滑模控制(Sliding mode control)快速入门
0. 简介
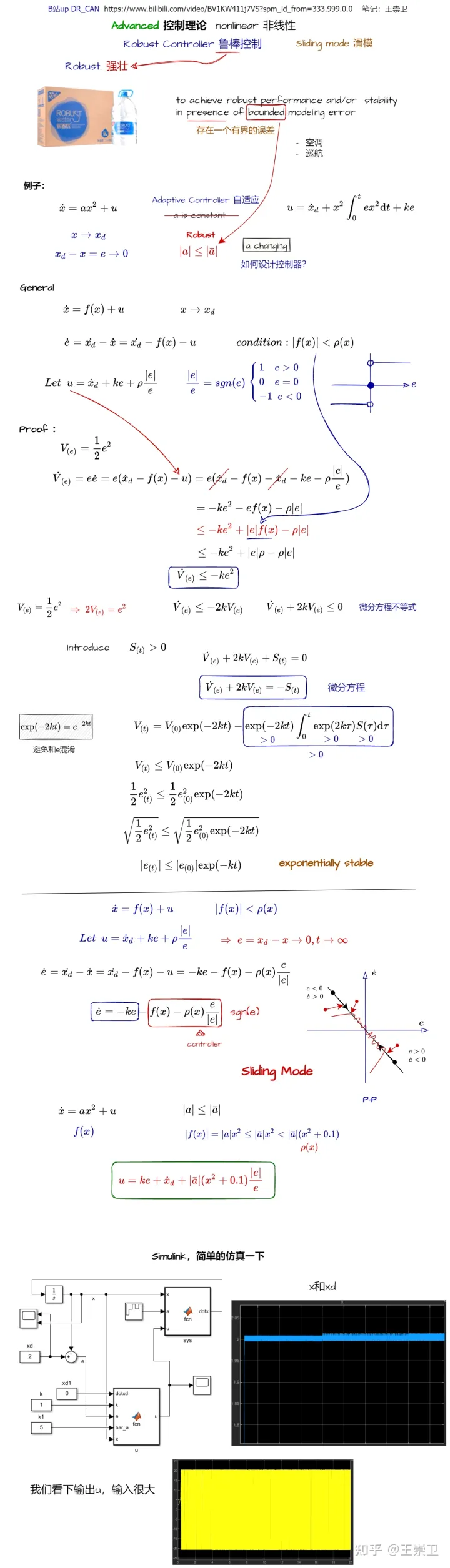
最近作者受到邀请,让我帮忙给刚入门的学弟讲讲滑模控制。可是作者也不知道怎么向未入门的学弟讲解这些基础知识,所以作者翻了翻近几年写的很好的文章以及视频。综合起来,来总结出一套比较基础,且适用于初学者的文章吧。这里我们先贴一下王崇卫同学的笔记。
对应的视频连接在下面:
【Advanced控制理论】17
1. 滑模控制目的
对于滑模控制而言,我觉得我们先要明白其目的再来学习。一开始我们对滑动控制的定义是:滑动模式是先使用受控系统产生两个以上的子系统,然后再刻意加入一些切换条件产生滑动模式,以达成控制目标的一种技术。
滑模控制(sliding mode control, SMC)也叫变结构控制,其本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。
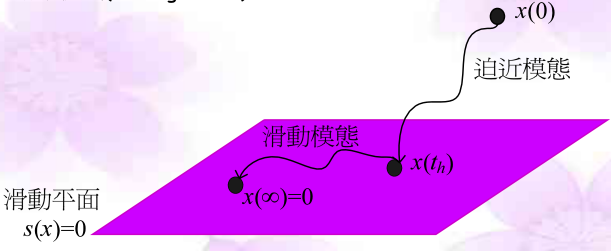
例如滑动模式控制中存在滑动曲面s=0s=0s=0,一开始时,系统会在有限时间内到达滑动曲面,之后就会沿着滑动曲面移动。在滑动模式的理论叙述中,系统会约束在滑动曲面上,因此只需将系统视为在滑动曲面上滑动。不过实际系统的实现是用高频切换来让系统近似在滑动曲面上滑动,高频切换的控制信号让系统在很邻近滑动曲面的范围内切跳(chatter),而且其频率是不固定的。虽然整体系统是非线性的,不过下图中,当系统到达滑动曲面后,理想(没有切跳)系统会限制在s=0s=0s=0的滑动曲面上,滑动曲面是线性时不变系统,在原点处指数稳定。
2. 滑模控制优缺点
2.1 滑模控制的优点:
滑动模态可以设计且与对象参数和扰动无关,具有快速响应、对参数变化和扰动不灵敏( 鲁棒性)、无须系统在线辨识、物理实现简单。
2.2 滑模控制的缺点:
当状态轨迹到达滑动模态面后,难以严格沿着滑动模态面向平衡点滑动,而是在其两侧来回穿越地趋近平衡点,从而产生抖振——滑模控制实际应用中的主要障碍。国内外主要通过改进滑模趋近律达到减弱抖振的目的。
3. 滑模控制需要条件
上文讲到滑模变结构控制器设计也包括两部分,一是能从状态空间的任何位置有限时间到达滑模面 s=0s = 0s=0,二是在滑模面上可以收敛到原点(平衡点)。这也就代表我们要存在有一个稳定的滑模面,且该滑模面是可达的。为此有以下四个条件:
- 稳定性条件:在s=0的滑模面上,状态是收敛的,即滑动模态存在;
- 可达性条件:在切换面s=0以外的运动点将于有限时间内到达切换面;
- 保证滑模运动的稳定性;
- 达到控制系统运动品质要求。
下面将按照四个条件来叙述如何设计滑模控制的控制器,这里的部分内容借鉴了文章滑动模型控制(Sliding Mode Control),并结合作者的理解进行写作。
3.1 被控系统的滑模面生成
首先第一步就是我们需要明白,我们需要找到一个滑模面来让被控系统在滑模面上维持稳定。
例如假设存在一个被控系统:
x˙1=x2x˙2=u\begin{aligned} \dot{x}_1 &= x_2 \\ \dot{x}_2 &= u \end{aligned}x˙1x˙2=x2=u
这个时候我们就需要根据被控系统设计一个滑模面,滑模面一般可以设计为如下的形式
s(x)=∑i=1n−1cixi+xns(x) = \sum_{i=1}^{n-1} c_i x_i + x_ns(x)=i=1∑n−1cixi+xn
因为在滑模控制中,要保证多项式pn−1+cnpn−2+⋯+c2p+c1p^{n − 1} + c_n p^{n − 2} + \cdots + c_2 p + c_1pn−1+cnpn−2+⋯+c2p+c1为Hurwitz (简单来说这条条件是为了满足状态在s=0s=0s=0的滑模面上可以收敛)。
什么是Hurwitz,即上述多项式的特征值的实数部分在左半平面,即为负。
我们可以看到上述的被控系统是存在有两个变量,所以需要取n=2n=2n=2,即 s(x)=c1x1+x2s ( x ) = c_1 x_1 + x_2s(x)=c1x1+x2,为了保证多项式 p+c1p+c_1p+c1为Hurwitz,需要多项式p+c1=0p+c_1=0p+c1=0的特征值实数部分为负,即c1>0c_1>0c1>0。
我们知道滑模控制需要使得状态x1x_1x1 和x2x_2x2的导数均达到零,我们令 s=0s=0s=0,分析一下结果有
{cx1+x2=0x˙1=x2⇒cx1+x˙1=0⇒{x1(t)=e−ctx1(0)x2(t)=x˙1(t)=−cx1(0)e−ct\left\{\begin{aligned} &cx_1 + x_2 = 0 \\ &\dot{x}_1 = x_2 \end{aligned}\right. ~~ \Rightarrow ~~ c x_1 + \dot{x}_1 = 0 ~~ \Rightarrow ~~ \left\{\begin{aligned} &x_1(t) = \text{e}^{-ct} x_1(0) \\ &x_2(t) = \dot{x}_1(t) = -c x_1(0) \text{e}^{-ct} \end{aligned}\right.{cx1+x2=0x˙1=x2 ⇒ cx1+x˙1=0 ⇒ {x1(t)=e−ctx1(0)x2(t)=x˙1(t)=−cx1(0)e−ct
