opencv C++ dnn模块调用yolov5以及Intel RealSense D435深度相机联合使用进行目标检测
一、代码
#include <opencv2/opencv.hpp>
#include <opencv2/dnn/dnn.hpp>
#include <librealsense2/rs.hpp> // Include RealSense Cross Platform APIusing namespace cv;
using namespace dnn;
using namespace std;
using namespace rs2;// 类名数组,这里需要替换为实际YOLO模型所检测的对象的类名
const char* classNames[] = {"object1", "object2", "object3", "object4"};int main(int argc, char** argv)
{// 模型权重和配置文件路径,这些文件包含了训练好的YOLO模型参数和网络配置String model = "yolov8.onnx"; // 替换为实际模型文件路径// 加载预训练的模型和配置到DNN网络中Net net = readNetFromONNX(model);// 设置推理引擎后端为OpenCV,目标设备为CPUnet.setPreferableBackend(DNN_BACKEND_OPENCV);net.setPreferableTarget(DNN_TARGET_CPU);// Declare depth colorizer for pretty visualization of depth datacolorizer color_map;// Declare RealSense pipeline, encapsulating the actual device and sensorspipeline p;// Start streaming with default recommended configurationp.start();// 循环直到用户按下键盘上的任意键while (waitKey(1) < 0) {// Wait for the next set of frames from the cameraframeset frames = p.wait_for_frames();// Get a frame from the RGB cameraframe color = frames.get_color_frame();// Create OpenCV matrix of size (color_height, color_width)Mat frame(Size(640, 480), CV_8UC3, (void*)color.get_data(), Mat::AUTO_STEP);Mat blob; // 用于存储处理后的图像,以适应网络输入// 将帧图像转换为网络输入所需格式blobFromImage(frame, blob, 1/255.0, cv::Size(416, 416), Scalar(0,0,0), true, false);// 将blob设置为网络的输入net.setInput(blob);// 运行前向传递以获取网络的输出层vector<Mat> outs;net.forward(outs, net.getUnconnectedOutLayersNames());// 遍历网络输出的每一层结果for (size_t i = 0; i < outs.size(); ++i) {for (int j = 0; j < outs[i].rows; ++j) {Mat scores = outs[i].row(j).colRange(5, outs[i].cols);Point classIdPoint;double confidence;minMaxLoc(scores, 0, &confidence, 0, &classIdPoint);if (confidence > 0.5) {int centerX = (int)(outs[i].at<float>(j, 0) * frame.cols);int centerY = (int)(outs[i].at<float>(j, 1) * frame.rows);int width = (int)(outs[i].at<float>(j, 2) * frame.cols);int height = (int)(outs[i].at<float>(j, 3) * frame.rows);int left = centerX - width / 2;int top = centerY - height / 2;rectangle(frame, Rect(left, top, width, height), Scalar(0, 255, 0), 2);int classIdx = static_cast<int>(classIdPoint.x);string classLabel = string(classNames[classIdx]);string label = classLabel + ":" + format("%.2f", confidence);int baseLine;Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);top = max(top, labelSize.height);rectangle(frame, Point(left, top - labelSize.height), Point(left + labelSize.width, top + baseLine), Scalar::all(255), FILLED);putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0,0,0));}}}// 展示处理后的帧imshow("YoloV8", frame);}return 0;
}
注意:由于手头上没有该摄像头,本人只是查询资料,以及文档之后写的代码,并没有实操
二、安装包
需要安装opencv、librealsense2库
链接:Intel.RealSense.SDK.zip资源-CSDN文库
相关文章:

opencv C++ dnn模块调用yolov5以及Intel RealSense D435深度相机联合使用进行目标检测
一、代码 #include <opencv2/opencv.hpp> #include <opencv2/dnn/dnn.hpp> #include <librealsense2/rs.hpp> // Include RealSense Cross Platform APIusing namespace cv; using namespace dnn; using namespace std; using namespace rs2;// 类名数组&am…...
