实现linux platform tree框架下ICM20608驱动开发(SPI)
目录
概述
1 硬件接口
2 添加ICM20608的设备树信息
2.1 使用i.MX Pins Tool v6配置SPI引脚
2.2 配置设备树
2.3 编译.dts
2.4 在板卡中更新设备树
3 编写驱动程序
3.1 创建设备匹配表
3.2 重要函数介绍
3.2.1 初始化函数
3.2.2 写寄存器函数
3.2.3 读寄存器函数
3.2.3 完整驱动代码
3.2.3.1 驱动代码程序
3.2.3.1 驱动代码程序Makefile
4 测试驱动安装
4.1 编译驱动程序
4.2 在板卡上安装驱动
5 验证和测试
5.1 编写测试程序
5.1.1 测试程序源代码
5.1.2 测试程序Makefile
5.2 运行测试代码
5.3 结论
概述
本文详细介绍了如何在Linux platform tree框架下,编写一个基于SPI接口的驱动程序。笔者使用ICM20606芯片,应用SPI工作方式操作该芯片,实现其驱动程序。还编写了一个测试程序,并在板卡上运行测试程序。验证驱动的可靠性。
源代码地址: ICM20608linux环境下的驱动程序资源-CSDN文库
ICM20608linux环境下的测试程序资源-CSDN文库
1 硬件接口
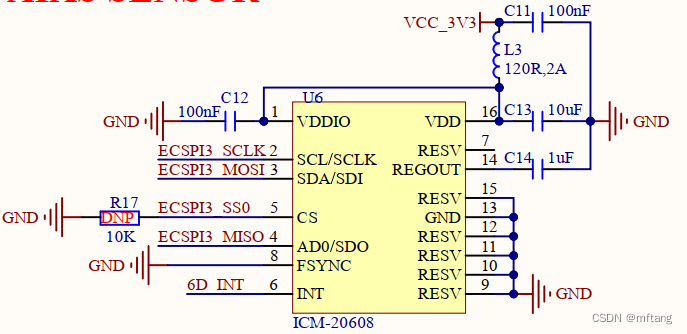
本文主要使用SPI总线驱动ICM20608芯片,如下内容会详细介绍设备树更新,驱动代码的实现等内容。由原理图可得,ICM20608与MCU的对应关系如下:
| ICM20608 | MCU | 注释 |
| SDO | MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO | 主设备输入、从设备输出线 |
| SDI | MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI | 主设备输出、从设备输入线 |
| SCLK | MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK | 时钟线 |
| CS | MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 | 从设备选择线 |
| INT | JTAG_MOD_SP_TX | 中断引脚 |
板卡上ICM-20608的原理图
2 添加ICM20608的设备树信息
2.1 使用i.MX Pins Tool v6配置SPI引脚
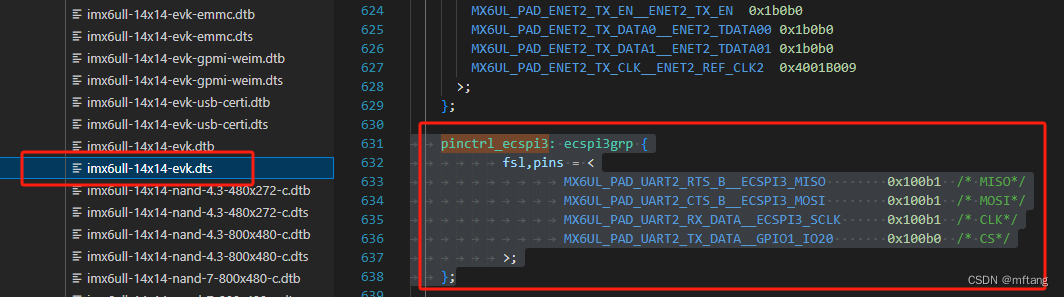
使用i.MX Pins Tool v6配置引脚,配置对应的引脚为SPI,配置参数如下:
pinctrl_ecspi3: ecspi3grp {fsl,pins = <MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO 0x100b1 /* MISO*/MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI 0x100b1 /* MOSI*/MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK 0x100b1 /* CLK */MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 0x100b0 /* CS */>;};在.dts文件中的位置为:
2.2 配置设备树
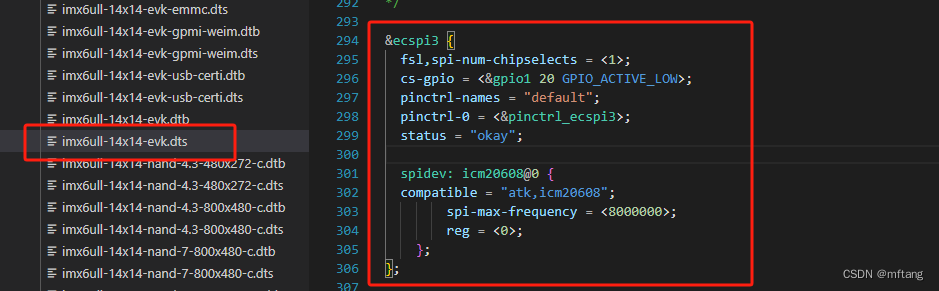
