uboot学习及内核更换_incomplete
官方文档
在前面
文章目录
- uboot常见命令学习
- 环境变量
- 网络控制台
- uboot标准启动
- 其他
- 升级uboot或内核
- bin和uimg以及booti和bootm的区别
- 制作uImage
- 更换内核
- 更换uboot
- 后续计划
uboot常见命令学习
环境变量
Environment Variables环境变量
autostart 如果值为yes,则会在以下命令后自动执行bootm加载镜像
bootelf - Boot from an ELF image in memory
bootp - boot image via network using BOOTP/TFTP protocol
dhcp - boot image via network using DHCP/TFTP protocol
diskboot - boot from ide device
nboot - boot from NAND device
nfs - boot image via network using NFS protocol
rarpboot - boot image via network using RARP/TFTP protocol
scsiboot - boot from SCSI device
tftpboot - boot image via network using TFTP protocol
usbboot - boot from USB device
bootcmd 用户不进bootshell自动执行的命令
bootargs 传递给操作系统或镜像的参数
bootfile tftp时的镜像名
ipaddr tftpboot用到的ip地址
serverip tftpboot用到的tftp服务器地址
网络控制台
Network console
uboot启用network console
需要设置CONFIG_NETCONSOLE=y以启用特性。
使用方法:
使用ncip设置目的地址和端口号(默认6666),比如你的服务器ip是192.168.1.1:
=> setenv nc 'setenv stdout nc;setenv stdin nc'
=> setenv ncip 192.168.1.1
=> saveenv
=> run nc
在主机侧,使用脚本来访问控制台:
tools/netconsole <ip> [port]
主机侧也可以使用主机名
参考《【调试】netconsole的使用》
linux启用network console
如果想开启这个功能,需要内核编译支持,我这里的选项默认是:
CONFIG_NETCONSOLE=m
CONFIG_NETCONSOLE_DYNAMIC=n
如果将netconsole编译进内核自动加载,还需要在内核启动参数中传递进去。格式如下:
netconsole=[src-port]@[src-ip]/[<dev>],[tgt-port]@<tgt-ip>/[tgt-macaddr]
例子:
netconsole=4444@10.0.0.1/eth1,9353@10.0.0.2/12:34:56:78:9a:bc
netconsole=@/,@192.168.3.1/
然后查看linux控制台输出:
nc -u -l -p 6666
uboot标准启动
U-Boot Standard Boot
bootdev 可保存或访问发行版的设备
bootmeth 扫描bootdev发现bootflow的方法
bootflow 描述启动方法(发行版提供)
其他
bootmenu 生成一个选单
升级uboot或内核
bin和uimg以及booti和bootm的区别
参考文章《编译生成uImage过程——mips平台》
uboot.bin是U-boot bootloader的二进制文件。
uImage是一个小内核映像,带有Uboot的修改头,使U-boot能够加载此内核映像uboot.bin是U-boot bootloader的二进制文件。
uImage是一个小内核映像,带有Uboot的修改头,使U-boot能够加载此内核映像
booti和bootm命令的区别
bootz是启动zImage,而bootm是启动uImage,其中booti专门用来启动ARM64的kernel image。
制作uImage
使用uboot的tools目录下的mkimage命令可以创建用于uboot的镜像,即uImage。
先加下这个命令:
$ sudo update-alternatives --install /usr/bin/mkimage mkimage /home/wsl/project/raspberry_pi/u-boot/tools/mkimage 10
常见参数
Usage: ./mkimage [-T type] -l image-l ==> list image header information-T ==> parse image file as 'type'-q ==> quiet./mkimage [-x] -A arch -O os -T type -C comp -a addr -e ep -n name -d data_file[:data_file...] image-A ==> set architecture to 'arch'-O ==> set operating system to 'os'-T ==> set image type to 'type'-C ==> set compression type 'comp'-a ==> set load address to 'addr' (hex)-e ==> set entry point to 'ep' (hex)-n ==> set image name to 'name'-R ==> set second image name to 'name'-d ==> use image data from 'datafile'-x ==> set XIP (execute in place)-s ==> create an image with no data-v ==> verbose./mkimage [-D dtc_options] [-f fit-image.its|-f auto|-f auto-conf|-F] [-b <dtb> [-b <dtb>]] [-E] [-B size] [-i <ramdisk.cpio.gz>] fit-image<dtb> file is used with -f auto, it may occur multiple times.