机器人相关知识
机器人学(Robotics)
一些基础概念
位姿
位姿=位置+姿态
位姿的表示
刚体
刚性物体是一组粒子的集合,其中任意两个粒子之间的距离保持固定,不受物体运动或施加在物体上的力的影响。
“完全不可变形”的物体就是刚体。
刚体位置
刚性连杆
在理想状态下,忽略掉实际情况中的结构形变,我们可以将操作臂视为一系列刚体通过关节连接形成的一个运动链,我们将这些刚体称为连杆。
自由度
机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度。
机动度

柔性
即,机器人可编程。
操作点
操作者在机械臂上选择的一个点,通过这个点来秒速机械臂的运动。
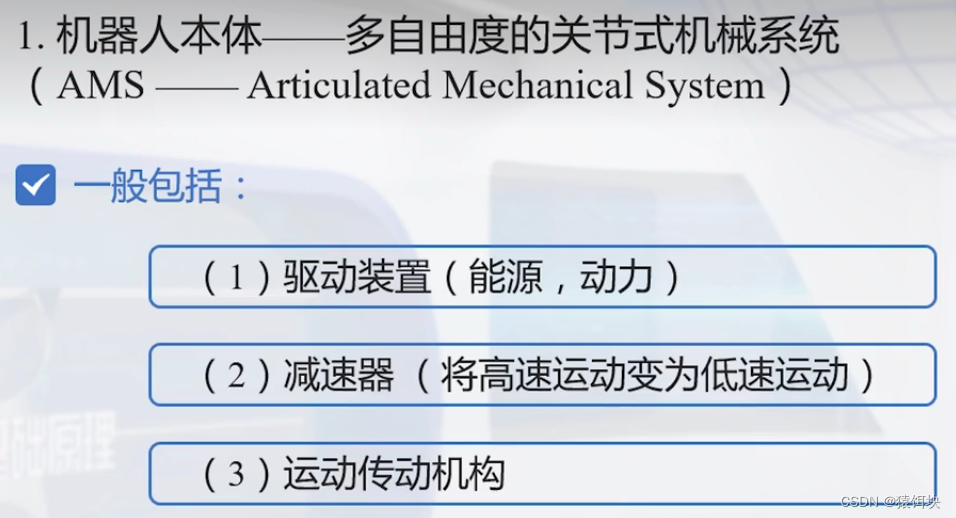
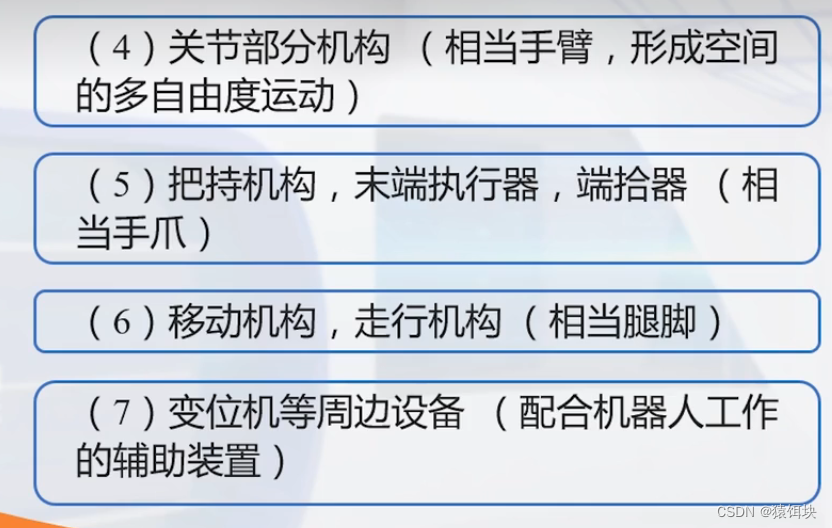
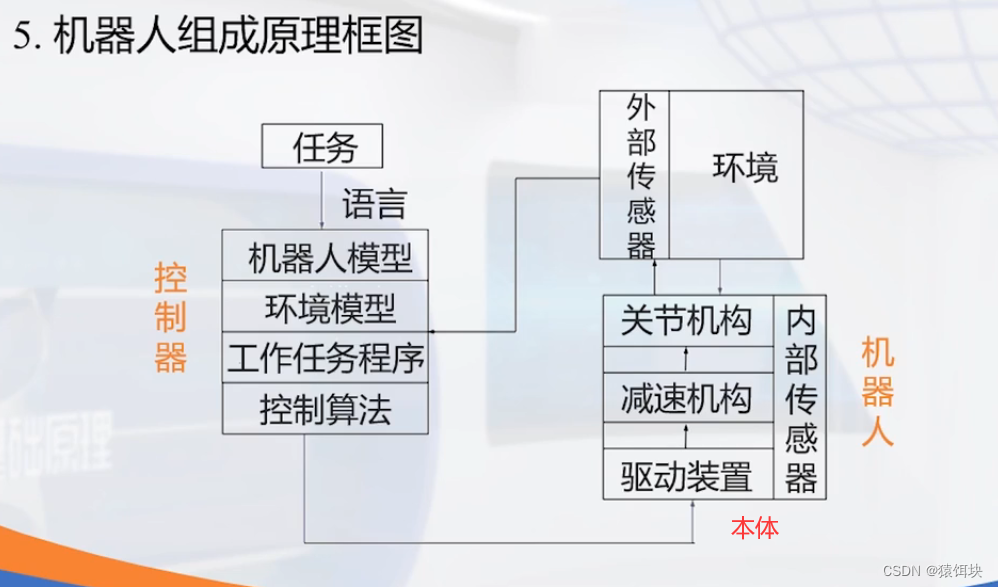
机器人的基本组成
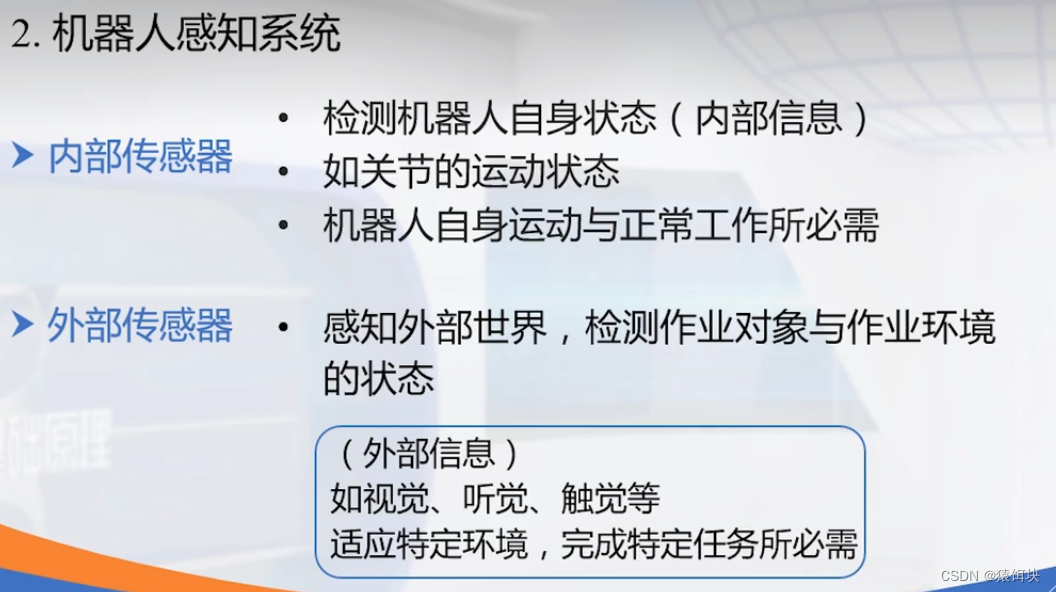
机器人感知系统
机器人的控制系统

