qt学习:arm摄像头+c调用v412框架驱动+qt调用v412框架驱动 显示摄像头画面
目录
跟内核进行数据通信的函数
编程步骤
c代码
头文件
打开摄像头文件 /dev/videox
获取当前主机上(开发板)摄像头列表信息
设置当前摄像头的画面格式 比如说 设置 采集图像的宽度为640 高度 480
在内核空间中,申请一个缓冲区队列(队列中有4块缓冲区)
将申请好的缓冲区队列 映射到 用户空间中
开启摄像头
采集数据 yuyv
将采集出来的yuyv格式的数据---转换成 rgb
将c代码移植到qt代码中,在qt的界面显示摄像头画面
MCamera摄像头类添加头文件,成员,函数接口
实现MCamera摄像头类函数接口
在主ui界面类加入头文件,成员,函数接口
在构造函数中初始化摄像头类和定时器类,并关联定时器的槽函数
开启摄像头按钮点击事件
关闭摄像头按钮点击事件
拍照按钮点击事件
定时器槽函数实现
qt由于在arm qt版本下,没有多媒体库,所以,arm qt程序要访问摄像头,那么必须要使用linux操作系统v412(video for linux 2)机制
简单来说就是要在arm上安装v412框架就可以使用摄像头
跟内核进行数据通信的函数
#include <stropts.h>
int ioctl(int fildes,int request,.../* arg */);
- 第一个参数:fd文件描述符
- 第二个参数:要发送的命令
- VIDIOC_REQBUFS:分配内存
- VIDIOC_QUERYBUF:把 VIDIOC_REQBUFS 中分配的数据缓存转换成物理地址
- VIDIOC_QUERYCAP:查询驱动功能
- VIDIOC_ENUM_FMT:获取当前驱动支持的视频格式
- VIDIOC_S_FMT:设置当前驱动的频捕获格式
- VIDIOC_G_FMT:读取当前驱动的频捕获格式
- VIDIOC_TRY_FMT:验证当前驱动的显示格式
- VIDIOC_CROPCAP:查询驱动的修剪能力
- VIDIOC_S_CROP:设置视频信号的边框
- VIDIOC_G_CROP:读取视频信号的边框
- VIDIOC _QBUF:把数据放回缓存队列
- VIDIOC_DQBUF:把数据从缓存中读取出来
- VIDIOC_$TREAMON:开始视频显示函数
- VIDIOC_STREAMOFF:结束视频显示函数
- VIDIOC_QUERYSTD:检查当前视频设备支持的标准,例如 PAL或NTSC。
- ....:变参接口,根据第二个参数来决定
编程步骤
- 打开摄像头文件 /dev/videox
- 获取当前主机上的摄像头列表信息
- #define VIDIOC_ENUM_FMT _IOWR('V',2,struct v412_fmtdesc)
- struct v412_fmtdesc fmt;
- ioctl(fd,VIDIOC_ENUM_FMT,&fmt);
- #define VIDIOC_ENUM_FMT _IOWR('V',2,struct v412_fmtdesc)
- 设置当前视频捕捉格式
- 也就是设置摄像头采集画面的宽度、高度、格式
- VIDIOC_S_FMT:设置当前驱动的视频捕捉格式
- #define VIDIOC_S_FMT _IOWR('V',5,struct v412_format)
- struct v412_format format;
- format.宽度 = 640;
- format.高度 = 400;
- ioctl(fd,VIDIOC_S_FMT,&format);
- 申请内核缓冲区队列VIDIOC_REQBUFS
- 一般会将摄像头获取到的数据放到4块内存空间---一次性存储4帧画面数据
- 将申请的内核缓冲区队列映射到用户空间VIDIOC_QUERYBUF
- 开启摄像头VIDIOC_STREAMON
- 将开启摄像头的命令从应用层发送到内核层中,内核层就会驱动这个摄像头开始工作
- while(1)
- 采集数据 --yuyv格式
- 注意;摄像头采集出来的图像数据格式组成是yuyv
- 将采集出来的一帧画面yuyv格式的数据转为rgb格式
- 将转换好rgb格式数据显示到ui控件上
- 采集数据 --yuyv格式
c代码
头文件
#include<stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <string.h>
#include <linux/videodev2.h> //v4l2视频开发框架
#include <sys/mman.h>
打开摄像头文件 /dev/videox
//打开摄像头文件返回文件描述符int fd = open("/dev/video7",O_RDWR);if(fd == -1){perror("open camera error");return -1;}获取当前主机上(开发板)摄像头列表信息
//2、获取当前主机上(开发板)摄像头列表信息//#define VIDIOC_ENUM_FMT _IOWR('V', 2, struct v4l2_fmtdesc)struct v4l2_fmtdesc v4fmt; //定义一个结构体v4fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //视频捕捉类型int i = 0;while(1){v4fmt.index = i++;int ret = ioctl(fd,VIDIOC_ENUM_FMT,&v4fmt);if(ret < 0){//perror("获取失败");break;}printf("index = %d\n",v4fmt.index);printf("flags = %d\n",v4fmt.flags);printf("description = %s\n",v4fmt.description);unsigned char*p = (unsigned char*)&v4fmt.pixelformat;printf("pixelformat = %c%c%c%c\n",p[0],p[1],p[2],p[3]);printf("reserved = %d\n",v4fmt.reserved[0]);}设置当前摄像头的画面格式 比如说 设置 采集图像的宽度为640 高度 480
//3、设置当前摄像头的画面格式 比如说 设置 采集图像的宽度为640 高度 480//#define VIDIOC_S_FMT _IOWR('V', 5, struct v4l2_format)//发送VIDIOC_S_FMT命令需要定义struct v4l2_format结构体,//该结构体存放摄像头的画面格式,将摄像头设置为视频捕捉模式需要用到struct v4l2_format结构体struct v4l2_format vfmt;//设置为视频捕捉模式vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;vfmt.fmt.pix.width = 640;// 设置宽(因为底层驱动已固定大小,不能任意改)vfmt.fmt.pix.height = 480;//设置高度vfmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; //设置视频采集格式//将设置好的格式发送到摄像头ioctl(fd,VIDIOC_S_FMT,&vfmt);//设置完通过VIDIOC_G_FMT这个命令来查看格式有没有设置成功//#define VIDIOC_G_FMT _IOWR('V', 4, struct v4l2_format) //获取格式memset(&vfmt,0,sizeof(vfmt)); //清空结构体//设置为视频捕捉模式vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//获取的格式信息存放在该结构体中int ret = ioctl(fd,VIDIOC_G_FMT,&vfmt);if(ret < 0){perror("获取格式失败");return -1;}//获取成功判断它的宽和高和模式if(vfmt.fmt.pix.width == 640 && vfmt.fmt.pix.height == 480 && vfmt.fmt.pix.pixelformat == V4L2_PIX_FMT_YUYV ){printf("设置成功\n");}else{printf("设置失败\n");}在内核空间中,申请一个缓冲区队列(队列中有4块缓冲区)
//4、在内核空间中,申请一个缓冲区队列(队列中有4块缓冲区)//发送VIDIOC_REQBUFS命令需要struct v4l2_requestbuffers结构体struct v4l2_requestbuffers reqbuffers;reqbuffers.count = 4; //申请4个缓冲区reqbuffers.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;// 摄像头采集模式reqbuffers.memory = V4L2_MEMORY_MMAP; // mmap内存映射//向内核空间打一个报告,向你申请4个缓冲区队列,申请的方式为内存映射ret = ioctl(fd,VIDIOC_REQBUFS,&reqbuffers); //获取的信息存放在该结构体if(ret < 0){perror("申请队列空间失败");return -1;}将申请好的缓冲区队列 映射到 用户空间中
//5、将申请好的缓冲区队列映射到用户空间中//#define VIDIOC_QUERYBUF _IOWR('v',9,struct v4l2_buffer)//这个数组有4个元素,每个元素存储的是地址,存储的地址就是映射成功之后的地址unsigned char* mptr[4];unsigned int size[4];//发送VIDIOC_QUERYBUF命令需要struct v4l2_buffer结构体struct v4l2_buffer mapbuffer;mapbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;// 摄像头采集模式for(int i=0;i<4;i++){mapbuffer.index = i; //申请的缓冲区编号//发送VIDIOC_QUERYBUF命令来查询内核空间队列ret = ioctl(fd,VIDIOC_QUERYBUF,&mapbuffer); if(ret < 0) {perror("查询内核空间队列失败\n");return -1;} //mmap真正来实现内存映射 ,该函数的返回值是一个内存的首地址mptr[i] = (unsigned char*)mmap(NULL,mapbuffer.length,PROT_READ|PROT_WRITE,MAP_SHARED,fd,mapbuffer.m.offset); size[i] = mapbuffer.length;//通知使用完毕,----放回内核//#define VIDIOC_QBUF _IOWR('V', 15, struct v4l2_buffer)ret = ioctl(fd,VIDIOC_QBUF,&mapbuffer);if(ret < 0){perror("放回失败\n");return -1;}}开启摄像头
//6、开启摄像头 //#define VIDIOC_STREAMON _IOW('V', 18, int)int type = V4L2_BUF_TYPE_VIDEO_CAPTURE;// 摄像头采集模式//发送VIDIOC_QUERYBUF命令来开启摄像头ioctl(fd,VIDIOC_STREAMON,&type);采集数据 yuyv
unsigned char buffer[640*480*3] = {0};//采集后的数据int size;//发送命令采集数据函数get_frame(buffer,&size);//获取图片
void get_frame(unsigned char*buffer,int *size)
{ //1、先查询 当前帧数据 到底 在哪个 缓冲区中//采集数据 --VIDIOC_DQBUF:把数据从缓存中读取出来//#define VIDIOC_DQBUF _IOWR('V', 17, struct v4l2_buffer)//发送VIDIOC_DQBUF需要struct v4l2_buffer结构体struct v4l2_buffer readbuffer;readbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//采集模式//发送VIDIOC_DQBUF采集数据放到结构体里int ret = ioctl(fd,VIDIOC_DQBUF,&readbuffer);if(ret < 0){perror("提取数据失败");return -1 ;}//使用内存拷贝 -- void *memcpy(void *dest, const void *src, size_t n);memcpy(buffer,mptr[readbuffer.index],readbuffer.length);*size = readbuffer.length;//VIDIOC_QBUF:把数据放回缓存队列//通知内核已使用完毕//#define VIDIOC_QBUF _IOWR('V', 15, struct v4l2_buffer)ret = ioctl(fd,VIDIOC_QBUF,&readbuffer);if(ret < 0){perror("放回队列失败");return -1 ;}
}将采集出来的yuyv格式的数据---转换成 rgb
unsigned char rgb[640*480*3] = {0};//转换后的数据//8、将采集出来的yuyv格式的数据---转换成 rgbyuyv2rgb0(buffer, rgb, 640, 480);
//将yuyv格式转为rgb格式
int yuyv2rgb0(unsigned char *yuv, unsigned char *rgb, unsigned int width, unsigned int height)