通过上式可以看到状态x1x_1x1 和 x2x_2x2 最终都是趋向于零的,而且速度是以指数速率趋紧的。指数速率意味着当t=1/ct=1/ct=1/c时,趋零过程完成63.2%63.2\%63.2%,当t=3/ct=3/ct=3/c时,趋零过程完成 95.021%95.021\%95.021%。那么我们通过调节参数ccc的大小即可实现对趋零速度的调节,ccc 越大,速度越快。
因此如果满足了 s=cx1+x2=0s=cx_1 + x_2=0s=cx1+x2=0,那么系统的状态x1x_1x1 和x2x_2x2也将沿着滑模面趋近于零 (s=0s=0s=0称之为滑模面)。
3.2 可达性控制器设计
在拿到滑模面后则证明被控系统的稳定性条件成立,下面一步就是可达性条件,即状态xxx 从状态空间中任意一点出发,可以在有限时间到达 s=0s=0s=0 的滑模面上,此时我们可以采用李雅普诺夫间接法来分析,从前面可知,切换函数 sss 是状态变量 xxx 的函数,取以下的李雅普诺夫函数
V=12s2V = \frac{1}{2} s^2V=21s2
对时间求导可得
V˙=ss˙=s(−sgn(s)−s)=−sgn(s)s−s2=−(∣s∣+s2)<0\begin{aligned} \dot{V} &= s \dot{s} \\ &= s (-\text{sgn}(s) - s) \\ &= -\text{sgn}(s) s - s^2 \\ &= -(|s| + s^2) < 0 \end{aligned}V˙=ss˙=s(−sgn(s)−s)=−sgn(s)s−s2=−(∣s∣+s2)<0
为了使系统稳定,我们需要使V˙<0\dot{V}<0V˙<0,即 ss˙<0s \dot{s}<0ss˙<0。此时系统对于 sss而言是渐进稳定,不能保证其有限时间到s=0s=0s=0 的滑模面上(渐进稳定是当 ttt趋于无穷时,状态变量 xxx 趋于 000,即无限时间到达),因此需要 ss˙<−σs \dot{s}<-\sigmass˙<−σ,σ\sigmaσ是一个极小的正数。以上就是可达性条件成立的必要依据\color{red}{以上就是可达性条件成立的必要依据}以上就是可达性条件成立的必要依据。
但是实际上每次设计总不能都用李雅普诺夫函数判断,于是人们就提出了趋近律这一概念,常用的趋近律有如下几种,其中sgn(s)\text{sgn}(s)sgn(s) 是符号函数, s>0,sgn(s)=1;s<0,sgn(s)=−1;s=0,sgn(s)=0s>0,\text{sgn}(s)=1; s<0, \text{sgn}(s)=-1; s=0, \text{sgn}(s)=0s>0,sgn(s)=1;s<0,sgn(s)=−1;s=0,sgn(s)=0:
-
等速趋近律: s˙=−ϵsgn(s),ϵ>0\dot{s} = -\epsilon ~\text{sgn}(s), ~~~~\epsilon > 0s˙=−ϵ sgn(s), ϵ>0
-
指数趋近律:s˙=−ϵsgn(s)−ks,ϵ>0,k>0\dot{s} = -\epsilon ~\text{sgn}(s) - k s, ~~~~\epsilon > 0, k>0s˙=−ϵ sgn(s)−ks, ϵ>0,k>0
-
幂次趋近律: s˙=−k∣s∣αsgn(s)−ks,k>0,0<α<1\dot{s} = -k |s|^\alpha ~\text{sgn}(s) - k s, ~~~~k>0, 0<\alpha<1s˙=−k∣s∣α sgn(s)−ks, k>0,0<α<1
一般在使用时候我们需要完成这些参数的调整,一般我们使用的是指数趋近率,并将ϵ\epsilonϵ和kkk的值均设为1,简化为:
s˙=sgn(s)−s\dot{s} = ~\text{sgn}(s) - ss˙= sgn(s)−s
然后我们可知s(x)=c1x1+x2s ( x ) = c_1 x_1 + x_2s(x)=c1x1+x2,则s˙=sgn(s)−s=c1x1˙+x2˙=c1x2+u\dot{s} = ~\text{sgn}(s) - s = c_1 \dot{x_1} + \dot{x_2} = c_1x_2+us˙= sgn(s)−s=c1x1˙+x2˙=c1x2+u。则我们可以得到控制器uuu为:
u=sgn(s)−s−c1x2u = ~\text{sgn}(s) - s - c_1x_2u= sgn(s)−s−c1x2
这就得到了我们必要的两个条件即,存在滑模面sss以及可达性控制器uuu.
