sa) / 255); //αp=sa/255 , FP=sb , BP=db}}}}
}
void load()
{loadimage(&img_bk, "./back.png");loadimage(&img_plane, "./1.png");loadimage(&img_a, "./2.png");loadimage(&img_b, "./3.png");loadimage(&img_c, "./4.png");loadimage(&img_abullet, "./5.png");loadimage(&img_bbullet, "./6.png");loadimage(&img_cbullet, "./7.png");loadimage(&img_planebullet, "./8.png");}
void draw()
{putimage(0, 0, &img_bk);putimage(plane.x, plane.y ,&img_plane );putimage(a.x, a.y ,&img_a);putimage(b.x, b.y ,&img_b );putimage(c.x, c.y, &img_c );putimage(400, 0 ,&img_abullet );putimage(400, 50 ,&img_bbullet);putimage(400, 100 ,&img_cbullet );putimage(400, 150, &img_planebullet );}
void player_move(int speed) //处理飞机移动
{if (GetAsyncKeyState(VK_UP) || GetAsyncKeyState('W')){if (plane.y > 0)plane.y -= speed;}if (GetAsyncKeyState(VK_DOWN) || GetAsyncKeyState('S')){if (plane.y + 51< HEIGHT)plane.y += speed;}if (GetAsyncKeyState(VK_LEFT) || GetAsyncKeyState('A')){if (plane.x > 0)plane.x -= speed;}if (GetAsyncKeyState(VK_RIGHT) || GetAsyncKeyState('D')){if (plane.x + 51 < WIDTH)plane.x += speed;}
}
void ufoamove()
{static int dir1 = 1;if (a.bornflag == 1){a.bornflag = 0;a.x = rand() % (WIDTH - a.width);a.y = -50;}if (a.y > 200){dir1 = 0;}else if (a.y < -150){dir1 = 1;a.bornflag = 1;}if (1 == dir1){a.y += a.speed;}else{a.y -= a.speed;}}
void ufobmove()
{static int step = b.speed;if (b.bornflag == 1){b.bornflag = 0;b.x = rand() % (WIDTH - b.width);b.y = -b.height;}if (b.x <= 0 || b.x + b.width >= WIDTH){step = -step;}b.x += step;b.y++;if (b.y >= HEIGHT){b.bornflag = 1;}}
void ufocmove()
{static float disx = 0, disy = 0;static float tmpx = 0, tmpy = 0;static float vx = 0, vy = 0;float step = 1000 / c.speed;if (1 == c.bornflag){c.bornflag = 0;tmpx = rand() % (WIDTH - c.width);tmpy = -c.height;disx = plane.x - tmpx;disy = plane.y - tmpy;vx = disx / step;vy = disy / step;}tmpx += vx;tmpy += vy;c.x = (int)(tmpx + 0.5);c.y = (int)(tmpy + 0.5);if (c.x < -c.width){c.bornflag = 1;}else if (c.x > WIDTH){c.bornflag = 1;}if (c.y > HEIGHT){c.bornflag = 1;}}int main()
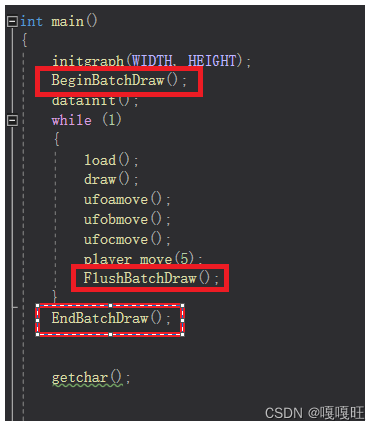
{initgraph(WIDTH, HEIGHT);BeginBatchDraw();datainit();while (1){load();draw();ufoamove();ufobmove();ufocmove();player_move(5);FlushBatchDraw();}EndBatchDraw();getchar();}
7.剩下实现放在下一篇啦
相关文章:
【c语言】飞机大战(1)
提前准备好游戏要的素材,可以到爱给网去找,飞机大战我们需要的是一个我方战机图片,一个背景图,三个敌方战机的图,我方战机的图片,敌方战机的图片,并且将图片和.cpp放在同一文件夹下. 这里创建.…...
关于 K8s 的一些基础概念整理
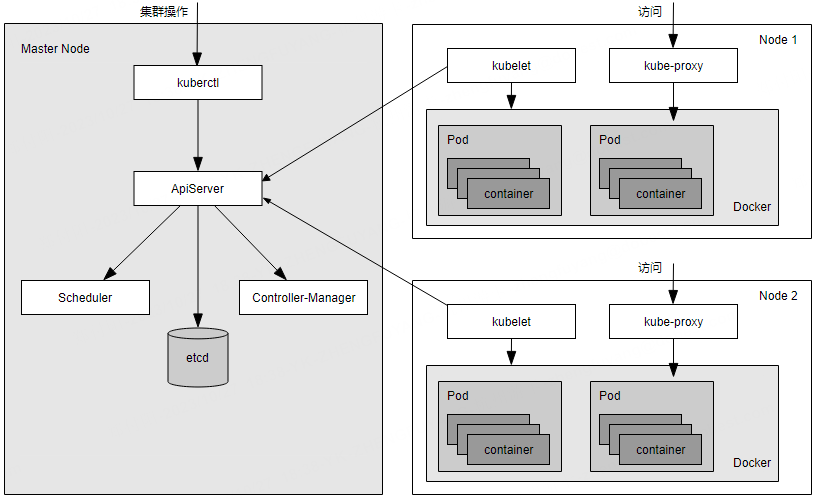
〇、前言 Kubernetes,将中间八个字母用数字 8 替换掉简称 k8s,是一个开源的容器集群管理系统,由谷歌开发并维护。它为跨主机的容器化应用提供资源调度、服务发现、高可用管理和弹性伸缩等功能。 下面简单列一下 k8s 的几个特性: 自…...
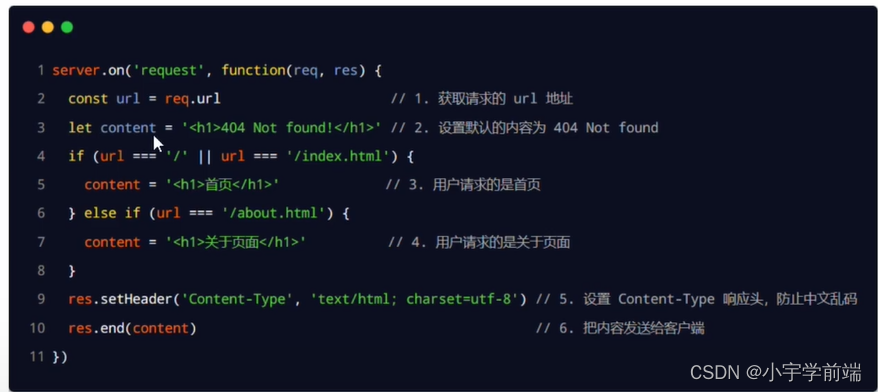
Node.js-fs、path、http模块
1.初识Node.js 1.1 什么是Node.js 1.2 Node.js中的JavaScript运行环境 1.3 Node.js可以做什么 Node.js 作为一个JavaScript 的运行环境,仅仅提供了基础的功能和 AP1。然而,基于 ode.s 提供的这些基础能,很多强大的工具和框架如雨后春笋&…...

