Meta最新模型LLaMA细节与代码详解
Meta最新模型LLaMA细节与代码详解
- 0. 简介
- 1. 项目环境依赖
- 2. 模型细节
- 2.1 RMS Pre-Norm
- 2.2 SwiGLU激活函数
- 2.3 RoPE旋转位置编码
- 3. 代码解读
- 3.1 tokenizer
- 3.2 model
- 3.2.1 模型细节详解
- 3.2.2 transformer构建
- 3.3 generate
- 4. 推理
0. 简介
今天介绍的内容是Facebook Meta AI最新提出的语言模型LLaMA,该模型声称以更小的体积,在多数任务上超越了GPT-3的性能。
模型相关项目已经开源:
https://github.com/facebookresearch/llama
论文地址:https://scontent-tpe1-1.xx.fbcdn.net/v/t39.8562-6/333078981_693988129081760_4712707815225756708_n.pdf?_nc_cat=108&ccb=1-7&_nc_sid=ad8a9d&_nc_ohc=ov6yTHfLfNQAX-guxqd&_nc_ht=scontent-tpe1-1.xx&oh=00_AfDMyTEYewg-cHT9_4_sUaW5h0gqrqwjcNMylD9HtVFCWA&oe=6401C9E2
由于模型较大,目前的设备暂时没有办法支持进一步的实验,但是其模型代码已经开源,所以可以先通过代码了解一下模型结构上的一些细节,今天就针对github上放出的代码,了解一下模型的细节。
此外,该模型其实就是transformer做了一点细节上的改进,真正更有价值的工作应该在数据和训练方面。通过阅读代码,可以对transformer的基础构造进行复习,并且了解大模型如何在多卡上分布推理。
由于该项目源码几乎没有注释,这就肯定会给很多同学阅读时带来困扰,所以本文顺带着就把代码部分详细的介绍一下。
1. 项目环境依赖
此项目给出的环境依赖只有4个:
- torch
- fairscale
- fire
- sentencepiece
其中torch不比多讲,fairscale是用来做GPU分布的,一般是当使用DDP仍然遇到超显存的问题时使用fairscale。目前fairscale我还没有试过,在下文的源码介绍中,我会用torch中对应的基础网络替代fairscale中的结构层进行介绍。fire是一个命令行工具,用或者不用他都可以,sentencepiece是用于tokenizer的工具包,会在tokenizer部分简单介绍。
2. 模型细节
由于该模型就是用的transformer的decoder,所以在结构上它与GPT是非常类似的,只是有一些细节需要注意一下。
2.1 RMS Pre-Norm
关于Pre-Norm和Post-Norm是神经网络中老生常谈的话题,目前比较普遍的被大家接受的结论是,相同的深度条件下,Post-Norm的效果要优于Pre-Norm,因为Pre-Norm实际上相当于通过了一个更宽的网络而非更深的网络,所以在同等深度下,Pre-Norm的实际效果相当于一个更浅却更宽的网络,详细的推理过程参考:https://spaces.ac.cn/archives/9009。
然而在LLaMA中却采用了Pre-Norm,或许是因为模型够深(7B,13B,30B,65B的模型,transformer layer数量分别为32,40,60,80),而Pre-Norm的恒等分支更加明显,有利于梯度的传播(这部分暂时没有想到很合理的解释,如果有更好的理解,欢迎在评论区补充)。
RMS Norm(Root Mean Square Layer Normalization),是一般LayerNorm的一种变体,可以在梯度下降时令损失更加平滑。
与layerNorm相比,RMS Norm的主要区别在于去掉了减去均值的部分(re-centering),只保留方差部分(re-scaling),从归一化的表达式上可以直观地看出:
- 一般的LN:
a‾i=ai−μσgi\overline{a}_i = \frac {a_i- \mu} \sigma g_iai=σai−μgi
其中,
μ=1n∑i=1nai\mu = \frac 1 n \sum_{i=1}^na_iμ=n1i=1∑nai
σ=1n∑i=1n(ai−μ)2\sigma= \sqrt {\frac 1 n \sum_{i=1}^n{{(a_i-\mu)}^2}}σ=n1i=1∑n(ai−μ)2
- RMS Norm:
a‾i=aiRMS(a)gi\overline{a}_i = \frac {a_i} {RMS(a)} g_i ai=RMS(a)aigi
其中,
RMS(a)=1n∑i=1nai2{RMS(a)}=\sqrt {\frac 1 n \sum_{i=1}^n{{a_i}^2}} RMS(a)=n1i=1∑nai2
可以看到,二者的区别就在于有没有减去均值。至于RMS Norm为什么有用,需要求梯度进行分析,感兴趣的同学可以阅读RMS Norm的论文。
2.2 SwiGLU激活函数
LLaMA采用SwiGLU替换了原有的ReLU。
采用SwiGLU的FNN,在论文中以如下公式进行表述:
FFNswiGLU(x,W,V,W2)=(Swish1(xW)⊗xV)W2FFN_{swiGLU}(x, W, V, W_2) = (Swish_1(xW)\otimes xV)W_2FFNswiGLU(x,W,V,W2)=(Swish1(xW)⊗xV)W2
其中,Swishβ(x)=xσ(βx)Swish_\beta(x) = x\sigma(\beta x)Swishβ(x)=xσ(βx), (Ramachandran et al., 2017.)
2.3 RoPE旋转位置编码
RoPE(Rotary Position Embedding)旋转位置编码,是苏剑林老师提出的一种旋转位置编码方法,其思想是采用绝对位置编码的形式,实现相对位置编码。这一部分比较关键,如果不理解的话,后边的代码估计就看不懂了。读懂RoPE涉及一点复变函数的基础知识,不过如果你没有学过的话也没有关系。
位置编码对大模型而言尤为重要,因为既然是要训练大模型,那么长文本的表征和模型对于长文本的建模能力就显得非常重要。(但是对于绝对位置编码,我有一个直观地感受,认为其本质上不适用于长文本的场景,因为它会直接导致模型的Embedding层被无限放大,并且由于数据分布在seq_len方向上通常是长尾的,这又会必然导致绝对位置编码的矩阵在尾部会越来越稀疏,一方面造成资源浪费,另一方面这种表示方法直观上就很不利于模型的学习,因为它与我们实际场景是有很大的矛盾的。而RoPE虽然具有相对位置编码的性质,但是从代码部分可以看出,在构造的时候,其也是受到了最大长度的限制的。关于这一点,我无法严谨得说明,只是一点个人的想法。)。
而RoPE的巧妙之处在于,它既保留了绝对位置编码中的绝对位置信息,又保留了在内积运算下,对位置信息的相对性。
RoPE主要借助了复数的思想。为了引入复数,首先假设了在加入位置信息之前,原有的编码向量是二维行向量qmq_mqm和knk_nkn,其中mmm和nnn是绝对位置,现在需要构造一个变换,将mmm和nnn引入到qmq_mqm和knk_nkn中,即寻找变换:
qm~=f(q,m),kn~=f(k,n)\tilde {q_m} = f(q, m), \tilde{k_n} = f(k, n) qm~=f(q,m),kn~=f(k,n)
考虑到Attention的核心计算是内积:
Attention(Q,K,V)=softmax(QKTdk)VAttention(Q, K,V) = softmax(\frac {QK^T} {\sqrt{d_k}})VAttention(Q,K,V)=softmax(dkQKT)V
所以,寻求的这个f(∗)f(*)f(∗)变换,应该具有特性:⟨f(q,m),f(k,n)⟩=g(q,k,m−n)\langle f(q, m), f(k, n) \rangle = g(q, k, m-n)⟨f(q,m),f(k,n)⟩=g(q,k,m−n)
这里直接说结论,寻求的变换就是qmeimθq_me^{im\theta}qmeimθ,也就是给qmq_mqm乘以eimθe^{im\theta}eimθ,相应地,knk_nkn乘以einθe^{in\theta}einθ。
具体的求解过程,请参考苏剑林老师的博客。
做了这样一个变换之后,根据复数的特性,有:
⟨qm,kn⟩=Re[qmkn∗]\langle q_m, k_n \rangle = Re[q_mk^*_n]⟨qm,kn⟩=Re[qmkn∗]
也就是,如果把二维向量看做复数,那么它们的内积,等于一个复数乘以另一个复数的共轭,得到的结果再取实部。
带入上面的变换,也就有:
⟨qmeimθ,kneinθ⟩=Re[(qmeimθ)(kneinθ)∗]=Re[qmkn∗ei(m−n)θ]\langle q_me^{im\theta}, k_ne^{in\theta} \rangle = Re[(q_me^{im\theta}) (k_ne^{in\theta})^*] =Re[q_mk_n^*e^{i(m-n)\theta}]⟨qmeimθ,kneinθ⟩=Re[(qmeimθ)(kneinθ)∗]=Re[qmkn∗ei(m−n)θ]
这样一来,内积的结果就只依赖于(m−n)(m-n)(m−n),也就是相对位置了。换言之,经过这样一番操作,通过给Embedding添加绝对位置信息,可以使得两个token的编码,经过内积变换(self-attn)之后,得到结果,是受它们位置的差值,即相对位置影响的。
于是对于任意的位置为mmm的二维向量[x,y][x, y][x,y],把它看做复数,乘以eimθe^{im\theta}eimθ,而根据欧拉公式,有:
eimθ=cosmθ+isinmθe^{im\theta}=\cos{m\theta}+i\sin{m\theta}eimθ=cosmθ+isinmθ
于是上述的相乘变换也就变成了:
(x+iy)eimθ=(xcosmθ−ysinmθ)+i(xsinmθ+ycosmθ)(x+iy)e^{im\theta}=(x\cos{m\theta}-y\sin{m\theta})+i(x\sin{m\theta}+y\cos{m\theta})(x+iy)eimθ=(xcosmθ−ysinmθ)+i(xsinmθ+ycosmθ)
把上述式子写成矩阵形式:
f((q0,q1),m)=[cosmθ−sinmθsinmθcosmθ][q0q1]f((q_0, q_1), m) = \begin{bmatrix} {\cos{m\theta}}&{-\sin{m\theta}} \\ {\sin{m\theta}}&{\cos{m\theta}} \\ \end{bmatrix} \begin{bmatrix} q_0\\q_1\end{bmatrix}f((q0,q1),m)=[cosmθsinmθ−sinmθcosmθ][q0q1]