4. 滑模控制Python代码
下面是最简单的python代码
…详情请参照古月居
相关文章:
滑模控制(Sliding mode control)快速入门
0. 简介 最近作者受到邀请,让我帮忙给刚入门的学弟讲讲滑模控制。可是作者也不知道怎么向未入门的学弟讲解这些基础知识,所以作者翻了翻近几年写的很好的文章以及视频。综合起来,来总结出一套比较基础,且适用于初学者的文章吧。这…...
golang的垃圾回收详解
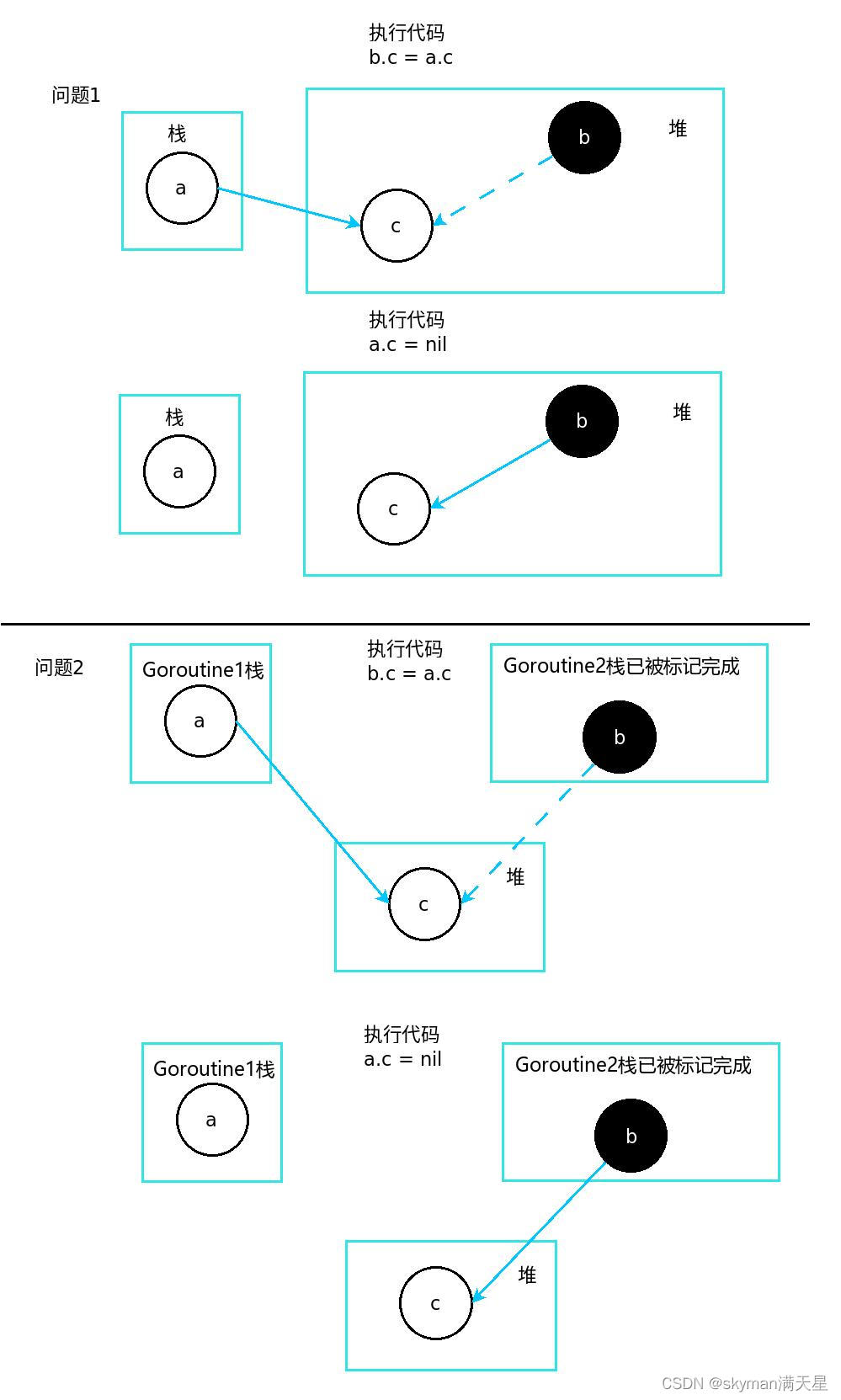
golang的垃圾回收详解 一、三色标记法 作为一门现代化的语言,golang与java一样,都在语言中内置了垃圾回收的功能,不需要程序员自己去回收堆内存。而垃圾回收中,最重要的两个部分就是垃圾检测算法以及垃圾回收算法。垃圾检测算法决…...
