Windows10安装PCL1.14.0及点云配准
一、下载visual studio2022
下载网址:Visual Studio: 面向软件开发人员和 Teams 的 IDE 和代码编辑器 (microsoft.com)

安装的时候选择"使用C++的桌面开发“,同时可以修改文件路径,可以放在D盘。修改文件路径的时候,共享组件、工具和SDK的路径无法修改,可能是因为你之前有安装过Visual studio。可以通过以下操作解决:
1.首先WIN+R,输入regedit回车
2.按照这个顺序展开目录
HKEY_LOCAL_MACHINESOFTWAREMicrosoftVisualStudioSetup
3.右键删除SharedInstallationPath 和 CachePath,就可以修改共享组件、工具和SDK的路径了
二、安装PCL1.14.0
都是以我自己的安装路径为例
1.下载
官网下载:Releases · PointCloudLibrary/pcl · GitHub

只要下载PCL-1.14.0-AllInOne-msvc2022-win64.exe和pcl-1.14.0-pdb-msvc2022-win64.zip两个文件即可。

如果下载太慢,我这里已经下载好了:
链接:https://pan.baidu.com/s/177DvR5gOcVL7iPm4xI7s_w
提取码:wstc
2.安装
点击PCL-1.14.0-AllInOne-msvc2022-win64.exe进行安装

下一步

我接受
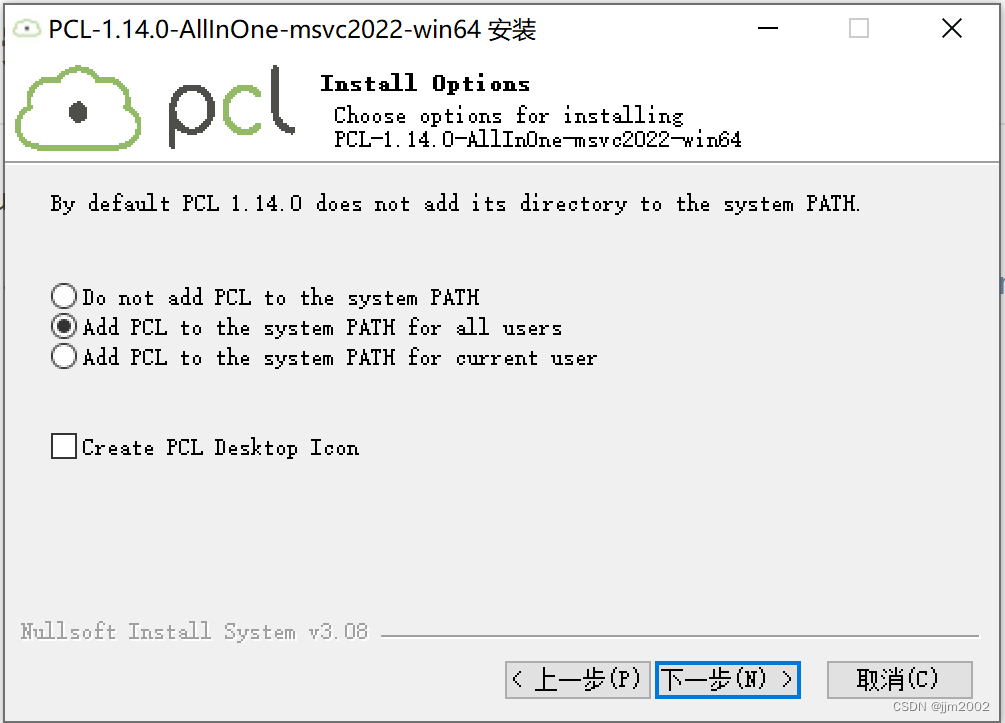
选择Add PCL to the system Path for all users,下一步
可以选择修改路径,我自己的路径是C:\Compiler\PCL\PCL 1.14.0,你可以选择自己的路径,不过一定要记得,因为之后配置环境变量要用到,然后下一步
没必要创建快捷方式,下一步,然后点击安装;在安装过程中,会出现提醒你变量名太长,没办法写入环境变量,这个时候你直接确定就行,等安装完成之后,自己配置环境变量。安装完成之后会出现这三个应用
把OpenNi2.2 SDK for Windows 64-bit给卸载掉,因为它有默认安装路径,即使我们修改文件安装路径,它还是安装在默认路径;卸载完之后,打开C:\Compiler\PCL\PCL 1.14.0\3rdParty\OpenNI2文件夹,发现里面有一个OpenNI-Windows-x64-2.2.msi,这是安装PCL-1.14.0-AllInOne-msvc2022-win64.exe的时候附带的,点击安装,可以帮你再次安装OpenNi2.2 SDK for Windows 64-bit,而且可以修改成自己的路径,我的路径是C:\Compiler\PCL\PCL 1.14.0\3rdParty\OpenNI2

安装完成之后就会包含这些内容
接着把pcl-1.14.0-pdb-msvc2022-win64.zip解压

把里面的所有pdb文件都复制到C:\Compiler\PCL\PCL 1.14.0\bin里面
3.配置环境变量
此电脑右键属性

点击高级系统设置

点击环境变量

确保这四个都存在,这是安装PCL-1.14.0-AllInOne-msvc2022-win64.exe的时候自动生成的,接着点击Path开始配置环境变量

C:\Compiler\PCL\PCL 1.14.0\bin
C:\Compiler\PCL\PCL 1.14.0\3rdParty\VTK\bin
C:\Compiler\PCL\PCL 1.14.0\3rdParty\OpenNI2\Tools
C:\Compiler\PCL\PCL 1.14.0\3rdParty\OpenNI2\Redist
C:\Compiler\PCL\PCL 1.14.0\3rdParty\Boost\lib
C:\Compiler\PCL\PCL 1.14.0\3rdParty\Qhull\bin
C:\Compiler\PCL\PCL 1.14.0\3rdParty\FLANN\bin把这几个路径添加进环境变量即可。
三、创建项目
打开visual studio2022