2024牛客寒假算法基础集训营1(视频讲解全部题目)
2024牛客寒假算法基础集训营1(题目全解) ABCDEFGHIJKLM 2024牛客寒假算法基础集训营1(视频讲解全部题目) A #include<bits/stdc.h> #define endl \n #define deb(x) cout << #x << " " << …...

第三百一十三回
文章目录 1. 概念介绍2. 实现方法2.1 obscureText属性2.2 decoration属性 3. 示例代码4. 内容总结 我们在上一章回中介绍了"如何实现倒计时功能"相关的内容,本章回中将介绍如何实现密码输入框.闲话休提,让我们一起Talk Flutter吧。 1. 概念介绍…...
倒计时61天
M-智乃的36倍数(normal version)_2024牛客寒假算法基础集训营3 (nowcoder.com) //非ac代码,超时了,54.17/100#include<bits/stdc.h> using namespace std; const int N1e55; const int inf0x3f3f3f3f; #define int long long int n; string s1[N]; void solve() {cin>…...
)
npm后Truffle找不到命令(ubantu20系统)
Truffle找不到命令 方法1方法2 方法1 # 编辑.profile vim ~/.profile # 在.profile末尾把nodejs的解压路径添加到$PATH环境变量中 PATH"$HOME/bin:$HOME/.local/bin:路径:$PATH" source 文件方法2 #ls -l 在nodejs的bin目录下查看truffle链接的脚本文件 truffle -&…...
嵌入式学习第三篇——51单片机
目录 1,嵌入式系统 1,嵌入式系统的定义 2,单片机的定义 2,51单片机 1,开发环境 2,开发板使用的基本思路 1,查看原理图,查看芯片手册 2,获得调用硬件的管…...
RabbitMQ详解
RabbitMQ 1.初识MQ 1.1.同步和异步通讯 微服务间通讯有同步和异步两种方式: 同步通讯:就像打电话,需要实时响应。 异步通讯:就像发邮件,不需要马上回复。 两种方式各有优劣,打电话可以立即得到响应&a…...

CGAL::2D Arrangements-4
4. Free函数 Arrangement_on_surface_2类模板是用曲线切分二维的面。因为它的接口设计是最简化的,这意味着它的成员函数很少执行几何操作。本章将解释怎么利用这些Free function来达到Arrangement操作。执行这些操作通常需要优秀的几何算法,而且有时会对…...
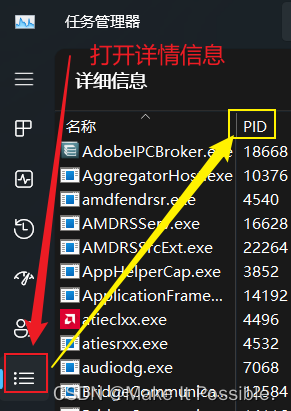
终端命令提示符:如何查看我们电脑端口是否被占用和处理方式
文章目录 端口信息查看1、Windows:2、Linux/macOS: 使用 netstat使用 lsof 端口信息查看 在不同的操作系统中,查看端口是否被占用的指令有所不同。以下是一些常见的指令: 1、Windows: 使用命令行工具 netstat 来查看端口占用情况。 电脑键盘按住 win…...
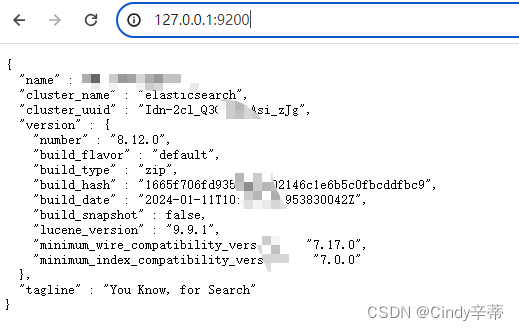
elasticsearch重置密码操作
安装es的时候需要测试这个url:http://127.0.0.1:9200/ 出现弹窗让我输入账号和密码。我第一次登录,没有设置过账号和密码, 解决方法是:在es的bin目录下打开cmd窗口,敲命令:.\elasticsearch-reset-password…...
