基于深度学习的停车位关键点检测系统(代码+原理)
摘要:
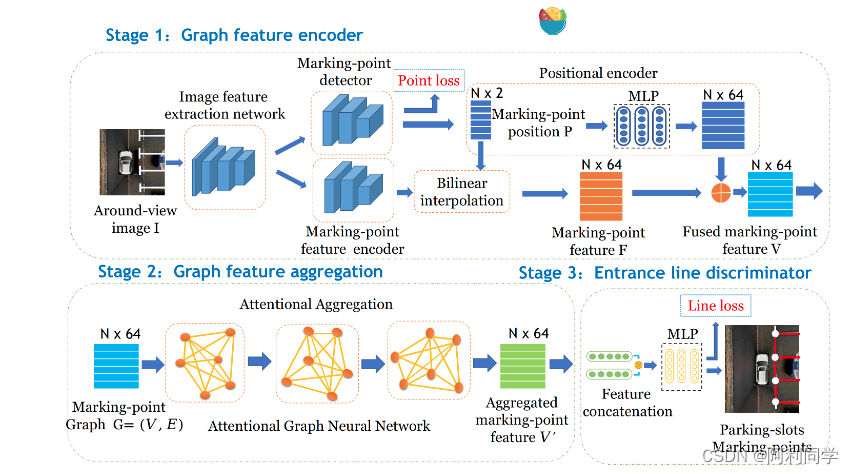
DMPR-PS是一种基于深度学习的停车位检测系统,旨在实时监测和识别停车场中的停车位。该系统利用图像处理和分析技术,通过摄像头获取停车场的实时图像,并自动检测停车位的位置和状态。本文详细介绍了DMPR-PS系统的算法原理、创新点和实验结果,并对其性能进行了评估。

算法创新:
DMPR-PS系统的算法创新主要体现在以下几个方面:
-
深度学习模型:DMPR-PS系统采用了深度学习模型来进行停车位的检测。通过大规模数据集的训练,该模型可以自动学习停车位的特征,并准确地进行检测和分类。
-
多尺度检测:为了应对不同大小的停车位,DMPR-PS系统使用了多尺度检测策略。通过在不同尺度下进行检测,可以提高系统对各种大小停车位的检测准确率。
-
实时性能:DMPR-PS系统具有较高的实时性能。它能够快速处理实时视频流,并在短时间内完成停车位的检测和识别,满足实时监测的需求。