创建新项目

选择空项目,下一步

可以修改项目名称,和位置;创建项目
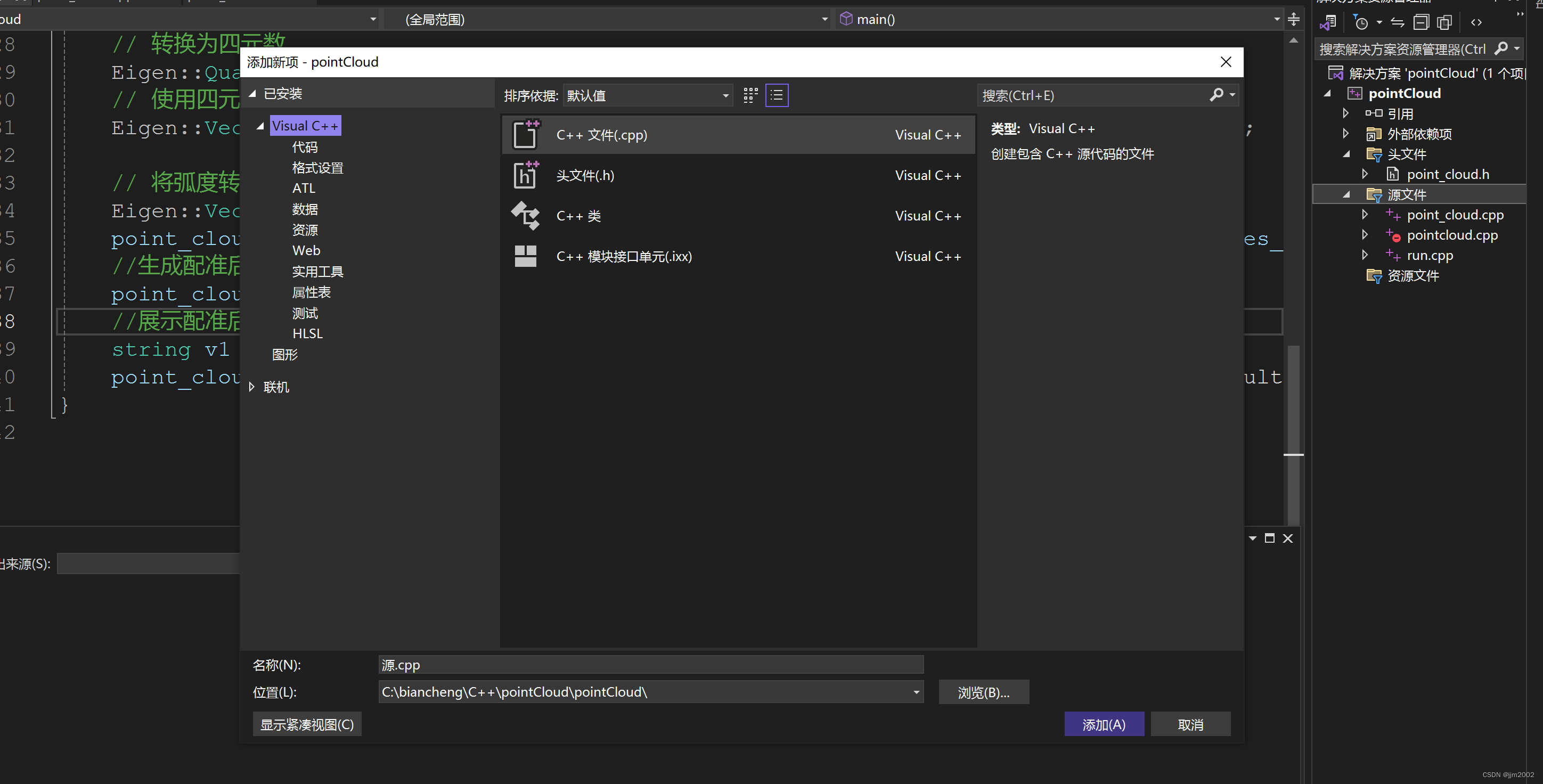
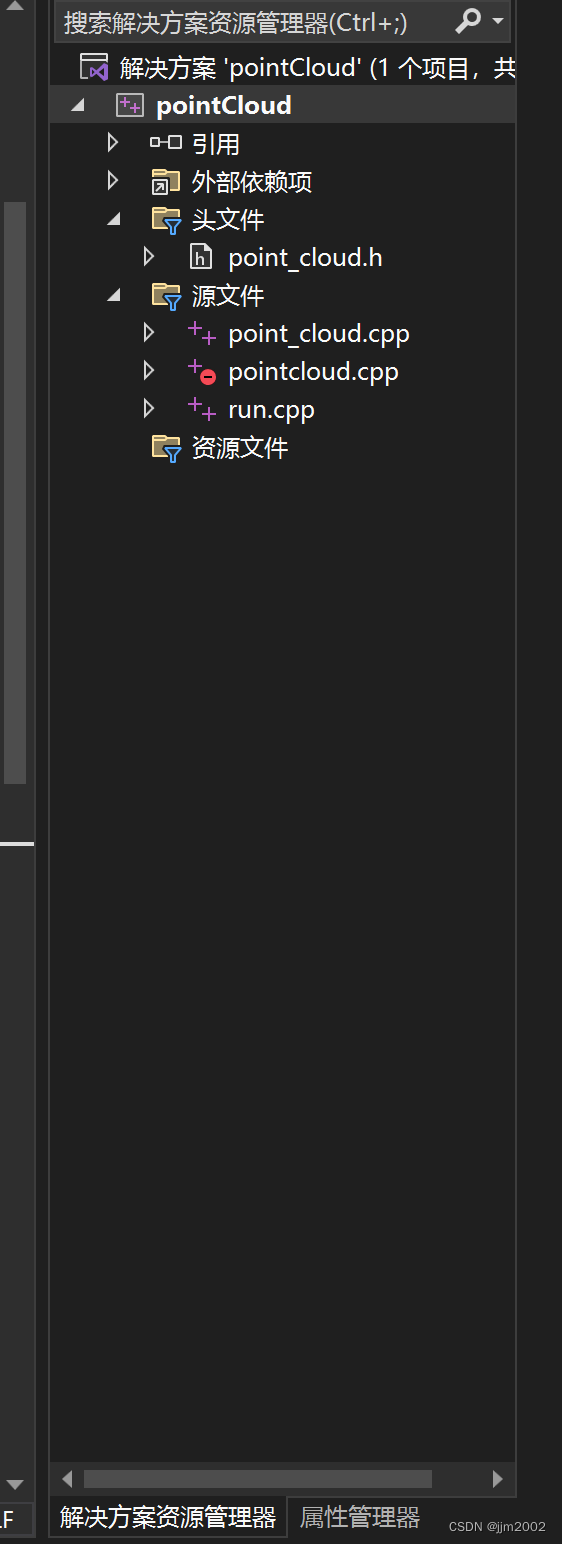
右键点击源文件,添加新项,随便取个名字,点击添加(注意:我已经添加过文件了,如果是新创建的文件,源文件里面是啥也没有的)

右键点击解决方案下方的pointCloud(这个是项目名称),点击属性,就会出现这个属性页,点击VC++目录
C:\Compiler\PCL\PCL 1.14.0\3rdParty\Boost\include\boost-1_84
C:\Compiler\PCL\PCL 1.14.0\3rdParty\Eigen3\include\eigen3
C:\Compiler\PCL\PCL 1.14.0\3rdParty\FLANN\include
C:\Compiler\PCL\PCL 1.14.0\3rdParty\Qhull\include
C:\Compiler\PCL\PCL 1.14.0\3rdParty\VTK\include\vtk-9.3
C:\Compiler\PCL\PCL 1.14.0\3rdParty\OpenNI2\Include
C:\Compiler\PCL\PCL 1.14.0\include\pcl-1.14把这些路径加入到包含目录里
C:\Compiler\PCL\PCL 1.14.0\3rdParty\FLANN\lib
C:\Compiler\PCL\PCL 1.14.0\3rdParty\Boost\lib
C:\Compiler\PCL\PCL 1.14.0\lib
C:\Compiler\PCL\PCL 1.14.0\3rdParty\VTK\lib
C:\Compiler\PCL\PCL 1.14.0\3rdParty\Qhull\lib
C:\Compiler\PCL\PCL 1.14.0\3rdParty\OpenNI2\Lib这些路径放到库目录里

然后点击C/C++的所有选项,把SDL检查改成否

再点击C/C++的代码生成,修改启用增强指令集为高级适量扩展(X86/X64)(/arch:AVX)

BOOST_USE_WINDOWS_H
NOMINMAX
_CRT_SECURE_NO_DEPRECATE在C/C++的预处理器里面的预处理定义增加这三行
可以用代码获取附加项文件名
#include <iostream>
#include <fstream>
#include <string>
#include <filesystem>
namespace fs = std::filesystem;bool ends_with(const std::string& value, const std::string& ending)
{if (ending.size() > value.size()) return false;return std::equal(ending.rbegin(), ending.rend(), value.rbegin());
}int main() {std::string path1 = "C:\\Compiler\\PCL\\PCL 1.14.0\\3rdParty\\VTK\\lib\\"; // 你需要替换为你的具体路径std::string path2 = "C:\\Compiler\\PCL\\PCL 1.14.0\\lib\\"; // 你需要替换为你的具体路径std::ofstream ofs_glib1("gLibFiles1.txt");std::ofstream ofs_other1("otherFiles1.txt");std::ofstream ofs_glib2("gLibFiles2.txt");std::ofstream ofs_other2("otherFiles2.txt");if (!ofs_glib1 || !ofs_other1) {std::cerr << "无法打开输出文件.\n";return 1;}if (!ofs_glib2 || !ofs_other2) {std::cerr << "无法打开输出文件.\n";return 1;}for (auto& p : fs::directory_iterator(path1)) {if (p.is_regular_file()) {std::string filename = p.path().filename().string();if (ends_with(filename, "-gd.lib") || ends_with(filename, "d.lib")) { // 检查文件名是否以 "-gd.lib" 或 "d.lib" 结尾ofs_glib1 << filename << '\n';}else {ofs_other1 << filename << '\n';}}}for (auto& p : fs::directory_iterator(path2)) {if (p.is_regular_file()) {std::string filename = p.path().filename().string();if (ends_with(filename, "-gd.lib") || ends_with(filename, "d.lib")) { // 检查文件名是否以 "-gd.lib" 或 "d.lib" 结尾ofs_glib2 << filename << '\n';}else {ofs_other2 << filename << '\n';}}}return 0;
}//C:\\Compiler\\PCL\\PCL 1.14.0\\3rdParty\\VTK\\lib\\一共可以得到四个txt文件