—— 导航)
从零开始手写mmo游戏从框架到爆炸(零)—— 导航
从今天开始我们尝试从零开始写一个mmo的游戏。主要技术还是netty。参考了网上很多的大神的框架,本来希望基于ioGame或者vert.x等来直接写功能的,觉得从零开始更有意义,而且咱们也不需要太NB的底层功能,够用就行。 下面是导航&…...
)
机器学习7-K-近邻算法(K-NN)
K-Nearest Neighbors(K-近邻算法,简称KNN)是一种基本的监督学习算法,用于解决分类和回归问题。KNN的核心思想是基于距离度量,在特征空间中找到最近的K个样本,然后使用它们的标签进行决策。以下是KNN的基本概…...
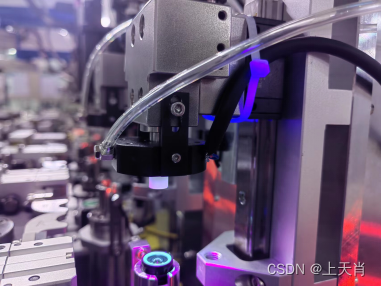
相机图像质量研究(7)常见问题总结:光学结构对成像的影响--镜片固化
系列文章目录 相机图像质量研究(1)Camera成像流程介绍 相机图像质量研究(2)ISP专用平台调优介绍 相机图像质量研究(3)图像质量测试介绍 相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距 相机图像质量研究(5)常见问题总结:光学结构对成…...

猫头虎分享已解决Bug || Go Error: cannot convert int to string
博主猫头虎的技术世界 🌟 欢迎来到猫头虎的博客 — 探索技术的无限可能! 专栏链接: 🔗 精选专栏: 《面试题大全》 — 面试准备的宝典!《IDEA开发秘籍》 — 提升你的IDEA技能!《100天精通鸿蒙》 …...

前端bug手册
JavaScript错误:常见的JavaScript错误包括语法错误、未定义的变量、类型错误等。这些错误可能导致页面无法正常运行或功能无法正常使用。样式问题:前端开发中常见的样式问题包括布局错乱、元素位置不正确、样式覆盖等。这些问题可能导致页面显示不正常或…...

Elasticsearch中Document Routing特性
Document Routing在Elasticsearch中是一种高级特性,它允许用户在索引文档时指定一个路由值。通过这种方式,可以确保具有相同路由值的所有文档都存储在同一个分片中。这对于提高查询效率特别有用,因为它允许查询只针对包含相关文档的特定分片&…...

【Git版本控制 03】远程操作
目录 一、克隆远程仓库 二、推送远程仓库 三、拉取远程仓库 四、忽略特殊文件 五、命令配置别名 一、克隆远程仓库 Git是分布式版本控制系统,同⼀个Git仓库,可以分布到不同的机器上。怎么分布呢? 找⼀台电脑充当服务器的⻆⾊ÿ…...
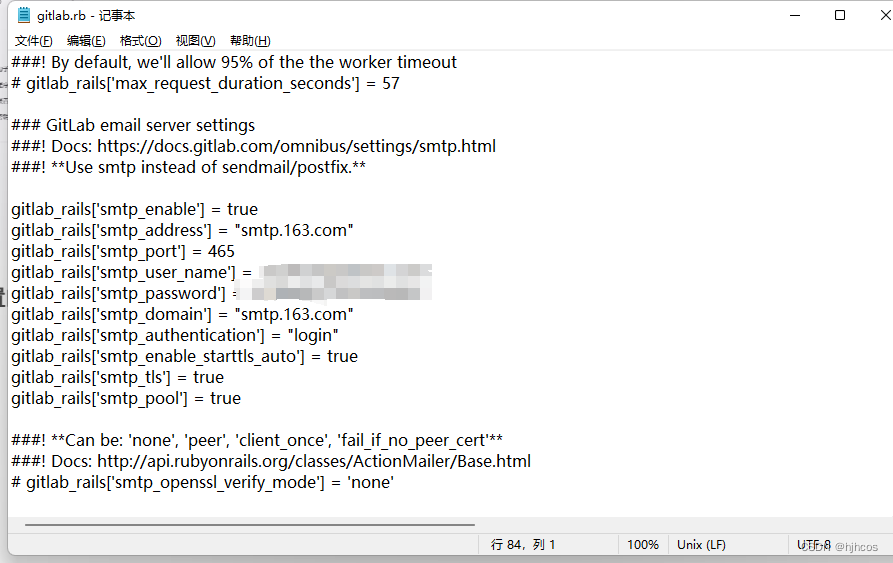
【Git】Windows下通过Docker安装GitLab
私有仓库 前言基本思路拉取镜像创建挂载目录创建容器容器启动成功登录仓库设置中文更改密码人员审核配置邮箱 前言 由于某云存在人数限制,这个其实很好理解,毕竟使用的是云服务器,人家也是要交钱的。把代码完全放在别人的服务器上面…...