CentOS 安装WebLogic
1.JDK 安装 cd /home/ mkdir java cd java/ tar -zxvf jdk-8u321-linux-x64.tar.gzvim /etc/profile添加以下内容到 /etc/profile JAVA_HOME/home/java/jdk1.8.0_321 CLASSPATH.:$JAVA_HOME/lib.tools.jar PATH$JAVA_HOME/bin:$PATH export JAVA_HOME CLASSPATH PATH刷新配置…...

Linux命令的操作练习
1.创建ss别名,查看长格式详细信息 alias ssls -l 2.创建ss别名,复制boot文件夹下的内容到data文件夹下 alias sscp -r /boot /data 3.删除别名ss unalias ss 4. 复制test文件夹下的passwd文件到qq文件夹下,并改名为ww cp test/pas…...
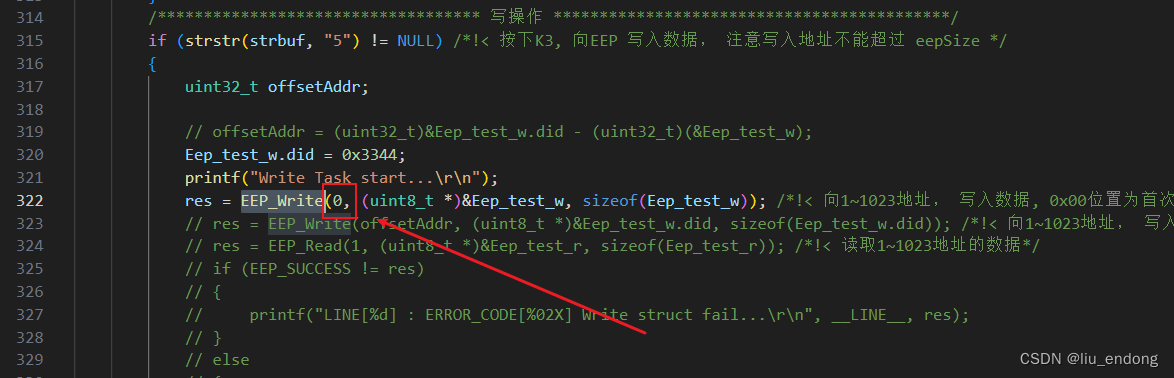
杰发科技AC7840——EEPROM初探
0.序 7840和7801的模拟EEPROM使用不太一样 1.现象 按照官方Demo,在这样的配置下,我们看到存储是这样的(连续三个数字1 2 3)。 使用串口工具的多帧发送功能 看不出多少规律 修改代码后 发现如下规律: 前四个字节是…...
)
WPF 基础入门(简介)
简介 WPF(Windows Presentation Foundation)是微软推出的基于Windows 的用户界面框架,属于.NET Framework 3.0的一部分。它提供了统一的编程模型、语言和框架,真正做到了分离界面设计人员与开发人员的工作;同时它提供了…...

