百度Apollo规划算法——轨迹拼接
百度Apollo规划算法——轨迹拼接
- 引言
- 轨迹拼接
- 1、什么是轨迹拼接?
- 2、为什么要进行轨迹拼接?
- 3、结合Apollo代码为例理解轨迹拼接的细节。
- 参考
引言
在apollo的规划算法中,在每一帧规划开始时会调用一个轨迹拼接函数,返回一段拼接轨迹点集,并告诉我们是否重规划以及重规划的原因,那大家是否深入了解并思考过什么是轨迹拼接、为什么要进行轨迹拼接以及是如何进行轨迹拼接的呢?本篇文章便是针对这几个问题,在参考了前辈的一些文章和Apollo代码的基础上进行解答。
轨迹拼接
1、什么是轨迹拼接?
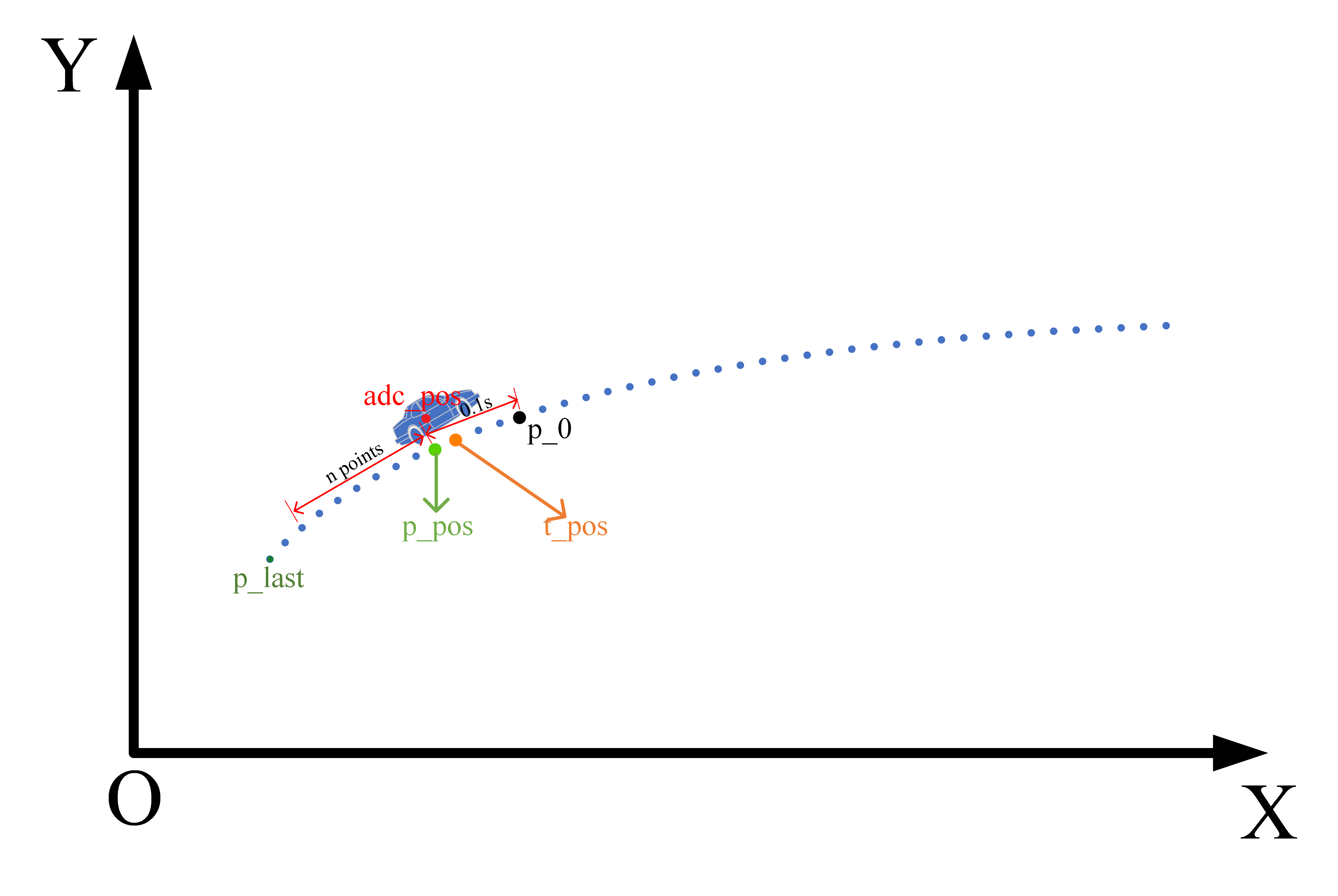
在每一帧轨迹规划的开始,我们需要确定规划的起始点p0=(t,x,y,v,a,heading,kappa)p_0=(t,x,y,v,a,heading,kappa)p0=(t,x,y,v,a,heading,kappa),起始点p0p_0p0给定了规划的初始状态,然后结合当前帧的环境信息并调用规划算法规划生成当前帧轨迹。
那么问题来了,每一帧规划的起始点p0p_0p0是如何确定的呢?在Apollo规划算法中采用了两种方案:
方案1:
根据ADC(Autonomous Driving Car)实际位置状态信息或根据ADC实际位置状态信息,通过车辆运动学推导0.1s后的位置状态信息,作为规划起始点状态,在Apollo中,这一方案叫做重规划(Replan),但是它属于轨迹拼接的一种,只是拼接点集只有一个点p0p_0p0而已。
方案2:
根据当前帧时间戳以及ADC实际位置信息,在上一帧轨迹中寻找匹配点,将上一帧轨迹中匹配点往后0.1s所对应的轨迹点作为当前帧的规划起始状态点,待当前帧规划生成轨迹后,再和上一帧轨迹中所选择的规划起始点前一段距离的轨迹点进行拼接,形成一条完整的车辆运动轨迹,发送给下游控制模块。
严格来说,以上两种方案都属于轨迹拼接,区别是方案1拼接轨迹只有一个点,而方案2的拼接轨迹是上一帧的部分有序点集,但是在Apollo代码中,称第一种方案叫做重新初始化拼接点(也叫重规划)。
2、为什么要进行轨迹拼接?
在了解了什么是轨迹拼接,不知道大家有没有思考过,轨迹拼接的方法为什么有两种,是基于什么原因想法设计的呢?
在轨迹拼接中纳入第二种方法主要考虑的是连续帧之间轨迹的平滑性和连续性,因为轨迹的这两个特性会严重影响到下游控制的效果。理论上,如果控制跟踪和定位完美,不会出现任何误差,则完全可以使用方案1选择规划起始点,但是,由于定位误差和控制误差/滞后的原因,会导致每一规划时刻ADC位置大概率的偏离上一帧所规划的轨迹点,如果此时仍采用方案1,会导致当前帧所规划轨迹和上一帧规划轨迹的不平滑和不连续,从而导致控制的抖动,也可能会引起ADC行驶轨迹发散,跟踪误差越来越大,偏离设定参考线。而方案2可以保证ADC附近一段范围内前后两帧轨迹的平滑性,从而不断引导ADC沿着期望轨迹行驶。
3、结合Apollo代码为例理解轨迹拼接的细节。
结合图1和TrajectoryStitcher::ComputeStitchingTrajectory这个函数,理解哪些情况下选择方案1、哪些情况选择方案2。
选择方案1的情况有:
a.没有使能方案2进行轨迹拼接
b.上一帧不存在轨迹(一般是起步或上一帧规划失败的情况)
c.没有处在自动驾驶模式
d.上一帧存在轨迹但是没有轨迹点
e.当前时间相对于上一帧的相对时间戳小于上一帧起点相对时间戳
f.时间匹配点超出上一帧轨迹点的终点实际范围
g.匹配点处不存在匹配的path_point
h.ADC实际位置和匹配点横纵向偏差超过给定阈值
方案1生成轨迹拼接点主要有两种情况:
情况1——起步阶段:由于起步阶段属于规划算法执行的第一帧,且速度、加速度值很小,可以直接使用当前状态点作为规划的起始状态点;
情况2——非起步阶段:则根据当前ADC状态点结合运动学模型外推TTT时间之后的状态点作为本帧规划起始点。
[xt+1yt+1ψt+1]=[xtytψt]+[cos(ψ)sin(ψ)tan(δf)l]⋅v\begin{bmatrix}x_{t+1}\\y_{t+1}\\\psi_{t+1} \end{bmatrix}= \begin{bmatrix}x_{t}\\y_{t}\\\psi_{t} \end{bmatrix}+\begin{bmatrix}cos(\psi)\\sin(\psi)\\\frac{tan(\delta_f)}{l} \end{bmatrix}\cdot vxt+1yt+1ψt+1=xtytψt+cos(ψ)sin(ψ)ltan(δf)⋅v
这两种情况都属于重新初始化轨迹拼接点。
当以上情况均不满足时,采取方案2进行轨迹拼接,方案2轨迹拼接的具体方法为:
该方案同时考虑了时间匹配和位置匹配:
对于时间匹配:
根据当前时间戳和上一帧轨迹起点的时间戳对比,计算当前时间ADC应该到达的时间匹配点(图1中t_pos)及该匹配点在上一帧轨迹中对应的索引值t_index,若t_pos不存在路径点,则选择方案1。
对于位置匹配:
根据ADC当前位置点在上一帧轨迹中寻找最近的匹配点(图1中p_pos)及该匹配点在上一帧轨迹中对应的索引值p_index,并比较实际位置点和匹配点之间的横纵向位置偏差,若任一偏差超过给定阈值,则选择方案1。
若以上判断均通过,根据 (当前时刻的绝对时间-上一时刻轨迹的初始时间+planning_cycle_time) 得到forward_rel_time,选取时间匹配索引和位置匹配索引中的较小索引作为匹配点索引值matched_index,在上一帧的轨迹上截取出matched_index往前n个点开始,至forward_rel_time的一段轨迹,作为stitching_trajectory。最后,遍历这段轨迹,对其relative_time和s进行赋值。最终,使用stitching_trajectory的最后一个点,即图1中的p_0,作为当前帧轨迹规划的起始点。
选择当前时间+planning_cycle_time的时间对应的上一帧轨迹的位置点作为本帧规划起点的原因是,当本帧规划需要时间planning_cycle_time,将生成轨迹送到规划模块时对应的实际时间理论上就是当前时间+planning_cycle_time。