flutter 操作mysql
引入模块 dependencies: flutter: sdk: flutter mysql1: ^0.20.0 mysql helper 的代码 import dart:async; import package:mysql1/mysql1.dart; class MySqlHelper { static const _host localhost; static const _port 3333; static const _user user; static c…...
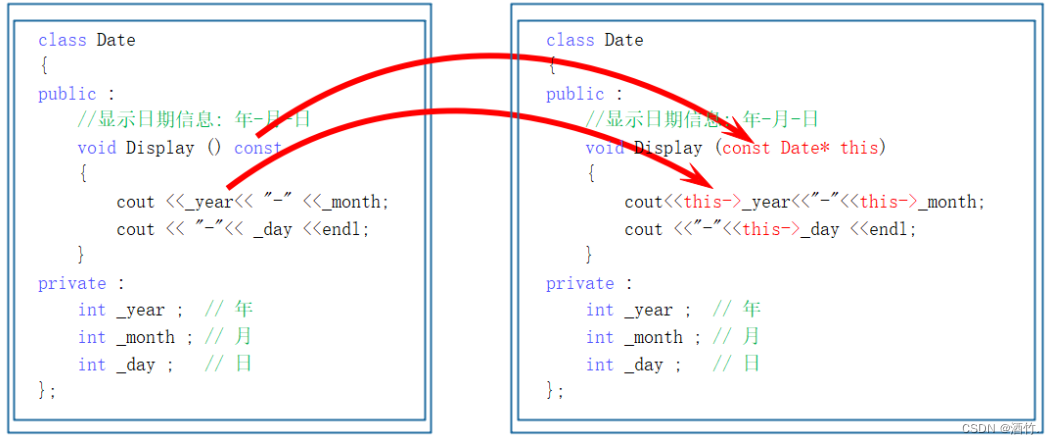
c++阶梯之类与对象(中)< 续集 >
前文: c阶梯之类与对象(上)-CSDN博客 c阶梯之类与对象(中)-CSDN博客 前言: 在上文中,我们学习了类的六个默认成员函数之构造,析构与拷贝构造函数,接下来我们来看看剩下…...

DeepSeek 赋能智慧能源:微电网优化调度的智能革新路径
目录 一、智慧能源微电网优化调度概述1.1 智慧能源微电网概念1.2 优化调度的重要性1.3 目前面临的挑战 二、DeepSeek 技术探秘2.1 DeepSeek 技术原理2.2 DeepSeek 独特优势2.3 DeepSeek 在 AI 领域地位 三、DeepSeek 在微电网优化调度中的应用剖析3.1 数据处理与分析3.2 预测与…...
)
rknn优化教程(二)
文章目录 1. 前述2. 三方库的封装2.1 xrepo中的库2.2 xrepo之外的库2.2.1 opencv2.2.2 rknnrt2.2.3 spdlog 3. rknn_engine库 1. 前述 OK,开始写第二篇的内容了。这篇博客主要能写一下: 如何给一些三方库按照xmake方式进行封装,供调用如何按…...