实验结果与结论:
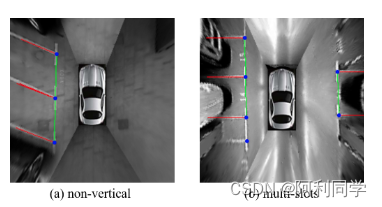
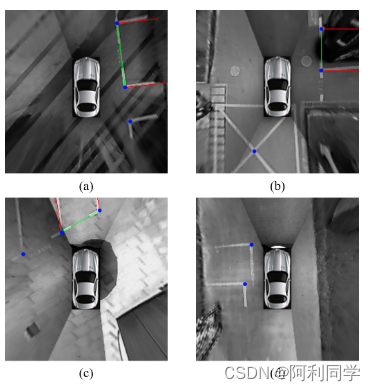
通过对多个停车场场景的实验测试,DMPR-PS系统展现了良好的性能。实验结果表明,该系统在检测准确率和实时性能方面都具有较高的水平。
、
代码运行
要求:
python版本3.6pytorch版本1.4+
其他要求:
pip install -r requirements.txt
gcn-parking-slot
预训练模型
可以通过以下链接下载两个预训练模型。
链接 代码 描述
Model0 bc0a 使用ps2.0子集进行训练,如[1]所述。
Model1 pgig 使用完整的ps2.0数据集进行训练。
准备数据
可以在此处找到原始的ps2.0数据和标签。提取并组织如下:
├── datasets
│ └── parking_slot
│ ├── annotations
│ ├── ps_json_label
│ ├── testing
│ └── training
训练和测试
将当前目录导出到PYTHONPATH:
export PYTHONPATH=`pwd`
演示
python3 tools/demo.py -c config/ps_gat.yaml -m cache/ps_gat/100/models/checkpoint_epoch_200.pth
训练
python3 tools/train.py -c config/ps_gat.yaml
测试
python3 tools/test.py -c config/ps_gat.yaml -m cache/ps_gat/100/models/checkpoint_epoch_200.pth
代码
import cv2
import time
import torch
import pprint
import numpy as np
from pathlib import Pathfrom psdet.utils.config import get_config
from psdet.utils.common import get_logger
from psdet.models.builder import build_modeldef draw_parking_slot(image, pred_dicts):slots_pred = pred_dicts['slots_pred']width = 512height = 512VSLOT_MIN_DIST = 0.044771278151623496VSLOT_MAX_DIST = 0.1099427457599304HSLOT_MIN_DIST = 0.15057789144568634HSLOT_MAX_DIST = 0.44449496544202816SHORT_SEPARATOR_LENGTH = 0.199519231LONG_SEPARATOR_LENGTH = 0.46875junctions = []for j in range(len(slots_pred[0])):position = slots_pred[0][j][1]p0_x = width * position[0] - 0.5p0_y = height * position[1] - 0.5p1_x = width * position[2] - 0.5p1_y = height * position[3] - 0.5vec = np.array([p1_x - p0_x, p1_y - p0_y])vec = vec / np.linalg.norm(vec)distance =( position[0] - position[2] )**2 + ( position[1] - position[3] )**2 if VSLOT_MIN_DIST <= distance <= VSLOT_MAX_DIST:separating_length = LONG_SEPARATOR_LENGTHelse:separating_length = SHORT_SEPARATOR_LENGTHp2_x = p0_x + height * separating_length * vec[1]p2_y = p0_y - width * separating_length * vec[0]p3_x = p1_x + height * separating_length * vec[1]p3_y = p1_y - width * separating_length * vec[0]p0_x = int(round(p0_x))p0_y = int(round(p0_y))p1_x = int(round(p1_x))p1_y = int(round(p1_y))p2_x = int(round(p2_x))p2_y = int(round(p2_y))p3_x = int(round(p3_x))p3_y = int(round(p3_y))cv2.line(image, (p0_x, p0_y), (p1_x, p1_y), (255, 0, 0), 2)cv2.line(image, (p0_x, p0_y), (p2_x, p2_y), (255, 0, 0), 2)cv2.line(image, (p1_x, p1_y), (p3_x, p3_y), (255, 0, 0), 2)#cv2.circle(image, (p0_x, p0_y), 3, (0, 0, 255), 4)junctions.append((p0_x, p0_y))junctions.append((p1_x, p1_y))for junction in junctions:cv2.circle(image, junction, 3, (0, 0, 255), 4)return imagedef main():cfg = get_config()logger = get_logger(cfg.log_dir, cfg.tag)logger.info(pprint.pformat(cfg))model = build_model(cfg.model)logger.info(model)image_dir = Path(cfg.data_root) / 'testing' / 'outdoor-normal daylight'display = False# load checkpointmodel.load_params_from_file(filename=cfg.ckpt, logger=logger, to_cpu=False)model.cuda()model.eval()if display:car = cv2.imread('images/car.png')car = cv2.resize(car, (512, 512))with torch.no_grad():for img_path in image_dir.glob('*.jpg'):img_name = img_path.stemdata_dict = {} image = cv2.imread(str(img_path))image0 = cv2.resize(image, (512, 512))image = image0/255.data_dict['image'] = torch.from_numpy(image).float().permute(2, 0, 1).unsqueeze(0).cuda()start_time = time.time()pred_dicts, ret_dict = model(data_dict)sec_per_example = (time.time() - start_time)print('Info speed: %.4f second per example.' % sec_per_example)if display:image = draw_parking_slot(image0, pred_dicts)image[145:365, 210:300] = 0image += carcv2.imshow('image',image.astype(np.uint8))cv2.waitKey(50)save_dir = Path(cfg.output_dir) / 'predictions'save_dir.mkdir(parents=True, exist_ok=True)save_path = save_dir / ('%s.jpg' % img_name)cv2.imwrite(str(save_path), image)if display:cv2.destroyAllWindows()if __name__ == '__main__':main()
结论
DMPR-PS系统是一种基于深度学习的停车位检测系统,通过创新的算法设计和实时性能优化,可以有效地监测和识别停车场中的停车位。该系统在提高停车场资源利用率和管理效率方面具有重要的应用价值。
相关文章:
基于深度学习的停车位关键点检测系统(代码+原理)
摘要: DMPR-PS是一种基于深度学习的停车位检测系统,旨在实时监测和识别停车场中的停车位。该系统利用图像处理和分析技术,通过摄像头获取停车场的实时图像,并自动检测停车位的位置和状态。本文详细介绍了DMPR-PS系统的算法原理、…...
C#,入门教程(09)——运算符的基础知识
上一篇: C#,入门教程(08)——基本数据类型及使用的基础知识https://blog.csdn.net/beijinghorn/article/details/123906998 一、算术运算符号 算术运算符号包括:四则运算 加 , 减-, 乘*, 除/与取模%。 // 加法,运算 int va 1 …...
企业出海数据合规:GDPR中的个人数据与非个人数据之区分
GDPR仅适用于个人数据,这意味着非个人数据不在其适用范围内。因此,个人数据的定义是一个至关重要的因素,因为它决定了处理数据的实体是否要遵守该法规对数据控制者规定的各种义务。尽管如此,什么是个人数据仍然是当前数据保护制度…...