【Unity动画系统】Animator有限状态机参数详解
👨💻个人主页:元宇宙-秩沅 👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 👨💻 本文由 秩沅 原创 👨💻 收录于专栏:Uni…...

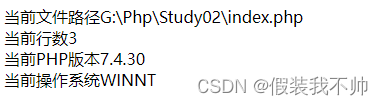
php获取访客IP、UA、操作系统、浏览器等信息
最近有个需求就是获取下本地的ip地址、网上搜索了相关的教程,总结一下分享给大家、有需要的小伙伴可以参考一下 一、简单的获取 User Agent 信息代码: echo $_SERVER[HTTP_USER_AGENT]; 二、获取访客操作系统信息: /** * 获取客户端操作系统信息,包括win10 * pa…...

基于huffman编解码的图像压缩算法matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 4.1 Huffman编码算法步骤 4.2 Huffman编码的数学原理 4.3 基于Huffman编解码的图像压缩 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 matlab2022a 3.部分核心程序 ..…...

python+django网上购物商城系统o9m4k
语言:Python 框架:django/flask可以定制 软件版本:python3.7.7 数据库:mysql 数据库工具:Navicat 开发工具pycharm/vscode都可以 前端框架:vue.js 系统使用过程主要涉及到管理员和用户两种角色,主要包含个…...

面试题-性能优化
前端项目优化: 一般考虑方面: (挑几点记住) 我们学的: 懒加载: 路由、图片懒加载 骨架屏的使用 压缩文件:可以使用压缩工具(如GZIP)对页面文件进行压缩,减小文件大小,提高页面加载速度。 减少HTTP请求&a…...

自身文档管理规范
之前在 这里 叙述了 用 sphinx 生成静态网站, 并利用 静态网络托管服务 readthedocs 现在我们有了新的需求,想知道这些东西到底是什么。 过程 过程A : markdown/rst -> html mkdocs sphinx相关: pandoc(不能生成整个网站的h…...
php学习05-常量
常量可以理解为值不变的量。常量值被定义后,在脚本的其他任何地方都不能改变。一个常量由英文字母、下划线和数字组成,但数字不能作为首字母出现。 在PHP中使用define()函数来定义常量,该函数的语法格式如下: define(string cons…...

MFC:如何将JPEG等图片显示到对话框客户区
步骤: 0、打开VS2022创建一个基于对话框的MFC应用,项目名称命名为PicShow,创建完成后将对话框客户区中的"确定"按钮等内容删除(具体步骤略)。 1、建立菜单栏:文件->打开、退出。具体步骤&#x…...

