mavros和PX4中的海拔高与椭球高转换
飞控高度传感器中一般有两种高度:
- 海拔高。也称AMSL(Above Mean Sea Level)height或者geoid height或者正高,顾名思义就是指高于当地平均海平面的高度。我猜气压计测得的高度应当就是与海平面相关的。
- 椭球高。也称ellipsoid height或者大地高。顾名思义就是指相对于WGS84地球标准椭球模型的高度。GPS定位系统普遍采用的WGS84坐标系,给出的高度就是ellipsoid高度。
同一个位置的两种高度值一般可以相差几十米,这是因为当地平均海平面是和地形有关的,凹凸不平没有规律。而ellipsoid height采用的基准是地球标准椭球模型,它的高度值和地形没有关系,只和到地心的距离有关。
下文的mavros指ros1 noetic版本的,ros2版本的我还没研究。
Mavros
mavros/global_position/global话题
此话题发布经纬高,其中高度是ellipsoid height椭球高。其实px4的GLOBAL_POSITION_INT mavlink消息发布的高度是geoid height海拔高度,但是mavros做了转换后再发布到global话题,具体这个转换在:
https://github.com/mavlink/mavros/blob/master/mavros/src/plugins/global_position.cpp#L144-L150
template<typename MsgT>inline void fill_lla(MsgT &msg, sensor_msgs::NavSatFix::Ptr fix){fix->latitude = msg.lat / 1E7; // degfix->longitude = msg.lon / 1E7; // degfix->altitude = msg.alt / 1E3 + m_uas->geoid_to_ellipsoid_height(fix); // in meters}
geoid_to_ellipsoid_height()就是海拔高转换为椭球高的函数。要进行这个转换,需要知道地球所有地点的平均海拔高,这是一个相当大的数据集。还记得安装mavros的时候需要执行一个install_geographiclib_datasets.sh脚本吗,其实这就是在安装egm96_5库,这个库存放了地球所有地点的平均海拔高模型,并提供每个经纬度点的海拔高和椭球高的差值。实测导入egm96_5库需要额外的18MB内存。
顺便一提,这个话题发布的经纬度只有七位小数精度,因为PX4的GLOBAL_POSITION_INT mavlink消息stream的时候,将经纬度乘了1e7变成了整型,mavros接收mavlink消息后再除了1e7,因此损失了经纬度七位小数之后的精度(大概相当于几厘米)。
下面这段c++代码可以用于海拔高转换为椭球高:
#include <GeographicLib/Geoid.hpp>
#include <memory> // for std::shared_ptr
std::shared_ptr<GeographicLib::Geoid> egm96_5; // This class loads egm96_5 dataset to RAM, it is about 24 MiB.
egm96_5 = std::make_shared<GeographicLib::Geoid>("egm96-5", "", true, true); // Using smallest dataset with 5' grid, // From default location, // Use cubic interpolation, Thread safe
alt_ellipsoid = alt_amsl + GeographicLib::Geoid::GEOIDTOELLIPSOID * (*egm96_5)(lat, lon); // AMSL TO WGS84 altitude执行代码需要安装egm96,这里借用安装mavros时的脚本:
wget https://gitee.com/shu-peixuan/px4mocap/raw/85b46df9912338f775949903841160c873af4a1d/ROS-install-command/install_geographiclib_datasets.sh
sudo chmod a+x ./install_geographiclib_datasets.sh
sudo ./install_geographiclib_datasets.sh # this step takes some time
rm install_geographiclib_datasets.shmavros/global_position/local话题
这个话题发布的是ENU东北天坐标。但它和mavros/local_position/pose还不一定一样。它是由ECEF地球坐标系中的坐标相对于地图原点map origin转换到ENU东北天坐标系。这个地图原点的选取可能是当前点,或者地图点,或者设置的map origin。看看mavros源码吧:
https://github.com/mavlink/mavros/blob/master/mavros/src/plugins/global_position.cpp#L330-L365
/*** @brief Checks if the "map" origin is set.* - If not, and the home position is also not received, it sets the current fix as the origin;* - If the home position is received, it sets the "map" origin;* - If the "map" origin is set, then it applies the rotations to the offset between the origin* and the current local geocentric coordinates.*/
// Current fix to ECEF
map.Forward(fix->latitude, fix->longitude, fix->altitude,map_point.x(), map_point.y(), map_point.z());// Set the current fix as the "map" origin if it's not set
if (!is_map_init && fix->status.status >= sensor_msgs::NavSatStatus::STATUS_FIX) {map_origin.x() = fix->latitude;map_origin.y() = fix->longitude;map_origin.z() = fix->altitude;ecef_origin = map_point; // Local position is zerois_map_init = true;
}
}
catch (const std::exception& e) {
ROS_INFO_STREAM("GP: Caught exception: " << e.what() << std::endl);
}// Compute the local coordinates in ECEF
