2022年MathorCup数学建模B题无人仓的搬运机器人调度问题解题全过程文档加程序
2022年第十二届MathorCup高校数学建模
B题 无人仓的搬运机器人调度问题
原题再现
本题考虑在无人仓内的仓库管理问题之一,搬运机器人 AGV 的调度问题。更多的背景介绍请参看附件-背景介绍。对于无人仓来说,仓库的地图模型可以简化为图的数据结构。
仓库地图:
无人仓内的设施,可以细分为 AGV 能行驶的道路节点,和别的功能节点(如工位,储位等)。这样,仓库地图模型可以抽象为这些节点构成的图,再按 AGV 能到达的节点来添加图的边。简单来说,附件仓库地图数据(map.csv)通过描述节点类型,以及节点之间的关系(边),可以构建如下图 1 所示的仓库地图。
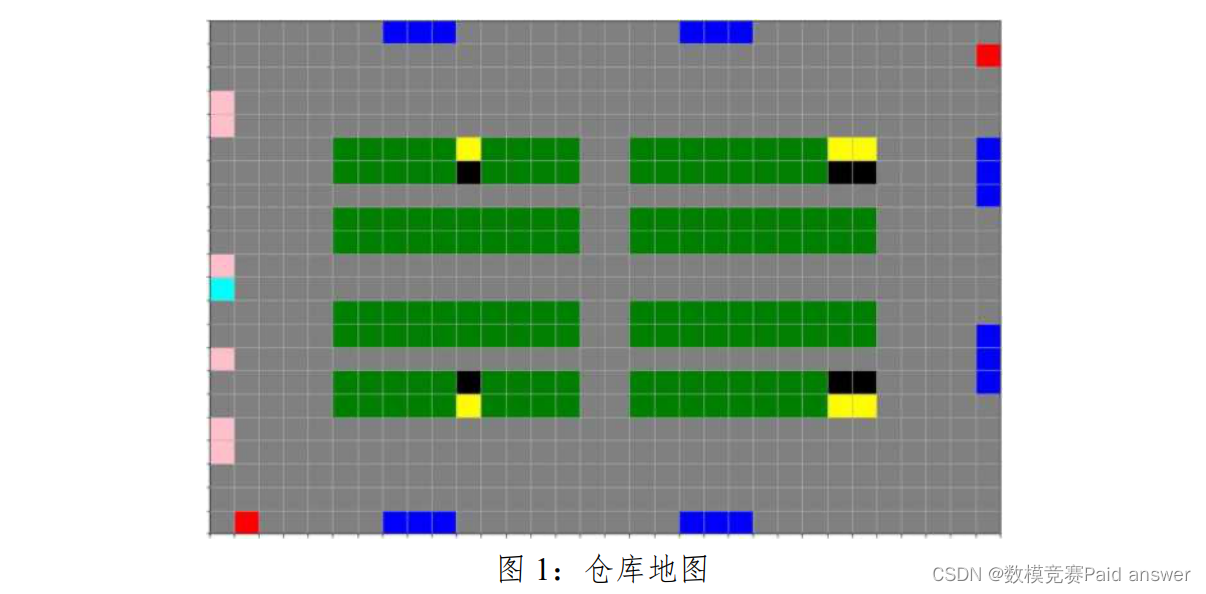
仓库地图数据(map.csv)是按 csv 格式存储,其节点类型有如下几类,在上图中用不同颜色标注。
1) 路径节点(灰色):AGV 可以自由通行。
2) 储位节点(绿色):放置托盘或者普通货架,AGV 可以到达。一般只有一个位置可以进出,即靠近道路的位置。
3) 保留节点(黄色):保留位置。
4) 柱子节点(黑色):障碍物,AGV 不能到达。
5) 拣选工位节点(蓝色):拣选机器人在这里把商品打包后从传送带出库,一般有多个托盘停靠位。
6) 补货位节点(粉色):从高密度区补货的商品放置点,一般通过传送带输送。
7) 空托盘回收节点(红色):空托盘回收处,图中只有两处。
无人仓任务场景:
假设仓库地图按上述方式抽象成图,搬运机器人 AGV—次只搬运一个托盘(带有多种商品),能执行从一个地图节点na移动到nb的路径指令,其中每一步只能移动到有边相连的地图节点,不能斜着移动。附件中机器人数据(agv.csv)里,给出了 20 个搬运机器人 AGV 在仓库地图上的初始位置坐标。
假设仓库内商品都是中大件商品,每个在储位的托盘上叠放着多种商品,附件中的库存数据(pallets.csv)给岀了全部托盘的位置以及托盘上放的商品信息。对于中件仓来说,即使用户订单包含了多个商品,实际发货还是一个商品一个包裹。这样,AGV 执行任务只需要尽快满足商品数目的要求,不需要等待同一订单中的全部商品到齐后才能出库。所以附件订单数据(orders.csv)里,每个订单只有同一件商品以及对应的数量。
无人仓流程是根据给定的一段时间内订单数据流,结合当前库存情况,统筹安排搬运机器人从储位搬运有需求商品的托盘到附近的拣选工位(即出库任务),拣选完成后需安排搬运工位处的非空托盘到空储位(即回库任务),或者安排搬运工位处的空托盘到托盘回收处(即回收任务)等。本题只考虑这三种主要任务场景,即出库、回库、回收任务。
首先,对于出库任务,搬运机器人 AGV 把一个托盘搬运到拣选工位。但是对于同一个工位来说,同时能容纳放置的托盘数目是有限的。假设每个拣选工位有 b 个停靠位,也就是能同时最多分派 b 个出库任务到同一个拣选工位,直到执行回库或者回收任务,有空停靠位后才能容纳新的出库托盘。
其次,出库任务完成后,搬运机器人处于空闲状态,可以被安排执行下一个任务,而不需要在停靠位等候着。不妨假设出库托盘在拣选工位需要停留一段时间后,等拣选机器人打包发货后才能进行后续的回库或者回收任务。这里假设停留时间固定为t0,也就是说,无论需要拣选多少商品,都简化为停留时间t0后,该托盘可以被执行后续的回库和回收任务。
无人仓总结:
无人仓的主要运行场景就是安排搬运机器人 AGV 执行如下各种任务。
•出库:AGV 搬运载有商品的托盘到空闲拣选工位
•回库:AGV 搬运拣选完成的托盘从工位回到仓库内空储位
•回收:AGV 搬运拣选完成的空托盘从工位到托盘回收处
无人仓的核心是统筹优化上述任务的执行来最大化出库效率,安排AGV 任务和路线需满足全局最优,达到实时响应,并避免拥堵/死锁等情况发生。也需要均衡拣选工位之间的工作量。
问题 1:AGV 统筹调度的最佳策略
假设先不考虑搬运机器人在执行任务时可能的碰撞问题,请在无人仓模型下设计调度算法,根据附件中订单数据(orders.csv),和仓库内的库存数据(pallets.csv),对于给定的 20 个搬运机器人(agv.csv),统筹调度和安排 AGV 任务,直到满足所有的订单需求,即全部拣选工位都空闲为止。这里,目标函数为在每个搬运机器人尽可能忙的同时,最小化全部搬运机器人的行走总路径。
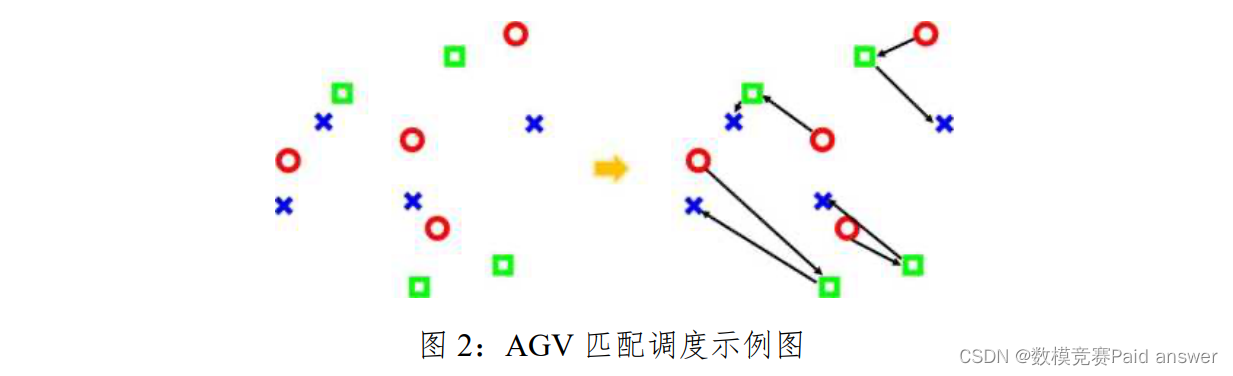
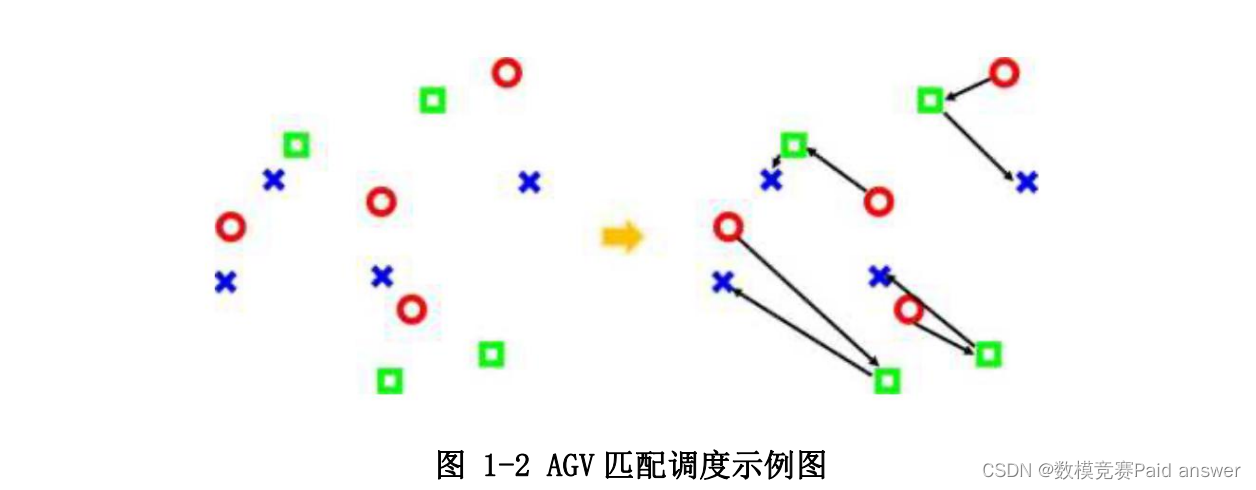
下面左图中,用红色圆圈表示 AGV,用绿色方块表示货架或者托盘,用蓝色 X 表示拣选工位。右图中匹配了最近的 AGV、托盘和工位,使得指定AGV 去取托盘后再送到工位拣选。
注意,现实场景中的目标其实是全局优化出库效率,节省人力,避免高峰期出现"爆仓”现象。所以更合适的衡量指标是时间上的,要求在最短的时间内满足订单需求。在某种程度上,目标可以转化为使得每个拣选工位尽可能忙,即最小化最忙拣选工位的工作时长。另一方面,仓库内搬运机器人 AGV 的合理投放数量一般是拣选工位的常数倍,因为投放太多的话出库效率不但不会改善,反而增加 AGV 拥堵的可能性。进一步考虑到每个工位可以增加停靠位,而且搬运机器人除了出库任务,还有回库和回收等任务。所以使得每个 AGV 尽可能忙,然后最小化全部 AGV 行走总路径,也是合理的模型目标简化。
问题 2:任务均衡区域划分
为了更好地平衡拣选工位的负载,同时预防搬运机器人的局部拥堵,根据拣选工位和库存商品数量对仓库地图进行动态分区。也就是对仓库内储位上的每个托盘,都指定一个默认拣选工位。
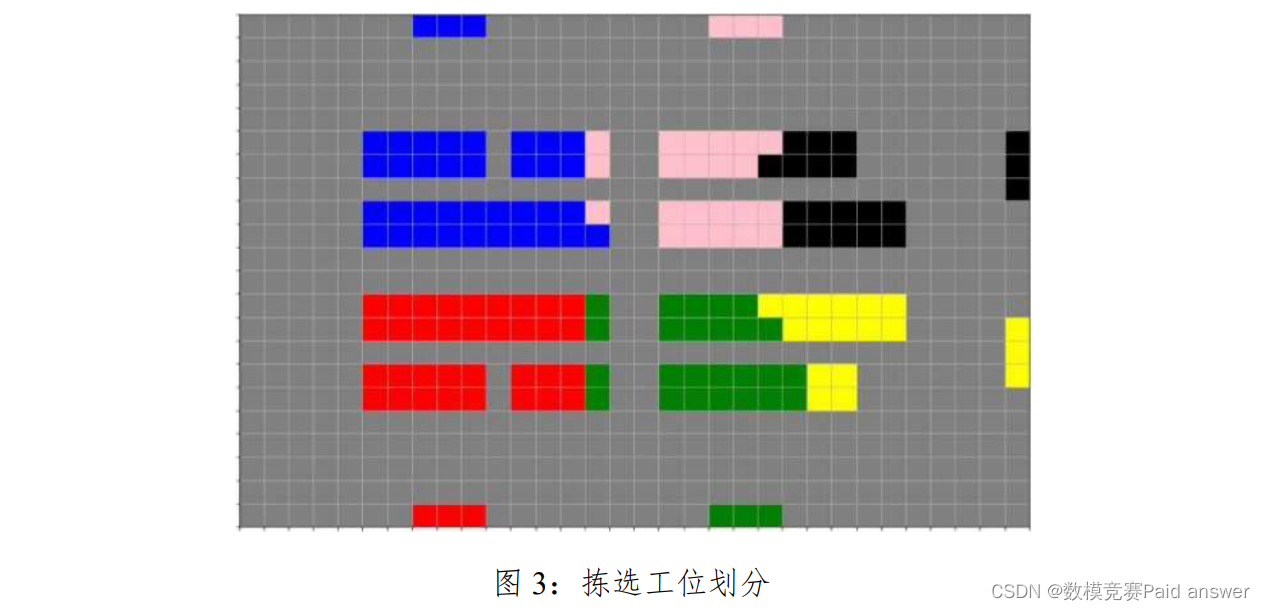
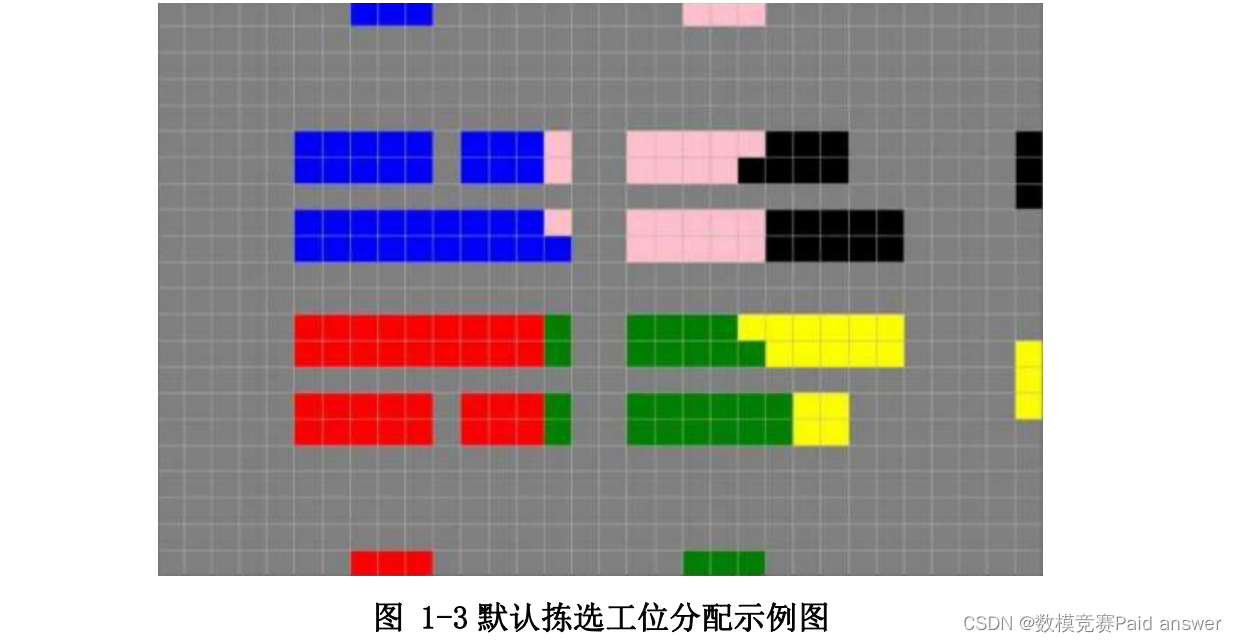
请建立优化模型,使得每个拣选工位对应托盘的商品总量尽可能地平均,同时要求最小化全部托盘到其默认拣选工位距离总和。类似下图 3 所示的区域划分。
