嵌入式培训机构四个月实训课程笔记(完整版)-Linux ARM平台编程第五天-kernel配置(物联技术666)
链接:https://pan.baidu.com/s/1eb94AaDM-cIZsbr929Isbw?pwd=1688
提取码:1688
上午:linux内核介绍 徐登伟老师
下午:linux的配置
教学内容:
一、基本kernel的制作:
1、去开源社区下载原版kernel,linux-2.6.34.tar.bz2
2. 解压linux-2.6.34.tar.bz2源码包
tar jxvf linux-2.6.34.tar.bz2 -C /home/
3. 修改linux-2.6.34/Makefile文件,在makefile中找到以下两条信息并做修改
ARCH ? =arm //指定是arch/arm
CROSS_COMPILE ?=/usr/local/arm/4.3.2/bin/arm-linux- //指定编译器是目录下的交叉编译
注意:交叉编译器的环境变量也需要改为arm-linux-gcc-4.3.2
#export PATH=/usr/local/arm/4.3.2/bin/:$PATH //加入临时环境变量
4. 修改平台输入时钟
修改平台的时钟频率,修改内核源码“arch/arm/mach-s3c2440/mach-smdk2440.c”
把时钟初始化中(S3C24XX_init_clocks(16934400 ))的16934400 改为12000000,因为我们的开发板上为12M
5. 修改机器类型ID号(一般可以不修改,主要是要在vivi分表的时候和这里保持一致)
bootloader启动内核时,会传递机器类型ID进来,这里需根据bootloadr传进的ID修改内核ID号
在内核源码的“arch/arm/tools/mach-types”文件查找S3C2440,这里刚好与我们的bootloader相同,所以不用做修改,直接保存退出即可,如果不同则根据bootloader的内容修改此文件,或根据此文件修改boorloader的内容(在vivi中可通过param show查看)。
6. 解压yaffs_patch.tar.bz2源码包,进入yaffs2文件夹,给内核打上补丁使内核支持yaffs2
# ./ patch-ker.sh c /home/linux-2.6.34
7. 修改内核mtd分区和bootloader(vivi)使其一致(这步主要是为vivi服务)
编辑文件arch/arm/plat-s3c24xx/common-smdk.c(同样和vivi分表一致)
static struct mtd_partition smdk_default_nand_part[] =
{
[0] = {
.name = "vivi", //命令名字
.size = 0x00030000, //大小
.offset = 0, //开始位置
},
[1] = {
.name = "kernel",
.offset = 0x00050000,
.size = 0x00300000,
},
[2] = {
.name = "rootfs",
.offset = 0x00350000,
.size = 0x03cac000,
}
};
8. 修改文件drivers/mtd/nand/s3c2410.c
将s3c2410_nand_init_chip函数里的NAND_ECC_SOFT(switch case后面的不用改)改为NAND_ECC_NONE(因为在内核中默认配置不支持ECC校验,当然也可以在内核配置时选中ECC选项)
9. 到llinux-2.6.30目录下执行命令
#cp arch/arm/configs/s3c2410_defconfig .config
10. 执行make menuconfig,并对选项进行配置
1)System Type --->
S3C2440 and S3C2442 machines --->
仅保留SMDK2440 与SMDK2440 whith S3C2440 CPU module两个选项,将其他的选项全部勾掉
2)Kernel Features --->
[*]Use the arm EABI to compile the kernel(选中该选项)
3)File systems --->
a、把与ext2 ext3 ext4相关的所有选项全部去掉
b、Miscellaneous filesystems --->
<*>YAFFS2 file system support(选中此选项)
去除所有与jffs2相关的选项
保存退出
11、make zImage,在arch/arm/boot下生成编译好的可执行程序
或make uImage,在arch/arm/boot下生成编译好的可执行程序
二、带设备驱动的kernel
开始先重复上面的1-10步:
1、dm9000网卡驱动的移植:
1)修改arch/arm/plat-s3c24xx/devs.c 文件,增加以下代码:
/****add by dengwei*********************************/
#include <linux/dm9000.h>
static struct resource s3c_dm9k_resource[] =
{
[0] =
{
.start = S3C2410_CS3, //网卡连接在CS3总线上
.end = S3C2410_CS3 + 3,
.flags = IORESOURCE_MEM,
},
[1] =
{
.start = S3C2410_CS3 + 4,
.end = S3C2410_CS3 + 4 + 3,
.flags = IORESOURCE_MEM,
},
[2] = {
.start = IRQ_EINT7,
.end = IRQ_EINT7,
.flags = IORESOURCE_IRQ | IRQF_TRIGGER_RISING,
}
};
static struct dm9000_plat_data s3c_dm9k_platdata =
{
.flags = DM9000_PLATF_16BITONLY,
};
struct platform_device s3c_device_dm9k =
{
.name = "dm9000",
.id = 0,
.num_resources = ARRAY_SIZE(s3c_dm9k_resource),
.resource = s3c_dm9k_resource,
.dev =
{
.platform_data = &s3c_dm9k_platdata,
}
};
EXPORT_SYMBOL(s3c_device_dm9k);
/*************************add bu dengwei***************************/
2)修改 arch/arm/mach-s3c2440/mach-smdk2440.c文件
修改struct platform_device *smdk2440_devices[] __initdata结构体增加以下代码:
static struct platform_device *smdk2440_devices[] __initdata =
{
&s3c_device_ohci,
&s3c_device_lcd,
&s3c_device_wdt,
&s3c_device_i2c0,
&s3c_device_iis,
&s3c_device_dm9k, //for dm9000 add by dengwei
};
3)修改以下文件 arch/arm/plat-s3c24xx/include/plat/s3c244x.h
extern struct platform_device s3c_device_dm9k; // add by dengwei
4)修改drivers/net/dm9000.c源码:
在头文件区增加头文件:
#include <mach/regs-mem.h>
大约1365行左右增加以下代码:
static int __devinit dm9000_probe(struct platform_device *pdev)
{
//add here
}
注意:添加在dm9000_probe函数的开头
/**********add by dengwei******************************************/
#if defined(CONFIG_ARCH_S3C2440)
int oldval_bwscon = *((volatile unsigned int *)S3C2410_BWSCON);
*((volatile unsigned int *)S3C2410_BWSCON)=(oldval_bwscon&~(3<<16))| S3C2410_BWSCON_DW3_16|S3C2410_BWSCON_WS3|S3C2410_BWSCON_ST3; //设置BANK3:总线宽度为16,使能nWAIT
*((volatile unsigned int *)S3C2410_BANKCON3) = 0x1f7c; //设置BANK3的时间参数
#endif
/**********add by dengwei*************************************************/
5)修改make menuconfig配置选项:
Devices Drivers --->
Network device support --->
Ethernet (10 or 100) --->
[*]DM9000 support
(4)DM9000 maxinum debug level
//仅保留这两个选项,其余的全部去掉
6)重新编译内核,烧入开发板中即可
7)第一次使用的开发板需使用 ifconfig eth0 hw ether 12:34:56:78:32:65 设置mac地址
(MAC地址可以随便设置)
使用ifconfig eth0 192.168.220.*设置开发板IP
使用ping命令ping主机即可
2、USB驱动(U盘支持)
配置内核对USB设备的支持,2.6.34内核中对USB设备的支持已经非常全面了
这里只需要按照以下配置 就可以了,配置完后重新编译内核烧到开发板上
1)、修改make menuconfig
SCSI device support --->
< > RAID Transport Class
<*> SCSI device support
< > SCSI target support
[*] legacy /proc/scsi/ support
*** SCSI support type (disk, tape, CD-ROM) ***
<*> SCSI disk support
< > SCSI tape support
< > SCSI OnStream SC-x0 tape support
< > SCSI CDROM support
<*> SCSI generic support
< > SCSI media changer support
[*] HID Devices --->
--- HID Devices
-*- Generic HID support
[ ] /dev/hidraw raw HID device support
*** USB Input Devices ***
<*> USB Human Interface Device (full HID) support
[ ] PID device support
[*] /dev/hiddev raw HID device support
[*] USB support --->
{*} Support for Host-side USB
[ ] USB verbose debug messages
[ ] USB announce new devices
*** Miscellaneous USB options ***
[*] USB device filesystem
[*] USB device class-devices (DEPRECATED)
<*> OHCI HCD support
<*> USB Mass Storage support
2)、插入U盘。
当系统启动后插入U盘就会出现一些信息,可以看到sda就是U盘设备了,sda1是U盘的一个分区。
mount /dev/sda1 /mnt/ -o utf8
utf8 参数可以识别中文
3、LCD
1)、修改 arch/arm/mach-s3c2440/mach-smdk2440.c 如下:
/* LCD driver info */
static struct s3c2410fb_display smdk2440_lcd_cfg __initdata = {
.lcdcon5 = S3C2410_LCDCON5_FRM565 |
// S3C2410_LCDCON5_INVVLINE |
// S3C2410_LCDCON5_INVVFRAME |
S3C2410_LCDCON5_PWREN |
S3C2410_LCDCON5_HWSWP,
.type = S3C2410_LCDCON1_TFT,
.width = 320,
.height = 240,
.pixclock = 64000, /* HCLK 60 MHz, divisor 10 */
.xres = 320,
.yres = 240,
.bpp = 16,
.left_margin = 18,
.right_margin = 38,
.hsync_len = 30,
.upper_margin = 18,
.lower_margin = 18,
.vsync_len = 3,
};
static struct s3c2410fb_mach_info smdk2440_fb_info __initdata = {
.displays = &smdk2440_lcd_cfg,
.num_displays = 1,
.default_display = 0,
#if 0
/* currently setup by downloader */
.gpccon = 0xaa940659,
.gpccon_mask = 0xffffffff,
.gpcup = 0x0000ffff,
.gpcup_mask = 0xffffffff,
.gpdcon = 0xaa84aaa0,
.gpdcon_mask = 0xffffffff,
.gpdup = 0x0000faff,
.gpdup_mask = 0xffffffff,
#endif
.gpccon = 0xaa955699, //这是将GPC和GPD设置成功能引脚,也可以不设置
.gpccon_mask = 0xffc003cc,
.gpcup = 0x0000ffff,
.gpcup_mask = 0xffffffff,
.gpdcon = 0xaa95aaa1,
.gpdcon_mask = 0xffc0fff0,
.gpdup = 0x0000faff,
.gpdup_mask = 0xffffffff,
//.lpcsel = ((0xCE6) & ~7) | 1<<4,
.lpcsel = 0xf82, //设置TCONSEL寄存器选择三星240x320
};
static struct platform_device *smdk2440_devices[] __initdata = {
&s3c_device_ohci,
&s3c_device_lcd, //检查这里有没有加上
&s3c_device_wdt,
&s3c_device_i2c0,
&s3c_device_iis,
