蓝桥杯嵌入式第9届真题(完成) STM32G431
蓝桥杯嵌入式第9届真题(完成) STM32G431
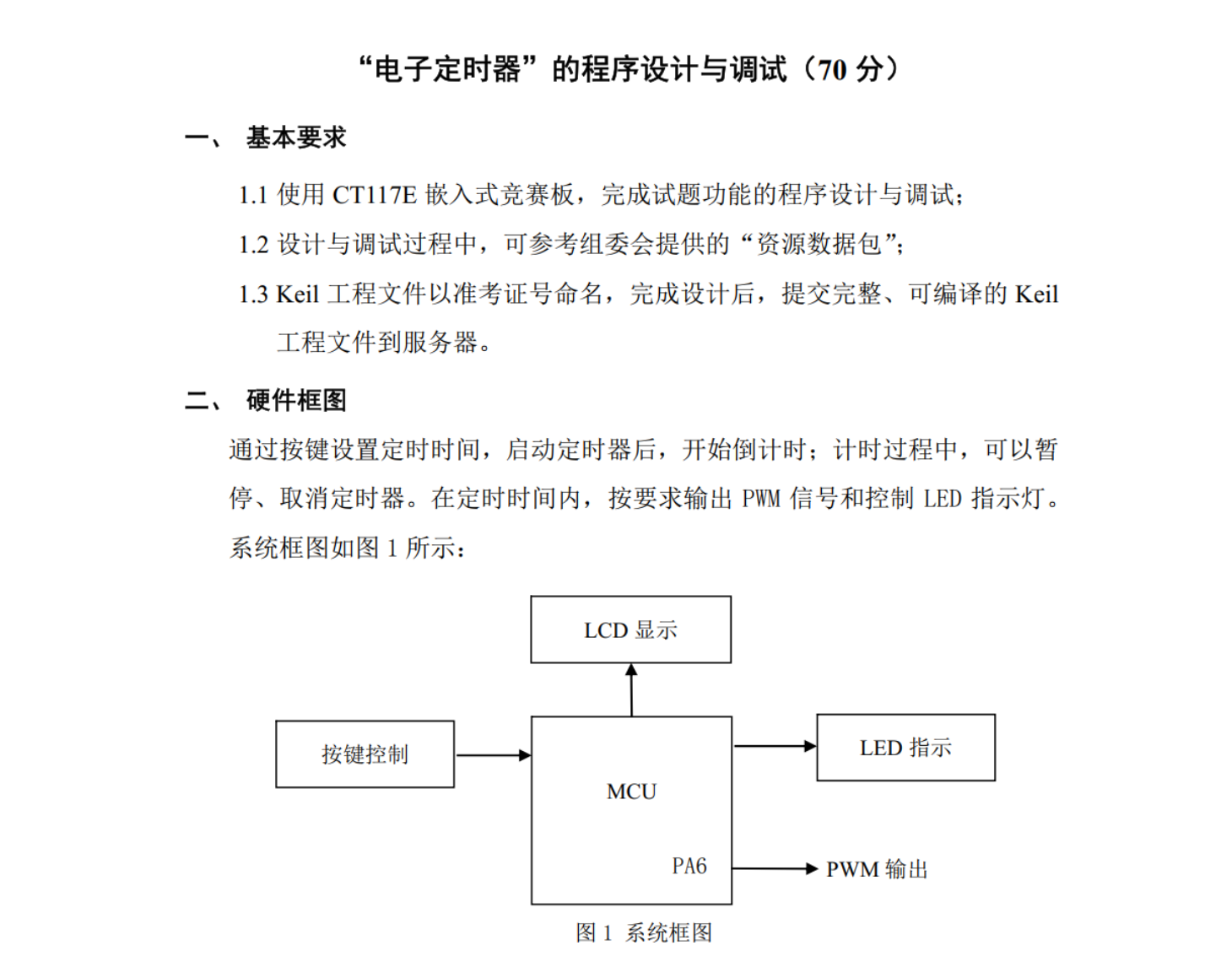
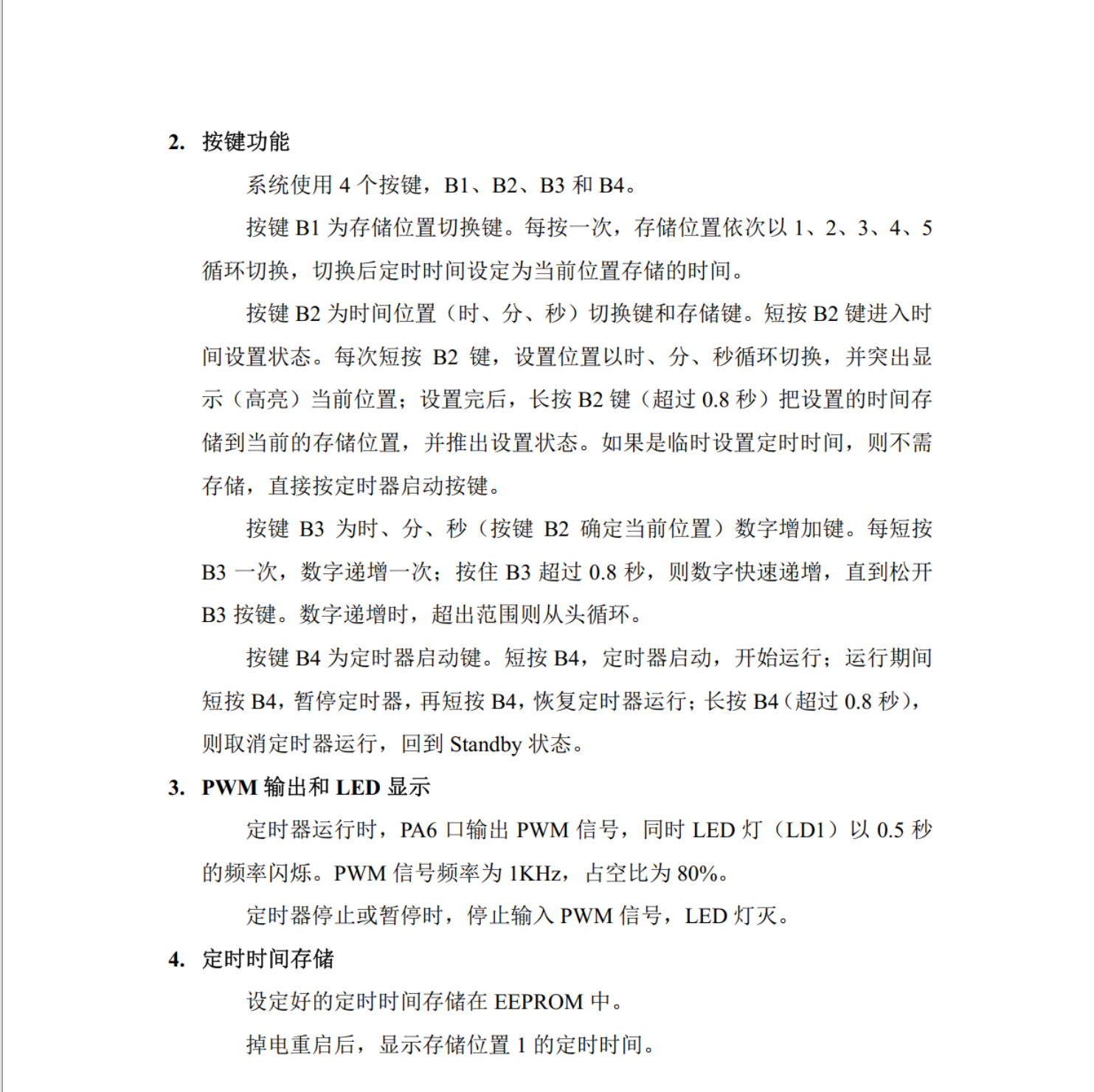
题目