而这个变换的几何意义,就是在二维坐标系下,对向量(q0,q1)(q_0, q_1)(q0,q1)进行了旋转,因而这种位置编码方法,被称为旋转位置编码。
根据刚才的结论,结合内积的线性叠加性,可以将结论推广到高维的情形。可以理解为,每两个维度一组,进行了上述的“旋转”操作,然后再拼接在一起:
[cosmθ0−sinmθ000⋯00sinmθ0cosmθ000⋯0000cosmθ1−sinmθ1⋯0000sinmθ1cosmθ1⋯00⋮⋮⋮⋮⋱⋮⋮0000⋯cosmθd/2−1−sinmθd/2−10000⋯sinmθd/2−1cosmθd/2−1][q0q1q2q3⋮qd−2qd−1]\begin{bmatrix} \cos{m\theta_0} & -\sin{m\theta_0} & 0 & 0 &{\cdots} & 0 & 0 \\ \sin{m\theta_0} & \cos{m\theta_0} & 0 & 0 &{\cdots} & 0 & 0 \\ 0 & 0 & \cos{m\theta_1} & -\sin{m\theta_1} &{\cdots} & 0 & 0 \\ 0 & 0 & \sin{m\theta_1} & \cos{m\theta_1} &{\cdots} & 0 & 0 \\ \vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots \\ 0 & 0 & 0 & 0 & \cdots & \cos{m\theta_{{d/2}-1}} & -\sin{m\theta_{{d/2}-1}}\\ 0 & 0 & 0 & 0 & \cdots & \sin{m\theta_{{d/2}-1}} & \cos{m\theta_{{d/2}-1}} \end{bmatrix} \begin{bmatrix} q_0\\ q_1 \\ q_2 \\ q_3 \\ \vdots \\ q_{d-2} \\ q_{d-1} \end{bmatrix} cosmθ0sinmθ000⋮00−sinmθ0cosmθ000⋮0000cosmθ1sinmθ1⋮0000−sinmθ1cosmθ1⋮00⋯⋯⋯⋯⋱⋯⋯0000⋮cosmθd/2−1sinmθd/2−10000⋮−sinmθd/2−1cosmθd/2−1q0q1q2q3⋮qd−2qd−1
由于矩阵的稀疏性,会造成计算上的浪费,所以在计算时采用逐位相乘再相加的方式进行:
[q0q1q2q3⋮qd−2qd−1]⊗[cosmθ0cosmθ0cosmθ1cosmθ1⋮cosmθd/2−1cosmθd/2−1]+[−q1q0−q3q2⋮−qd−1qd−2]⊗[sinmθ0sinmθ0sinmθ1sinmθ1⋮sinmθd/2−1sinmθd/2−1]\begin{bmatrix} q_0\\ q_1 \\ q_2 \\ q_3 \\ \vdots \\ q_{d-2} \\ q_{d-1} \end{bmatrix} \otimes \begin{bmatrix} \cos{m\theta_0} \\ \cos{m\theta_0} \\ \cos{m\theta_1} \\ \cos{m\theta_1} \\ \vdots \\ \cos{m\theta_{{d/2}-1}} \\ \cos{m\theta_{{d/2}-1}} \end{bmatrix} + \begin{bmatrix} -q_1\\ q_0 \\ -q_3 \\ q_2 \\ \vdots \\ -q_{d-1} \\ q_{d-2} \end{bmatrix} \otimes \begin{bmatrix} \sin{m\theta_0} \\ \sin{m\theta_0} \\ \sin{m\theta_1} \\ \sin{m\theta_1} \\ \vdots \\ \sin{m\theta_{{d/2}-1}} \\ \sin{m\theta_{{d/2}-1}} \end{bmatrix} q0q1q2q3⋮qd−2qd−1⊗cosmθ0cosmθ0cosmθ1cosmθ1⋮cosmθd/2−1cosmθd/2−1+−q1q0−q3q2⋮−qd−1qd−2⊗sinmθ0sinmθ0sinmθ1sinmθ1⋮sinmθd/2−1sinmθd/2−1
其中⊗\otimes⊗为矩阵逐位相乘操作。代码中具体的计算过程,会有所出入,具体见下文。
3. 代码解读
3.1 tokenizer
tokenizer这部分没有太多可以讲的,主要就是用到了sentencepiece工具。
from sentencepiece import SentencePieceProcessor
from logging import getLogger
from typing import List
import oslogger = getLogger()class Tokenizer:def __init__(self, model_path: str):# reload tokenizerassert os.path.isfile(model_path), model_pathself.sp_model = SentencePieceProcessor(model_file=model_path)logger.info(f"Reloaded SentencePiece model from {model_path}")# BOS / EOS token IDsself.n_words: int = self.sp_model.vocab_size()self.bos_id: int = self.sp_model.bos_id()self.eos_id: int = self.sp_model.eos_id()self.pad_id: int = self.sp_model.pad_id()logger.info(f"#words: {self.n_words} - BOS ID: {self.bos_id} - EOS ID: {self.eos_id}")assert self.sp_model.vocab_size() == self.sp_model.get_piece_size()def encode(self, s: str, bos: bool, eos: bool) -> List[int]:assert type(s) is strt = self.sp_model.encode(s)if bos:t = [self.bos_id] + tif eos:t = t + [self.eos_id]return tdef decode(self, t: List[int]) -> str:return self.sp_model.decode(t)
3.2 model
3.2.1 模型细节详解
model这部分的主要目的就是构建transformer,由于LLaMA对transformer在细节上做了一点改动,所以这里在介绍transformer部分之前,先结合前文模型细节介绍几个辅助函数:
(1)RMSNorm:
这部分的基本原理在上文中已经介绍过了,这里对代码部分进行简单的解释:
- x是输入
- weight是末尾乘的可训练参数
- x.pow(2)是平方
- mean(-1)实在最后一个维度(即hidden特征维度)上取平均
- eps防止取倒数之后分母为0
- torch.rsqrt是开平方并取倒数
结合上文的公式来看,是不难理解的。
class RMSNorm(torch.nn.Module):def __init__(self, dim: int, eps: float = 1e-6):super().__init__()self.eps = epsself.weight = nn.Parameter(torch.ones(dim))def _norm(self, x):return x * torch.rsqrt(x.pow(2).mean(-1, keepdim=True) + self.eps)def forward(self, x):output = self._norm(x.float()).type_as(x)return output * self.weight
(2)RoPE旋转位置编码:
为了实现旋转位置编码,定义了三个辅助函数:
def precompute_freqs_cis(dim: int, end: int, theta: float = 10000.0):freqs = 1.0 / (theta ** (torch.arange(0, dim, 2)[: (dim // 2)].float() / dim))t = torch.arange(end, device=freqs.device) # type: ignorefreqs = torch.outer(t, freqs).float() # type: ignorefreqs_cis = torch.polar(torch.ones_like(freqs), freqs) # complex64return freqs_cisdef reshape_for_broadcast(freqs_cis: torch.Tensor, x: torch.Tensor):ndim = x.ndimassert 0 <= 1 < ndimassert freqs_cis.shape == (x.shape[1], x.shape[-1])shape = [d if i == 1 or i == ndim - 1 else 1 for i, d in enumerate(x.shape)]return freqs_cis.view(*shape)def apply_rotary_emb(xq: torch.Tensor,xk: torch.Tensor,freqs_cis: torch.Tensor,
) -> Tuple[torch.Tensor, torch.Tensor]:xq_ = torch.view_as_complex(xq.float().reshape(*xq.shape[:-1], -1, 2))xk_ = torch.view_as_complex(xk.float().reshape(*xk.shape[:-1], -1, 2))freqs_cis = reshape_for_broadcast(freqs_cis, xq_)xq_out = torch.view_as_real(xq_ * freqs_cis).flatten(3)xk_out = torch.view_as_real(xk_ * freqs_cis).flatten(3)return xq_out.type_as(xq), xk_out.type_as(xk)
