强化学习10——免模型控制Q-learning算法
Q-learning算法
主要思路
由于 V π ( s ) = ∑ a ∈ A π ( a ∣ s ) Q π ( s , a ) V_\pi(s)=\sum_{a\in A}\pi(a\mid s)Q_\pi(s,a) Vπ(s)=∑a∈Aπ(a∣s)Qπ(s,a) ,当我们直接预测动作价值函数,在决策中选择Q值最大即动作价值最大的动作,则可以使策略和动作价值函数同时最优,那么由上述公式可得,状态价值函数也是最优的。
Q ( s t , a t ) ← Q ( s t , a t ) + α [ r t + γ max a Q ( s t + 1 , a ) − Q ( s t , a t ) ] Q(s_t,a_t)\leftarrow Q(s_t,a_t)+\alpha[r_t+\gamma\max_aQ(s_{t+1},a)-Q(s_t,a_t)] Q(st,at)←Q(st,at)+α[rt+γamaxQ(st+1,a)−Q(st,at)]
Q-learning基于时序差分的更新方法,具体流程如下所示:
- 初始化 Q ( s , a ) Q(s,a) Q(s,a)
- for 序列 e = 1 → E e=1\to E e=1→E do:
- 得到初始状态s
- for 时步 t = 1 → T t=1\to T t=1→T do:
- 使用 ϵ − g r e e d y \epsilon -greedy ϵ−greedy 策略根据Q选择当前状态s下的动作a
- 得到环境反馈 r , s ′ r,s' r,s′
- Q ( s , a ) ← Q ( s , a ) + α [ r + γ max a ′ Q ( s ′ , a ′ ) − Q ( s , a ) ] Q(s,a)\leftarrow Q(s,a)+\alpha[r+\gamma\max_{a^{\prime}}Q(s^{\prime},a^{\prime})-Q(s,a)] Q(s,a)←Q(s,a)+α[r+γmaxa′Q(s′,a′)−Q(s,a)]
- s ← s ′ s\gets s' s←s′
- end for
- end for
算法实战
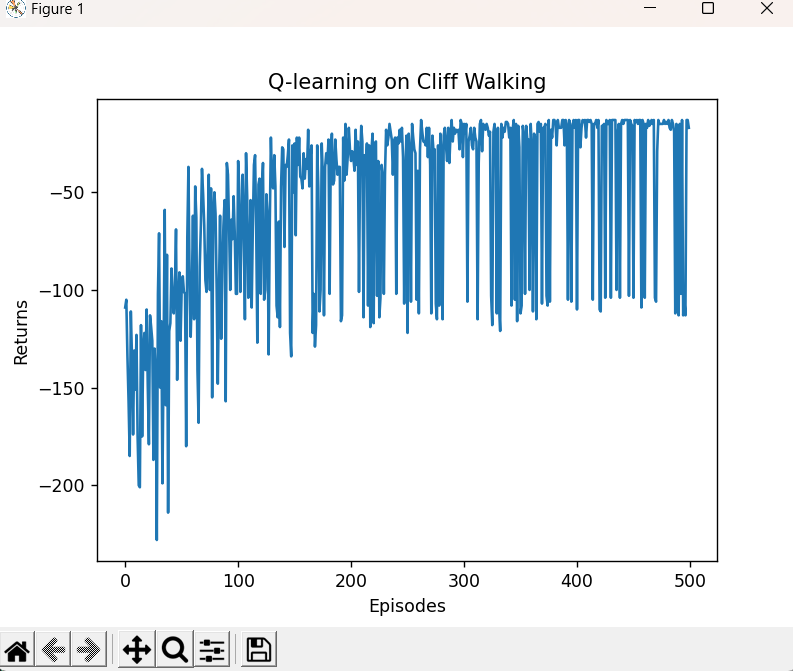
我们在悬崖漫步环境下实习Q-learning算法。
首先创建悬崖漫步的环境:
import matplotlib.pyplot as plt
import numpy as np
from tqdm import tqdm # tqdm是显示循环进度条的库class CliffWalkingEnv:def __init__(self, ncol, nrow):self.nrow = nrowself.ncol = ncolself.x = 0 # 记录当前智能体位置的横坐标self.y = self.nrow - 1 # 记录当前智能体位置的纵坐标def step(self, action): # 外部调用这个函数来改变当前位置# 4种动作, change[0]:上, change[1]:下, change[2]:左, change[3]:右。坐标系原点(0,0)# 定义在左上角change = [[0, -1], [0, 1], [-1, 0], [1, 0]]self.x = min(self.ncol - 1, max(0, self.x + change[action][0]))self.y = min(self.nrow - 1, max(0, self.y + change[action][1]))next_state = self.y * self.ncol + self.xreward = -1done = Falseif self.y == self.nrow - 1 and self.x > 0: # 下一个位置在悬崖或者目标done = Trueif self.x != self.ncol - 1:reward = -100return next_state, reward, donedef reset(self): # 回归初始状态,坐标轴原点在左上角self.x = 0self.y = self.nrow - 1return self.y * self.ncol + self.x
创建Q-learning算法