分析和代码
main.h
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.h* @brief : Header for main.c file.* This file contains the common defines of the application.******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header *//* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __MAIN_H
#define __MAIN_H#ifdef __cplusplus
extern "C" {
#endif/* Includes ------------------------------------------------------------------*/
#include "stm32g4xx_hal.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "lcd.h"
/* USER CODE END Includes *//* Exported types ------------------------------------------------------------*/
/* USER CODE BEGIN ET */
struct Time{uint8_t hours;uint8_t minutes;uint8_t seconds;
};typedef enum {COUNTDOWN_STOPPED,COUNTDOWN_RUNNING,COUNTDOWN_PAUSED
} CountdownStatus;
/* USER CODE END ET *//* Exported constants --------------------------------------------------------*/
/* USER CODE BEGIN EC *//* USER CODE END EC *//* Exported macro ------------------------------------------------------------*/
/* USER CODE BEGIN EM *//* USER CODE END EM *//* Exported functions prototypes ---------------------------------------------*/
void Error_Handler(void);/* USER CODE BEGIN EFP *//* USER CODE END EFP *//* Private defines -----------------------------------------------------------*/
/* USER CODE BEGIN Private defines *//* USER CODE END Private defines */#ifdef __cplusplus
}
#endif#endif /* __MAIN_H *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/Time结构体定义了时间的数据类型,CountdownStatus是一个枚举类型,表示了定时器的三种状态
main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "key.h"
#include "led.h"
#include "stdio.h"
#include "i2c_hal.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
extern struct Key key[4];
uint8_t lcdtext[30];
uint8_t timerstatus[20]= "Standby";
uint8_t timernum = 0;
uint8_t view = 1;
CountdownStatus countdownStatus = COUNTDOWN_STOPPED; // 初始状态为停止
uint32_t ledtime;
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */struct Time time; //当前计时的时间
struct Time times[5];//存储五个准备好的定时时间
struct EeromAddr{uint8_t addr1;uint8_t addr2;uint8_t addr3;
} addr[5] = {{0x01, 0x02, 0x03}, // 第一个结构体的初值{0x04, 0x05, 0x06}, // 第二个结构体的初值{0x07, 0x08, 0x09}, // 第三个结构体的初值{0x0A, 0x0B, 0x0C}, // 第四个结构体的初值{0x0D, 0x0E, 0x0F} // 第五个结构体的初值
};
/* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void key_process(void);
void lcd_process(void);
void pwmAndLed_process(void);
/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void StartCountdown(void) {if (countdownStatus != COUNTDOWN_RUNNING) {countdownStatus = COUNTDOWN_RUNNING;sprintf((char *)timerstatus, "Running");}
}void PauseCountdown(void) {if (countdownStatus == COUNTDOWN_RUNNING) {countdownStatus = COUNTDOWN_PAUSED;sprintf((char *)timerstatus, "Pause");}
}void StopCountdown(void) {countdownStatus = COUNTDOWN_STOPPED;sprintf((char *)timerstatus, "Standby");
}void ReadFromEeprom(void)
{for (int i = 0; i < 5; i++) {times[i].hours = EEROM_Read(addr[i].addr1);HAL_Delay(5);times[i].minutes = EEROM_Read(addr[i].addr2);HAL_Delay(5);times[i].seconds = EEROM_Read(addr[i].addr3);HAL_Delay(5);}}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_TIM16_Init();/* USER CODE BEGIN 2 */LCD_Init();HAL_TIM_Base_Start_IT(&htim2);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);LED_display(0x00);// 假设EEROM_Read是您用来读取EEPROM数据的函数ReadFromEeprom();time = times[timernum];//默认是第一个while (1){pwmAndLed_process();lcd_process();key_process();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;RCC_OscInitStruct.PLL.PLLN = 20;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 */
void key_process(void)
{// 按键0:切换计时器编号并读取时间if (key[0].key_single_flag && view == 1) {key[0].key_single_flag = 0; // 清除标志位timernum = (timernum + 1) % 5; // 循环通过计时器编号LCD_Clear(Black);LCD_SetBackColor(Black); LCD_SetTextColor(White); // 从EEPROM读取时间ReadFromEeprom();time = times[timernum]; //加载存储的时间为当前时间}// 按键1(短按):在主视图切换到设置视图,或在设置视图中切换设置项if (key[1].key_single_flag) {key[1].key_single_flag = 0; // 清除标志位LCD_Clear(Black);LCD_SetBackColor(Black); // 根据需要设置背景色LCD_SetTextColor(White); // 根据需要设置文字色if (view == 1) {// 如果在主视图,进入设置模式view = 2; // 进入设置视图sprintf((char *)timerstatus, "Setting");time = times[timernum];} else if (view >= 2 && view < 5) {// 在设置模式下,循环切换设置项view++;} else if (view == 5) {// 如果已经在设置秒的视图,回到设置小时视图view = 3;}}// 按键1(长按):保存设置并返回主视图if (key[1].key_long_flag && (view >= 3 && view <= 5)) {key[1].key_long_flag = 0; // 清除标志位// 将当前时间写入EEPROMEEROM_Write(addr[timernum].addr1, time.hours);HAL_Delay(10);EEROM_Write(addr[timernum].addr2, time.minutes);HAL_Delay(10);EEROM_Write(addr[timernum].addr3, time.seconds);HAL_Delay(10);ReadFromEeprom();// 更新显示状态并返回主视图sprintf((char *)timerstatus, "Standby");// 清屏并准备显示主视图的信息LCD_Clear(Black);LCD_SetBackColor(Black); // 根据需要设置背景色LCD_SetTextColor(White); // 根据需要设置文字色view = 1;}// 按键2:根据当前视图调整时间if (key[2].key_single_flag) {key[2].key_single_flag = 0; // 清除标志位switch (view) {case 3: // 调整小时time.hours = (time.hours + 1) % 24;break;case 4: // 调整分钟time.minutes = (time.minutes + 1) % 60;break;case 5: // 调整秒time.seconds = (time.seconds + 1) % 60;break;}}// 处理B4的短按和长按事件