线上负载过高排查(top/vmstat/ifstat/free/df)
目录 一、五大命令 二、故障排查步骤 1、top命令找出CPU占比最高的 2、ps -ef 或者 jps -l进一步定位 3、ps -mp位到具体线程或者代码 4、jstack精准定位到错误的地方 本文通过学习:周阳老师-尚硅谷Java大厂面试题第二季 总结的LinuxJDK命令操作相关的笔记 一…...
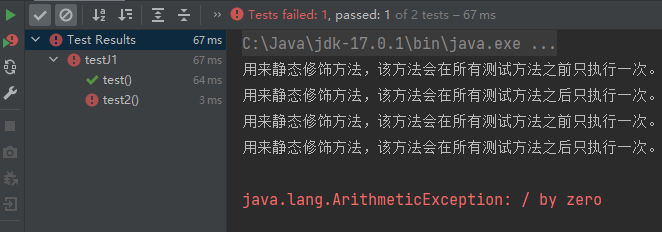
Java的注解(Annotation)
Java 注解(Annotation)又称 Java 标注,是 JDK5.0 引入的一种注释机制。Java 中的类、构造器、方法、成员变量、参数等都可以被注解进行标注。例如JUnit单元测试中的Test方法,可以使得方法直接运行。JUnit单元测试Test单元测试是针…...

信息系统项目管理师:配置管理
配置管理指的是在一个系统或软件中对配置项的管理,包括对配置项的定义、存储、跟踪和修改等一系列活动。配置项可以是硬件设备、软件组件、系统设置、网络配置等,配置管理旨在确保在不同时间点或环境下系统或软件的配置项的正确性和一致性。通过配置管理…...
web餐饮开源程序
简介 一款专门针对餐饮行业而开发桌面应用程序 技术 借助Panuon.UI.Silver控件库,开发的一款餐饮软件。 运行环境:.NETFramework,Versionv4.8。 运行数据库:MySql。 ORM框架:SqlSugar。 第三方插件:Panuon.UI.Silv…...
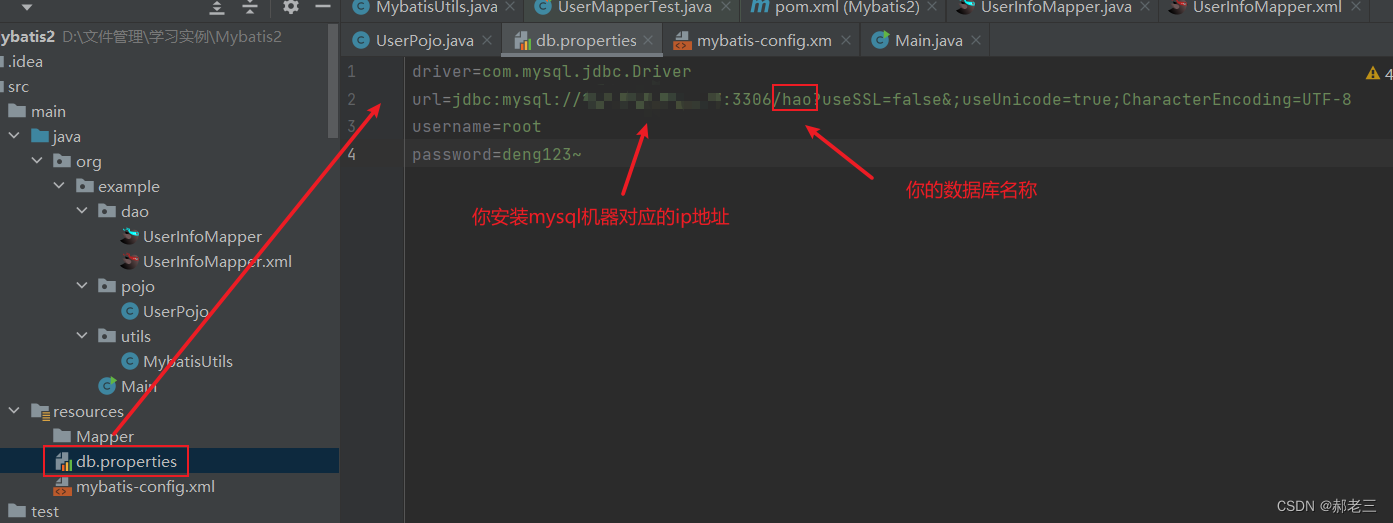
28个案例问题分析---027---单表的11个Update接口--MyBatis
一:背景介绍 项目开发中。我们使用的是MyBatis,在MyBatis的xml文件里,两个表的更新功能,写了足足11个更新接口,毫无复用的思想 这种方式可以正常的实现功能,但是没有复用,无论是从时间上还是维…...

大数据开发治理平台 DataWorks
序言学习下阿里DataWorks的设计理念以及要做的事情cuiyaonan2000163.com参考文档:https://www.aliyun.com/product/bigdata/idehttps://help.aliyun.com/document_detail/73015.htmlhttps://help.aliyun.com/document_detail/324149.html ----数据治理LaunchDataWorks基于阿里云…...

Xshell的下载、使用、配置【ssh、telnet、串口】
目录 一、概述 二、Xshell的使用 2.1 Xshell使用ssh协议远程连接Linux主机或服务器 2.2 Xshell使用telnet协议远程连接Linux开发板 2.3 Xshell使用SERIAL协议远程连接Linux开发板 三、Xshell常用配置 3.1 配置默认会话属性 一、概述 Xshell是由NetSarang公司开发的强大…...