上面两个保存的是Debug版本的附加项 ,把这两个文件的内容整合到一起:
pcl_commond.lib
pcl_featuresd.lib
pcl_filtersd.lib
pcl_iod.lib
pcl_io_plyd.lib
pcl_kdtreed.lib
pcl_keypointsd.lib
pcl_mld.lib
pcl_octreed.lib
pcl_outofcored.lib
pcl_peopled.lib
pcl_recognitiond.lib
pcl_registrationd.lib
pcl_sample_consensusd.lib
pcl_searchd.lib
pcl_segmentationd.lib
pcl_stereod.lib
pcl_surfaced.lib
pcl_trackingd.lib
pcl_visualizationd.lib
vtkcgns-9.3-gd.lib
vtkChartsCore-9.3-gd.lib
vtkCommonColor-9.3-gd.lib
vtkCommonComputationalGeometry-9.3-gd.lib
vtkCommonCore-9.3-gd.lib
vtkCommonDataModel-9.3-gd.lib
vtkCommonExecutionModel-9.3-gd.lib
vtkCommonMath-9.3-gd.lib
vtkCommonMisc-9.3-gd.lib
vtkCommonSystem-9.3-gd.lib
vtkCommonTransforms-9.3-gd.lib
vtkDICOMParser-9.3-gd.lib
vtkDomainsChemistry-9.3-gd.lib
vtkDomainsChemistryOpenGL2-9.3-gd.lib
vtkdoubleconversion-9.3-gd.lib
vtkexodusII-9.3-gd.lib
vtkexpat-9.3-gd.lib
vtkFiltersAMR-9.3-gd.lib
vtkFiltersCore-9.3-gd.lib
vtkFiltersExtraction-9.3-gd.lib
vtkFiltersFlowPaths-9.3-gd.lib
vtkFiltersGeneral-9.3-gd.lib
vtkFiltersGeneric-9.3-gd.lib
vtkFiltersGeometry-9.3-gd.lib
vtkFiltersHybrid-9.3-gd.lib
vtkFiltersHyperTree-9.3-gd.lib
vtkFiltersImaging-9.3-gd.lib
vtkFiltersModeling-9.3-gd.lib
vtkFiltersParallel-9.3-gd.lib
vtkFiltersParallelImaging-9.3-gd.lib
vtkFiltersPoints-9.3-gd.lib
vtkFiltersProgrammable-9.3-gd.lib
vtkFiltersSelection-9.3-gd.lib
vtkFiltersSMP-9.3-gd.lib
vtkFiltersSources-9.3-gd.lib
vtkFiltersStatistics-9.3-gd.lib
vtkFiltersTexture-9.3-gd.lib
vtkFiltersTopology-9.3-gd.lib
vtkFiltersVerdict-9.3-gd.lib
vtkfmt-9.3-gd.lib
vtkfreetype-9.3-gd.lib
vtkGeovisCore-9.3-gd.lib
vtkgl2ps-9.3-gd.lib
vtkglew-9.3-gd.lib
vtkhdf5-9.3-gd.lib
vtkhdf5_hl-9.3-gd.lib
vtkImagingColor-9.3-gd.lib
vtkImagingCore-9.3-gd.lib
vtkImagingFourier-9.3-gd.lib
vtkImagingGeneral-9.3-gd.lib
vtkImagingHybrid-9.3-gd.lib
vtkImagingMath-9.3-gd.lib
vtkImagingMorphological-9.3-gd.lib
vtkImagingSources-9.3-gd.lib
vtkImagingStatistics-9.3-gd.lib
vtkImagingStencil-9.3-gd.lib
vtkInfovisCore-9.3-gd.lib
vtkInfovisLayout-9.3-gd.lib
vtkInteractionImage-9.3-gd.lib
vtkInteractionStyle-9.3-gd.lib
vtkInteractionWidgets-9.3-gd.lib
vtkIOAMR-9.3-gd.lib
vtkIOAsynchronous-9.3-gd.lib
vtkIOCesium3DTiles-9.3-gd.lib
vtkIOCGNSReader-9.3-gd.lib
vtkIOChemistry-9.3-gd.lib
vtkIOCityGML-9.3-gd.lib
vtkIOCONVERGECFD-9.3-gd.lib
vtkIOCore-9.3-gd.lib
vtkIOEnSight-9.3-gd.lib
vtkIOExodus-9.3-gd.lib
vtkIOExport-9.3-gd.lib
vtkIOExportGL2PS-9.3-gd.lib
vtkIOExportPDF-9.3-gd.lib
vtkIOGeometry-9.3-gd.lib
vtkIOHDF-9.3-gd.lib
vtkIOImage-9.3-gd.lib
vtkIOImport-9.3-gd.lib
vtkIOInfovis-9.3-gd.lib
vtkIOIOSS-9.3-gd.lib
vtkIOLegacy-9.3-gd.lib
vtkIOLSDyna-9.3-gd.lib
vtkIOMINC-9.3-gd.lib
vtkIOMotionFX-9.3-gd.lib
vtkIOMovie-9.3-gd.lib
vtkIONetCDF-9.3-gd.lib
vtkIOOggTheora-9.3-gd.lib
vtkIOParallel-9.3-gd.lib
vtkIOParallelXML-9.3-gd.lib
vtkIOPLY-9.3-gd.lib
vtkIOSegY-9.3-gd.lib
vtkIOSQL-9.3-gd.lib
vtkioss-9.3-gd.lib
vtkIOTecplotTable-9.3-gd.lib
vtkIOVeraOut-9.3-gd.lib
vtkIOVideo-9.3-gd.lib
vtkIOXML-9.3-gd.lib
vtkIOXMLParser-9.3-gd.lib
vtkjpeg-9.3-gd.lib
vtkjsoncpp-9.3-gd.lib
vtkkissfft-9.3-gd.lib
vtklibharu-9.3-gd.lib
vtklibproj-9.3-gd.lib
vtklibxml2-9.3-gd.lib
vtkloguru-9.3-gd.lib
vtklz4-9.3-gd.lib
vtklzma-9.3-gd.lib
vtkmetaio-9.3-gd.lib
vtknetcdf-9.3-gd.lib
vtkogg-9.3-gd.lib
vtkParallelCore-9.3-gd.lib
vtkParallelDIY-9.3-gd.lib
vtkpng-9.3-gd.lib
vtkpugixml-9.3-gd.lib
vtkRenderingAnnotation-9.3-gd.lib
vtkRenderingContext2D-9.3-gd.lib
vtkRenderingContextOpenGL2-9.3-gd.lib
vtkRenderingCore-9.3-gd.lib
vtkRenderingFreeType-9.3-gd.lib
vtkRenderingGL2PSOpenGL2-9.3-gd.lib
vtkRenderingHyperTreeGrid-9.3-gd.lib
vtkRenderingImage-9.3-gd.lib
vtkRenderingLabel-9.3-gd.lib
vtkRenderingLICOpenGL2-9.3-gd.lib
vtkRenderingLOD-9.3-gd.lib
vtkRenderingOpenGL2-9.3-gd.lib
vtkRenderingSceneGraph-9.3-gd.lib
vtkRenderingUI-9.3-gd.lib
vtkRenderingVolume-9.3-gd.lib
vtkRenderingVolumeOpenGL2-9.3-gd.lib
vtkRenderingVtkJS-9.3-gd.lib
vtksqlite-9.3-gd.lib
vtksys-9.3-gd.lib
vtkTestingRendering-9.3-gd.lib
vtktheora-9.3-gd.lib
vtktiff-9.3-gd.lib
vtkverdict-9.3-gd.lib
vtkViewsContext2D-9.3-gd.lib
vtkViewsCore-9.3-gd.lib
vtkViewsInfovis-9.3-gd.lib
vtkWrappingTools-9.3-gd.lib
vtkzlib-9.3-gd.lib下面两个保存的是Release版本的附加项,把这两个文件的内容整合到一起:
pcl_common.lib
pcl_features.lib
pcl_filters.lib
pcl_io.lib
pcl_io_ply.lib
pcl_kdtree.lib
pcl_keypoints.lib
pcl_ml.lib
pcl_octree.lib
pcl_outofcore.lib
pcl_people.lib
pcl_recognition.lib
pcl_registration.lib
pcl_sample_consensus.lib
pcl_search.lib
pcl_segmentation.lib
pcl_stereo.lib
pcl_surface.lib
pcl_tracking.lib
pcl_visualization.lib
vtkcgns-9.3.lib
vtkChartsCore-9.3.lib
vtkCommonColor-9.3.lib
vtkCommonComputationalGeometry-9.3.lib
vtkCommonCore-9.3.lib
vtkCommonDataModel-9.3.lib
vtkCommonExecutionModel-9.3.lib
vtkCommonMath-9.3.lib
vtkCommonMisc-9.3.lib
vtkCommonSystem-9.3.lib
vtkCommonTransforms-9.3.lib
vtkDICOMParser-9.3.lib
vtkDomainsChemistry-9.3.lib
vtkDomainsChemistryOpenGL2-9.3.lib
vtkdoubleconversion-9.3.lib
vtkexodusII-9.3.lib
vtkexpat-9.3.lib
vtkFiltersAMR-9.3.lib
vtkFiltersCellGrid-9.3.lib
vtkFiltersCore-9.3.lib
vtkFiltersExtraction-9.3.lib
vtkFiltersFlowPaths-9.3.lib
vtkFiltersGeneral-9.3.lib
vtkFiltersGeneric-9.3.lib
vtkFiltersGeometry-9.3.lib
vtkFiltersGeometryPreview-9.3.lib
vtkFiltersHybrid-9.3.lib
vtkFiltersHyperTree-9.3.lib
vtkFiltersImaging-9.3.lib
vtkFiltersModeling-9.3.lib
vtkFiltersParallel-9.3.lib
vtkFiltersParallelImaging-9.3.lib
vtkFiltersPoints-9.3.lib
vtkFiltersProgrammable-9.3.lib
vtkFiltersReduction-9.3.lib
vtkFiltersSelection-9.3.lib
vtkFiltersSMP-9.3.lib
vtkFiltersSources-9.3.lib
vtkFiltersStatistics-9.3.lib
vtkFiltersTensor-9.3.lib
vtkFiltersTexture-9.3.lib
vtkFiltersTopology-9.3.lib
vtkFiltersVerdict-9.3.lib
vtkfmt-9.3.lib
vtkfreetype-9.3.lib
vtkGeovisCore-9.3.lib
vtkgl2ps-9.3.lib
vtkglew-9.3.lib
vtkhdf5-9.3.lib
vtkhdf5_hl-9.3.lib
vtkImagingColor-9.3.lib
vtkImagingCore-9.3.lib
vtkImagingFourier-9.3.lib
vtkImagingGeneral-9.3.lib
vtkImagingHybrid-9.3.lib
vtkImagingMath-9.3.lib
vtkImagingMorphological-9.3.lib
vtkImagingSources-9.3.lib
vtkImagingStatistics-9.3.lib
vtkImagingStencil-9.3.lib
vtkInfovisCore-9.3.lib
vtkInfovisLayout-9.3.lib
vtkInteractionImage-9.3.lib
vtkInteractionStyle-9.3.lib
vtkInteractionWidgets-9.3.lib
vtkIOAMR-9.3.lib
vtkIOAsynchronous-9.3.lib
vtkIOCellGrid-9.3.lib
vtkIOCesium3DTiles-9.3.lib
vtkIOCGNSReader-9.3.lib
vtkIOChemistry-9.3.lib
vtkIOCityGML-9.3.lib
vtkIOCONVERGECFD-9.3.lib
vtkIOCore-9.3.lib
vtkIOEnSight-9.3.lib
vtkIOExodus-9.3.lib
vtkIOExport-9.3.lib
vtkIOExportGL2PS-9.3.lib
vtkIOExportPDF-9.3.lib