if (key[3].key_single_flag == 1) {key[3].key_single_flag = 0; // 清除短按标志位LCD_Clear(Black);LCD_SetBackColor(Black); // 根据需要设置背景色LCD_SetTextColor(White); // 根据需要设置文字色// 短按逻辑,用于开始、暂停和恢复倒计时if (view == 1 && countdownStatus == COUNTDOWN_STOPPED) {StartCountdown();//开始倒计时} else if (view == 1 && countdownStatus == COUNTDOWN_RUNNING) {PauseCountdown();} else if (view == 1 && countdownStatus == COUNTDOWN_PAUSED) {StartCountdown(); // 使用StartCountdown来恢复倒计时}
} else if (key[3].key_long_flag == 1) {key[3].key_long_flag = 0; // 清除长按标志位// 长按逻辑,用于取消倒计时并返回到初始状态if (view == 1) {StopCountdown();// 可能需要重置倒计时时间time.hours = times[timernum].hours;time.minutes = times[timernum].minutes;time.seconds = times[timernum].seconds ;}
}}void lcd_process(void)
{switch(view){case 1:{sprintf((char *)lcdtext," No %d",timernum+1);LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," %02d:%02d:%02d",time.hours,time.minutes,time.seconds);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," %s",timerstatus);LCD_DisplayStringLine(Line5,lcdtext);}break;case 2: //设置界面{sprintf((char *)lcdtext," No %d",timernum+1);LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," %02d:%02d:%02d",time.hours,time.minutes,time.seconds);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," %s",timerstatus);LCD_DisplayStringLine(Line5,lcdtext);}break;case 3: //设置小时{sprintf((char *)lcdtext," No %d",timernum+1);LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," %02d:%02d:%02d",time.hours,time.minutes,time.seconds);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," --");LCD_SetTextColor(Green);LCD_DisplayStringLine(Line4,lcdtext);LCD_SetTextColor(White);sprintf((char *)lcdtext," %s",timerstatus);LCD_DisplayStringLine(Line5,lcdtext);}break;case 4://设置分钟{sprintf((char *)lcdtext," No %d",timernum+1);LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," %02d:%02d:%02d",time.hours,time.minutes,time.seconds);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," --");LCD_SetTextColor(Green);LCD_DisplayStringLine(Line4,lcdtext);LCD_SetTextColor(White);sprintf((char *)lcdtext," %s",timerstatus);LCD_DisplayStringLine(Line5,lcdtext);}break;case 5://设置秒{sprintf((char *)lcdtext," No %d",timernum+1);LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," %02d:%02d:%02d",time.hours,time.minutes,time.seconds);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," --");LCD_SetTextColor(Green);LCD_DisplayStringLine(Line4,lcdtext);LCD_SetTextColor(White); sprintf((char *)lcdtext," %s",timerstatus);LCD_DisplayStringLine(Line5,lcdtext);}break;}}
void pwmAndLed_process(void)
{static _Bool ledflag = false;if(countdownStatus == COUNTDOWN_RUNNING){HAL_TIM_PWM_Start(&htim16, TIM_CHANNEL_1);__HAL_TIM_SET_COMPARE(&htim16,TIM_CHANNEL_1,800);if(uwTick-ledtime<500)return;ledtime = uwTick;//更新时间ledflag = !ledflag;if(ledflag){LED_display(0x01);}else{LED_display(0x00);}}else{HAL_TIM_PWM_Stop(&htim16, TIM_CHANNEL_1);LED_display(0x00);}
}/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state *//* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/EeromAddr是一个用于存储时间的小时分钟还有秒的数据地址,这个地址是EEPROM中的地址,题目要求可以设置五个默认的定时时间,struct Time times[5];用于存储五个定时时间,uint8_t timernum = 0;相当于一个指针,指向当前定时的时间,范围在times的范围0-4之间,time是当前使用的定时器的时间,view是屏幕显示状态的索引。
StartCountdown调用后开始计时,PauseCountdown调用后暂停计时,StopCountdown调用后停止计时
ReadFromEeprom用于将EEPROM中的存储的时间读取到times数组中,每次读取后与下一次读取需要有时间间隔防止实训混乱
key_process中按键以用于切换五个不同的定时时间,仅仅在view=1即展示状态才可以切换,使用mod运算timernum = (timernum + 1) % 5;保证timernum在0-4时间,为了防止后续修改与当前数组的值不同,每次按下按键以切换不同定时值时都需要调用ReadFromEeprom函数将times数组中的时间更新为最新的值
按下按键2后,通过判断不同的view确定不同的动作,当前在view=1展示状态下后点击按键2进入view=2设置状态,再次按下进入设置小时的状态下,之后每次按键按下都在设置小时、分钟、秒之间切换
如果长按按键2,保存当前设置的值到EEPROM中,同样每次写入时需要间隔一定时间,调用ReadFromEeprom更新times数组,回到view=1展示状态
按键3按下根据不同view设置时分秒的值
最后一个按键按键4,根据当前定时器的状态,控制短按需要执行的函数,同样只有view=1按下当前按键才有用,如果当前在停止或者暂停状态,短按按键4进入开始状态,然后短按暂停,长按停止同时将当前time的值设置为初始值
lcd_process中利用switch-case状态机模式显示不同的lcd状态
pwmAndLed_process用于处理pwm和led的状态,当countdownStatus == COUNTDOWN_RUNNING运行状态时,开始输出pwm设置占空比为80%,同时利用滴答定时器的UWTick来计时实现led以0.5s的周期闪烁,
led.h
#ifndef __LED_H
#define __LED_H#include "stm32g4xx_hal.h"
#include "main.h"
void LED_display(uint8_t led);
#endifled.c
#include "led.h"void LED_display(uint8_t led)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOC,led<<8,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
PD2是一个锁存器高电平打开引脚,设置的值才可以到led中
key.h
#ifndef __KEY_H
#define __KEY_H#include "stm32g4xx_hal.h"
#include "main.h"
#include "stdbool.h"struct Key{uint8_t key_status;bool key_gpio;bool key_single_flag;bool key_long_flag;uint8_t key_times;
};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
#endif比上次几个版本多了判断长时间按下和按下按键的时间
key.c
#include "key.h"
#define FAST_INCREMENT_PERIOD 10 // 快速增加的周期计数阈值
struct Key key[4]={0,0,0,0};
extern struct Time time;