&s3c_device_dm9k, //for dm9000 add by xiuhai.deng
};
a、如果要让系统启动起来看到 bootlogo 小企鹅,必须得在 make menuconfig 中进行配置添加
在 Device Drivers ---> Graphics support ---> Bootup logo下面可以全部选中支持
b、打开gimp号称 linux 下的 photoshop ,安装windows版(gimp-2.6.9-i686-setup.exe)
打开任何格式的一张将要转换的图片
选择:图像--->模式--->索引颜色转换--->最大颜色数量设置为(244)--->转换
还可以通过:图像--->缩放图像--->设置想要的图像大小
最后:文件--->另存为--->选择ppm格式--->保存格式为 ASCII
c、将转换好的图片拷贝到 drivers\video\logo 替换 logo_linux_clut224.ppm
并删除 logo_linux_clut224.c和logo_linux_clut224.o重新make zImage
d、且对于大多系统bootlogo图片的大小可以随便,且无需改动源码就可以显示
e、去掉10分钟后自动关屏问题:
在有一个 drivers/char/vt.c 文件其中有一个变量(blankinterval)可以设置它
来修改自动关屏的时间,也可以在函数(blank_screen_t)开头直接返回,这
样就永远不会关屏了
4、触模屏
1)、将 drivers/input/touchscreen/s3c2410_ts.c 换掉(在课件文件夹内)
2)、make menuconfig
Device Driver -->
Input device support -->
Touchscreens -->
[*]Samsung S3C2410 touchscreen input driver (它对应s3c2410_ts.c驱动)
5、UDA1341声卡驱动
1)、make menuconfig 声卡的配置是:
Device Drivers
<*>Sound card support
<*>Advanced Linux Sound Architecture --->(除这项外,其它全部不选中)
<*>Advanced Linux Sound Architecture (除了以下选项,其它均不选中)
<*> OSS Mixer API
<*> OSS PCM (digital audio) API
[*] OSS PCM (digital audio) API - Include plugin system
[*] Verbose procfs contents
<*>ALSA for Soc audio support(只选择下面两项)
<*>SoC Audio for the Samsung S3C24XX chips
<*>SoC I2S Audio support UDA134X wired to a S3C24XX
2)、配置声卡驱动
下面是我在mach-smdk2440.c上修改的地方:
…
#include <sound/s3c24xx_uda134x.h>
…
static struct s3c24xx_uda134x_platform_data s3c24xx_uda134x_data =
{
.l3_clk = S3C2410_GPG(10), //这三个引脚是跟据自己开发板的硬件连接决定的
.l3_data = S3C2410_GPG(9),
.l3_mode = S3C2410_GPG(11),
.model = UDA134X_UDA1341,
};
static struct platform_device s3c24xx_uda134x =
{
.name = "s3c24xx_uda134x",
.dev =
{
.platform_data = &s3c24xx_uda134x_data,
}
};
static struct platform_device *smdk2440_devices[] __initdata =
{
&s3c_device_usb,
&s3c_device_lcd,
&s3c_device_wdt,
&s3c_device_i2c0,
&s3c_device_iis,
&s3c_device_rtc,
&s3c24xx_uda134x,
};
…
3)、编译、下载
在内核目录下make zImage后将生成的内核文件烧写到开发板。
4)、测试
启动开发板后将已经拷贝歌曲的U盘插入到开发板的USB接口,挂载U盘后,运行”cat 01.mp3 > /dev/dsp”命令后听到音频耳机输出哧哧的声音,证明声卡驱动配置成功。
6、mmc/SD card driver
1)、arch/arm/mach-s3c2440/mach-smdk2440.c platform结构中增加&s3c_device_sdi语句。
static struct platform_device *smdk2440_devices[] __initdata =
{
&s3c_device_usb,
&s3c_device_lcd,
&s3c_device_wdt,
&s3c_device_i2c,
&s3c_device_iis,
&s3c_device_nand,
&s3c_device_sdi, //add here
};
在make menuconfig时选上所有关于sd卡的信息,要想支持中文还得选上:
Device Drivers --->
<*> MMC/SD/SDIO card support --->
--- MMC/SD/SDIO card support
[ ] MMC debugging
[ ] Allow unsafe resume (DANGEROUS)
*** MMC/SD/SDIO Card Drivers ***
<*> MMC block device driver
[*] Use bounce buffer for simple hosts
< > SDIO UART/GPS class support
< > MMC host test driver
*** MMC/SD/SDIO Host Controller Drivers ***
< > Secure Digital Host Controller Interface support
< > MMC/SD/SDIO over SPI
<*> Samsung S3C SD/MMC Card Interface support
File system--》
DOS/FAT/NT Filesystems--》
VFAT(Windows-95)fs support
(437)Default codepage for FAT
**把437改为936
Native language support -->
[*]Simplified Chinese charset
[*]NLS UTF-8
这样就可直接挂载了 mount -t vfat /dev/mmcblk0 /mnt
如果sd卡分区了 mount -t vfat /dev/mmcblk0p1 /mnt
直接读写sd就可以了
2)、爱普板子SD卡少接两根引脚,分别是检测SD卡插拔的中断引脚和SD卡写保护的引脚
所以插上SD卡后要重启才能起作用
相关文章:
-Linux ARM平台编程第五天-kernel配置(物联技术666))
嵌入式培训机构四个月实训课程笔记(完整版)-Linux ARM平台编程第五天-kernel配置(物联技术666)
链接:https://pan.baidu.com/s/1eb94AaDM-cIZsbr929Isbw?pwd1688 提取码:1688 上午:linux内核介绍 徐登伟老师 下午:linux的配置 教学内容: 一、基本kernel的制作: 1、去开源社区下载原…...