{unsigned int in, out;int y0, u, y1, v;unsigned int pixel24;unsigned char *pixel = (unsigned char *)&pixel24;unsigned int size = width*height*2;for(in = 0, out = 0; in < size; in += 4, out += 6){y0 = yuv[in+0];u = yuv[in+1];y1 = yuv[in+2];v = yuv[in+3];sign3 = 1;pixel24 = yuyv2rgb(y0, u, v);rgb[out+0] = pixel[0];rgb[out+1] = pixel[1];rgb[out+2] = pixel[2];pixel24 = yuyv2rgb(y1, u, v);rgb[out+3] = pixel[0];rgb[out+4] = pixel[1];rgb[out+5] = pixel[2];}return 0;
}将c代码移植到qt代码中,在qt的界面显示摄像头画面
新建一个ui界面,布局一个两个按钮用于开启,停止,一个QLabel显示画面
通过定时器来调整帧数
新建一个MCamera摄像头类,将c代码移植进去
MCamera摄像头类添加头文件,成员,函数接口
extern "C"{#include<stdio.h>#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h>#include <sys/ioctl.h>#include <string.h>#include <linux/videodev2.h> //v4l2视频开发框架#include <sys/mman.h>#include <unistd.h>
}
class MCamera
{
public:MCamera(const char*deviceName = "/dev/video7");void start();//启动摄像头void stop();//关闭摄像头void get_frame(unsigned char*buffer,int *size);//获取图像数据int yuyv2rgb0(unsigned char *buffer, unsigned char *rgbdata, int w, int h);//yuyv转为rgb
private:int fd;//摄像头文件描述符unsigned char* mptr[4];//这个数组有4个元素,每个元素存储的是地址,存储的地址就是映射成功之后的地址unsigned int size[4];//图像的大小bool captrueFlag;//拍照标志位
};实现MCamera摄像头类函数接口
MCamera::MCamera(const char*deviceName )
{//1、打开摄像头文件//打开摄像头文件返回文件描述符fd = open(deviceName,O_RDWR);if(fd == -1){perror("open camera error");return ;}//2、获取当前主机上(开发板)摄像头列表信息//#define VIDIOC_ENUM_FMT _IOWR('V', 2, struct v4l2_fmtdesc)struct v4l2_fmtdesc v4fmt; //定义一个结构体v4fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //视频捕捉类型int i = 0;while(1){v4fmt.index = i++;int ret = ioctl(fd,VIDIOC_ENUM_FMT,&v4fmt);if(ret < 0){//perror("获取失败");break;}printf("index = %d\n",v4fmt.index);printf("flags = %d\n",v4fmt.flags);printf("description = %s\n",v4fmt.description);unsigned char*p = (unsigned char*)&v4fmt.pixelformat;printf("pixelformat = %c%c%c%c\n",p[0],p[1],p[2],p[3]);printf("reserved = %d\n",v4fmt.reserved[0]);}//3、设置当前摄像头的画面格式 比如说 设置 采集图像的宽度为640 高度 480//#define VIDIOC_S_FMT _IOWR('V', 5, struct v4l2_format)struct v4l2_format vfmt;vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;vfmt.fmt.pix.width = 640;// 设置宽(因为底层驱动已固定大小,不能任意改)vfmt.fmt.pix.height = 480;//设置高度vfmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; //设置视频采集格式ioctl(fd,VIDIOC_S_FMT,&vfmt);//#define VIDIOC_G_FMT _IOWR('V', 4, struct v4l2_format) //获取格式memset(&vfmt,0,sizeof(vfmt)); //清 零结构体vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;int ret = ioctl(fd,VIDIOC_G_FMT,&vfmt); //获取的 信息存 放在该结构体if(ret < 0){perror("获取格式失败");return ;}if(vfmt.fmt.pix.width == 640 && vfmt.fmt.pix.height == 480 && vfmt.fmt.pix.pixelformat == V4L2_PIX_FMT_YUYV ){printf("设置成功\n");}else{printf("设置失败\n");}//4、在内核空间中,申请一个缓冲区队列(队列中有4块缓冲区)struct v4l2_requestbuffers reqbuffers;reqbuffers.count = 4; //申请4个缓冲区reqbuffers.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;// 摄像头采集reqbuffers.memory = V4L2_MEMORY_MMAP; // mmap//向内核空间打一个报告,向你申请4个缓冲区队列,申请的方式为内存映射ret = ioctl(fd,VIDIOC_REQBUFS,&reqbuffers); //获取的 信息存 放在该结构体if(ret < 0){perror("申请队列空间失败");return ;}//5、将申请好的缓冲区队列 映射到 用户空间中struct v4l2_buffer mapbuffer;mapbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;for(int i=0;i<4;i++){mapbuffer.index = i; //申请的缓冲区编号ret = ioctl(fd,VIDIOC_QUERYBUF,&mapbuffer);if(ret < 0) {perror("查询内核空间队列失败\n");return ;}//真正来实现内存映射 ,该函数的返回值是一个内存的首地址mptr[i] = (unsigned char*)mmap(NULL,mapbuffer.length,PROT_READ|PROT_WRITE,MAP_SHARED,fd,mapbuffer.m.offset);size[i] = mapbuffer.length;//通知使用完毕,----放回内核//#define VIDIOC_QBUF _IOWR('V', 15, struct v4l2_buffer)ret = ioctl(fd,VIDIOC_QBUF,&mapbuffer);if(ret < 0){perror("放回失败\n");return ;}}
}void MCamera::start()
{//6、开启摄像头//#define VIDIOC_STREAMON _IOW('V', 18, int)int type = V4L2_BUF_TYPE_VIDEO_CAPTURE;ioctl(fd,VIDIOC_STREAMON,&type);
}void MCamera::stop()
{//[8] 停止采集int type = V4L2_BUF_TYPE_VIDEO_CAPTURE;int ret = ioctl(fd,VIDIOC_STREAMOFF,&type);//释放内存 int munmap(void *addr, size_t length);for(int i=0;i<4;i++){munmap(mptr[i],size[i]);}//[9] 关闭设备::close(fd);
}void MCamera::get_frame(unsigned char *buffer, int *size)
{//采集数据 --VIDIOC_DQBUF:把数据从缓存中读取出来//#define VIDIOC_DQBUF _IOWR('V', 17, struct v4l2_buffer)//1、先查询 当前帧数据 到底 在哪个 缓冲区中struct v4l2_buffer readbuffer;readbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;int ret = ioctl(fd,VIDIOC_DQBUF,&readbuffer);if(ret < 0){perror("提取数据失败");return ;}//使用内存拷贝 -- void *memcpy(void *dest, const void *src, size_t n);memcpy(buffer,mptr[readbuffer.index],readbuffer.length);*size = readbuffer.length;//VIDIOC_QBUF:把数据放回缓存队列//通知内核已使用完毕//#define VIDIOC_QBUF _IOWR('V', 15, struct v4l2_buffer)ret = ioctl(fd,VIDIOC_QBUF,&readbuffer);if(ret < 0){perror("放回队列失败");return ;}
}int MCamera::yuyv2rgb0(unsigned char *buffer, unsigned char *rgbdata, int w, int h)
{int r1, g1, b1;int r2, g2, b2;for(int i=0; i<w*h/2; i++){char data[4];memcpy(data, buffer+i*4, 4);//Y0U0Y1V1 -->[Y0 U0 V1] [Y1 U0 V1]unsigned char Y0=data[0];unsigned char U0=data[1];unsigned char Y1=data[2];unsigned char V1=data[3];r1 = Y0+1.4075*(V1-128); if(r1>255)r1=255; if(r1<0)r1=0;g1 =Y0- 0.3455 * (U0-128) - 0.7169*(V1-128); if(g1>255)g1=255; if(g1<0)g1=0;b1 = Y0 + 1.779 * (U0-128); if(b1>255)b1=255; if(b1<0)b1=0;r2 = Y1+1.4075*(V1-128);if(r2>255)r2=255; if(r2<0)r2=0;g2 = Y1- 0.3455 * (U0-128) - 0.7169*(V1-128); if(g2>255)g2=255; if(g2<0)g2=0;b2 = Y1 + 1.779 * (U0-128); if(b2>255)b2=255; if(b2<0)b2=0;rgbdata[i*6+0]=r1;rgbdata[i*6+1]=g1;rgbdata[i*6+2]=b1;rgbdata[i*6+3]=r2;rgbdata[i*6+4]=g2;rgbdata[i*6+5]=b2;}
}
在主ui界面类加入头文件,成员,函数接口
#include <QTimer>
#include "mcamera.h"private slots:void onUpdateCameraUi();private:MCamera *m_camera;//自定义摄像头类QTimer *m_timer;//定时器类在构造函数中初始化摄像头类和定时器类,并关联定时器的槽函数
m_camera = NULL;m_timer = new QTimer;connect(m_timer,&QTimer::timeout,this,&Widget::onUpdateCameraUi);开启摄像头按钮点击事件
if(m_camera == NULL){m_camera = new MCamera;m_camera->start();//启动定时器,间隔时间采集图像数据m_timer->start(1); //1秒钟采集 一张画面(一帧画面)}关闭摄像头按钮点击事件
if(m_camera != NULL){m_timer->stop();m_camera->stop();delete m_camera;m_camera = NULL;}拍照按钮点击事件
captrueFlag=true;定时器槽函数实现
// 采集数据unsigned char buffer[640*480*3] = {0};unsigned char rgb[640*480*3] = {0};int size;m_camera->get_frame(buffer,&size);//yuyv转换rgbm_camera->yuyv2rgb0(buffer,rgb,640,480);//显示 源图像rgb --->pic对象QImage img = QImage(rgb,640,480,QImage::Format_RGB888);//保存为图片if(captrueFlag){img.save("1.bmp");captrueFlag = false;}QPixmap pic = QPixmap::fromImage(img);ui->label->setPixmap(pic);在linux中交叉编译放到开发板上运行
相关文章:

qt学习:arm摄像头+c调用v412框架驱动+qt调用v412框架驱动 显示摄像头画面
目录 跟内核进行数据通信的函数 编程步骤 c代码 头文件 打开摄像头文件 /dev/videox 获取当前主机上(开发板)摄像头列表信息 设置当前摄像头的画面格式 比如说 设置 采集图像的宽度为640 高度 480 在内核空间中,申请一个缓冲区队列…...
Linux 36.2@Jetson Orin Nano基础环境构建
Linux 36.2Jetson Orin Nano基础环境构建 1. 源由2. 步骤2.1 安装NVIDIA Jetson Linux 36.2系统2.2 必备软件安装2.3 基本远程环境2.3.1 远程ssh登录2.3.2 samba局域网2.3.3 VNC远程登录 2.4 开发环境安装 3. 总结 1. 源由 现在流行什么,也跟风来么一个一篇。当然&…...
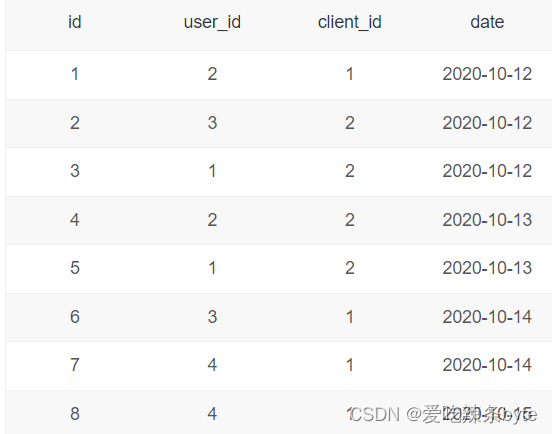
牛客网SQL264:查询每个日期新用户的次日留存率
官网链接: 牛客每个人最近的登录日期(五)_牛客题霸_牛客网牛客每天有很多人登录,请你统计一下牛客每个日期新用户的次日留存率。 有一个登录(login。题目来自【牛客题霸】https://www.nowcoder.com/practice/ea0c56cd700344b590182aad03cc61b8?tpId82 …...
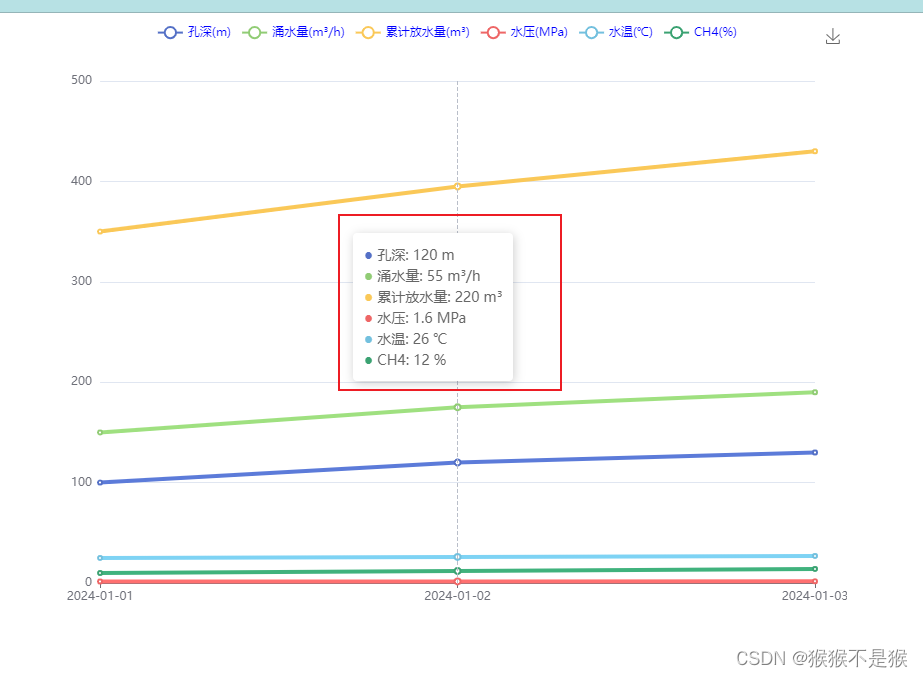
echarts 曲线图自定义提示框
<!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>曲线图</title><!-- 引入 ECharts 库 -->…...