Apollo轨迹拼接代码
/* Planning from current vehicle state if:
1. the auto-driving mode is off
(or) 2. we don't have the trajectory from last planning cycle
(or) 3. the position deviation from actual and target is too high
*/
std::vector<TrajectoryPoint> TrajectoryStitcher::ComputeStitchingTrajectory(
const VehicleState& vehicle_state, const double current_timestamp,
const double planning_cycle_time, const size_t preserved_points_num,
const bool replan_by_offset, const PublishableTrajectory* prev_trajectory,
std::string* replan_reason) {//a.是否使能轨迹拼接if (!FLAGS_enable_trajectory_stitcher) {*replan_reason = "stitch is disabled by gflag.";return ComputeReinitStitchingTrajectory(planning_cycle_time, vehicle_state);}//b.上一帧是否生成轨迹if (!prev_trajectory) {*replan_reason = "replan for no previous trajectory.";return ComputeReinitStitchingTrajectory(planning_cycle_time, vehicle_state);}//c.是否处于自动驾驶模式if (vehicle_state.driving_mode() != canbus::Chassis::COMPLETE_AUTO_DRIVE) {*replan_reason = "replan for manual mode.";return ComputeReinitStitchingTrajectory(planning_cycle_time, vehicle_state);}//d.上一帧是否存在轨迹点 size_t prev_trajectory_size = prev_trajectory->NumOfPoints();if (prev_trajectory_size == 0) {*replan_reason = "replan for empty previous trajectory.";return ComputeReinitStitchingTrajectory(planning_cycle_time, vehicle_state);}const double veh_rel_time = current_timestamp - prev_trajectory->header_time();size_t time_matched_index = prev_trajectory->QueryLowerBoundPoint(veh_rel_time);//e.判断当前时间相对于上一帧的相对时间戳是否小于上一帧起点相对时间戳if (time_matched_index == 0 &&veh_rel_time < prev_trajectory->StartPoint().relative_time()) {*replan_reason ="replan for current time smaller than the previous trajectory's first ""time.";return ComputeReinitStitchingTrajectory(planning_cycle_time, vehicle_state);}//f.判断时间匹配点是否超出上一帧轨迹点范围if (time_matched_index + 1 >= prev_trajectory_size) {*replan_reason ="replan for current time beyond the previous trajectory's last time";return ComputeReinitStitchingTrajectory(planning_cycle_time, vehicle_state);}auto time_matched_point = prev_trajectory->TrajectoryPointAt(static_cast<uint32_t>(time_matched_index));//g.判断时间匹配点处是否存在path_pointif (!time_matched_point.has_path_point()) {*replan_reason = "replan for previous trajectory missed path point";return ComputeReinitStitchingTrajectory(planning_cycle_time, vehicle_state);}size_t position_matched_index = prev_trajectory->QueryNearestPointWithBuffer({vehicle_state.x(), vehicle_state.y()}, 1.0e-6);//计算实际位置点和匹配点的横纵向偏差auto frenet_sd = ComputePositionProjection(vehicle_state.x(), vehicle_state.y(),prev_trajectory->TrajectoryPointAt(static_cast<uint32_t>(position_matched_index)));//h.