Java笔记(死锁、线程通信、单例模式)
一、死锁 1.概述 死锁 : 死锁是指两个或两个以上的进程在执行过程中,由于竞争资源或者由于彼此通信而造成的一种阻塞的现象,若无外力作用,它们都将无法往下执行。此时称系统处于死锁状态或系统产生了死锁,这些永远在互相等待的进…...
DAY11_(简易版)VUEElement综合案例
目录 1 VUE1.1 概述1.1.1 Vue js文件下载 1.2 快速入门1.3 Vue 指令1.3.1 v-bind & v-model 指令1.3.2 v-on 指令1.3.3 条件判断指令1.3.4 v-for 指令 1.4 生命周期1.5 案例1.5.1 需求1.5.2 查询所有功能1.5.3 添加功能 2 Element2.0 element-ui js和css和字体图标下载2.1 …...
【Kafka】开发实战和Springboot集成kafka
目录 消息的发送与接收生产者消费者 SpringBoot 集成kafka服务端参数配置 消息的发送与接收 生产者 生产者主要的对象有: KafkaProducer , ProducerRecord 。 其中 KafkaProducer 是用于发送消息的类, ProducerRecord 类用于封装Kafka的消息…...
初识C语言)
【C语言】(1)初识C语言
什么是C语言 C语言是一种广泛应用的计算机编程语言,它具有强大的功能和灵活性,使其成为系统编程和底层开发的首选语言。C语言的设计简洁、高效,且不依赖于特定的硬件或系统,因此在各种计算平台上都能稳定运行。 C语言的特点 高…...
)
SpringCloudStream整合MQ(待完善)
概念 Spring Cloud Stream 的主要目标是各种各样MQ的学习成本,提供一致性的编程模型,使得开发者能够更容易地集成消息组件(如 Apache Kafka、RabbitMQ、RocketMQ) 官网地址:Spring Cloud Stream 组件 1. Binder 2…...
【Java 数据结构】包装类简单认识泛型
包装类&简单认识泛型 1 包装类1.1 基本数据类型和对应的包装类1.2 装箱和拆箱1.3 自动装箱和自动拆箱 2 什么是泛型3 引出泛型3.1 语法 4 泛型类的使用4.1 语法4.2 示例4.3 类型推导(Type Inference) 5 泛型如何编译的5.1 擦除机制5.2 为什么不能实例化泛型类型数组 6 泛型…...
第139期 做大还是做小-Oracle名称哪些事(20240125)
数据库管理139期 2024-01-25 第139期 做大还是做小-Oracle名称哪些事(20240125)1 问题2 排查3 扩展总结 第139期 做大还是做小-Oracle名称哪些事(20240125) 作者:胖头鱼的鱼缸(尹海文) Oracle A…...

驱动开发--多路复用-信号
一、多路复用 每个进程都有一个描述符数组,这个数组的下标为描述符, 描述符的分类: 文件描述符:设备文件、管道文件 socket描述符 1.1 应用层:三套接口select、poll、epoll select:位运算实现 监控的描…...

LeetCode 2859. 计算 K 置位下标对应元素的和【位操作】1000
本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章…...
composer安装hyperf后,nginx配置hyperf
背景 引入hyperf项目用作微服务,使用composer 安装hyperf后,对hyperf进行nginx配置。 配置步骤 因为hyperf监听的是端口,不像其他laravel、lumen直接指向文件即可。所有要监听端口号。 1 配置nginx server {listen 80;//http:…...

Flink对接Kafka的topic数据消费offset设置参数
scan.startup.mode 是 Flink 中用于设置消费 Kafka topic 数据的起始 offset 的配置参数之一。 scan.startup.mode 可以设置为以下几种模式: earliest-offset:从最早的 offset 开始消费数据。latest-offset:从最新的 offset 开始消费数据。…...
TryHackMe-Umbrella
靶场介绍 Breach Umbrella Corp’s time-tracking server by exploiting misconfigurations around containerisation. 利用集装箱化的错误配置,破坏Umbrella公司的时间跟踪服务器。 Task 1 What is the DB password? 数据库的密码是多少? 端口扫描&am…...