class QLearning:def __init__(self, ncol, nrow, epsilon, alpha, gamma,n_action=4):self.epsilon = epsilon # 随机探索的概率self.alpha = alpha # 学习率self.gamma = gamma # 折扣因子self.n_action = n_action # 动作数量# 给每一个状态创建一个长度为4的列表。self.Q_table = np.zeros([nrow*ncol,n_action]) # 初始化Q(s,a)def take_action(self,state):# 选取下一步的操作if np.random.random()<self.epsilon:action = np.random.randint(self.n_action) # 随机探索else:action = np.argmax(self.Q_table[state]) # 贪婪策略,选择Q值最大的动作return actiondef best_action(self, state): # 用于打印策略Q_max = np.max(self.Q_table[state])a = [0 for _ in range(self.n_action)]for i in range(self.n_action):if self.Q_table[state, i] == Q_max:a[i] = 1return adef update(self,s0,a0,r,s1):td_error = r+self.gamma*self.Q_table[s1].max()-self.Q_table[s0,a0]self.Q_table[s0, a0] += self.alpha * td_error
ncol = 12
nrow = 4
np.random.seed(0)
epsilon = 0.1
alpha = 0.1
gamma = 0.9
env = CliffWalkingEnv(ncol, nrow)
agent = QLearning(ncol, nrow, epsilon, alpha, gamma)
num_episodes = 500 # 智能体在环境中运行的序列的数量
return_list = [] # 记录每一条序列的回报
# 显示10个进度条
for i in range(10):# tqdm的进度条功能with tqdm(total=int(num_episodes / 10), desc='Iteration %d' % i) as pbar:for i_episode in range(int(num_episodes / 10)): # 每个进度条的序列数episode_return = 0state = env.reset()done = Falsewhile not done:action = agent.take_action(state)next_state, reward, done = env.step(action)episode_return += reward # 这里回报的计算不进行折扣因子衰减agent.update(state, action, reward, next_state)state = next_statereturn_list.append(episode_return)if (i_episode + 1) % 10 == 0: # 每10条序列打印一下这10条序列的平均回报pbar.set_postfix({'episode':'%d' % (num_episodes / 10 * i + i_episode + 1),'return':'%.3f' % np.mean(return_list[-10:])})pbar.update(1)episodes_list = list(range(len(return_list)))
plt.plot(episodes_list, return_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Q-learning on {}'.format('Cliff Walking'))
plt.show()action_meaning = ['^', 'v', '<', '>']
print('Q-learning算法最终收敛得到的策略为:')
def print_agent(agent, env, action_meaning, disaster=[], end=[]):for i in range(env.nrow):for j in range(env.ncol):if (i * env.ncol + j) in disaster:print('****', end=' ')elif (i * env.ncol + j) in end:print('EEEE', end=' ')else:a = agent.best_action(i * env.ncol + j)pi_str = ''for k in range(len(action_meaning)):pi_str += action_meaning[k] if a[k] > 0 else 'o'print(pi_str, end=' ')print()action_meaning = ['^', 'v', '<', '>']
print('Sarsa算法最终收敛得到的策略为:')
print_agent(agent, env, action_meaning, list(range(37, 47)), [47])
print_agent(agent, env, action_meaning, list(range(37, 47)), [47])