如何在Ubuntu搭建Emlog博客站点并发布至公网可随时远程访问管理界面——“cpolar内网穿透”
文章目录 前言1. 网站搭建1.1 Emolog网页下载和安装1.2 网页测试1.3 cpolar的安装和注册 2. 本地网页发布2.1 Cpolar临时数据隧道2.2.Cpolar稳定隧道(云端设置)2.3.Cpolar稳定隧道(本地设置) 3. 公网访问测试总结 前言 博客作为使…...
【金猿CIO展】是石科技CIO侯建业:算力产业赋能,促进数字经济建设
侯建业 本文由是石科技CIO侯建业撰写并投递参与“数据猿年度金猿策划活动——2023大数据产业年度优秀CIO榜单及奖项”评选。 大数据产业创新服务媒体 ——聚焦数据 改变商业 是石科技(江苏)有限公司成立于2021年,由国家超级计算无锡中心与…...

TypeScript 类
目录 1、实例 2、创建类的数据成员 3、创建实例化对象 4、完整实例 5、类的继承 6、继承类的方法重写 7、static关键字 8、instanceof运算符 9、访问控制修饰符 10、类和接口 TypeScript 是面向对象的 JavaScript。类描述了所创建的对象共同的属性和方法。支持面向对…...
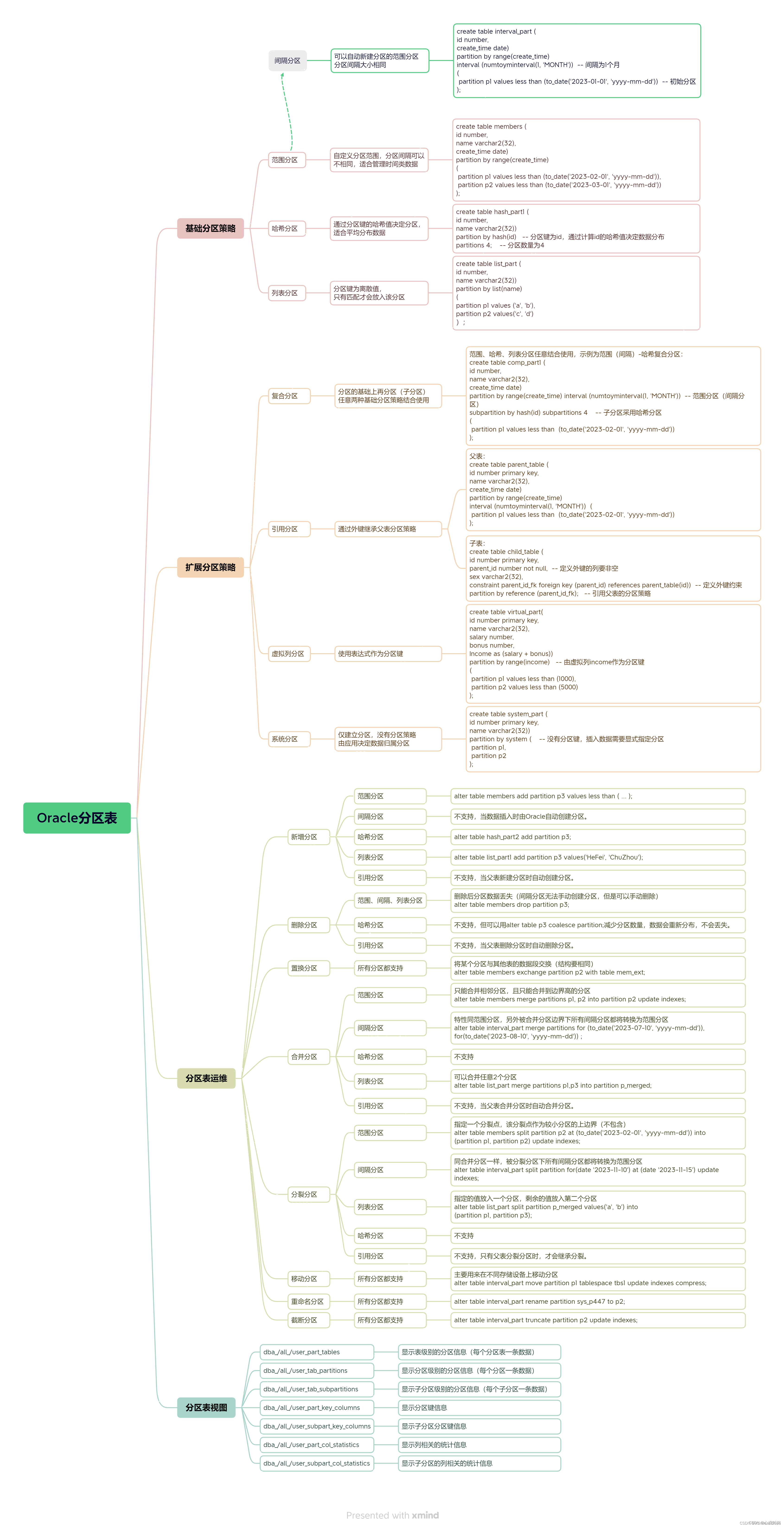
Oracle分区表
文章目录 A. varchar2类型时间字段(20240102)分区实战1. 表要不要分区2. 将已经存在的表改造为分区表(时间字段,varchar2类型)3. 增加分区3.1 增加分区3.2 置换分区,不会复制索引,不要用这种语法建表,这是专门为置换分区用的3.3 分…...
【leetcode】力扣算法之旋转图像【难度中等】
题目描述 给定一个 n n 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。 你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。请不要 使用另一个矩阵来旋转图像。 用例 输入: matrix [[1,2,3],[4,5,6],[7,8,9]] 输出&…...

【Java集合类篇】HashMap的数据结构是怎样的?
HashMap的数据结构是怎样的? ✔️HashMap的数据结构✔️ 数组✔️ 链表 ✔️HashMap的数据结构 在Java中,保存数据有两种比较简单的数据结构: 数组和链表(或红黑树)。 HashMap是 Java 中常用的数据结构,它实现了 Map 接口。Has…...
:摸石头过河 | 京东云技术团队)
Spring 应用合并之路(一):摸石头过河 | 京东云技术团队
公司在推进降本增效,在尝试多种手段之后,发现应用太多,每个应用都做跨机房容灾部署,则最少需要 4 台机器(称为容器更合适)。那么,将相近应用做一个合并,减少维护项目,提高…...