MIUI解BL锁+刷系统教程
解除BL锁 打开设置找到My device->Detailed info and specs->连点5下MIUI version(进入开发者模式)重新打开设置找到Additional settings->Developer opentions->Mi lock status->Add account and device下载官方解锁工具包(miflash_unlock…...
)
数据结构和算法笔记3:双指针法(快慢指针)
双指针法(快慢指针法)在数组、字符串和链表的操作中是非常常见的,这里结合力扣上的题进行可一下梳理,主要的思路是我们要明确快指针指的是什么,慢指针指的是什么。 1. 移除元素类问题 27. 移除元素 要我们移除目标元…...
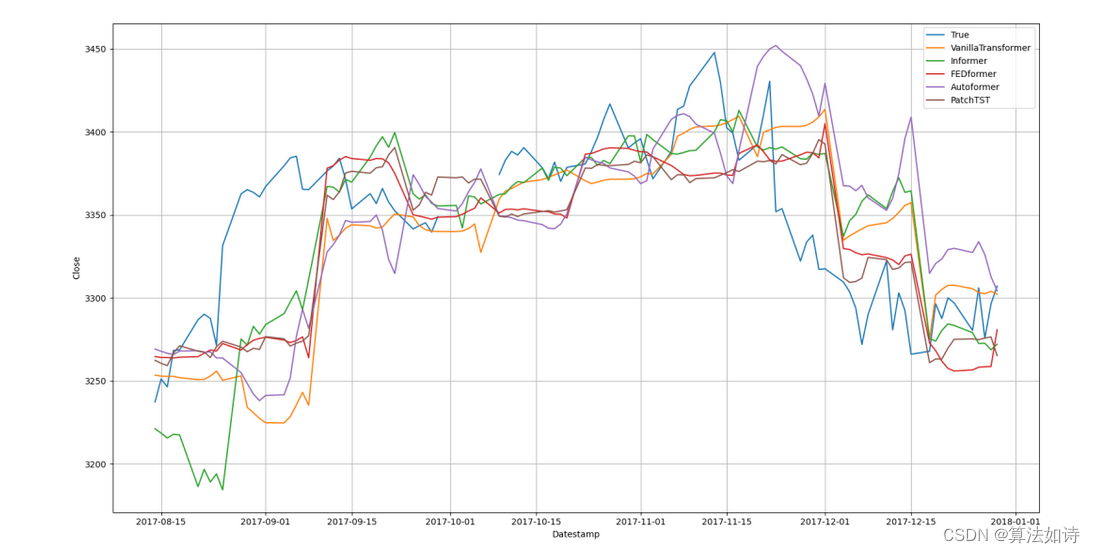
股票价格预测 | Python实现Autoformer, FEDformer和PatchTST等模型用于股价预测
文章目录 效果一览文章概述环境描述源码设计效果一览 文章概述 Autoformer、FEDformer和PatchTST是一些用于时间序列预测,包括股价预测的模型。它们都是在Transformer模型的基础上进行了改进和扩展,以更好地适应时间序列数据的特点。 Autoformer:Autoformer是一种自适应Tran…...
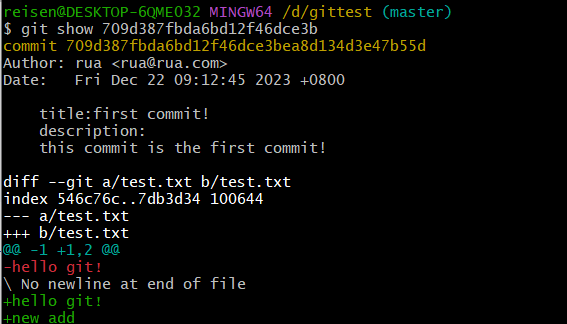
Git基础学习_p1
文章目录 一、前言二、Git手册学习2.1 Git介绍&前置知识2.2 Git教程2.2.1 导入新项目2.2.2 做更改2.2.3 Git追踪内容而非文件2.2.4 查看项目历史2.2.5 管理分支🔺2.2.6 用Git来协同工作2.2.7 查看历史 三、结尾 一、前言 Git相信大部分从事软件工作的人都听说过…...

4.Redis事务
4.Redis事务 文章目录 4.Redis事务是什么?能干嘛?Redis 事务 VS 数据库事务命令总结 是什么? 可以一次执行多个命令,本质是一组命令的集合。一个事务中的所有命令都会序列化,按顺序地串行化执行而不会被其它命令插入&…...
:にする)
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(33):にする
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(33):にする 1、前言(1)情况说明(2)工程师的信仰2、知识点(1) にする1,接续:名词+にする2,接续:疑问词+にする3,(A)は(B)にする。(2)復習:(1)复习句子(2)ために & ように(3)そう(4)にする3、…...

vscode(仍待补充)
写于2025 6.9 主包将加入vscode这个更权威的圈子 vscode的基本使用 侧边栏 vscode还能连接ssh? debug时使用的launch文件 1.task.json {"tasks": [{"type": "cppbuild","label": "C/C: gcc.exe 生成活动文件"…...

python如何将word的doc另存为docx
将 DOCX 文件另存为 DOCX 格式(Python 实现) 在 Python 中,你可以使用 python-docx 库来操作 Word 文档。不过需要注意的是,.doc 是旧的 Word 格式,而 .docx 是新的基于 XML 的格式。python-docx 只能处理 .docx 格式…...
微服务商城-商品微服务
数据表 CREATE TABLE product (id bigint(20) UNSIGNED NOT NULL AUTO_INCREMENT COMMENT 商品id,cateid smallint(6) UNSIGNED NOT NULL DEFAULT 0 COMMENT 类别Id,name varchar(100) NOT NULL DEFAULT COMMENT 商品名称,subtitle varchar(200) NOT NULL DEFAULT COMMENT 商…...
)
Java入门学习详细版(一)
大家好,Java 学习是一个系统学习的过程,核心原则就是“理论 实践 坚持”,并且需循序渐进,不可过于着急,本篇文章推出的这份详细入门学习资料将带大家从零基础开始,逐步掌握 Java 的核心概念和编程技能。 …...

