STM32之 串口
串口通信
串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方 式的扩展接口。串行接口(Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简 单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成本,特别适用于远距离通信,但传送速度较慢。
设备之间的一种通信的方式(数据交互)
数据只能一位一位的进行传输
全双工通信
数据传输速度较慢
全双工通信(打电话)
通信允许数据在两个方向上同时传输,它在能力上相当于两个单工通信方式的结合。全双工指可以同时(瞬时)进行信号的双向传输(A→B且B→A)。指A→B的同时B→A,是瞬时同步的。通信允许数据在两个方向上同时传输,它在能力上相当于两个单工通信方式的结合。全双工指可以同时(瞬时)进行信号的双向传输(A→B且B→A)。指A→B的同时B→A,是瞬时同步的。
TTL电平
TTL是Transistor-Transistor Logic,即晶体管-晶体管逻辑的简称,它是计算机处理器控制的设备 内部各部分之间通信的标准技术。TTL电平信号应用广泛,是因为其数据表示采用二进制规定, +5V等价于逻辑”1”,0V等价于逻辑”0”。
字符帧
字符帧也叫数据帧,一帧数据由起始位、数据位、奇偶校验位和停止位组成,对于异步通信,要能够进行数据的正确传送,通信双方必须先约定好传送数据的速率和传送数据的组织格式,即波特率和字符帧的格式。
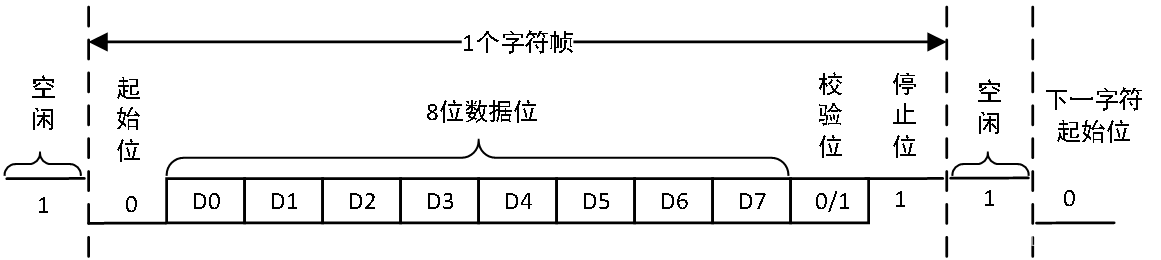
起始位:每开始一次通信时发送方先发出一个逻辑”0”的信号(低电平),表示传输字符的开始。
数据位:数据位可以是5、6、7、8,9位等,构成一个字符(一般都是8位)。如ASCII码(7位),扩展BCD码(8位)。先发送最低位,最后发送最高位,使用低电平表示‘0’高电平表示‘1’完成数据位的传输。
奇偶校验位:计算数据位中“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验数据传送的正确性,校验方式:
无校验 (no parity)。
奇校验 (odd parity): 如果数据位中“1”的数目是偶数,则校验位为“1”,如果“1的数目是奇数,校验位为“0”。
偶校验 (even parity): 如果数据为中“1”的数目是偶数,则校验位为“0”,如果为奇数,校验位为“1”。
mark parity: 校验位始终为1 (不常用)。
parity: 校验位始终为0 (不常用)。
停止位:一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。
总之,使用UART串口协议传输数据时,需要规定双方的传输速率(波特率)一致,数据格式(起始位,数据位,奇偶校验为、停止位)也要保持一致。例如传递字符a时,字符a的一帧信息由起始位、数据位(字符a)、奇偶校验位(可选)、停止位组成。
串口之非中断法
STM32的hal库关于串口的函数
HAL_UART_Transmit()
以阻塞的方式向串口发送数据,设定指定时间,超过指定时间后不再发送此次数据,不产生中断
原型:HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
参数:
UART_HandleTypeDef *huart:串口句柄
uint8_t *pData:向串口发送的数据的地址
uint16_t Size:向串口发送的数据的大小
uint32_t Timeout:此次数据发送的时间
实例:HAL_UART_Transmit(&huart1,(uint8_t *)"jiangxiaoya\n",strlen("jiangxiaoya\n"),100);
HAL_UART_Receive()
以阻塞的方式从串口接收数据,设定指定时间,超过指定时间后不再接收此次数据,不产生中断
原型:HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
参数:
UART_HandleTypeDef *huart:串口句柄
uint8_t *pData:从串口接收的数据的存放地址
uint16_t Size:从串口接收的数据的大小(留一个字符存放 '\0' )
uint32_t Timeout:此次数据接收的时间
实例:HAL_UART_Receive(&huart1,myData,sizeof(myData) - 1,100);
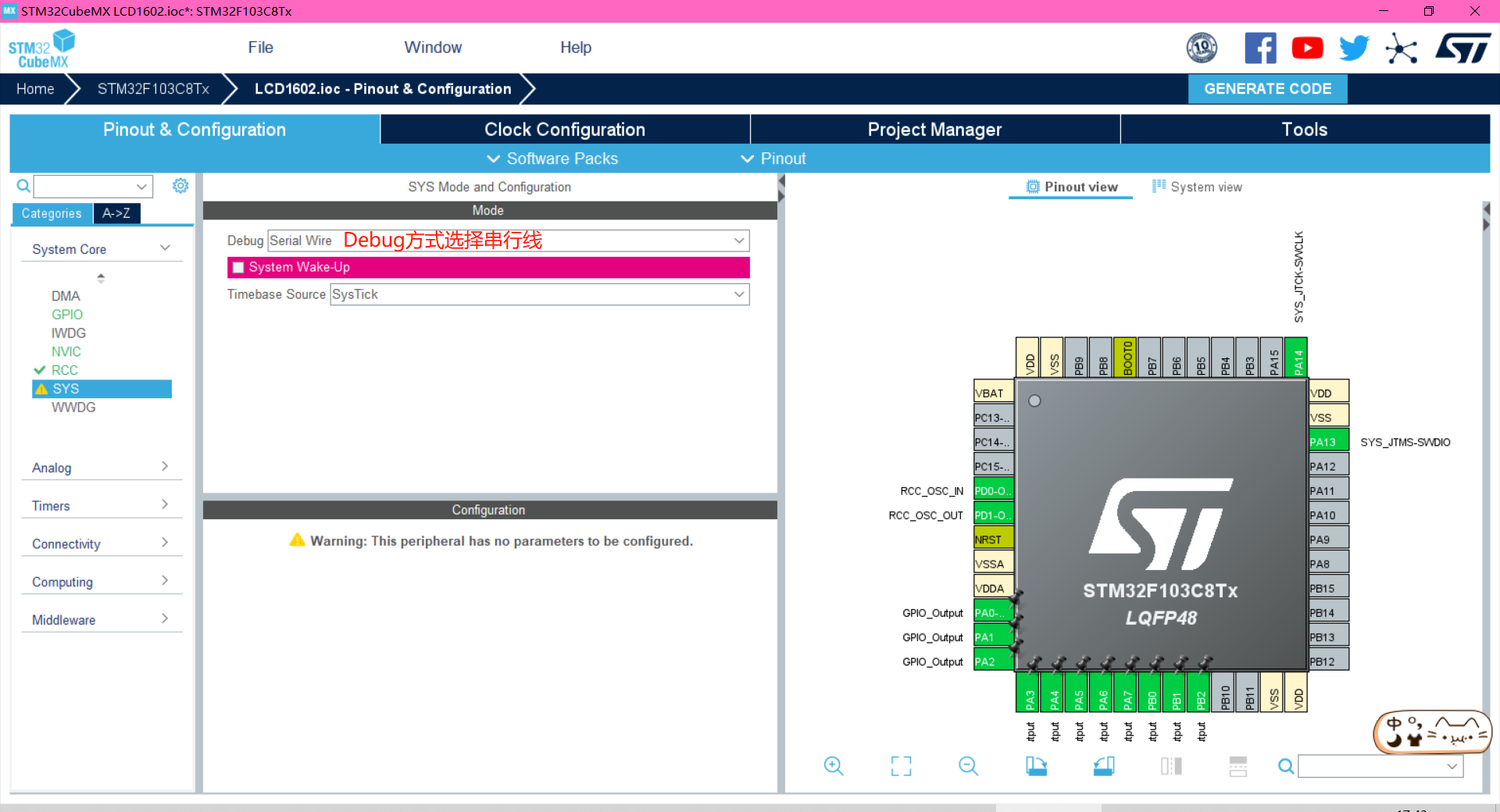
使用STM32CubeMX创建工程
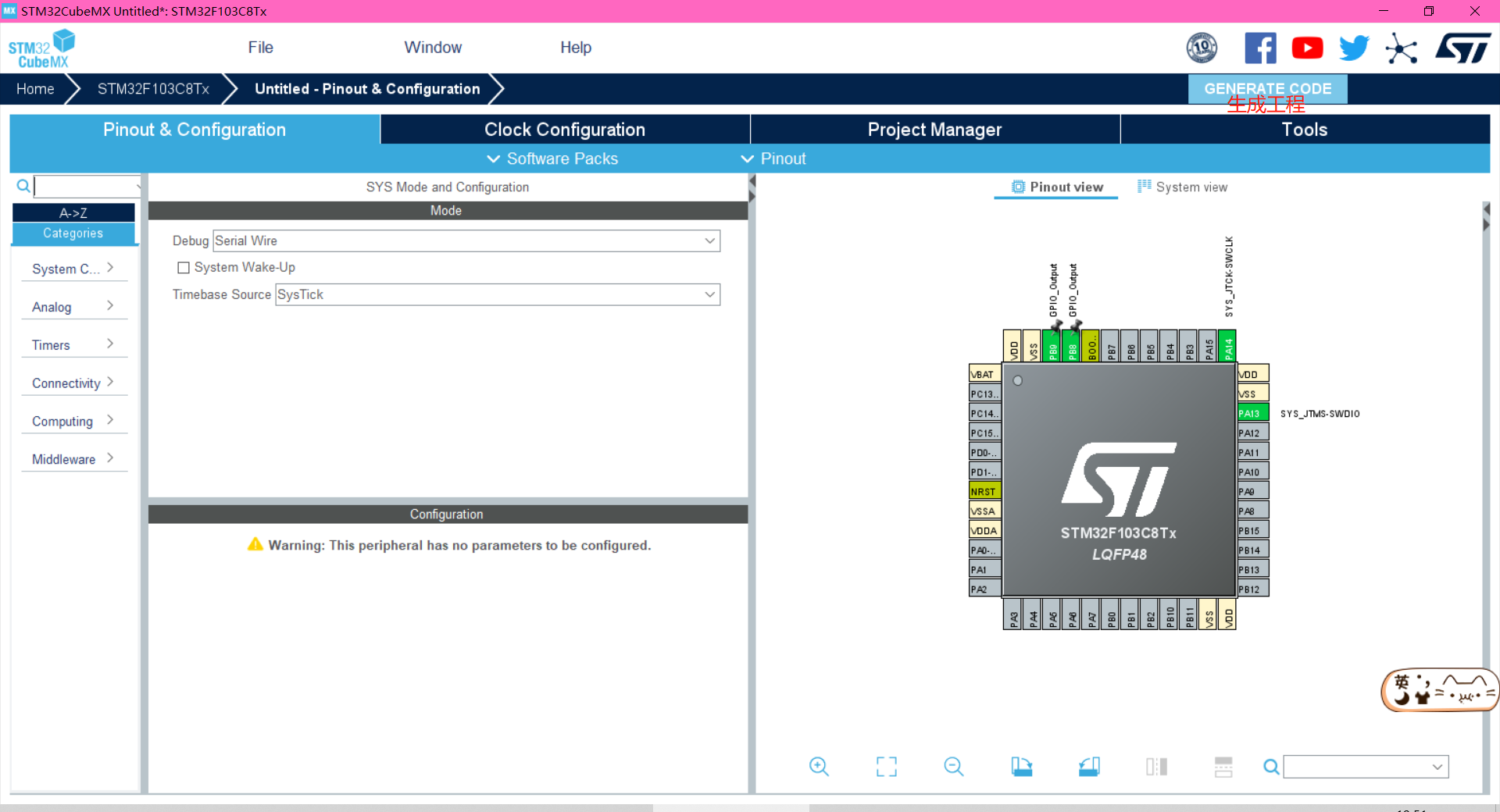
配置SYS
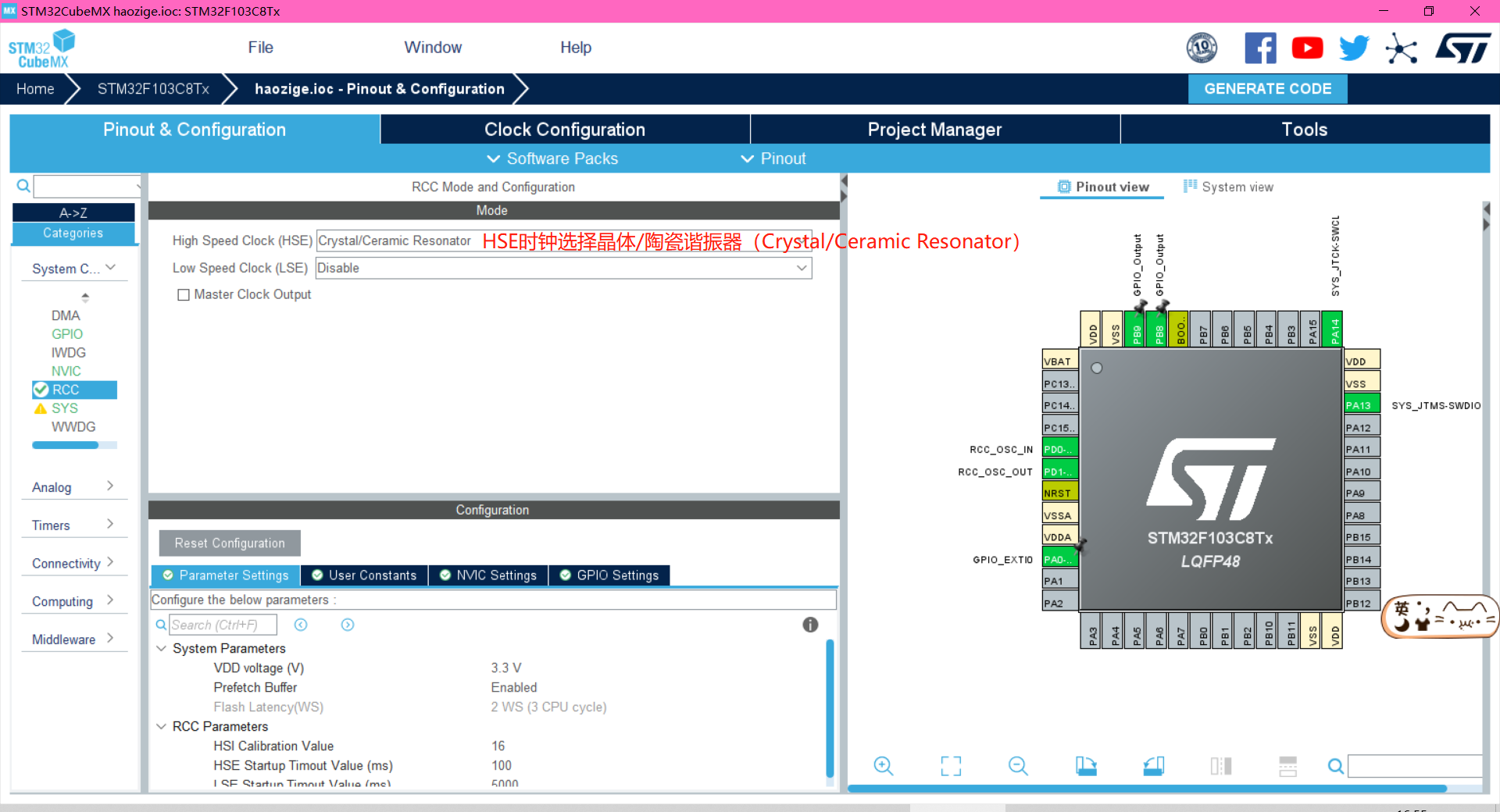
配置RCC
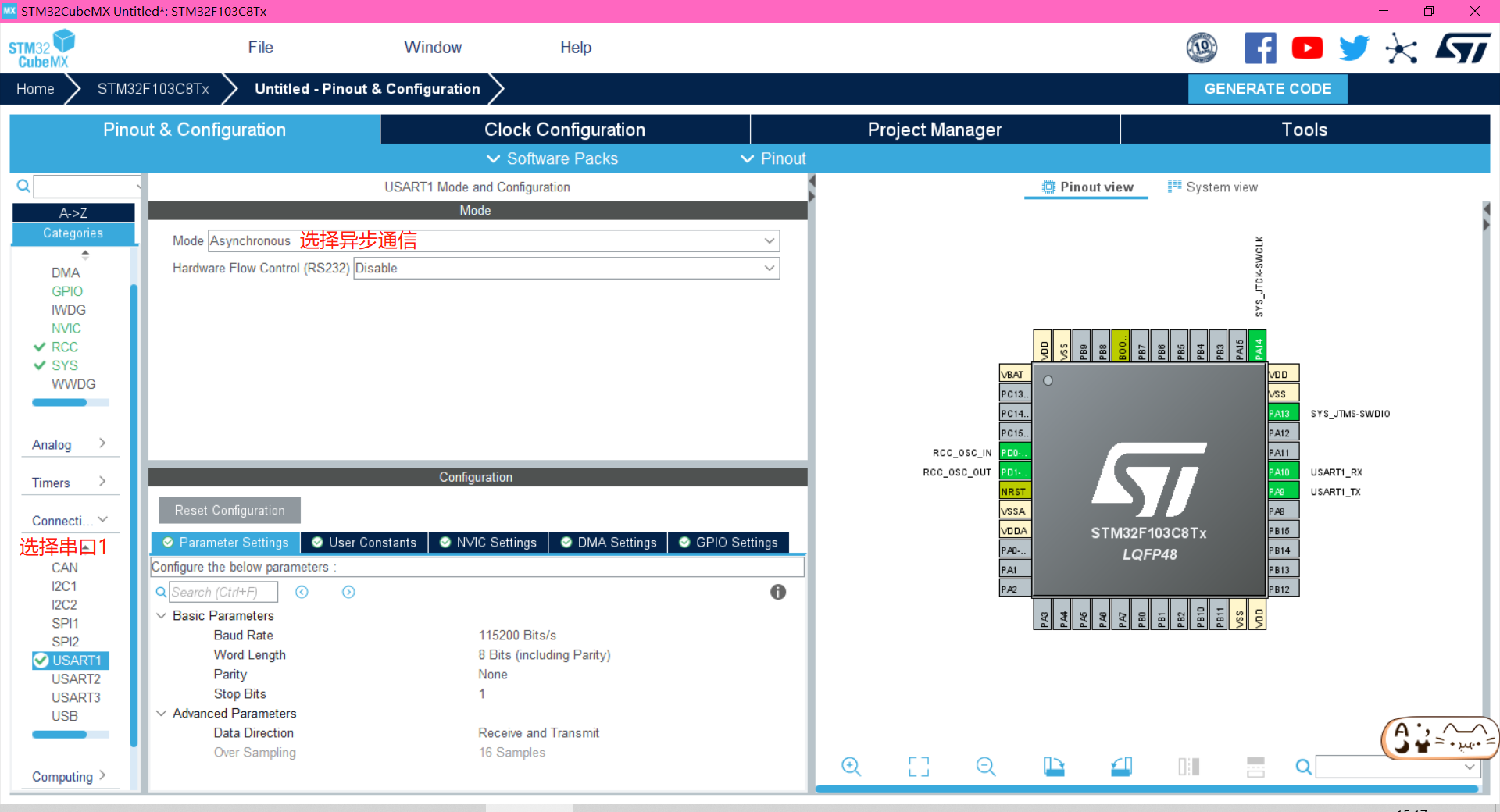
