分享相关知识
直接使用海龟图进行创作移动动态的游戏
这段代码是一个简单的turtle模块实现的小游戏,主要功能包括:
-
窗口和无人机初始化:
- 创建了一个turtle窗口,设置了窗口的背景颜色和标题。
- 创建了一个表示无人机的turtle,形状为正方形,蓝色,大小为(2 * 5)。
- 创建了四个表示旋翼的turtle,形状为圆形,红色,大小根据半径计算。
-
障碍物的创建和初始化:
- 创建了三个初始位置随机的障碍物,其中两个形状为圆形,一个形状为三角形。
-
碰撞检测和处理:
- 使用
is_collision函数检测无人机和障碍物之间的碰撞。 handle_collision函数用于处理碰撞,根据障碍物的形状进行分数和死亡次数的更新,并根据分数动态改变无人机的宽度。- 障碍物的位置在碰撞后会重新设置。
- 使用
-
按键事件和无人机移动:
- 使用
wn.listen()启用键盘事件监听。 - 定义了四个移动函数
move_up、move_down、move_left、move_right,分别控制无人机的上下左右移动。 move_rotors函数用于移动旋翼。
- 使用
-
动态增加新的障碍物:
add_obstacle函数根据分数的不同,动态地增加新的三角形障碍物,并且仅在之前没有创建过相应障碍物的情况下执行。
-
计时和异常处理:
- 计时程序记录了游戏的运行时间。
- 在主循环中加入异常处理,避免窗口关闭时出现错误。
-
更新分数和死亡次数的显示:
update_score_display函数用于更新分数和死亡次数的显示,并在需要时增加新的障碍物。
-
游戏结束提示:
- 在死亡次数达到三次时,输出游戏结束提示。
这个小游戏通过键盘操作无人机,避开圆形障碍物,触碰三角形障碍物会导致死亡。分数在碰撞到圆形障碍物时增加,死亡次数在碰撞到三角形障碍物时增加。同时,游戏会动态地增加新的三角形障碍物。
import turtle
import random
import math
import time# 设置窗口
wn = turtle.Screen()
wn.bgcolor("white")
wn.title("无人机")# 创建飞行器
drone = turtle.Turtle()
drone.shape("square")
drone.color("blue")
drone.shapesize(stretch_wid=2, stretch_len=5)# 创建圆形的旋翼
rotor_radius = 20def draw_rotor(rotor, x, y):rotor.speed(0)rotor.shape("circle")rotor.color("red")rotor.shapesize(rotor_radius / 10)rotor.penup()rotor.goto(x, y)# 创建旋翼
rotor1 = turtle.Turtle()
draw_rotor(rotor1, -50, 50)rotor2 = turtle.Turtle()
draw_rotor(rotor2, 50, 50)rotor3 = turtle.Turtle()
draw_rotor(rotor3, -50, -50)rotor4 = turtle.Turtle()
draw_rotor(rotor4, 50, -50)# 创建障碍物(圆形和三角形)
obstacle_size = 20def draw_obstacle(obstacle, shape, x, y):obstacle.speed(0)obstacle.shape(shape)obstacle.color("black")obstacle.penup()obstacle.goto(x, y)# 随机初始位置
obstacle1_initial_pos = (random.randint(-200, 200), random.randint(-200, 200))
obstacle2_initial_pos = (random.randint(-200, 200), random.randint(-200, 200))
obstacle3_initial_pos = (random.randint(-200, 200), random.randint(-200, 200))# 创建障碍物
obstacle1 = turtle.Turtle()
obstacle_shape1 = "circle"
draw_obstacle(obstacle1, obstacle_shape1, *obstacle1_initial_pos)obstacle2 = turtle.Turtle()
obstacle_shape2 = "circle"
draw_obstacle(obstacle2, obstacle_shape2, *obstacle2_initial_pos)obstacle3 = turtle.Turtle()
obstacle_shape3 = "triangle"
draw_obstacle(obstacle3, obstacle_shape3, *obstacle3_initial_pos)obstacle4 = None
obstacle5 = None
obstacle6 = None# 记录分值和死亡次数
score = 0
death_count = 0# 分数和死亡次数显示
score_display = turtle.Turtle()
score_display.hideturtle()
score_display.penup()
score_display.goto(-200, 200)
score_display.write(f"分数: {score} 死亡次数: {death_count}", align="left", font=("Arial", 16, "normal"))# 移动无人机及旋翼
def move_up():y = drone.ycor()drone.sety(y + 10)check_collision()def move_down():y = drone.ycor()drone.sety(y - 10)check_collision()def move_left():x = drone.xcor()drone.setx(x - 10)check_collision()def move_right():x = drone.xcor()drone.setx(x + 10)check_collision()# 移动旋翼函数