Excel导出警告:文件格式和拓展名不匹配
原因描述: Content-Type 原因:Content-Type,即内容类型,一般是指网页中存在的Content-Type,用于定义网络文件的类型和网页的编码,决定文件接收方将以什么形式、什么编码读取这个文件,这就是经常…...
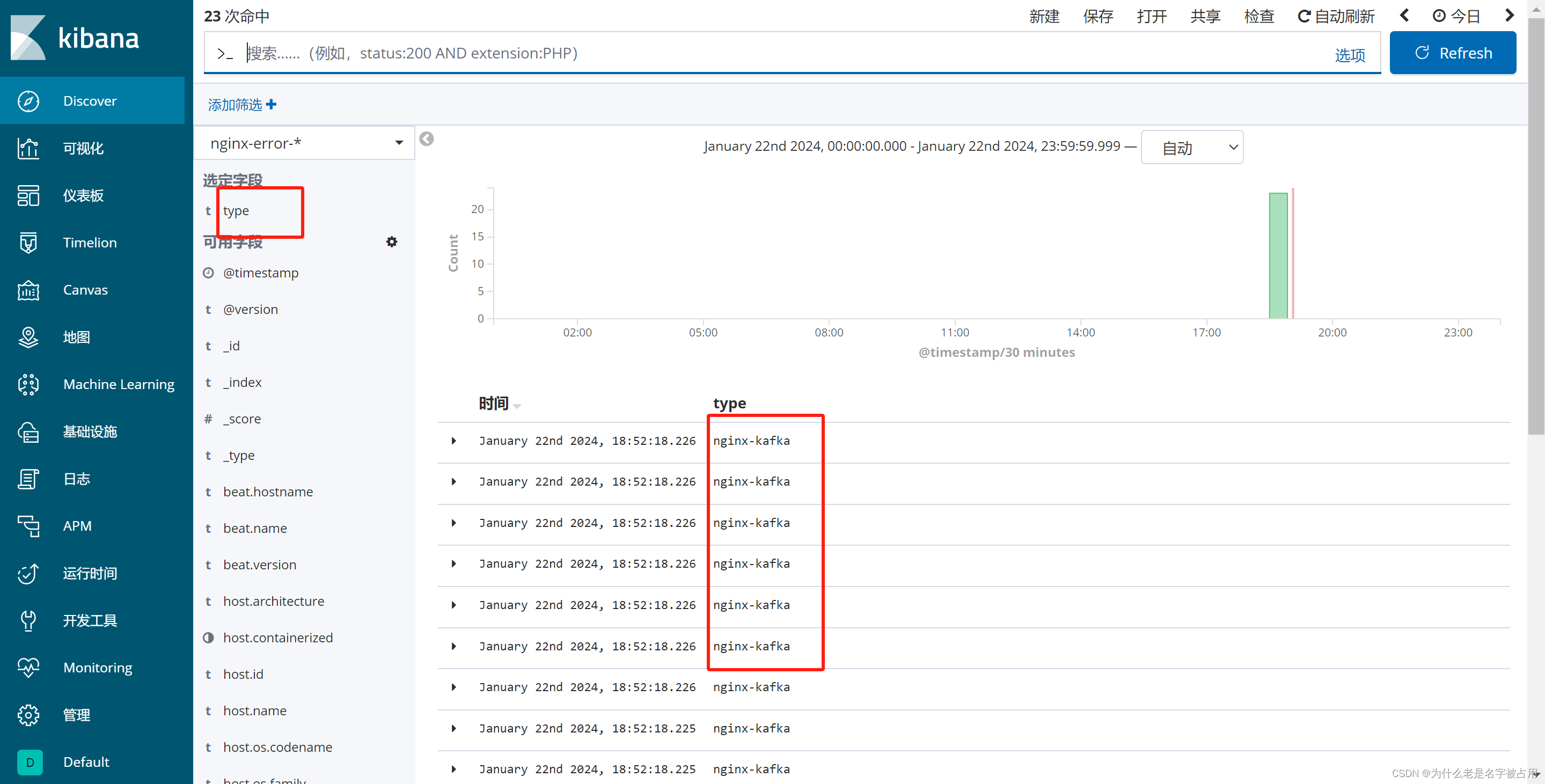
kafka集群和Filebeat+Kafka+ELK
一、Kafka 概述 1.1 为什么需要消息队列(MQ) 主要原因是由于在高并发环境下,同步请求来不及处理,请求往往会发生阻塞。比如大量的请求并发访问数据库,导致行锁表锁,最后请求线程会堆积过多,从…...

golang map真有那么随机吗?——map遍历研究
在随机选取map中元素时,本想用map遍历的方式来返回,但是却并没有通过测试。 那么难道map的遍历并不是那么的随机吗? 以下代码参考go1.18 hiter是map遍历的结构,主要记录了当前遍历的元素、开始位置等来完成整个遍历过程 // A ha…...

详细分析对比copliot和ChatGPT的差异
Copilot 和 ChatGPT 是两种不同的AI工具,分别在不同领域展现出了强大的功能和潜力: GitHub Copilot 定位与用途:GitHub Copilot 是由GitHub(现为微软子公司)和OpenAI合作开发的一款智能代码辅助工具。它主要集成于Visu…...