配置设备树的目的,是将SPI的工作IO引脚和外围的设备对应起来,方便在驱动程序中匹配该参数信息。在.dts文件中添加如下代码:
&ecspi3 {fsl,spi-num-chipselects = <1>;cs-gpio = <&gpio1 20 GPIO_ACTIVE_LOW>;pinctrl-names = "default";pinctrl-0 = <&pinctrl_ecspi3>;status = "okay";spidev: icm20608@0 {compatible = "atk,icm20608";spi-max-frequency = <8000000>;reg = <0>;};
};spi的配置参数在.dts文件中的位置为:
2.3 编译.dts
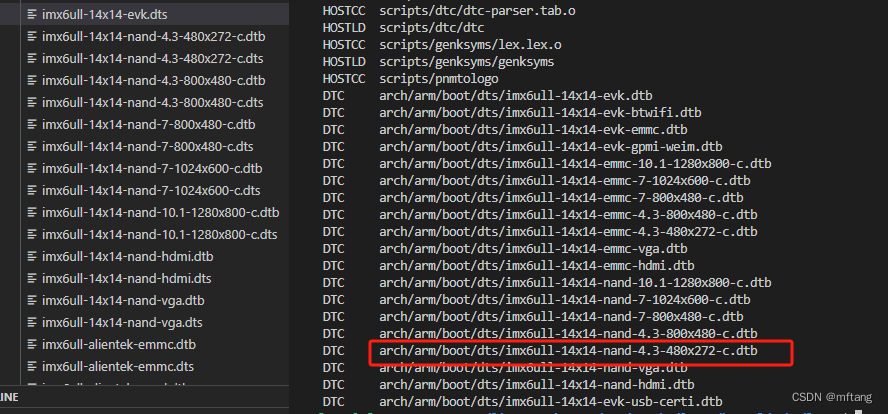
使用命令编译代码。然后将生成的.dtb文件发送到NFS的共享目录下,方便在板卡使用该文件
make dtbs编译后,得到了.dtb
2.4 在板卡中更新设备树
1) 将NFS中共享的设备树文件copy到运行目录中

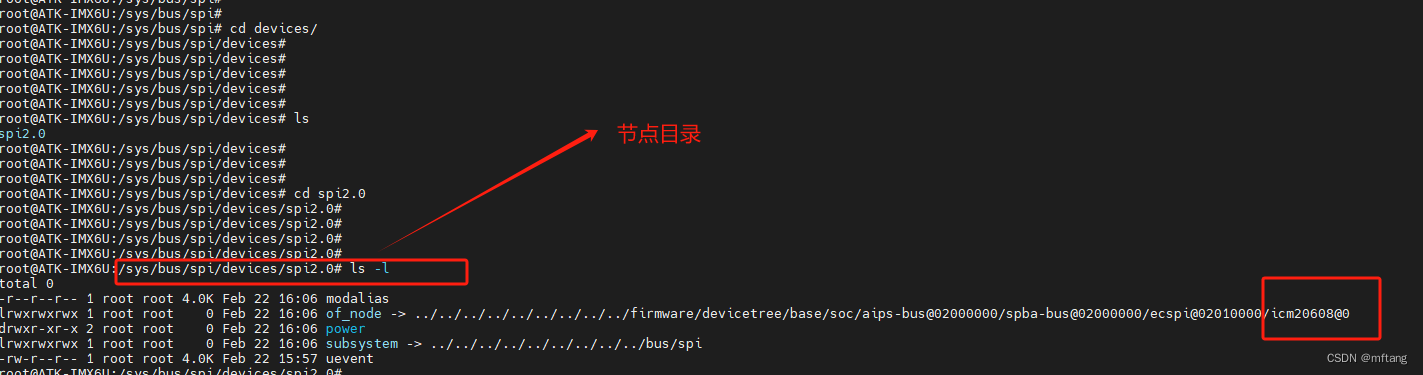
2)reboot板卡后,内核会重新读取.dtb文件。然后在/sys/bus/spi/devices/spi2.0目录下查看板卡device tree,使用如下命令:
cd /sys/bus/spi/devices/spi2.0/
ls -l得到节点信息如下:
3 编写驱动程序
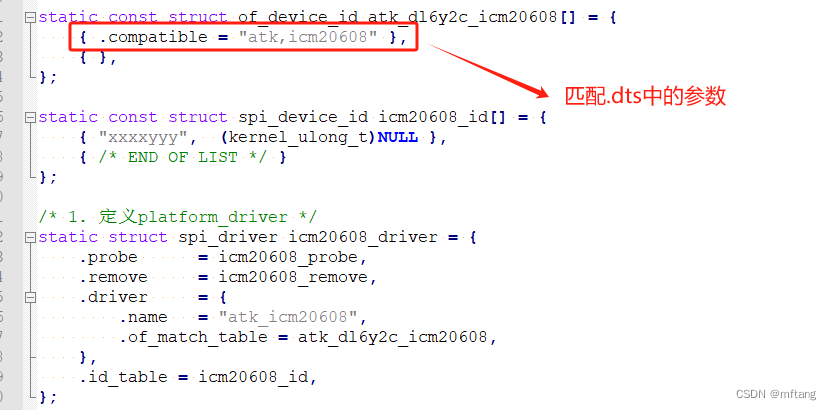
3.1 创建设备匹配表
其目的是和设备树中参数对应起来
static const struct of_device_id atk_dl6y2c_icm20608[] = {{ .compatible = "atk,icm20608" },{ },
};static const struct spi_device_id icm20608_id[] = {{ "xxxxyyy", (kernel_ulong_t)NULL },{ /* END OF LIST */ }
};/* 1. 定义platform_driver */
static struct i2c_driver icm20608_driver = {.probe = icm20608_probe,.remove = icm20608_remove,.driver = {.name = "atk_icm20608",.of_match_table = atk_dl6y2c_icm20608,},.id_table = icm20608_id,
};在.c 文件中的代码信息如下:
3.2 重要函数介绍
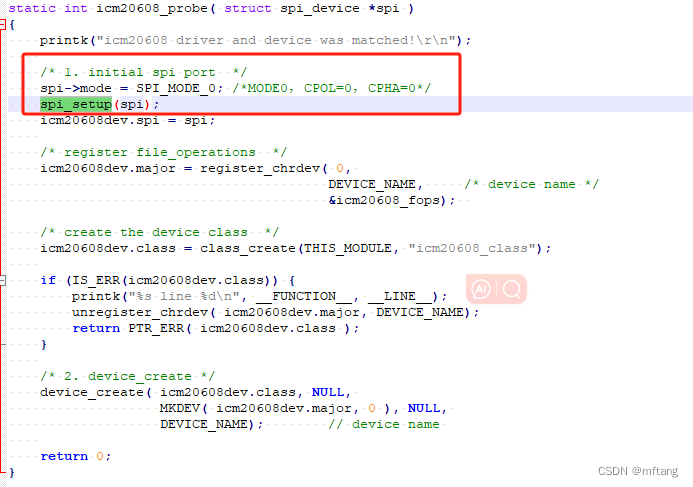
3.2.1 初始化函数
在初始化函数中,通过调用spi_setup 来初始化spi接口,该函数放在prope接口中完成
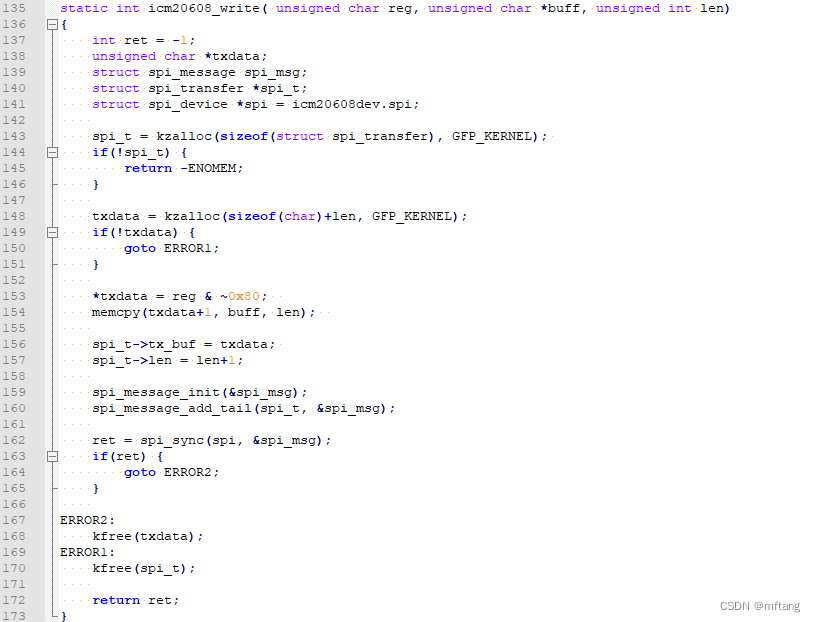
3.2.2 写寄存器函数
第148行,写寄存器数据时,寄存器地址信息,bit-7必须为0
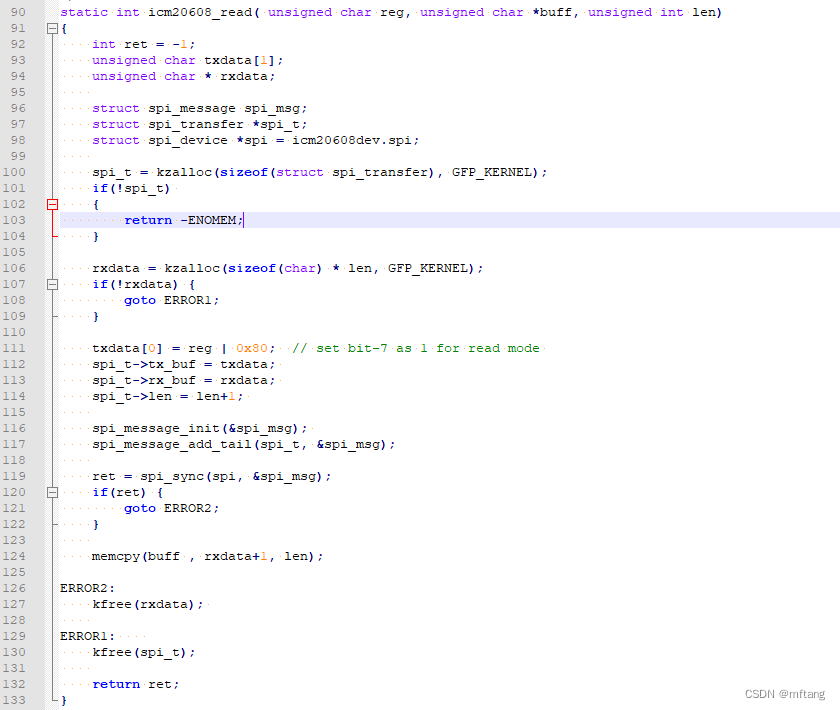
3.2.3 读寄存器函数
第111行,读寄存器数据时,必须传递一个寄存器地址信息,且bit-7必须为1
3.2.3 完整驱动代码
3.2.3.1 驱动代码程序
/***************************************************************
Copyright 2024-2029. All rights reserved.