进一步,根据某段时间内所需出库商品的库存分布,再结合问题一的AGV 调度算法,更合理地均衡每个拣选工位在某段时间内的工作量。
问题 3:避免碰撞和拥堵
在问题一和问题二的基础上,进一步考虑搬运机器人的碰撞和拥堵问题。当仓库内同时有多个 AGV 在执行任务时,不可避免有些 AGV 在某个路径节点上相遇。特别地,如果两个 AGV 在一条货架窄巷道上相遇,那么需要其中一个 AGV 避让。
在合理的假设下,请设计算法和防碰撞策略,使得搬运机器人能智能地避免碰撞。特别是在一些特殊节点处(如托盘回收处),避免出现多个AGV 的拥堵,和可能的死锁场景。
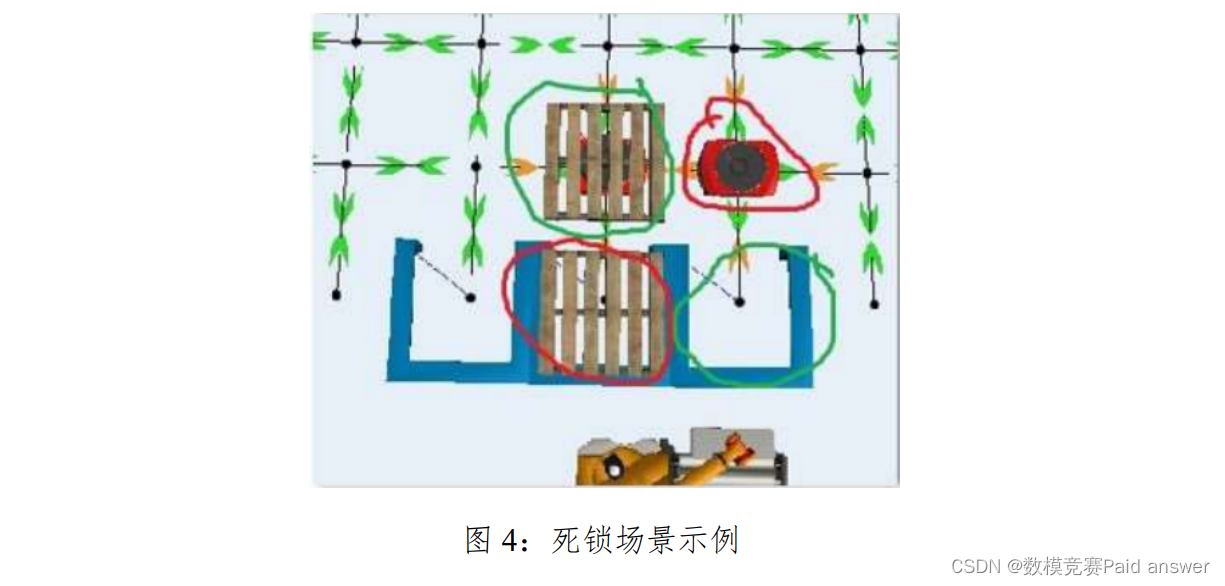
下图是一个死锁场景示例,一个 AGV 去拣选工位取空托盘,另一台AGV 去相邻停靠位放置托盘,他们占据了各自的前进路径节点后都不退让,造成了死锁。
整体求解过程概述(摘要)
针对无人仓的多搬运机器人的路径规划问题,本文综合运用了多目标规划、遗传算法和交通管制法等方法,充分发挥了线性加权和 banach 空间中的向量范数等思想的优势,根据题意构建具体的线性规划模型,并借助 python 软件编程求解。
首先我们对给出的数据进行数据预处理:1)根据 map.csv 中的仓库地图数据,基于每一个节点的坐标画出无向图,基于节点关系构建出邻接矩阵;2)根据邻接矩阵,运用 Floyd 算法求解每个点到其他点的最短距离,得到距离矩阵和路由矩阵;3)通过Python 软件以栅格的形式进行可视化呈现。通过可视化的栅格仓库图,删除不符合实际的数据,因此,在该无人仓中实际可用的小车数量为 19 辆。
针对问题一,本题要求满足以下约束:1)满足所有的订单需求,即实现全部拣选工位都空闲;2)保证在搬运过程中每个机器人尽可能忙;3)每个拣选工位同时容纳的托盘数不超过 3 个停靠位,最终实现最小化全部搬运机器人的行走路径的目标函数。因此,根据题意,我们构建单目标规划模型,基于托盘搬运顺序进行编码,并采用改进的遗传算法和模拟退火两种方法进行对比求解。通过改进的遗传算法求解后可以得到,所有 AGV 的路径总长度为 7316;通过模拟退火算法求解后可以得到所有 AGV 的路径总长度为 7428。通过两种方式的比较,可以得到改进遗传算法使得 AGV 以更短的路径搬运完所需要的商品。
针对问题二,本题需要满足以下约束:1)每个拣选工位对应托盘的商品总量尽可能地平均;2)最小化全部托盘到其默认拣选工位距离总和;3)对仓库内储位上的每个托盘,都指定一个由第一阶段的目标规划唯一确定的默认拣选工位,最终实现全部搬运机器人的行为总路径最小的目标函数。本题在问题一的基础上,需要对仓库进行合理分区。因此,本题建立了两阶段的目标规划模型,其中约束条件 1)和 2)属于第一阶段动态分区规划模型,目的是为了实现仓库的合理分区,约束条件 3)则是在第一阶段的基础上新增加的约束条件,属于第二阶段的路径规划模型。本题设计一种具有新型编码方式的遗传算法来实现储位的分区,通过求解后可以得到在分区情况下所有 AGV 的移动总路径长度为 7453。
针对问题三,本题在满足问题一和问题二的基础上,需要进一步考虑搬运机器人的碰撞和拥堵问题。首先本文确定了路径冲突的三种类型:垂直冲突、相向冲突和追尾冲突,以及通过向量内积进行路径冲突类型的判断。其次,我们建立了交通管制法和优先级规划法模型,并在 AGV 为 12-19 辆的不同情况下均进行 100 次随机实验,最终得到最优的 AGV 数量规划,防止多 AGV 在仓库内的碰撞和拥堵问题。通过模型的求解可以得到在交通管制法下所有 AGV 的总路径最短,且当 AGV 数量减少为 15 时,减少碰撞和拥堵情况是最佳的。
模型假设:
1. 搬运机器人 AGV 完成出库任务后不在停靠位等候,立刻进行回库或者回收任务(且下一个托盘到达拣选工位节点时,前一个托盘必定已完成拣选工作),若拣选工位无托盘,则直接进行下一次出库任务。
2. 满足所有的订单需求时,托盘可置于拣选工位,搬运机器人 AGV 不需要进行回库或者回收任务。
3. 保留节点,视为柱子节点,即障碍物,搬运机器人 AGV 不能到达。
4. 若订单中的货物量超过储位的总量,由补货位节点从高密度区补货的商品放置点通过传送带进行输送,此时不增加搬运机器人 AGV 的工作负担。
5. 出库托盘在拣选工位需要停留一段时间后,等拣选机器人打包发货后才能进行后续的回库或者回收任务。
6. 搬运机器人 AGV 在工作时进行匀速运动,且各相邻栅格间的距离相等,搬运机器人 AGV 通过一个栅格均需要一个单位时间。
7. 假设搬运机器人 AGV 不再进行新任务,但全部拣选工位未都空闲为止时,将搬运机器人 AGV 从拣选工位节点人工移出。
问题分析:
问题一的解析
问题一在不考虑 AGV 机器人存在可能碰撞的问题,设计多 AGV 的调度算法,需要满足以下目标:(1)满足所有订单;(2)让每个机器人尽量忙;(3)全部搬运机器人的行走总路径最小;(4)最忙拣选工位的工作时长最短;(5)在最短的时间内满足订单需求。通过本题的求解,我们可以得到一个合理的多 AGC 的路径规划。具体如图 1-2,红色圆圈表示 AGV,绿色方块表示货架或者托盘,蓝色 X 表示拣选工位,左图为初始各点的分布状态,右图为匹配了最近的 AGV、托盘和工位,使得指定 AGV 去取托盘后再送到工位拣选。
问题二的解析
为了更好地平衡拣选工位的负载,同时预防搬运机器人的局部拥堵,根据拣选工位和库存商品数量对仓库地图进行动态分区。也就是对仓库内储位上的每个托盘,都指定一个默认拣选工位。本题要在问题一的基础上,对 AGV 调度算法进行优化,使得每个拣选工位对应托盘的商品总量尽可能平均,同时要求最小化全部托盘到其默认拣选工位距离总和,更加合理地均衡每个拣选工位在某段时间内的工作量。如图 1-3,对储位区域进行分区,为其分配相对应的默认拣选工位。
问题三的解析
本题考虑了 AGV 的碰撞和拥堵问题,当仓库内同时有多个 AGV 在执行任务时,不可避免有些 AGV 在某个路径节点上相遇,甚至在一些特殊节点处(如托盘回收处),可能还会出现多个 AGV 的拥堵甚至死锁场景。在这样的情况旨在,势必需要有 AGV进行避让,因此本题在问题一和问题二的基础上,考虑可能出现的碰撞情形,在合理的假设下,优化算法,使其具有一定的防碰撞能力。