幻兽帕鲁服务器怎么搭建?Palworld多人联机教程
玩转幻兽帕鲁服务器,阿里云推出新手0基础一键部署幻兽帕鲁服务器教程,傻瓜式一键部署,3分钟即可成功创建一台Palworld专属服务器,成本仅需26元,阿里云服务器网aliyunfuwuqi.com分享2024年新版基于阿里云搭建幻兽帕鲁服…...
DAY39: 动态规划不同路径问题62
Leetcode: 62 不同路径 机器人从(0 , 0) 位置出发,到(m - 1, n - 1)终点。 基本思路 1、确定dp数组(dp table)以及下标的含义 dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条…...
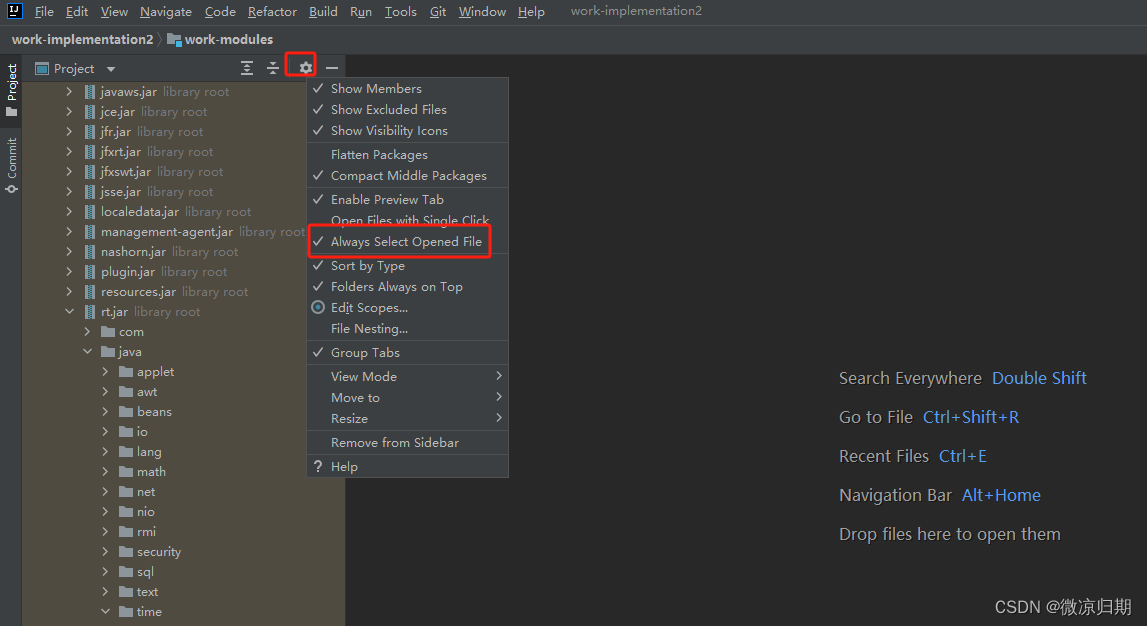
idea开发工具的简单使用与常见问题
1、配置git 选择左上角目录file->setting 打开,Version Control 目录下Git,选择git安装目录下的git.exe文件; 点击test,出现git版本,则表示git识别成功,点击右下角确认即可生效。 2、配置node.js 选…...
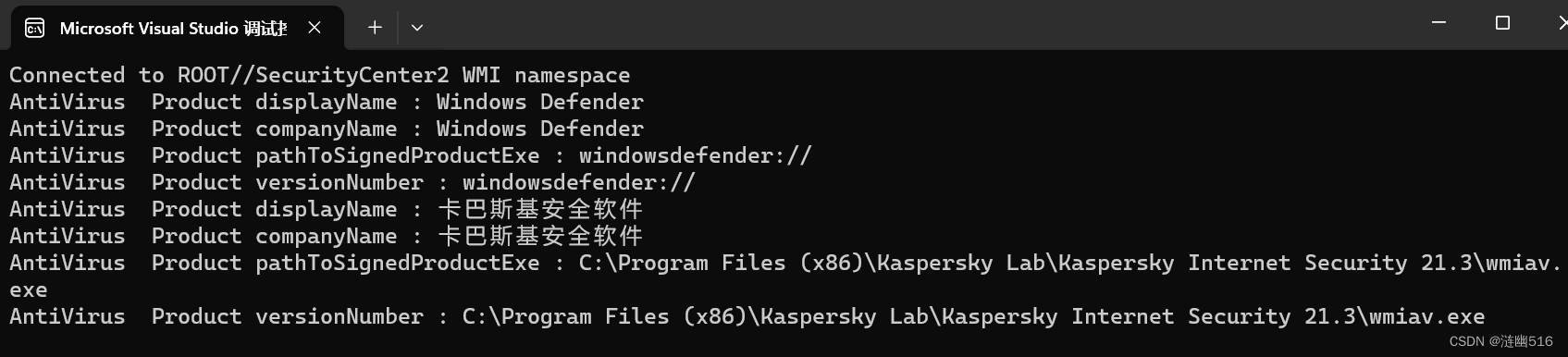
使用 WMI 查询安全软件信息
在这篇文章中,我们将详细介绍如何使用 Windows Management Instrumentation (WMI) API 来查询当前计算机上安装的安全软件的基本信息。我们将分析代码的各个部分,并解释每个步骤所涉及的技术和原理。 一、什么是 WMI? WMI 是 Windows Manag…...
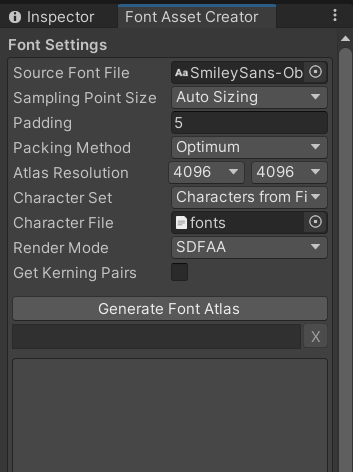
创建TextMeshPro字体文件
相比于Unity的Text组件,TextMesh Pro提供了更强大的文本格式和布局控制,更高级的文本渲染技术,更灵活的文本样式和纹理支持,更好的性能以及更易于使用的优点。但unity自带TextMeshPro字体不支持中文。这里使用普通字体文件生成Tex…...