判断横纵向偏差if (replan_by_offset) {auto lon_diff = time_matched_point.path_point().s() - frenet_sd.first;auto lat_diff = frenet_sd.second;//h.1:横向偏差不满足条件if (std::fabs(lat_diff) > FLAGS_replan_lateral_distance_threshold) {const std::string msg = absl::StrCat("the distance between matched point and actual position is too ""large. Replan is triggered. lat_diff = ",lat_diff);*replan_reason = msg;return ComputeReinitStitchingTrajectory(planning_cycle_time,vehicle_state);}//h.2:纵向偏差不满足条件if (std::fabs(lon_diff) > FLAGS_replan_longitudinal_distance_threshold) {const std::string msg = absl::StrCat("the distance between matched point and actual position is too ""large. Replan is triggered. lon_diff = ",lon_diff);*replan_reason = msg;return ComputeReinitStitchingTrajectory(planning_cycle_time,vehicle_state);}} else {ADEBUG << "replan according to certain amount of lat and lon offset is ""disabled";}//计算当前时刻后T时刻的时间,并计算其在上一帧轨迹中对应的索引值double forward_rel_time = veh_rel_time + planning_cycle_time;size_t forward_time_index =prev_trajectory->QueryLowerBoundPoint(forward_rel_time);ADEBUG << "Position matched index:\t" << position_matched_index;ADEBUG << "Time matched index:\t" << time_matched_index;//选择时间匹配索引和位置匹配索引中的较小索引作为匹配点索引auto matched_index = std::min(time_matched_index, position_matched_index);//构建拼接轨迹,<匹配索引点前n个点,当前时刻后的T时刻所对应的匹配点>std::vector<TrajectoryPoint> stitching_trajectory(prev_trajectory->begin() +std::max(0, static_cast<int>(matched_index - preserved_points_num)),prev_trajectory->begin() + forward_time_index + 1);const double zero_s = stitching_trajectory.back().path_point().s();for (auto& tp : stitching_trajectory) {if (!tp.has_path_point()) {*replan_reason = "replan for previous trajectory missed path point";return ComputeReinitStitchingTrajectory(planning_cycle_time,vehicle_state);}//适配时间和s值tp.set_relative_time(tp.relative_time() + prev_trajectory->header_time() -current_timestamp);tp.mutable_path_point()->set_s(tp.path_point().s() - zero_s);}return stitching_trajectory;
}
参考
【1】Apollo 6.0 轨迹拼接算法解析
【2】规划控制之轨迹拼接
【3】第二章第三节(中) 控制接口,轨迹拼接
【4】轨迹拼接(Trajectory Stitching)
【5】Apollo轨迹拼接模块(Trajectory Stitching)研读
【6】Apollo6.0
相关文章:
百度Apollo规划算法——轨迹拼接
百度Apollo规划算法——轨迹拼接引言轨迹拼接1、什么是轨迹拼接?2、为什么要进行轨迹拼接?3、结合Apollo代码为例理解轨迹拼接的细节。参考引言 在apollo的规划算法中,在每一帧规划开始时会调用一个轨迹拼接函数,返回一段拼接轨迹…...
6. unity之脚本
1. 说明 当整个游戏运行起来之后,我们无法再借助鼠标来控制物体,此时可以使用脚本来更改物体的各种姿态,驱动游戏的整体运动逻辑。 2. 脚本添加 首先在Assets目录中,新创建一个Scripts文件夹,在该文件内右键鼠标选择…...
解析)
flink-note笔记:flink-state模块中broadcast state(广播状态)解析
github开源项目flink-note的笔记。本博客的实现代码都写在项目的flink-state/src/main/java/state/operator/BroadcastStateDemo.java文件中。 项目github地址: github 1. 广播状态是什么 网上关于flink广播变量、广播状态的讲解很杂。我翻了flink官网发现,实际上在1.15里面…...