vtkIOFLUENTCFF-9.3.lib
vtkIOGeometry-9.3.lib
vtkIOHDF-9.3.lib
vtkIOImage-9.3.lib
vtkIOImport-9.3.lib
vtkIOInfovis-9.3.lib
vtkIOIOSS-9.3.lib
vtkIOLegacy-9.3.lib
vtkIOLSDyna-9.3.lib
vtkIOMINC-9.3.lib
vtkIOMotionFX-9.3.lib
vtkIOMovie-9.3.lib
vtkIONetCDF-9.3.lib
vtkIOOggTheora-9.3.lib
vtkIOParallel-9.3.lib
vtkIOParallelXML-9.3.lib
vtkIOPLY-9.3.lib
vtkIOSegY-9.3.lib
vtkIOSQL-9.3.lib
vtkioss-9.3.lib
vtkIOTecplotTable-9.3.lib
vtkIOVeraOut-9.3.lib
vtkIOVideo-9.3.lib
vtkIOXML-9.3.lib
vtkIOXMLParser-9.3.lib
vtkjpeg-9.3.lib
vtkjsoncpp-9.3.lib
vtkkissfft-9.3.lib
vtklibharu-9.3.lib
vtklibproj-9.3.lib
vtklibxml2-9.3.lib
vtkloguru-9.3.lib
vtklz4-9.3.lib
vtklzma-9.3.lib
vtkmetaio-9.3.lib
vtknetcdf-9.3.lib
vtkogg-9.3.lib
vtkParallelCore-9.3.lib
vtkParallelDIY-9.3.lib
vtkpng-9.3.lib
vtkpugixml-9.3.lib
vtkRenderingAnnotation-9.3.lib
vtkRenderingCellGrid-9.3.lib
vtkRenderingContext2D-9.3.lib
vtkRenderingContextOpenGL2-9.3.lib
vtkRenderingCore-9.3.lib
vtkRenderingFreeType-9.3.lib
vtkRenderingGL2PSOpenGL2-9.3.lib
vtkRenderingHyperTreeGrid-9.3.lib
vtkRenderingImage-9.3.lib
vtkRenderingLabel-9.3.lib
vtkRenderingLICOpenGL2-9.3.lib
vtkRenderingLOD-9.3.lib
vtkRenderingOpenGL2-9.3.lib
vtkRenderingSceneGraph-9.3.lib
vtkRenderingUI-9.3.lib
vtkRenderingVolume-9.3.lib
vtkRenderingVolumeOpenGL2-9.3.lib
vtkRenderingVtkJS-9.3.lib
vtksqlite-9.3.lib
vtksys-9.3.lib
vtkTestingRendering-9.3.lib
vtktheora-9.3.lib
vtktiff-9.3.lib
vtkverdict-9.3.lib
vtkViewsContext2D-9.3.lib
vtkViewsCore-9.3.lib
vtkViewsInfovis-9.3.lib
vtkWrappingTools-9.3.lib
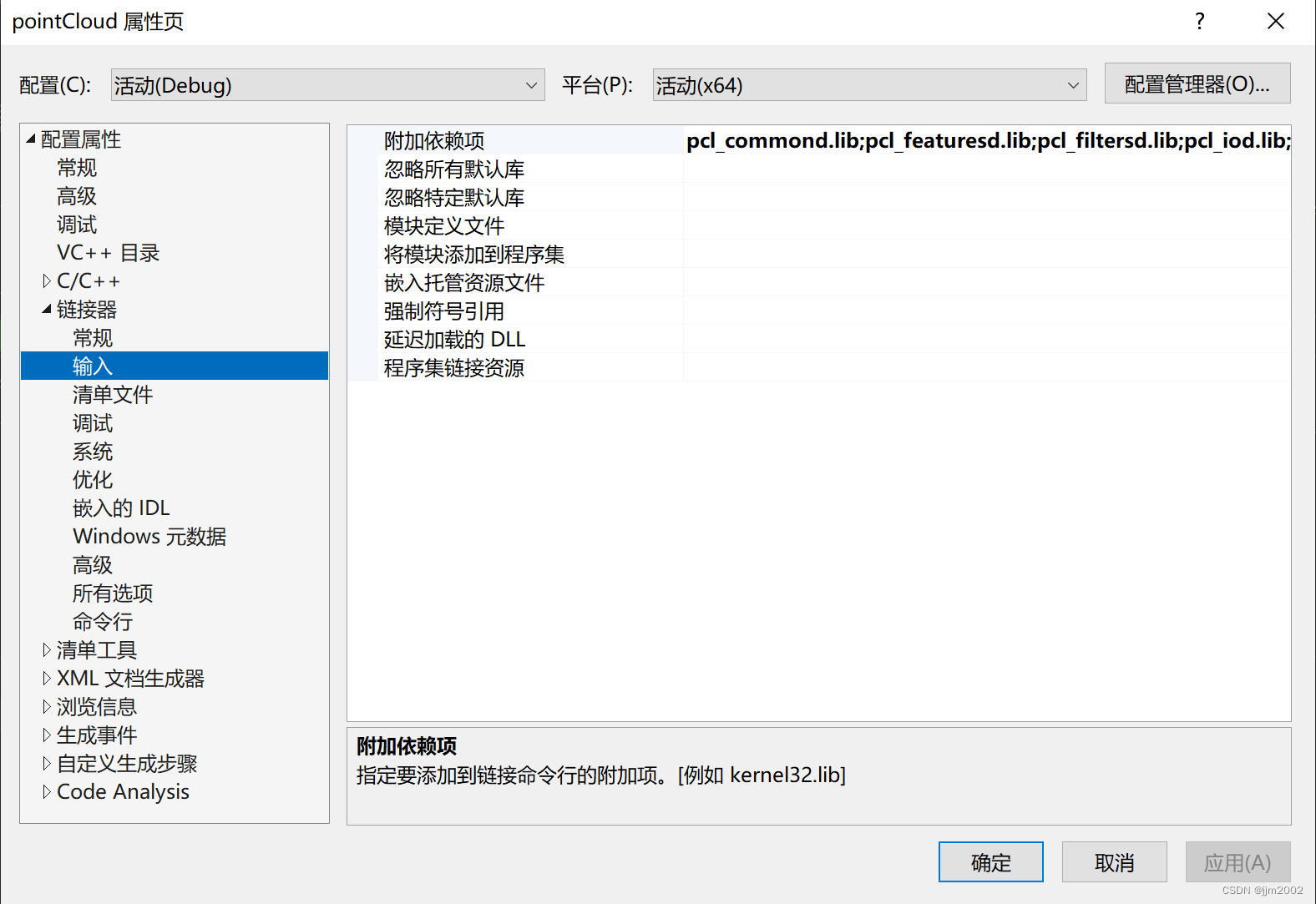
vtkzlib-9.3.lib选择哪个版本看你需求,在链接器的输入的附加依赖项里增加相应版本的附加项,配置完成,电脑重启,即可生效
四、确认是否安装成功
#include <iostream>
#include <vector>
#include <ctime>
#include <pcl/point_cloud.h>
#include <pcl/octree/octree.h>
#include <boost/thread/thread.hpp>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std;
int
main(int argc, char** argv)
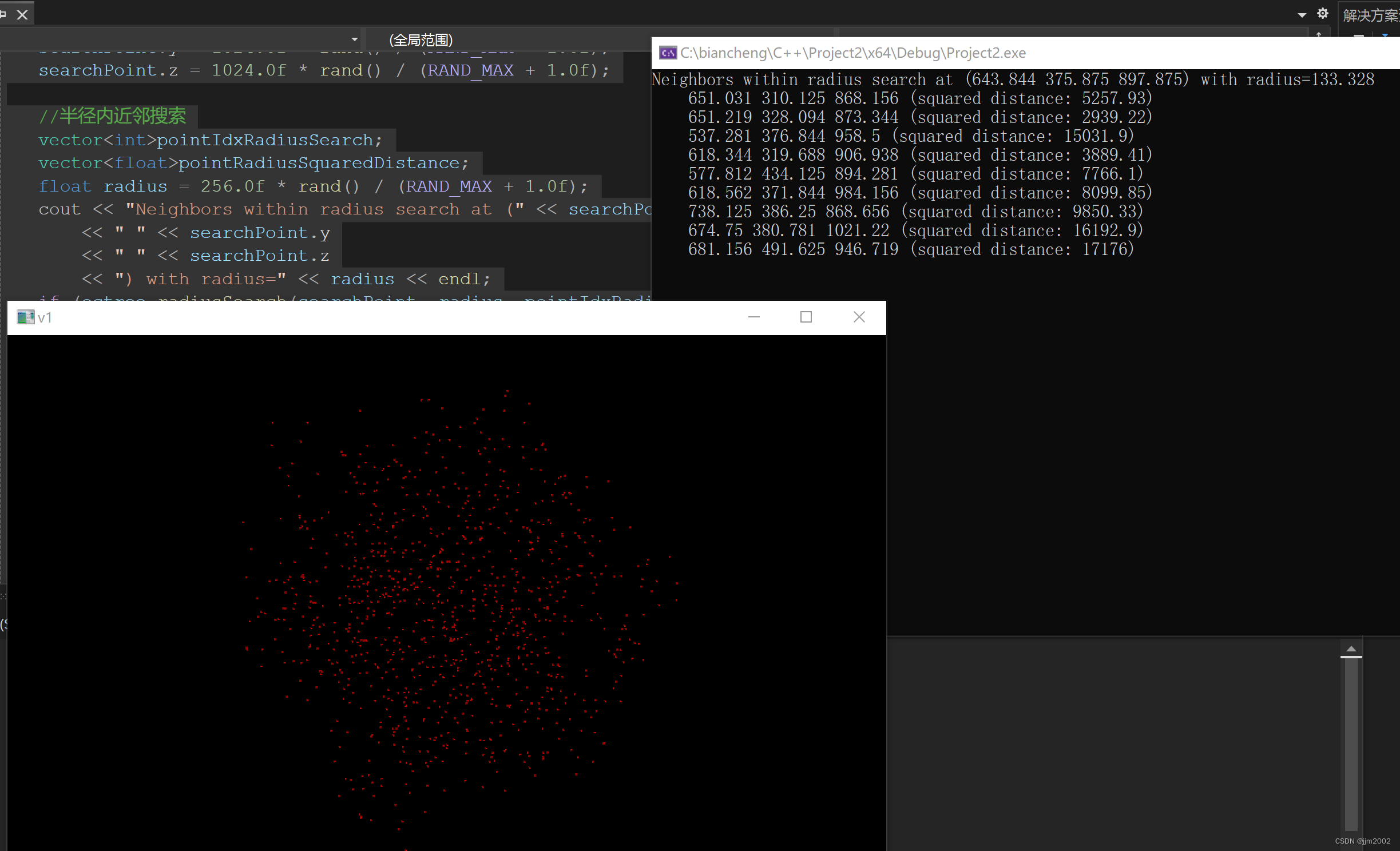
{srand((unsigned int)time(NULL));pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);// 创建点云数据cloud->width = 1000;cloud->height = 1;cloud->points.resize(cloud->width * cloud->height);for (size_t i = 0; i < cloud->points.size(); ++i){cloud->points[i].x = 1024.0f * rand() / (RAND_MAX + 1.0f);cloud->points[i].y = 1024.0f * rand() / (RAND_MAX + 1.0f);cloud->points[i].z = 1024.0f * rand() / (RAND_MAX + 1.0f);}pcl::octree::OctreePointCloudSearch<pcl::PointXYZ> octree(0.1);octree.setInputCloud(cloud);octree.addPointsFromInputCloud();pcl::PointXYZ searchPoint;searchPoint.x = 1024.0f * rand() / (RAND_MAX + 1.0f);searchPoint.y = 1024.0f * rand() / (RAND_MAX + 1.0f);searchPoint.z = 1024.0f * rand() / (RAND_MAX + 1.0f);//半径内近邻搜索vector<int>pointIdxRadiusSearch;vector<float>pointRadiusSquaredDistance;float radius = 256.0f * rand() / (RAND_MAX + 1.0f);cout << "Neighbors within radius search at (" << searchPoint.x<< " " << searchPoint.y<< " " << searchPoint.z<< ") with radius=" << radius << endl;if (octree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0){for (size_t i = 0; i < pointIdxRadiusSearch.size(); ++i)cout << " " << cloud->points[pointIdxRadiusSearch[i]].x<< " " << cloud->points[pointIdxRadiusSearch[i]].y<< " " << cloud->points[pointIdxRadiusSearch[i]].z<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << endl;}// 初始化点云可视化对象boost::shared_ptr<pcl::visualization::PCLVisualizer>viewer(new pcl::visualization::PCLVisualizer("v1"));viewer->setBackgroundColor(0, 0, 0); //设置背景颜色为黑色// 对点云着色可视化 (red).pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>target_color(cloud, 255, 0, 0);viewer->addPointCloud<pcl::PointXYZ>(cloud, target_color, "target cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "target cloud");// 等待直到可视化窗口关闭while (!viewer->wasStopped()){viewer->spinOnce(100);boost::this_thread::sleep(boost::posix_time::microseconds(1000));}return (0);
}这份代码运行之后出现红色点云:
五、点云配准
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/features/fpfh_omp.h>
#include <pcl/io/ply_io.h>//pcd输入输出头文件
#include <pcl/registration/icp.h>//点云icp算法头文件
#include <pcl/registration/ndt.h>//点云NDT算法头文件
#include <pcl/registration/ia_ransac.h>//点云ransac迭代对齐算法(SAC-IA)算法头文件
#include <pcl/registration/gicp.h>//点云GICP算法的头文件
#include <pcl/visualization/pcl_visualizer.h>//点云可视化头文件
#include <time.h>
#include <boost/thread.hpp>
#include <pcl/features/normal_3d_omp.h>
typedef pcl::PointXYZ PointT; //重定义pcl::PointXYZ为PointT
typedef pcl::PointCloud<PointT> PointCloud; //重定义pcl::PointCloud<PointT>为PointCloud
//点云配准类型
typedef pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> ICP;
typedef pcl::NormalDistributionsTransform<pcl::PointXYZ, pcl::PointXYZ> NDT;
typedef pcl::SampleConsensusInitialAlignment<pcl::PointXYZ, pcl::PointXYZ, pcl::FPFHSignature33> SAC_IA;
typedef pcl::GeneralizedIterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> GICP;
//FPFH特征
typedef pcl::FPFHEstimationOMP<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> FPFHEstimation;
typedef pcl::PointCloud<pcl::FPFHSignature33> FPFH;
//法线估计
typedef pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::Normal> NormalEstimation;
typedef pcl::PointCloud<pcl::Normal> Normal;
typedef pcl::search::KdTree<pcl::PointXYZ> KdTreeT;//点云可视化
void visualize_pcd(PointCloud::Ptr pcd_src,PointCloud::Ptr pcd_tgt,PointCloud::Ptr pcd_final)
{pcl::visualization::PCLVisualizer viewer("registration Viewer");// 设置背景viewer.setBackgroundColor(1, 1, 1);// 添加坐标轴到可视化对象,参数指定轴的大小(长度),这里设置为1.0单位长度viewer.addCoordinateSystem(0.5);// 设置相机位置和方向viewer.initCameraParameters();pcl::visualization::PointCloudColorHandlerCustom<PointT> src_h(pcd_src, 0, 255, 0);pcl::visualization::PointCloudColorHandlerCustom<PointT> tgt_h(pcd_tgt, 255, 0, 0);pcl::visualization::PointCloudColorHandlerCustom<PointT> final_h(pcd_final, 0, 0, 255);//viewer.addPointCloud(pcd_src, src_h, "source cloud"); //source绿色viewer.addPointCloud(pcd_tgt, tgt_h, "tgt cloud"); //target红色viewer.addPointCloud (pcd_final, final_h, "final cloud"); //final蓝色while (!viewer.wasStopped()){viewer.spinOnce(100);boost::this_thread::sleep(boost::posix_time::microseconds(1000));}
}void printinfo(Eigen::Matrix4f icp_trans, Eigen::Matrix3f rotation, Eigen::Vector3f translation, Eigen::Vector3f euler_angles_deg,Eigen::Quaternionf quaternion)