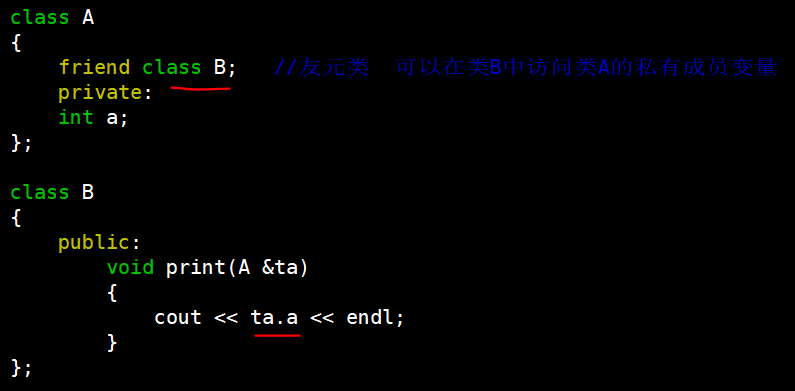
C++回顾(七)—— 面向对象模型
7.1 静态成员变量和静态成员函数 7.1.1 静态成员变量 关键字 static 可以用于说明一个类的成员;静态成员提供了一个同类对象的共享机制;把一个类的成员说明为 static 时,这个类无论有多少个对象被创建,这些对象共享这个 static …...

开源监控服务uptime-kuma
好久没写文章了,刚好最近用了一个开源的监控服务,感觉蛮有意思的,记录一下 (一)安装 uptime-kuma安装方式有几种,这里当然是选择大家都爱的docker,一条命令搞定 docker run -d --restartalways -p 3001:…...

JavaScript混淆技术:了解其核心原理和常用手段
当今互联网时代,JavaScript已经成为了web前端开发的重点技术之一。其中,JavaScript代码的安全性问题一直是关注的焦点。为了保护JavaScript代码的安全性,很多人对其进行加密处理,众所周知,对于单纯的加密算法ÿ…...

大型医院云HIS系统:采用前后端分离架构,前端由Angular语言、JavaScript开发;后端使用Java语言开发 融合B/S版电子病历系统
一套医院云his系统源码 采用前后端分离架构,前端由Angular语言、JavaScript开发;后端使用Java语言开发。融合B/S版电子病历系统,支持电子病历四级,HIS与电子病历系统均拥有自主知识产权。 文末卡片获取联系! 基于云计…...
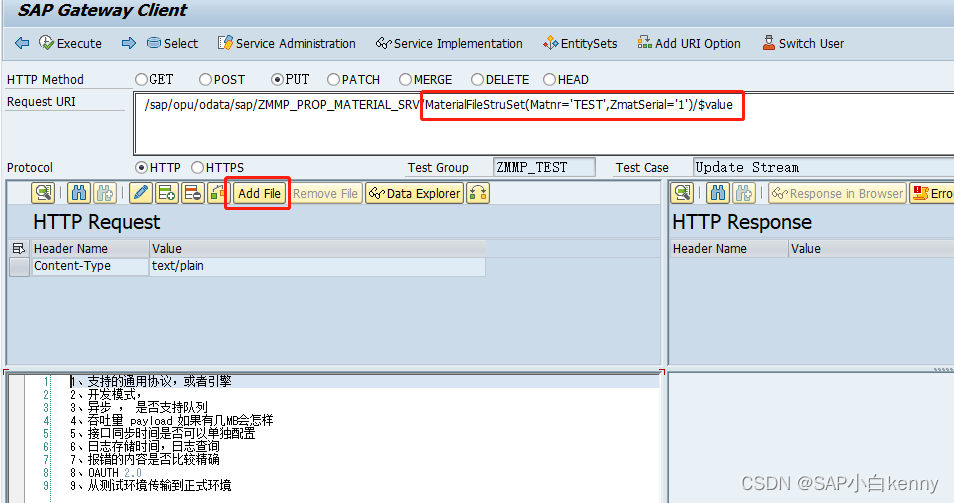
SAP UI5 Upload/Download file through NetWeaver Gateway
1、创建 SEGW对象 2、创建Entity Type 要把Media 标识打上 3、 激活对象然后到DPC Class的扩展对象里面重定义 /IWBEP/IF_MGW_APPL_SRV_RUNTIME~GET_STREAM /IWBEP/IF_MGW_APPL_SRV_RUNTIME~CREATE_STREAM /IWBEP/IF_MGW_APPL_SRV_RUNTIME~UPDATE_STREAM METHOD /iwbep/if_m…...
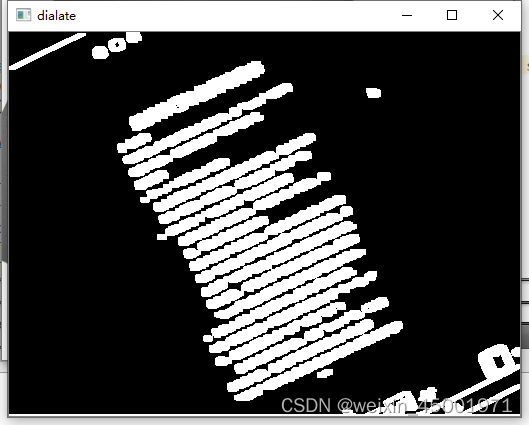
opencv校正图像
目录1、前言2、例程2.1、代码2.2、效果口罩说明书网页3、按步骤分析转灰度图降噪 Canny边缘检测膨胀(可视具体情况省略)轮廓检索选取角度1、前言 我们用相机拍照时,会因为角度问题造成拍歪,会影响图像的识别,这时就需…...

JavaScript:函数与箭头函数的区别
ref 1. 定义 函数 function getName() {}箭头函数 const getName () > {}2. 命名 函数分为匿名、具名。 function getName() {} let getName function () {}箭头函数只有匿名。 const getName () > {}3. 构造函数 箭头函数都是匿名函数,所以不能作为构造…...
)
八股文(四)
目录 一、 Vue2的双向数据绑定原理 二、 vue2数据绑定缺点是什么?vue3是怎么解决的? (1)因为vue2.0 object.defineProperty只能劫持对象属性 (2)Proxy是直接代理对象 (3)proxy不…...