local_ecef = map_point - ecef_origin;
// Compute the local coordinates in ENU
tf::pointEigenToMsg(ftf::transform_frame_ecef_enu(local_ecef, map_origin), odom->pose.pose.position);/*** @brief By default, we are using the relative altitude instead of the geocentric* altitude, which is relative to the WGS-84 ellipsoid*/
if (use_relative_alt)
odom->pose.pose.position.z = relative_alt->data;odom->pose.pose.orientation = m_uas->get_attitude_orientation_enu();这里面的odom就是发布到mavros/global_position/local话题的消息。可以看到它的高度默认是相对高度relative_alt。这个相对高度是由px4的GLOBAL_POSITION_INT mavlink消息发布的,是px4飞控内部对于相对地面/起飞点高度的一个估计。
可以看出,mavros/global_position/local话题没什么用,还不如用mavros/local_position/pose。
mavros/setpoint_raw/global话题
这个话题用于向飞控发布期望的经纬高setpoint,我在四旋翼利用mavros进行GPS坐标指点飞行_/mavros/setpoint_raw/local-CSDN博客一文中已经指出,尽量不要直接用这个话题发送GPS目标位置点,可以用mavros/setpoint_raw/local代替。
如果你非要用这个话题,那么我们看看发送的经纬高setpoint中的高度是什么:
https://github.com/mavlink/mavros/blob/master/mavros/src/plugins/setpoint_raw.cpp#L205-L234
void global_cb(const mavros_msgs::GlobalPositionTarget::ConstPtr &req)
{Eigen::Vector3d velocity, af;float yaw, yaw_rate;tf::vectorMsgToEigen(req->velocity, velocity);tf::vectorMsgToEigen(req->acceleration_or_force, af);// Transform frame ENU->NEDvelocity = ftf::transform_frame_enu_ned(velocity);af = ftf::transform_frame_enu_ned(af);yaw = ftf::quaternion_get_yaw(ftf::transform_orientation_aircraft_baselink(ftf::transform_orientation_ned_enu(ftf::quaternion_from_rpy(0.0, 0.0, req->yaw))));Eigen::Vector3d ang_vel_enu(0.0, 0.0, req->yaw_rate);auto ang_vel_ned = ftf::transform_frame_ned_enu(ang_vel_enu);yaw_rate = ang_vel_ned.z();set_position_target_global_int(req->header.stamp.toNSec() / 1000000,req->coordinate_frame, //代表经纬高采用的坐标系(主要针对高度)req->type_mask,req->latitude * 1e7,req->longitude * 1e7,req->altitude, //直接通过SET_POSITION_TARGET_GLOBAL_INT mavlink消息发给px4了velocity,af,yaw, yaw_rate);
}这里的经纬高是直接通过SET_POSITION_TARGET_GLOBAL_INT mavlink消息发给px4了,经纬度还乘了1e7变成整型,所以损失了第七位小数之后的经纬值(大概相当于几厘米)。
PX4中是怎么处理SET_POSITION_TARGET_GLOBAL_INT mavlink消息的呢,让我们看看px4 v1.13.3(2023年底)中mavlink_receiver.cpp的代码:
https://github.com/PX4/PX4-Autopilot/blob/v1.13.3/src/modules/mavlink/mavlink_receiver.cpp#L1135-L1256
if (target_global_int.coordinate_frame == MAV_FRAME_GLOBAL_INT) {setpoint.z = local_pos.ref_alt - target_global_int.alt; // setpoint.z就是px4具体track的local高度} else if (target_global_int.coordinate_frame == MAV_FRAME_GLOBAL_RELATIVE_ALT_INT) {home_position_s home_position{};_home_position_sub.copy(&home_position);if (home_position.valid_alt) {const float alt = home_position.alt - target_global_int.alt;setpoint.z = alt - local_pos.ref_alt; // setpoint.z就是px4具体track的local高度} else {// home altitude requiredreturn;}} else if (target_global_int.coordinate_frame == MAV_FRAME_GLOBAL_TERRAIN_ALT_INT) {vehicle_global_position_s vehicle_global_position{};_vehicle_global_position_sub.copy(&vehicle_global_position);if (vehicle_global_position.terrain_alt_valid) {const float alt = target_global_int.alt + vehicle_global_position.terrain_alt;setpoint.z = local_pos.ref_alt - alt; // setpoint.z就是px4具体track的local高度} else {// valid terrain alt requiredreturn;}}原来是和mavlink消息中的coordinate_frame有关,可能是global高度、相对高度或者对地高度。不过这些高度含义其实不那么清晰,具体代表什么还得深挖px4源码。所以再次强调,尽量不要直接用这个话题发送GPS目标位置点。
参考:geoid 理解_egm2008大地水准面模型-CSDN博客
相关文章:

mavros和PX4中的海拔高与椭球高转换
飞控高度传感器中一般有两种高度: 海拔高。也称AMSL(Above Mean Sea Level)height或者geoid height或者正高,顾名思义就是指高于当地平均海平面的高度。我猜气压计测得的高度应当就是与海平面相关的。椭球高。也称ellipsoid heig…...
洛谷刷题-【入门2】分支结构
目录 1.苹果和虫子 题目描述 输入格式 输出格式 输入输出样例 2.数的性质 题目描述 输入格式 输出格式 输入输出样例 3.闰年判断 题目描述 输入格式 输出格式 输入输出样例 4.apples 题目描述 输入格式 输出格式 输入输出样例 5.洛谷团队系统 题目描述 …...
文件包含技术总结
开发人员一般会把重复使用的函数写到单个文件中,需要使用某个函数时直接调用此文件,而无需再次编写,这中文件调用的过程一般被称为文件包含。 allow_url_fopen On(是否允许打开远程文件) allow_url_include On&…...

Docker搭建私有仓库
Docker搭建私有仓库 下载docker registry镜像 docker pull docker.io/registry2.registry镜像下载完成后,先创建一个存放镜像的目录。 mkdir -p /data/registry3.启动registry容器 docker run -itd -p 5000:5000 -v /data/registry:/var/lib/registry docker.io…...

【计算机网络】【练习题】【新加坡南洋理工大学】【Computer Control Network】
说明: 仅供学习使用。 一、题目描述 该题目描述一个网络中传播时延(Transmission Delay)的例子。题目如下: 二、问题解答(个人) 笔者第3问采用均值不等式求解。标答中采用求导数的方法求极值。似乎均值…...
)
【学习笔记】CF1349F2 Slime and Sequences (Hard Version)
多项式工业警告!!! 点击看题意 思路来自 这位大佬 。 为什么这么好的题解没人评论。 Part 1 前置知识:拉格朗日反演(多项式复合),分式域(引入负整数次项)。 条件&a…...

HarmonyOS 鸿蒙应用开发( 六、实现自定义弹窗CustomDialog)
自定义弹窗(CustomDialog)可用于广告、中奖、警告、软件更新等与用户交互响应操作。开发者可以通过CustomDialogController类显示自定义弹窗。具体用法请参考自定义弹窗。 在应用的使用和开发中,弹窗是一个很常见的场景,自定义弹窗…...
FileChannel)
# Java NIO(一)FileChannel
Java NIO 1.BIO与NIO的区别 BIO为阻塞IO,NIO为非阻塞IO。 BIONIOJAVA1.4之前Java 1.4之后面向流:以byte为单位处理数据面向块:以块为单位处理数据同步阻塞同步非阻塞无选择器(Selector) 1.1NIO的核心组成部分 Cha…...

[嵌入式软件][启蒙篇][仿真平台] STM32F103实现串口输出输入、ADC采集
上一篇:[嵌入式软件][启蒙篇][仿真平台] STM32F103实现LED、按键 文章目录 一、串口输出(1) 简介(2) 示例代码(3) 仿真效果 二、串口输入(1) 简介(2) 示例代码(3) 仿真效果 三、ADC采集(1) 简介(2) 采集电压(3) 示例代码(电压)(4) 仿真效果 …...

Deepin基本环境查看(四)【硬盘/分区、文件系统、硬连接/软连接】
Linux操作系统(Deepin、Ubuntu)操作系统中,硬盘分区的管理与Windows操作系统不同; 在Linux系统中维护着一个统一的文件目录体系,而硬盘和分区是以资源的形式由操作系统挂接和调度;此外Linux系统中连接(硬连…...
JS之打地鼠案例
需要素材的同学可以私信我 效果图: 上代码: <!DOCTYPE html> <html> <head><meta charset"utf-8"><title></title><style>* {margin: 0;padding: 0;}.box {position: relative;width: 320px;heigh…...