vue——预览PDF
下载插件 npm install --save vue-pdf创建组件 <template><div class"ins-submit-docs-content ins-submit-docs-pdf"><div v-if"loading" style"position: absolute; top: 40%; width: 100%;text-align: center;"><el-l…...
数据库复习
什么是数据库系统 数据库系统是指在计算机系统中引入数据库后构成的系统,一般由数据库、数据库管理系统(及其开发工具)、应用系统、数据库管理员和用户构成 数据库系统的特点是什么? 数据结构化数据的共享性高,冗余度低且易扩充数据独立性高数…...
vscode插件推荐
文章目录前言一、vscode插件推荐?1、 Chinese (Simplified) (简体中文) Language Pack for Visual Studio Code2、Auto Close Tag3、Auto Import3、Error Lens4、vscode-icons5、ES7 React/Redux/React-Native snippets6、GitLens — Git supercharged7、JavaScript…...

THUPC2023初赛总结
今天参加了THUPC2023初赛,感觉还行。 比赛本来是11:00-16:00,但出了点问题,比赛延迟了十分钟。 刚开始,我从第一题往后看,寻找简单的题。 过了一会儿,一看排行榜,怎么最后一题全是绿的&#…...
unity知识点小结02
虚拟轴 虚拟轴就是一个数值在-11内的轴,这个数轴上重要的数值就是-1,0和1。当使用按键模拟一个完整的虚拟轴时需要用到两个按键,即将按键1设置为负轴按键,按键2设置为正轴按键。在没有按下任何按键的时候,虚拟轴的数值为0…...