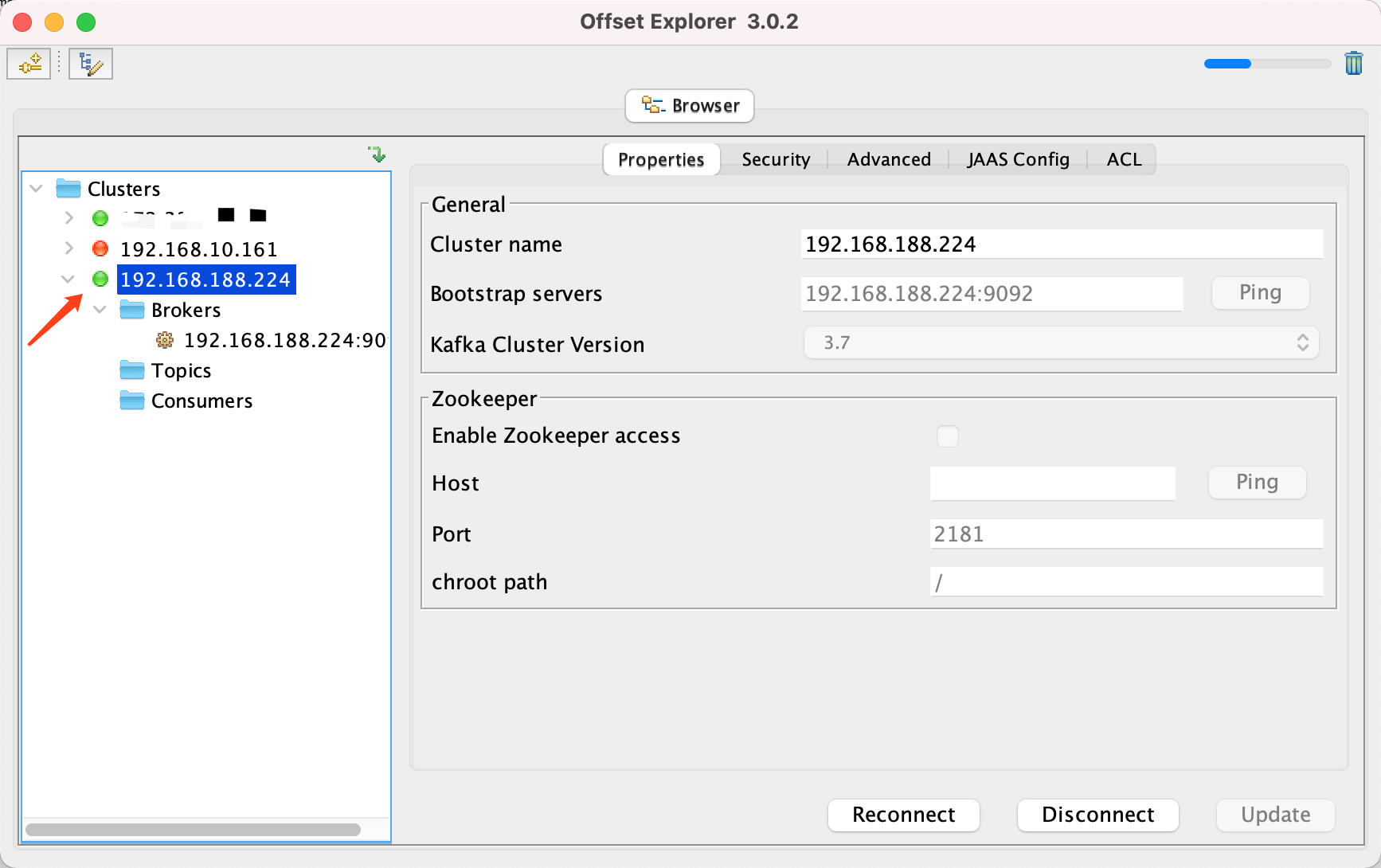
Docker 运行 Kafka 带 SASL 认证教程
Docker 运行 Kafka 带 SASL 认证教程 Docker 运行 Kafka 带 SASL 认证教程一、说明二、环境准备三、编写 Docker Compose 和 jaas文件docker-compose.yml代码说明:server_jaas.conf 四、启动服务五、验证服务六、连接kafka服务七、总结 Docker 运行 Kafka 带 SASL 认…...