extern uint8_t view;void IncreaseSettingValue(void) {// 根据当前设置的位置,递增小时、分钟或秒switch (view) {case 3:time.hours = (time.hours + 1) % 24;break;case 4:time.minutes = (time.minutes + 1) % 60;break;case 5:time.seconds = (time.seconds + 1) % 60;break;}}void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM2){key[0].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);key[1].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);key[2].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);key[3].key_gpio = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);for(int i = 0;i<4;i++){switch(key[i].key_status){case 0:{if(key[i].key_gpio==0){key[i].key_times = 0;//最新的一次按下key[i].key_status = 1;}}break;case 1:{if(key[i].key_gpio==0){key[i].key_status = 2;}else{key[i].key_status = 0;}}break;case 2:{if(key[i].key_gpio==1) //按键已经松开{key[i].key_status = 0;if(key[i].key_times<80){key[i].key_single_flag = 1;//短按}}else{ //按键没有松开,开始计时key[i].key_times++;if(key[i].key_times>80) //0.8s{key[i].key_long_flag = 1; //长按if (key[2].key_times % FAST_INCREMENT_PERIOD == 0) {IncreaseSettingValue(); }}}}break;}}}}在case2中按键如果没有松开开始计时,该定时器中断是10ms进入一次,key_times++一次相当于过去了10ms,所以判断key[i].key_times>80可以判断是否为长按,在长按中判断是不是按键3按下并且设置一个FAST_INCREMENT_PERIOD周期实现每100ms调用IncreaseSettingValue增加一次
i2c_hal.h
#ifndef __I2C_HAL_H
#define __I2C_HAL_H#include "stm32g4xx_hal.h"void I2CStart(void);
void I2CStop(void);
unsigned char I2CWaitAck(void);
void I2CSendAck(void);
void I2CSendNotAck(void);
void I2CSendByte(unsigned char cSendByte);
unsigned char I2CReceiveByte(void);
void I2CInit(void);
void EEROM_Write(uint8_t addr,uint8_t data);
uint8_t EEROM_Read(uint8_t addr);
#endifi2c_hal.c
/*程序说明: CT117E-M4嵌入式竞赛板GPIO模拟I2C总线驱动程序软件环境: MDK-ARM HAL库硬件环境: CT117E-M4嵌入式竞赛板日 期: 2020-3-1
*/#include "i2c_hal.h"#define DELAY_TIME 20/*** @brief SDA线输入模式配置* @param None* @retval None*/
void SDA_Input_Mode()
{GPIO_InitTypeDef GPIO_InitStructure = {0};GPIO_InitStructure.Pin = GPIO_PIN_7;GPIO_InitStructure.Mode = GPIO_MODE_INPUT;GPIO_InitStructure.Pull = GPIO_PULLUP;GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}/*** @brief SDA线输出模式配置* @param None* @retval None*/
void SDA_Output_Mode()
{GPIO_InitTypeDef GPIO_InitStructure = {0};GPIO_InitStructure.Pin = GPIO_PIN_7;GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStructure.Pull = GPIO_NOPULL;GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}/*** @brief SDA线输出一个位* @param val 输出的数据* @retval None*/
void SDA_Output( uint16_t val )
{if ( val ){GPIOB->BSRR |= GPIO_PIN_7;}else{GPIOB->BRR |= GPIO_PIN_7;}
}/*** @brief SCL线输出一个位* @param val 输出的数据* @retval None*/
void SCL_Output( uint16_t val )
{if ( val ){GPIOB->BSRR |= GPIO_PIN_6;}else{GPIOB->BRR |= GPIO_PIN_6;}
}/*** @brief SDA输入一位* @param None* @retval GPIO读入一位*/
uint8_t SDA_Input(void)
{if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET){return 1;}else{return 0;}
}/*** @brief I2C的短暂延时* @param None* @retval None*/
static void delay1(unsigned int n)
{uint32_t i;for ( i = 0; i < n; ++i);
}/*** @brief I2C起始信号* @param None* @retval None*/
void I2CStart(void)
{SDA_Output(1);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SDA_Output(0);delay1(DELAY_TIME);SCL_Output(0);delay1(DELAY_TIME);
}/*** @brief I2C结束信号* @param None* @retval None*/
void I2CStop(void)
{SCL_Output(0);delay1(DELAY_TIME);SDA_Output(0);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SDA_Output(1);delay1(DELAY_TIME);}/*** @brief I2C等待确认信号* @param None* @retval None*/
unsigned char I2CWaitAck(void)
{unsigned short cErrTime = 5;SDA_Input_Mode();delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);while(SDA_Input()){cErrTime--;delay1(DELAY_TIME);if (0 == cErrTime){SDA_Output_Mode();I2CStop();return ERROR;}}SDA_Output_Mode();SCL_Output(0);delay1(DELAY_TIME);return SUCCESS;
}/*** @brief I2C发送确认信号* @param None* @retval None*/
void I2CSendAck(void)
{SDA_Output(0);delay1(DELAY_TIME);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SCL_Output(0);delay1(DELAY_TIME);}/*** @brief I2C发送非确认信号* @param None* @retval None*/
void I2CSendNotAck(void)
{SDA_Output(1);delay1(DELAY_TIME);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SCL_Output(0);delay1(DELAY_TIME);}/*** @brief I2C发送一个字节* @param cSendByte 需要发送的字节* @retval None*/
void I2CSendByte(unsigned char cSendByte)
{unsigned char i = 8;while (i--){SCL_Output(0);delay1(DELAY_TIME);SDA_Output(cSendByte & 0x80);delay1(DELAY_TIME);cSendByte += cSendByte;delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);}SCL_Output(0);delay1(DELAY_TIME);
}/*** @brief I2C接收一个字节* @param None* @retval 接收到的字节*/
unsigned char I2CReceiveByte(void)
{unsigned char i = 8;unsigned char cR_Byte = 0;SDA_Input_Mode();while (i--){cR_Byte += cR_Byte;SCL_Output(0);delay1(DELAY_TIME);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);cR_Byte |= SDA_Input();}SCL_Output(0);delay1(DELAY_TIME);SDA_Output_Mode();return cR_Byte;
}//
void I2CInit(void)
{GPIO_InitTypeDef GPIO_InitStructure = {0};GPIO_InitStructure.Pin = GPIO_PIN_7 | GPIO_PIN_6;GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStructure.Pull = GPIO_PULLUP;GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}void EEROM_Write(uint8_t addr,uint8_t data)