Iteration 0: 100%|███████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 2040.03it/s, episode=50, return=-105.700]
Iteration 1: 100%|███████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 2381.99it/s, episode=100, return=-70.900]
Iteration 2: 100%|███████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 3209.35it/s, episode=150, return=-56.500]
Iteration 3: 100%|███████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 3541.95it/s, episode=200, return=-46.500]
Iteration 4: 100%|███████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 5005.26it/s, episode=250, return=-40.800]
Iteration 5: 100%|███████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 3936.76it/s, episode=300, return=-20.400]
Iteration 6: 100%|███████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 4892.00it/s, episode=350, return=-45.700]
Iteration 7: 100%|███████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 5502.60it/s, episode=400, return=-32.800]
Iteration 8: 100%|███████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 6730.49it/s, episode=450, return=-22.700]
Iteration 9: 100%|███████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 6768.50it/s, episode=500, return=-61.700]
Q-learning算法最终收敛得到的策略为:
Qling算法最终收敛得到的策略为:
^ooo ovoo ovoo ^ooo ^ooo ovoo ooo> ^ooo ^ooo ooo> ooo> ovoo
ooo> ooo> ooo> ooo> ooo> ooo> ^ooo ooo> ooo> ooo> ooo> ovoo
ooo> ooo> ooo> ooo> ooo> ooo> ooo> ooo> ooo> ooo> ooo> ovoo
^ooo **** **** **** **** **** **** **** **** **** **** EEEE
^ooo ovoo ovoo ^ooo ^ooo ovoo ooo> ^ooo ^ooo ooo> ooo> ovoo
ooo> ooo> ooo> ooo> ooo> ooo> ^ooo ooo> ooo> ooo> ooo> ovoo
ooo> ooo> ooo> ooo> ooo> ooo> ooo> ooo> ooo> ooo> ooo> ovoo
^ooo **** **** **** **** **** **** **** **** **** **** EEEE
相关文章:
强化学习10——免模型控制Q-learning算法
Q-learning算法 主要思路 由于 V π ( s ) ∑ a ∈ A π ( a ∣ s ) Q π ( s , a ) V_\pi(s)\sum_{a\in A}\pi(a\mid s)Q_\pi(s,a) Vπ(s)∑a∈Aπ(a∣s)Qπ(s,a) ,当我们直接预测动作价值函数,在决策中选择Q值最大即动作价值最大的动作&…...
【数据库】CRUD常用函数UNION 和 UNION ALL
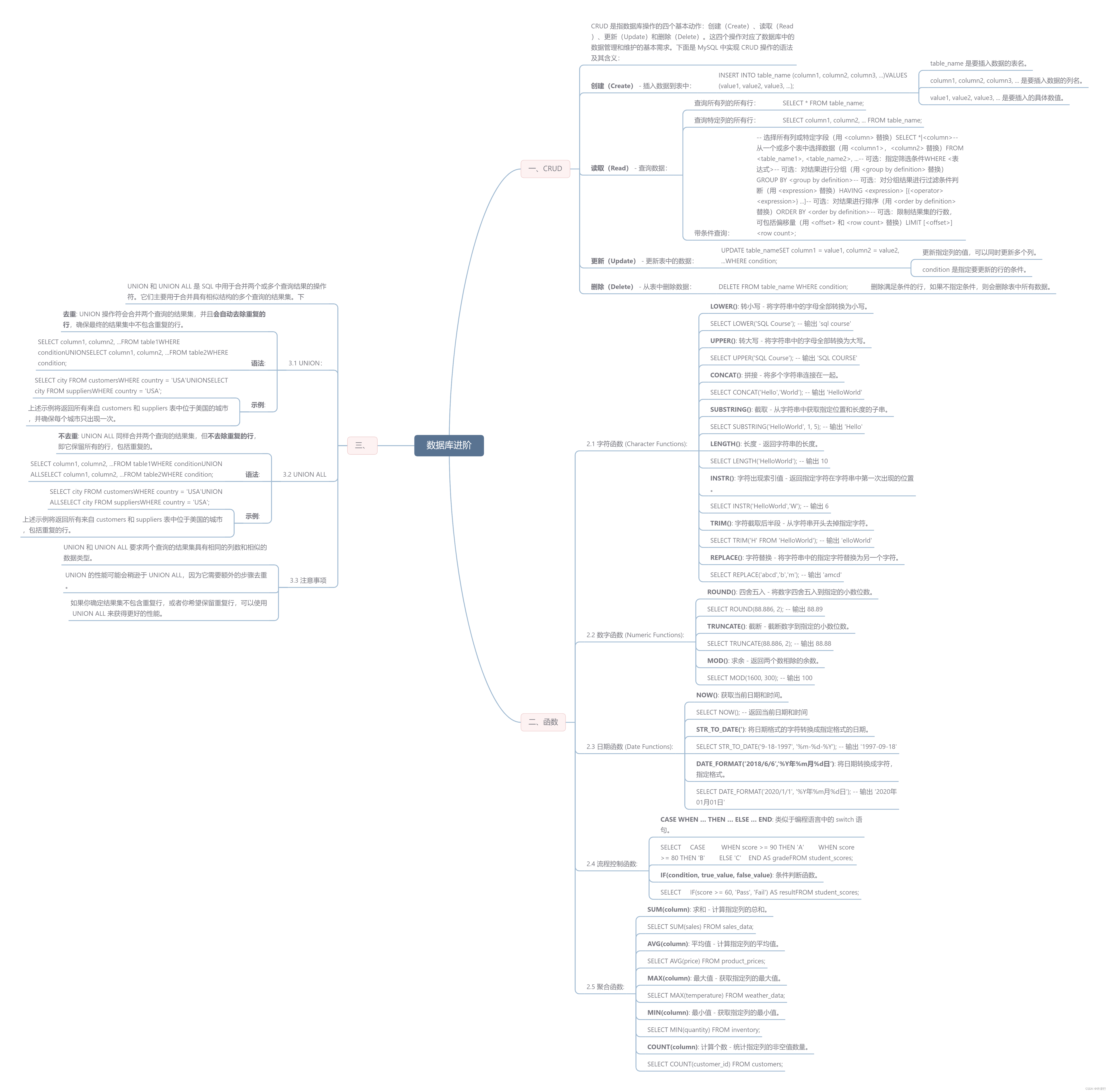
文章目录 一、CRUD二、函数2.1 字符函数 (Character Functions):2.2 数字函数 (Numeric Functions):2.3 日期函数 (Date Functions):2.4 流程控制函数:2.5 聚合函数: 三、UNION 和 UNION ALL3.1 UNION:3.2 UNION ALL3.3 注意事项 一、CRUD CRUD 是指数据库操作的四…...