文件名 : drv_17_icm20608.c
作者 : tangmingfei2013@126.com
版本 : V1.0
描述 : icm20608 驱动程序
其他 : 无
日志 : 初版V1.0 2024/1/30 使用方法:
1) 在.dts文件中定义节点信息
&ecspi3 {fsl,spi-num-chipselects = <1>;cs-gpio = <&gpio1 20 GPIO_ACTIVE_LOW>;pinctrl-names = "default";pinctrl-0 = <&pinctrl_ecspi3>;status = "okay";spidev: icm20608@0 {compatible = "atk,icm20608";spi-max-frequency = <8000000>;reg = <0>;};
};2) 在驱动匹配列表
static const struct of_device_id icm20608_of_match[] = {{ .compatible = "atk,icm20608" },{ } // Sentinel
};
***************************************************************/
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ktime.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/irq.h>
#include <linux/wait.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/fcntl.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include <linux/spi/spi.h>
#include <linux/of.h>
#include <linux/of_address.h>#define ICM20_SELF_TEST_X_GYRO 0x00
#define ICM20_SELF_TEST_Y_GYRO 0x01
#define ICM20_SELF_TEST_Z_GYRO 0x02
#define ICM20_SELF_TEST_X_ACCEL 0x0D
#define ICM20_SELF_TEST_Y_ACCEL 0x0E
#define ICM20_SELF_TEST_Z_ACCEL 0x0F/* 陀螺仪静态偏移 */
#define ICM20_XG_OFFS_USRH 0x13
#define ICM20_XG_OFFS_USRL 0x14
#define ICM20_YG_OFFS_USRH 0x15
#define ICM20_YG_OFFS_USRL 0x16
#define ICM20_ZG_OFFS_USRH 0x17
#define ICM20_ZG_OFFS_USRL 0x18#define ICM20_SMPLRT_DIV 0x19
#define ICM20_CONFIG 0x1A
#define ICM20_GYRO_CONFIG 0x1B
#define ICM20_ACCEL_CONFIG 0x1C
#define ICM20_ACCEL_CONFIG2 0x1D
#define ICM20_LP_MODE_CFG 0x1E
#define ICM20_ACCEL_WOM_THR 0x1F
#define ICM20_FIFO_EN 0x23
#define ICM20_FSYNC_INT 0x36
#define ICM20_INT_PIN_CFG 0x37
#define ICM20_INT_ENABLE 0x38
#define ICM20_INT_STATUS 0x3A/* 加速度输出 */
#define ICM20_ACCEL_XOUT_H 0x3B
#define ICM20_ACCEL_XOUT_L 0x3C
#define ICM20_ACCEL_YOUT_H 0x3D
#define ICM20_ACCEL_YOUT_L 0x3E
#define ICM20_ACCEL_ZOUT_H 0x3F
#define ICM20_ACCEL_ZOUT_L 0x40/* 温度输出 */
#define ICM20_TEMP_OUT_H 0x41
#define ICM20_TEMP_OUT_L 0x42/* 陀螺仪输出 */
#define ICM20_GYRO_XOUT_H 0x43
#define ICM20_GYRO_XOUT_L 0x44
#define ICM20_GYRO_YOUT_H 0x45
#define ICM20_GYRO_YOUT_L 0x46
#define ICM20_GYRO_ZOUT_H 0x47
#define ICM20_GYRO_ZOUT_L 0x48#define ICM20_SIGNAL_PATH_RESET 0x68
#define ICM20_ACCEL_INTEL_CTRL 0x69
#define ICM20_USER_CTRL 0x6A
#define ICM20_PWR_MGMT_1 0x6B
#define ICM20_PWR_MGMT_2 0x6C
#define ICM20_FIFO_COUNTH 0x72
#define ICM20_FIFO_COUNTL 0x73
#define ICM20_FIFO_R_W 0x74
#define ICM20_WHO_AM_I 0x75/* 加速度静态偏移 */
#define ICM20_XA_OFFSET_H 0x77
#define ICM20_XA_OFFSET_L 0x78
#define ICM20_YA_OFFSET_H 0x7A
#define ICM20_YA_OFFSET_L 0x7B
#define ICM20_ZA_OFFSET_H 0x7D
#define ICM20_ZA_OFFSET_L 0x7E#define DEVICE_NAME "icm20608" // dev/icm20608/* icm20608dev设备结构体 */
struct icm20608stru_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */struct spi_device *spi;
};struct icm20608stru_value{signed int gyro_x_adc; /* 陀螺仪X轴原始值 */signed int gyro_y_adc; /* 陀螺仪Y轴原始值 */signed int gyro_z_adc; /* 陀螺仪Z轴原始值 */signed int accel_x_adc; /* 加速度计X轴原始值 */signed int accel_y_adc; /* 加速度计Y轴原始值 */signed int accel_z_adc; /* 加速度计Z轴原始值 */signed int temp_adc; /* 温度原始值 */
};/* read or write icm20608 structure */static struct icm20608stru_dev icm20608dev;/*icm20608 driver
*/
static int icm20608_read( unsigned char reg, unsigned char *buff, unsigned int len)
{int ret = -1;unsigned char txdata[1];unsigned char * rxdata;struct spi_message spi_msg;struct spi_transfer *spi_t;struct spi_device *spi = icm20608dev.spi;spi_t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL);if(!spi_t) {return -ENOMEM;}rxdata = kzalloc(sizeof(char) * len, GFP_KERNEL);if(!rxdata) {goto ERROR1;}txdata[0] = reg | 0x80; // set bit-7 as 1 for read mode spi_t->tx_buf = txdata; spi_t->rx_buf = rxdata; spi_t->len = len+1; spi_message_init(&spi_msg); spi_message_add_tail(spi_t, &spi_msg);ret = spi_sync(spi, &spi_msg);if(ret) {goto ERROR2;}memcpy(buff , rxdata+1, len);ERROR2:kfree(rxdata); ERROR1: kfree(spi_t);return ret;
}static int icm20608_write( unsigned char reg, unsigned char *buff, unsigned int len)
{int ret = -1;unsigned char *txdata;struct spi_message spi_msg;struct spi_transfer *spi_t;struct spi_device *spi = icm20608dev.spi;spi_t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL); if(!spi_t) {return -ENOMEM;}txdata = kzalloc(sizeof(char)+len, GFP_KERNEL);if(!txdata) {goto ERROR1;}*txdata = reg & ~0x80; memcpy(txdata+1, buff, len); spi_t->tx_buf = txdata; spi_t->len = len+1;spi_message_init(&spi_msg);spi_message_add_tail(spi_t, &spi_msg);ret = spi_sync(spi, &spi_msg);if(ret) {goto ERROR2;}ERROR2:kfree(txdata);
ERROR1:kfree(spi_t);return ret;
}static void icm20608_readdata(struct icm20608stru_value *dev)