TENT:熵最小化的Fully Test-Time Adaption
摘要 在测试期间,模型必须自我调整以适应新的和不同的数据。在这种完全自适应测试时间的设置中,模型只有测试数据和它自己的参数。我们建议通过test entropy minimization (tent[1])来适应:我们通过其预测的熵来优化模型的置信度。我们的方法估计归一化…...
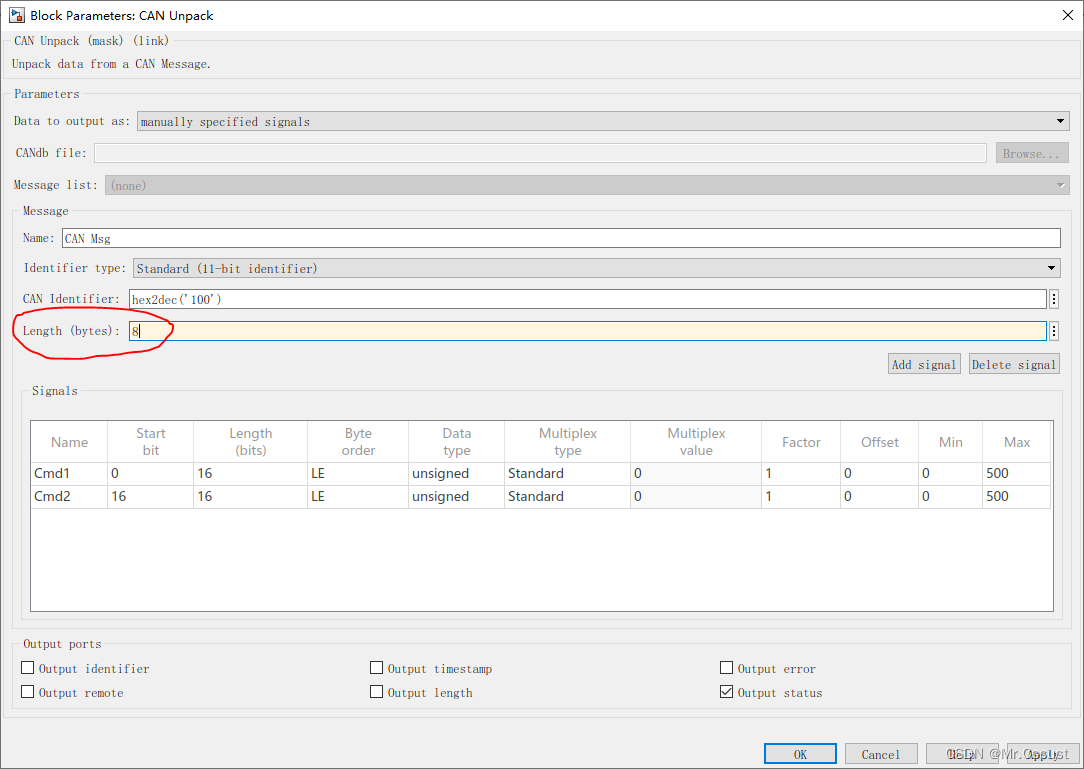
研发日记,Matlab/Simulink避坑指南(五)——CAN解包 DLC Bug
文章目录 前言 背景介绍 问题描述 分析排查 解决方案 总结 前言 见《研发日记,Matlab/Simulink避坑指南(一)——Data Store Memory模块执行时序Bug》 见《研发日记,Matlab/Simulink避坑指南(二)——非对称数据溢出Bug》 见《…...

机器人3D视觉引导半导体塑封上下料
半导体塑封上下料是封装工艺中的重要环节,直接影响到产品的质量和性能。而3D视觉引导技术的引入,使得这一过程更加高效、精准。它不仅提升了生产效率,减少了人工操作的误差,还为半导体封装技术的智能化升级奠定了坚实的基础。 传统…...
)
Java 语言特性(面试系列2)
一、SQL 基础 1. 复杂查询 (1)连接查询(JOIN) 内连接(INNER JOIN):返回两表匹配的记录。 SELECT e.name, d.dept_name FROM employees e INNER JOIN departments d ON e.dept_id d.dept_id; 左…...

Linux 文件类型,目录与路径,文件与目录管理
文件类型 后面的字符表示文件类型标志 普通文件:-(纯文本文件,二进制文件,数据格式文件) 如文本文件、图片、程序文件等。 目录文件:d(directory) 用来存放其他文件或子目录。 设备…...
)
云计算——弹性云计算器(ECS)
弹性云服务器:ECS 概述 云计算重构了ICT系统,云计算平台厂商推出使得厂家能够主要关注应用管理而非平台管理的云平台,包含如下主要概念。 ECS(Elastic Cloud Server):即弹性云服务器,是云计算…...