模型的建立与求解整体论文缩略图
全部论文请见下方“ 只会建模 QQ名片” 点击QQ名片即可
程序代码:(代码和文档not free)
The actual procedure is shown in the screenshot
#include<bits/stdc++.h>
#define MAXN 60 //最大工作量
#define INIT_PRE 3000//道路初始信息素量
#define K 2000 //循环次数
#define DIS 0.5 //信息素消散速率
#define SUPER_START 48
using namespace std;
int totalStep;
int Step[MAXN];
int phe[MAXN][MAXN][MAXN][MAXN];
int n,m;
struct Pair
{int i,j;void get(int a,int b){i=a;j=b;}
}Jobnum[MAXN];
struct Job
{int machine;int len;
}job[MAXN][MAXN];
struct Ant
{int JobStep[MAXN]; //任务已运行步数int path[MAXN];int pathlen;int getFullPath(){int sum=0;for (int i=0;i<pathlen;i++)sum+=path[i];return sum;}Pair paths[MAXN];
};
void init()
{//totalStep=0;memset(phe,0,sizeof(phe));for (int i=0;i<totalStep;i++)for (int j=0;j<totalStep;j++)for (int k=0;k<totalStep;k++)for (int l=0;l<totalStep;l++)phe[i][j][k][l]=INIT_PRE;for (int i=0;i<totalStep;i++)for (int j=0;j<totalStep;j++)phe[SUPER_START][SUPER_START][i][j]=INIT_PRE;return;
}
void Dissipation()
{for (int i=0;i<totalStep;i++)for (int j=0;j<totalStep;j++)for (int k=0;k<totalStep;k++)for (int l=0;l<totalStep;l++)phe[i][j][k][l] *= DIS;for (int i=0;i<totalStep;i++)for (int j=0;j<totalStep;j++)phe[SUPER_START][SUPER_START][i][j]*= DIS;return;
}
struct Recording
{int start;int ed;int job;int machine;
};
int timeCalcu(int Job[], bool draw)
{int sum=0;int machineWorkTime[MAXN];int JobLast[MAXN];int JobStep[MAXN];Recording rec[MAXN];memset(machineWorkTime,0,sizeof(machineWorkTime));memset(JobLast,0,sizeof(JobLast));memset(JobStep,0,sizeof(JobStep));memset(rec,0,sizeof(rec));for (int k = 0; k < totalStep; k++){int i = Job[k];rec[k].start = max(JobLast[i],machineWorkTime[job[i][JobStep[i]].machine]);rec[k].job = i;rec[k].ed = rec[k].start + job[i][JobStep[i]].len;JobLast[i] = rec[k].ed;rec[k].machine = job[i][JobStep[i]].machine;machineWorkTime[job[i][JobStep[i]].machine] = rec[k].ed;JobStep[i]++;}for (int i = 0; i < m; i++){sum = max(sum,machineWorkTime[i]);}if (draw == true){int gantt[MAXN][MAXN];memset(gantt,0,sizeof(gantt));for (int i=0;i<totalStep;i++){for (int j=rec[i].start;j<rec[i].ed;j++){gantt[rec[i].machine][j]=rec[i].job+1;}}for (int i=0;i<m;i++)for (int j=0;j<sum;j++)printf("%d%c",gantt[i][j],j==sum-1?'\n':' ');}return sum;
}
int main()