总线(四)Modbus总线 协议
文章目录Modbus技术背景Modbus OSI分布Moudbus分类通讯过程Moudbus协议通信过程以及报文解析RTU 与 ASCII 收发数据区别Modbus技术背景 Modbus是一种串行通信协议。 1971年,Modicon公司首次退出Modbus协议,ModbusRTU和Modbus ASCII诞生于此。 后来施耐德…...

Cadence Allegro 导出Component Report详解
⏪《上一篇》 🏡《总目录》 ⏩《下一篇》 目录 1,概述2,Component Report作用3,Component Report示例4,Component Report导出方法4.1,方法14,2,方法2B站关注“硬小二”浏览更多演示视频 1,...

程序猿成长之路之密码学篇-DES算法详解
DES的算法实现原理详情请见 https://blog.csdn.net/qq_31236027/article/details/128209185 DES算法密钥获取详情请见 https://blog.csdn.net/qq_31236027/article/details/129224730 编码工具类获取详见 https://blog.csdn.net/qq_31236027/article/details/128579451 DES算法…...
maven生命周期、阶段与默认绑定插件梳理
maven生命周期、阶段与默认绑定插件梳理 CSDN博客 码云源码 1.maven生命周期、阶段与默认绑定插件 序号生命周期lifecycle阶段phase默认绑定插件(链接官网)默认绑定插件(链接maven库)说明1cleancleanmaven-clean-pluginmaven-clean-plugin清理2.1buildvalidate——验证2.2b…...