Adding Conditional Control to Text-to-Image Diffusion Models——【论文笔记】
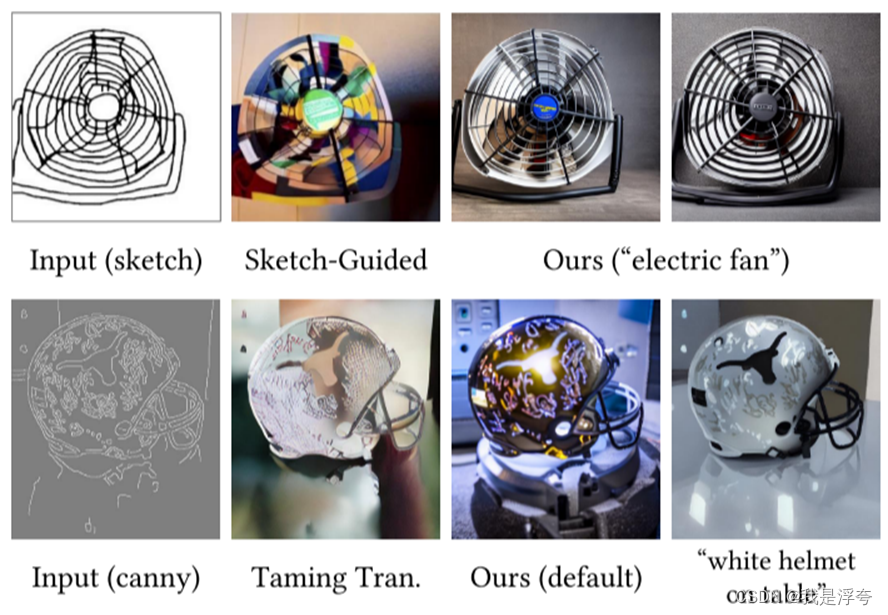
本文发表于ICCV2023 论文地址:ICCV 2023 Open Access Repository (thecvf.com) 官方实现代码:lllyasviel/ControlNet: Let us control diffusion models! (github.com) Abstract 论文提出了一种神经网络架构ControlNet,可以将空间条件控制添加到大型…...

Python与人工智能
Python 是一种广泛用于人工智能(AI)开发的编程语言。Python具有简洁的语法和强大的库支持,使其成为数据科学、机器学习和深度学习的理想选择。 Python中有许多库可以帮助实现人工智能,其中最流行的包括TensorFlow和PyTorch。这些…...
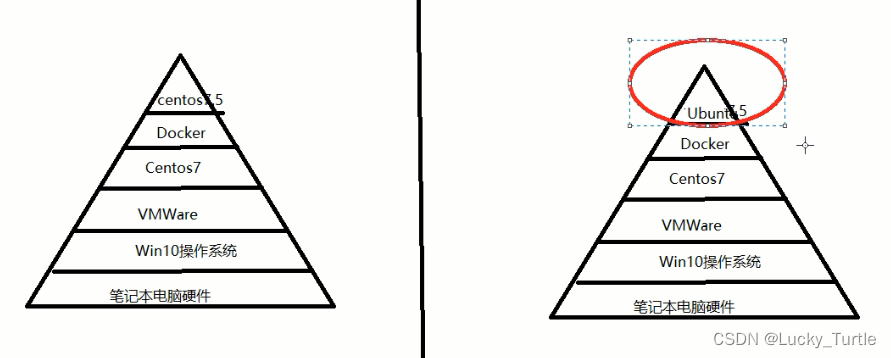
【Docker】Docker基础
文章目录 安装使用帮助启动命令镜像命令容器命令 安装 # 卸载旧版本 sudo yum remove docker \docker-client \docker-client-latest \docker-common \docker-latest \docker-latest-logrotate \docker-logrotate \docker-engine # 设置存储库 sudo yum install -y yum-utils …...
linux异常情况,排查处理中
登录客户环境后,发现一个奇怪情况如下图,之前也遇到过,直接fuser -ck /backup操作的话,主机将会重启,因数据库运行中,等待停机维护时间,同时也在想办法不重启的情况下解决该问题 [rootdb ~]# f…...