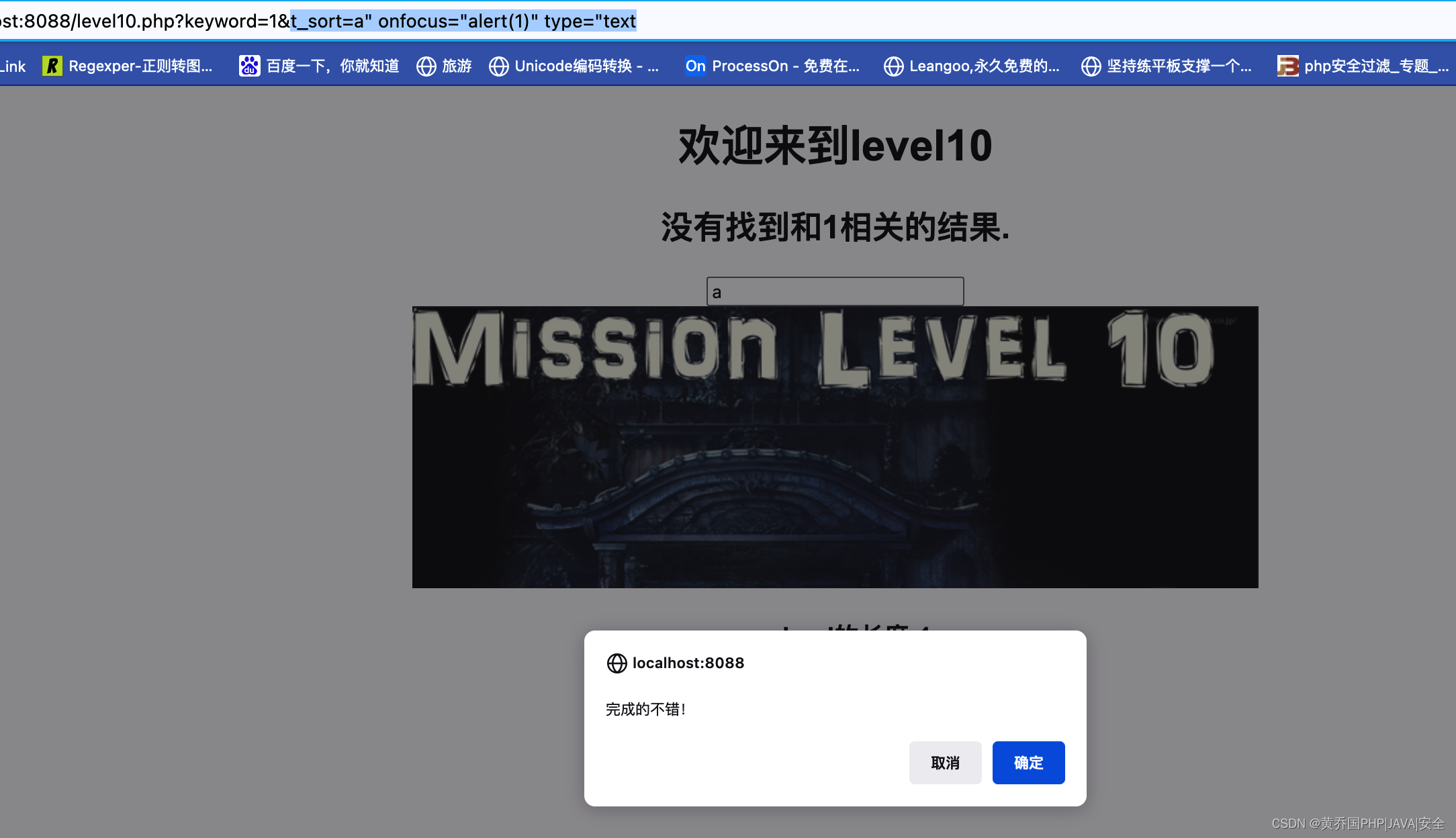
XSS挑战赛(xsslabs)1~10关通关解析
简介 XSS挑战赛,里面包含了各种XSS的防御方式和绕过方式,好好掌握里面的绕过细节,有助于我们更好的去发现XSS漏洞以及XSS的防御。本文更多的是分享解析的细节,不是一个标准的答案,希望大家在渗透的时候有更多的思维。…...
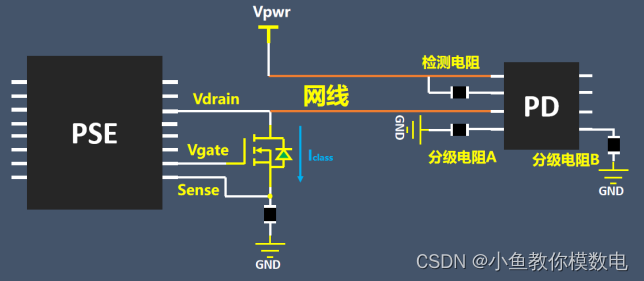
什么是以太网供电POE
POE指的是以太网供电,就是一根网线在传输网络的同时还传输设备所需的电源。我们最常见的就是通过POE交换机连接网络摄像头,网络摄像头无需的电源适配器,仅靠一根网线就能实现电源和网络的传输。POE供电一般可以到100米。POE包含两个部分&…...