def move_rotors():rotor1.setpos(drone.xcor() - 50, drone.ycor() + 50)rotor2.setpos(drone.xcor() + 50, drone.ycor() + 50)rotor3.setpos(drone.xcor() - 50, drone.ycor() - 50)rotor4.setpos(drone.xcor() + 50, drone.ycor() - 50)# 碰撞检测函数
def check_collision():global score, death_count# 检测与障碍物1的碰撞if is_collision(drone, obstacle1):handle_collision(obstacle1)# 检测与障碍物2的碰撞if is_collision(drone, obstacle2):handle_collision(obstacle2)# 检测与障碍物3的碰撞if is_collision(drone, obstacle3):handle_collision(obstacle3)#这个是中级难度的,会增加一个障碍物 if score>=10:if is_collision(drone, obstacle4):handle_collision(obstacle4)if score>=20:if is_collision(drone, obstacle5):handle_collision(obstacle5)if score>=30:if is_collision(drone, obstacle6):handle_collision(obstacle6)# 判断是否发生碰撞
def is_collision(t1, t2):x1, y1 = t1.xcor(), t1.ycor()x2, y2 = t2.xcor(), t2.ycor()distance = math.sqrt((x1 - x2)**2 + (y1 - y2)**2)return distance < (obstacle_size + 20)# 处理碰撞函数
def handle_collision(obstacle):global score, death_countif obstacle.shape() == "circle":score += 1print(f"碰撞到圆球! 得分: {score}")reset_obstacle(obstacle)elif obstacle.shape() == "triangle":death_count += 1print(f"已死亡!死亡次数: {death_count}")if death_count == 3:print("游戏结束,请重新开始")time.sleep(3)wn.bye() # 关闭窗口reset_obstacle(obstacle)# 根据分数动态改变无人机宽度drone_width_percent = 1 + score * 0.01drone.shapesize(stretch_wid=2 * drone_width_percent, stretch_len=5)update_score_display()# 重置障碍物位置
def reset_obstacle(obstacle):obstacle.setpos(random.randint(-200, 200), random.randint(-200, 200))
def game_over():# 游戏结束的操作print("Game Over")turtle.bye() # 关闭窗口
# 动态增加新的障碍物
def add_obstacle():global obstacle4, obstacle5, obstacle6if score >= 10 and obstacle4 is None:obstacle4 = turtle.Turtle()obstacle_shape4 = "triangle"draw_obstacle(obstacle4, obstacle_shape4, random.randint(-200, 200), random.randint(-200, 200))elif score >= 20 and obstacle5 is None:obstacle5 = turtle.Turtle()obstacle_shape5 = "triangle"draw_obstacle(obstacle5, obstacle_shape5, random.randint(-200, 200), random.randint(-200, 200))elif score >= 30 and obstacle6 is None:obstacle6 = turtle.Turtle()obstacle_shape6 = "triangle"draw_obstacle(obstacle6, obstacle_shape6, random.randint(-200, 200), random.randint(-200, 200))
def update_score_display():global scorescore_display.clear()score_display.write(f"分数: {score} 死亡次数: {death_count}", align="left", font=("Arial", 16, "normal"))add_obstacle() # 检查是否需要增加新的障碍物
# 绑定按键事件,就是你键盘w s a d按下就能移动
wn.listen()
wn.onkeypress(move_up, "w")
wn.onkeypress(move_down, "s")
wn.onkeypress(move_left, "a")
wn.onkeypress(move_right, "d")# 主循环
# 计时程序
starTime = time.time()
while True:try:move_rotors()wn.update()except:print("请重新启动游戏")break
endTime = time.time()
elapsedTime = endTime - starTime
print("你最终花费的时间是:", elapsedTime)相关文章:

分享相关知识
直接使用海龟图进行创作移动动态的游戏 这段代码是一个简单的turtle模块实现的小游戏,主要功能包括: 窗口和无人机初始化: 创建了一个turtle窗口,设置了窗口的背景颜色和标题。创建了一个表示无人机的turtle,形状为正…...
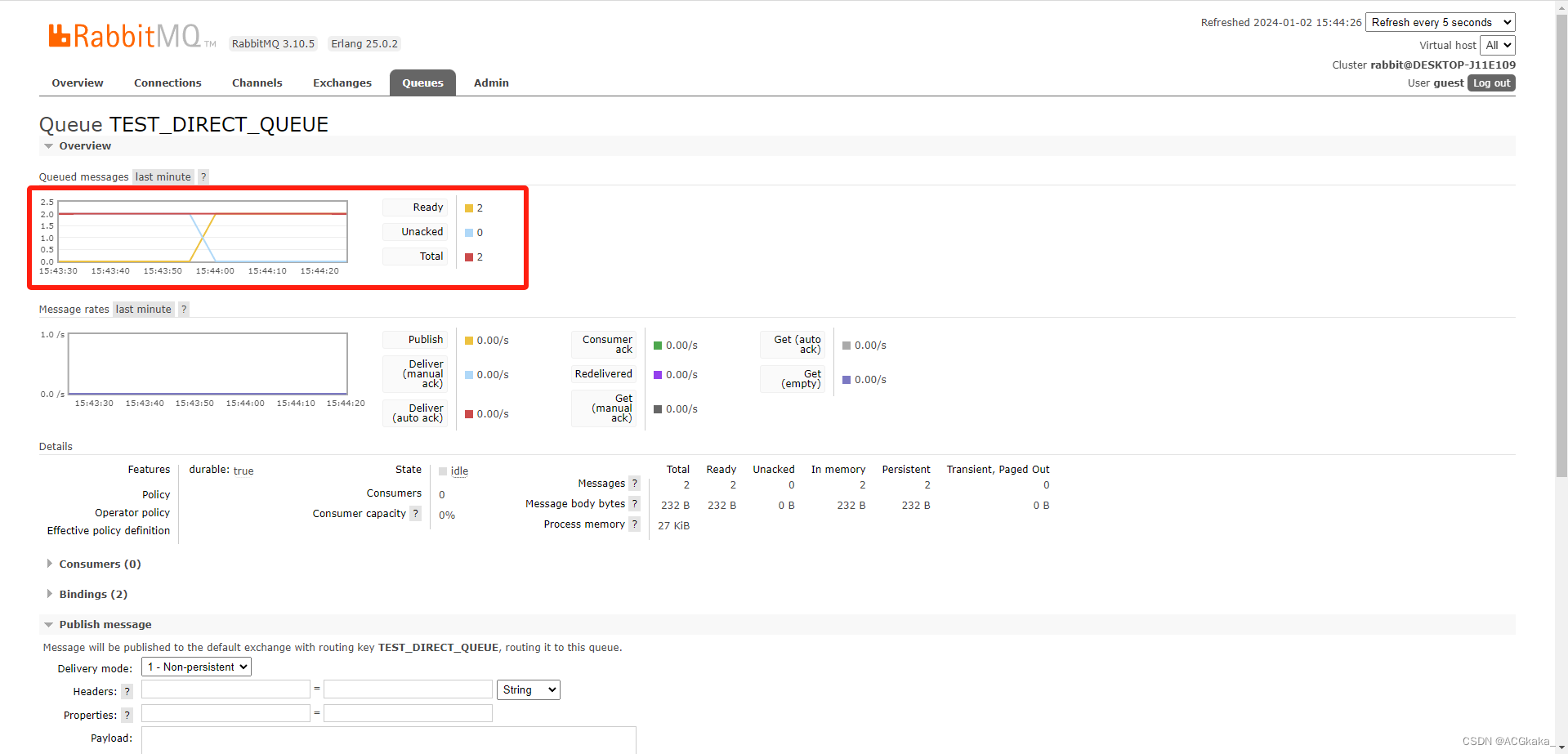
RabbitMQ(七)ACK 消息确认机制
目录 一、简介1.1 背景1.2 定义1.3 如何查看确认/未确认的消息数? 二、消息确认机制的分类2.1 消息发送确认1)ConfirmCallback方法2)ReturnCallback方法3)代码实现方式一:统一配置a.配置类a.生产者c.消费者d.测试结果 …...