Android13配置selinux让system应用可读sys,proc,SN号
system权限应用读sys,proc目录及SN号 Android13预置的system应用,需要读/sys, /proc目录,读(SN)serial number号, 需要修改selinux配置,否则会报avc错. 其修改方法会比Android11复杂一些. 实现 system_app.te中添加…...

防勒索病毒攻击的关键措施
【作者】朱向东 中原银行 高级工程师 在当今数字化时代,勒索病毒成为了企业和个人面临的一项严峻威胁。勒索病毒攻击可以导致数据丢失、系统瘫痪以及经济损失。为了保护自己和组织的利益,采取一系列的防范措施是至关重要的。下面是一些关键的措施&#…...

代表团坐车 - 华为OD统一考试
OD统一考试(B卷) 分值: 100分 题解: Java / Python / C++ 题目描述 某组织举行会议,来了多个代表团同时到达,接待处只有一辆汽车可以同时接待多个代表团,为了提高车辆利用率,请帮接待员计算可以坐满车的接待方案输出方案数量。 约束: 一个团只能上一辆车,并且代表团…...
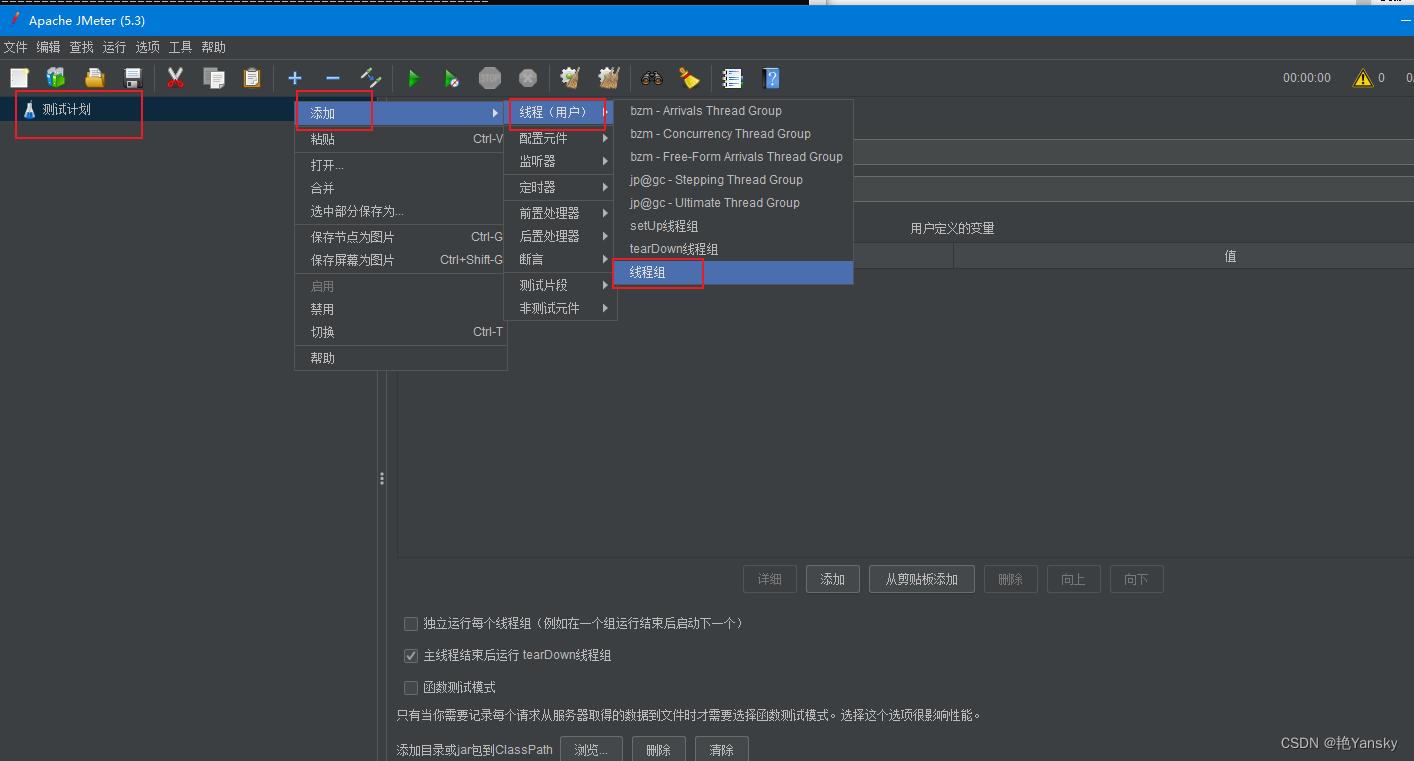
运用Jmeter进行登录测试
开始了解Jmeter,写篇关于Jmeter的博客做备忘,这里以苏宁易购网站的登录请求为例实战来说明测试计划元件,创建一个 Web 测试计划。 今天简单介绍Jemeter的入门,Jmeter 的安装这边就跳过,直接讲述如何使用JMETER,如何运用Jmeter进行测试。 a.下载jmeter软件 b.安装…...
Docker学习与应用(四)-容器数据卷
1、容器数据卷 1)什么是容器数据卷 docker的理念回顾 将应用和环境打包成一个镜像! 数据?如果数据都在容器中,那么我们容器删除,数据就会丢失!需求:数据可以持久化 MySQL,容器删…...