机器人决策系统

机器人组成原理抠图
机器人的一些基本概念: 位置,姿态,姿态可以用欧拉角、四元数或旋转矩阵描述,位姿矩阵(4x4的齐次矩阵),轴(joint),连杆(link),自由度(degree of freedom), 末端, 法兰,运动学正解是由各轴角度求末端位姿,运动学逆解是由末端位姿求各轴角度,动力学正解,动力学逆解,位置、速度、加速度、力矩,机器人路径规划是规划的位置点,轨迹规划是位置点+速度点+加速度点
机械臂正运动学
机械臂逆运动学
相关文章:
机器人相关知识
机器人学(Robotics) 一些基础概念 位姿 位姿位置姿态 位姿的表示 刚体 刚性物体是一组粒子的集合,其中任意两个粒子之间的距离保持固定,不受物体运动或施加在物体上的力的影响。 “完全不可变形”的物体就是刚体。 刚体位置 刚性连杆 …...
)
八股文打卡day22——操作系统(5)
面试题:什么是死锁?如何避免死锁? 我的回答: 死锁是两个或者多个进程都占有各自的资源,然后都互相请求资源,导致互相都陷入了阻塞状态。 如何避免死锁呢? 首先,造成死锁有四个必要…...

SQL Server 权限管理
CSDN 成就一亿技术人! 2024年 第一篇 难度指数:* * CSDN 成就一亿技术人! 目录 1. 权限管理 什么是权限管理? SQL server的安全机制 服务器级角色 数据库级角色 对象级角色 2. 创建用户 赋予权限 最重要的一步骤 1. 权限…...

ReentrantLock底层原理学习一
J.U.C 简介 Java.util.concurrent 是在并发编程中比较常用的工具类,里面包含很多用来在并发场景中使用的组件。比如线程池、阻塞队列、计时器、同步器、并发集合等等。并发包的作者是大名鼎鼎的 Doug Lea。我们在接下来的课程中,回去剖析一些经典的比较…...
数字孪生在增强现实(AR)中的应用
数字孪生在增强现实(Augmented Reality,AR)中的应用可以提供更丰富、交互性更强的现实世界增强体验。以下是数字孪生在AR中的一些应用,希望对大家有所帮助。北京木奇移动技术有限公司,专业的软件外包开发公司ÿ…...
【数据仓库与联机分析处理】多维数据模型
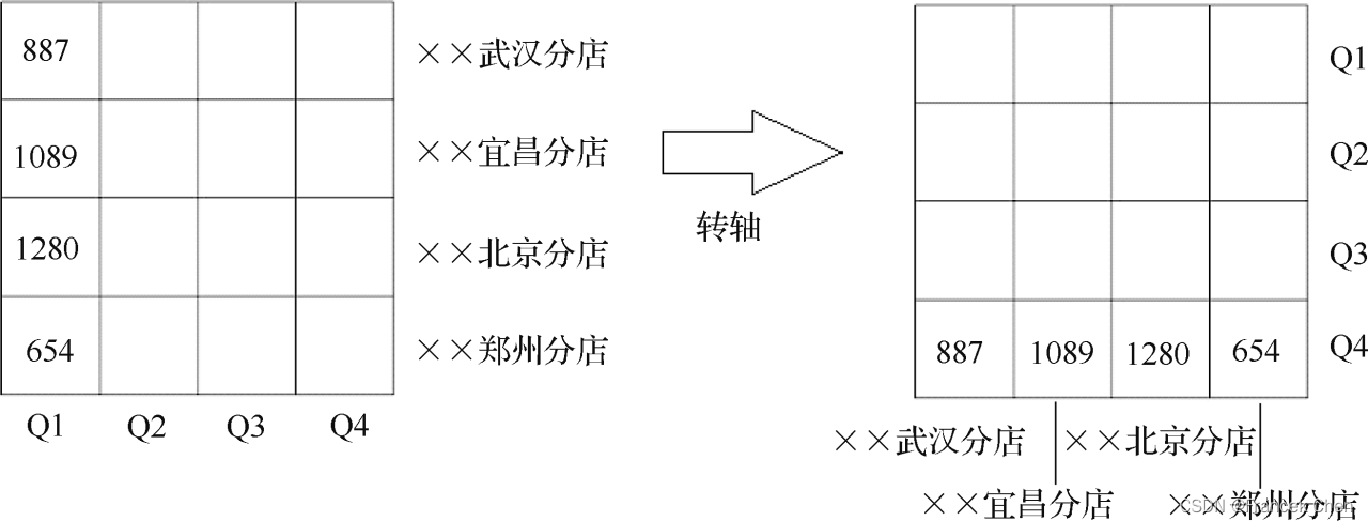
目录 一、数据立方体 二、数据模型 (一)星形模型 (二)雪花模式 (三)事实星座模式 三、多维数据模型中的OLAP操作 (一)下钻 (二)上卷 (三…...