这一部分是整个项目中,最不容易理解的部分,因为它跟一般的位置编码不同,即便是对transformer结构非常了解的同学,如果没有认真读过RoPE,对这一部分代码还是很难读明白。
看懂这一部分代码,最关键的是弄清楚其中的变量freqs_cis所指是什么东西。
为了搞懂这部分,我们需要先了解几个torch中不太常用的方法:
(1)torch.view_as_complex
把一个tensor转为复数形式,要求这个tensor的最后一个维度形状为2。
torch.view_as_complex(torch.Tensor([[1, 2], [3, 4], [5, 6]]))
# tensor([1.+2.j, 3.+4.j, 5.+6.j])
(2)torch.view_as_real
把复数tensor变回实数,可以看做是是刚才操作的逆变换。
torch.view_as_real(torch.view_as_complex(torch.Tensor([[1, 2], [3, 4], [5, 6]])))
# tensor([[1., 2.],
# [3., 4.],
# [5., 6.]])
(3)torch.outer
一个向量的转置乘以另一个向量:torch.outer(a, b) = a^T * b
a = torch.arange(1, 5)
b = torch.arange(1, 4)
torch.outer(a, b)
# tensor([[ 1, 2, 3],
# [ 2, 4, 6],
# [ 3, 6, 9],
# [ 4, 8, 12]])
(4)torch.polar
torch.polar(abs, angle)利用一个绝对数值,和一个角度值,在极坐标下构造一个复数张量abs∗cos(angle)+abs∗sin(angle)jabs * \cos(angle) + abs * \sin(angle) jabs∗cos(angle)+abs∗sin(angle)j。
torch.polar(torch.tensor([1], dtype=torch.float64), torch.tensor([np.pi / 2], dtype=torch.float64))
# tensor([6.1232e-17+1.j], dtype=torch.complex128)
接下来进入RoPE的计算,首先为了更加具象的表达,我们在此对各个维度的尺寸进行假设,假设batch_size为2,seq_len固定为512,attention_head的数量为12,每个attention_head的维度为64,那么,对于输入到multi-head attn中的输入xqx_qxq的尺寸就是(2, 512, 12, 64)。
回到我们刚才提出的问题,freqs_cis所指是什么东西,其实它就是需要计算出来的mθm\thetamθ也就是跟绝对位置相关的旋转的角度,在极坐标下对应的复数tensor。
而函数precompute_freqs_cis就是提前将这些旋转角度对应的tensor给创建出来,并可以重复利用。因为确定了序列的最大长度,所以这个tensor是固定死的。根据后续的数据流我们可以发现,在调用该函数时,传入的两个参数分别是attention_head的维度,以及最大长度的两倍,具象地,也就是64和1024。
我们逐行来理解这个方法:
freqs = 1.0 / (theta ** (torch.arange(0, dim, 2)[: (dim // 2)].float() / dim))
首先torch.arange创建了一个tensor,[0,2,4,...,60,62][0, 2, 4, ..., 60, 62][0,2,4,...,60,62],然后统一除以64,把它变成分数,然后整体作为基础角度的指数,它的shape是(32)
t = torch.arange(end, device=freqs.device)
t比较容易理解,也就是绝对位置信息,它的shape是(1024)。
freqs = torch.outer(t, freqs).float()
于是根据torch.outer运算,我们得到了一个shape为(1024, 32)的tensor。其意义也就是将每一个绝对位置,分配到对应的角度,相乘。直观理解一下,就是每一个绝对位置上,都有32个角度。为什么是这样的呢,回顾计算的公式,对于旋转矩阵,每两个元素为一组,它们乘以的角度是同一个θ\thetaθ,所以这个(1024, 32),在后续的过程中,就可以reshape成(512, 64),并且在64的那个维度上,每两个是相同的。
freqs_cis = torch.polar(torch.ones_like(freqs), freqs)
这一步就是在生成我们需要的位置信息,直观理解一下,像是在复平面内,以原点为中心,转了1024组,每一组64个的单位向量,它的shape是(1024, 64)。
reshape_for_broadcast方法,是把freqs_cis变成和输入的tensor相同的形状,结合下边的另一个方法一起介绍。
然后来看apply_rotary_emb方法,这个方法其实就是把位置信息添加到原有的编码结果上,在multi-head attention阶段调用。我们还是逐行来看:
xq_ = torch.view_as_complex(xq.float().reshape(*xq.shape[:-1], -1, 2))
上文中,我们假设了输入xqx_qxq的尺寸就是(2, 512, 12, 64),那么这一句操作的reshape,就是把它变成(2, 512, 12, -1, 2),也就是(2, 512, 12, 32, 2)。xkx_kxk同理,略。紧接着把它变成复数形式,也就是变成了(2, 512, 12, 32)的形状。
然后进入到reshape_for_broadcast方法:
shape = [d if i == 1 or i == ndim - 1 else 1 for i, d in enumerate(x.shape)]
return freqs_cis.view(*shape)
这个方法的作用是为了把freqs_cis变成和输入的tensor相同的形状。需要注意的是,这里的freqs_cis并不是precompute_freqs_cis生成的形状为(1024, 64)的那个tensor,而是根据输入的绝对位置,在(1024, 64)的tensor中,截取了长度为当前seq_len的一部分,代码在Transformer类的forward方法中:
freqs_cis = self.freqs_cis[start_pos : start_pos + seqlen]
也就是说,假如当前输入的序列长度是512,那么截取出来的这个新的freqs_cis,形状就是(512, 64),reshape之后,形状就变成了(1, 512, 1, 32),也就是在每一个位置上,都对应有32个角度,根据刚刚torch.polar的介绍,当我们固定绝对值(也就是向量的模长)时,角度就可以在笛卡尔坐标系下唯一确定一个复数,这样一来也就是32个复数,即64个特征维度,所以就可以对应的将它融合到每个attention head的64个特征中去了。
reshape之后,就是将位置信息融入query和key中:
xq_out = torch.view_as_real(xq_ * freqs_cis).flatten(3)
这一步将二者相乘得到的复数tensor,重新转换为实数形式,得到的shape为(2, 512, 12, 32, 2),然后再flatten成(2, 512, 12, 64),这样一来,就变回了和最开始xqx_qxq相同的形状,也就完成了将位置信息融入到xqx_qxq的这一操作。xkx_kxk同理。
以上就是添加位置编码的整个过程,建议这一部分仔细阅读,反复理解。
至于SwiGLU激活函数,可以通过调用torch内置方法F.silu()实现,会在下文的FFN部分介绍。
3.2.2 transformer构建
接下来是transformer模型的构建。通常,我们在构建transformer时,是按Block构建的,每个transformer Block包含SA和FFN两部分,然后再通过堆叠block的形式,构建起整个transformer网络,LLaMA也是这样做的,读过BERT或者任何transformer结构的模型源码的同学一定对这个结构非常熟悉了。
首先看SA部分:
class Attention(nn.Module):def __init__(self, args: ModelArgs):super().__init__()self.n_local_heads = args.n_heads // fs_init.get_model_parallel_world_size()self.head_dim = args.dim // args.n_headsself.wq = ColumnParallelLinear(args.dim,args.n_heads * self.head_dim,bias=False,gather_output=False,init_method=lambda x: x,)self.wk = ColumnParallelLinear(args.dim,args.n_heads * self.head_dim,bias=False,gather_output=False,init_method=lambda x: x,)self.wv = ColumnParallelLinear(args.dim,args.n_heads * self.head_dim,bias=False,gather_output=False,init_method=lambda x: x,)self.wo = RowParallelLinear(args.n_heads * self.head_dim,args.dim,bias=False,input_is_parallel=True,init_method=lambda x: x,)self.cache_k = torch.zeros((args.max_batch_size, args.max_seq_len, self.n_local_heads, self.head_dim)).cuda()self.cache_v = torch.zeros((args.max_batch_size, args.max_seq_len, self.n_local_heads, self.head_dim)).cuda()def forward(self, x: torch.Tensor, start_pos: int, freqs_cis: torch.Tensor, mask: Optional[torch.Tensor]):bsz, seqlen, _ = x.shapexq, xk, xv = self.wq(x), self.wk(x), self.wv(x)xq = xq.view(bsz, seqlen, self.n_local_heads, self.head_dim)xk = xk.view(bsz, seqlen, self.n_local_heads, self.head_dim)xv = xv.view(bsz, seqlen, self.n_local_heads, self.head_dim)xq, xk = apply_rotary_emb(xq, xk, freqs_cis=freqs_cis)self.cache_k = self.cache_k.to(xq)self.cache_v = self.cache_v.to(xq)self.cache_k[:bsz, start_pos : start_pos + seqlen] = xkself.cache_v[:bsz, start_pos : start_pos + seqlen] = xvkeys = self.cache_k[:bsz, : start_pos + seqlen]values = self.cache_v[:bsz, : start_pos + seqlen]xq = xq.transpose(1, 2)keys = keys.transpose(1, 2)values = values.transpose(1, 2)scores = torch.matmul(xq, keys.transpose(2, 3)) / math.sqrt(self.head_dim)if mask is not None:scores = scores + mask # (bs, n_local_heads, slen, cache_len + slen)scores = F.softmax(scores.float(), dim=-1).type_as(xq)output = torch.matmul(scores, values) # (bs, n_local_heads, slen, head_dim)output = output.transpose(1, 2).contiguous().view(bsz, seqlen, -1)return self.wo(output)
这一部分看上去会比较复杂,涉及到了很多的计算,但其实它就是最普通的attention,只要牢记attention的核心计算公式,也不难理解。
其中,为了执行多卡并行,这里的Linear层用的都是fairscale中的类,在阅读代码时直接理解为Linear即可。
attention计算的总体过程是:
-
- 输入xxx,分别经过三个Linear得到xq,xk,xvx_q, x_k, x_vxq,xk,xv;
-
- 在xqx_qxq和xkx_kxk中加入旋转位置编码;
-
- 缓存xqx_qxq和xkx_kxk;
-
- 计算softmax(QKTdk)Vsoftmax(\frac {QK^T} {\sqrt{d_k}})Vsoftmax(dkQKT)V。
其中有一个细节就是缓存机制,这里简单介绍一下,很多初学者,甚至NLP老手都容易忽视这个问题。这个机制在模型的训练过程中其实是不发挥作用的,它设计的目的是在generate时减少token的重复计算。
简单解释一下,就是在计算第nnn个token特征的时候,需要用到第1,...,n−11,...,n-11,...,n−1个token,即每次生成时,需要知道前面所有的过往信息,如果每次都从头算的话,那就会造成极大的浪费,所以就没算一个位置的信息,就把它缓存下来。
然后是FFN部分,需要注意的点就是采用的激活函数,以及激活函数的位置:
class FeedForward(nn.Module):def __init__(self,dim: int,hidden_dim: int,multiple_of: int,):super().__init__()hidden_dim = int(2 * hidden_dim / 3)hidden_dim = multiple_of * ((hidden_dim + multiple_of - 1) // multiple_of)self.w1 = ColumnParallelLinear(dim, hidden_dim, bias=False, gather_output=False, init_method=lambda x: x)self.w2 = RowParallelLinear(hidden_dim, dim, bias=False, input_is_parallel=True, init_method=lambda x: x)self.w3 = ColumnParallelLinear(dim, hidden_dim, bias=False, gather_output=False, init_method=lambda x: x)def forward(self, x):return self.w2(F.silu(self.w1(x)) * self.w3(x))
这里与常见模型中的FFN做一下简单的对比,BART中的FFN,用的是fc->act->fc,用了两层全连接;
GPT中的FFN,用的是conv1D->act->conv1D,也是只用了两层。
而LLaMA中的FFN采用了三个全连接层以实现FFNSwiGLU,即
FFNswiGLU(x,W,V,W2)=(Swish1(xW)⊗xV)W2FFN_{swiGLU}(x, W, V, W_2) = (Swish_1(xW)\otimes xV)W_2FFNswiGLU(x,W,V,W2)=(Swish1(xW)⊗xV)W2
然后将SA和FFN这两部分拼在一起就是一个transformer block
class TransformerBlock(nn.Module):def __init__(self, layer_id: int, args: ModelArgs):super().__init__()self.n_heads = args.n_headsself.dim = args.dimself.head_dim = args.dim // args.n_headsself.attention = Attention(args)self.feed_forward = FeedForward(dim=args.dim, hidden_dim=4 * args.dim, multiple_of=args.multiple_of)self.layer_id = layer_idself.attention_norm = RMSNorm(args.dim, eps=args.norm_eps)self.ffn_norm = RMSNorm(args.dim, eps=args.norm_eps)def forward(self, x: torch.Tensor, start_pos: int, freqs_cis: torch.Tensor, mask: Optional[torch.Tensor]):h = x + self.attention.forward(self.attention_norm(x), start_pos, freqs_cis, mask)out = h + self.feed_forward.forward(self.ffn_norm(h))return out
最后利用torch的module list将transformer block进行堆叠,拼上最前头的embedding部分,就是一个完整的transformer(decoder)结构了。
class Transformer(nn.Module):def __init__(self, params: ModelArgs):super().__init__()self.params = paramsself.vocab_size = params.vocab_sizeself.n_layers = params.n_layersself.tok_embeddings = ParallelEmbedding(params.vocab_size, params.dim, init_method=lambda x: x)self.layers = torch.nn.ModuleList()for layer_id in range(params.n_layers):self.layers.append(TransformerBlock(layer_id, params))self.norm = RMSNorm(params.dim, eps=params.norm_eps)self.output = ColumnParallelLinear(params.dim, params.vocab_size, bias=False, init_method=lambda x: x)self.freqs_cis = precompute_freqs_cis(self.params.dim // self.params.n_heads, self.params.max_seq_len * 2)@torch.inference_mode()def forward(self, tokens: torch.Tensor, start_pos: int):_bsz, seqlen = tokens.shapeh = self.tok_embeddings(tokens)self.freqs_cis = self.freqs_cis.to(h.device)freqs_cis = self.freqs_cis[start_pos : start_pos + seqlen]mask = Noneif seqlen > 1:mask = torch.full((1, 1, seqlen, seqlen), float("-inf"), device=tokens.device)mask = torch.triu(mask, diagonal=start_pos + 1).type_as(h)for layer in self.layers:h = layer(h, start_pos, freqs_cis, mask)h = self.norm(h)output = self.output(h[:, -1, :]) # only compute last logitsreturn output.float()
直接看forward部分,输入是token,先做token embedding,然后添加位置信息。对于decoder模型,为了防止标签泄漏,需要mask,所以做了一个上三角的mask矩阵。接下来就是逐层的计算transformer。
3.3 generate