{cout.setf(ios::fixed);cout.precision(5);cout << endl << "Transformation matrix:" << endl << icp_trans << endl;//输出变换矩阵cout << endl << "Rotation matrix:" << endl << rotation << endl;cout << endl << "Translation vector:" << endl << translation << endl;cout << endl << "Euler Angle:" << endl;cout << endl << "roll(x):" << euler_angles_deg[2] << endl;cout << endl << "pitch(y):" << euler_angles_deg[1] << endl;cout << endl << "yaw(z):" << euler_angles_deg[0] << endl;// 输出四元数,由于欧拉角时常出现万向节,所以可以使用四元数来表示旋转,这样更精确cout << endl <<"Rotation quaternion: " << endl<< "w = " << quaternion.w() << endl<< ", x = " << quaternion.x() << endl<< ", y = " << quaternion.y() << endl<< ", z = " << quaternion.z() << endl;
}void downsampling(PointCloud::Ptr cloud_src_o, PointCloud::Ptr cloud_tgt_o,pcl::VoxelGrid<pcl::PointXYZ>::Ptr voxel_grid)
{float leaf = 0.005f;voxel_grid->setLeafSize(leaf, leaf, leaf); // 示例叶子大小voxel_grid->setInputCloud(cloud_src_o);voxel_grid->filter(*cloud_src_o);voxel_grid->setInputCloud(cloud_tgt_o);voxel_grid->filter(*cloud_tgt_o);
}
void normalestimation(NormalEstimation ne, Normal::Ptr src_normals, Normal::Ptr tgt_normals, KdTreeT::Ptr tree, PointCloud::Ptr cloud_src_o, PointCloud::Ptr cloud_tgt_o)
{创建一个NormalEstimationOMP对象,进行法线计算;ne.setSearchMethod(tree);ne.setKSearch(20);ne.setInputCloud(cloud_src_o);ne.compute(*src_normals);ne.setInputCloud(cloud_tgt_o);ne.compute(*tgt_normals);cout << "原点云法线计算完成" << endl <<*src_normals << endl;cout << "目标点云法线计算完成" << endl << *tgt_normals << endl;
}void fpfh_features(FPFHEstimation fpfh, FPFH::Ptr src_fpfhs,FPFH::Ptr tgt_fpfhs, PointCloud::Ptr cloud_src_o, PointCloud::Ptr cloud_tgt_o, KdTreeT::Ptr tree, Normal::Ptr src_normals, Normal::Ptr tgt_normals)
{fpfh.setSearchMethod(tree);fpfh.setRadiusSearch(0.05); // Use a radius search instead of a KdTree searchfpfh.setInputCloud(cloud_src_o);fpfh.setInputNormals(src_normals);fpfh.compute(*src_fpfhs);fpfh.setInputCloud(cloud_tgt_o);fpfh.setInputNormals(tgt_normals);fpfh.compute(*tgt_fpfhs);cout << "原点云特征计算完成" << *src_fpfhs << endl; cout << "目标点云特征计算完成" << *tgt_fpfhs << endl;
}GICP& gicp_registration(GICP& gicp, PointCloud& final_cloud,PointCloud::Ptr cloud_src_o, PointCloud::Ptr cloud_tgt_o)
{gicp.setInputSource(cloud_src_o);gicp.setInputTarget(cloud_tgt_o);// 配准时最大迭代次数gicp.setMaximumIterations(50);// 两次变化矩阵之间的差异小于这个阈值时,就认为已经收敛,停止迭代gicp.setTransformationEpsilon(1e-6);// 对应点之间的最大距离gicp.setMaxCorrespondenceDistance(0.05);// 采用随机采样一致性方法进行配准gicp.setRANSACOutlierRejectionThreshold(1.5);// 最小内点比例。在RANSAC配准方法中,当内点的比例小于此值时,认为配准失败。gicp.setRANSACIterations(20);// 执行配准,并将结果存储在Final中gicp.align(final_cloud);return gicp;}
SAC_IA& sacia_registration(SAC_IA & sac_ia, PointCloud& final_cloud,PointCloud::Ptr cloud_src_o, PointCloud::Ptr cloud_tgt_o,FPFH::Ptr & src_fpfhs, FPFH::Ptr& tgt_fpfhs)
{sac_ia.setInputSource(cloud_src_o);sac_ia.setSourceFeatures(src_fpfhs);sac_ia.setInputTarget(cloud_tgt_o);sac_ia.setTargetFeatures(tgt_fpfhs);// 设置SAC-IA配准的参数sac_ia.setMinSampleDistance(0.05f);sac_ia.setMaxCorrespondenceDistance(0.01f);sac_ia.setMaximumIterations(500);// 创建一个空的PointCloud对象来接收结果pcl::PointCloud<pcl::PointXYZ> final_registration;// 执行配准,并将结果存储在final_registration中sac_ia.align(final_registration);return sac_ia;
}
NDT& ndt_registration(NDT & ndt, PointCloud& final_cloud,PointCloud::Ptr cloud_src_o, PointCloud::Ptr cloud_tgt_o)
{// 配置NDTndt.setTransformationEpsilon(0.1);ndt.setStepSize(0.5);ndt.setResolution(2.0);ndt.setMaximumIterations(20);ndt.setInputSource(cloud_src_o);ndt.setInputTarget(cloud_tgt_o);ndt.align(final_cloud);return ndt;
}ICP& icp_registration(ICP & icp, PointCloud & final_cloud, PointCloud::Ptr cloud_src_o, PointCloud::Ptr cloud_tgt_o)
{icp.setMaximumIterations(50);// 两次变化矩阵之间的差值icp.setTransformationEpsilon(1e-10);// 均方误差icp.setEuclideanFitnessEpsilon(0.01);icp.setInputSource(cloud_src_o);//录入source点云icp.setInputTarget(cloud_tgt_o);//录入target点云icp.align(final_cloud);//最终配准结果return icp;
}
int main(int argc, char** argv)
{//加载点云文件PointCloud::Ptr cloud_src_o(new pcl::PointCloud<pcl::PointXYZ>);//原点云,待配准pcl::io::loadPLYFile("ply/bun_zipper.ply", *cloud_src_o);PointCloud::Ptr cloud_tgt_o(new pcl::PointCloud<pcl::PointXYZ>);//目标点云pcl::io::loadPLYFile("ply/bun_zipper2.ply", *cloud_tgt_o);clock_t start = clock();//下采样pcl::VoxelGrid<pcl::PointXYZ>::Ptr voxel_grid(new pcl::VoxelGrid<pcl::PointXYZ>);downsampling(cloud_src_o, cloud_tgt_o, voxel_grid);创建一个NormalEstimationOMP对象,进行法线计算NormalEstimation ne;Normal::Ptr src_normals(new pcl::PointCloud<pcl::Normal>);Normal::Ptr tgt_normals(new pcl::PointCloud<pcl::Normal>);KdTreeT::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());normalestimation(ne, src_normals, tgt_normals, tree, cloud_src_o, cloud_tgt_o);//计算FPFH特征/*FPFHEstimation fpfh;FPFH::Ptr src_fpfhs(new pcl::PointCloud<pcl::FPFHSignature33>());FPFH::Ptr tgt_fpfhs(new pcl::PointCloud<pcl::FPFHSignature33>());fpfh_features(fpfh, src_fpfhs, tgt_fpfhs, cloud_src_o, cloud_tgt_o, tree, src_normals, tgt_normals);*/// 点云配准PointCloud::Ptr icp_result(new pcl::PointCloud<pcl::PointXYZ>);PointCloud final_cloud;ICP icp;ICP & reg_p = icp_registration(icp, final_cloud, cloud_src_o, cloud_tgt_o);/*NDT ndt;NDT & reg_p = ndt_registration(ndt, final_cloud, cloud_src_o, cloud_tgt_o);*//*GICP gicp;GICP& reg_p = gicp_registration(gicp, final_cloud, cloud_src_o, cloud_tgt_o);*///SAC_IA sac_ia;//SAC_IA& reg_p = sacia_registration(sac_ia, final_cloud, cloud_src_o, cloud_tgt_o, src_fpfhs, tgt_fpfhs);clock_t end = clock();cout << "total time: " << (double)(end - start) / (double)CLOCKS_PER_SEC << " s" << endl;//输出配准所用时间cout << "ICP has converged:" << reg_p.hasConverged() << " score: " << reg_p.getFitnessScore() << std::endl;Eigen::Matrix4f reg_p_trans;// 变换矩阵reg_p_trans = reg_p.getFinalTransformation();// 平移向量Eigen::Vector3f translation = reg_p_trans.block<3, 1>(0, 3);// 旋转矩阵Eigen::Matrix3f rotation = reg_p_trans.block<3, 3>(0, 0);// 转换为四元数Eigen::Quaternionf quaternion(rotation);// 使用四元数重新计算欧拉角Eigen::Vector3f euler_angles_rad = quaternion.toRotationMatrix().eulerAngles(2, 1, 0);获取欧拉角(弧度)//Eigen::Vector3f euler_angles_rad = rotation.eulerAngles(0, 1, 2);// 将弧度转换为角度Eigen::Vector3f euler_angles_deg = euler_angles_rad * 180.0 / M_PI;printinfo(reg_p_trans, rotation, translation, euler_angles_deg, quaternion);//使用创建的变换对未过滤的输入点云进行变换pcl::transformPointCloud(*cloud_src_o, *icp_result, reg_p_trans);visualize_pcd(cloud_src_o, cloud_tgt_o, icp_result);return (0);
}
这里面有四种点云配准方法,ICP,NDT,GICP,SAC-IA,其中使用SAC-IA的时候要把fpfh计算的代码解开注释,其他算法使用的时候不需要解开fpfh计算的代码;提醒下,fpfh和SAC-IA计算较为缓慢,出结果需要四五分钟
这份配准所需点云文件链接:
链接:https://pan.baidu.com/s/1QduGSfYcMN2MLRa08e0eSg
提取码:wstc
六、保存配置
为了在以后新建项目时不重复进行第三部分的配置,可以保存属性表;点击visual studio2022的视图下的其他窗口,找到属性管理器,点击
下方会出现属性管理器的字样,点击
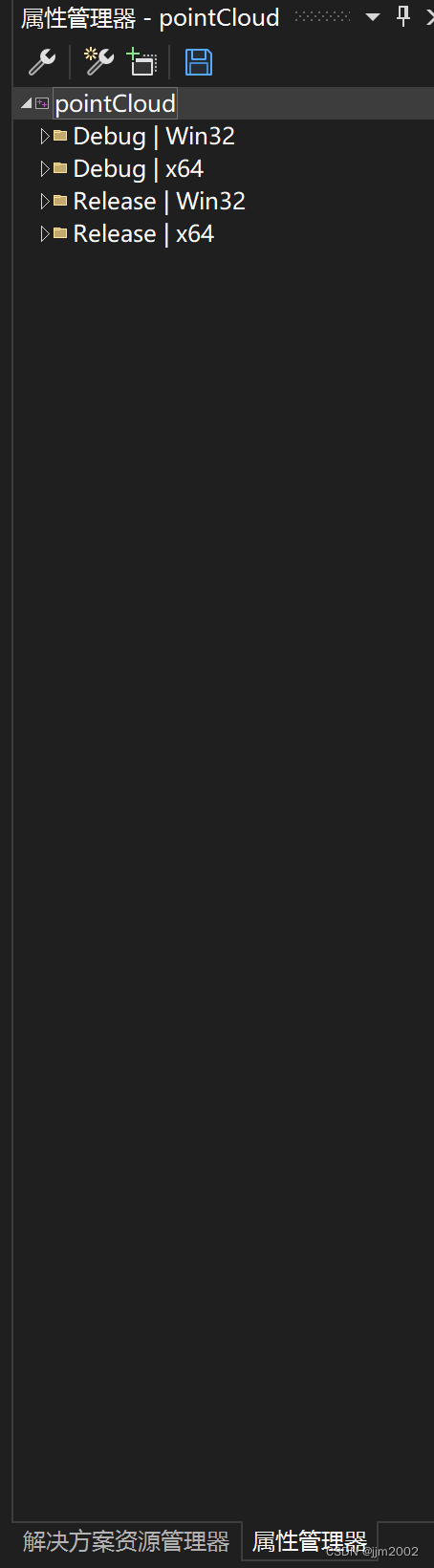
然后右键Debug | x64,点击添加新项目属性表