信创ARM架构QT应用开发环境搭建
Linux ARM架构QT应用开发环境搭建 前言交叉工具链Ubuntu上安装 32 位 ARM 交叉工具链Ubuntu上安装 64 位 ARM 交叉工具链 交叉编译 QT 库下载 QT 源码交叉编译 QT 源码 Qt Creator交叉编译配置配置 Qt Creator Kits创建一个测试项目 小结 前言 有没有碰到过这种情况࿱…...
使用SPM_batch进行批量跑脚本(matlab.m)
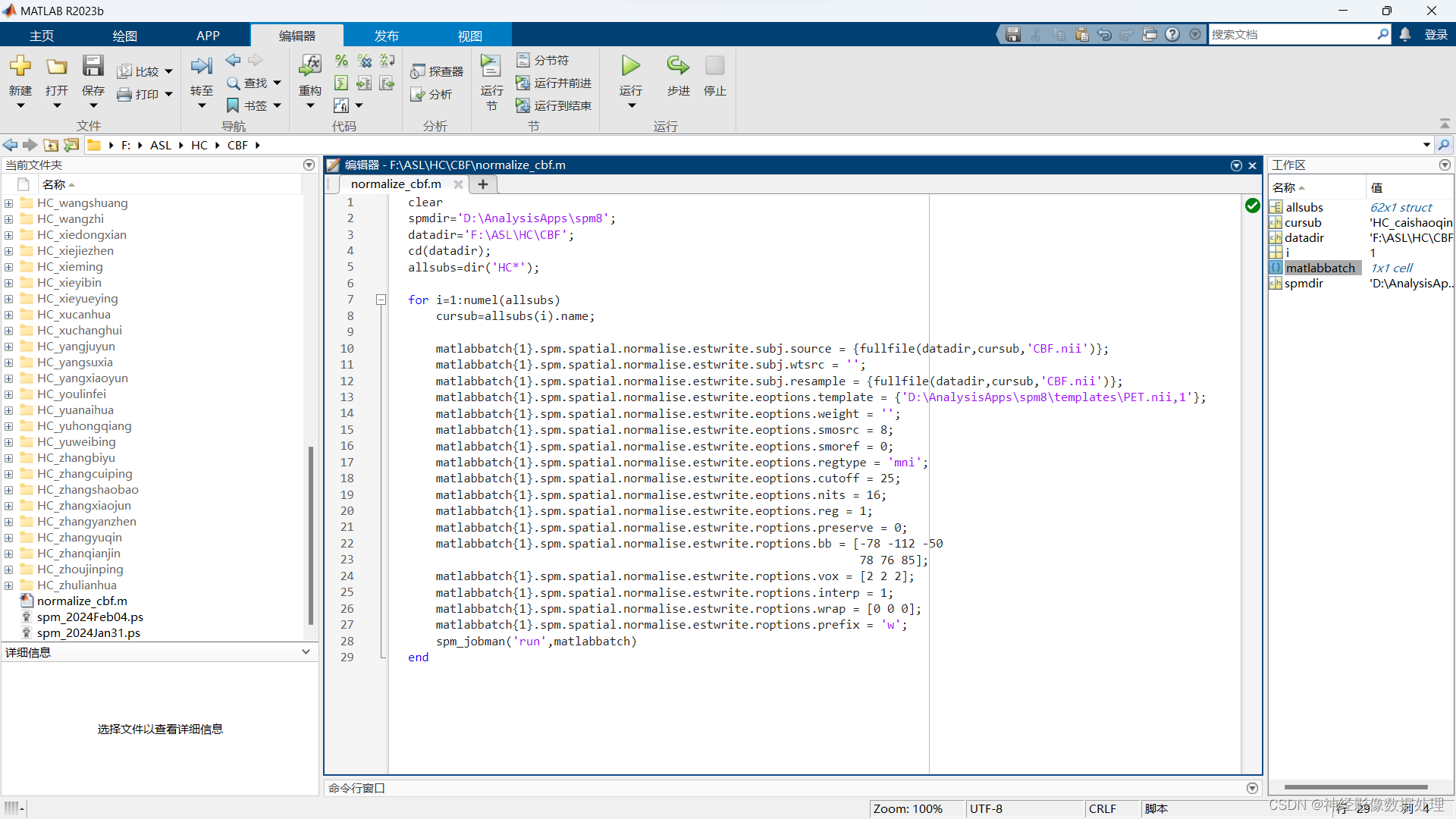
软件:spm8matlab2023bwin11 数据格式: F:\ASL\HC\CBF\HC_caishaoqing\CBF.nii F:\ASL\HC\CBF\HC_caishaoqing\T1.nii F:\ASL\HC\CBF\HC_wangdonga\CBF.nii F:\ASL\HC\CBF\HC_wangdonga\T1.nii clear spmdirD:\AnalysisApps\spm8; datadirF:\ASL\HC\CBF…...