CentOS 7.6下HTTP隧道代理的安全性考虑
在CentOS 7.6上配置HTTP隧道代理时,安全性是一个不可忽视的重要因素。以下是对HTTP隧道代理安全性的一些关键考虑因素: 1. 加密和数据安全 使用强加密算法:确保您使用的是经过广泛认可和强化的加密算法,如AES-256-GCM。数据完整…...

Mockito+junit5搞定单元测试
目录 一、简介1.1 单元测试的特点1.2 Mock类框架的使用场景1.3 常见的Mock框架1.3.1 Mockito1.3.2 EasyMock1.3.3 PowerMock1.3.4 Testable1.3.5 比较 二、Mockito的使用2.1 导入pom文件2.2 mock对象和spy对象2.3 初始化mock/spy对象的方式2.4 参数匹配2.5 方法插桩2.6 InjectM…...

PostgreSQL获取当天、昨天、本月、上个月、本年、去年的数据
gps_time为timestamp类型日期字段 获取当天的数据 WHERE DATE_TRUNC(day, gps_time) CURRENT_DATE --或 WHERE DATE(gps_time) CURRENT_DATE获取昨天的数据 WHERE DATE_TRUNC(day, gps_time) CURRENT_DATE - INTERVAL 1 day获取本月的数据 WHERE DATE_TRUNC(month, gps_…...
XCTF:stage1[WriteUP]
从题目中下载到图片: 考虑图片是png,隐写方式有可能是高宽修改,也可能是色相隐藏,色彩通道位隐藏等等 使用stegsolve对图片进行一下伽马、颜色转换 在图片的左上角就显示出了一个二维码 使用QR_Rresearch工具对二维码扫描 获得一…...