{while (~scanf("%d%d",&n,&m)){totalStep = 0;for (int i=0;i<n;i++){scanf("%d",&Step[i]);totalStep+=Step[i];for (int j=0;j<Step[i];j++){scanf("%d%d",&job[i][j].machine,&job[i][j].len);}}init();int antnum=totalStep*2;Ant ant[antnum+5];Ant bestAnt;int bstime = 999999;for (int sl=0;sl<10;sl++){//printf("%d/10\n",sl);srand(time(0));memset(ant,0,sizeof(ant));for (int i=0;i<antnum;i++)//第i只蚂蚁的旅程{//printf("sl=%d/%d\n",i,antnum);int nowJob=SUPER_START; //作为图的超级源点ant[i].JobStep[nowJob]=SUPER_START;for (int j=0;j<totalStep;j++){int allpre=0;for (int k=0;k<m;k++){//printf("i:%d j:%d k:%d l:%d ant:%d\n",nowJob,ant[i].JobStep[nowJob],k,ant[i].JobStep[k],i);if (ant[i].JobStep[k]==Step[k]) continue;allpre += phe[nowJob][ ant[i].JobStep[nowJob] ][k][ ant[i].JobStep[k] ];}//printf("%d\n",allpre);int randSelectNum = rand()*rand() % allpre;//printf("OK\n");//printf("摇到的数字是:%d\n",randSelectNum);int select=0;while (randSelectNum>=0){if (ant[i].JobStep[select]==Step[select]) {select++;continue;}randSelectNum -= phe[nowJob][ ant[i].JobStep[nowJob] ][select][ ant[i].JobStep[select] ];select++;}select--;//printf("蚂蚁选择了%d\n",select);//蚂蚁选中的任务ant[i].path[ant[i].pathlen]=select;ant[i].paths[ant[i].pathlen++].get(select,ant[i].JobStep[select]);ant[i].JobStep[select]++;nowJob = select;//printf("选择任务%d 阶段%d\n",select,ant[i].JobStep[select]);}}Dissipation(); //每次蚂蚁行走完后,信息素都会消散for (int i = 0; i < antnum; i++){int ans = timeCalcu(ant[i].path,false);if (ans<bstime && totalStep<=ans){bstime = ans;bestAnt = ant[i];}int reward = 2000/ans; //答案越小,奖励越多。for (int j=0;j<ant[i].pathlen-1;j++){int a = ant[i].paths[j].i;int b = ant[i].paths[j].j;int c = ant[i].paths[j+1].i;int d = ant[i].paths[j+1].j;phe[a][b][c][d] += reward;}}//if (sl==1999)/*for (int i = 0; i < antnum; i++){for (int j=0; j<ant[i].pathlen; j++){printf("%d%c",ant[i].path[j]+1,j==ant[i].pathlen-1?'\n':' ');}printf("\n%d\n",timeCalcu(ant[i].path,true));}*/}printf("bestTime:%d\n",bstime);printf("甘特图:\n");timeCalcu(bestAnt.path,true);printf("加工顺序为:");for (int i=0;i<totalStep;i++)printf("%d%s",bestAnt.path[i]+1,i==totalStep-1?"\n":"->");/*int a[10] = {1,2,1,0,2,1,0,0};timeCalcu(a,true);*/return 0;}
}
全部论文请见下方“ 只会建模 QQ名片” 点击QQ名片即可
相关文章:
2022年MathorCup数学建模B题无人仓的搬运机器人调度问题解题全过程文档加程序
2022年第十二届MathorCup高校数学建模 B题 无人仓的搬运机器人调度问题 原题再现 本题考虑在无人仓内的仓库管理问题之一,搬运机器人 AGV 的调度问题。更多的背景介绍请参看附件-背景介绍。对于无人仓来说,仓库的地图模型可以简化为图的数据结构。 仓库…...
开源项目的演进会遇到哪些“坑”?KubeVela 从发起到晋级 CNCF 孵化的全程回顾
作者:孙健波、曾庆国 点击查看:「开源人说」第五期《KubeVela:一场向应用交付标准的冲锋》 2023 年 2 月,**KubeVela [ 1] ** 经过全体 ToC 投票成功进入 CNCF Incubation,是云原生领域首个晋级孵化的面向应用的交付…...
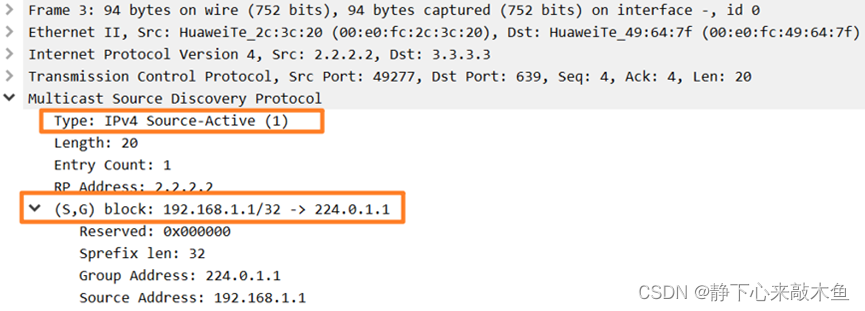
MSDP实验配置
目录 配置MSDP 配置PIM SM协议 配置各PIM SM域内的静态RP 配置MSDP对等体 配置域内的MSDP对等体 AR8和AR9建立EBGP邻居 配置域间的MSDP对等体 进行实验验证 什么是MSDP MSDP(Multicast Source Discovery Protocol)组播源发现协议的简称 用来传递…...
惊!初中生也来卷了……
大家好,我是良许。 前两天在抖音直播的时候,突然来了一位不速之客…… 他自称是初中生,一开始我还有点不太相信,直到跟他连麦,听到他还略带一些稚嫩的声音,我才知道,他没有骗我…… 他说他想学…...