配置串口信息
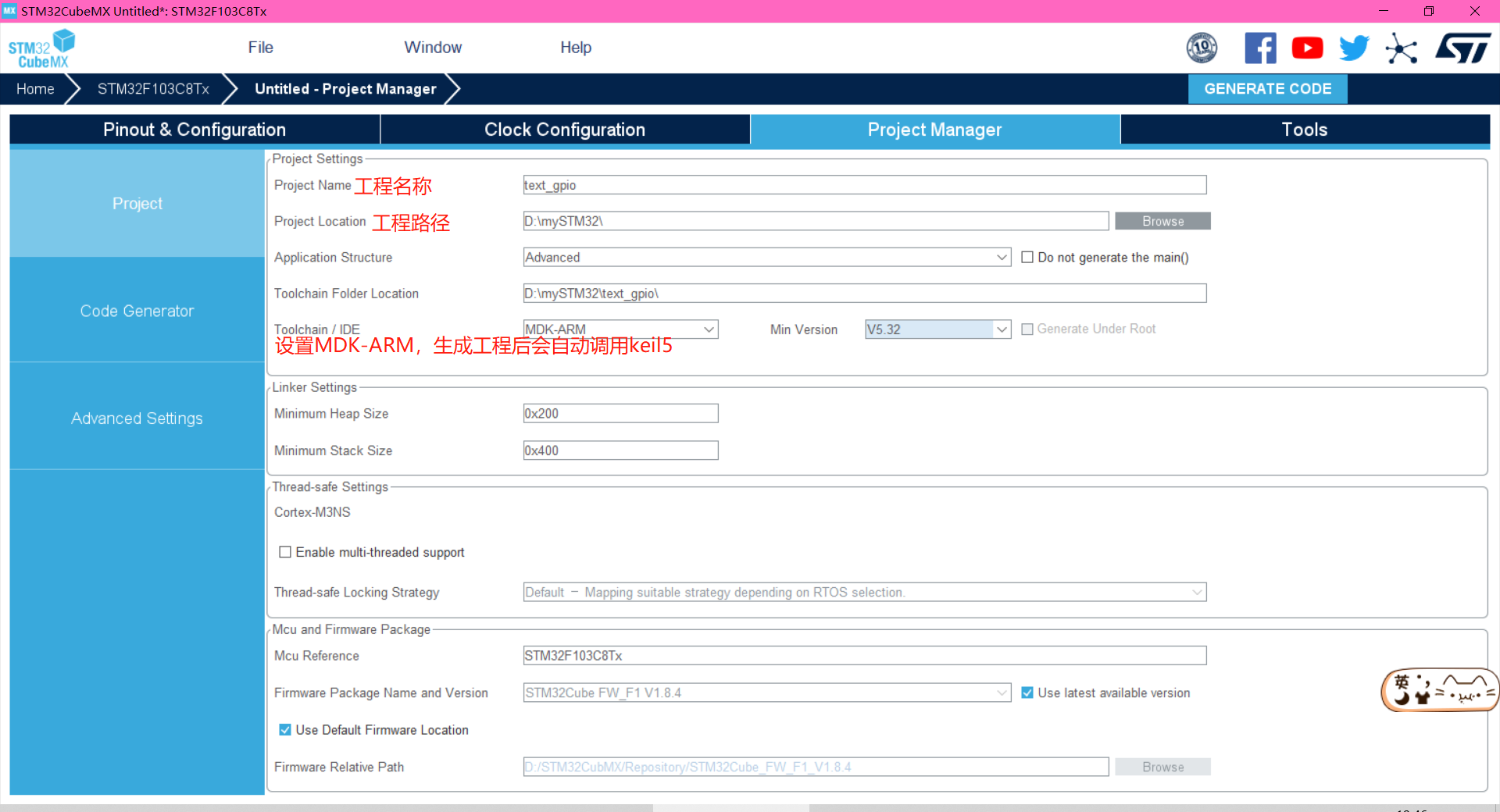
配置工程名称、工程路径
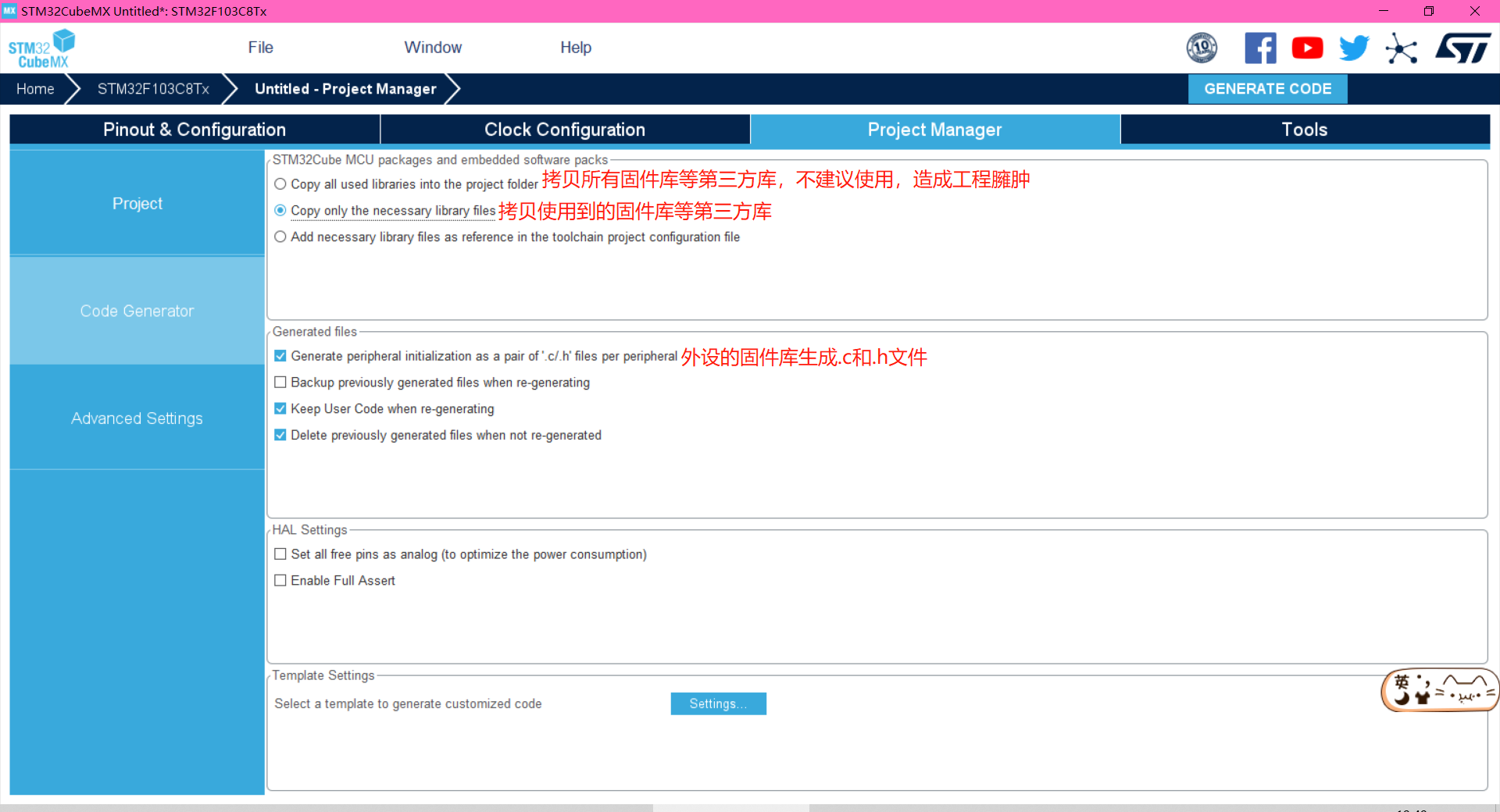
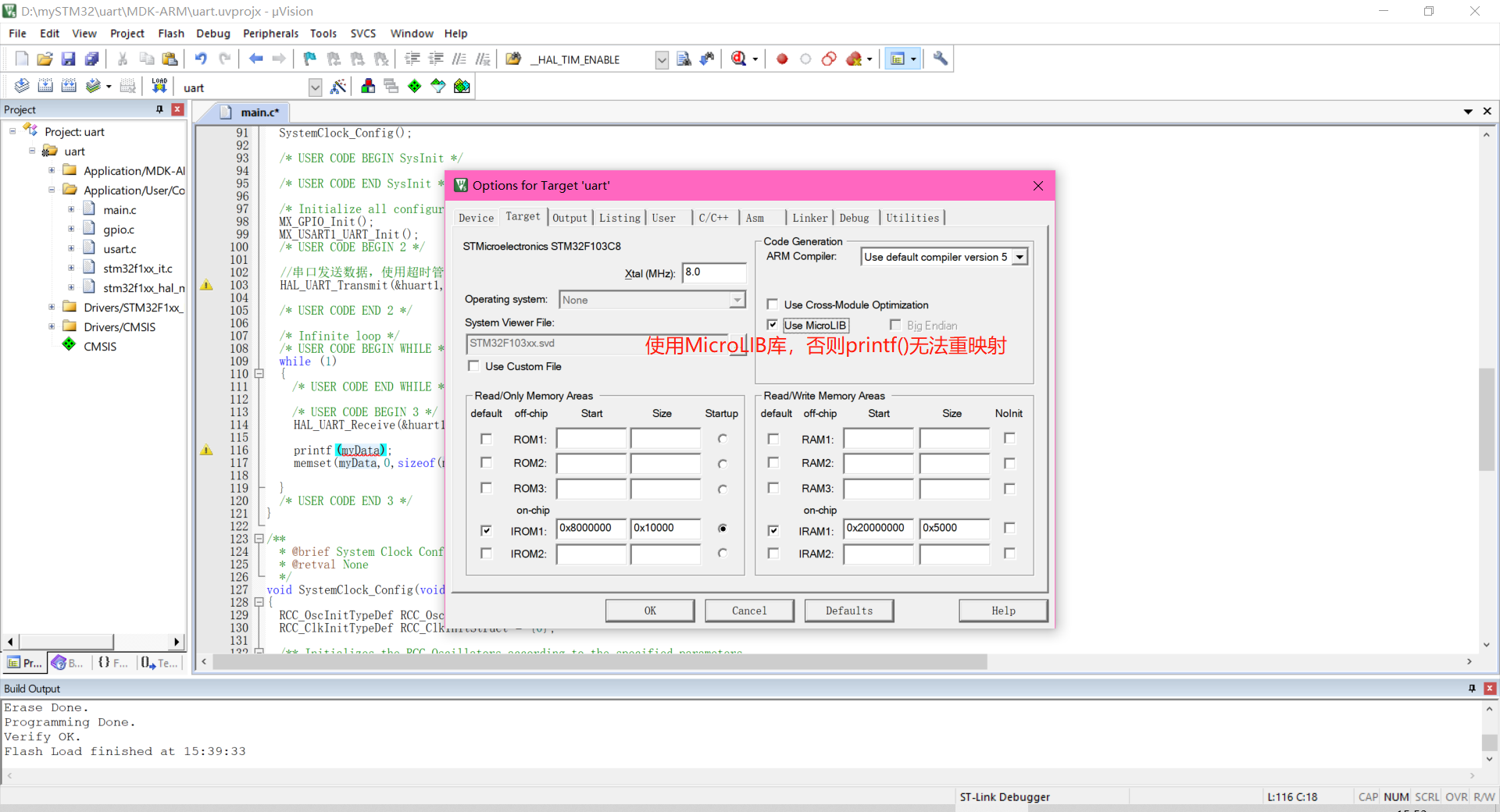
选择固件库
生成工程
使用MicroLIB库
main函数编写
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */#include <string.h>
#include <stdio.h>/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *///重写stdio.c文件中的prinft()里的fputc()函数
int fputc(int my_data,FILE *p)
{unsigned char temp = my_data;//改写后,使用printf()函数会将数据通过串口1发送出去HAL_UART_Transmit(&huart1,&temp,1,0xffff); //0xfffff为最大超时时间return my_data;
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */uint8_t myData[20] = {0};/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *///串口以阻塞的方式发送数据,超过时间后不再发送此次数据HAL_UART_Transmit(&huart1,(uint8_t *)"jiangxiaoya\n",strlen("jiangxiaoya\n"),100); //单片机复位后,会发送一个数据/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///串口以阻塞的方式接收数据,超过时间后不再接收此次数据HAL_UART_Receive(&huart1,myData,sizeof(myData) - 1,100); printf("%s\r\n",myData); //向串口发送数据memset(myData,0,sizeof(myData));}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
疑难点分析
改写stdio.c中的fputc()函数,以便能使用printf()向串口发送数据
//重写stdio.c文件中的prinft()里的fputc()函数
int fputc(int my_data,FILE *p)
{unsigned char temp = my_data;//改写后,使用printf()函数会将数据通过串口一发送出去HAL_UART_Transmit(&huart1,&temp,1,0xffff); //0xfffff为最大超时时间return my_data;
}串口之中断法
串口数据接收的状态标记变量
该变量可以自行命名,是一个uint16_t 类型的变量如uint16_t UART1_RX_STA = 0。串口每接收到一个数据时,该变量就自增1,当串口接收到回车(0x0d和0x0a),即串口的缓存数据全部接收完成,让该变量的bit16置1,表示数据全部接收完成。
uint16_t UART1_RX_STA | ||
bit 15 | bit 14 | bit 13~0 |
接收数据完成标志 | 接收0x0d标志 | 接收到有效数据个数标志 |
串口接收缓存和接收缓冲
接收缓存:存放串口每次接收的数据(uint8_t buf=0;)
接收缓冲:存放接收缓存(uint8_t UART1_RX_Buffer[USART_REC_LEN] = {'\0'}; )
串口每接收一个字节就会调用一次串口接收数据完成回调函数(HAL_UART_RxCpltCallback()),因此,需要在串口接收数据完成回调函数中对串口每一次接收的数据进行处理,即把数据存放到接收缓冲中。
STM32的hal库关于串口中断的函数
HAL_UART_Transmit_IT()
原型:HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
参数:
UART_HandleTypeDef *huart:串口句柄
uint8_t *pData:向串口发送的数据的地址
uint16_t Size:向串口发送的数据的大小
HAL_UART_Receive_IT()
原型:HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
参数:
UART_HandleTypeDef *huart:串口句柄
uint8_t *pData:从串口接收的数据的存放地址
uint16_t Size:从串口接收的数据的大小(留一个字符存放 '\0' )
HAL_UART_TxCpltCallback()