{I2CStart();I2CSendByte(0xA0);I2CWaitAck();I2CSendByte(addr);I2CWaitAck();I2CSendByte(data);I2CWaitAck();I2CStop();
}uint8_t EEROM_Read(uint8_t addr)
{uint8_t data = 0; // 定义一个变量来存储接收到的数据I2CStart();I2CSendByte(0xA0);I2CWaitAck();I2CSendByte(addr);I2CWaitAck();I2CStop();I2CStart();I2CSendByte(0xA1);I2CWaitAck();data = I2CReceiveByte();I2CWaitAck();I2CStop();return data; // 返回接收到的数据
}
stm32g4xx_it.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file stm32g4xx_it.c* @brief Interrupt Service Routines.******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header *//* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32g4xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
extern struct Time time;
extern CountdownStatus countdownStatus;
/* USER CODE END TD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//* External variables --------------------------------------------------------*/
extern TIM_HandleTypeDef htim2;
/* USER CODE BEGIN EV *//* USER CODE END EV *//******************************************************************************/
/* Cortex-M4 Processor Interruption and Exception Handlers */
/******************************************************************************/
/*** @brief This function handles Non maskable interrupt.*/
void NMI_Handler(void)
{/* USER CODE BEGIN NonMaskableInt_IRQn 0 *//* USER CODE END NonMaskableInt_IRQn 0 *//* USER CODE BEGIN NonMaskableInt_IRQn 1 *//* USER CODE END NonMaskableInt_IRQn 1 */
}/*** @brief This function handles Hard fault interrupt.*/
void HardFault_Handler(void)
{/* USER CODE BEGIN HardFault_IRQn 0 *//* USER CODE END HardFault_IRQn 0 */while (1){/* USER CODE BEGIN W1_HardFault_IRQn 0 *//* USER CODE END W1_HardFault_IRQn 0 */}
}/*** @brief This function handles Memory management fault.*/
void MemManage_Handler(void)
{/* USER CODE BEGIN MemoryManagement_IRQn 0 *//* USER CODE END MemoryManagement_IRQn 0 */while (1){/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 *//* USER CODE END W1_MemoryManagement_IRQn 0 */}
}/*** @brief This function handles Prefetch fault, memory access fault.*/
void BusFault_Handler(void)
{/* USER CODE BEGIN BusFault_IRQn 0 *//* USER CODE END BusFault_IRQn 0 */while (1){/* USER CODE BEGIN W1_BusFault_IRQn 0 *//* USER CODE END W1_BusFault_IRQn 0 */}
}/*** @brief This function handles Undefined instruction or illegal state.*/
void UsageFault_Handler(void)
{/* USER CODE BEGIN UsageFault_IRQn 0 *//* USER CODE END UsageFault_IRQn 0 */while (1){/* USER CODE BEGIN W1_UsageFault_IRQn 0 *//* USER CODE END W1_UsageFault_IRQn 0 */}
}/*** @brief This function handles System service call via SWI instruction.*/
void SVC_Handler(void)
{/* USER CODE BEGIN SVCall_IRQn 0 *//* USER CODE END SVCall_IRQn 0 *//* USER CODE BEGIN SVCall_IRQn 1 *//* USER CODE END SVCall_IRQn 1 */
}/*** @brief This function handles Debug monitor.*/
void DebugMon_Handler(void)
{/* USER CODE BEGIN DebugMonitor_IRQn 0 *//* USER CODE END DebugMonitor_IRQn 0 *//* USER CODE BEGIN DebugMonitor_IRQn 1 *//* USER CODE END DebugMonitor_IRQn 1 */
}/*** @brief This function handles Pendable request for system service.*/
void PendSV_Handler(void)
{/* USER CODE BEGIN PendSV_IRQn 0 *//* USER CODE END PendSV_IRQn 0 *//* USER CODE BEGIN PendSV_IRQn 1 *//* USER CODE END PendSV_IRQn 1 */
}/*** @brief This function handles System tick timer.*/
void SysTick_Handler(void)
{/* USER CODE BEGIN SysTick_IRQn 0 */static uint32_t ticks = 0;if (countdownStatus == COUNTDOWN_RUNNING && ++ticks >= 1000) {ticks = 0; // 重置计数器// 倒计时逻辑if (time.seconds > 0) {time.seconds--;} else if (time.minutes > 0) {time.minutes--;time.seconds = 59;} else if (time.hours > 0) {time.hours--;time.minutes = 59;time.seconds = 59;} else {// 倒计时结束countdownStatus = COUNTDOWN_STOPPED;}}/* USER CODE END SysTick_IRQn 0 */HAL_IncTick();/* USER CODE BEGIN SysTick_IRQn 1 *//* USER CODE END SysTick_IRQn 1 */
}/******************************************************************************/
/* STM32G4xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32g4xx.s). */
/******************************************************************************//*** @brief This function handles TIM2 global interrupt.*/
void TIM2_IRQHandler(void)
{/* USER CODE BEGIN TIM2_IRQn 0 *//* USER CODE END TIM2_IRQn 0 */HAL_TIM_IRQHandler(&htim2);/* USER CODE BEGIN TIM2_IRQn 1 *//* USER CODE END TIM2_IRQn 1 */
}/* USER CODE BEGIN 1 *//* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/SysTick_Handler是1ms进入一次使用SysTick_Handler定时ticks累积到1000时代表过去了1s,在这里倒计时
相关文章:
蓝桥杯嵌入式第9届真题(完成) STM32G431
蓝桥杯嵌入式第9届真题(完成) STM32G431 题目 分析和代码 main.h /* USER CODE BEGIN Header */ /********************************************************************************* file : main.h* brief : Header for main.c file.* …...
电商小程序03登录页面开发
目录 1 创建应用2 创建页面3 首页功能搭建4 登录页搭建5 设置叠加效果总结 小程序开发在经过需求分析和数据源设计之后,就可以进入到页面开发的阶段了。首先我们需要开发登录的功能。 登录功能要求用户输入用户名和密码,勾选同意用户协议和隐私协议&…...