kafka相关配置介绍
kafka默认配置 每个kafka broker中配置文件server.properties默认必须配置的属性如下: broker.id0 num.network.threads2 num.io.threads8 socket.send.buffer.bytes1048576 socket.receive.buffer.bytes1048576 socket.request.max.bytes104857600 log.dirs/tmp/…...
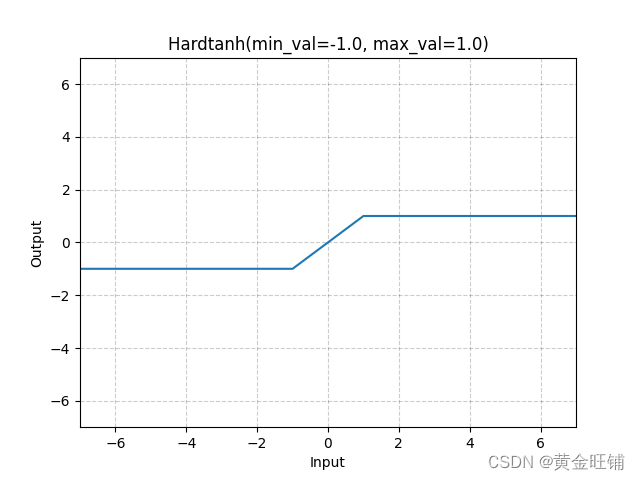
【PyTorch】教程:torch.nn.Hardtanh
torch.nn.Hardtanh 原型 CLASS torch.nn.Hardtanh(min_val- 1.0, max_val1.0, inplaceFalse, min_valueNone, max_valueNone) 参数 min_val ([float]) – 线性区域的最小值,默认为 -1max_val ([float]) – 线性区域的最大值,默认为 1inplace ([bool]) …...