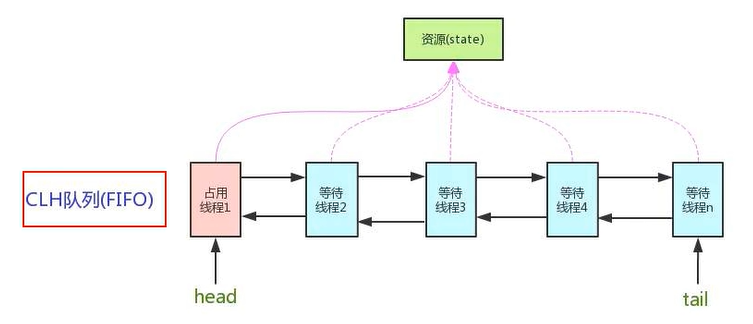
【JUC2022】第七章 AQS、ReentrantReadWriteLock 和 StampedLock
【JUC2022】第七章 AQS 文章目录【JUC2022】第七章 AQS一、AQS1.概述2.同步器3.抽象的4.队列式二、ReentrantReadWriteLock1.概述2.案例3.存在的问题三、StampedLock1.概述2.案例3.存在的问题一、AQS 1.概述 AQS(AbstractQueueSynchronizer,抽象的队列式同步器)&am…...

pam_env.so模块配置解析
在PAM(Pluggable Authentication Modules)配置中, /etc/pam.d/su 文件相关配置含义如下: 配置解析 auth required pam_env.so1. 字段分解 字段值说明模块类型auth认证类模块,负责验证用户身份&am…...
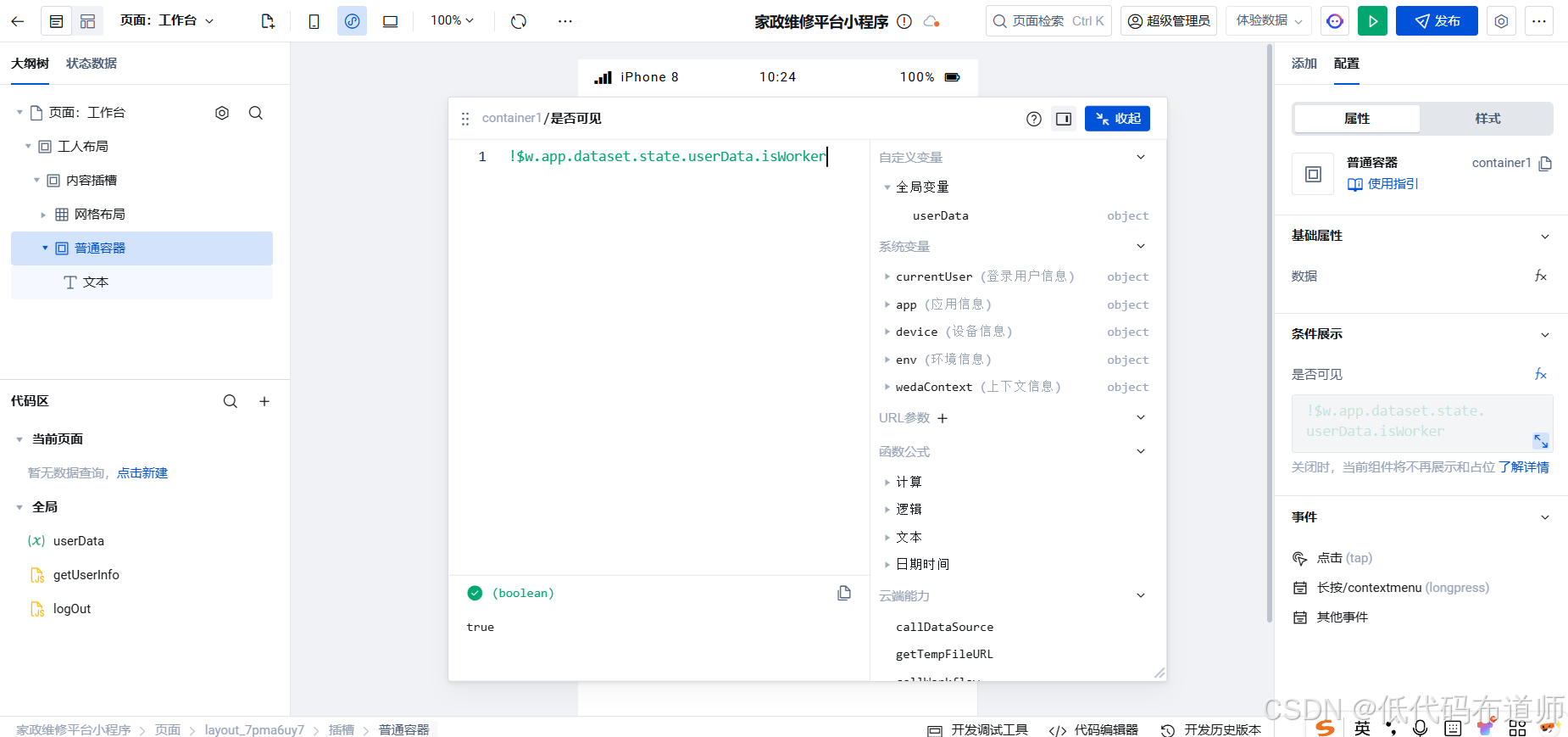
家政维修平台实战20:权限设计
目录 1 获取工人信息2 搭建工人入口3 权限判断总结 目前我们已经搭建好了基础的用户体系,主要是分成几个表,用户表我们是记录用户的基础信息,包括手机、昵称、头像。而工人和员工各有各的表。那么就有一个问题,不同的角色…...

Qt Http Server模块功能及架构
Qt Http Server 是 Qt 6.0 中引入的一个新模块,它提供了一个轻量级的 HTTP 服务器实现,主要用于构建基于 HTTP 的应用程序和服务。 功能介绍: 主要功能 HTTP服务器功能: 支持 HTTP/1.1 协议 简单的请求/响应处理模型 支持 GET…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(一)
宇树机器人多姿态起立控制强化学习框架论文解析 论文解读:交大&港大&上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(一) 论文解读:交大&港大&上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化…...