【数学基础】
文章目录『 第1讲 高等数学预备知识 』1.1 函数的概念与特性函数的四种特性【 重要结论 】1.2 函数的图像直角坐标系下的图像极坐标系下的图像参数方程1.3 常用基础知识【 情报#1 】『 第2讲 数列极限 』2.1 引言2.2 求数列极限【 情报#2 】『 第1讲 高等数学预备知识 』 1.1 …...

网上电子商城的设计与实现
技术:Java、JSP等摘要:21 世纪以来,人类经济高速发展,人们的生活发生了日新月异的变化,特别是计算机的应用及普及到经济和社会生活的各个领域。在消费领域,网上购物已经成为大众所接受的一种新型的消费方式…...

2023thupc总结
A 大富翁 很有意思的题 ∑x∈A∑y∈B[x支配y]−∑x∈A∑y∈B[y支配x]−∑x∈Awx\sum_{x\in A}\sum_{y\in B}[x支配y]-\sum_{x\in A}\sum_{y\in B}[y支配x]-\sum_{x\in A}w_x∑x∈A∑y∈B[x支配y]−∑x∈A∑y∈B[y支配x]−∑x∈Awx ∑x∈A∑y[x支配y]−∑x∈A∑y[y支…...
【数据库】MySQL数据库基础
目录 1.数据库: 2.数据库基本操作 2.1 MySQL的运行原理 2.2显示数据库: 2.3创建数据库 2.4使用数据库 2.5删除数据库 3.常见的数据类型 3.1数值类型: 3.2字符型类型 3.3日期类型 4.表的操作 4.1创建表 4.2查看表 4.3删除表 5.汇总…...
grid了解
结构 <div class"grid"><div>1</div><div>2</div><div>3</div><div>4</div><div>5</div><div>6</div><div>7</div><div>8</div><div>9</div>&l…...

2023年全国最新工会考试精选真题及答案13
百分百题库提供工会考试试题、工会考试预测题、工会考试真题、工会证考试题库等,提供在线做题刷题,在线模拟考试,助你考试轻松过关。 81.女职工委员会在()下开展工作。 A.企业工会委员会领导 B.企业工会委员会指导 …...
初识HTML技术
文章目录一、为什么学习前端?二、第一个HTML文件VSCode三. HTML元素四. HTML页面一、为什么学习前端? 我们作为一个后端程序员,为什么还要学习前端,因为我们的终极目的是实现web开发,搭建网站,网站 前端 后端 比如我们随便…...

我们为什么要用消息队列?
消息队列是系统设计中存在时间最长的中间件之一,从系统有通信需求开始,就产生了消息队列。 消息队列的使用场景 在日常系统设计与实现的过程中,下面3种场景会涉及到消息队列: 异步处理流量控制服务解耦 异步处理 典型的应用场…...

生成xcframework
打包 XCFramework 的方法 XCFramework 是苹果推出的一种多平台二进制分发格式,可以包含多个架构和平台的代码。打包 XCFramework 通常用于分发库或框架。 使用 Xcode 命令行工具打包 通过 xcodebuild 命令可以打包 XCFramework。确保项目已经配置好需要支持的平台…...