【网络面试(3)】浏览器委托协议栈完成消息的收发
前面的博客中,提到过很多次,浏览器作为应用程序,本身是不具备向网络中发送网络请求的能力,要委托操作系统的内核协议栈来完成。协议栈再调用网卡驱动,通过网卡将请求消息发送出去,本篇博客就来探讨一下这个…...

Kotlin: Jetpack — ViewModel简单应用
ViewModel 概览 Android Jetpack 的一部分。 ViewModel 类是一种业务逻辑或屏幕级状态容器。它用于将状态公开给界面,以及封装相关的业务逻辑。 它的主要优点是,它可以缓存状态,并可在配置更改后持久保留相应状态。这意味着在 activity 之…...
【Java技术专题】「攻破技术盲区」攻破Java技术盲点之unsafe类的使用指南(打破Java的安全管控— sun.misc.unsafe)
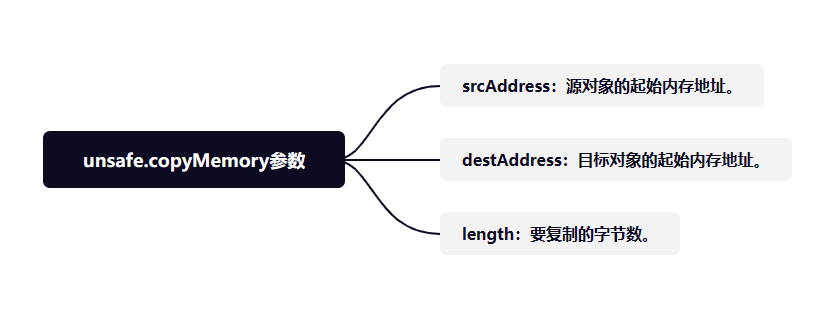
Java后门机制 — sun.misc.unsafe 打破Java的安全管控关于Unsafe的编程建议实例化Unsafe后门对象使用sun.misc.Unsafe创建实例单例模式处理实现浅克隆(直接获取内存的方式)直接使用copyMemory原理分析 密码安全使用Unsafe类—示例代码 运行时动态创建类超…...
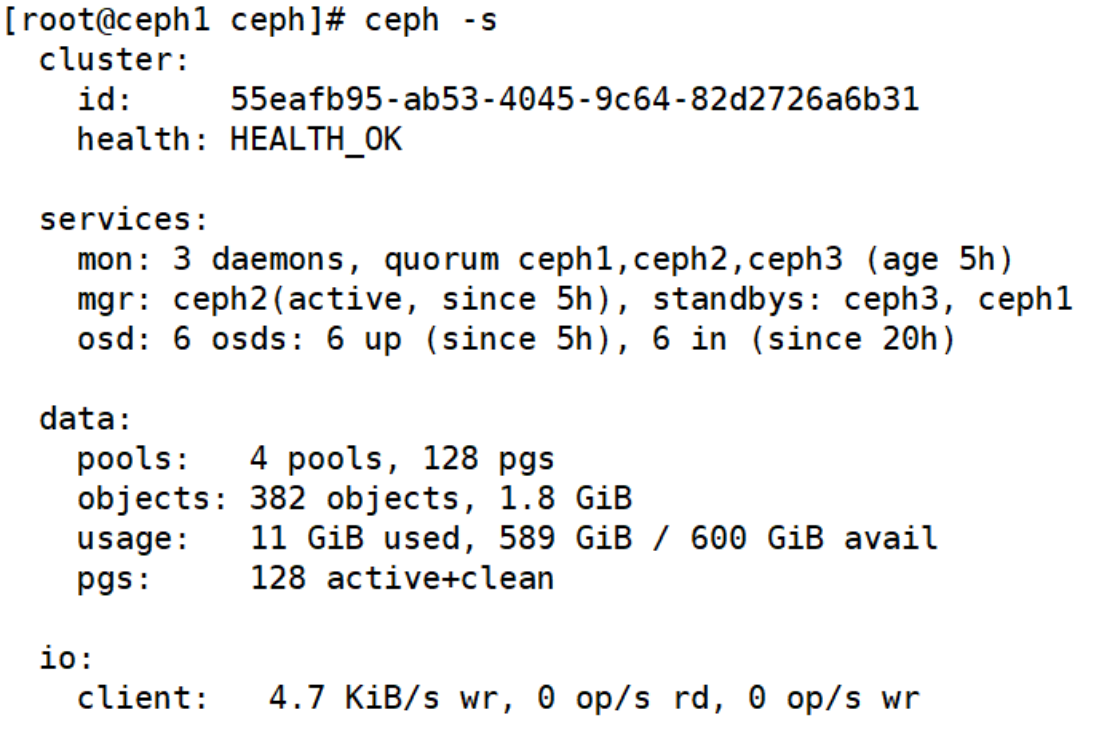
私有云平台搭建openstack和ceph结合搭建手册
OpenStack与云计算 什么是云? 如何正确理解云,可以从以下几个方面。 云的构成。 用户:对用户而言是透明无感知的,不用关心底层构成,只需要知道利用云完成自己任务即可。 云提供商:对云资产管理和运维。 云…...