随便命个名,点击添加,我命名为PCL.props
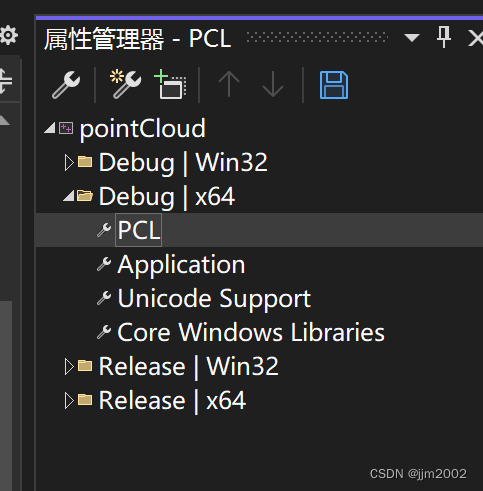
这里就会出现PCL的属性表,双击之后,重复,第三部分的配置即可,这个属性表会保存在和你的cpp文件的同级目录下
然后你就可以新建一个项目,在新项目中也找到Debug | x64,右键添加现有属性表,找到我们刚才配置的PCL.props,就可以导入我们刚才的配置了
六、未来如果你要用PCL做某些大型项目,可能会遇到 fatal error C1128: 节数超过对象文件格式限制: 请使用 /bigobj 进行编译,这种问题,解决方法:
打开该项目的“属性页”对话框,单击“C/C++”项,单击“命令行”属性页,在“附加选项”框中键入编译器选项,添加 /bigobj,再次编译即可。
在 Visual Studio 中使用 /bigobj 编译选项的主要好处是允许生成更大的对象文件。这是通过扩展 COFF(Common Object File Format)的限制来实现的。以下是 /bigobj 选项的一些具体好处:
-
增加节的数量限制: 正常情况下,COFF 格式的对象文件有限制,例如节的数量不能超过 2^16-1(65535)。使用
/bigobj可以将这个限制提高到 2^32-1(约 4.29 亿),这对于包含大量代码的大型项目非常有用。 -
提供更多的符号: 对于有大量符号(例如函数、变量、模板实例化)的代码,
/bigobj也提供了更多的符号支持。 -
处理复杂的模板: 使用大量模板特化和模板元编程的 C++ 代码可能会生成非常大的对象文件。
/bigobj让编译器能够处理这些复杂的模板情况。 -
适用于大型项目: 对于非常大的项目,尤其是那些有大量源代码文件或者是由多个库组合而成的项目,使用
/bigobj选项可以避免在编译过程中出现对象文件格式限制的错误。
使用 /bigobj 选项没有显著的缺点,除了可能会增加编译后的对象文件大小。然而,它确实是解决某些大型或复杂项目导致的对象文件格式限制问题的必要手段。如果你的项目没有遇到相关的编译限制问题,那么通常不需要使用这个选项。
PCL使用SAC-IA \ICP\NDT\GICP进行点云配准-CSDN博客
相关文章:
Windows10安装PCL1.14.0及点云配准
一、下载visual studio2022 下载网址:Visual Studio: 面向软件开发人员和 Teams 的 IDE 和代码编辑器 (microsoft.com) 安装的时候选择"使用C的桌面开发“,同时可以修改文件路径,可以放在D盘。修改文件路径的时候,共享组件、…...