-D => set all options for device tree compiler-f => input filename for FIT source-i => input filename for ramdisk file-E => place data outside of the FIT structure-B => align size in hex for FIT structure and header-b => append the device tree binary to the FIT-t => update the timestamp in the FIT
Signing / verified boot options: [-k keydir] [-K dtb] [ -c <comment>] [-p addr] [-r] [-N engine]-k => set directory containing private keys-K => write public keys to this .dtb file-g => set key name hint-G => use this signing key (in lieu of -k)-c => add comment in signature node-F => re-sign existing FIT image-p => place external data at a static position-r => mark keys used as 'required' in dtb-N => openssl engine to use for signing-o => algorithm to use for signing./mkimage -V ==> print version information and exit
Use '-T list' to see a list of available image types
Long options are available; read the man page for details
参考《uboot-tool工具命令mkimage详解uboot-tool工具命令mkimage详解》,一个典型的生成命令如下:
mkimage -A arm64 -O linux -T kernel -a 0x00080000 -e 0x00080040 -C none -n kernel-myconfig -d arch/arm64/boot/Image kernel.uImage
比较关键的是-e参数,-e 指定映象运行的入口点地址,这个地址就是-a参数指定的值加上0x40(因为前面有个mkimage添加的0x40个字节的头),关于参数,这里还有一份更全的文档可以参考。
使用上述命令后,内核无法启动,报错:
Working FDT set to 0Loading Kernel Image
FDT and ATAGS support not compiled inresetting ...
后面再看
更换内核
暂时搞了这么几个env,可以用来运行
booti_kernel=booti ${kernel_addr_r} - ${fdt_addr}
dhcp_get_kernel=dhcp ${kernel_addr_r} kernel-myconfig.img
dhcpboot=run dhcp_get_kernel;run booti_kernel
fat_get_kernel=fatload mmc 0:1 ${kernel_addr_r} kernel-myconfig.img
fatboot=run fat_get_kernel;run booti_kernel
更换uboot
暂时用了个笨办法,先用dhcp把u-boot.bin取过来,然后用fatwrite写到boot分区,然后reset重新启动
后续计划
看是否能较方便的一次性更换内核,设备树,模块等。
一个自定义的uboot环境变量
HWID=TS-SG5036FX:02:04:01:0E:101:00:00:00:00:00:00:00:00:00:00:00:00:00:00:00:00
ID=000000000000000000
appauto=1
baudrate=115200
boardmodel=RTL9311_6x8214QF_1x8218E_4XGE_24GF_8GE_4XF
boot_flag=0
bootargs=mem=512M console=ttyS0,115200 rd_start=0x82000000 rd_size=0xd00000 root=/dev/ram0 rw init=/linuxrc
bootcmd=boota
bootdelay=1
bootflag=0
da=tftp 0x81000000 boot.bin.img; flwrite
dh_keyboard=0
dr=tftp 0x81000000 krootfs.bin.img; flwrite
drb=tftp 0x81000000 krootfs_backup.bin.img; flwrite
ethact=rtl9310#0
ethaddr=20:23:04:19:13:38
fileaddr=81000000
filesize=D74F38
gatewayip=172.14.48.1
ipaddr=172.14.49.120
ledModeInitSkip=0
netmask=255.255.255.0
serverip=10.33.7.176
stderr=serial
stdin=serial
stdout=serial
tk=tftp 0x81000000 krootfs.bin.img; bootm 0x81000000
up=tftp 0x81000000 update.img; flwrite
相关文章:

uboot学习及内核更换_incomplete
官方文档 在前面 文章目录 uboot常见命令学习环境变量网络控制台uboot标准启动其他 升级uboot或内核bin和uimg以及booti和bootm的区别制作uImage更换内核更换uboot后续计划 uboot常见命令学习 环境变量 Environment Variables环境变量 autostart 如果值为yes,则会…...
KVM 自动化脚本的使用及热/冷迁移
一、介绍 目录结构介绍 [rootkvm-server kvm]# tree -L 2 . ├── control # 控制脚本目录 │ ├── KVMInstall.sh # kvm服务安装脚本 │ ├── VMHost.sh # kvm虚拟机克隆脚本 │ └── VMTemplate.sh # kvm模板机安装脚本 ├── mount # 此目录保持为空&…...
Unity中Shader裁剪空间推导(在Shader中使用)
文章目录 前言一、在Shader中使用转化矩阵1、在顶点着色器中定义转化矩阵2、用 UNITY_NEAR_CLIP_VALUE 区分平台矩阵3、定义一个枚举用于区分当前是处于什么相机 二、我们在DirectX平台下,看看效果1、正交相机下2、透视相机下3、最终代码 前言 在上一篇文章中&…...
ES的使用(Elasticsearch)
ES的使用(Elasticsearch) es是什么? es是非关系型数据库,是分布式文档数据库,本质上是一个JSON 文本 为什么要用es? 搜索速度快,近乎是实时的存储、检索数据 怎么使用es? 1.下载es的包(环境要…...
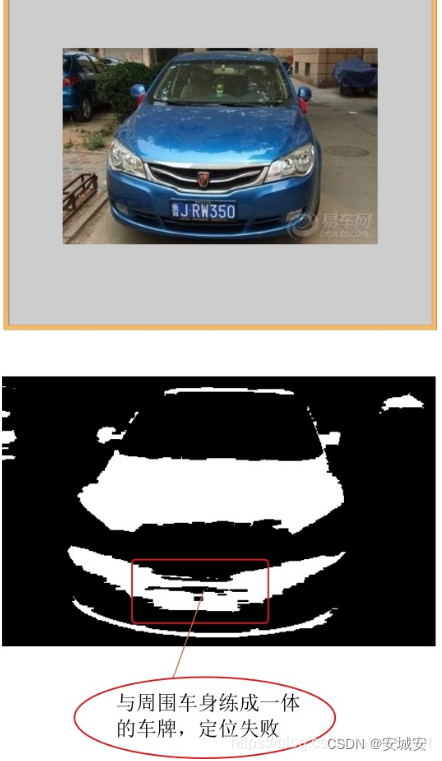
车牌识别技术,如何用python识别车牌号
目录 一.前言 二.运行环境 三.代码 四.识别效果 五.参考 一.前言 车牌识别技术(License Plate Recognition, LPR)在交通计算机视觉(Computer Vision, CV)领域具有非常重要的研究意义。以下是该技术的一些扩展说明࿱…...
>)
爬虫工作量由小到大的思维转变---<第二十五章 Scrapy开始很快,越来越慢(追溯篇)>
爬虫工作量由小到大的思维转变---<第二十二章 Scrapy开始很快,越来越慢(诊断篇)>-CSDN博客 爬虫工作量由小到大的思维转变---<第二十三章 Scrapy开始很快,越来越慢(医病篇)>-CSDN博客 前言: 之前提到过,很多scrapy写出来之后,不…...
Servlet入门
目录 1.Servlet介绍 1.1什么是Servlet 1.2Servlet的使用方法 1.3Servlet接口的继承结构 2.Servlet快速入门 2.1创建javaweb项目 2.1.1创建maven工程 2.1.2添加webapp目录 2.2添加依赖 2.3创建servlet实例 2.4配置servlet 2.5设置打包方式 2.6部署web项目 3.servl…...