神垕古镇景区5A级十年都没有实现的三大主因
钧 瓷 内 参 第40期(总第371期) 2023年3月5日 神垕古镇景区5A级十年都没有实现的三大主因 这是2013年,禹州市市政府第一次提出创建5A级景区到今年三月份整整十年啊! 目前神垕古镇景区是4A级景区,5A级一直进行中&a…...

react函数组件常用的几个钩子函数useState、useEffect、useRef、useCallback
react框架react框架包括包括两大类:类组件函数组件。类组件构成:constructor自定义方法。调用方法通过this.方法名()。constructor(superstate)构造器里面必有super字段。render()方法里面写页面布局。函数组件构成:各种钩子函数return()方法…...
4N60-ASEMI高压MOS管4N60
编辑-Z 4N60在TO-220封装里的静态漏极源导通电阻(RDS(ON))为2.5Ω,是一款N沟道高压MOS管。4N60的最大脉冲正向电流ISM为16A,零栅极电压漏极电流(IDSS)为1uA,其工作时耐温度范围为-55~150摄氏度。4N60功耗(…...
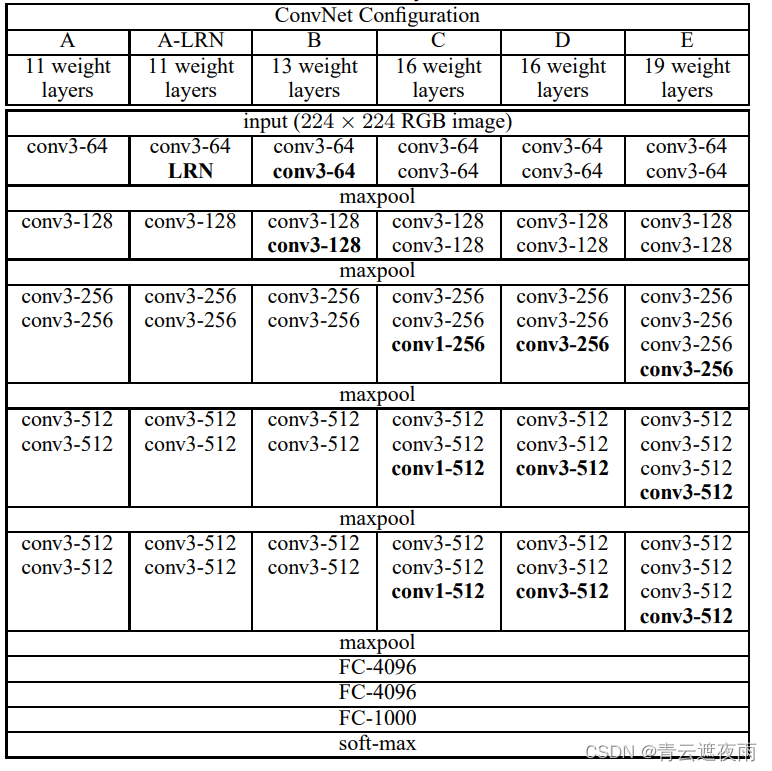
现代神经网络(VGG),并用VGG16进行实战CIFAR10分类
专栏:神经网络复现目录 本章介绍的是现代神经网络的结构和复现,包括深度卷积神经网络(AlexNet),VGG,NiN,GoogleNet,残差网络(ResNet),稠密连接网络…...
)
Java代码弱点与修复之——Dereference null return value(间接引用空返回值)
弱点描述 Dereference null return value,间接引用空返回值。是Coverity Scan静态代码分析工具中的一个警告,表示代码中有对可能为空(null)的方法或函数返回值进行间接引用(Dereference)操作。 该类型的漏洞可能会导致 NullPointerException 异常,并且会导致程序崩溃或…...