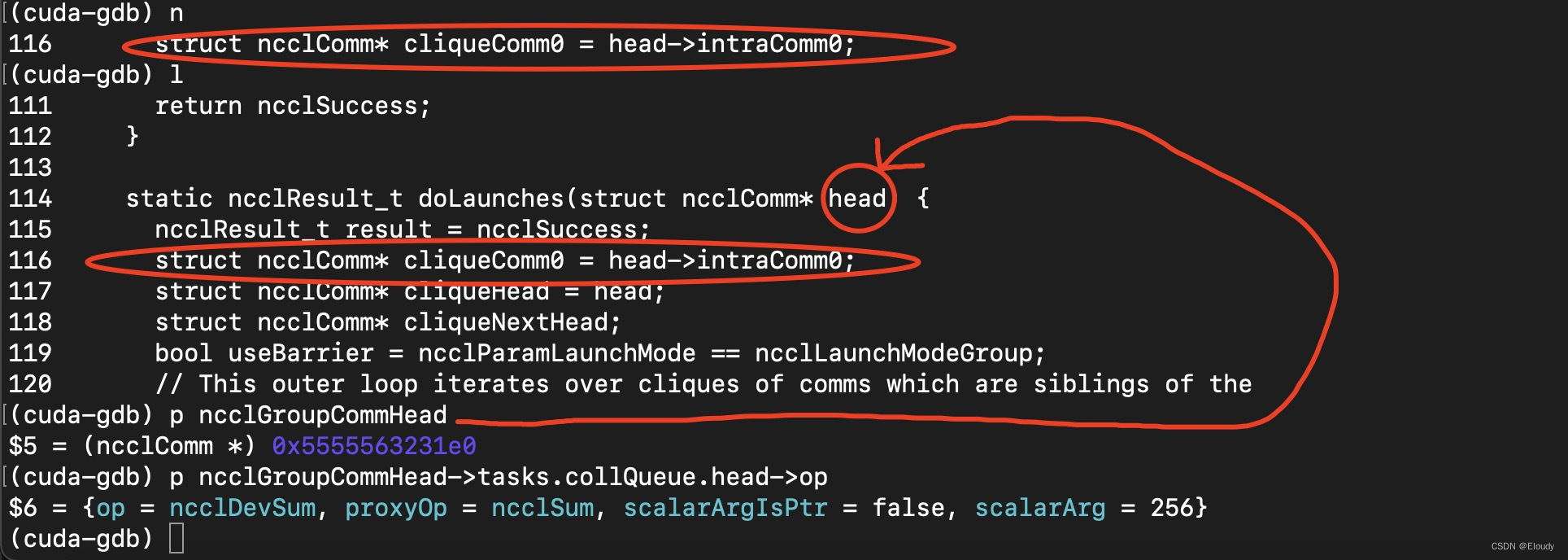
debug mccl 02 —— 环境搭建及初步调试
1, 搭建nccl 调试环境 下载 nccl 源代码 git clone --recursive https://github.com/NVIDIA/nccl.git 只debug host代码,故将设备代码的编译标志改成 -O3 (base) hipperhipper-G21:~/let_debug_nccl/nccl$ git diff diff --git a/makefiles/common.mk b/makefiles/…...

ros python 接收GPS RTK 串口消息再转发 ros 主题消息
代码是一个ROS(Robot Operating System)节点,用于从GPS设备读取RTK(实时动态)数据并通过ROS主题发布。 步骤: 导入必要的模块: rospy 是ROS的Python库,用于ROS的节点、发布者和订阅者。serial 用于串行通信。NavSatFix 和 NavSatStatus 是从GPS接收的NMEA 0183标准消息…...

2024年网络安全竞赛-页面信息发现任务解析
页面信息发现任务说明: 服务器场景:win20230305(关闭链接)在渗透机中对服务器信息收集,将获取到的服务器网站端口作为Flag值提交;访问服务器网站页面,找到主页面中的Flag值信息,将Flag值提交;访问服务器网站页面,找到主页面中的脚本信息,并将Flag值提交;访问服务器…...