【C#与Redis】--高级主题--Redis 哨兵
一、简介 1.1 哨兵的概述 哨兵(Sentinel)是 Redis 分布式系统中用于监控和管理多个 Redis 服务器的组件。它的主要目标是确保 Redis 系统的高可用性,通过实时监测主节点和从节点的状态,及时发现并自动处理故障,保证系…...

linux安装python
文章目录 前言一、下载安装包二、安装1.安装依赖2.解压3.安装4.软链接5.验证 总结 前言 本篇文章介绍linux环境下安装python。 一、下载安装包 下载地址:官方网站 我们以最新的标准版为例 二、安装 1.安装依赖 yum -y install openssl-devel ncurses-devel li…...

【如何破坏单例模式(详解)】
✅如何破坏单例模式 💡典型解析✅拓展知识仓✅反射破坏单例✅反序列化破坏单例✅ObjectlnputStream ✅总结✅如何避免单例被破坏✅ 避免反射破坏单例✅ 避免反序列化破坏单例 💡典型解析 单例模式主要是通过把一个类的构造方法私有化,来避免重…...

什么是 SPI,它有什么用?
文章目录 什么是 SPI,它有什么用? 什么是 SPI,它有什么用? SPI 全称是 Service Provider Interface ,它是 JDK 内置的一种动态扩展点的实现。 简单来说,就是我们可以定义一个标准的接口,然后第三…...

FolkMQ 新的消息中间件,v1.0.25
简介 采用 “多路复用” “内存运行” “快照持久化” “Broker 集群模式”(可选)基于 Socket.D 网络应用协议 开发。全新设计,自主架构! 角色功能生产端发布消息(Qos0、Qos1)、发布定时消息ÿ…...
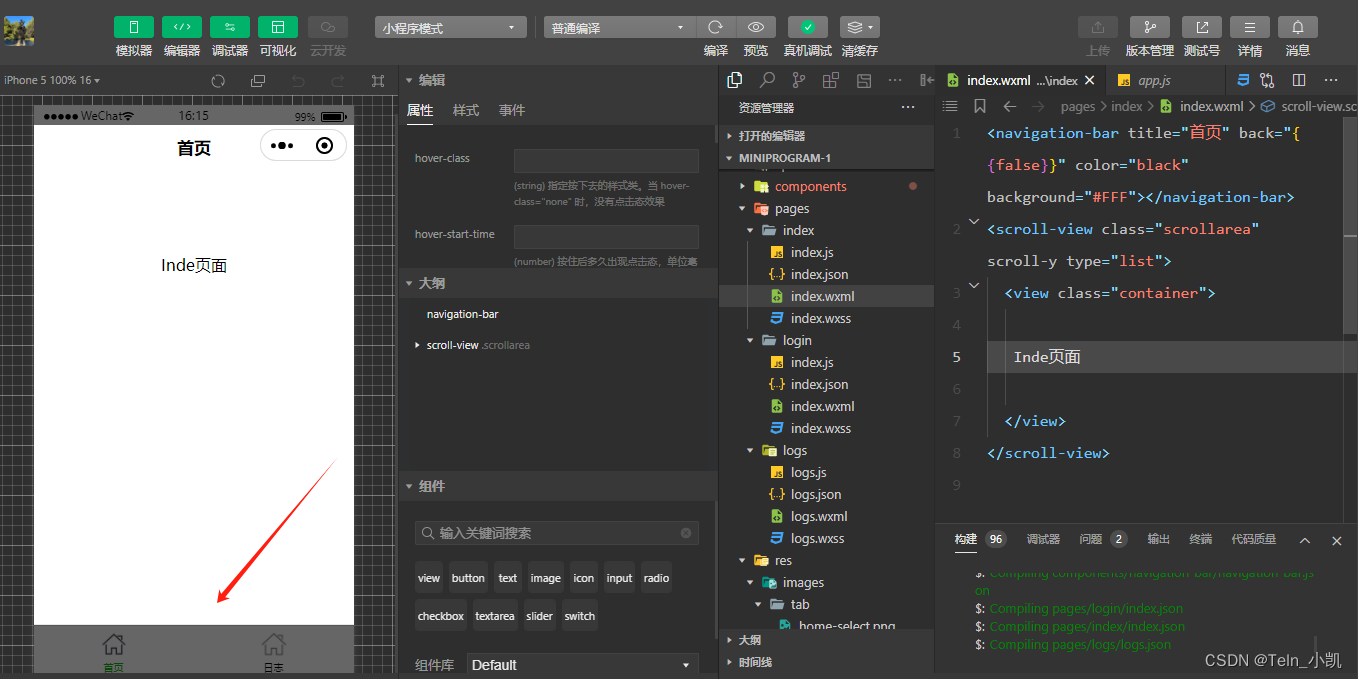
小程序入门-登录+首页
正常新建一个登录页面 创建首页和TatBar,实现登录后底部出现两个按钮 代码 "pages": ["pages/login/index","pages/index/index","pages/logs/logs" ],"tabBar": {"list": [{"pagePath"…...