【冲刺蓝桥杯的最后30天】day3
大家好😃,我是想要慢慢变得优秀的向阳🌞同学👨💻,断更了整整一年,又开始恢复CSDN更新,从今天开始更新备战蓝桥30天系列,一共30天,如果对你有帮助或者正在备…...

光伏发电嵌入式ARM工控机
随着智慧电力技术的不断发展和普及,越来越多的电力设备和系统需要采用先进的控制和监测技术来实现自动化管理和优化运行。其中,嵌入式 ARM 控制器技术在智慧电力领域中得到了广泛应用。同时,导轨安装也是该技术的重要应用场景之一。 导轨安装…...
推荐 7 个 Vue.js 插件,也许你的项目用的上(五)
当我们可以通过使用库轻松实现相同的结果时,为什么还要编写自定义功能?开发人员最好的朋友和救星就是这些第三方库。我相信一个好的项目会利用一些可用的最佳库。Vue.js 是创建用户界面的最佳 JavaScript 框架之一。这篇文章是关于 Vue.js 的优秀库系列的…...

1.1基于知识图谱的项目实战:优酷搜索泛查询意图优化
NLU的技术实现主要分为在线识别和离线数据挖掘两块。 1.在线识别 NLU的在线识别技术栈如下图所示,共由下述2个部分组成: 第一个部分是Slot Filling(成分分析),负责对query进行实体识别和槽位抽取;第二部分Inention Detection(意图识别),根据提取的槽位进行意图的判定(目…...
[java Spring JdbcTemplate配合mysql实现数据批量删除
之前的文章 java Spring JdbcTemplate配合mysql实现数据批量添加和文章java Spring JdbcTemplate配合mysql实现数据批量修改 先后讲解了 mysql数据库的批量添加和批量删除操作 会了这两个操作之后 批量删除就不要太简单 我们看到数据库 这里 我们用的是mysql工具 这里 我们有…...
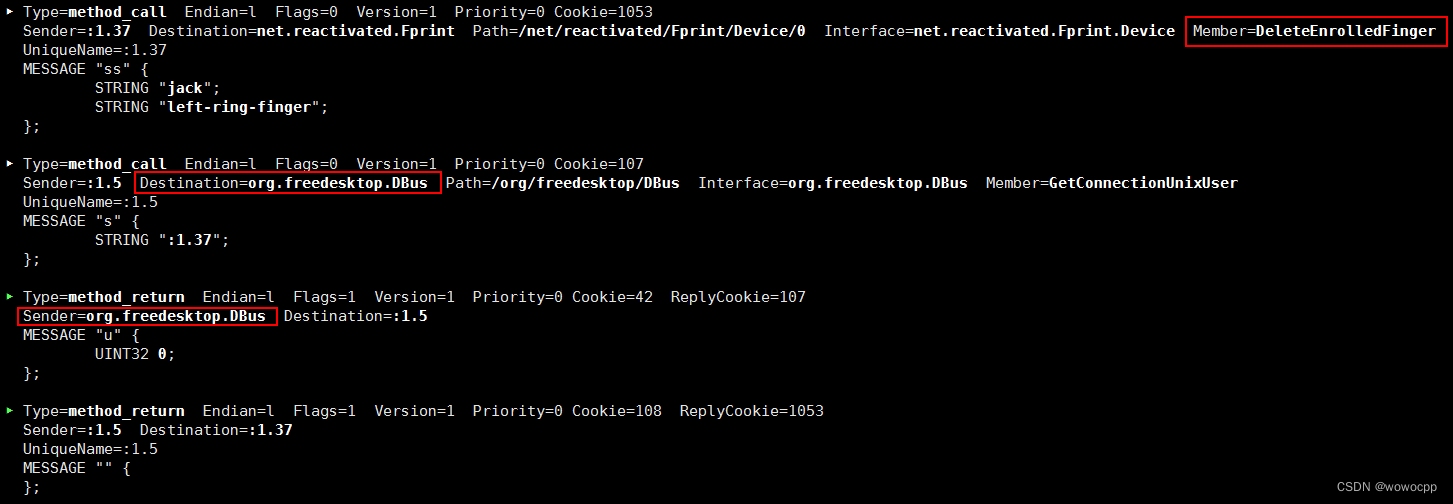
uos 20 统信 fprintd 记录
uos 20 统信 fprintd 记录 sudo busctl deepin-authenticate.service /usr/lib/systemd/system/deepin-authenticate.service [Unit] DescriptionDeepin Authentication[Service] Typedbus BusNamecom.deepin.daemon.Authenticate ExecStart/usr/lib/deepin-authenticate/d…...