串口发送数据完成回调函数,也就是串口发送一个字节数据会产生执行该函数,该函数是一个虚函数,我们可以在main.c文件中完成它的函数体
原型:__weak void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
参数:
UART_HandleTypeDef *huart:串口句柄
HAL_UART_RxCpltCallback()
串口接收数据完成回调函数,也就是串口接收一个字节数据都会产生中断执行该函数,该函数是一个虚函数,我们可以在main.c文件中完成它的函数体
原型:__weak void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
参数:
UART_HandleTypeDef *huart:串口句柄
使用STM32CubeMX创建工程
配置SYS
配置RCC
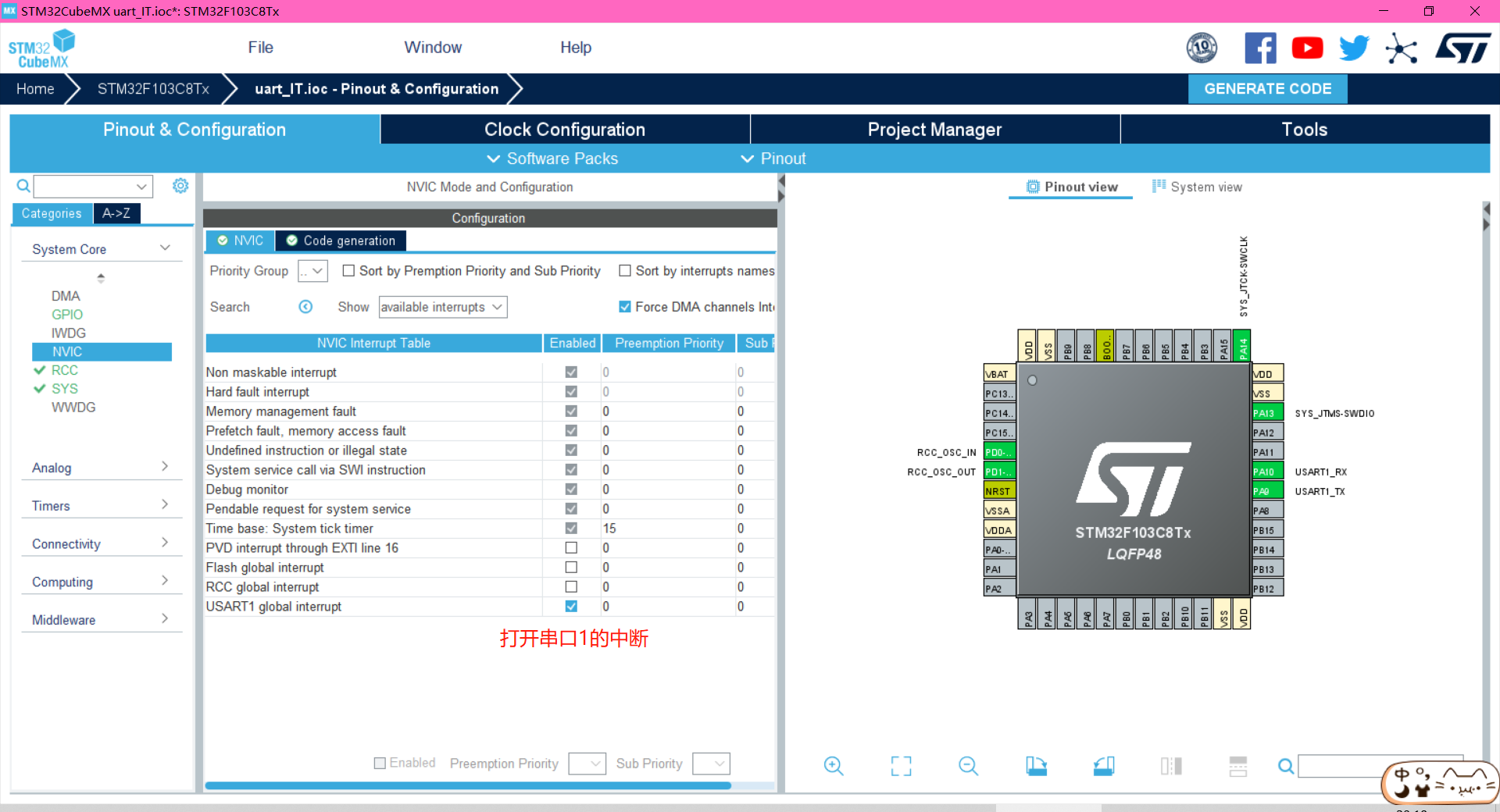
配置串口信息
配置NVIC
配置工程名称、工程路径
选择固件库
生成工程
main函数编写
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */#include <stdio.h>
#define USART_REC_LEN 200 //定义串口最大接收字符/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *///串口接收缓存(1字节)
uint8_t buf = 0;uint8_t UART1_RX_Buffer[USART_REC_LEN] = {'\0'}; //接收缓冲,串口接收的数据存放地点//串口接收状态,16位
uint16_t UART1_RX_STA = 0;
//bit15: 如果是1表示接收完成
//bit14: 如果是1表示接收到回车(0x0d)
//bit13~bit0: 接收到的有效字节数目/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *///串口接收回调函数,串口每接收到一个字节数据就会调用一次
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{static int cnt = 0;//判断中断是否串口1触发的if(huart->Instance == USART1){//判断串口的缓存数据是否全部接收完成,即判断UART1_RX_STA的bit15是否为1if(!(UART1_RX_STA & 0x8000)){ //如果没接收完成//判断是否接收到回车:0x0d + 0x0aif(UART1_RX_STA & 0x4000){ //如果接收到0x0d//判断是否接收到0x0aif(buf == 0x0a){ //如果接收到0x0a,即此时接收到回车UART1_RX_STA |= 0x8000; //串口的缓存数据全部接收完成}else{ //如果接收到0x0d没有接收到换行0x0acnt++;UART1_RX_STA = 0;//则认为此次接收错误,串口重新开始接收下一字节数据if(cnt == USART_REC_LEN){UART1_RX_STA |= 0xbfff; //如果收到0x0d后接收的100个字符内没有0x0a,就把UART1_RX_STA的bit14拉低,表示没有接收到0x0d}}}else{ //如果没有接收到回车0x0d//则判断收到的这个字符是否是回车0x0dif(buf == 0x0d){ //如果该字符是0x0dUART1_RX_STA |= 0x4000; //则将bit14拉高,表示接收到0x0d}else{ //如果不是0x0d//则将这个字符存放到缓存数组中UART1_RX_Buffer[UART1_RX_STA & 0x3ffff] = buf;UART1_RX_STA++;//如果接收的数据大于UART1_REC_LEN(200字节),则重新开始接收if(UART1_RX_STA > USART_REC_LEN - 1){UART1_RX_STA = 0;}}}}cnt = 0;HAL_UART_Receive_IT(&huart1, &buf, 1); //串口重新开启接收下一字节数据}
}//重写stdio.h文件中的prinft()里的fputc()函数
int fputc(int my_data,FILE *p)
{unsigned char temp = my_data;//改写后,使用printf()函数会将数据通过串口一发送出去HAL_UART_Transmit(&huart1,&temp,1,0xffff); //0xfffff为最大超时时间return my_data;