力扣0124——二叉树的最大路径和
二叉树的最大路径和 难度:困难 题目描述 二叉树中的 路径 被定义为一条节点序列,序列中每对相邻节点之间都存在一条边。同一个节点在一条路径序列中 至多出现一次 。该路径 至少包含一个 节点,且不一定经过根节点。 路径和 是路径中各节点…...

c# 字符串帮助类
public class StringHelper { #region 全角半角互相转换 /// <summary> /// 转全角的函数(SBC case) /// </summary> /// <param name"str">任意字符串</param> /// <returns>全…...

LabVIEW双光子荧光显微成像系统开发
双光子显微成像是一种高级荧光显微技术,广泛用于生物学和医学研究,尤其是用于活体组织的深层成像。在双光子成像过程中,振镜(Galvo镜)扮演了非常关键的角色,它负责精确控制激光束在样本上的扫描路径。以下是…...

Prim模板
通过代码探索Prim算法:最小生成树之旅 在计算机科学领域,图算法占据了至关重要的位置,尤其是在设计高效的网络(无论是社交网络、计算机网络还是交通网)时。在这些算法中,寻找最小生成树(MST&am…...

CSS之盒子模型
盒子模型 01-选择器 结构伪类选择器 基本使用 作用:根据元素的结构关系查找元素。 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta http-equiv"X-UA-Compatible" content"IE…...

Linux系统安装(CentOS Vmware)
学习环境安装 VMware安装 VMware下载&安装 访问官网:https://www.vmware.com 在此处可以选择语言 点击China(简体中文) 点击产品,点击Workstation Pro 下滑,点击下载试用版 下滑找到Workstation 17 Pro for Wi…...