Spring Boot参数校验方案
NotNull:值不能为null;NotEmpty:字符串、集合或数组的值不能为空,即长度大于0;NotBlank:字符串的值不能为空白,即不能只包含空格;Size:字符串、集合或数组的大小是否在指…...
【漏洞复现】ActiveMQ反序列化漏洞(CVE-2015-5254)
Nx01 产品简介 Apache ActiveMQ是Apache软件基金会所研发的开放源代码消息中间件。ActiveMQ是消息队列服务,是面向消息中间件(MOM)的最终实现,它为企业消息传递提供高可用、出色性能、可扩展、稳定和安全保障。 Nx02 漏洞描述 Re…...
面试题:MySQL误删表数据,如何快速恢复丢失的数据?
相信后端研发的同学在开发过程经常会遇到产品临时修改线上数据的需求,如果手法很稳那么很庆幸可以很快完成任务,很不幸某一天突然手一抖把表里的数据修改错误或者误删了,这个时候你会发现各种问题反馈接踵而来。 如果身边有BDA或者有这方面经…...
李沐之神经网络基础
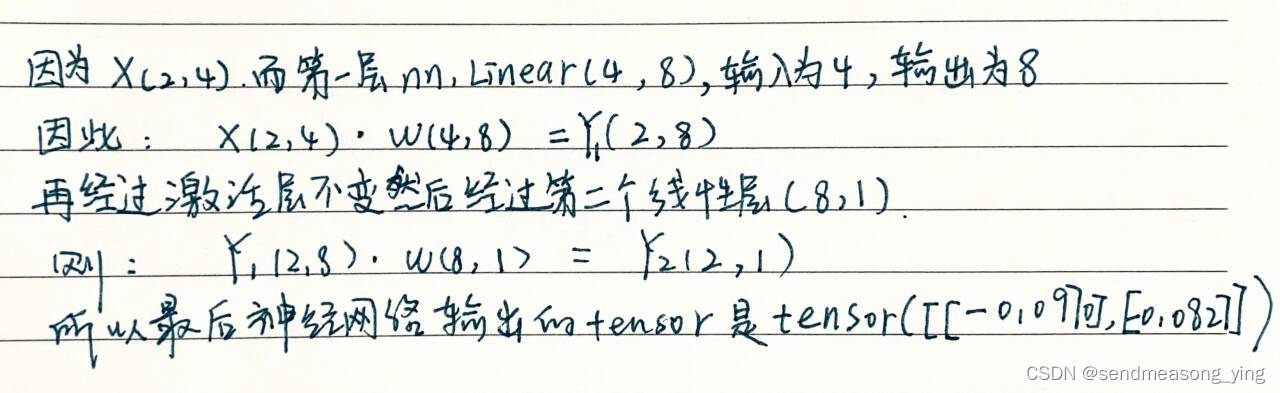
目录 1.模型构造 1.1层和块 1.2自定义块 1.3顺序块 1.4在前向传播函数中执行代码 2.参数管理 2.1参数访问 2.2参数初始化 3.自定义层 3.1不带参数的层 3.2带参数的层 4.读写文件 4.1加载和保存张量 4.2加载和保存模型参数 1.模型构造 1.1层和块 import torch fr…...

【docker】使用 Dockerfile 构建镜像
一、什么是Dockerfile Dockerfile 是用于构建 Docker 镜像的文本文件。它包含了一系列的指令,用于描述如何构建镜像的步骤和配置。 通过编写 Dockerfile,您可以定义镜像的基础环境、安装软件包、复制文件、设置环境变量等操作。Dockerfile 提供了一种可…...
计算机网络—— 概述
概述 1.1 因特网概述 网络、互联网和因特网 网络由若干结点和连接这些结点的链路组成多个网络还可以通过路由器互联起来,这样就构成了一个覆盖范围更大的网络,即互联网(或互连网)。因特网(Internet)是世…...

“超人练习法”系列06:如何更好地掌握技能?