边缘计算医疗风险自查APP开发方案
核心目标:在便携设备(智能手表/家用检测仪)部署轻量化疾病预测模型,实现低延迟、隐私安全的实时健康风险评估。 一、技术架构设计 #mermaid-svg-iuNaeeLK2YoFKfao {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg…...
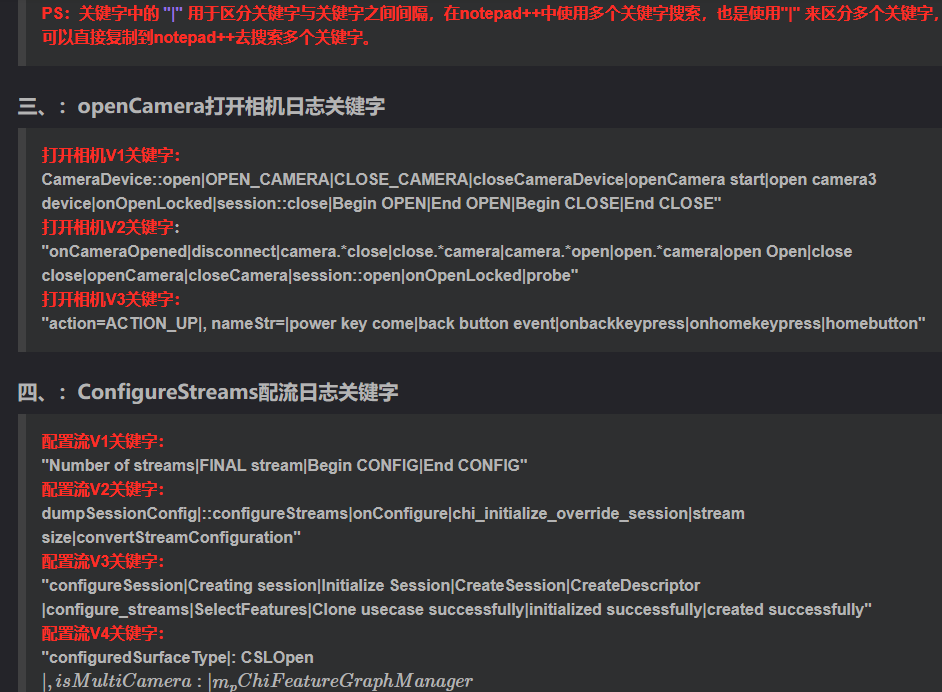
相机Camera日志实例分析之二:相机Camx【专业模式开启直方图拍照】单帧流程日志详解
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了: 这一篇我们开始讲: 目录 一、场景操作步骤 二、日志基础关键字分级如下 三、场景日志如下: 一、场景操作步骤 操作步…...
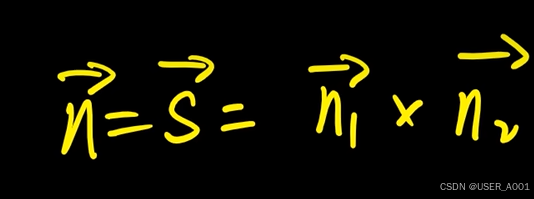
高等数学(下)题型笔记(八)空间解析几何与向量代数
目录 0 前言 1 向量的点乘 1.1 基本公式 1.2 例题 2 向量的叉乘 2.1 基础知识 2.2 例题 3 空间平面方程 3.1 基础知识 3.2 例题 4 空间直线方程 4.1 基础知识 4.2 例题 5 旋转曲面及其方程 5.1 基础知识 5.2 例题 6 空间曲面的法线与切平面 6.1 基础知识 6.2…...

MODBUS TCP转CANopen 技术赋能高效协同作业
在现代工业自动化领域,MODBUS TCP和CANopen两种通讯协议因其稳定性和高效性被广泛应用于各种设备和系统中。而随着科技的不断进步,这两种通讯协议也正在被逐步融合,形成了一种新型的通讯方式——开疆智能MODBUS TCP转CANopen网关KJ-TCPC-CANP…...

WordPress插件:AI多语言写作与智能配图、免费AI模型、SEO文章生成
厌倦手动写WordPress文章?AI自动生成,效率提升10倍! 支持多语言、自动配图、定时发布,让内容创作更轻松! AI内容生成 → 不想每天写文章?AI一键生成高质量内容!多语言支持 → 跨境电商必备&am…...
)
相机Camera日志分析之三十一:高通Camx HAL十种流程基础分析关键字汇总(后续持续更新中)
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了:有对最普通的场景进行各个日志注释讲解,但相机场景太多,日志差异也巨大。后面将展示各种场景下的日志。 通过notepad++打开场景下的日志,通过下列分类关键字搜索,即可清晰的分析不同场景的相机运行流程差异…...