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *///开启接收中断HAL_UART_Receive_IT(&huart1,&buf,1); //开始接收串口的第一个字节,当接收到一个字节后就会产生中断进入接收回调函数/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///判断判断串口是否接收完成if(UART1_RX_STA & 0x8000){printf("接收完成\r\n");//将接收到的数据发送到串口HAL_UART_Transmit(&huart1,UART1_RX_Buffer,UART1_RX_STA & 0x3fff,0xffff);//等待发送完成while(huart1.gState != HAL_UART_STATE_READY);//换行,重新开始下一次接收printf("\r\n");UART1_RX_STA = 0;}//心跳包printf("haozigegie1\r\n");HAL_Delay(1000);}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
疑难点分析
fputc()函数分析
改写stdio.c中的fputc()函数,以便能使用printf()向串口发送数据
//重写stdio.c文件中的prinft()里的fputc()函数
int fputc(int my_data,FILE *p)
{unsigned char temp = my_data;//改写后,使用printf()函数会将数据通过串口一发送出去HAL_UART_Transmit(&huart1,&temp,1,0xffff); //0xfffff为最大超时时间return my_data;
}串口接收回调函数分析
当在main.c串口初始化后调用HAL_UART_Receive_IT()开始串口接收第一个字节数据,当接收到一个字节(即接收到接收缓存buf中)后就会产生中断进入接收回调函数对接收的数据进行处理
如果该字节不是0x0d或0x0a则存到接收缓冲中
如果该字节是0x0d,则串口数据接收的状态标记变量不再增加,等待接收到0x0a。
如果没有接收到0x0a则认为此次接收失败,则重新开始下一次接收。如果在接下来的100个字符内一直接收不到0x0a,则将UART1_RX_STA的bit14置0,表示没有接收到0x0d。
如果接收到了0x0a,则UART1_RX_STA的bit15置1表示数据全部接收完成,并等待该位被其他程序清除,重新开始下一次的串口接收。
如果迟迟没有接收到0x0d,那么在接收字节超过USART_REC_LEN时,摈弃前面的数据,重新开始接收数据。
//串口接收回调函数,串口每接收到一个字节数据就会调用一次
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{static int cnt = 0;//判断中断是否串口1触发的if(huart->Instance == USART1){//判断串口的缓存数据是否全部接收完成,即判断UART1_RX_STA的bit15是否为1if(!(UART1_RX_STA & 0x8000)){ //如果没接收完成//判断是否接收到回车:0x0d + 0x0aif(UART1_RX_STA & 0x4000){ //如果接收到0x0d//判断是否接收到0x0aif(buf == 0x0a){ //如果接收到0x0a,即此时接收到回车UART1_RX_STA |= 0x8000; //串口的缓存数据全部接收完成}else{ //如果接收到0x0d没有接收到换行0x0acnt++;UART1_RX_STA = 0;//则认为此次接收错误,串口重新开始接收下一字节数据if(cnt == USART_REC_LEN){UART1_RX_STA |= 0xbfff; //如果收到0x0d后接收的100个字符内没有0x0a,就把UART1_RX_STA的bit14拉低,表示没有接收到0x0d}}}else{ //如果没有接收到回车0x0d//则判断收到的这个字符是否是回车0x0dif(buf == 0x0d){ //如果该字符是0x0dUART1_RX_STA |= 0x4000; //则将bit14拉高,表示接收到0x0d}else{ //如果不是0x0d//则将这个字符存放到缓存数组中UART1_RX_Buffer[UART1_RX_STA & 0x3ffff] = buf;UART1_RX_STA++;//如果接收的数据大于UART1_REC_LEN(200字节),则重新开始接收if(UART1_RX_STA > USART_REC_LEN - 1){UART1_RX_STA = 0;}}}}cnt = 0;HAL_UART_Receive_IT(&huart1, &buf, 1); //串口重新开启接收下一字节数据}
}相关文章:
STM32之 串口
串口通信串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方 式的扩展接口。串行接口(Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简 单,只…...