STM32CubeMX教程13 ADC - 单通道转换
目录 1、准备材料 2、实验目标 3、ADC概述 4、实验流程 4.0、前提知识 4.1、CubeMX相关配置 4.1.1、时钟树配置 4.1.2、外设参数配置 4.1.3、外设中断配置 4.2、生成代码 4.2.1、外设初始化调用流程 4.2.2、外设中断调用流程 4.2.3、添加其他必要代码 5、常用函数…...
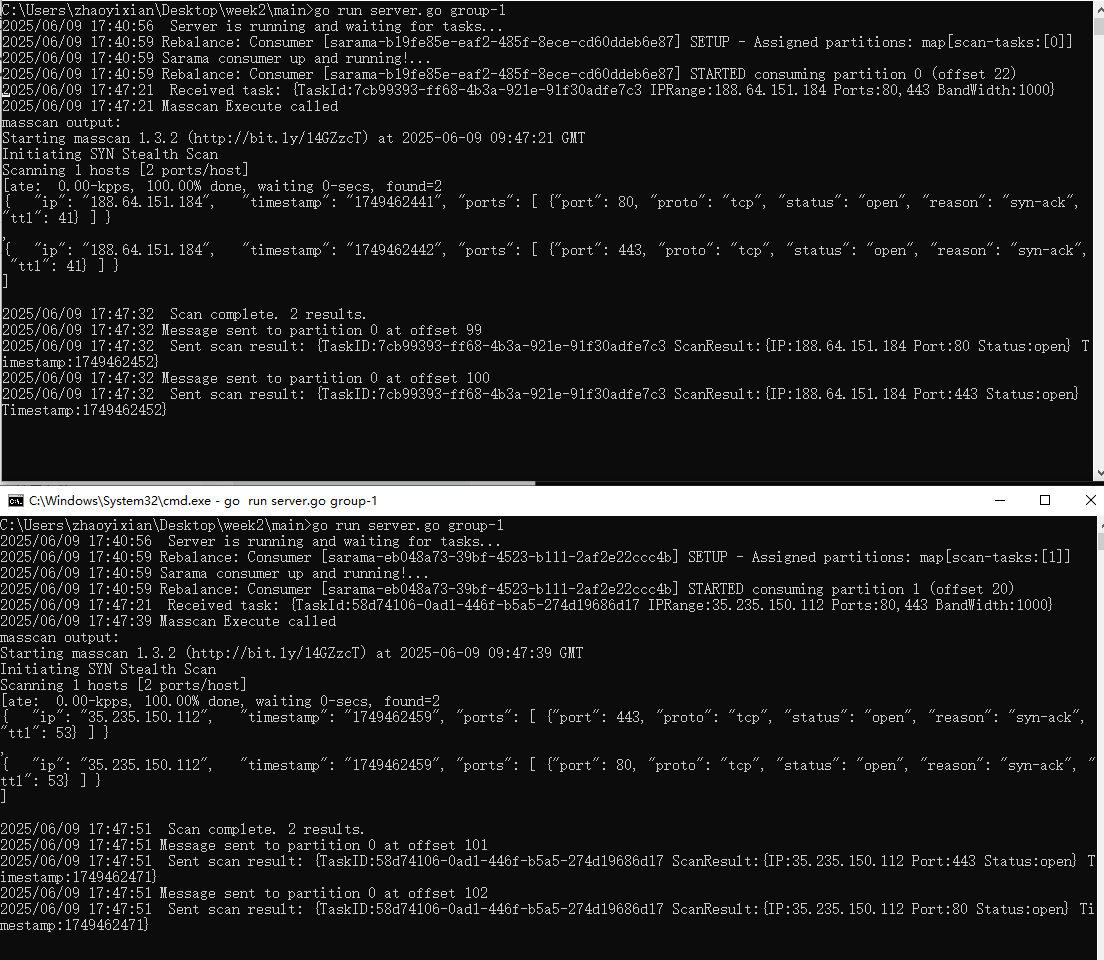
【kafka】Golang实现分布式Masscan任务调度系统
要求: 输出两个程序,一个命令行程序(命令行参数用flag)和一个服务端程序。 命令行程序支持通过命令行参数配置下发IP或IP段、端口、扫描带宽,然后将消息推送到kafka里面。 服务端程序: 从kafka消费者接收…...

Nginx server_name 配置说明
Nginx 是一个高性能的反向代理和负载均衡服务器,其核心配置之一是 server 块中的 server_name 指令。server_name 决定了 Nginx 如何根据客户端请求的 Host 头匹配对应的虚拟主机(Virtual Host)。 1. 简介 Nginx 使用 server_name 指令来确定…...
)
Android第十三次面试总结(四大 组件基础)
Activity生命周期和四大启动模式详解 一、Activity 生命周期 Activity 的生命周期由一系列回调方法组成,用于管理其创建、可见性、焦点和销毁过程。以下是核心方法及其调用时机: onCreate() 调用时机:Activity 首次创建时调用。…...