ubuntu 编译内核报错
Ubuntu 编译 Linux 内核经常会遇到如下错误: 如果报错 canonical-certs.pem: 如下: make[1]: *** No rule to make target ‘debian/canonical-certs.pem’, needed by ‘certs/x509_certificate_list’. Stop. make: *** [Makefile:1868: …...

Python之自然语言处理库snowNLP
一、介绍 SnowNLP是一个python写的类库,可以方便的处理中文文本内容,是受到了TextBlob的启发而写的,由于现在大部分的自然语言处理库基本都是针对英文的,于是写了一个方便处理中文的类库,并且和TextBlob不同的是&…...
C# 语法进阶 委托
1.委托 委托是一个引用类型,其实他是一个类,保存方法的指针 (指针:保存一个变量的地址)他指向一个方法,当我们调用委托的时候这个方法就立即被执行 关键字:delegate 运行结果: 思…...
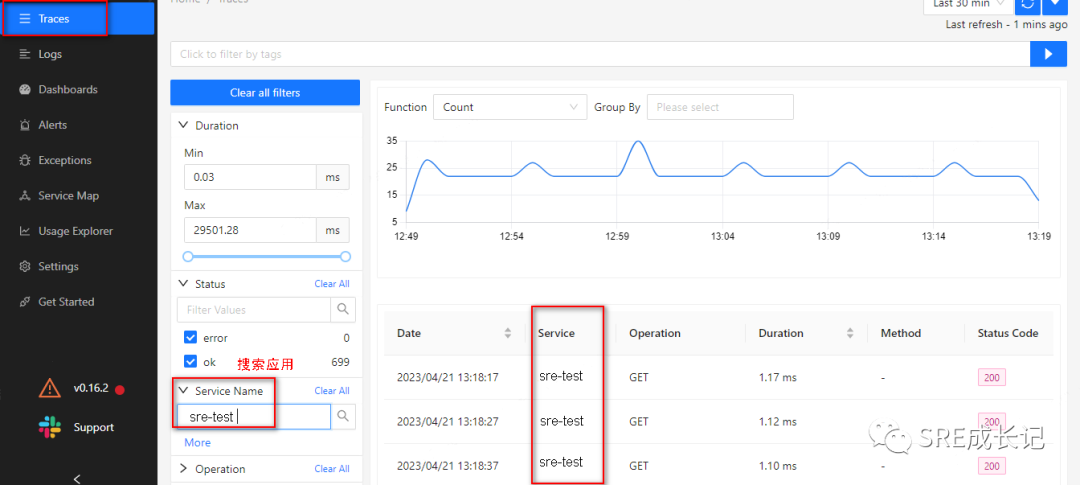
开源可观测性平台Signoz(四)【链路监控及数据库中间件监控篇】
转载说明:如果您喜欢这篇文章并打算转载它,请私信作者取得授权。感谢您喜爱本文,请文明转载,谢谢。 前文链接: 开源可观测性平台Signoz系列(一)【开篇】 开源可观测性平台Signoz&…...

【嵌入式开发 Linux 常用命令系列 4.2 -- git .gitignore 使用详细介绍】
文章目录 .gitignore 使用详细介绍.gitignore 文件的位置.gitignore 语法规则使用示例注意事项 .gitignore 使用详细介绍 .gitignore 文件是一个特殊的文本文件,它告诉 Git 哪些文件或目录是可以被忽略的,即不应该被纳入版本控制系统。这主要用于避免一…...