Kubernetes入门
k8s相关基础知识 文章目录 k8s相关基础知识1、Container2、PodPod 与 Container 的不同Pod 其它命令 3、Deployment扩容升级版本Rolling update(滚动更新)存活探针(livenessProb)就绪探针(readiness) 4、ServiceClusterIPNodePortLoadBalancer 5、Ingres…...

EtherNet/IP开发:C++搭建基础模块,EtherNet/IP源代码
这里是CIP资料的协议层级图,讲解协议构造。 ODVA(www.ODVA.org)成立于1995年,是一个全球性协会,其成员包括世界领先的自动化公司。结合其成员的支持,ODVA的使命是在工业自动化中推进开放、可互操作的信息和…...

Django(九)
1. 用户登录-Cookie和Session 什么是cookie和session? 发送HTTP请求或者HTTPS请求(无状态&短连接) http://127.0.0.1:8000/admin/list/ https://127.0.0.1:8000/admin/list/http无状态短连接:一次请求响应之后断开连接,再发请求重新连…...
)
解决Android Studio Unexpected tokens (use ; to separate expressions on the same line)
[TOC](Unexpected tokens (use ; to separate expressions on the same line)) 问题描述:Unexpected tokens (use ; to separate expressions on the same line) 原因:Android Studio 更新到最新的版本之后,gradle工程目录结构发生改变 问…...
【云原生】Docker网络模式和Cgroup资源限制
目录 一、Docker 网络实现原理 二、Docker 的网络模式 #网络模式详解: 第一种:host模式 第二种:bridge模式 第三种:container模式 第四种:none模式 第五种:自定义网络 三、Cgroup资源控制 第一种&a…...

实战:加密传输数据解密
前言 下面将分享一些实际的渗透测试经验,帮助你应对在测试中遇到的数据包内容加密的情况。我们将以实战为主,技巧为辅,进入逆向的大门。 技巧 开局先讲一下技巧,掌握好了技巧,方便逆向的时候可以更加快速的找到关键…...

前端开发提高效率的两大工具
一、浏览器中的开发者工具 怎么启动开发者工具? 在浏览器中按下F12或者鼠标右键点击检查 怎么利用(常用的几点)? 1、元素 点击标红的图标可以用于在页面选择元素,同时右侧会找到元素在前端代码中的位置 点击下方红…...
探索设计模式的魅力:深入理解面向对象设计的深层原则与思维
如何同时提高一个软件系统的可维护性 和 可复用性是面向对象对象要解决的核心问题。 通过学习和应用设计模式,可以更加深入地理解面向对象的设计理念,从而帮助设计师改善自己的系统设计。但是,设计模式并不能够提供具有普遍性的设计指导原则。…...
【Py/Java/C++三种语言详解】LeetCode每日一题240122【贪心】LeetCode670、最大交换
文章目录 题目链接题目描述解题思路为什么是贪心一个带图的例子 代码pythonjavacpp时空复杂度 华为OD算法/大厂面试高频题算法练习冲刺训练 题目链接 LeetCode670、最大交换 题目描述 给定一个非负整数数组 nums 和一个整数 k ,你需要将这个数组分成 k 个非空的连…...

【Linux】shell脚本忽略错误继续执行
在 shell 脚本中,可以使用 set -e 命令来设置脚本在遇到错误时退出执行。如果你希望脚本忽略错误并继续执行,可以在脚本开头添加 set e 命令来取消该设置。 举例1 #!/bin/bash# 取消 set -e 的设置 set e# 执行命令,并忽略错误 rm somefile…...