python报错No module named ‘tensorflow.keras‘
是由于不同版本的tensorflow下的keras所在的路径不同,结合所安装的tensorflow的目录结构修改from语句即可。 原语句: from tensorflow.keras.layers import Conv1D, MaxPooling1D, LSTM, Dense 修改后: from tensorflow.python.keras.lay…...
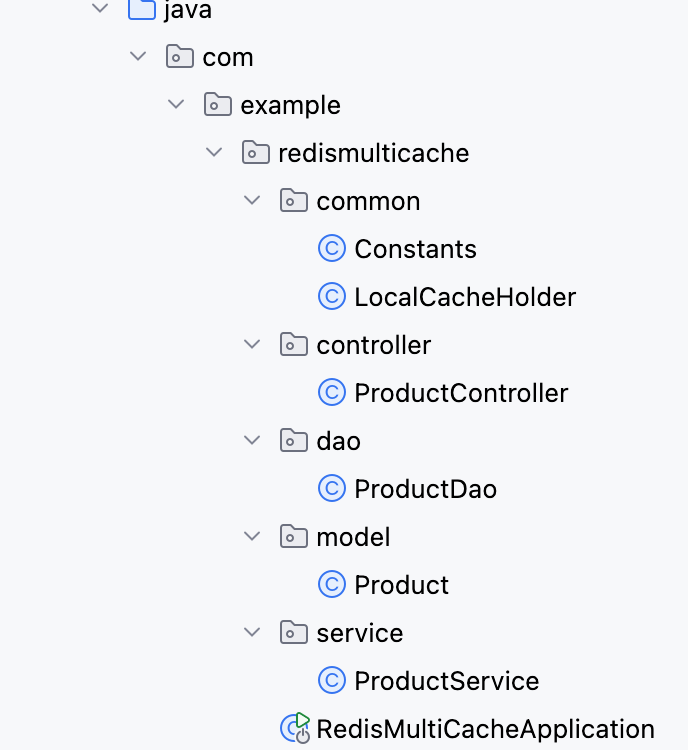
【Redis】笔记|第8节|大厂高并发缓存架构实战与优化
缓存架构 代码结构 代码详情 功能点: 多级缓存,先查本地缓存,再查Redis,最后才查数据库热点数据重建逻辑使用分布式锁,二次查询更新缓存采用读写锁提升性能采用Redis的发布订阅机制通知所有实例更新本地缓存适用读多…...

Linux nano命令的基本使用
参考资料 GNU nanoを使いこなすnano基础 目录 一. 简介二. 文件打开2.1 普通方式打开文件2.2 只读方式打开文件 三. 文件查看3.1 打开文件时,显示行号3.2 翻页查看 四. 文件编辑4.1 Ctrl K 复制 和 Ctrl U 粘贴4.2 Alt/Esc U 撤回 五. 文件保存与退出5.1 Ctrl …...

从面试角度回答Android中ContentProvider启动原理
Android中ContentProvider原理的面试角度解析,分为已启动和未启动两种场景: 一、ContentProvider已启动的情况 1. 核心流程 触发条件:当其他组件(如Activity、Service)通过ContentR…...

适应性Java用于现代 API:REST、GraphQL 和事件驱动
在快速发展的软件开发领域,REST、GraphQL 和事件驱动架构等新的 API 标准对于构建可扩展、高效的系统至关重要。Java 在现代 API 方面以其在企业应用中的稳定性而闻名,不断适应这些现代范式的需求。随着不断发展的生态系统,Java 在现代 API 方…...

实战三:开发网页端界面完成黑白视频转为彩色视频
一、需求描述 设计一个简单的视频上色应用,用户可以通过网页界面上传黑白视频,系统会自动将其转换为彩色视频。整个过程对用户来说非常简单直观,不需要了解技术细节。 效果图 二、实现思路 总体思路: 用户通过Gradio界面上…...

Vue 模板语句的数据来源
🧩 Vue 模板语句的数据来源:全方位解析 Vue 模板(<template> 部分)中的表达式、指令绑定(如 v-bind, v-on)和插值({{ }})都在一个特定的作用域内求值。这个作用域由当前 组件…...