React快速入门之组件
目录 组件JSX在标签使用{}嵌入JS表达式使用组件组件嵌套以🌲树的方式管理组件间的关系组件纯粹原则 组件 文件:Profile.js export default function Profile({isPacked true,head,stlyeTmp,src,size 80}) {if (isPacked) {head head &q…...

.NET Conf 2023 回顾 – 庆祝社区、创新和 .NET 8 的发布
作者: Jon Galloway - Principal Program Manager, .NET Community Team Mehul Harry - Product Marketing Manager, .NET, Azure Marketing 排版:Alan Wang .NET Conf 2023 是有史以来规模最大的 .NET 会议,来自全球各地的演讲者进行了 100 …...
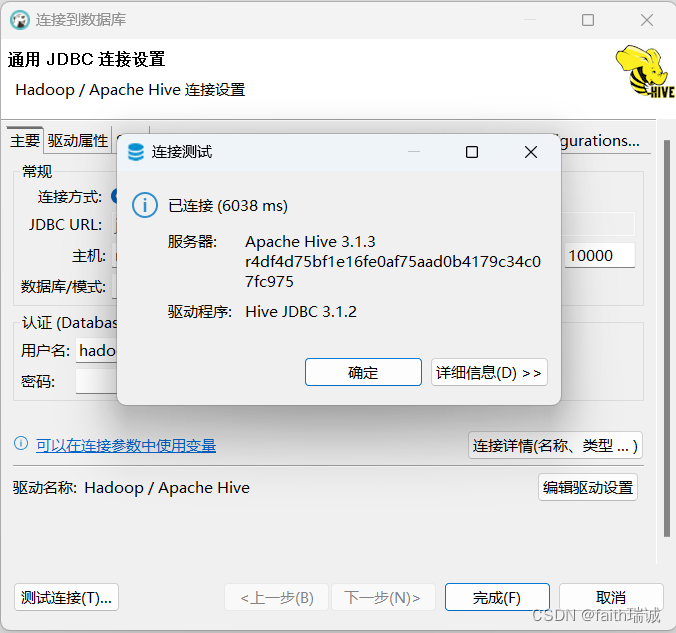
Hadoop入门学习笔记——六、连接到Hive
视频课程地址:https://www.bilibili.com/video/BV1WY4y197g7 课程资料链接:https://pan.baidu.com/s/15KpnWeKpvExpKmOC8xjmtQ?pwd5ay8 Hadoop入门学习笔记(汇总) 目录 六、连接到Hive6.1. 使用Hive的Shell客户端6.2. 使用Beel…...
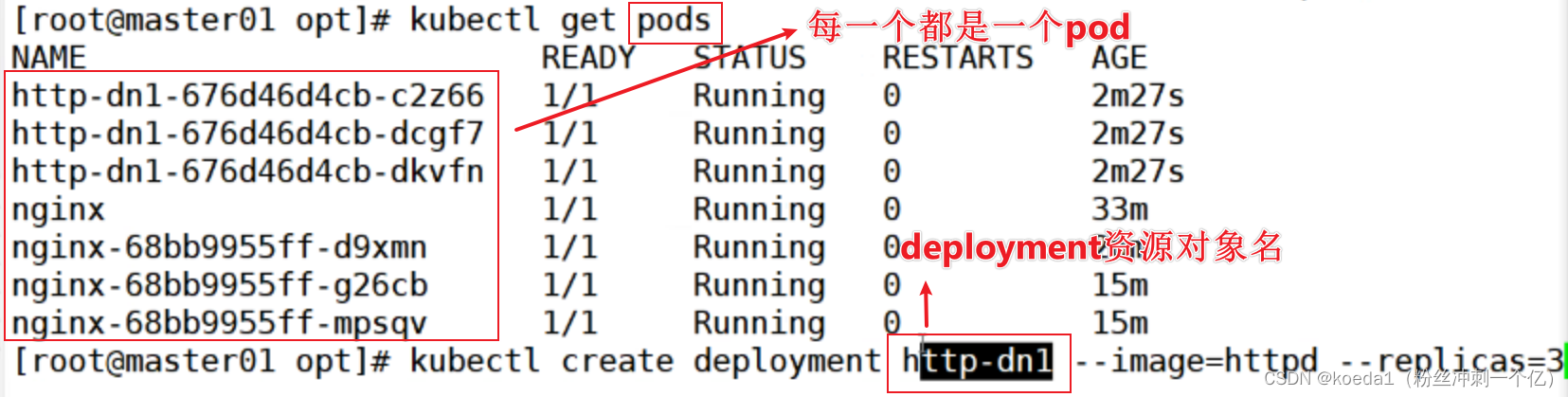
【K8S 基本概念】Kurbernetes的架构和核心概念
目录 一、Kurbernetes 1.1 简介 1.2、K8S的特性: 1.3、docker和K8S: 1.4、K8S的作用: 1.5、K8S的特性: 二、K8S集群架构与组件: 三、K8S的核心组件: 一、master组件: 1、kube-apiserve…...