01 掌握的阶段 关于人类学习新事物的最生动、最精妙的比喻,我是从笑来老师那里学到的。 他指出,学习新知识、新概念犹如在构建自己大脑皮层,每个习得的概念就像是大脑皮层上的一个个微小神经元。 一个看似聪明、博学的人,总能在各…...

【华为OD机试真题2023CD卷 JAVAJS】字符串拼接
华为OD2023(C&D卷)机试题库全覆盖,刷题指南点这里 字符串拼接 知识点数组递归 时间限制:1s 空间限制:256MB 限定语言:不限 题目描述: 给定M(0<M<=30)个字符(a-z),从中取出任意字符(每个字符只能用一次)拼接成长度为N(0<N<=5)的字符串,要求相同的字…...

【算法】链表-20240109
这里写目录标题 一、141. 环形链表二、876. 链表的中间结点三、面试题 02.01. 移除重复节点 一、141. 环形链表 简单 给你一个链表的头节点 head ,判断链表中是否有环。 如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中…...
机器学习系列--R语言随机森林进行生存分析(2)
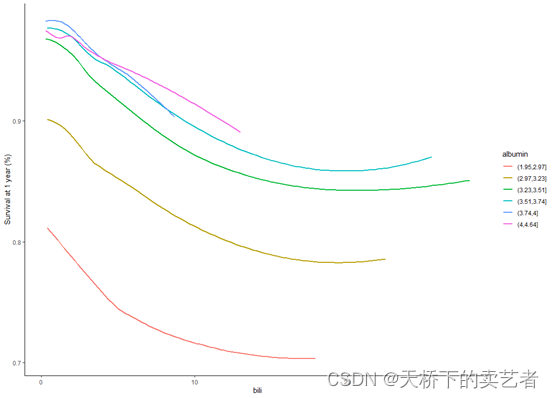
随机森林(Breiman 2001a)(RF)是一种非参数统计方法,需要没有关于响应的协变关系的分布假设。RF是一种强大的、非线性的技术,通过拟合一组树来稳定预测精度模型估计。随机生存森林(RSF࿰…...

Flutter GetX 之 状态管理
上一篇文章为大家介绍了 GetX的 路由管理,让大家对GetX有了初步了解,今天为大家介绍一下GetX的 状态管理。 StatelessWidget 和 StatefulWidget 介绍 在介绍之前,先简单介绍一下 Flutter 页面的 StatelessWidget 和 StatefulWidget ,其实Flutter的本质是万物都是Widget,…...
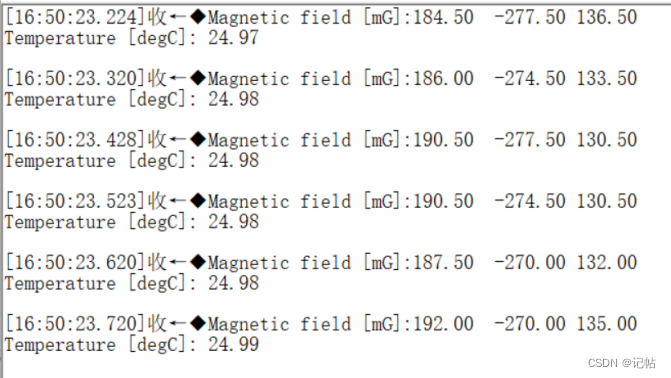
e2studio开发磁力计LIS2MDL(1)----轮询获取磁力计数据
e2studio开发磁力计LIS2MDL.1--轮询获取磁力计数据 概述视频教学样品申请源码下载速率新建工程工程模板保存工程路径芯片配置工程模板选择时钟设置UART配置UART属性配置设置e2studio堆栈e2studio的重定向printf设置R_SCI_UART_Open()函数原型回调函数user_uart_callback ()prin…...

C++ 字符串大小写转换,替换,文件保存 方法封装
此示例程序方法已经封装好使用std::islower()函数可以检查一个字符是否是小写字母,使用std::isupper()函数可以检查一个字符是否是大写字母。 如果传入的字母是小写字母,则使用std::toupper()函数将其转换为大写字母,并输出转换后的结果。 如果输入的字母是大写字母,则使…...
计算机基础面试题 |19.精选计算机基础面试题
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云…...
接口测试中缓存处理策略
在接口测试中,缓存处理策略是一个关键环节,直接影响测试结果的准确性和可靠性。合理的缓存处理策略能够确保测试环境的一致性,避免因缓存数据导致的测试偏差。以下是接口测试中常见的缓存处理策略及其详细说明: 一、缓存处理的核…...