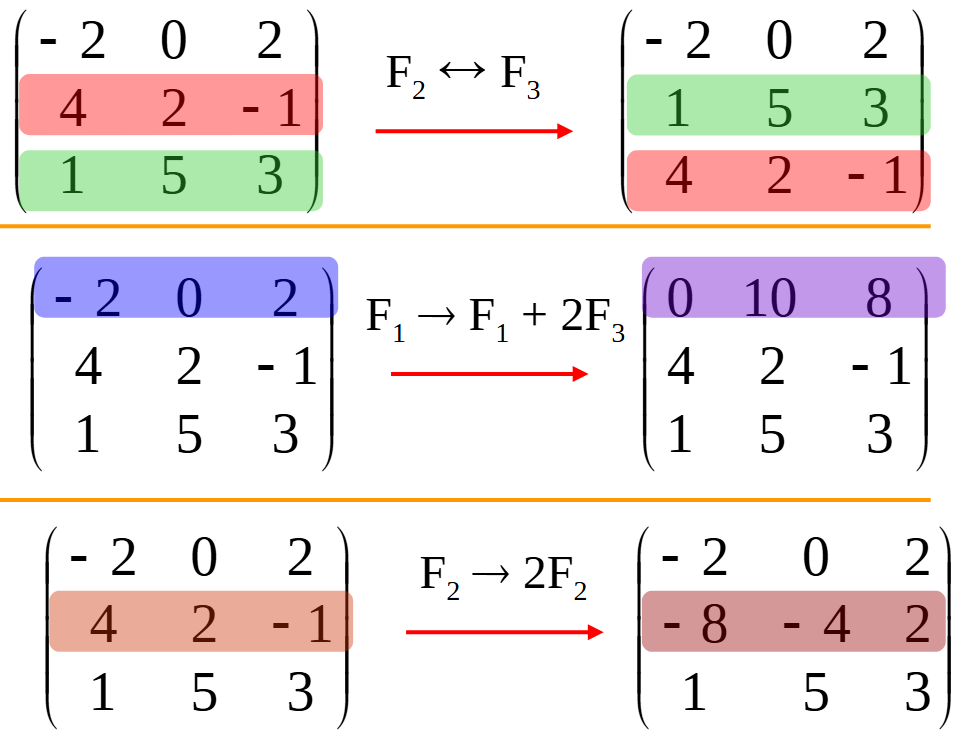
使用 SymPy 进行向量和矩阵的高级操作
在科学计算和工程领域,向量和矩阵操作是解决问题的核心技能之一。Python 的 SymPy 库提供了强大的符号计算功能,能够高效地处理向量和矩阵的各种操作。本文将深入探讨如何使用 SymPy 进行向量和矩阵的创建、合并以及维度拓展等操作,并通过具体…...
嵌入式学习笔记DAY33(网络编程——TCP)
一、网络架构 C/S (client/server 客户端/服务器):由客户端和服务器端两个部分组成。客户端通常是用户使用的应用程序,负责提供用户界面和交互逻辑 ,接收用户输入,向服务器发送请求,并展示服务…...
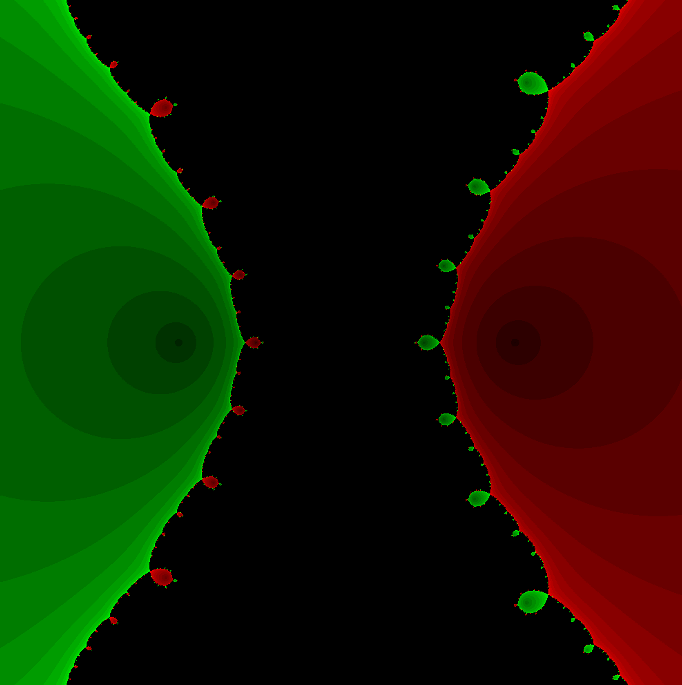
在Mathematica中实现Newton-Raphson迭代的收敛时间算法(一般三次多项式)
考察一般的三次多项式,以r为参数: p[z_, r_] : z^3 (r - 1) z - r; roots[r_] : z /. Solve[p[z, r] 0, z]; 此多项式的根为: 尽管看起来这个多项式是特殊的,其实一般的三次多项式都是可以通过线性变换化为这个形式…...
宇树科技,改名了!
提到国内具身智能和机器人领域的代表企业,那宇树科技(Unitree)必须名列其榜。 最近,宇树科技的一项新变动消息在业界引发了不少关注和讨论,即: 宇树向其合作伙伴发布了一封公司名称变更函称,因…...

关于uniapp展示PDF的解决方案
在 UniApp 的 H5 环境中使用 pdf-vue3 组件可以实现完整的 PDF 预览功能。以下是详细实现步骤和注意事项: 一、安装依赖 安装 pdf-vue3 和 PDF.js 核心库: npm install pdf-vue3 pdfjs-dist二、基本使用示例 <template><view class"con…...

什么是VR全景技术
VR全景技术,全称为虚拟现实全景技术,是通过计算机图像模拟生成三维空间中的虚拟世界,使用户能够在该虚拟世界中进行全方位、无死角的观察和交互的技术。VR全景技术模拟人在真实空间中的视觉体验,结合图文、3D、音视频等多媒体元素…...