WPS复选框里打对号,显示小太阳或粗黑圆圈的问题解决方法
问题描述 WPS是时下最流行的字处理软件之一,是目前唯一可以和微软office办公套件相抗衡的国产软件。然而,在使用WPS的过程中也会出现一些莫名其妙的错误,如利用WPS打开docx文件时,如果文件包含复选框,经常会出…...

对“企业数据资源相关会计处理暂行规定“的个人理解
附:2023年数据资源入表白皮书下载: 关注WX公众号: commindtech77, 获得数据资产相关白皮书下载地址 1. 回复关键字:数据资源入表白皮书 下载 《2023数据资源入表白皮书》 2. 回复关键字:光大银行 下载 光…...

JavaScript:函数隐含对象arguments/剩余参数. . .c/解构赋值
除了this,在函数内部还存在着一个隐含的参数arguments arguments 是一个类数组对象(伪数组) 调用函数时传递的所有实参,都被存储在arguments中 arguments[0] 表示的是第一个实参 arguments[1] 表示的是第二个实参 以此类推..…...
)
Java 语言特性(面试系列2)
一、SQL 基础 1. 复杂查询 (1)连接查询(JOIN) 内连接(INNER JOIN):返回两表匹配的记录。 SELECT e.name, d.dept_name FROM employees e INNER JOIN departments d ON e.dept_id d.dept_id; 左…...

将对透视变换后的图像使用Otsu进行阈值化,来分离黑色和白色像素。这句话中的Otsu是什么意思?
Otsu 是一种自动阈值化方法,用于将图像分割为前景和背景。它通过最小化图像的类内方差或等价地最大化类间方差来选择最佳阈值。这种方法特别适用于图像的二值化处理,能够自动确定一个阈值,将图像中的像素分为黑色和白色两类。 Otsu 方法的原…...