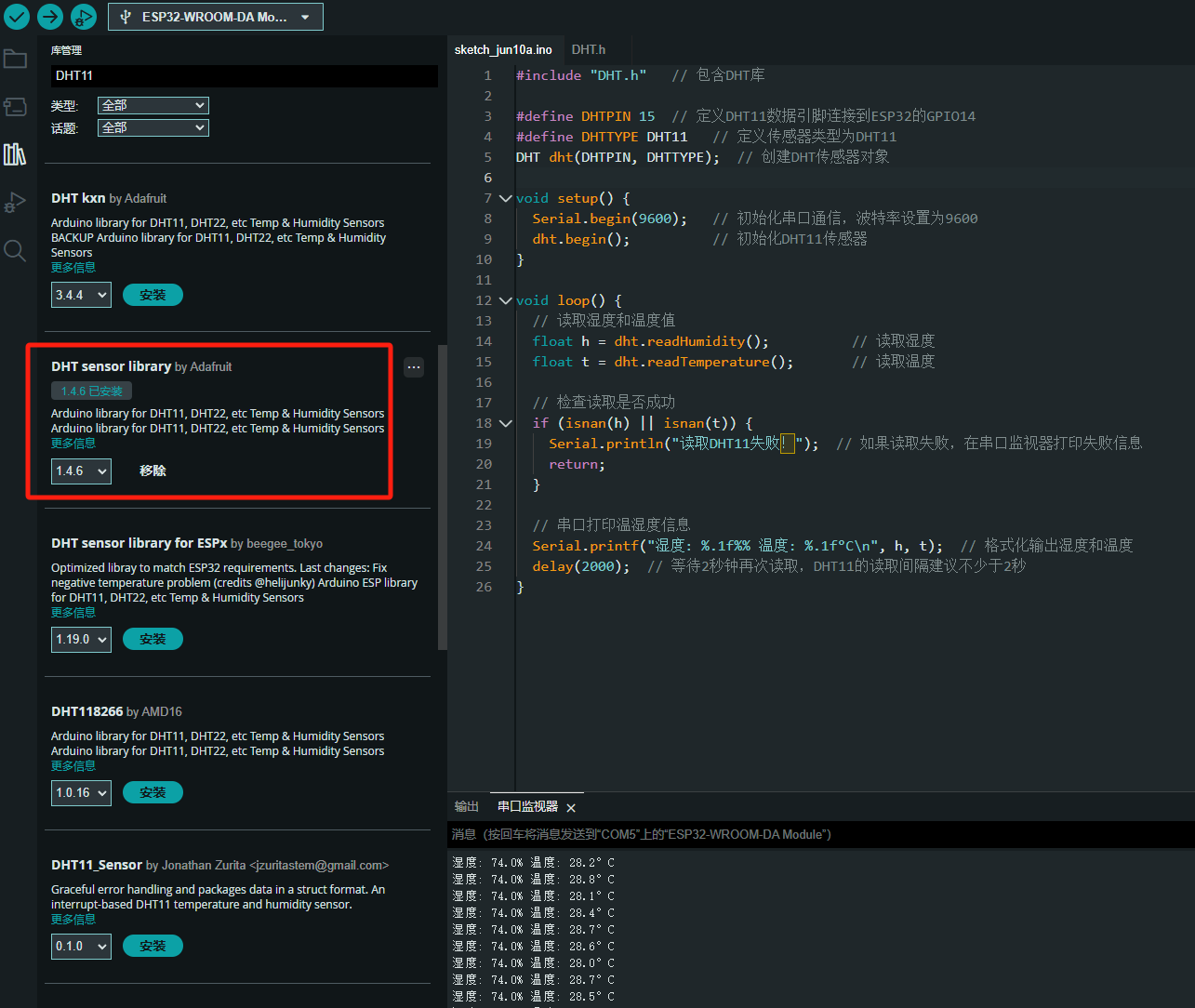
ESP32读取DHT11温湿度数据
芯片:ESP32 环境:Arduino 一、安装DHT11传感器库 红框的库,别安装错了 二、代码 注意,DATA口要连接在D15上 #include "DHT.h" // 包含DHT库#define DHTPIN 15 // 定义DHT11数据引脚连接到ESP32的GPIO15 #define D…...
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility 1. 实验室环境1.1 实验室环境1.2 小测试 2. The Endor System2.1 部署应用2.2 检查现有策略 3. Cilium 策略实体3.1 创建 allow-all 网络策略3.2 在 Hubble CLI 中验证网络策略源3.3 …...

Java - Mysql数据类型对应
Mysql数据类型java数据类型备注整型INT/INTEGERint / java.lang.Integer–BIGINTlong/java.lang.Long–––浮点型FLOATfloat/java.lang.FloatDOUBLEdouble/java.lang.Double–DECIMAL/NUMERICjava.math.BigDecimal字符串型CHARjava.lang.String固定长度字符串VARCHARjava.lang…...