使用 Streamlit 构建支持主流大模型与 Ollama 的轻量级统一平台
🎯 使用 Streamlit 构建支持主流大模型与 Ollama 的轻量级统一平台 📌 项目背景 随着大语言模型(LLM)的广泛应用,开发者常面临多个挑战: 各大模型(OpenAI、Claude、Gemini、Ollama)接口风格不统一;缺乏一个统一平台进行模型调用与测试;本地模型 Ollama 的集成与前…...
详细解析)
Caliper 负载(Workload)详细解析
Caliper 负载(Workload)详细解析 负载(Workload)是 Caliper 性能测试的核心部分,它定义了测试期间要执行的具体合约调用行为和交易模式。下面我将全面深入地讲解负载的各个方面。 一、负载模块基本结构 一个典型的负载模块(如 workload.js)包含以下基本结构: use strict;/…...
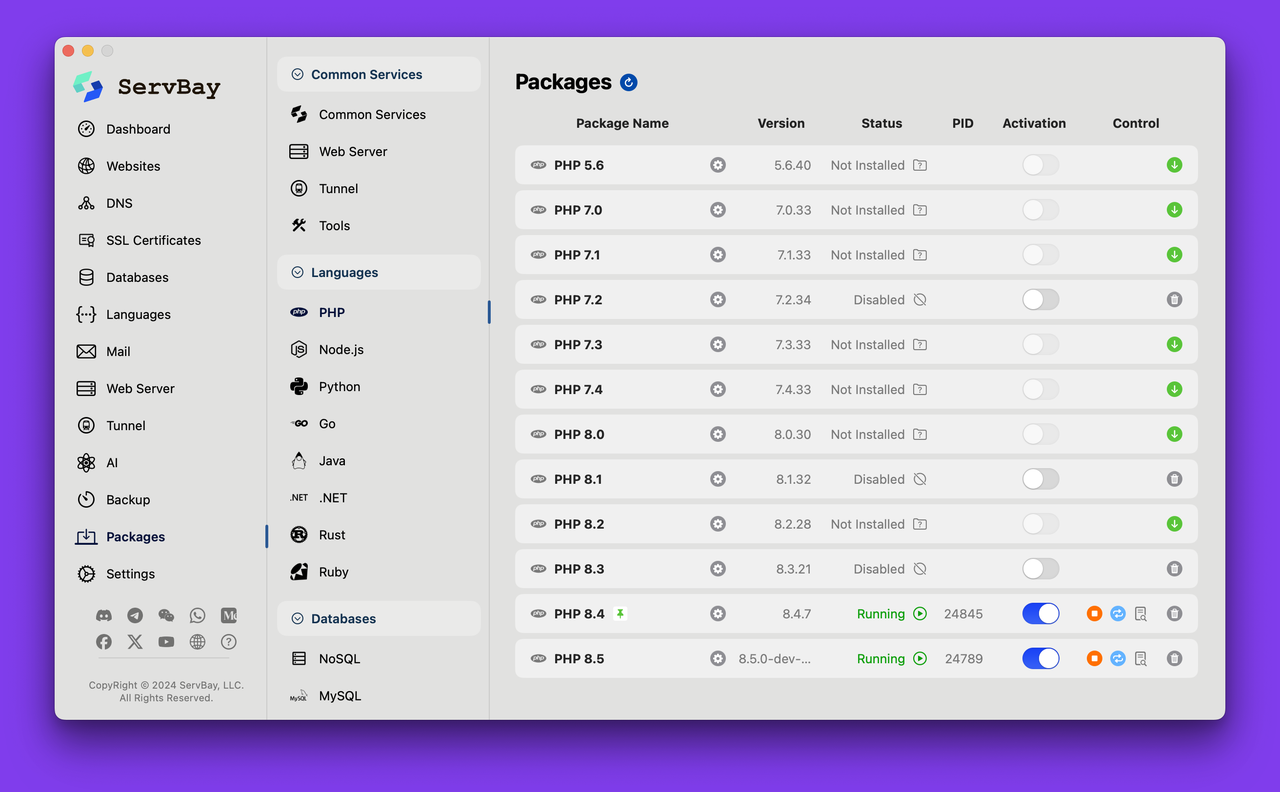
PHP 8.5 即将发布:管道操作符、强力调试
前不久,PHP宣布了即将在 2025 年 11 月 20 日 正式发布的 PHP 8.5!作为 PHP 语言的又一次重要迭代,PHP 8.5 承诺带来一系列旨在提升代码可读性、健壮性以及开发者效率的改进。而更令人兴奋的是,借助强大的本地开发环境 ServBay&am…...