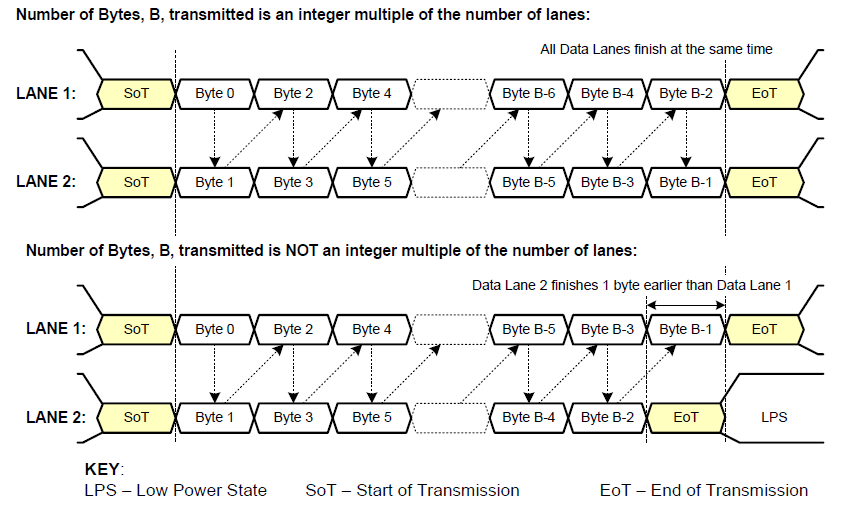
《从零掌握MIPI CSI-2: 协议精解与FPGA摄像头开发实战》-- CSI-2 协议详细解析 (一)
CSI-2 协议详细解析 (一) 1. CSI-2层定义(CSI-2 Layer Definitions) 分层结构 :CSI-2协议分为6层: 物理层(PHY Layer) : 定义电气特性、时钟机制和传输介质(导线&#…...

在 Nginx Stream 层“改写”MQTT ngx_stream_mqtt_filter_module
1、为什么要修改 CONNECT 报文? 多租户隔离:自动为接入设备追加租户前缀,后端按 ClientID 拆分队列。零代码鉴权:将入站用户名替换为 OAuth Access-Token,后端 Broker 统一校验。灰度发布:根据 IP/地理位写…...
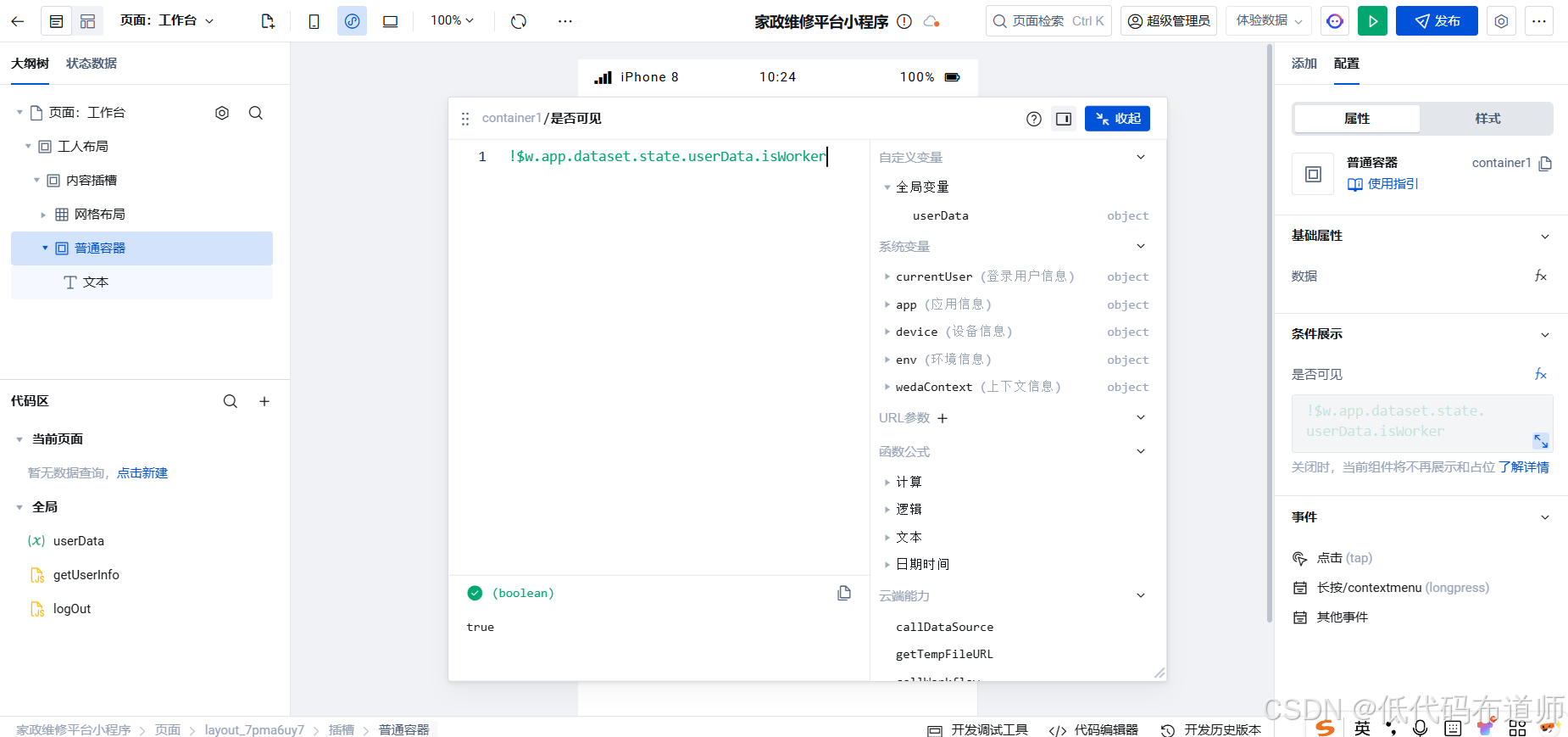
家政维修平台实战20:权限设计
目录 1 获取工人信息2 搭建工人入口3 权限判断总结 目前我们已经搭建好了基础的用户体系,主要是分成几个表,用户表我们是记录用户的基础信息,包括手机、昵称、头像。而工人和员工各有各的表。那么就有一个问题,不同的角色…...

解决本地部署 SmolVLM2 大语言模型运行 flash-attn 报错
出现的问题 安装 flash-attn 会一直卡在 build 那一步或者运行报错 解决办法 是因为你安装的 flash-attn 版本没有对应上,所以报错,到 https://github.com/Dao-AILab/flash-attention/releases 下载对应版本,cu、torch、cp 的版本一定要对…...
混合(Blending))
C++.OpenGL (20/64)混合(Blending)
混合(Blending) 透明效果核心原理 #mermaid-svg-SWG0UzVfJms7Sm3e {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-SWG0UzVfJms7Sm3e .error-icon{fill:#552222;}#mermaid-svg-SWG0UzVfJms7Sm3e .error-text{fill…...