class LLaMA:def __init__(self, model: Transformer, tokenizer: Tokenizer):self.model = modelself.tokenizer = tokenizerdef generate(self,prompts: List[str],max_gen_len: int,temperature: float = 0.8,top_p: float = 0.95,) -> List[str]:bsz = len(prompts)params = self.model.paramsassert bsz <= params.max_batch_size, (bsz, params.max_batch_size)prompt_tokens = [self.tokenizer.encode(x, bos=True, eos=False) for x in prompts]min_prompt_size = min([len(t) for t in prompt_tokens])max_prompt_size = max([len(t) for t in prompt_tokens])total_len = min(params.max_seq_len, max_gen_len + max_prompt_size)tokens = torch.full((bsz, total_len), self.tokenizer.pad_id).cuda().long()for k, t in enumerate(prompt_tokens):tokens[k, : len(t)] = torch.tensor(t).long()input_text_mask = tokens != self.tokenizer.pad_idstart_pos = min_prompt_sizeprev_pos = 0for cur_pos in range(start_pos, total_len):logits = self.model.forward(tokens[:, prev_pos:cur_pos], prev_pos)if temperature > 0:probs = torch.softmax(logits / temperature, dim=-1)next_token = sample_top_p(probs, top_p)else:next_token = torch.argmax(logits, dim=-1)next_token = next_token.reshape(-1)# only replace token if prompt has already been generatednext_token = torch.where(input_text_mask[:, cur_pos], tokens[:, cur_pos], next_token)tokens[:, cur_pos] = next_tokenprev_pos = cur_posdecoded = []for i, t in enumerate(tokens.tolist()):# cut to max gen lent = t[: len(prompt_tokens[i]) + max_gen_len]# cut to eos tok if anytry:t = t[: t.index(self.tokenizer.eos_id)]except ValueError:passdecoded.append(self.tokenizer.decode(t))return decodeddef sample_top_p(probs, p):probs_sort, probs_idx = torch.sort(probs, dim=-1, descending=True)probs_sum = torch.cumsum(probs_sort, dim=-1)mask = probs_sum - probs_sort > pprobs_sort[mask] = 0.0probs_sort.div_(probs_sort.sum(dim=-1, keepdim=True))next_token = torch.multinomial(probs_sort, num_samples=1)next_token = torch.gather(probs_idx, -1, next_token)return next_token
生成的过程如下:
-
- 对prompts进行tokenize,得到token ids;
-
- 计算当前batch的最大长度total_len,用来创建输入的token tensor,最大长度不能超过前文所述缓存的大小;
-
- 从当前batch中,最短的一个prompt的位置,作为生成的开始位置,开始生成;
-
- 输入的token tensor传入transformer模型,计算logits,得到形状为
(batch_size, hidden_size)的logits(transformer最后一层的输出);
- 输入的token tensor传入transformer模型,计算logits,得到形状为
-
- softmax+top_p采样,得到当前预测的token,并更新当前位置,准备预测下一个token;
-
- 解码得到生成的文本。
4. 推理
简单看一下官方example中给出的推理样例prompt:
['The capital of Germany is the city of','Here is my sonnet in the style of Shakespeare about an artificial intelligence:']
生成结果为:
['The capital of Germany is the city of Berlin. The city is also the capital of the Federal Republic of Germany.\nThe city of Berlin is located in the state of Berlin in Germany. The city is the capital of the federal Republic of Germany.\nBerlin has a total population of around 3.4 million and is the 2nd most populous city in the European Union after London. The city has an area of 892 square kilometers and is the 9th most populated city in Europe.\nThe city of Berlin was founded in the 13th century. Berlin was also the capital of the German Empire, the German Democratic Republic and the united Federal Republic of Germany.\nThe city of Berlin has many tourist attractions that include Museumsinsel, Brandenburger Tor, the Reichstag, and the Schloss Charlottenburg.\nThe city of Berlin is a major center for the Arts, Science, Education and Innovation. The city is also the political, economic, and cultural center of Germany.\nBerlin is home to a number of world renowned universities including the Free University of Berlin, the Humboldt University of Berlin, the Technical University of Berlin, and the Berlin Institute of Technology.\nThe city of Berlin has','Here is my sonnet in the style of Shakespeare about an artificial intelligence:\nLet us take a moment from the tumultuous storm\nOf the politics of religion to examine the shape of things.\nOur intuition tells us that whatever we can conceive\nCan exist – our minds have no limit.\nHowever, our senses tell us that there is a limit.\nLet us examine the infinite and what we can say about it.\nThe infinite is something that we can never see.\nWe cannot say what it is and we cannot say what it is not.\nBut, somehow, it is nonetheless real.\nWe can also say that the infinite is eternal –\nIt has no beginning and it has no end.\nThat is what it is – it is the eternal.\nIn a word, it is God.\nBut what about the universe?\nThe universe is a finite construct –\nThe infinitely large and the infinitely small –\nAll of it finite.\nEven the singularity at the end of time is finite.\nSo, the universe is not God.\nPerhaps it is the vessel of God.\nPerhaps, in some sense, the universe is God.\nBut, I am still a man.\nI cannot see the infinite.\nI can only']
总结一下,本文对LLaMA大模型的结构代码进行了详细的介绍,其开源出来的结构代码量并不多,但是其中很多细节值得反复推敲理解。
在后续的工作中,可能会对大模型进行进一步的实验,对此欢迎对此感兴趣的朋友们在下方留言交流。如果本文中出现了不够准确的地方,也欢迎大家在评论区指出。
相关文章:

Meta最新模型LLaMA细节与代码详解
Meta最新模型LLaMA细节与代码详解0. 简介1. 项目环境依赖2. 模型细节2.1 RMS Pre-Norm2.2 SwiGLU激活函数2.3 RoPE旋转位置编码3. 代码解读3.1 tokenizer3.2 model3.2.1 模型细节详解3.2.2 transformer构建3.3 generate4. 推理0. 简介 今天介绍的内容是Facebook Meta AI最新提…...

3/6考试总结
时间安排 7:30–7:50 看题,T1,T2 感觉是同类型的题,直接搜索状态然后 dp 一下,T3 估计是个独角晒。 7:50–8:20 T3,有 n^2 的式子,然后可以优化到 n ,写暴力验证一下发现不对。很迷,反复推了几遍都拍不上暴…...

产品经理必读书单
产品经理必读书单,世界变化那么快,不如静下来读读书。在这个浮躁的时代,能够安静下来读书的人太少了。古人云,“读万卷书,不如行万里路,行万里路不如阅人无数”。很多人别说阅人无数了,上学的时…...
UEFI移植LVGL
自己组装过游戏主机的应该都有看到过,进入BIOS设置,酷炫的界面便呈现在眼前,而很多BIOS,使用的还是标准的界面。现在有个趋势,phoenix和insyde也在慢慢朝这种GUI界面发展,而AMI的使用C编写的界面已经非常完…...
3.8 test命令的用法)
RK356x U-Boot研究所(命令篇)3.8 test命令的用法
平台U-Boot 版本Linux SDK 版本RK356x2017.09v1.2.3文章目录 一、test命令的介绍二、test命令的定义三、test命令的用法一、test命令的介绍 test 命令定义在cmd/test.c,需要使能以下配置: obj-$(CONFIG_HUSH_PARSER) += test.o以下介绍摘自cmd/Kconfig: config HUSH_PARS…...
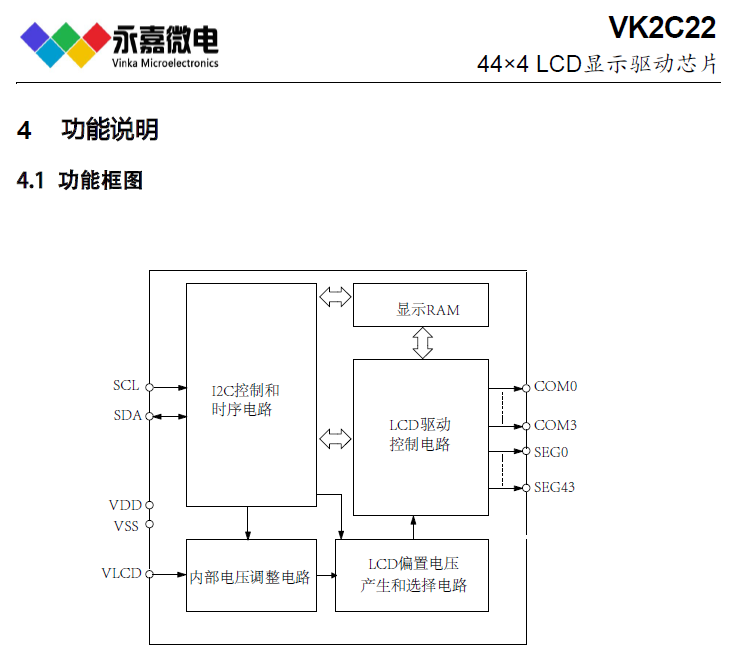
LCD液晶段码驱动IC/LCD液晶驱动芯片VK2C22高抗干扰/抗噪,适用于汽车仪表/单相智能电表
产品型号:VK2C22A/B产品品牌:永嘉微电/VINKA封装形式:LQFP52/48、DICE(COB邦定片)、COG(邦定玻璃用)产品年份:新年份原厂,工程服务,技术支持!VK2C22A/B概述:VK2C22是一个点阵式存储映…...
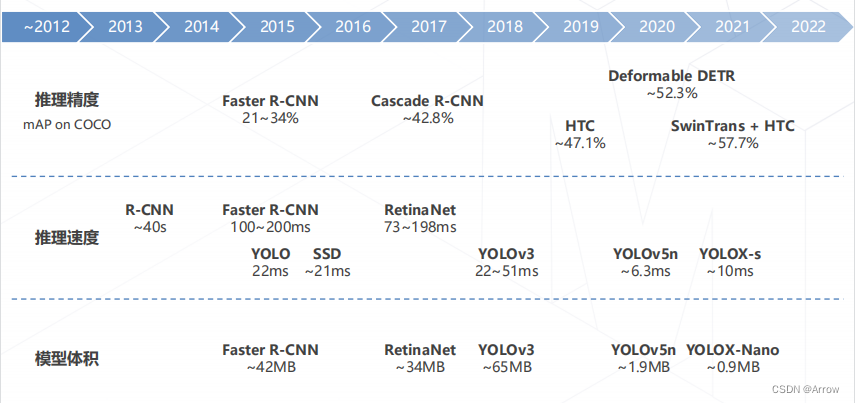
OpenMMLab 目标检测
OpenMMLab 目标检测1. 目标检测简介1.1 滑窗2. 基础知识2.1 边界框(Bounding Box)3. 两阶段目标检测算法3.1 多尺度检测技术4. 单阶段目标检测算法4.1 YOLO: You Only Look Once (2015)4.2 SSD: Single Shot MultiBox Detetor (2016)5. 无锚框目标检测算…...