C语言第二十二弹---指针(六)
✨个人主页: 熬夜学编程的小林 💗系列专栏: 【C语言详解】 【数据结构详解】 指针 1. 回调函数是什么? 2、qsort使用举例 2.1、使用qsort函数排序整型数据 2.2 使用qsort排序结构体数据 3、qsort函数的模拟实现 总结 1. 回…...

Qt Windows和Android使用MuPDF预览PDF文件
文章目录 1. Windows MuPDF编译2. Android MuPDF编译3. 引用 MuPDF 库4. 解析本地PDF文件 1. Windows MuPDF编译 使用如下命令将MuPDF的源码克隆到本地 git clone --recursive git://git.ghostscript.com/mupdf.git直接用VS,打开 mupdf/platform/win32/mupdf.sln …...

MongoDB聚合:$replaceWith
r e p l a c e W i t h ‘ 可以将输入文档替换为指定的文档。该操作可以替换输入文档的所有字段,包括 ‘ i d ‘ 字段。使用 ‘ replaceWith可以将输入文档替换为指定的文档。该操作可以替换输入文档的所有字段,包括_id字段。使用 replaceWith‘可以将输…...

Vue 进阶系列丨实现简易VueRouter
Vue 进阶系列教程将在本号持续发布,一起查漏补缺学个痛快!若您有遇到其它相关问题,非常欢迎在评论中留言讨论,达到帮助更多人的目的。若感本文对您有所帮助请点个赞吧! 2013年7月28日,尤雨溪第一次在 G…...

unity editor 编辑器 GUID localID LocalFileId 查找问题
//传入对象实例化ID 可以获取到 guid localid guid预设的ID localid 预设内的ID //这个方法有个问题如果在预设编辑器状态下 可能出现查不到 guid localid 原因可能 传入对象是是编辑状态下instanceid 并不是保存状态下的 UnityEditor.AssetDatabase.TryGetGUIDAndLocalF…...
【Mybatis】从0学习Mybatis(2)
前言 本篇文章是从0学习Mybatis的第一篇文章,由于篇幅太长CSDN会限流,因此我打算分开两期来写,这是第二期!第一期在这儿:【Mybatis】从0学习Mybatis(1)-CSDN博客 1.什么是ResultMap结果映射&am…...
ChatGPT高效提问—prompt常见用法(续篇九)
ChatGPT高效提问—prompt常见用法(续篇九) 如何准确地向大型语言模型提出问题,使其更好地理解我们的意图,从而得到期望的答案呢?编写有效的prompt的技巧,精心设计的prompt,获得期望的的答案。 1.1 增加条件 在各种prompt技巧中,增加条件是最常用的。在prompt中…...

echarts的title标题属性
echarts的title标题属性 title 标题组件,包含主标题和副标题。 位于 option对象第一层. title.text 设置主标题内容title.subtext 设置副标题内容 在 ECharts 2.x 中单个 ECharts 实例最多只能拥有一个标题组件。但是在 ECharts 3 中可以存在任意多个标题组件&am…...
【HTML+CSS】使用CSS中的Position与z-index轻松实现一个简单的自定义标题栏效果
🚀 个人主页 极客小俊 ✍🏻 作者简介:web开发者、设计师、技术分享博主 🐋 希望大家多多支持一下, 我们一起学习和进步!😄 🏅 如果文章对你有帮助的话,欢迎评论 💬点赞&a…...

从零开始:用 Rust 编写你的第一个 Web 服务
Rust 是一种现代、高性能的编程语言,近年来在 Web 开发领域也有了一席之地。本文将介绍如何使用 Rust 编写一个简单的 Web 程序,从搭建开发环境到创建第一个 Web 页面。 1. 开发环境搭建 首先,确保你已经安装了 Rust 工具链。你可以通过在终…...

机器学习复习(8)——逻辑回归
目录 逻辑函数(Logistic Function) 逻辑回归模型的假设函数 从逻辑回归模型转换到最大似然函数过程 最大似然函数方法 梯度下降 逻辑函数(Logistic Function) 首先,逻辑函数,也称为Sigmoid函数&#…...