CSDN 编程竞赛三十三期题解
竞赛总览 CSDN 编程竞赛三十三期题解:比赛详情 (csdn.net) 竞赛题解 题目1、奇偶排序 给定一个存放整数的数组,重新排列数组使得数组左边为奇数,右边为偶数(奇数和偶数的顺序根据输入的数字顺序排列)。 第七期竞赛…...
逆向练习之 mingyue.exe wp
目录 一.查壳 二.主函数 三.operate函数 四.storage函数及4618和4620指针功能的解释 五.judge函数 六.求解flag 七.其他--ida字符识别问题 一.查壳 64位无壳 二.主函数 1.这里的pointer_4618和4620是两个相邻的八字节内存单元,其中4620是字符串链表表头head 2.puts和s…...

LeetCode 热题 HOT 100 Java 题解 -- Part 3
练习地址 Part 1 : https://blog.csdn.net/qq_41080854/article/details/128829494 Part 2 : https://blog.csdn.net/qq_41080854/article/details/129278336 LeetCode 热题 HOT 100 Java 题解 -- Part 376. 最佳买卖股票时机含冷冻期77. 戳气球78. 零钱兑换79. 打家劫舍 III…...

QML键盘事件
在QML中,当有一个按键按下或释放时,会产生一个键盘事件,将其传递给获得有焦点的QML项目(讲focus属性设置为true,则获得焦点)。 按键处理的基本流程: Qt接收密钥操作并生成密钥事件。如果 QQuic…...