【熔断限流组件resilience4j和hystrix】
文章目录 🔊博主介绍🥤本文内容起因resilience4j落地实现pom.xml依赖application.yml配置接口使用 hystrix 落地实现pom.xml依赖启动类上添加注解接口上使用 📢文章总结📥博主目标 🔊博主介绍 🌟我是廖志伟…...
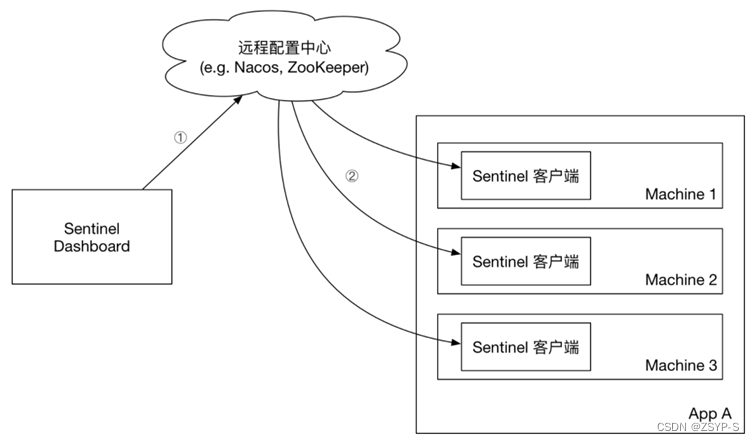
微服务雪崩问题及解决方案
雪崩问题 微服务中,服务间调用关系错综复杂,一个微服务往往依赖于多个其它微服务。 微服务之间相互调用,因为调用链中的一个服务故障,引起整个链路都无法访问的情况。 如果服务提供者A发生了故障,当前的应用的部分业务…...
008、所有权
所有权可以说是Rust中最为独特的一个功能了。正是所有权概念和相关工具的引入,Rust才能够在没有垃圾回收机制的前提下保障内存安全。 因此,正确地了解所有权概念及其在Rust中的实现方式,对于所有Rust开发者来讲都是十分重要的。在本文中&…...

千里马2023年终总结-android framework实战
背景: hi粉丝朋友们: 2023年马上就过去了,很多学员朋友也都希望马哥这边写个年终总结,因为这几个月时间都忙于新课程halsystracesurfaceflinger专题的开发,差点都忘记了这个事情了,今天特别花时间来写个bl…...

vue3中pinia的使用及持久化(详细解释)
解释一下pinia: Pinia是一个基于Vue3的状态管理库,它提供了类似Vuex的功能,但是更加轻量化和简单易用。Pinia的核心思想是将所有状态存储在单个store中,并且将store的行为和数据暴露为可响应的API,从而实现数据&#…...

安装 yarn、pnpm、功能比较
安装 yarn 官网:https://classic.yarnpkg.com/ 快速、可靠和安全的依赖性管理。 Yarn是您代码的软件包管理器。它允许您使用和共享(例如JavaScript)与来自世界各地的其他开发人员一起编写代码。Yarn是一个新的快速安全可信赖的可以替代 NP…...

计算机专业个人简历范文(8篇)
HR浏览一份简历也就25秒左右,如果你连「好简历」都没有,怎么能找到好工作呢? 如果你不懂得如何在简历上展示自己,或者觉得怎么改简历都不出彩,那请你一定仔细读完。 互联网运营个人简历范文> 男 22 本科 AI简历…...

几个实用网站
论文短语:https://www.phrasebank.manchester.ac.uk/ 翻译:https://www.deepl.com/en/translator 润色:https://quillbot.com/ 榜单:www.paperwithcode.com ****NLP民工的乐园: 几乎最全的中文NLP资源库:****https…...

Pycharm 切换interpreter---python的环境和第三方库问题
这篇回答两个问题: 1.为什么在 pycharm中打开新的project,切换interpreter 之后发现自己之前装的库消失了? 2.为什么 interpreter 切换到python3.8了, terminal 还是在 3.9?? 问题的关键:搞懂什…...

TP-LINK 路由器忘记密码 - 恢复出厂设置
TP-LINK 路由器忘记密码 - 恢复出厂设置 1. 恢复出厂设置2. 创建管理员密码3. 上网设置4. 无线设置5. TP-LINK ID6. 网络状态References 1. 恢复出厂设置 在设备通电的情况下,按住路由器背面的 Reset 按钮直到所有指示灯同时亮起后松开。 2. 创建管理员密码 3. 上网…...