ARM DMA使用整理
Direct Memory Access, 直接存储访问。同SPI,IIC,USART等一样,属于MCU的一个外设,用于在不需要MCU介入的情况下进行数据传输。可以将数据从外设传输到flash,也可以将数据从flash传输到外设,或者flash内部数据移动。 它…...
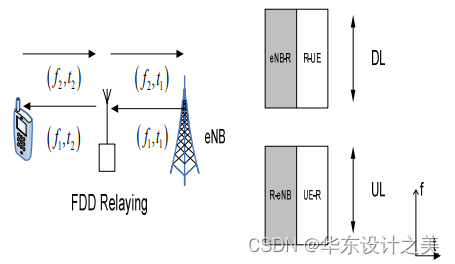
移动通信原理与关键技术学习(第四代蜂窝移动通信系统)
前言:LTE 标准于2008 年底完成了第一个版本3GPP Release 8的制定工作。另一方面,ITU 于2007 年召开了世界无线电会议WRC07,开始了B3G 频谱的分配,并于2008 年完成了IMT-2000(即3G)系统的演进——IMT-Advanc…...

光明源@智慧厕所技术:优化生活,提升卫生舒适度
在当今数字科技飞速发展的时代,我们的日常生活正在经历一场革命,而这场革命的其中一个前沿领域就是智慧厕所技术。这项技术不仅仅是对传统卫生间的一次升级,更是对我们生活品质的全方位提升。从智能感应到数据分析,从环保设计到舒…...

【Bootstrap学习 day13】
Bootstrap5 下拉菜单 下拉菜单通常用于导航标题内,在用户鼠标悬停或单击触发元素时显示相关链接列表。 基础的下拉列表 <div class"dropdown"><button type"button" class"btn btn-primary dropdown-toggle" data-bs-toggl…...

Shell:常用命令之dirname与basename
一、介绍 1、dirname命令用于去除文件名中的非目录部分,删除最后一个“\”后面的路径,显示父目录。 语法:dirname [选项] 参数 2、basename命令用于打印目录或者文件的基本名称,显示最后的目录名或文件名。 语法:basen…...
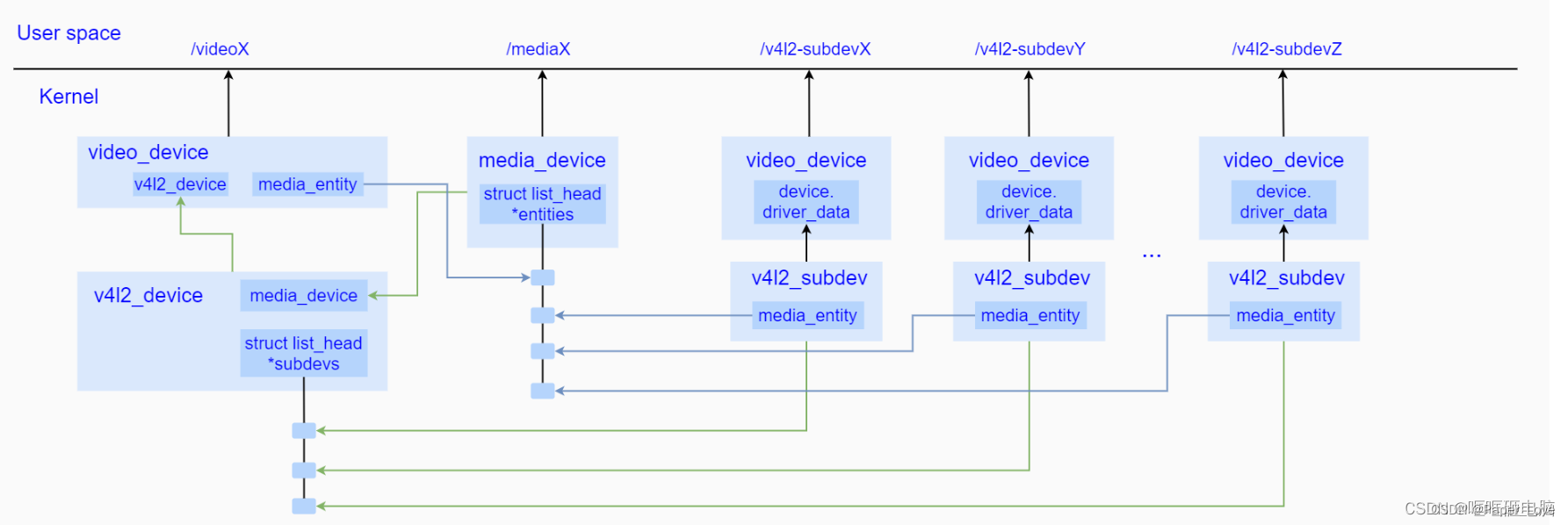
Linux-v4l2框架
框架图 从上图不难看出,v4l2_device作为顶层管理者,一方面通过嵌入到一个video_device中,暴露video设备节点给用户空间进行控制;另一方面,video_device内部会创建一个media_entity作为在media controller中的抽象体&a…...