vue移动端h5,文本溢出显示省略号,且展示‘更多’按钮
问题: 元素宽度100%,宽度会随着浏览器缩放而变化。元素内文本超过4行时显示省略号,同时展示‘更多’按钮,点击更多按钮展示全部文本。如下图所示 超出四行显示省略号(…)的代码 .content{overflow:hidden;text-overflow: elli…...

php宝塔搭建部署实战兰空图床程序网站PHP源码
大家好啊,我是测评君,欢迎来到web测评。 本期给大家带来一套Lsky Pro兰空图床程序网站PHP的源码。感兴趣的朋友可以自行下载学习。 技术架构 PHP8.0 nginx mysql5.7 JS CSS HTMLcnetos7以上 宝塔面板 文字搭建教程 下载源码,宝塔添加…...
如何开展测试?)
软件测试面试:拿到一个产品(版本)如何开展测试?
产品提测后,如何开展测试? 我们都了解软件测试的执行流程,......提测-冒烟测试-详细测试-提交缺陷报告-回归测试,但软件测试并不总是线性过程,它甚至可能是螺旋结构,不断地试错,不断地迭代&…...

SciencePlots——绘制论文中的图片
文章目录 安装一、风格二、1 资源 安装 # 安装最新版 pip install githttps://github.com/garrettj403/SciencePlots.git# 安装稳定版 pip install SciencePlots一、风格 简单好用的深度学习论文绘图专用工具包–Science Plot 二、 1 资源 论文绘图神器来了:一行…...

Admin.Net中的消息通信SignalR解释
定义集线器接口 IOnlineUserHub public interface IOnlineUserHub {/// 在线用户列表Task OnlineUserList(OnlineUserList context);/// 强制下线Task ForceOffline(object context);/// 发布站内消息Task PublicNotice(SysNotice context);/// 接收消息Task ReceiveMessage(…...

unix/linux,sudo,其发展历程详细时间线、由来、历史背景
sudo 的诞生和演化,本身就是一部 Unix/Linux 系统管理哲学变迁的微缩史。来,让我们拨开时间的迷雾,一同探寻 sudo 那波澜壮阔(也颇为实用主义)的发展历程。 历史背景:su的时代与困境 ( 20 世纪 70 年代 - 80 年代初) 在 sudo 出现之前,Unix 系统管理员和需要特权操作的…...
免费数学几何作图web平台
光锐软件免费数学工具,maths,数学制图,数学作图,几何作图,几何,AR开发,AR教育,增强现实,软件公司,XR,MR,VR,虚拟仿真,虚拟现实,混合现实,教育科技产品,职业模拟培训,高保真VR场景,结构互动课件,元宇宙http://xaglare.c…...

省略号和可变参数模板
本文主要介绍如何展开可变参数的参数包 1.C语言的va_list展开可变参数 #include <iostream> #include <cstdarg>void printNumbers(int count, ...) {// 声明va_list类型的变量va_list args;// 使用va_start将可变参数写入变量argsva_start(args, count);for (in…...
:工厂方法模式、单例模式和生成器模式)
上位机开发过程中的设计模式体会(1):工厂方法模式、单例模式和生成器模式
简介 在我的 QT/C 开发工作中,合理运用设计模式极大地提高了代码的可维护性和可扩展性。本文将分享我在实际项目中应用的三种创造型模式:工厂方法模式、单例模式和生成器模式。 1. 工厂模式 (Factory Pattern) 应用场景 在我的 QT 项目中曾经有一个需…...

xmind转换为markdown
文章目录 解锁思维导图新姿势:将XMind转为结构化Markdown 一、认识Xmind结构二、核心转换流程详解1.解压XMind文件(ZIP处理)2.解析JSON数据结构3:递归转换树形结构4:Markdown层级生成逻辑 三、完整代码 解锁思维导图新…...

前端开发者常用网站
Can I use网站:一个查询网页技术兼容性的网站 一个查询网页技术兼容性的网站Can I use:Can I use... Support tables for HTML5, CSS3, etc (查询浏览器对HTML5的支持情况) 权威网站:MDN JavaScript权威网站:JavaScript | MDN...

【大模型】RankRAG:基于大模型的上下文排序与检索增强生成的统一框架
文章目录 A 论文出处B 背景B.1 背景介绍B.2 问题提出B.3 创新点 C 模型结构C.1 指令微调阶段C.2 排名与生成的总和指令微调阶段C.3 RankRAG推理:检索-重排-生成 D 实验设计E 个人总结 A 论文出处 论文题目:RankRAG:Unifying Context Ranking…...
leetcode_69.x的平方根
题目如下 : 看到题 ,我们最原始的想法就是暴力解决: for(long long i 0;i<INT_MAX;i){if(i*ix){return i;}else if((i*i>x)&&((i-1)*(i-1)<x)){return i-1;}}我们直接开始遍历,我们是整数的平方根,所以我们分两…...