Linux --进程控制
本文从以下五个方面来初步认识进程控制: 目录 进程创建 进程终止 进程等待 进程替换 模拟实现一个微型shell 进程创建 在Linux系统中我们可以在一个进程使用系统调用fork()来创建子进程,创建出来的进程就是子进程,原来的进程为父进程。…...

关键领域软件测试的突围之路:如何破解安全与效率的平衡难题
在数字化浪潮席卷全球的今天,软件系统已成为国家关键领域的核心战斗力。不同于普通商业软件,这些承载着国家安全使命的软件系统面临着前所未有的质量挑战——如何在确保绝对安全的前提下,实现高效测试与快速迭代?这一命题正考验着…...
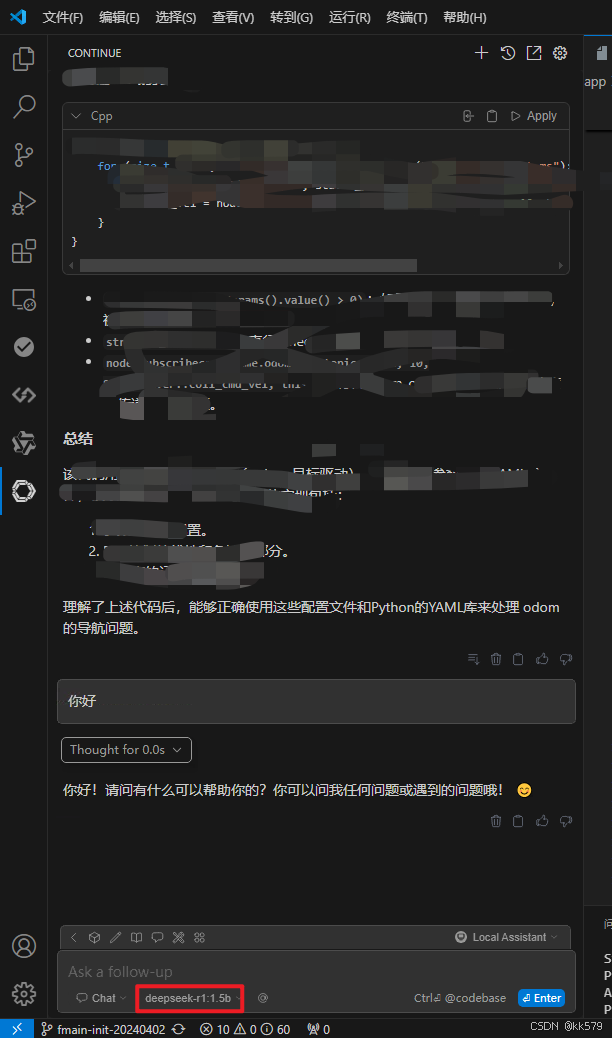
保姆级教程:在无网络无显卡的Windows电脑的vscode本地部署deepseek
文章目录 1 前言2 部署流程2.1 准备工作2.2 Ollama2.2.1 使用有网络的电脑下载Ollama2.2.2 安装Ollama(有网络的电脑)2.2.3 安装Ollama(无网络的电脑)2.2.4 安装验证2.2.5 修改大模型安装位置2.2.6 下载Deepseek模型 2.3 将deepse…...
计算机基础知识解析:从应用到架构的全面拆解
目录 前言 1、 计算机的应用领域:无处不在的数字助手 2、 计算机的进化史:从算盘到量子计算 3、计算机的分类:不止 “台式机和笔记本” 4、计算机的组件:硬件与软件的协同 4.1 硬件:五大核心部件 4.2 软件&#…...
Android写一个捕获全局异常的工具类
项目开发和实际运行过程中难免会遇到异常发生,系统提供了一个可以捕获全局异常的工具Uncaughtexceptionhandler,它是Thread的子类(就是package java.lang;里线程的Thread)。本文将利用它将设备信息、报错信息以及错误的发生时间都…...