VPC网络架构下的网络上数据采集
介绍 想象这样一个场景,一开始在公司里,所有的部门的物理机、POD都在一个经典网络内,它们可以通过 IP 访问彼此,没有任何限制。因此有很多系统基于此设计了很多点对点 IP 直连的访问,比如中心控制服务器 S 会主动访问物…...
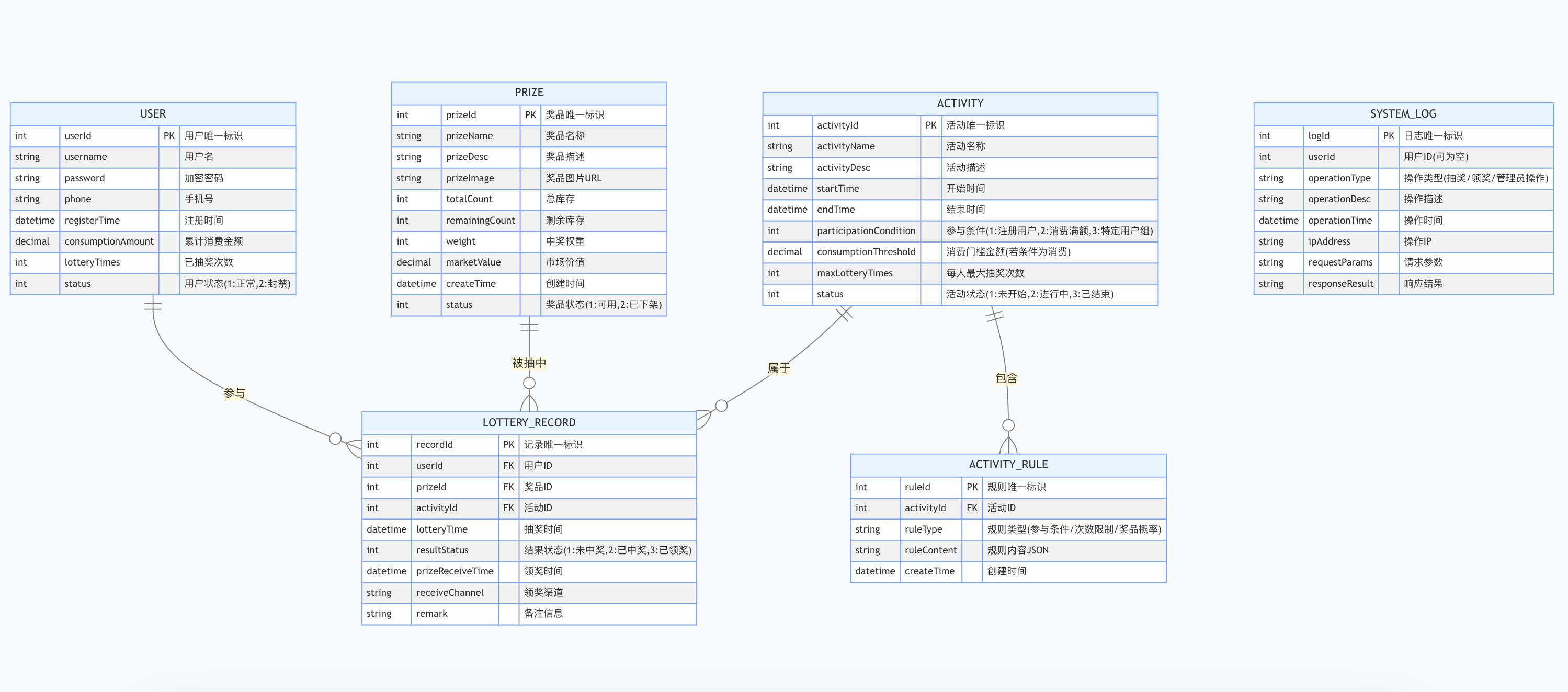
简易版抽奖活动的设计技术方案
1.前言 本技术方案旨在设计一套完整且可靠的抽奖活动逻辑,确保抽奖活动能够公平、公正、公开地进行,同时满足高并发访问、数据安全存储与高效处理等需求,为用户提供流畅的抽奖体验,助力业务顺利开展。本方案将涵盖抽奖活动的整体架构设计、核心流程逻辑、关键功能实现以及…...
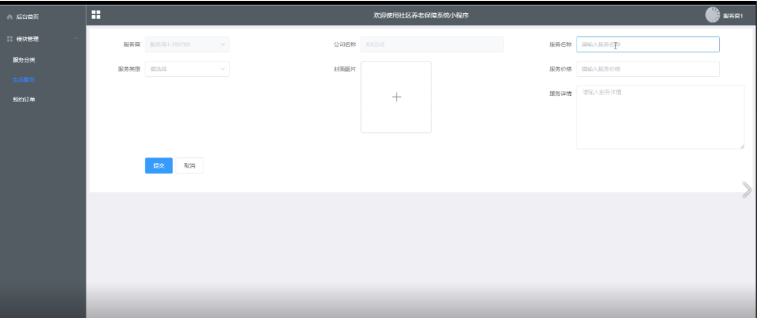
Springboot社区养老保险系统小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,社区养老保险系统小程序被用户普遍使用,为方…...
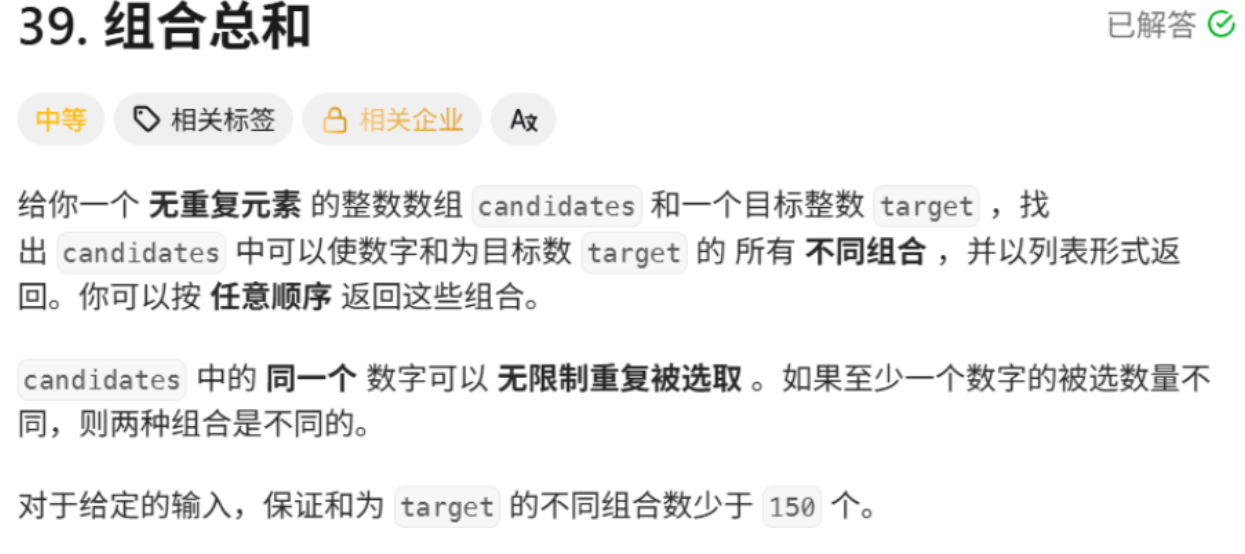
回溯算法学习
一、电话号码的字母组合 import java.util.ArrayList; import java.util.List;import javax.management.loading.PrivateClassLoader;public class letterCombinations {private static final String[] KEYPAD {"", //0"", //1"abc", //2"…...
处理vxe-table 表尾数据是单独一个接口,表格tableData数据更新后,需要点击两下,表尾才是正确的
修改bug思路: 分别把 tabledata 和 表尾相关数据 console.log() 发现 更新数据先后顺序不对 settimeout延迟查询表格接口 ——测试可行 升级↑:async await 等接口返回后再开始下一个接口查询 ________________________________________________________…...