{unsigned char data[14] = { 0 };icm20608_read(ICM20_ACCEL_XOUT_H, data, 14);dev->accel_x_adc = (signed short)((data[0] << 8) | data[1]); dev->accel_y_adc = (signed short)((data[2] << 8) | data[3]); dev->accel_z_adc = (signed short)((data[4] << 8) | data[5]); dev->temp_adc = (signed short)((data[6] << 8) | data[7]); dev->gyro_x_adc = (signed short)((data[8] << 8) | data[9]); dev->gyro_y_adc = (signed short)((data[10] << 8) | data[11]);dev->gyro_z_adc = (signed short)((data[12] << 8) | data[13]);
}static void icm20608_reginit(void)
{unsigned char value = 0;unsigned char buff[1];buff[0] = 0x80;icm20608_write( ICM20_PWR_MGMT_1, buff , 1);mdelay(50);buff[0] = 0x01;icm20608_write( ICM20_PWR_MGMT_1, buff , 1);mdelay(50);icm20608_read(ICM20_WHO_AM_I, &value, 1);printk("ICM20608 ID = %#X\r\n", value); buff[0] = 0x00;icm20608_write( ICM20_SMPLRT_DIV, buff, 1);buff[0] = 0x18;icm20608_write( ICM20_GYRO_CONFIG, buff, 1);buff[0] = 0x18;icm20608_write( ICM20_ACCEL_CONFIG, buff, 1);buff[0] = 0x04;icm20608_write( ICM20_CONFIG, buff, 1);buff[0] = 0x04;icm20608_write( ICM20_ACCEL_CONFIG2, buff, 1);buff[0] = 0x00;icm20608_write( ICM20_PWR_MGMT_2, buff, 1);buff[0] = 0x00;icm20608_write( ICM20_LP_MODE_CFG, buff, 1);buff[0] = 0x00;icm20608_write( ICM20_FIFO_EN, buff, 1);
}/*linux driver 驱动接口: 实现对应的open/read/write等函数,填入file_operations结构体
*/
static ssize_t icm20608_drv_read(struct file *file, char __user *buf, size_t size, loff_t *offset)
{int err;signed int data[7];struct icm20608stru_value stru_dev;icm20608_readdata( &stru_dev );data[0] = stru_dev.gyro_x_adc;data[1] = stru_dev.gyro_y_adc;data[2] = stru_dev.gyro_z_adc;data[3] = stru_dev.accel_x_adc;data[4] = stru_dev.accel_y_adc;data[5] = stru_dev.accel_z_adc;data[6] = stru_dev.temp_adc;err = copy_to_user(buf, data, sizeof(data));return err;
}static int icm20608_drv_close(struct inode *node, struct file *file)
{printk(" %s line %d \r\n", __FUNCTION__, __LINE__);return 0;
}static int icm20608_drv_open(struct inode *inode, struct file *filp)
{icm20608_reginit();return 0;
}/* 定义driver的file_operations结构体
*/
static struct file_operations icm20608_fops = {.owner = THIS_MODULE,.read = icm20608_drv_read,.open = icm20608_drv_open,.release = icm20608_drv_close,
};/* 1. 从platform_device获得GPIO* 2. gpio=>irq* 3. request_irq*/
static int icm20608_probe( struct spi_device *spi )
{printk("icm20608 driver and device was matched!\r\n");/* initial spi port */spi->mode = SPI_MODE_0; /*MODE0,CPOL=0,CPHA=0*/spi_setup(spi);icm20608dev.spi = spi;/* register file_operations */icm20608dev.major = register_chrdev( 0, DEVICE_NAME, /* device name */&icm20608_fops); /* create the device class */icm20608dev.class = class_create(THIS_MODULE, "icm20608_class");if (IS_ERR(icm20608dev.class)) {printk("%s line %d\n", __FUNCTION__, __LINE__);unregister_chrdev( icm20608dev.major, DEVICE_NAME);return PTR_ERR( icm20608dev.class );}/* create device */device_create( icm20608dev.class, NULL, MKDEV( icm20608dev.major, 0 ), NULL, DEVICE_NAME); // device name return 0;
}static int icm20608_remove(struct spi_device *spi)
{printk("%s line %d\n", __FUNCTION__, __LINE__);device_destroy( icm20608dev.class, MKDEV( icm20608dev.major, 0));class_destroy(icm20608dev.class);unregister_chrdev(icm20608dev.major, DEVICE_NAME);return 0;
}static const struct of_device_id atk_dl6y2c_icm20608[] = {{ .compatible = "atk,icm20608" },{ },
};static const struct spi_device_id icm20608_id[] = {{ "xxxxyyy", (kernel_ulong_t)NULL },{ /* END OF LIST */ }
};/* 1. 定义platform_driver */
static struct spi_driver icm20608_driver = {.probe = icm20608_probe,.remove = icm20608_remove,.driver = {.name = "atk_icm20608",.of_match_table = atk_dl6y2c_icm20608,},.id_table = icm20608_id,
};/* 2. 入口函数: 注册driver
*/
static int __init icm20608_init(void)
{printk("%s line %d\n",__FUNCTION__, __LINE__);return spi_register_driver(&icm20608_driver);
}/* 3. 出口函数:卸载driver*/
static void __exit icm20608_exit(void)
{printk("%s line %d\n", __FUNCTION__, __LINE__);spi_unregister_driver(&icm20608_driver);
}/*4. 驱动入口和出口函数
*/
module_init(icm20608_init);
module_exit(icm20608_exit);MODULE_LICENSE("GPL");
MODULE_AUTHOR("tangmingfei2013@126.com");
3.2.3.1 驱动代码程序Makefile
PWD := $(shell pwd)KERNEL_DIR=/home/mftang/linux_workspace/study_atk_dl6y2c/kernel/atk-dl6u2c
ARCH=arm
CROSS_COMPILE=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-export ARCH CROSS_COMPILEobj-m:= drv_17_icm20608.oall:$(MAKE) -C $(KERNEL_DIR) M=$(PWD) modulesclean:rm -rf .*.cmd *.o *.mod.c *.ko .tmp_versions *.order *.symvers4 测试驱动安装
4.1 编译驱动程序
在服务器上编译驱动程序,执行make命令后,会生成的.ko,复制该文件到NFS的共享目中,方便在板卡中使用

4.2 在板卡上安装驱动
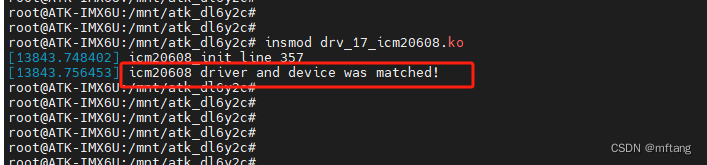
在板卡上执行:
insmod drv_17_icm20608.ko
可以看见打印如下信息,说明驱动程序已经安装到内核
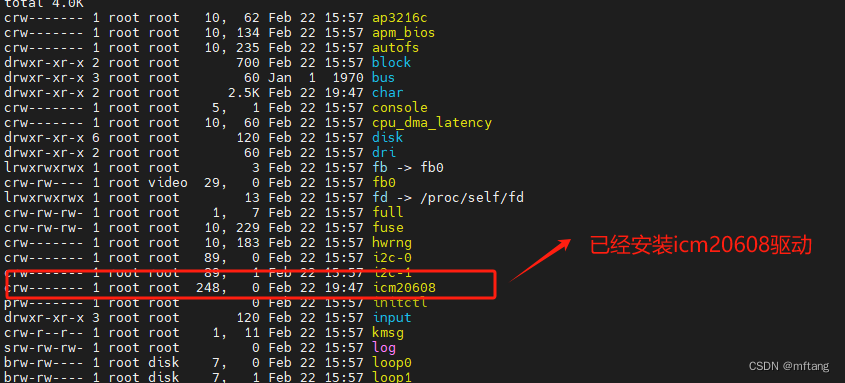
在dev目录下查看该设备驱动:
5 验证和测试
完成驱动程序编写后,并不能保证驱动程序是否能够正常工作,这时需要编程一个测试程序来验证其功能是否可靠。
5.1 编写测试程序
5.1.1 测试程序源代码
/***************************************************************
Copyright 2024-2029. All rights reserved.