STM32 硬件随机数发生器(RNG)
STM32 硬件随机数发生器 文章目录 STM32 硬件随机数发生器前言第1章 随机数发生器简介1.1 RNG主要特性1.2.RNG应用 第2章 RNG原理框图第3章 RNG相关寄存器3.1 RNG 控制寄存器 (RNG_CR)3.2 RNG 状态寄存器 (RNG_SR)3.3 RNG 数据寄存器 (RNG_DR) 第3章 RNG代码部分第4章 STM32F1 …...
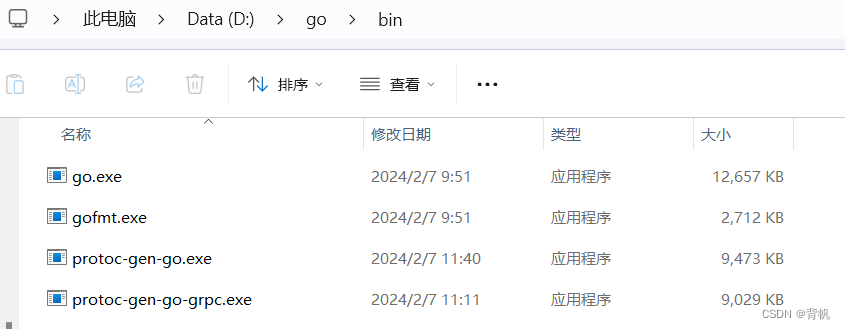
Window环境下使用go编译grpc最新教程
网上的grpc教程都或多或少有些老或者有些问题,导致最后执行生成文件时会报很多错。这里给出个人实践出可执行的编译命令与碰到的报错与解决方法。(ps:本文代码按照煎鱼的教程编写:4.2 gRPC Client and Server - 跟煎鱼学 Go (gitbook.io)&…...
简单介绍、分类、读写流程及注意事项)
STM32——FLASH(1)简单介绍、分类、读写流程及注意事项
文章目录 FLASH的特点Nor flash和nand flashflash的读写flash 的存储单位 flash的读写过程 FLASH的特点 可擦写数据可修改可重写访问速度<ROM Nor flash和nand flash Nor flash 1、与SDRAM相似,用户可以直接运行装载到NORFLASH里面的代码,减少SRAM…...
: K8s 核心概念白话解读(上):Pod 和 Deployment 究竟是什么?)
云原生核心技术 (7/12): K8s 核心概念白话解读(上):Pod 和 Deployment 究竟是什么?
大家好,欢迎来到《云原生核心技术》系列的第七篇! 在上一篇,我们成功地使用 Minikube 或 kind 在自己的电脑上搭建起了一个迷你但功能完备的 Kubernetes 集群。现在,我们就像一个拥有了一块崭新数字土地的农场主,是时…...
docker详细操作--未完待续
docker介绍 docker官网: Docker:加速容器应用程序开发 harbor官网:Harbor - Harbor 中文 使用docker加速器: Docker镜像极速下载服务 - 毫秒镜像 是什么 Docker 是一种开源的容器化平台,用于将应用程序及其依赖项(如库、运行时环…...
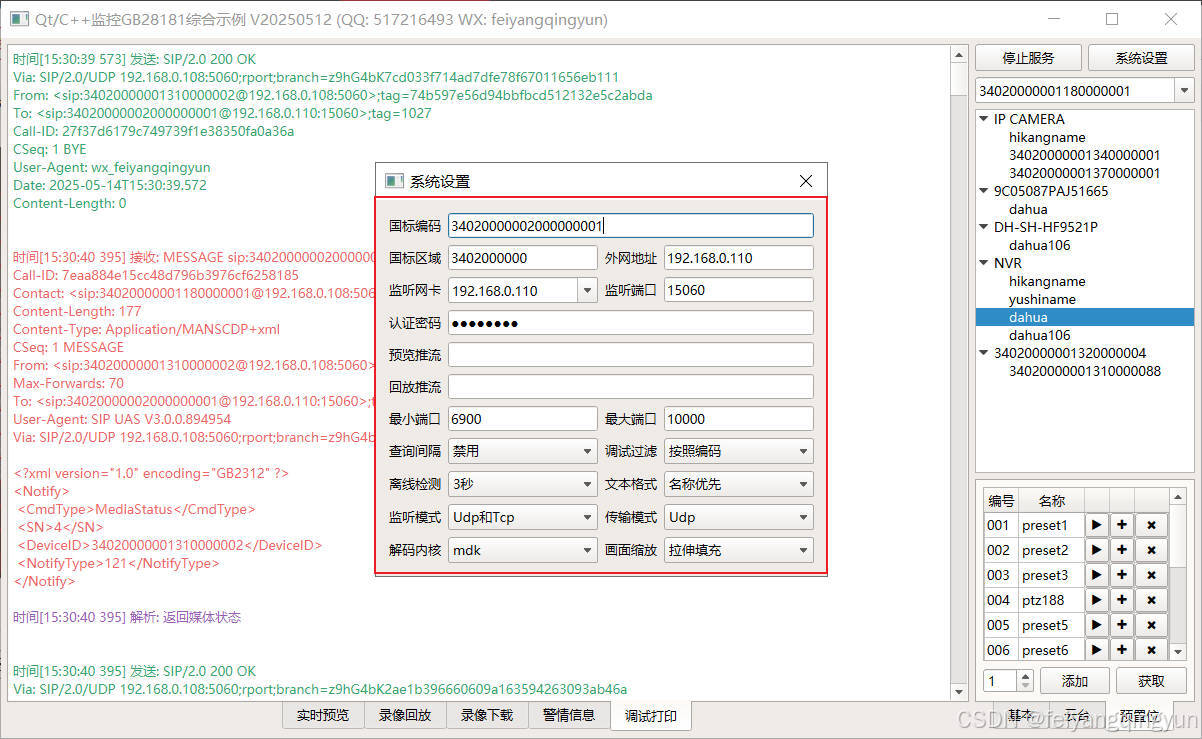
Qt/C++开发监控GB28181系统/取流协议/同时支持udp/tcp被动/tcp主动
一、前言说明 在2011版本的gb28181协议中,拉取视频流只要求udp方式,从2016开始要求新增支持tcp被动和tcp主动两种方式,udp理论上会丢包的,所以实际使用过程可能会出现画面花屏的情况,而tcp肯定不丢包,起码…...
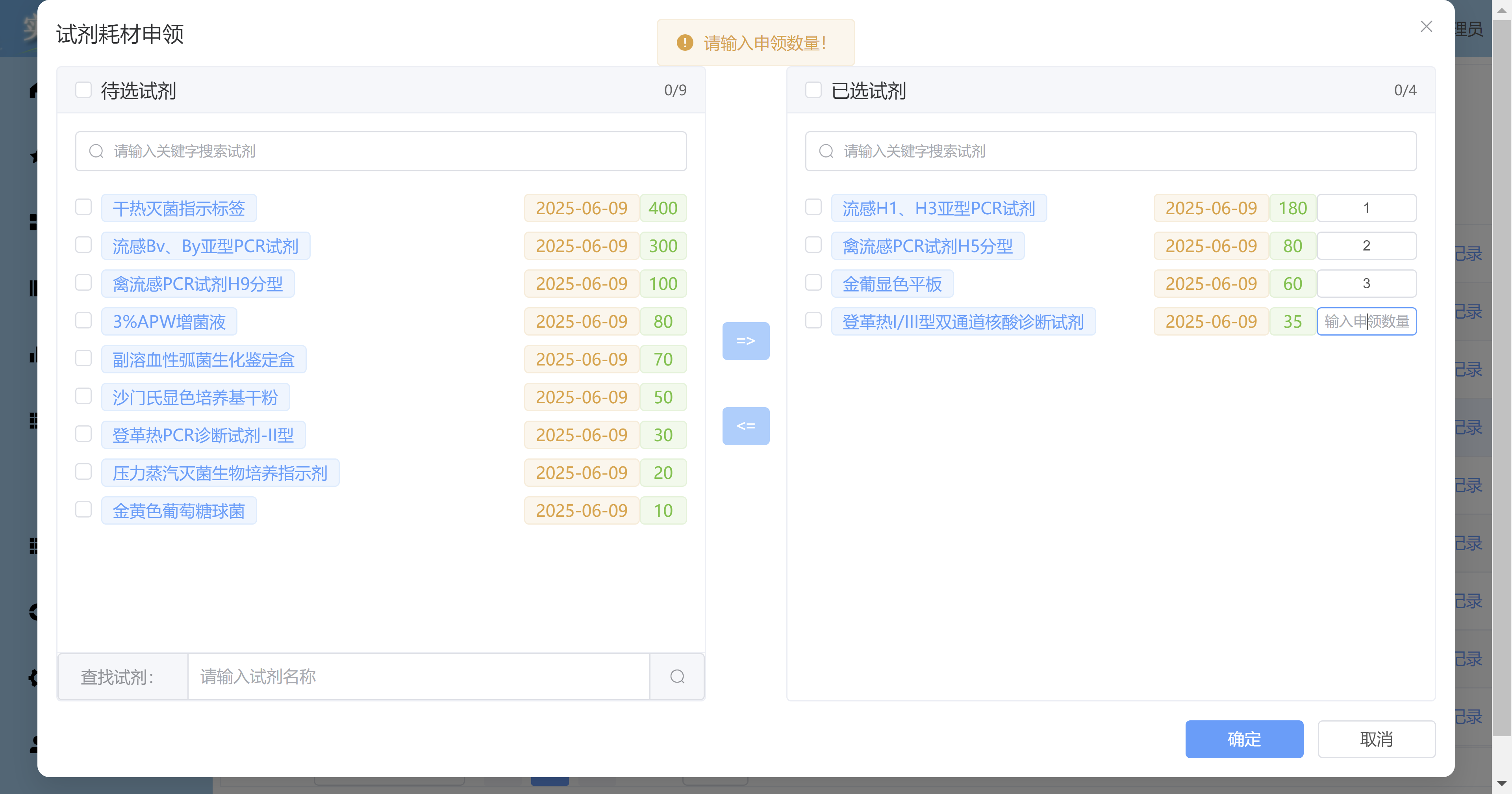
Vue3 + Element Plus + TypeScript中el-transfer穿梭框组件使用详解及示例
使用详解 Element Plus 的 el-transfer 组件是一个强大的穿梭框组件,常用于在两个集合之间进行数据转移,如权限分配、数据选择等场景。下面我将详细介绍其用法并提供一个完整示例。 核心特性与用法 基本属性 v-model:绑定右侧列表的值&…...