关闭 Elasticsearch 集群的安全性设置
关闭 Elasticsearch 集群的安全性设置,特别是如果您正在使用 X-Pack,涉及到修改 Elasticsearch 的配置。以下是一般步骤,但请注意,这可能会使您的 Elasticsearch 集群面临安全风险,因此建议仅在开发或测试环境中执行此…...
[技术分享]一招解决 MySQL 中 DDL 被阻塞的问题
爱可生开源社区. 爱可生开源社区,提供稳定的MySQL企业级开源工具及服务,每年1024开源一款优良组件,并持续运营维护。 背景 之前碰到客户咨询定位DDL阻塞的相关问题,整理了一下方法,如何解决DDL被阻塞的问题。下面,就这个问题,整理了一下思路: 怎么判断一个 DDL 是…...
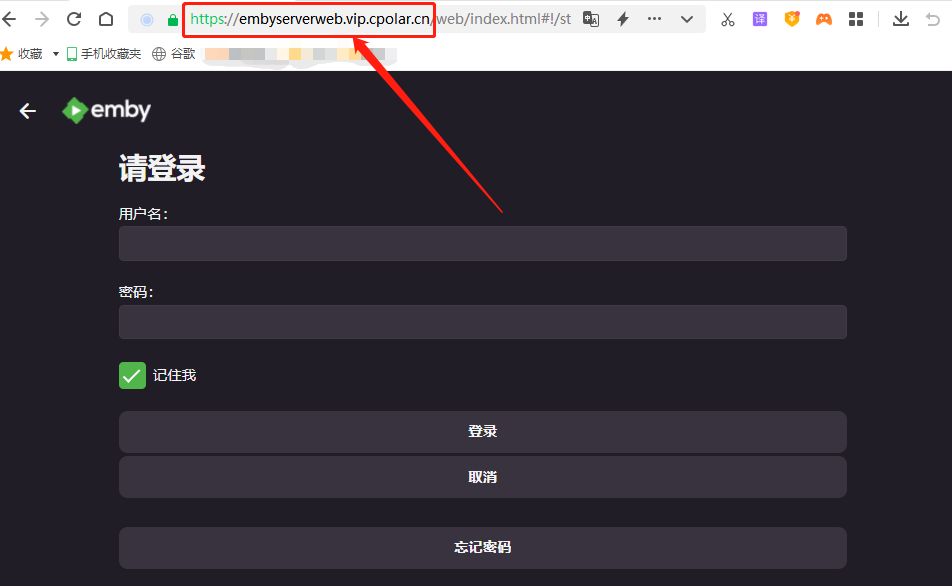
Windows搭建Emby媒体库服务器,无公网IP远程访问本地影音文件
文章目录 1.前言2. Emby网站搭建2.1. Emby下载和安装2.2 Emby网页测试 3. 本地网页发布3.1 注册并安装cpolar内网穿透3.2 Cpolar云端设置3.3 Cpolar内网穿透本地设置 4.公网访问测试5.结语 1.前言 在现代五花八门的网络应用场景中,观看视频绝对是主力应用场景之一&…...
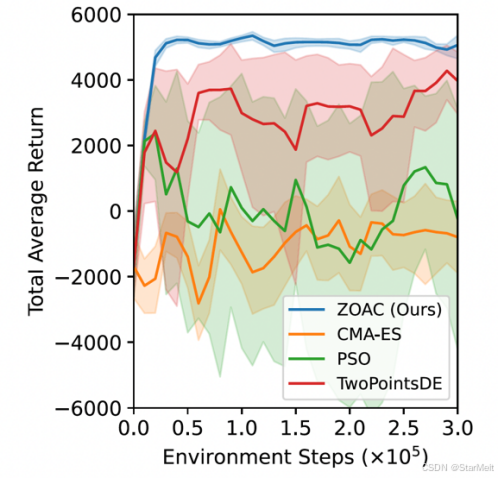
突破不可导策略的训练难题:零阶优化与强化学习的深度嵌合
强化学习(Reinforcement Learning, RL)是工业领域智能控制的重要方法。它的基本原理是将最优控制问题建模为马尔可夫决策过程,然后使用强化学习的Actor-Critic机制(中文译作“知行互动”机制),逐步迭代求解…...

【Linux】C语言执行shell指令
在C语言中执行Shell指令 在C语言中,有几种方法可以执行Shell指令: 1. 使用system()函数 这是最简单的方法,包含在stdlib.h头文件中: #include <stdlib.h>int main() {system("ls -l"); // 执行ls -l命令retu…...