文件名 : test_17_icm20608.c
作者 : tangmingfei2013@126.com
版本 : V1.0
描述 : 测试icm20608驱动程序
其他 : 无
日志 : 初版V1.0 2024/02/22
***************************************************************/
#include <sys/types.h>
#include <sys/stat.h>
#include <linux/types.h>
#include <linux/i2c-dev.h>
#include <linux/i2c.h>
#include <sys/ioctl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <fcntl.h>
#include <stdlib.h>
#include <linux/fs.h>
#include <unistd.h>
#include <errno.h>
#include <assert.h>
#include <string.h>
#include <time.h>#define DEV_FILE "/dev/icm20608"struct icm20608stru_value{signed int gyro_x_adc; /* 陀螺仪X轴原始值 */signed int gyro_y_adc; /* 陀螺仪Y轴原始值 */signed int gyro_z_adc; /* 陀螺仪Z轴原始值 */signed int accel_x_adc; /* 加速度计X轴原始值 */signed int accel_y_adc; /* 加速度计Y轴原始值 */signed int accel_z_adc; /* 加速度计Z轴原始值 */signed int temp_adc; /* 温度原始值 */
};int main(void)
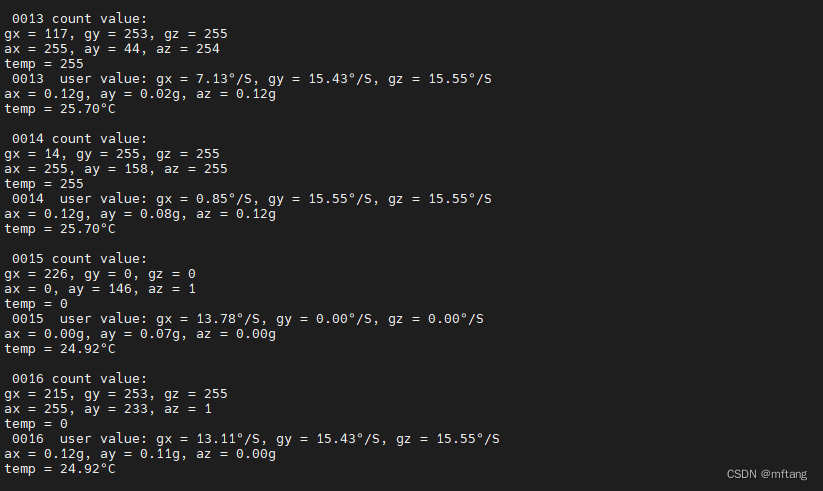
{int count = 0;int fd, ret;unsigned char databuf[7];struct icm20608stru_value stru_value;float gyro_x_act, gyro_y_act, gyro_z_act;float accel_x_act, accel_y_act, accel_z_act;float temp_act;fd = open(DEV_FILE, O_RDWR);if (fd == -1){printf("can not open file: %s \n", DEV_FILE);return -1;}while (count < 10000 ) {ret = read(fd, databuf, sizeof(databuf));if(ret == 0) {stru_value.gyro_x_adc = databuf[0];stru_value.gyro_y_adc = databuf[1];stru_value.gyro_z_adc = databuf[2];stru_value.accel_x_adc = databuf[3];stru_value.accel_y_adc = databuf[4];stru_value.accel_z_adc = databuf[5];stru_value.temp_adc = databuf[6];/* 计算实际值 */gyro_x_act = (float)(stru_value.gyro_x_adc) / 16.4;gyro_y_act = (float)(stru_value.gyro_y_adc) / 16.4;gyro_z_act = (float)(stru_value.gyro_z_adc) / 16.4;accel_x_act = (float)(stru_value.accel_x_adc) / 2048;accel_y_act = (float)(stru_value.accel_y_adc) / 2048;accel_z_act = (float)(stru_value.accel_z_adc) / 2048;temp_act = ((float)(stru_value.temp_adc) - 25 ) / 326.8 + 25;printf("\r\n %04d count value:\r\n", count);printf("gx = %d, gy = %d, gz = %d\r\n", stru_value.gyro_x_adc,stru_value.gyro_y_adc, stru_value.gyro_z_adc);printf("ax = %d, ay = %d, az = %d\r\n", stru_value.accel_x_adc, stru_value.accel_y_adc, stru_value.accel_z_adc);printf("temp = %d\r\n", stru_value.temp_adc);printf(" %04d user value: ", count);printf("gx = %.2f°/S, gy = %.2f°/S, gz = %.2f°/S\r\n", gyro_x_act, gyro_y_act, gyro_z_act);printf("ax = %.2fg, ay = %.2fg, az = %.2fg\r\n", accel_x_act, accel_y_act, accel_z_act);printf("temp = %.2f°C\r\n", temp_act);}usleep(100000); /*100ms */count++;}close(fd);return 0;
}
5.1.2 测试程序Makefile
CFLAGS= -Wall -O2
CC=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-gcc
STRIP=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-striptest_17_icm20608: test_17_icm20608.o$(CC) $(CFLAGS) -o test_17_icm20608 test_17_icm20608.o$(STRIP) -s test_17_icm20608clean:rm -f test_17_icm20608 test_17_icm20608.o5.2 运行测试代码
编译测试代码,将生成的可执行文件共享在NF目录中,方便在板卡中执行程序
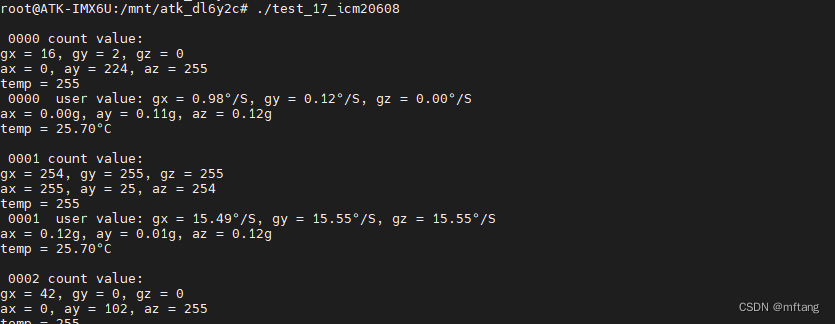
转动板卡,观察sensor的数据变化
5.3 结论
通过运行测试程序,App调用驱动程序,能正确的从sensor中读取数据
相关文章:
实现linux platform tree框架下ICM20608驱动开发(SPI)
目录 概述 1 硬件接口 2 添加ICM20608的设备树信息 2.1 使用i.MX Pins Tool v6配置SPI引脚 2.2 配置设备树 2.3 编译.dts 2.4 在板卡中更新设备树 3 编写驱动程序 3.1 创建设备匹配表 3.2 重要函数介绍 3.2.1 初始化函数 3.2.2 写寄存器函数 3.2.3 读寄存器函数 …...

在前端开发中需要考虑的常见web安全问题和攻击原理以及防范措施
文章目录 一、XSS攻击1、反射型XSS攻击原理2、DOM型XSS攻击原理3、存储型XSS攻击原理 防范措施 二、CSRF攻击攻击原理:防范措施: 三、点击劫持攻击原理:防范措施: 四、项目中如何预防安全问题 随着互联网的发展,Web应用…...

年关将至送大礼 社区适时献爱心
在这个快节奏的时代,社区作为人们生活的重要组成部分,其凝聚力和互助精神显得尤为重要。2024年2月7日,实践队员李若钰有幸参与了社区礼盒分装的活动,这不仅仅是一次简单的劳动,更是一次心灵的洗礼和感悟。 礼盒分装&am…...

singularity容器的技术基础
Singularity容器技术是专为科学计算、数据密集型工作和高性能计算(HPC)环境设计的。与其他容器技术如Docker相比,Singularity提供了一些独特的特性和设计考虑,使其在科学和研究社区中受到欢迎。以下是Singularity容器技术的一些关…...
)
jax可微分编程的笔记(2)
jax可微分编程的笔记(2) 第2章 自动微分 自动微分和符号求导有诸多的相似之处:它们同样依赖于计算图 的构建,同样依赖于求导的递归实现。从某种意义上来说,它们 甚至有完全相同的数据结构。不过,二者的区…...
在Linux服务器上部署一个单机项目
目录 一、jdk安装 二、tomcat安装 三、MySQL安装 四、部署项目 一、jdk安装 1. 上传jdk安装包 jdk-8u151-linux-x64.tar.gz 进入opt目录,将安装包拖进去 2. 解压安装包 这里需要解压到usr/local目录下,在这里我新建一个文件夹保存解压后的文件 [r…...
HTTP概要
文章目录 什么是HTTP?URL的结构请求报文结构请求方法GETHEADPOSTPUTDELETETRACEOPTIONSCONNECTPATCH解释 请求头字段 响应报文结构响应状态响应头字段 HTTP会话3次握手无状态协议 什么是HTTP? HTTP,即Hypertext Transfer Protocol(超文本传输协议) 它是一个”请…...
128 Linux 系统编程6 ,C++程序在linux 上的调试,GDB调试
今天来整理 GDB 调试。 在windows 上我们使用vs2017开发,可以手动的加断点,debug。 那么在linux上怎么加断点,debug呢?这就是今天要整理的GDB调试工具了。 那么有些同学可能会想到:我们在windows上开发,…...
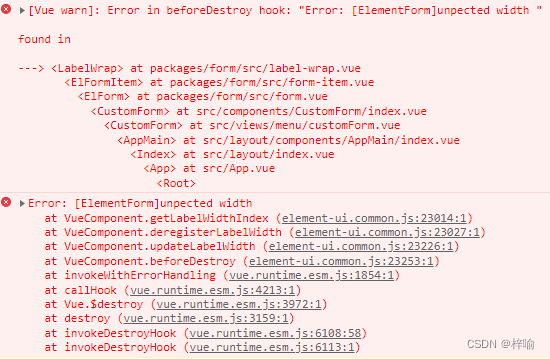
vue2的ElementUI的form表单报错“Error: [ElementForm]unpected width”修复
1. 问题 ElementUI的form表单,当动态切换显示表单时报错 Error: [ElementForm]unpected width。 翻译过来就是form表单的label宽度width出了问题。 2. 分析 参数说明类型可选值默认值label-width表单域标签的宽度,例如 ‘50px’。作为 Form 直接子元…...