聊聊PowerJob的CleanService
序 本文主要研究一下PowerJob的CleanService CleanService Slf4j Service public class CleanService {private final DFsService dFsService;private final InstanceInfoRepository instanceInfoRepository;private final WorkflowInstanceInfoRepository workflowInstance…...

Qt QML学习(一):Qt Quick 与 QML 简介
参考引用 QML和Qt Quick快速入门全面认识 Qt Widgets、QML、Qt Quick 1. Qt Widgets、QML、Qt Quick 区别 1.1 QML 和 Qt Quick 是什么关系? 1.1.1 从概念上区分 QML 是一种用户界面规范和标记语言,它允许开发人员创建高性能、流畅的动画和具有视觉吸引…...

Kylin系统下Qt的各种中文问题解决思路
一、编译生成的程序运行,中文乱码 这个比较简单。 Windows下基本就是编码格式设置。ini中文问题,见QSettings读取ini中文key方法。 其他Linux版本没玩过,不清楚。Kylin系统下基本就是缺中文的字库。找个好的中文字库,放到目录下即可,系统目录/usr/lib/fonts,qt的安装目…...

C 练习实例69-约瑟夫环
题目:有n个人围成一圈,顺序排号。从第一个人开始报数(从1到3报数),凡报到3的人退出圈子,问最后留下的是原来第几号的那位。 代码: #include <stdio.h> int main() {int n8;int table[n]…...
【Qt Design】界面介绍
文章目录 前言Widget Box(工具箱)对象查看器Qt Design属性编译器sizePolicy内容 信号/槽编辑器资源浏览器ui文件编辑完窗口后查看代码在Pycharm中添加QtDesign 前言 Widget Box(工具箱) 提供很多控件 对象查看器 对象查看区域…...
Makefile编译原理 make 中的路径搜索_1
一.make中的路径搜索 问题:在实际的工程项目中,所有的源文件和头文件都放在同一个文件夹中吗? 实验1 : VPATH 引子 mhrubuntu:~/work/makefile1/17$ ll total 28 drwxrwxr-x 4 mhr mhr 4096 Apr 22 00:46 ./ drwxrwxr-x 7 mhr m…...
蓝桥杯每日一题------背包问题(一)
点击可观看配套视频讲解 背包问题 阅读小提示:这篇文章稍微有点长,希望可以对背包问题进行系统详细的讲解,在看的过程中如果有任何疑问请在评论区里指出。因为篇幅过长也可以进行选择性阅读,读取自己想要的那一部分即可。 前言…...

面试 JavaScript 框架八股文十问十答第八期
面试 JavaScript 框架八股文十问十答第八期 作者:程序员小白条,个人博客 相信看了本文后,对你的面试是有一定帮助的!关注专栏后就能收到持续更新! ⭐点赞⭐收藏⭐不迷路!⭐ 1)实现call、apply…...

【机器学习】单变量线性回归
文章目录 线性回归模型(linear regression model)损失/代价函数(cost function)——均方误差(mean squared error)梯度下降算法(gradient descent algorithm)参数(parame…...
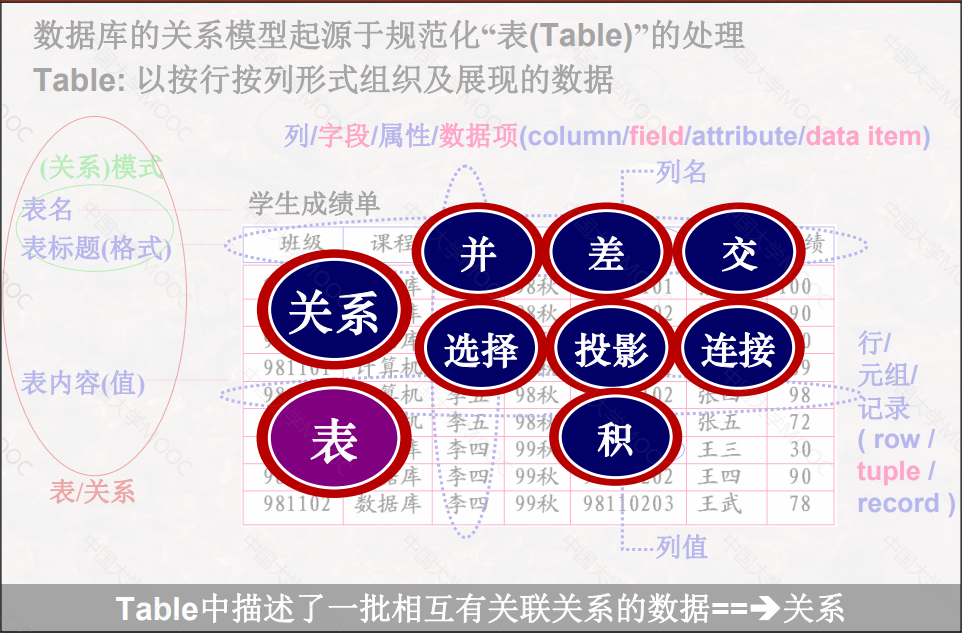
《计算思维导论》笔记:10.4 关系模型-关系运算
《大学计算机—计算思维导论》(战德臣 哈尔滨工业大学) 《10.4 关系模型-关系运算》 一、引言 本章介绍数据库的基本数据模型:关系模型-关系运算。 二、什么是关系运算 在数据库理论中,关系运算(Relational Operatio…...
)
QT+OSG/osgEarth编译之八十四:osgdb_osg+Qt编译(一套代码、一套框架,跨平台编译,版本:OSG-3.6.5插件库osgdb_osg)
文章目录 一、osgdb_osg介绍二、文件分析三、pro文件四、编译实践一、osgdb_osg介绍 osgDB是OpenSceneGraph(OSG)库中的一个模块,用于加载和保存3D场景数据。osgDB_osg是osgDB模块中的一个插件,它提供了对OSG格式的支持。 OSG格式是OpenSceneGraph库使用的一种二进制文件…...

【Redis快速入门】初识Redis、Redis安装、图形化界面
个人名片: 🐼作者简介:一名大三在校生,喜欢AI编程🎋 🐻❄️个人主页🥇:落798. 🐼个人WeChat:hmmwx53 🕊️系列专栏:🖼️…...
Linux(Ubuntu) 环境搭建:Nginx
注:服务器默认以root用户登录 NGINX 官方网站地址:https://nginx.org/en/NGINX 官方安装文档地址:https://nginx.org/en/docs/install.html服务器的终端中输入以下指令: # 安装 Nginx apt-get install nginx # 查看版本信息 ngi…...