跨域问题怎么解决
解决跨域,原因:域名不同,域名相同端口不同;二级域名不同 什么是跨域? 就是两个项目之间通讯,如果访问的域名与ajax访问的地址不一致情况,默认情况浏览器有一个安全机制。 postman不一定能测试…...

微服务网关Gateway和Zuul的区别
spring-cloud-Gateway是spring-cloud的一个子项目。而zuul则是netflix公司的项目,只是spring将zuul集成在spring-cloud中使用而已。 因为zuul2.0连续跳票和zuul1的性能表现不是很理想,所以催生了spring团队开发了Gateway项目。 Zuul: 使用的…...
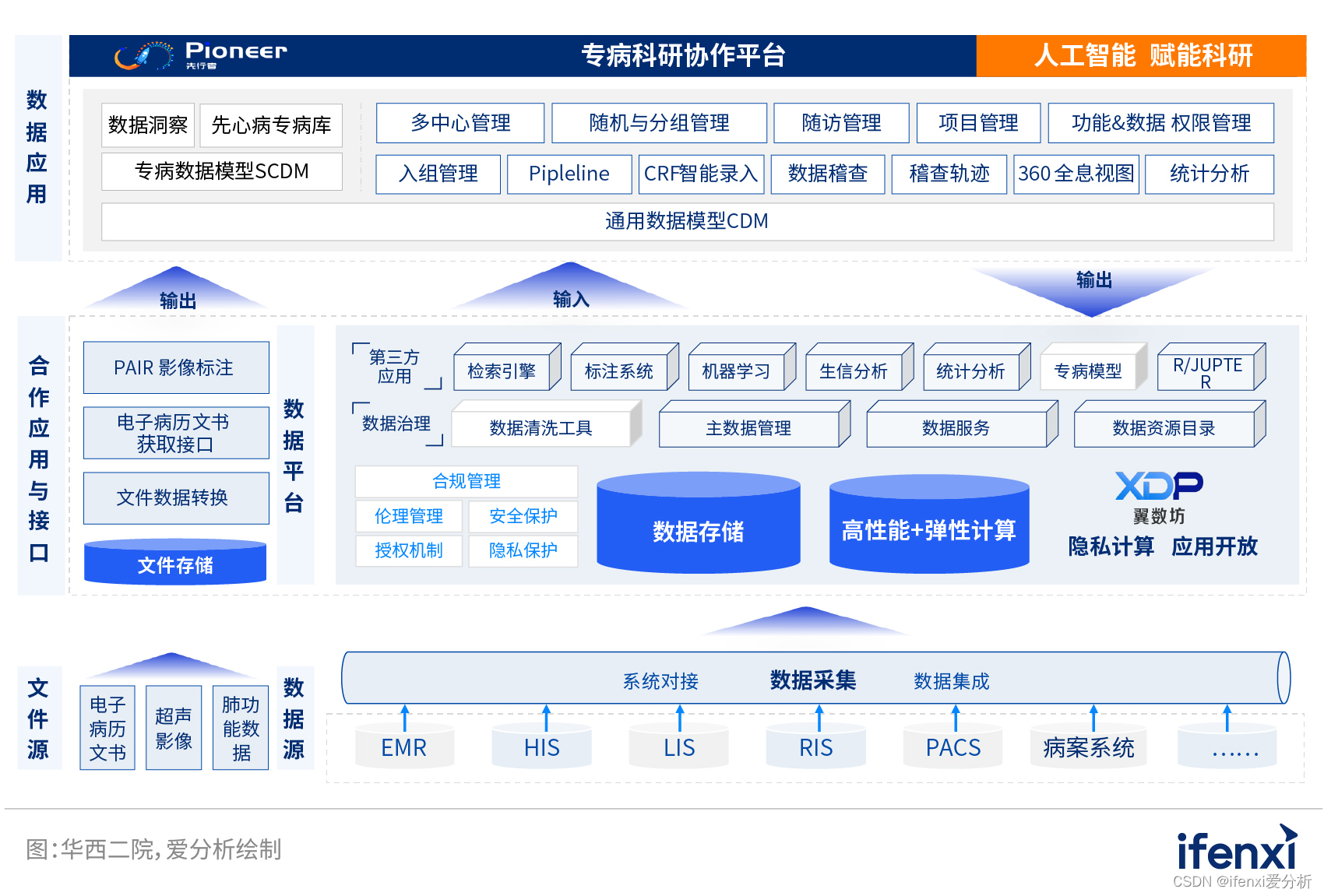
专访华西二院吴邦华:隐私计算+AI全栈技术,构筑智慧医院建设的坚实数据底座|爱分析访谈
从IT时代步入DT时代,医疗大数据成为智慧医院建设的重要驱动力。经过多年信息化系统建设,很多医院已经积累了大量的医疗数据资源,但由于各业务系统间数据孤岛化严重、系统架构落后、数据缺乏深度治理等问题存在,导致现有数据深度及…...
)
《C++ Primer Plus》第18章:探讨 C++ 新标准(6)
可变参数模板 可变参数模板(variadic template)让您能够创建这样的模板函数和模板类,即可接收可变数量的参数。这里介绍可变参数模板函数。例如,假设要编写一个函数,它可接受任意数量的参数,参数的类型只需…...