Java数组Arrays操作全攻略
Arrays类的概述 Java中的Arrays类位于java.util包中,提供了一系列静态方法用于操作数组(如排序、搜索、填充、比较等)。这些方法适用于基本类型数组和对象数组。 常用成员方法及代码示例 排序(sort) 对数组进行升序…...
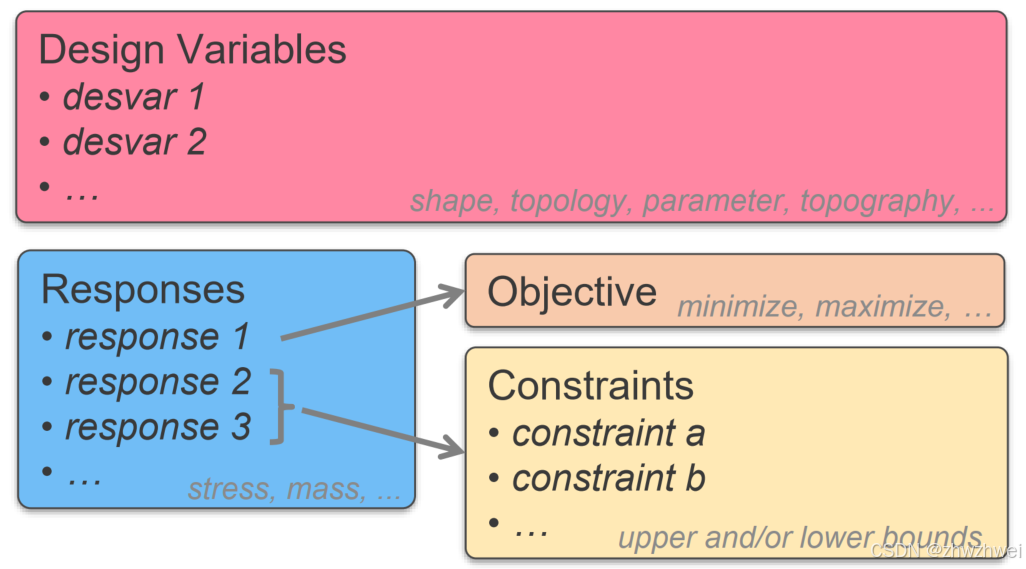
[拓扑优化] 1.概述
常见的拓扑优化方法有:均匀化法、变密度法、渐进结构优化法、水平集法、移动可变形组件法等。 常见的数值计算方法有:有限元法、有限差分法、边界元法、离散元法、无网格法、扩展有限元法、等几何分析等。 将上述数值计算方法与拓扑优化方法结合&#…...
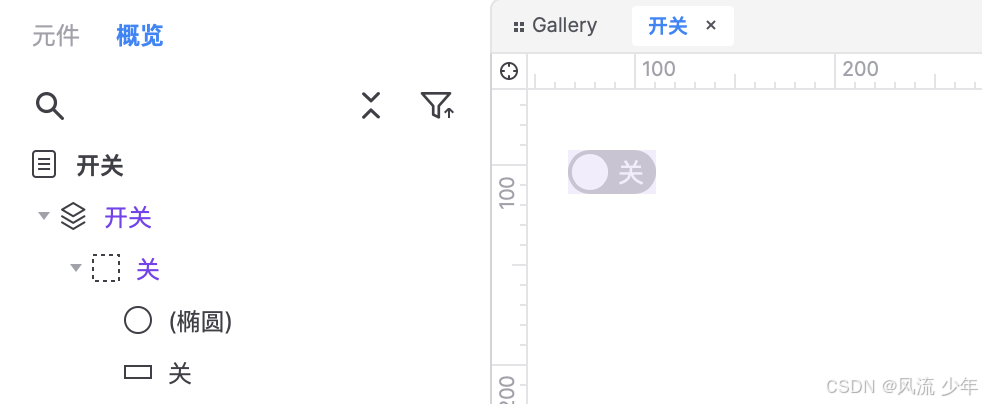
高保真组件库:开关
一:制作关状态 拖入一个矩形作为关闭的底色:44 x 22,填充灰色CCCCCC,圆角23,边框宽度0,文本为”关“,右对齐,边距2,2,6,2,文本颜色白色FFFFFF。 拖拽一个椭圆,尺寸18 x 18,边框为0。3. 全选转为动态面板状态1命名为”关“。 二:制作开状态 复制关状态并命名为”开…...