Linux 网络命令指南
目录 配置IP地址和子网掩码 网络接口的详细信息 测试与目标主机的连通性 下载文件或内容 远程登录,进行远程管理和协作 CentOS / Red Hat(使用 firewalld) 关闭防火墙 开启防火墙 配置TCP端口(假设使用3306端口ÿ…...

vue3组件间的通信,通过props,emit,provide和inject把数据传递N个层级,expose和ref实现父组件调用子组件方法
文章目录 一、父组件数据传递N个层级的子组件vue3 provide 与 injectA组件名称 app.vueB组件名称 provideB.vueC组件名称 provideCSetup.vue 二、使用v-model指令实现父子组件的双向绑定父组件名称 app.vue子组件名称 v-modelSetup.vue 三、父组件props向子组件传值子组件 prop…...
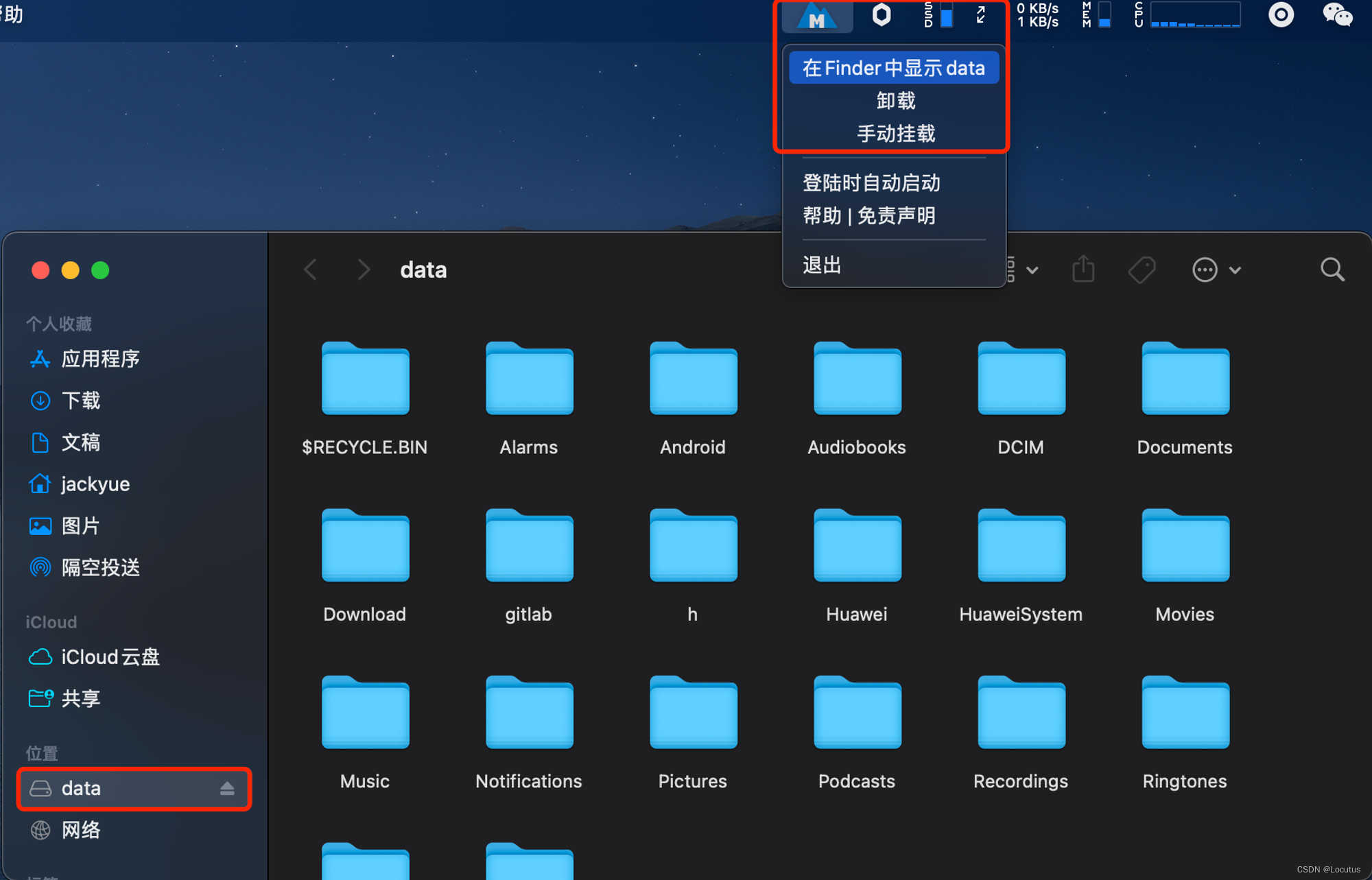
开源免费的NTFS for mac工具mounty
开源免费的NTFS for mac工具mounty 安装依赖 brew install gromgit/fuse/ntfs-3g-macbrew install --cask macfuse安装mounty 如果已经安装macFUSE和ntfs-3g-mac,可以直接点击下载的dmg安装包,安装升级。第一次启动mounty,你需要接受一系列…...

Sora-OpenAI 的 Text-to-Video 模型:制作逼真的 60s 视频片段
OpenAI 推出的人工智能功能曾经只存在于科幻小说中。 2022年,Openai 发布了 ChatGPT,展示了先进的语言模型如何实现自然对话。 随后,DALL-E 问世,它利用文字提示生成令人惊叹的合成图像。 现在,他们又推出了 Text-t…...

4 buuctf解题
[CISCN 2019 初赛]Love Math1 打开题目 题目源码 <?php error_reporting(0); //听说你很喜欢数学,不知道你是否爱它胜过爱flag if(!isset($_GET[c])){show_source(__FILE__); }else{//例子 c20-1$content $_GET[c];if (strlen($content) > 80) {die("…...
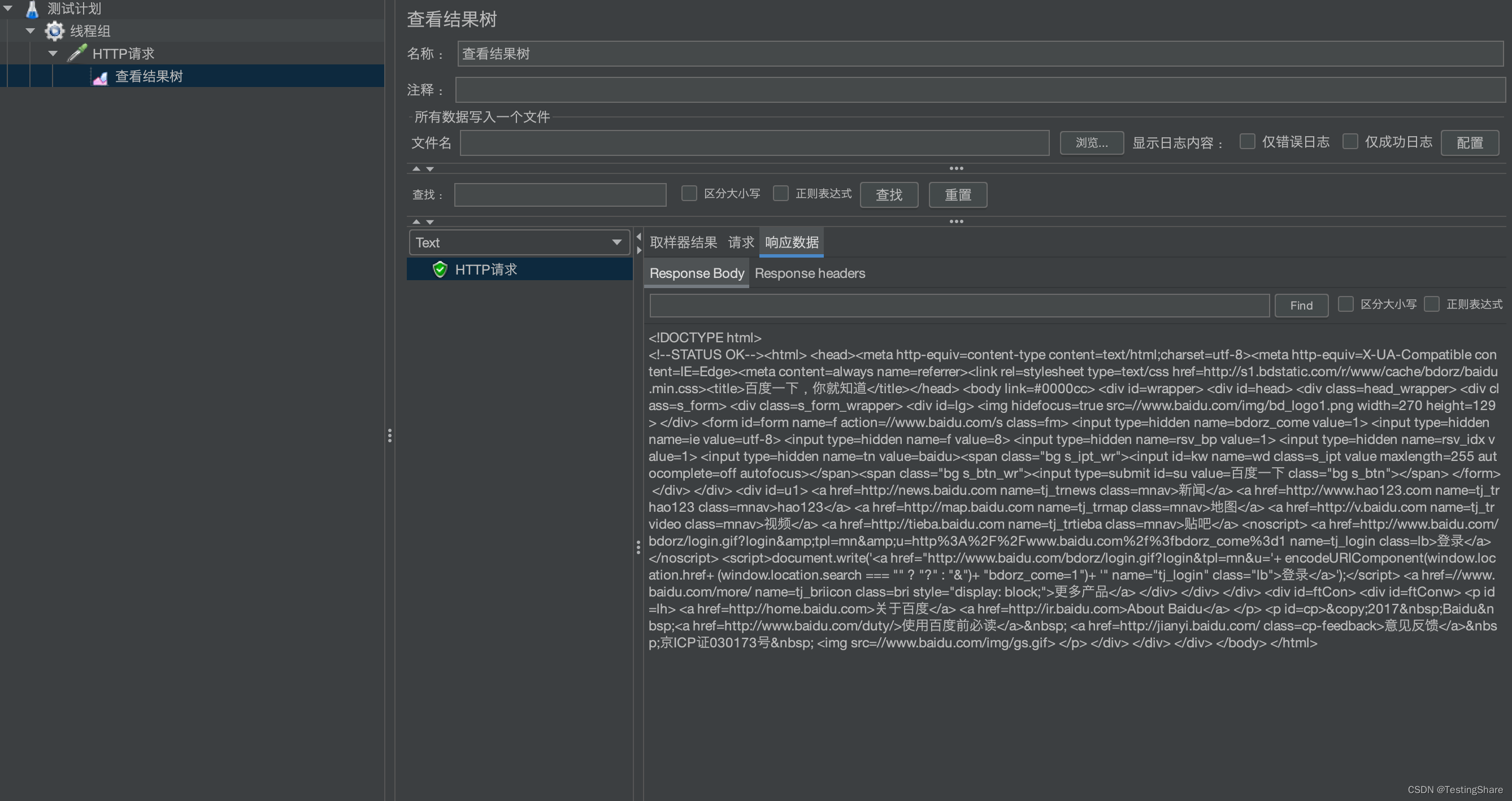
Jmeter基础(3) 发起一次请求
目录 Jmeter 一次请求添加线程组添加HTTP请求添加监听器 Jmeter 一次请求 用Jmeter进行一次请求的过程,需要几个步骤呢? 1、添加线程组2、添加HTTP请求3、添加监听器,查看结果树 现在就打开jmeter看下如何创建一个请求吧 添加线程组 用来…...