快速手动完成 VS 编写脚本自动化:如何选取最高效的工作方式?
那些不懂技术的朋友们可能会觉得,写代码写脚本不就是敲敲键盘嘛,搞那么高科技做什么,直接手工点点鼠标不就完事了。 这种看法很常见,但实际情况要复杂得多。 首先,手工操作虽然对于短期和小规模的任务来说似乎更快&am…...
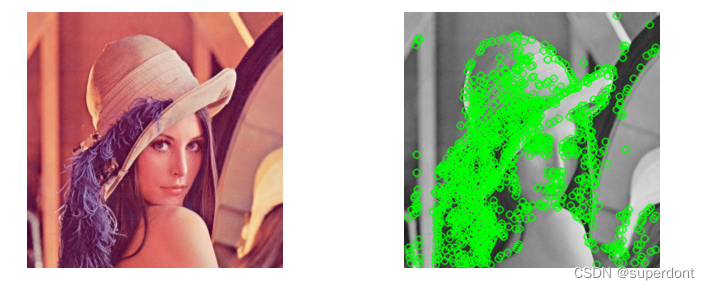
FAST角点检测算法
FAST(Features from Accelerated Segment Test)角点检测算法是一种快速且高效的角点检测方法。它通过检测每个像素周围的连续像素集合,确定是否为角点。以下是 FAST 角点检测算法的基本流程: FAST 角点检测算法的基本过程主要包括…...
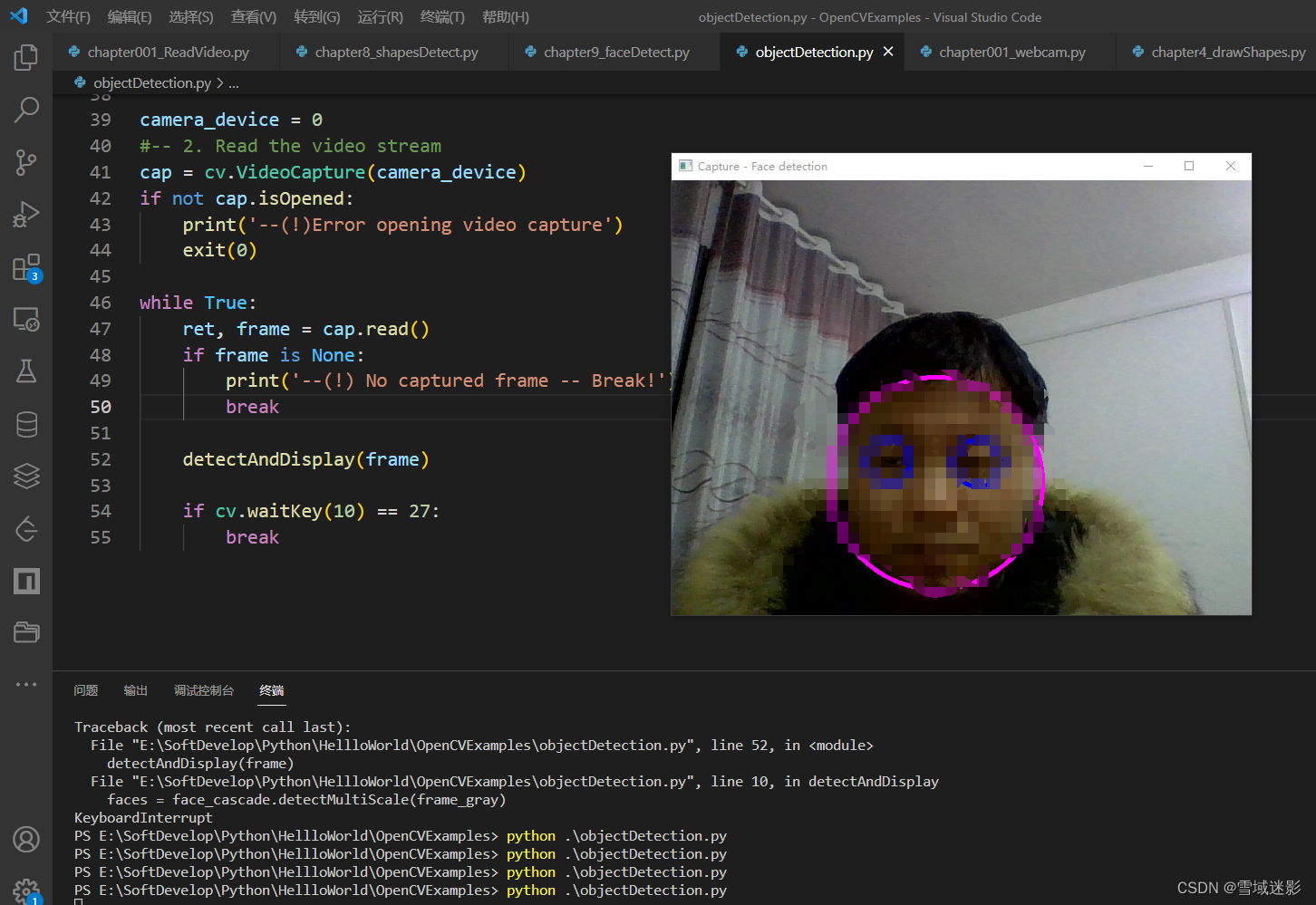
Python中使用opencv-python进行人脸检测
Python中使用opencv-python进行人脸检测 之前写过一篇VC中使用OpenCV进行人脸检测的博客。以数字图像处理中经常使用的lena图像为例,如下图所示: 使用OpenCV进行人脸检测十分简单,OpenCV官网给了一个Python人脸检测的示例程序,…...

牛客网 DP3跳台阶扩展问题
在原始跳台阶问题上,我们知道只走1,2阶台阶的话,可以推出来斐波那契数列的形式进行计算操作。但是,在这里就是1,2,3,...n阶台阶了。其实思路是一样的。 在原始台阶问题,我们的状态方…...

ARM汇编[1] 打印格式化字符串(printf
文章目录 写在前面关键知识简单加减乘除函数调用和循环系统调用栈的使用 GDB调试示例代码 写在前面 如果您对ARM汇编还一无所知的话请先参考ARM汇编hello world 本篇不会广泛详细的列举各种指令,仍然只讲解最关键的部分,然后使用他们来完成一个汇编程序…...

[特殊字符] 智能合约中的数据是如何在区块链中保持一致的?
🧠 智能合约中的数据是如何在区块链中保持一致的? 为什么所有区块链节点都能得出相同结果?合约调用这么复杂,状态真能保持一致吗?本篇带你从底层视角理解“状态一致性”的真相。 一、智能合约的数据存储在哪里…...

电脑插入多块移动硬盘后经常出现卡顿和蓝屏
当电脑在插入多块移动硬盘后频繁出现卡顿和蓝屏问题时,可能涉及硬件资源冲突、驱动兼容性、供电不足或系统设置等多方面原因。以下是逐步排查和解决方案: 1. 检查电源供电问题 问题原因:多块移动硬盘同时运行可能导致USB接口供电不足&#x…...