Jenkins部署angular11自动打包
可能年纪大了,对于新东西的学习和接收有点慢,花了差不多一周的时间,终于把jenkins配置好了,可以自动打包,与手动打出来的一样,以后就解放双手了。#!/bin/bashnpm cache clean -fnpm -vnode -vnpm install n…...

【状态管理】zustand 中文文档,它来了!!!
如果有兴趣了解更多用法及 api ,点击此处解锁中文文档 前言 是不是觉得 Redux 很难用?想用 Context 代替,但是你知道吗,Context 也有个很大的缺点: context value发生变化时,所有用到这个context的组件都…...

【时序】特征工程-时间序列特征构造
数据和特征决定了机器学习的上限,而模型和算法只是逼近这个上限而已。由此可见,特征工程在机器学习中占有相当重要的地位。在实际应用当中,可以说特征工程是机器学习成功的关键。 特征工程是什么? 特征工程是利用数据领域的相关知识来创建能够使机器学习算法达到最佳性能的…...
)
【独家】华为OD机试 - 环中最长子串(C 语言解题)
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明本期…...
JavaScript新手学习手册-基础代码(一)
什么是JavaScript? 百度百科 什么是控制台? 网页➡快捷键F12 进入Console就是控制台,它的作用与开发软件相同,可以进行代码的编写在紫色位置进行编写,另外console.log()方法所打印的内容都是在此进行输出。 一&#…...
Firewall App Blocker v1.7 防火墙管理设置工具多语言版
Firewall App Blocker 是一款由 BlueLife 与 Velociraptor 开发的免费且功能强大的防火墙设置软件。在 Windows 操作系统中,您可以使用 Windows 防火墙来阻止或解除阻止某些应用程序的联网,然而微软并没有为 Windows 防火墙提供一个易于使用的界面,来让用户使用其强大的功能…...

windows常用
方式1 ctrlaltdelete 可以进入管理内存 服务 查询在运行的端口 可以图形化结束端口进程 方式2 netstat -ano|findstr "端口号" taskkill -PID 进程端口号(最后一列) -F netstat -ano|findstr taskkill -PID -F 1.calc:启…...
从源码的角度告诉你 spark是怎样完成对文件切片
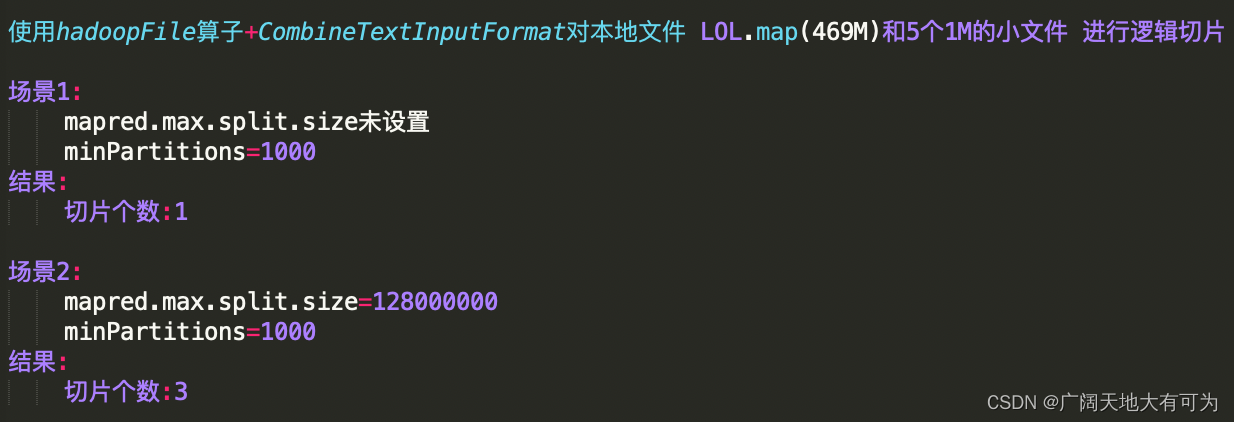
目录 1.说明 2.怎样设置默认切片数 2.1 RDD默认切片设置 2.2 SparkSQL默认切片设置 3. makeRDD 切片原理 4. textFile 切片原理 4.1 切片规则 4.2 怎样设置切片大小 4.3 测试代码 5.hadoopFile 切片原理 5.1 说明 5.2 切片规则 5.3 怎样设置切片大小 5.4 代码测试…...

剑指 Offer II 019. 最多删除一个字符得到回文
题目链接 剑指 Offer II 019. 最多删除一个字符得到回文 easy 题目描述 给定一个非空字符串 s,请判断如果 最多 从字符串中删除一个字符能否得到一个回文字符串。 示例 1: 输入: s “aba” 输出: true 示例 2: 输入: s “abca” 输出: true 解释: 可以删除 “c”…...