视频怎么变成gif动图?一招教你在线转换
MP4是一种常见的视频文件格式,它可以包含音频和视频数据,并支持高质量的视频压缩。MP4视频可以呈现连续的动态效果,可以包含平滑的运动、音频等多媒体元素。而GIF动图是由一系列静态图像组成的,通过快速连续播放这些帧来创造出动态…...
Leetcode2583. 二叉树中的第 K 大层和
Every day a Leetcode 题目来源:2583. 二叉树中的第 K 大层和 解法1:层序遍历 排序 先使用层序遍历计算出树的每一层的节点值的和,保存在数组 levelSum 中。然后将数组进行排序,返回第 k 大的值。需要考虑数组长度小于 k 的边…...
(六)激光线扫描-三维重建
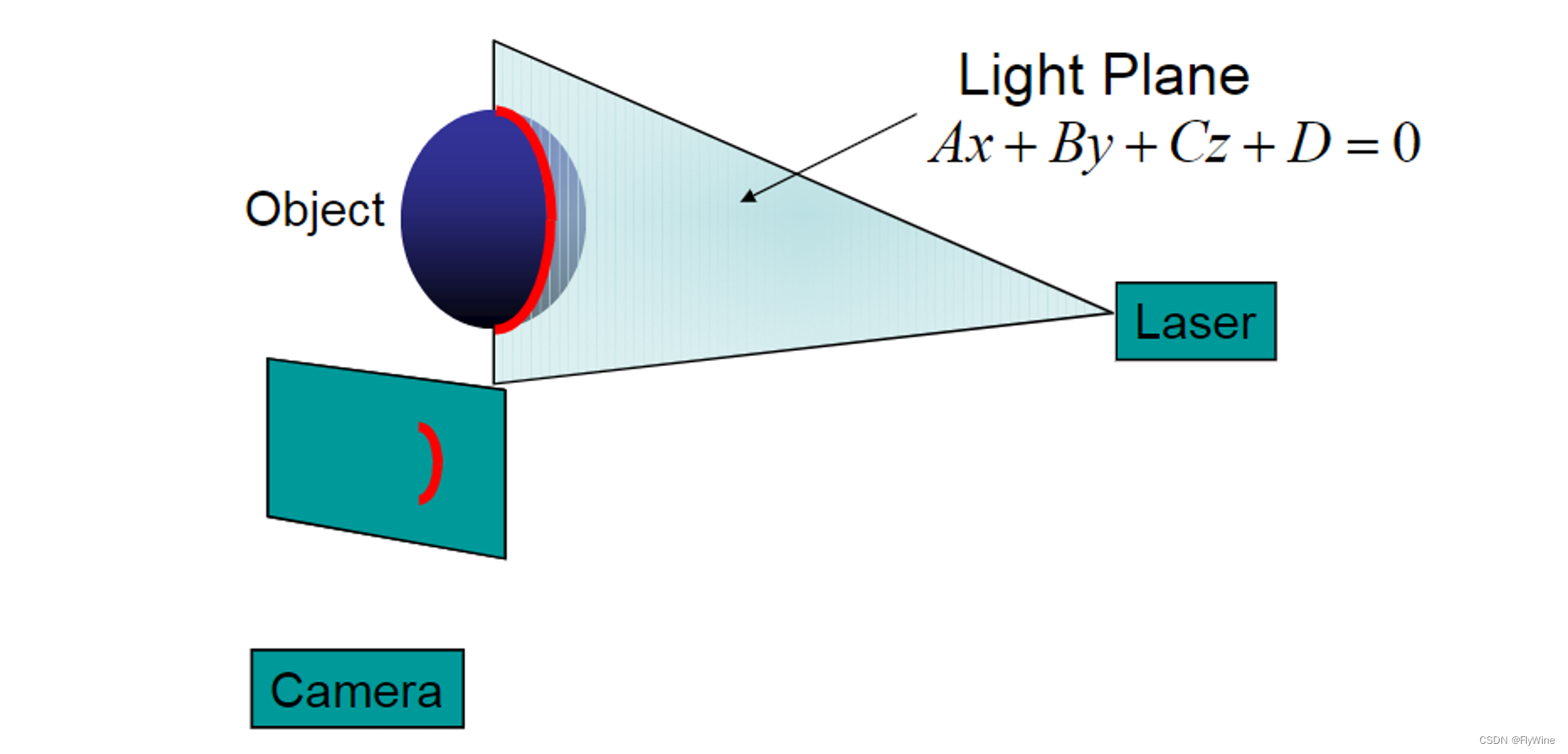
本篇文章是《激光线扫描-三维重建》系列的最后一篇。 1. 基础理论 1.1 光平面 在之前光平面标定的文章中,已经提到过了,是指 激光发射器投射出一条线,形成的一个扇形区域平面就是光平面。 三维空间中平面的公式是: A X + B Y + C Z + D = 0 A X+B Y+C Z+D=0...
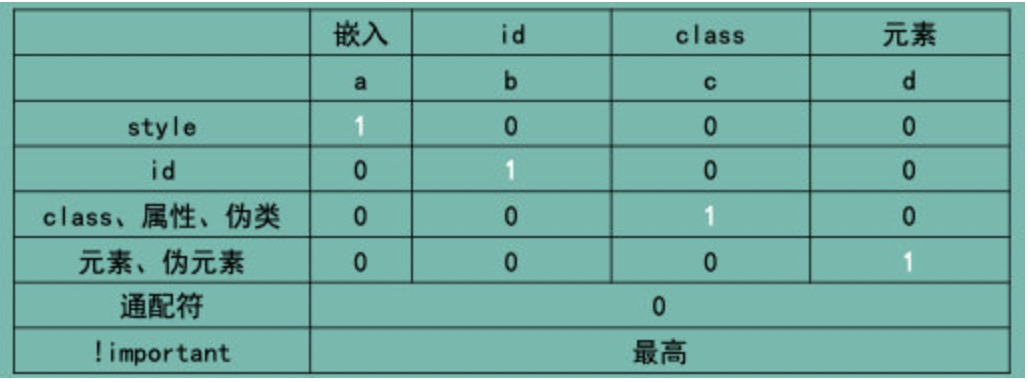
CSS 面试题汇总
CSS 面试题汇总 1. 介绍下 BFC 及其应 参考答案: 参考答案: 所谓 BFC,指的是一个独立的布局环境,BFC 内部的元素布局与外部互不影响。 触发 BFC 的方式有很多,常见的有: 设置浮动overflow 设置为 auto、scr…...