)
python爬虫:Newspaper3k 的详细使用(好用的新闻网站文章抓取和解析的Python库)
更多内容请见: 爬虫和逆向教程-专栏介绍和目录 文章目录 一、Newspaper3k 概述1.1 Newspaper3k 介绍1.2 主要功能1.3 典型应用场景1.4 安装二、基本用法2.2 提取单篇文章的内容2.2 处理多篇文档三、高级选项3.1 自定义配置3.2 分析文章情感四、实战案例4.1 构建新闻摘要聚合器…...

【android bluetooth 框架分析 04】【bt-framework 层详解 1】【BluetoothProperties介绍】
1. BluetoothProperties介绍 libsysprop/srcs/android/sysprop/BluetoothProperties.sysprop BluetoothProperties.sysprop 是 Android AOSP 中的一种 系统属性定义文件(System Property Definition File),用于声明和管理 Bluetooth 模块相…...
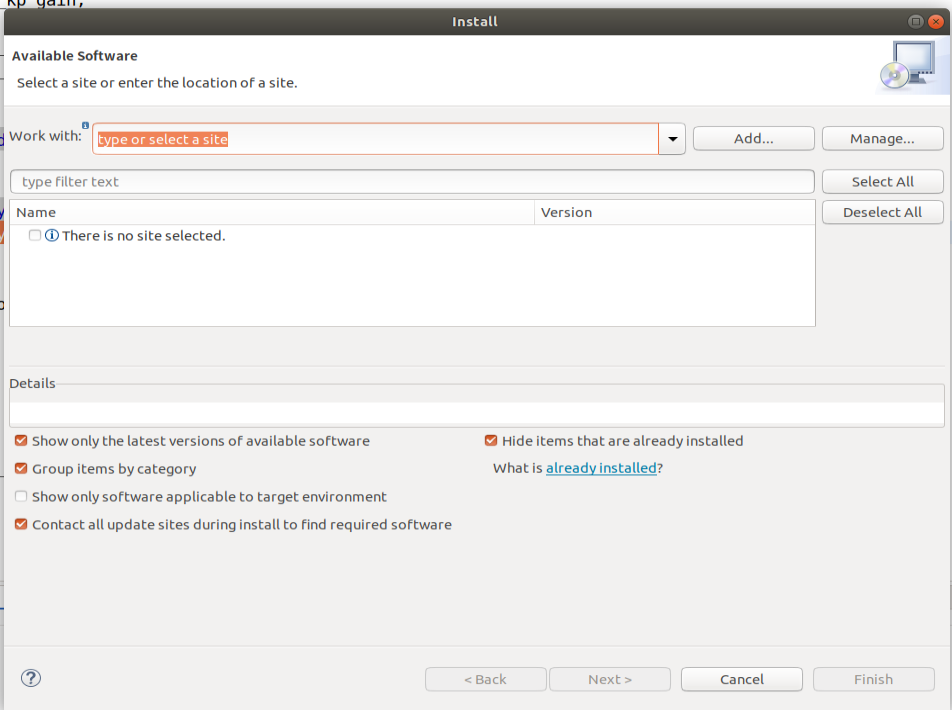
ardupilot 开发环境eclipse 中import 缺少C++
目录 文章目录 目录摘要1.修复过程摘要 本节主要解决ardupilot 开发环境eclipse 中import 缺少C++,无法导入ardupilot代码,会引起查看不方便的问题。如下图所示 1.修复过程 0.安装ubuntu 软件中自带的eclipse 1.打开eclipse—Help—install new software 2.在 Work with中…...

NFT模式:数字资产确权与链游经济系统构建
NFT模式:数字资产确权与链游经济系统构建 ——从技术架构到可持续生态的范式革命 一、确权技术革新:构建可信数字资产基石 1. 区块链底层架构的进化 跨链互操作协议:基于LayerZero协议实现以太坊、Solana等公链资产互通,通过零知…...

MySQL中【正则表达式】用法
MySQL 中正则表达式通过 REGEXP 或 RLIKE 操作符实现(两者等价),用于在 WHERE 子句中进行复杂的字符串模式匹配。以下是核心用法和示例: 一、基础语法 SELECT column_name FROM table_name WHERE column_name REGEXP pattern; …...
短视频矩阵系统文案创作功能开发实践,定制化开发
在短视频行业迅猛发展的当下,企业和个人创作者为了扩大影响力、提升传播效果,纷纷采用短视频矩阵运营策略,同时管理多个平台、多个账号的内容发布。然而,频繁的文案创作需求让运营者疲于应对,如何高效产出高质量文案成…...