深入解析MySQL 8:事务数据字典的变革
随着数据库技术的不断发展和完善,元数据的管理成为了一个日益重要的议题。在MySQL 8中,一项引人注目的新特性是引入了事务数据字典(Transaction Data Dictionary,简称TDD),它改变了元数据的管理方式&#x…...
jquery写表格,通过后端传值,并合并单元格
<!DOCTYPE html> <html> <head><title>Table Using jQuery</title><style>#tableWrapper {width: 100%;height: 200px; /* 设置表格容器的高度 */overflow: auto; /* 添加滚动条 */margin-top: -10px; /* 负的外边距值,根据实际…...
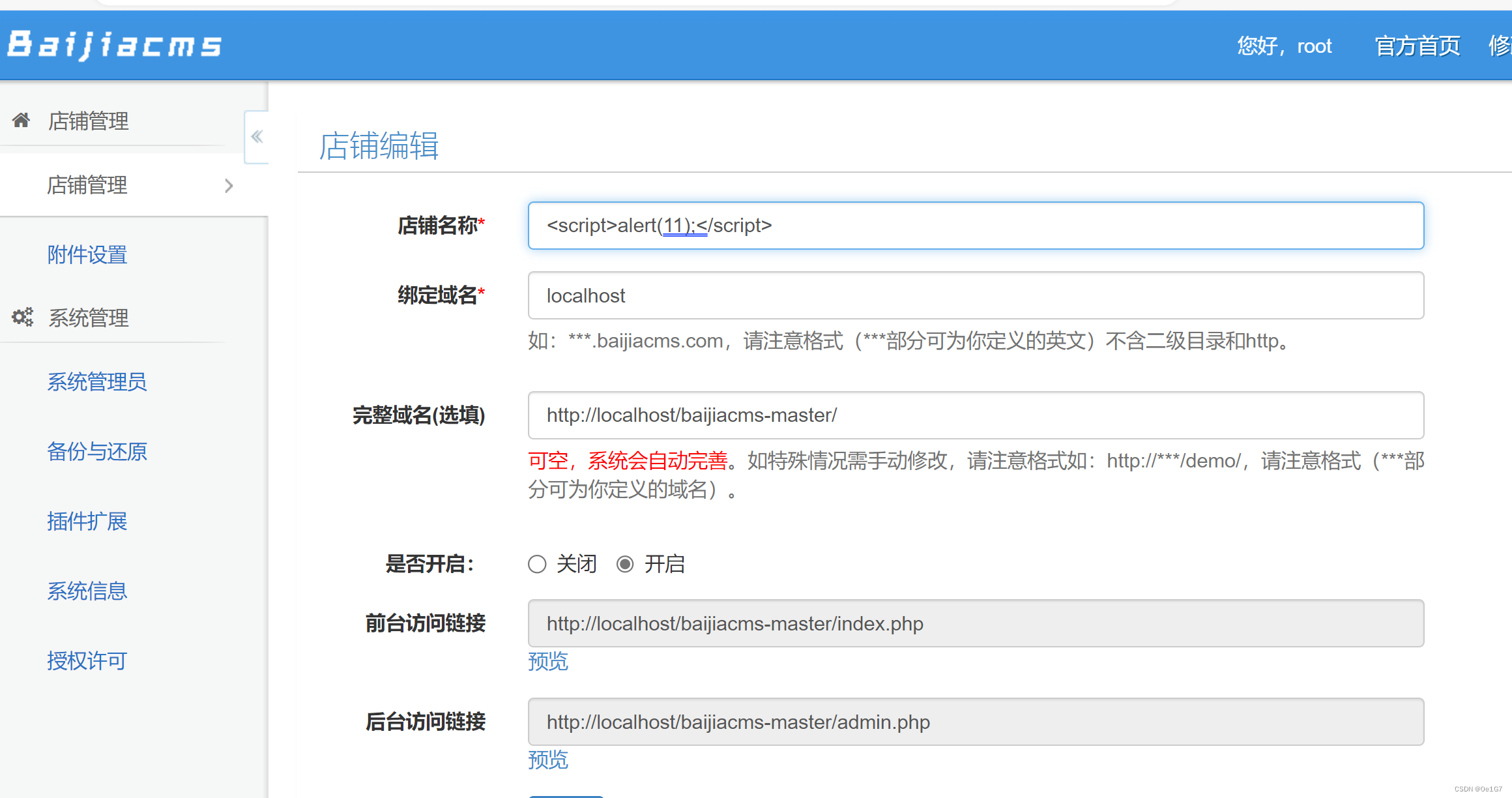
百家cms代审
参考博客: PHP代码审计之旅之百家CMS-腾讯云开发者社区-腾讯云 环境搭建 源码链接如下所示 https://gitee.com/openbaijia/baijiacms 安装至本地后 直接解压到phpstudy的www目录下即可 接下来去创建一个数据库用于存储CMS信息。(在Mysql命令行中执行…...
算法学习——LeetCode力扣二叉树篇3
算法学习——LeetCode力扣二叉树篇3 116. 填充每个节点的下一个右侧节点指针 116. 填充每个节点的下一个右侧节点指针 - 力扣(LeetCode) 描述 给定一个 完美二叉树 ,其所有叶子节点都在同一层,每个父节点都有两个子节点。二叉树…...

强制卸载挂载目录
当遇到磁盘卸载失败提示 device is busy fuser -a 显示所有命令行中指定的文件,默认情况下被访问的文件才会被显示。 -c 和-m一样,用于POSIX兼容。 -k 杀掉访问文件的进程。如果没有指定-signal就会发送SIGKILL信号。结合 –signal -signal 使用指定的信…...

HiveSQL——sum(if()) 条件累加
注:参考文章: HiveSql面试题10--sum(if)统计问题_hive sum if-CSDN博客文章浏览阅读5.8k次,点赞6次,收藏19次。0 需求分析t_order表结构字段名含义oid订单编号uid用户idotime订单时间(yyyy-MM-dd)oamount订…...

Linux命令行工具使用HTTP代理的方法详解
亲爱的Linux用户们,有没有想过在命令行世界里,你的每一个指令都能悄无声息地穿越千山万水,而不被外界窥探?哈哈,没错,就是通过HTTP代理!今天,我们就来一起探索如何在Linux命令行工具…...

idea mavn 中途新建gitignore文件如何生效
两种情况下项目代码中新建gitignore文件如何生效。 第一种情况项目代码下没有模块的情况 直接在该项目代码的根目录下进入git命令行执行: git rm -r --cached . git add . 注意上面两个命令后面都有一个点 第二种情况是有模块的情况 需要进入模块目录执行上…...

Ubuntu系统下交叉编译openssl
一、参考资料 OpenSSL&&libcurl库的交叉编译 - hesetone - 博客园 二、准备工作 1. 编译环境 宿主机:Ubuntu 20.04.6 LTSHost:ARM32位交叉编译器:arm-linux-gnueabihf-gcc-11.1.0 2. 设置交叉编译工具链 在交叉编译之前&#x…...

使用VSCode开发Django指南
使用VSCode开发Django指南 一、概述 Django 是一个高级 Python 框架,专为快速、安全和可扩展的 Web 开发而设计。Django 包含对 URL 路由、页面模板和数据处理的丰富支持。 本文将创建一个简单的 Django 应用,其中包含三个使用通用基本模板的页面。在此…...
【JVM】- 内存结构
引言 JVM:Java Virtual Machine 定义:Java虚拟机,Java二进制字节码的运行环境好处: 一次编写,到处运行自动内存管理,垃圾回收的功能数组下标越界检查(会抛异常,不会覆盖到其他代码…...

《用户共鸣指数(E)驱动品牌大模型种草:如何抢占大模型搜索结果情感高地》
在注意力分散、内容高度同质化的时代,情感连接已成为品牌破圈的关键通道。我们在服务大量品牌客户的过程中发现,消费者对内容的“有感”程度,正日益成为影响品牌传播效率与转化率的核心变量。在生成式AI驱动的内容生成与推荐环境中࿰…...
srs linux
下载编译运行 git clone https:///ossrs/srs.git ./configure --h265on make 编译完成后即可启动SRS # 启动 ./objs/srs -c conf/srs.conf # 查看日志 tail -n 30 -f ./objs/srs.log 开放端口 默认RTMP接收推流端口是1935,SRS管理页面端口是8080,可…...

服务器--宝塔命令
一、宝塔面板安装命令 ⚠️ 必须使用 root 用户 或 sudo 权限执行! sudo su - 1. CentOS 系统: yum install -y wget && wget -O install.sh http://download.bt.cn/install/install_6.0.sh && sh install.sh2. Ubuntu / Debian 系统…...

HarmonyOS运动开发:如何用mpchart绘制运动配速图表
##鸿蒙核心技术##运动开发##Sensor Service Kit(传感器服务)# 前言 在运动类应用中,运动数据的可视化是提升用户体验的重要环节。通过直观的图表展示运动过程中的关键数据,如配速、距离、卡路里消耗等,用户可以更清晰…...

Mysql中select查询语句的执行过程
目录 1、介绍 1.1、组件介绍 1.2、Sql执行顺序 2、执行流程 2.1. 连接与认证 2.2. 查询缓存 2.3. 语法解析(Parser) 2.4、执行sql 1. 预处理(Preprocessor) 2. 查询优化器(Optimizer) 3. 执行器…...
免费数学几何作图web平台
光锐软件免费数学工具,maths,数学制图,数学作图,几何作图,几何,AR开发,AR教育,增强现实,软件公司,XR,MR,VR,虚拟仿真,虚拟现实,混合现实,教育科技产品,职业模拟培训,高保真VR场景,结构互动课件,元宇宙http://xaglare.c…...
MySQL的pymysql操作
本章是MySQL的最后一章,MySQL到此完结,下一站Hadoop!!! 这章很简单,完整代码在最后,详细讲解之前python课程里面也有,感兴趣的可以往前找一下 一、查询操作 我们需要打开pycharm …...