.Net Core中使用是SQL Server的邮件发送功能
.Net Core中使用是sqlserver的邮件发送功能准备需求启用SQL Server的电子邮件功能检查和测试在.net Core中调用在sqlsrver的管理中有一个数据库邮件功能,再此可以使用sqlserver来自动发送一些邮件,但是有一些需要插入附件的邮件则需要使用程序代码来解决,下面就是使用C#来调用s…...

Nginx优化服务和防盗链
Nginx优化服务和防盗链一、长连接1、修改主配置文件2、测试3、在主配置文件添加4、验证二、Nginx第三方模块1、开源的echo模块2、查看是否成功3、加echo模块步骤4、网页测试验证三、搭建虚拟主机1、编译安装好nginx后,对主配置文件进行修改2、创建文件3、验证四、防…...

B树与B+树
认识了解MySQL中的B树B树引出什么是B树什么是B树B树的优点B树引出 在MySQL中,如果我们设置了主键, 那么对于该列表中的数据就有了一个索引,插入表中数据的主键值不能重复,而且不能为空. 那当我们插入数据的时候, 它是如何通过索引来判断主键值是否重复的呢? 我们想到它肯定是…...

QEMU网络配置
文章目录1. 前言2. 测试环境3. 配置步骤3.1 host 配置3.1.1 检查 host 对 TUN/TAP 和 网桥的支持情况3.1.2 网桥一端的建立:创建网桥设备,并添加 host 网卡到网桥3.1.3 网桥另一端的建立:TUN/TAP 配置3.2 guest 端的配置4. 参考链接1. 前言 …...
windows安装tomcat
这里写自定义目录标题tomcat官网下载安装包并解压环境变量配置启动tomcat访问http://localhost:8080/修复启动出现乱码问题tomcat官网下载安装包并解压 环境变量配置 系统环境变量新增: 变量名:CATALINA_HOME 变量值:tomcat的安装目录 编辑…...