Qt Http Server模块功能及架构
Qt Http Server 是 Qt 6.0 中引入的一个新模块,它提供了一个轻量级的 HTTP 服务器实现,主要用于构建基于 HTTP 的应用程序和服务。 功能介绍: 主要功能 HTTP服务器功能: 支持 HTTP/1.1 协议 简单的请求/响应处理模型 支持 GET…...

NFT模式:数字资产确权与链游经济系统构建
NFT模式:数字资产确权与链游经济系统构建 ——从技术架构到可持续生态的范式革命 一、确权技术革新:构建可信数字资产基石 1. 区块链底层架构的进化 跨链互操作协议:基于LayerZero协议实现以太坊、Solana等公链资产互通,通过零知…...

技术栈RabbitMq的介绍和使用
目录 1. 什么是消息队列?2. 消息队列的优点3. RabbitMQ 消息队列概述4. RabbitMQ 安装5. Exchange 四种类型5.1 direct 精准匹配5.2 fanout 广播5.3 topic 正则匹配 6. RabbitMQ 队列模式6.1 简单队列模式6.2 工作队列模式6.3 发布/订阅模式6.4 路由模式6.5 主题模式…...

华为OD机考-机房布局
import java.util.*;public class DemoTest5 {public static void main(String[] args) {Scanner in new Scanner(System.in);// 注意 hasNext 和 hasNextLine 的区别while (in.hasNextLine()) { // 注意 while 处理多个 caseSystem.out.println(solve(in.nextLine()));}}priv…...

Redis:现代应用开发的高效内存数据存储利器
一、Redis的起源与发展 Redis最初由意大利程序员Salvatore Sanfilippo在2009年开发,其初衷是为了满足他自己的一个项目需求,即需要一个高性能的键值存储系统来解决传统数据库在高并发场景下的性能瓶颈。随着项目的开源,Redis凭借其简单易用、…...

MySQL:分区的基本使用
目录 一、什么是分区二、有什么作用三、分类四、创建分区五、删除分区 一、什么是分区 MySQL 分区(Partitioning)是一种将单张表的数据逻辑上拆分成多个物理部分的技术。这些物理部分(分区)可以独立存储、管理和优化,…...

【SpringBoot自动化部署】
SpringBoot自动化部署方法 使用Jenkins进行持续集成与部署 Jenkins是最常用的自动化部署工具之一,能够实现代码拉取、构建、测试和部署的全流程自动化。 配置Jenkins任务时,需要添加Git仓库地址和凭证,设置构建触发器(如GitHub…...
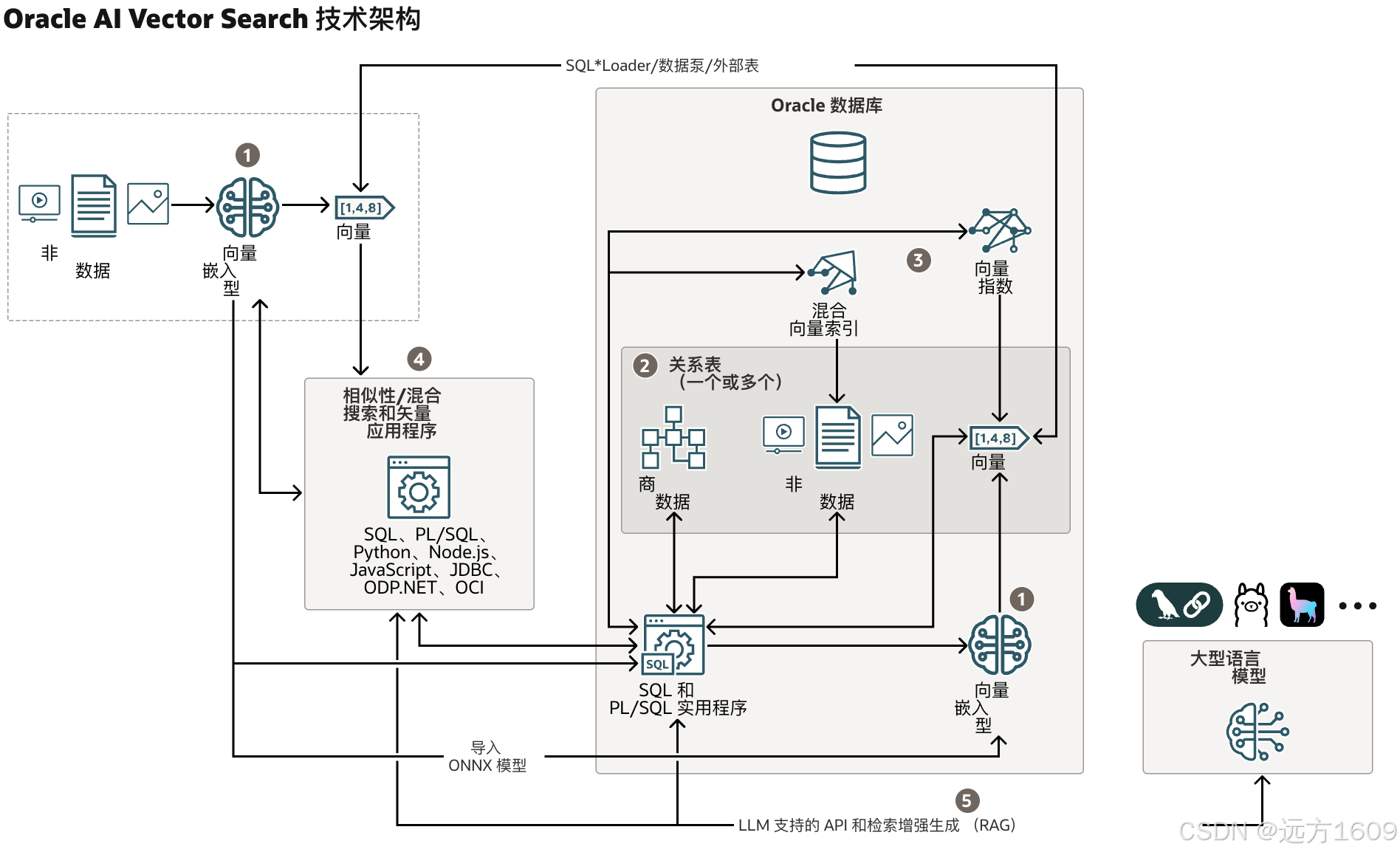
9-Oracle 23 ai Vector Search 特性 知识准备
很多小伙伴是不是参加了 免费认证课程(限时至2025/5/15) Oracle AI Vector Search 1Z0-184-25考试,都顺利拿到certified了没。 各行各业的AI 大模型的到来,传统的数据库中的SQL还能不能打,结构化和非结构的话数据如何和…...