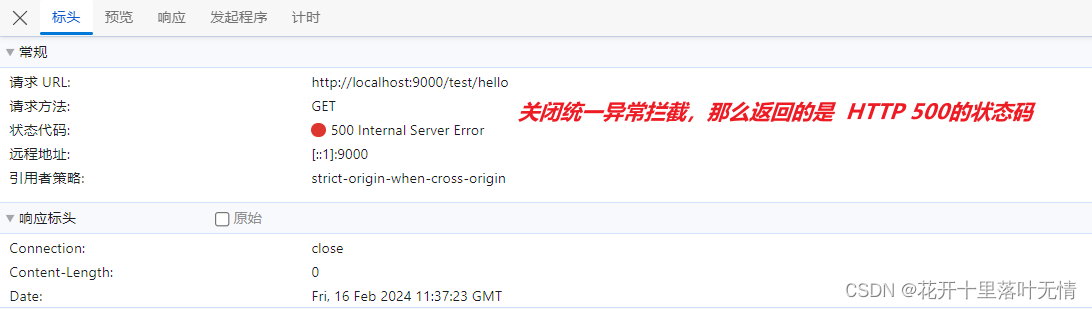
定制你的【Spring Boot Starter】,加速开发效率
摘要: 本文将介绍如何创建一个自定义的 Spring Boot Starter,让您可以封装常用功能和配置,并在多个 Spring Boot 项目中共享和重用。 1. 简介 Spring Boot Starter 是 Spring Boot 框架中的一种特殊的依赖项,它用于快速启动和配置…...
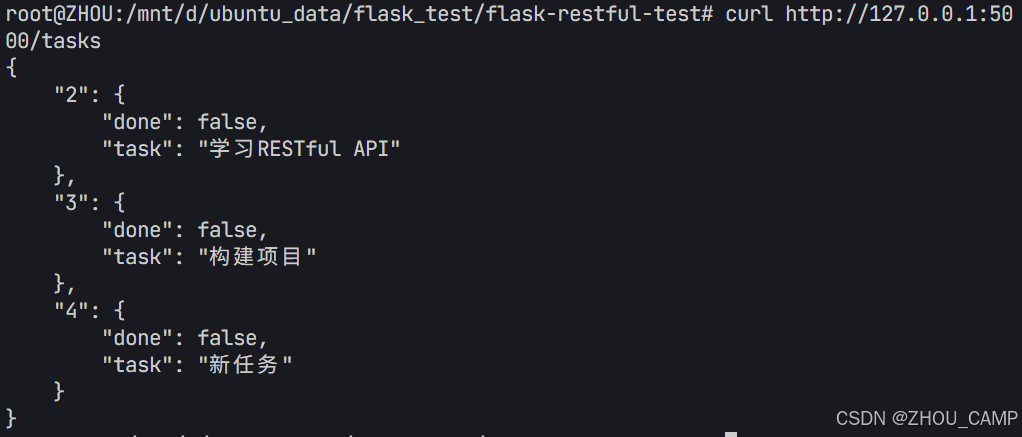
Flask RESTful 示例
目录 1. 环境准备2. 安装依赖3. 修改main.py4. 运行应用5. API使用示例获取所有任务获取单个任务创建新任务更新任务删除任务 中文乱码问题: 下面创建一个简单的Flask RESTful API示例。首先,我们需要创建环境,安装必要的依赖,然后…...

关于nvm与node.js
1 安装nvm 安装过程中手动修改 nvm的安装路径, 以及修改 通过nvm安装node后正在使用的node的存放目录【这句话可能难以理解,但接着往下看你就了然了】 2 修改nvm中settings.txt文件配置 nvm安装成功后,通常在该文件中会出现以下配置&…...

Auto-Coder使用GPT-4o完成:在用TabPFN这个模型构建一个预测未来3天涨跌的分类任务
通过akshare库,获取股票数据,并生成TabPFN这个模型 可以识别、处理的格式,写一个完整的预处理示例,并构建一个预测未来 3 天股价涨跌的分类任务 用TabPFN这个模型构建一个预测未来 3 天股价涨跌的分类任务,进行预测并输…...
剑指offer20_链表中环的入口节点
链表中环的入口节点 给定一个链表,若其中包含环,则输出环的入口节点。 若其中不包含环,则输出null。 数据范围 节点 val 值取值范围 [ 1 , 1000 ] [1,1000] [1,1000]。 节点 val 值各不相同。 链表长度 [ 0 , 500 ] [0,500] [0,500]。 …...

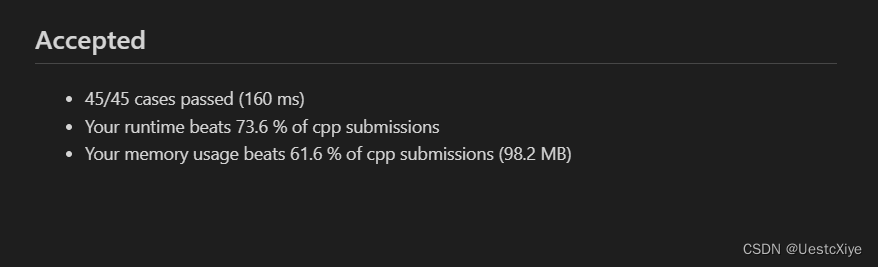
蓝桥杯 冶炼金属
原题目链接 🔧 冶炼金属转换率推测题解 📜 原题描述 小蓝有一个神奇的炉子用于将普通金属 O O O 冶炼成为一种特殊金属 X X X。这个炉子有一个属性叫转换率 V V V,是一个正整数,表示每 V V V 个普通金属 O O O 可以冶炼出 …...
算法岗面试经验分享-大模型篇
文章目录 A 基础语言模型A.1 TransformerA.2 Bert B 大语言模型结构B.1 GPTB.2 LLamaB.3 ChatGLMB.4 Qwen C 大语言模型微调C.1 Fine-tuningC.2 Adapter-tuningC.3 Prefix-tuningC.4 P-tuningC.5 LoRA A 基础语言模型 A.1 Transformer (1)资源 论文&a…...
uniapp手机号一键登录保姆级教程(包含前端和后端)
目录 前置条件创建uniapp项目并关联uniClound云空间开启一键登录模块并开通一键登录服务编写云函数并上传部署获取手机号流程(第一种) 前端直接调用云函数获取手机号(第三种)后台调用云函数获取手机号 错误码常见问题 前置条件 手机安装有sim卡手机开启…...

【JavaSE】多线程基础学习笔记
多线程基础 -线程相关概念 程序(Program) 是为完成特定任务、用某种语言编写的一组指令的集合简单的说:就是我们写的代码 进程 进程是指运行中的程序,比如我们使用QQ,就启动了一个进程,操作系统就会为该进程分配内存…...
【从零开始学习JVM | 第四篇】类加载器和双亲委派机制(高频面试题)
前言: 双亲委派机制对于面试这块来说非常重要,在实际开发中也是经常遇见需要打破双亲委派的需求,今天我们一起来探索一下什么是双亲委派机制,在此之前我们先介绍一下类的加载器。 目录 编辑 前言: 类加载器 1. …...
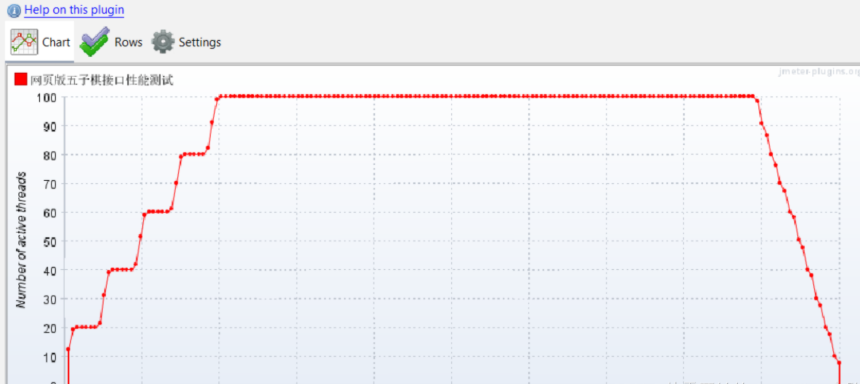
五子棋测试用例
一.项目背景 1.1 项目简介 传统棋类文化的推广 五子棋是一种古老的棋类游戏,有着深厚的文化底蕴。通过将五子棋制作成网页游戏,可以让更多的人了解和接触到这一传统棋类文化。无论是国内还是国外的玩家,都可以通过网页五子棋感受到东方棋类…...