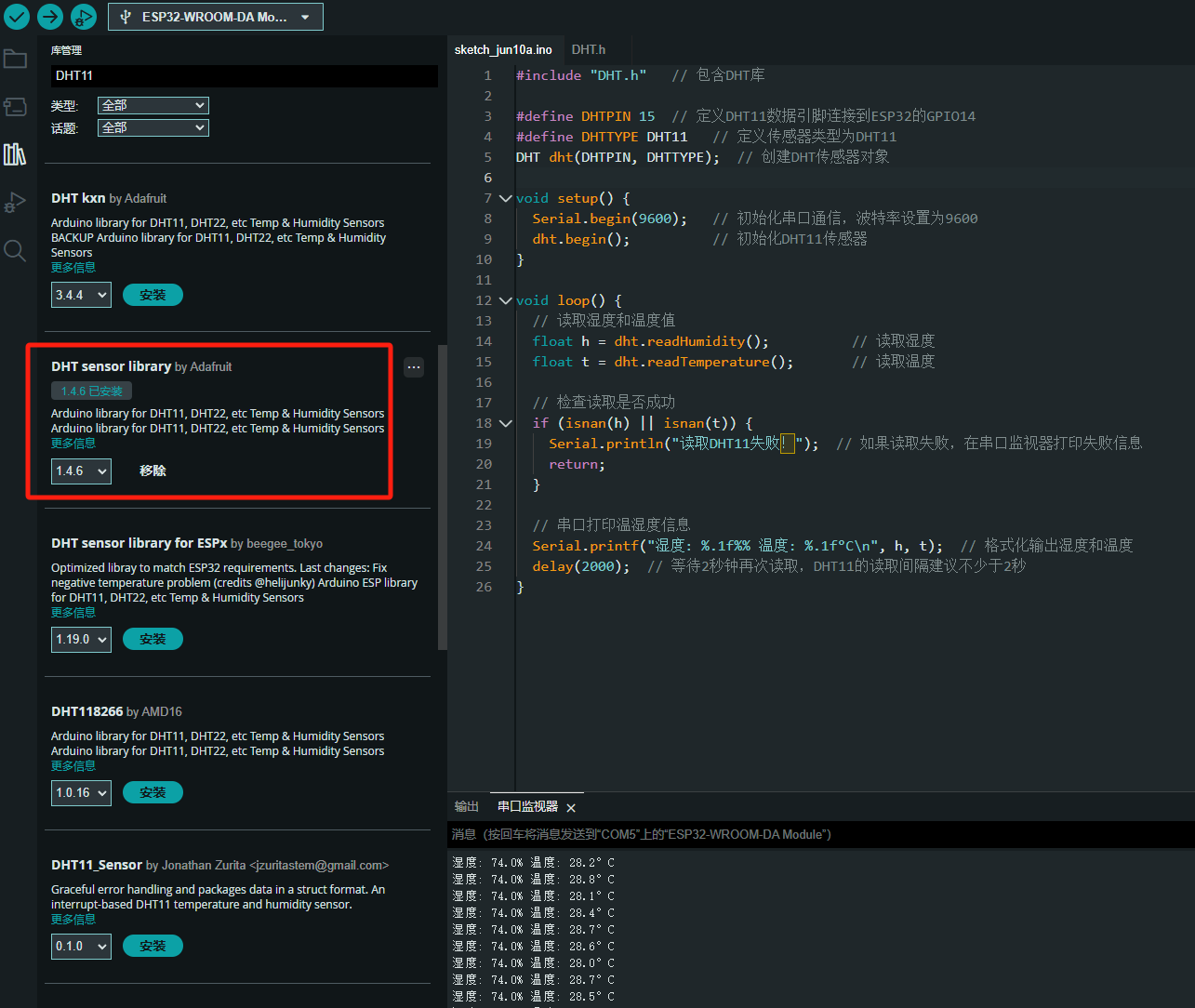
ESP32读取DHT11温湿度数据
芯片:ESP32 环境:Arduino 一、安装DHT11传感器库 红框的库,别安装错了 二、代码 注意,DATA口要连接在D15上 #include "DHT.h" // 包含DHT库#define DHTPIN 15 // 定义DHT11数据引脚连接到ESP32的GPIO15 #define D…...