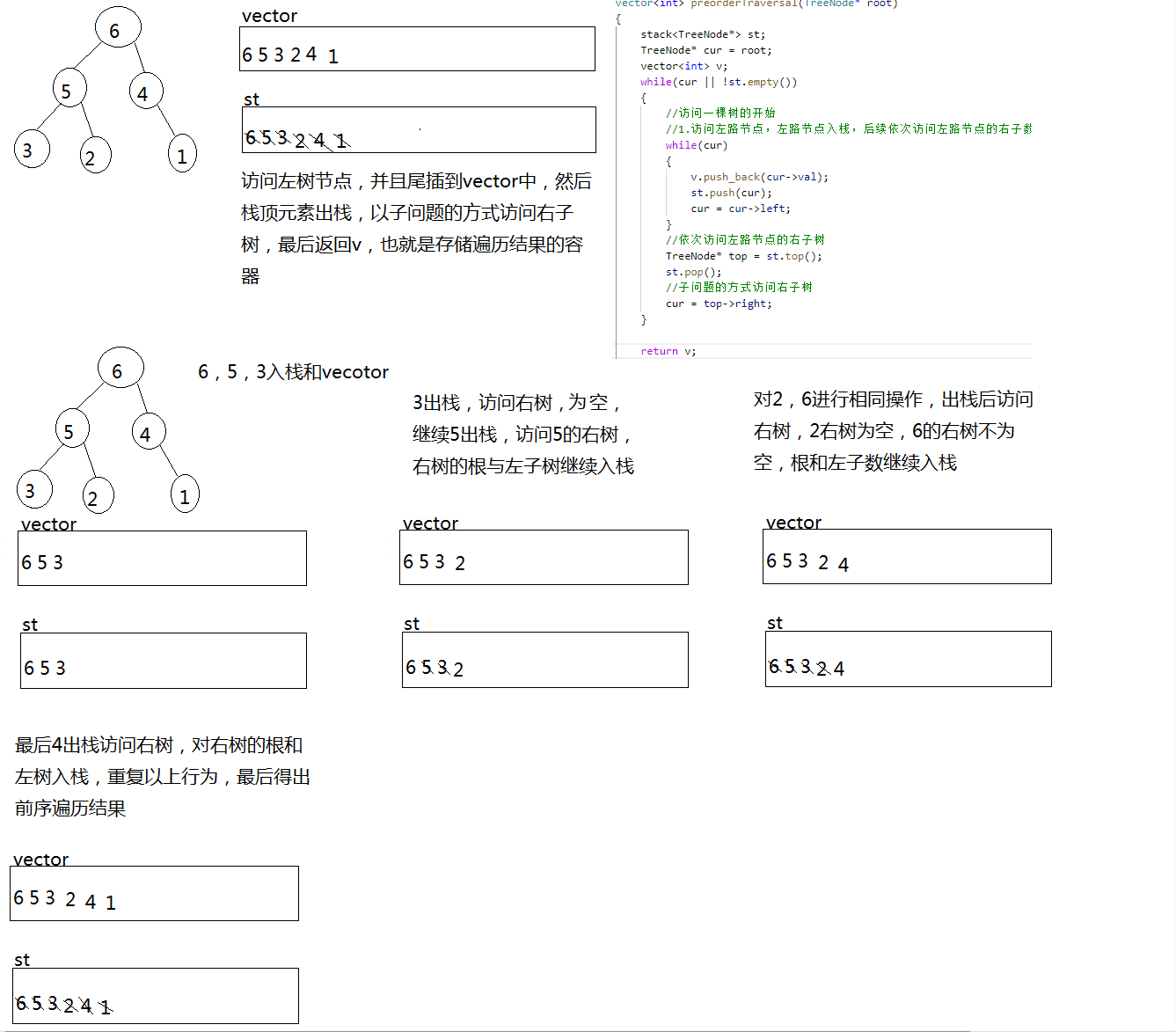
二叉树-144.二叉树的前序遍历-力扣(LeetCode)
一、题目解析 对于递归方法的前序遍历十分简单,但对于一位合格的程序猿而言,需要掌握将递归转化为非递归的能力,毕竟递归调用的时候会调用大量的栈帧,存在栈溢出风险。 二、算法原理 递归调用本质是系统建立栈帧,而非…...

RLHF vs RLVR:对齐学习中的两种强化方式详解
在语言模型对齐(alignment)中,强化学习(RL)是一种重要的策略。而其中两种典型形式——RLHF(Reinforcement Learning with Human Feedback) 与 RLVR(Reinforcement Learning with Ver…...

中国政务数据安全建设细化及市场需求分析
(基于新《政务数据共享条例》及相关法规) 一、引言 近年来,中国政府高度重视数字政府建设和数据要素市场化配置改革。《政务数据共享条例》(以下简称“《共享条例》”)的发布,与《中华人民共和国数据安全法》(以下简称“《数据安全法》”)、《中华人民共和国个人信息…...