【JVM面试篇】高频八股汇总——类加载和类加载器
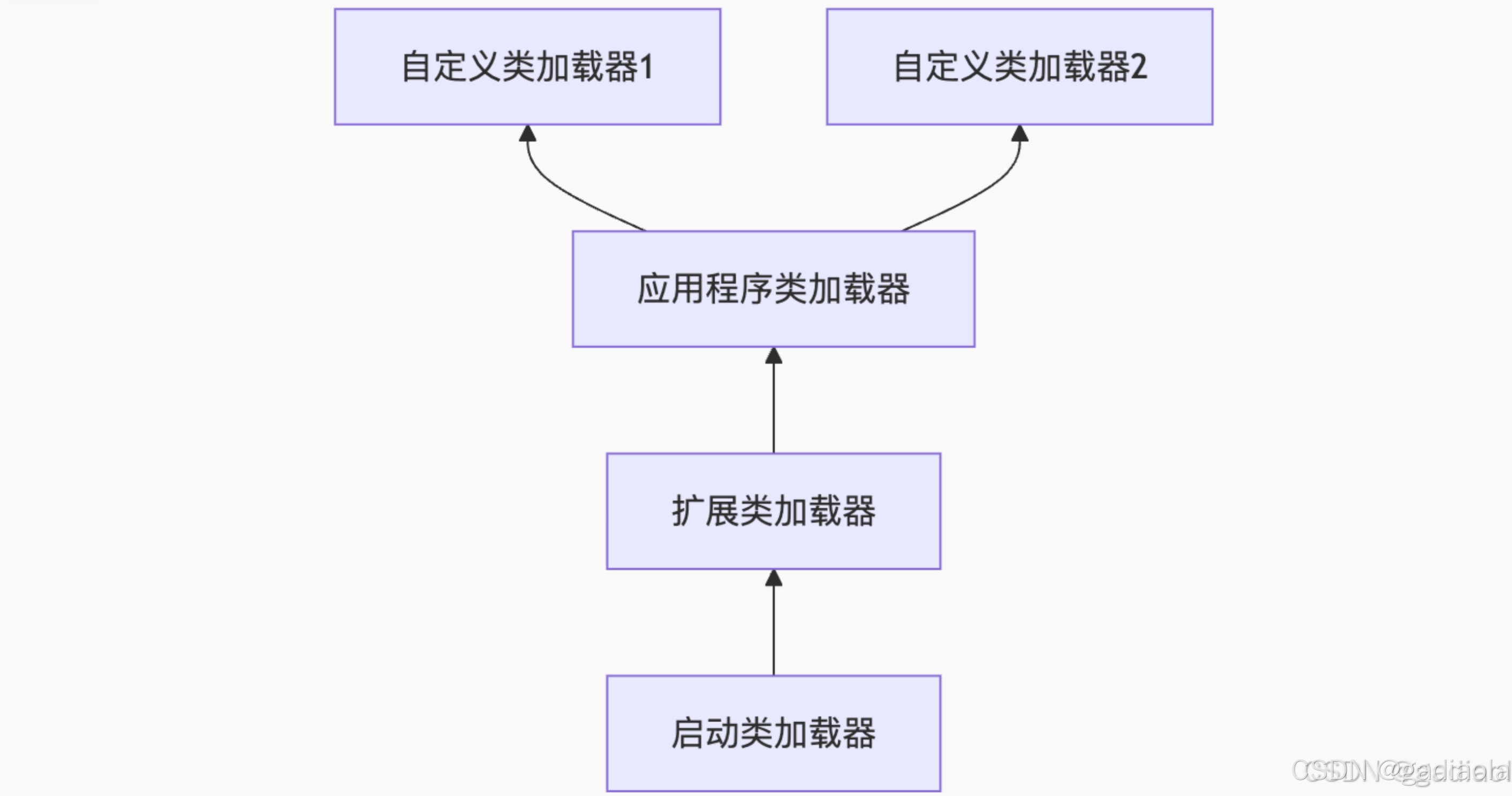
目录 1. 讲一下类加载过程? 2. Java创建对象的过程? 3. 对象的生命周期? 4. 类加载器有哪些? 5. 双亲委派模型的作用(好处)? 6. 讲一下类的加载和双亲委派原则? 7. 双亲委派模…...

MySQL JOIN 表过多的优化思路
当 MySQL 查询涉及大量表 JOIN 时,性能会显著下降。以下是优化思路和简易实现方法: 一、核心优化思路 减少 JOIN 数量 数据冗余:添加必要的冗余字段(如订单表直接存储用户名)合并表:将频繁关联的小表合并成…...