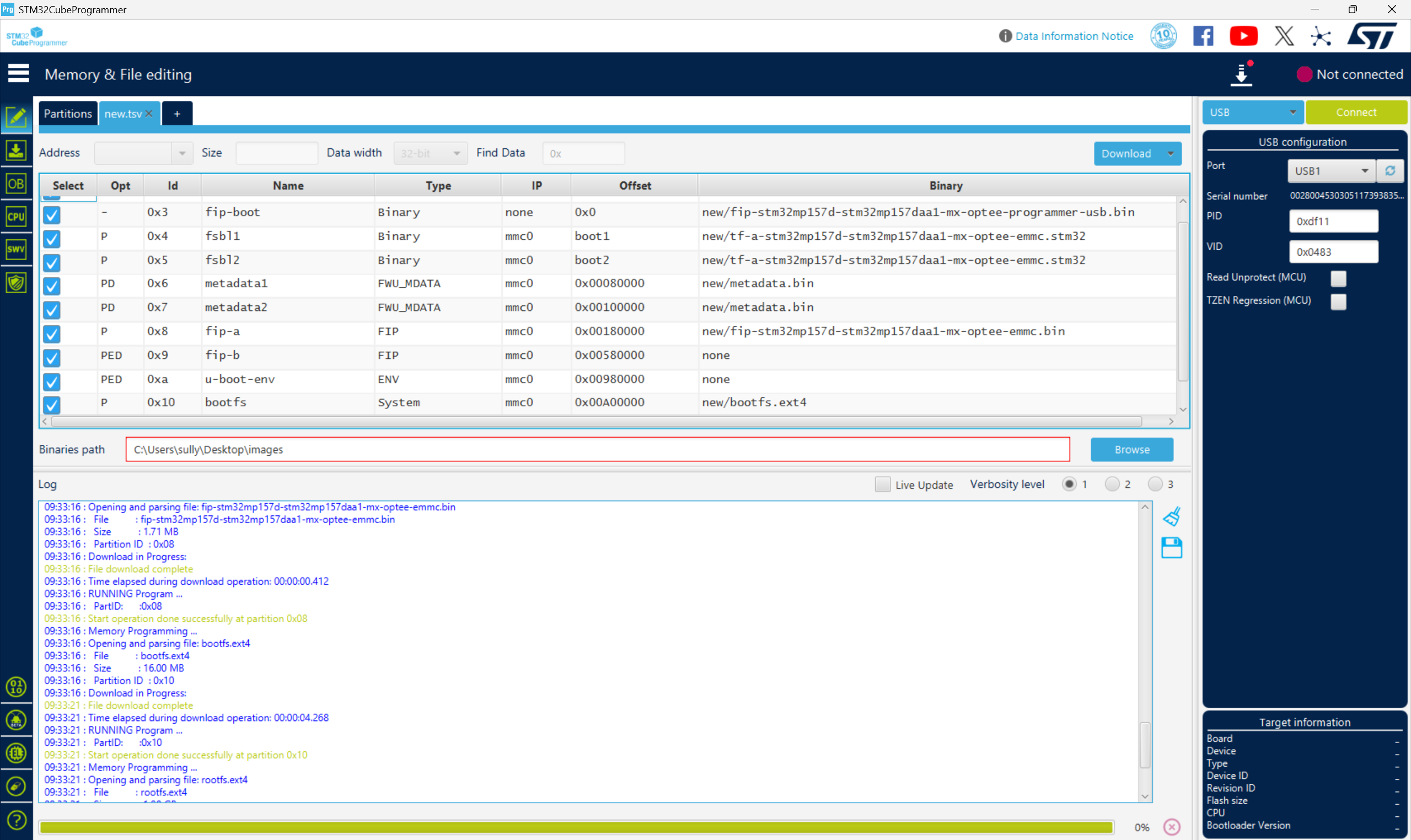
从零开始打造 OpenSTLinux 6.6 Yocto 系统(基于STM32CubeMX)(九)
设备树移植 和uboot设备树修改的内容同步到kernel将设备树stm32mp157d-stm32mp157daa1-mx.dts复制到内核源码目录下 源码修改及编译 修改arch/arm/boot/dts/st/Makefile,新增设备树编译 stm32mp157f-ev1-m4-examples.dtb \stm32mp157d-stm32mp157daa1-mx.dtb修改…...

JDK 17 新特性
#JDK 17 新特性 /**************** 文本块 *****************/ python/scala中早就支持,不稀奇 String json “”" { “name”: “Java”, “version”: 17 } “”"; /**************** Switch 语句 -> 表达式 *****************/ 挺好的ÿ…...

CRMEB 框架中 PHP 上传扩展开发:涵盖本地上传及阿里云 OSS、腾讯云 COS、七牛云
目前已有本地上传、阿里云OSS上传、腾讯云COS上传、七牛云上传扩展 扩展入口文件 文件目录 crmeb\services\upload\Upload.php namespace crmeb\services\upload;use crmeb\basic\BaseManager; use think\facade\Config;/*** Class Upload* package crmeb\services\upload* …...
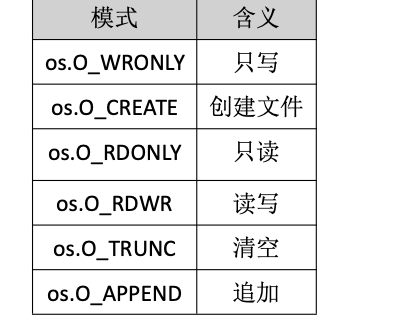
Golang——9、反射和文件操作
反射和文件操作 1、反射1.1、reflect.TypeOf()获取任意值的类型对象1.2、reflect.ValueOf()1.3、结构体反射 2、文件操作2.1、os.Open()打开文件2.2、方式一:使用Read()读取文件2.3、方式二:bufio读取文件2.4、方式三:os.ReadFile读取2.5、写…...

HubSpot推出与ChatGPT的深度集成引发兴奋与担忧
上周三,HubSpot宣布已构建与ChatGPT的深度集成,这一消息在HubSpot用户和营销技术观察者中引发了极大的兴奋,但同时也存在一些关于数据安全的担忧。 许多网络声音声称,这对SaaS应用程序和人工智能而言是一场范式转变。 但向任何技…...

Neko虚拟浏览器远程协作方案:Docker+内网穿透技术部署实践
前言:本文将向开发者介绍一款创新性协作工具——Neko虚拟浏览器。在数字化协作场景中,跨地域的团队常需面对实时共享屏幕、协同编辑文档等需求。通过本指南,你将掌握在Ubuntu系统中使用容器化技术部署该工具的具体方案,并结合内网…...