大语言模型如何处理长文本?常用文本分割技术详解
为什么需要文本分割? 引言:为什么需要文本分割?一、基础文本分割方法1. 按段落分割(Paragraph Splitting)2. 按句子分割(Sentence Splitting)二、高级文本分割策略3. 重叠分割(Sliding Window)4. 递归分割(Recursive Splitting)三、生产级工具推荐5. 使用LangChain的…...

AirSim/Cosys-AirSim 游戏开发(四)外部固定位置监控相机
这个博客介绍了如何通过 settings.json 文件添加一个无人机外的 固定位置监控相机,因为在使用过程中发现 Airsim 对外部监控相机的描述模糊,而 Cosys-Airsim 在官方文档中没有提供外部监控相机设置,最后在源码示例中找到了,所以感…...
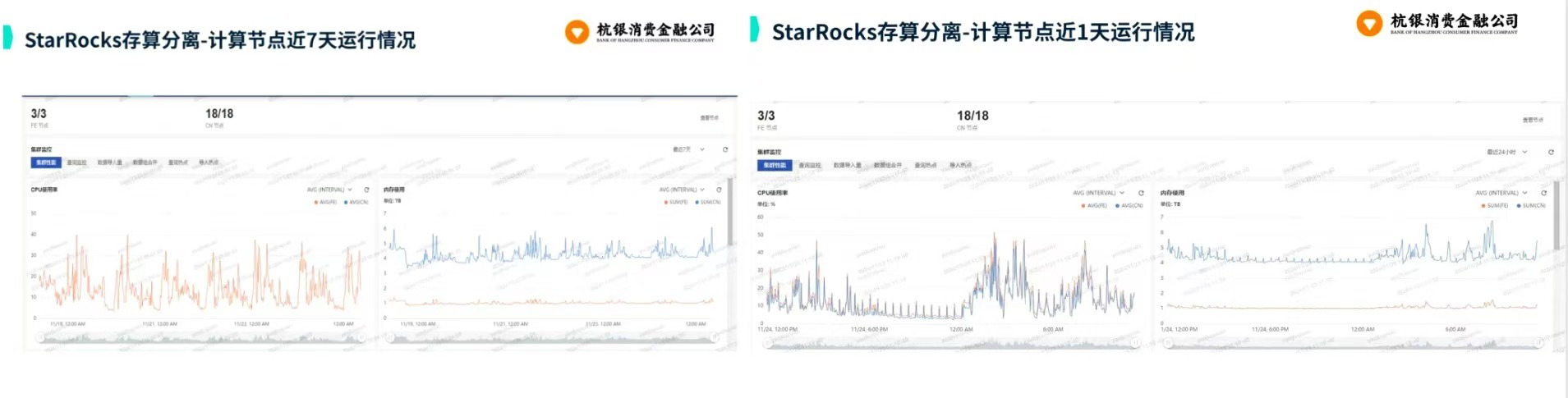
从 GreenPlum 到镜舟数据库:杭银消费金融湖仓一体转型实践
作者:吴岐诗,杭银消费金融大数据应用开发工程师 本文整理自杭银消费金融大数据应用开发工程师在StarRocks Summit Asia 2024的分享 引言:融合数据湖与数仓的创新之路 在数字金融时代,数据已成为金融机构的核心竞争力。杭银消费金…...

Unity中的transform.up
2025年6月8日,周日下午 在Unity中,transform.up是Transform组件的一个属性,表示游戏对象在世界空间中的“上”方向(Y轴正方向),且会随对象旋转动态变化。以下是关键点解析: 基本定义 transfor…...

Python实现简单音频数据压缩与解压算法
Python实现简单音频数据压缩与解压算法 引言 在音频数据处理中,压缩算法是降低存储成本和传输效率的关键技术。Python作为一门灵活且功能强大的编程语言,提供了丰富的库和工具来实现音频数据的压缩与解压。本文将通过一个简单的音频数据压缩与解压算法…...

机器学习的数学基础:线性模型
线性模型 线性模型的基本形式为: f ( x ) ω T x b f\left(\boldsymbol{x}\right)\boldsymbol{\omega}^\text{T}\boldsymbol{x}b f(x)ωTxb 回归问题 利用最小二乘法,得到 ω \boldsymbol{\omega} ω和 b b b的参数估计$ \boldsymbol{\hat{\omega}}…...