04-初识css
一、css样式引入 1.1.内部样式 <div style"width: 100px;"></div>1.2.外部样式 1.2.1.外部样式1 <style>.aa {width: 100px;} </style> <div class"aa"></div>1.2.2.外部样式2 <!-- rel内表面引入的是style样…...

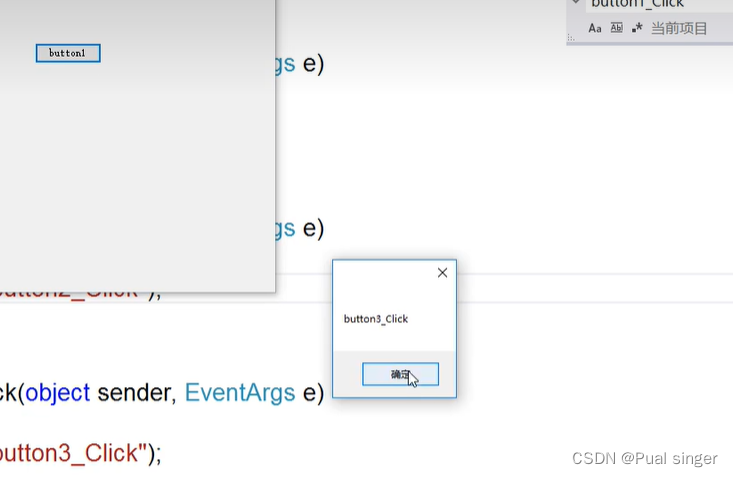
【JavaSE】绘图与事件入门学习笔记
-Java绘图坐标体系 坐标体系-介绍 坐标原点位于左上角,以像素为单位。 在Java坐标系中,第一个是x坐标,表示当前位置为水平方向,距离坐标原点x个像素;第二个是y坐标,表示当前位置为垂直方向,距离坐标原点y个像素。 坐标体系-像素 …...

Web 架构之 CDN 加速原理与落地实践
文章目录 一、思维导图二、正文内容(一)CDN 基础概念1. 定义2. 组成部分 (二)CDN 加速原理1. 请求路由2. 内容缓存3. 内容更新 (三)CDN 落地实践1. 选择 CDN 服务商2. 配置 CDN3. 集成到 Web 架构 …...
Cilium动手实验室: 精通之旅---13.Cilium LoadBalancer IPAM and L2 Service Announcement
Cilium动手实验室: 精通之旅---13.Cilium LoadBalancer IPAM and L2 Service Announcement 1. LAB环境2. L2公告策略2.1 部署Death Star2.2 访问服务2.3 部署L2公告策略2.4 服务宣告 3. 可视化 ARP 流量3.1 部署新服务3.2 准备可视化3.3 再次请求 4. 自动IPAM4.1 IPAM Pool4.2 …...

深入理解 React 样式方案
React 的样式方案较多,在应用开发初期,开发者需要根据项目业务具体情况选择对应样式方案。React 样式方案主要有: 1. 内联样式 2. module css 3. css in js 4. tailwind css 这些方案中,均有各自的优势和缺点。 1. 方案优劣势 1. 内联样式: 简单直观,适合动态样式和…...

初探用uniapp写微信小程序遇到的问题及解决(vue3+ts)
零、关于开发思路 (一)拿到工作任务,先理清楚需求 1.逻辑部分 不放过原型里说的每一句话,有疑惑的部分该问产品/测试/之前的开发就问 2.页面部分(含国际化) 整体看过需要开发页面的原型后,分类一下哪些组件/样式可以复用,直接提取出来使用 (时间充分的前提下,不…...

Python打卡训练营学习记录Day49
知识点回顾: 通道注意力模块复习空间注意力模块CBAM的定义 作业:尝试对今天的模型检查参数数目,并用tensorboard查看训练过程 import torch import torch.nn as nn# 定义通道注意力 class ChannelAttention(nn.Module):def __init__(self,…...

八、【ESP32开发全栈指南:UDP客户端】
1. 环境准备 安装ESP-IDF v4.4 (官方指南)确保Python 3.7 和Git已安装 2. 创建项目 idf.py create-project udp_client cd udp_client3. 完整优化代码 (main/main.c) #include <string.h> #include "freertos/FreeRTOS.h" #include "freertos/task.h&…...