RK3568驱动OV13850摄像头模组调试过程
摄像头介绍品牌:Omnivision型号:CMK-OV13850接口:MIPI像素:1320WOV13850彩色图像传感器是一款低电压、高性能1/3.06英寸1320万像素CMOS图像传感器,使用OmniBSI?技术提供了单-1320万像素(42243136)摄像头的…...
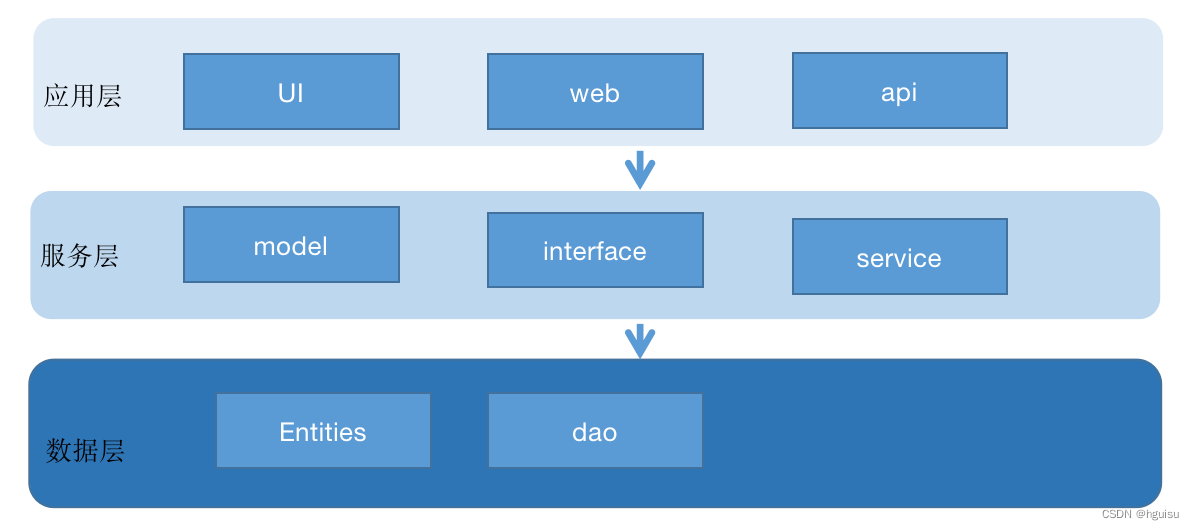
Go项目的目录结构基本布局
前言 随着项目的代码量在不断地增长,不同的开发人员按自己意愿随意布局和创建目录结构,项目维护性就很差,代码也非常凌乱。良好的目录与文件结构十分重要,尤其是团队合作的时候,良好的目录与文件结构可以减少很多不必要…...
CHAPTER 1 Linux Filesystem Management
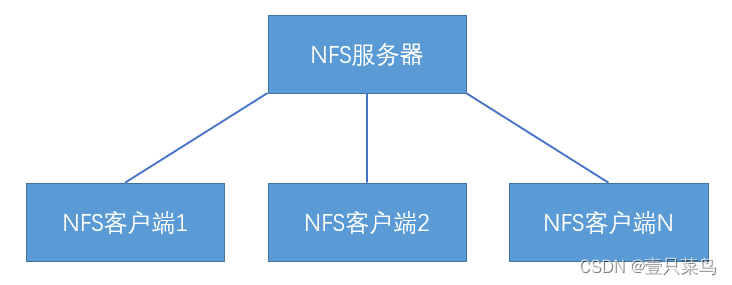
Linux Filesystem Management1 文件系统是什么2 文件系统的组成3 inode详解1. inode到底是什么2. inode的内容3. inode的大小4. inode的号码5. 硬链接6. 软链接4 存储区域5 常见文件系统的类型1. 根文件系统2. 虚拟文件系统3. 真文件系统4. 伪文件系统5. 网络文件系统1 文件系统…...

RocketMQ架构篇 - 读写队列与生产者如何选择队列
读、写队列 创建主题时,可以指定 writeQueueNums(写队列的个数)、readQueueNums(读队列的个数)。生产者发送消息时,使用写队列的个数返回路由信息;消费者消费消息时,使用读队列的个…...

智慧医疗能源事业线深度画像分析(上)
引言 医疗行业作为现代社会的关键基础设施,其能源消耗与环境影响正日益受到关注。随着全球"双碳"目标的推进和可持续发展理念的深入,智慧医疗能源事业线应运而生,致力于通过创新技术与管理方案,重构医疗领域的能源使用模式。这一事业线融合了能源管理、可持续发…...

基于服务器使用 apt 安装、配置 Nginx
🧾 一、查看可安装的 Nginx 版本 首先,你可以运行以下命令查看可用版本: apt-cache madison nginx-core输出示例: nginx-core | 1.18.0-6ubuntu14.6 | http://archive.ubuntu.com/ubuntu focal-updates/main amd64 Packages ng…...

【SQL学习笔记1】增删改查+多表连接全解析(内附SQL免费在线练习工具)
可以使用Sqliteviz这个网站免费编写sql语句,它能够让用户直接在浏览器内练习SQL的语法,不需要安装任何软件。 链接如下: sqliteviz 注意: 在转写SQL语法时,关键字之间有一个特定的顺序,这个顺序会影响到…...

Java-41 深入浅出 Spring - 声明式事务的支持 事务配置 XML模式 XML+注解模式
点一下关注吧!!!非常感谢!!持续更新!!! 🚀 AI篇持续更新中!(长期更新) 目前2025年06月05日更新到: AI炼丹日志-28 - Aud…...
)
【服务器压力测试】本地PC电脑作为服务器运行时出现卡顿和资源紧张(Windows/Linux)
要让本地PC电脑作为服务器运行时出现卡顿和资源紧张的情况,可以通过以下几种方式模拟或触发: 1. 增加CPU负载 运行大量计算密集型任务,例如: 使用多线程循环执行复杂计算(如数学运算、加密解密等)。运行图…...
OPenCV CUDA模块图像处理-----对图像执行 均值漂移滤波(Mean Shift Filtering)函数meanShiftFiltering()
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 在 GPU 上对图像执行 均值漂移滤波(Mean Shift Filtering),用于图像分割或平滑处理。 该函数将输入图像中的…...
GC1808高性能24位立体声音频ADC芯片解析
1. 芯片概述 GC1808是一款24位立体声音频模数转换器(ADC),支持8kHz~96kHz采样率,集成Δ-Σ调制器、数字抗混叠滤波器和高通滤波器,适用于高保真音频采集场景。 2. 核心特性 高精度:24位分辨率,…...

算法笔记2
1.字符串拼接最好用StringBuilder,不用String 2.创建List<>类型的数组并创建内存 List arr[] new ArrayList[26]; Arrays.setAll(arr, i -> new ArrayList<>()); 3.去掉首尾空格...

AGain DB和倍数增益的关系
我在设置一款索尼CMOS芯片时,Again增益0db变化为6DB,画面的变化只有2倍DN的增益,比如10变为20。 这与dB和线性增益的关系以及传感器处理流程有关。以下是具体原因分析: 1. dB与线性增益的换算关系 6dB对应的理论线性增益应为&…...

08. C#入门系列【类的基本概念】:开启编程世界的奇妙冒险
C#入门系列【类的基本概念】:开启编程世界的奇妙冒险 嘿,各位编程小白探险家!欢迎来到 C# 的奇幻大陆!今天咱们要深入探索这片大陆上至关重要的 “建筑”—— 类!别害怕,跟着我,保准让你轻松搞…...