渲染学进阶内容——模型
最近在写模组的时候发现渲染器里面离不开模型的定义,在渲染的第二篇文章中简单的讲解了一下关于模型部分的内容,其实不管是方块还是方块实体,都离不开模型的内容 🧱 一、CubeListBuilder 功能解析 CubeListBuilder 是 Minecraft Java 版模型系统的核心构建器,用于动态创…...
学习STC51单片机31(芯片为STC89C52RCRC)OLED显示屏1
每日一言 生活的美好,总是藏在那些你咬牙坚持的日子里。 硬件:OLED 以后要用到OLED的时候找到这个文件 OLED的设备地址 SSD1306"SSD" 是品牌缩写,"1306" 是产品编号。 驱动 OLED 屏幕的 IIC 总线数据传输格式 示意图 …...
指令的指南)
在Ubuntu中设置开机自动运行(sudo)指令的指南
在Ubuntu系统中,有时需要在系统启动时自动执行某些命令,特别是需要 sudo权限的指令。为了实现这一功能,可以使用多种方法,包括编写Systemd服务、配置 rc.local文件或使用 cron任务计划。本文将详细介绍这些方法,并提供…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个生活电费的缴纳和查询小程序
一、项目初始化与配置 1. 创建项目 ohpm init harmony/utility-payment-app 2. 配置权限 // module.json5 {"requestPermissions": [{"name": "ohos.permission.INTERNET"},{"name": "ohos.permission.GET_NETWORK_INFO"…...

Python ROS2【机器人中间件框架】 简介
销量过万TEEIS德国护膝夏天用薄款 优惠券冠生园 百花蜂蜜428g 挤压瓶纯蜂蜜巨奇严选 鞋子除臭剂360ml 多芬身体磨砂膏280g健70%-75%酒精消毒棉片湿巾1418cm 80片/袋3袋大包清洁食品用消毒 优惠券AIMORNY52朵红玫瑰永生香皂花同城配送非鲜花七夕情人节生日礼物送女友 热卖妙洁棉…...
uniapp手机号一键登录保姆级教程(包含前端和后端)
目录 前置条件创建uniapp项目并关联uniClound云空间开启一键登录模块并开通一键登录服务编写云函数并上传部署获取手机号流程(第一种) 前端直接调用云函数获取手机号(第三种)后台调用云函数获取手机号 错误码常见问题 前置条件 手机安装有sim卡手机开启…...

【JavaSE】多线程基础学习笔记
多线程基础 -线程相关概念 程序(Program) 是为完成特定任务、用某种语言编写的一组指令的集合简单的说:就是我们写的代码 进程 进程是指运行中的程序,比如我们使用QQ,就启动了一个进程,操作系统就会为该进程分配内存…...
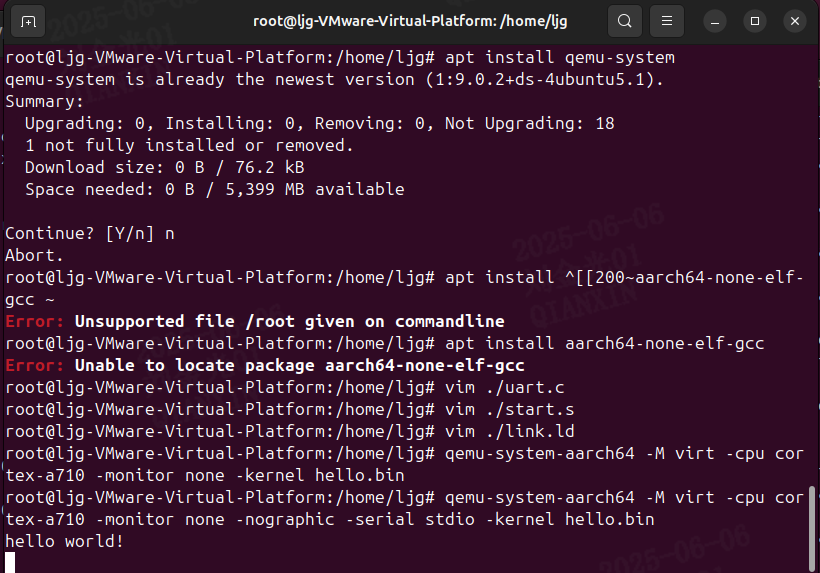
Qemu arm操作系统开发环境
使用qemu虚拟arm硬件比较合适。 步骤如下: 安装qemu apt install qemu-system安装aarch64-none-elf-gcc 需要手动下载,下载地址:https://developer.arm.com/-/media/Files/downloads/gnu/13.2.rel1/binrel/arm-gnu-toolchain-13.2.rel1-x…...

Python竞赛环境搭建全攻略
Python环境搭建竞赛技术文章大纲 竞赛背景与意义 竞赛的目的与价值Python在竞赛中的应用场景环境搭建对竞赛效率的影响 竞赛环境需求分析 常见竞赛类型(算法、数据分析、机器学习等)不同竞赛对Python版本及库的要求硬件与操作系统的兼容性问题 Pyth…...