oracle与MySQL数据库之间数据同步的技术要点
Oracle与MySQL数据库之间的数据同步是一个涉及多个技术要点的复杂任务。由于Oracle和MySQL的架构差异,它们的数据同步要求既要保持数据的准确性和一致性,又要处理好性能问题。以下是一些主要的技术要点: 数据结构差异 数据类型差异ÿ…...
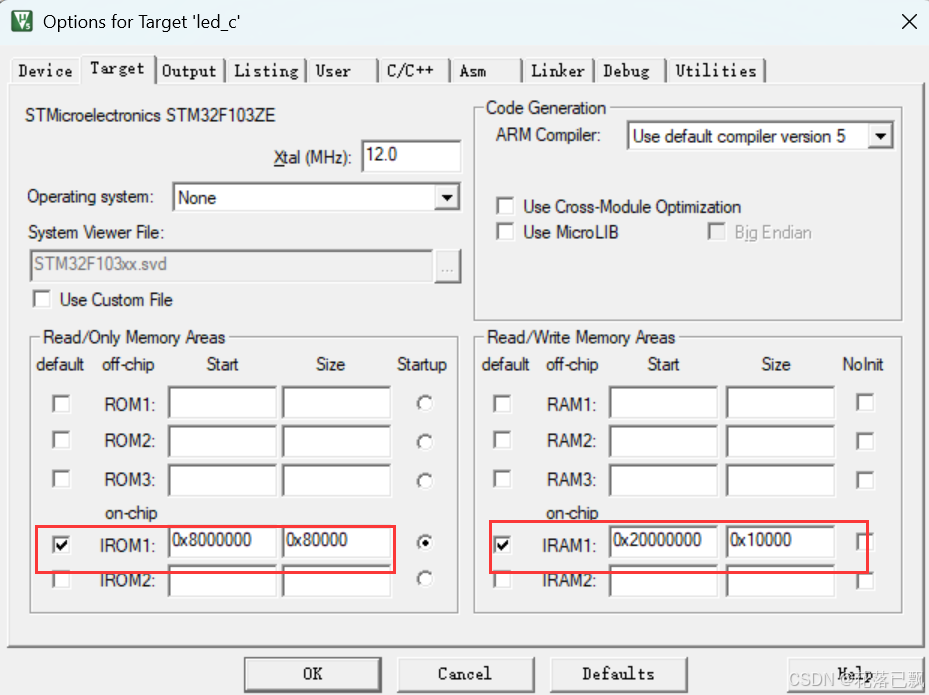
Keil 中设置 STM32 Flash 和 RAM 地址详解
文章目录 Keil 中设置 STM32 Flash 和 RAM 地址详解一、Flash 和 RAM 配置界面(Target 选项卡)1. IROM1(用于配置 Flash)2. IRAM1(用于配置 RAM)二、链接器设置界面(Linker 选项卡)1. 勾选“Use Memory Layout from Target Dialog”2. 查看链接器参数(如果没有勾选上面…...

【Go】3、Go语言进阶与依赖管理
前言 本系列文章参考自稀土掘金上的 【字节内部课】公开课,做自我学习总结整理。 Go语言并发编程 Go语言原生支持并发编程,它的核心机制是 Goroutine 协程、Channel 通道,并基于CSP(Communicating Sequential Processes࿰…...

C++八股 —— 单例模式
文章目录 1. 基本概念2. 设计要点3. 实现方式4. 详解懒汉模式 1. 基本概念 线程安全(Thread Safety) 线程安全是指在多线程环境下,某个函数、类或代码片段能够被多个线程同时调用时,仍能保证数据的一致性和逻辑的正确性…...
Android 之 kotlin 语言学习笔记三(Kotlin-Java 互操作)
参考官方文档:https://developer.android.google.cn/kotlin/interop?hlzh-cn 一、Java(供 Kotlin 使用) 1、不得使用硬关键字 不要使用 Kotlin 的任何硬关键字作为方法的名称 或字段。允许使用 Kotlin 的软关键字、修饰符关键字和特殊标识…...

Rapidio门铃消息FIFO溢出机制
关于RapidIO门铃消息FIFO的溢出机制及其与中断抖动的关系,以下是深入解析: 门铃FIFO溢出的本质 在RapidIO系统中,门铃消息FIFO是硬件控制器内部的缓冲区,用于临时存储接收到的门铃消息(Doorbell Message)。…...

DeepSeek 技术赋能无人农场协同作业:用 AI 重构农田管理 “神经网”
目录 一、引言二、DeepSeek 技术大揭秘2.1 核心架构解析2.2 关键技术剖析 三、智能农业无人农场协同作业现状3.1 发展现状概述3.2 协同作业模式介绍 四、DeepSeek 的 “农场奇妙游”4.1 数据处理与分析4.2 作物生长监测与预测4.3 病虫害防治4.4 农机协同作业调度 五、实际案例大…...
springboot整合VUE之在线教育管理系统简介
可以学习到的技能 学会常用技术栈的使用 独立开发项目 学会前端的开发流程 学会后端的开发流程 学会数据库的设计 学会前后端接口调用方式 学会多模块之间的关联 学会数据的处理 适用人群 在校学生,小白用户,想学习知识的 有点基础,想要通过项…...