刷题记录:牛客NC23051华华和月月种树 树链剖分+离线加点
传送门:牛客 题目描述: 华华看书了解到,一起玩养成类的游戏有助于两人培养感情。所以他决定和月月一起种一棵树。因为华华现在也是信息学高手了,所以他们种的树是信息学意义下的。 华华和月月一起维护了一棵动态有根树,每个点有一个权值。刚…...

年薪20W软件测试工程师必备的6大技能(建议收藏)
软件测试 随着软件开发行业的日益发展,岗位需求量和行业薪资都不断增长,想要入行的人也是越来越多,但不知道从哪里下手,今天,就给大家分享一下,软件测试行业都有哪些必会的方法和技术知识点,作…...
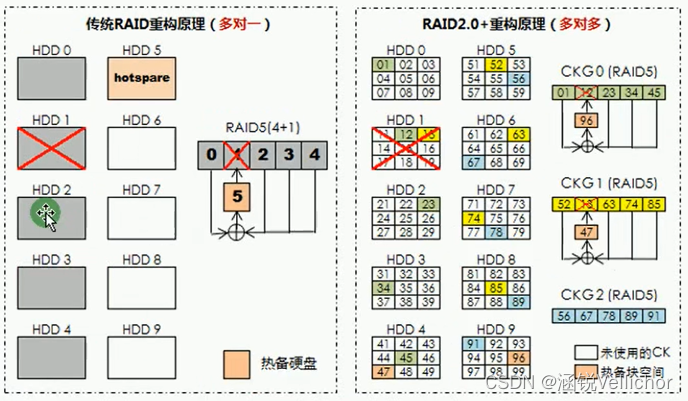
【存储】RAID2.0+、多路径技术、磁盘可靠性技术
RAID2.0RAID 2.0技术RAID技术发展RAID 2.0软件逻辑对象RAID 2.0基本原理硬盘域Storage Pool & TierDisk Group(DG)LD(逻辑磁盘)Chunk(CK)Chunk Group(CKG)ExtentGrainVolume &am…...

Vue 2
文章目录1. 简介2. 第一个Vue程序3. 指令3.1 判断循环3.2 操作属性3.3 绑定事件3.4 表单中数据双向绑定3.5 其他内置指令3.6 自定义指令4. 组件4.1 全局注册4.2 局部注册4.3 组件通讯4.4 单文件组件5. 组件插槽5.1 单个插槽5.2 具名插槽5.3 作用域插槽6. 内置组件6.1 component…...

Ubuntu 安装 Docker Engine
【参考】Install Docker Engine on Ubuntu | Docker Documentation: https://docs.docker.com/engine/install/ubuntu/ 【参考】Docker CE 镜像源站-阿里云开发者社区 https://developer.aliyun.com/article/110806 【规范】模仿 Docker 文档,Ubuntu, Docker 首字母…...
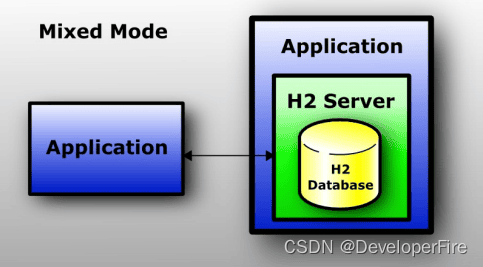
SpringBoot入门 - 添加内存数据库H2
上文我们展示了通过学习经典的MVC分包结构展示了一个用户的增删查改项目,但是我们没有接入数据库;本文将在上文的基础上,增加一个H2内存数据库,并且通过Spring 提供的数据访问包JPA进行数据查询。准备知识点在介绍通过Spring JPA接…...

OpenClaw模型微调:gemma-3-12b-it针对自动化任务的专项优化
OpenClaw模型微调:gemma-3-12b-it针对自动化任务的专项优化 1. 为什么需要专项优化? 当我第一次将OpenClaw接入gemma-3-12b-it模型时,发现了一个有趣的现象:这个号称"指令优化"的模型在处理简单问答时表现优异&#x…...
 与 Self-Correction(自我修正) 能力的企业级 Agent)
构建具备 Cyclic Loop(循环反思) 与 Self-Correction(自我修正) 能力的企业级 Agent
摘要:当"降本增效"成为常态,企业知识流失的速度远超你的想象。本文将不再停留在简单的 RAG demo 层面,而是深入 LangGraph 的底层架构,带你从零构建一个具备 Cyclic Loop(循环反思) 与 Self-Corr…...

告别数据孤岛:手把手教你用ArcMap的Join功能,把Excel数据精准‘贴’到地图上
数据可视化实战:用ArcMap的Join功能将Excel业务数据转化为空间洞察 在商业分析和区域规划中,最令人头疼的莫过于面对一堆冰冷的Excel数字却无法直观看到它们在地理空间上的分布规律。想象一下,当销售总监拿到全国各城市的业绩报表时ÿ…...

Claude Code 接入 DeepSeek、GLM、MiniMax 等国产大模型,保姆级教程!
每天免费领 1亿 Token,白嫖DeepSeek、GLM、MiniMax、Kimi等大模型! 这份指南是专门为那些“只想赶紧上手开干”的朋友准备的。 咱们不整那些虚头巴脑的理论,直接帮你搞定这几件事: 怎么把 Claude Code 装好如何确定它已经能跑通…...

新手怎么部署OpenClaw?2026年本地1分钟超速搭建OpenClaw及大模型百炼APIKey配置
新手怎么部署OpenClaw?2026年本地1分钟超速搭建OpenClaw及大模型百炼APIKey配置。OpenClaw(原Clawdbot)作为2026年主流的AI自动化助理平台,可通过阿里云轻量服务器实现724小时稳定运行,并快速接入钉钉,让AI…...

YimMenu:重新定义GTA V游戏体验的全功能增强套件
YimMenu:重新定义GTA V游戏体验的全功能增强套件 【免费下载链接】YimMenu YimMenu, a GTA V menu protecting against a wide ranges of the public crashes and improving the overall experience. 项目地址: https://gitcode.com/GitHub_Trending/yi/YimMenu …...

Kubernetes集群的监控与告警方案
Kubernetes集群的监控与告警方案 引言:监控与告警的重要性 哥们,别整那些花里胡哨的!作为一个前端开发兼摇滚鼓手,我最烦的就是系统出问题还不知道。在云原生时代,Kubernetes集群的监控与告警是确保系统稳定运行的关…...

Node.js——dns模块
dns模块1、resolve方法将域名解析为DNS记录2、lookup方法查询IP地址3、reverse方法反向解析IP地址4、dns模块中的各种错误代码在网络编程中,开发者更倾向于使用域名,而不是IP地址来指定网络连接的目标地址。在Node.js中,提供dns模块ÿ…...

Scratch 3.0二次开发实战:从零构建自定义插件
1. 为什么需要自定义Scratch插件? Scratch作为全球最受欢迎的少儿编程工具,其模块化积木设计让编程学习变得直观有趣。但你可能遇到过这种情况:想做一个天气预报项目,却发现内置积木无法获取实时天气数据;或者想开发一…...

Ghidra逆向工程平台:探索二进制世界的开源利器
Ghidra逆向工程平台:探索二进制世界的开源利器 【免费下载链接】ghidra_installer Helper scripts to set up OpenJDK 11 and scale Ghidra for 4K on Ubuntu 18.04 / 18.10 项目地址: https://gitcode.com/gh_mirrors/gh/ghidra_installer 在当今数字化时代…...