[ROS 系列学习教程] rosbag Python API
ROS 系列学习教程(总目录)
本文目录
- 1. 构造函数与关闭文件
- 2. 属性值
- 3. 写bag文件内容
- 4. 读bag文件内容
- 5. 将bag文件缓存写入磁盘
- 6. 重建 bag 文件索引
- 7. 获取bag文件的压缩信息
- 8. 获取bag文件的消息数量
- 9. 获取bag文件记录的起止时间
- 10. 获取话题信息与消息类型
rosbag 的 Python API 主要位于 rosbag 包的 Bag 类中,通过 import rosbag 导入。
Bag 类中的常用接口如下:
1. 构造函数与关闭文件
class Bag(f: Any,mode: str = 'r',compression: str = Compression.NONE,chunk_threshold: int = 768 * 1024,allow_unindexed: bool = False,options: Any | None = None,skip_index: bool = False
)class Compression:NONE = 'none'BZ2 = 'bz2'LZ4 = 'lz4'close(self)
其中,
-
f:bag文件 -
mode:文件操作模式(r, w, a) -
compression:文件压缩模式,见如上Compression,默认Compression.NONE -
chunk_threshold:Bag 文件中每个块的最大字节数,默认768 * 1024 -
allow_unindexed:是否允许打开未建立索引的bag文件。说明:在实际使用中,如果你只是想查看或播放bag文件中的所有消息,而不需要基于时间戳进行精确查询,那么你可以将allow_unindexed设置为True。但是,如果你打算对bag文件进行基于时间的查询或其他高级操作,最好先使用rosbag index命令建立索引,并确保在打开bag文件时allow_unindexed为False(或者简单地省略该参数,因为它默认为 False)。 -
options:字典格式,用于统一设置Bag的参数,目前只支持compression和chunk_threshold,源码处理如下:-
if options is not None:if type(options) is not dict:raise ValueError('options must be of type dict') if 'compression' in options:compression = options['compression']if 'chunk_threshold' in options:chunk_threshold = options['chunk_threshold']
-
-
skip_index:打开bag文件时是否跳过文件的索引,这可以节省一些内存和加载时间,特别是在处理非常大的bag文件时。然而,这也意味着将无法使用基于索引的高级查询功能,比如按时间戳搜索特定的消息。
2. 属性值
# 只能获取
options # 同上options
filename # bag文件名
version # rosbag的版本号
mode # 文件操作模式(r, w, a)
size # Bag文件的大小(bytes)# 可设置可获取
compression # 文件压缩模式
chunk_threshold # Bag 文件中每个块的最大字节数
3. 写bag文件内容
write(self, topic, msg, t=None, raw=False, connection_header=None)
其中,
topic:写入的topic名称msg:写入的msgt:时间戳,默认None以当前时间为时间戳raw:是否已原始数据格式写入,通常不推荐这样做。connection_header:连接头信息,通常不需要手动设置。通常用于内部处理,不是常规用法的一部分。
代码示例:
import rosbag
import rospkg
from std_msgs.msg import Int32, Stringrospack = rospkg.RosPack()
package_path = rospack.get_path('rosbag_learning')
bags_path = package_path + "/bags"bag = rosbag.Bag(bags_path+'/pytest.bag', 'w')try:s = String()s.string = 'hello'i = Int32()i.int = 42bag.write('/chatter', s)bag.write('/number', i)finally:bag.close()
4. 读bag文件内容
read_messages(self, topics=None, start_time=None, end_time=None, connection_filter=None, raw=False, return_connection_header=False)
其中,
topics:指定读取的topic,可以是一个topic列表,如果不指定,默认读取全部topic(可选)start_time:通过时间戳过滤消息(消息的最早时间戳,rospy.Time对象)(可选)end_time:通过时间戳过滤消息(消息的最晚时间戳,rospy.Time对象)(可选)connection_filter:一个函数,用于过滤连接。它应该接受一个连接对象并返回一个布尔值,以决定是否保留该连接的消息。如果为 None,则不过滤连接。raw:一个布尔值,指定是否以原始字节形式返回消息。如果为 True,则返回原始字节数据;如果为 False(默认值),则返回解析后的 ROS 消息对象。return_connection_header: 一个布尔值,如果为 True,则返回的每条消息都会是一个元组,其中第二个元素是连接头信息。如果为 False(默认值),则只返回消息本身。- 返回值:以(topic, message, timestamp)格式返回
代码示例:
import rosbag
import rospkgrospack = rospkg.RosPack()
package_path = rospack.get_path('rosbag_learning')
bags_path = package_path + "/bags"bag = rosbag.Bag(bags_path+'/pytest.bag')for topic, msg, t in bag.read_messages(topics=['/chatter', '/number']):print(f"Received message on topic {topic} at time {t}: {msg}")bag.close()
结果如下:

5. 将bag文件缓存写入磁盘
flush(self)
当你使用 write() 写入数据到 bag 文件时,数据可能不会立即被写入磁盘,而是会先被缓存起来以提高性能。调用 flush() 方法可以强制将这些缓存的数据写入到磁盘中,以确保所有挂起的数据都被写入到 bag 文件中。
它没有参数,并且执行后没有返回值。
在以下情况下,可能需要调用 flush() 方法:
-
确保数据持久化:当你想要确保所有已经写入 rosbag.Bag 对象的数据都已经持久化到磁盘上时,可以调用
flush()。这在你准备关闭 bag 文件或程序即将退出时特别有用,以确保不会有数据丢失。 -
实时备份:如果你正在实时记录数据到 bag 文件,并且想要定期备份这些数据,你可以在备份之前调用
flush(),以确保备份时所有需要的数据都已经写入到 bag 文件中。
代码示例:
import rospy
import rosbag
import rospkg
from std_msgs.msg import String, Int32rospy.init_node('bag_writer') rospack = rospkg.RosPack()
package_path = rospack.get_path('rosbag_learning')
bags_path = package_path + "/bags"# 创建一个bag文件用于写入
with rosbag.Bag(bags_path + '/flush.bag', 'w') as bag:# 写入一条消息msg = String(data='Hello, ROSbag!')bag.write('/chatter', msg, rospy.Time.now())# 在写入更多消息之前调用flush()bag.flush()# 这里可以继续写入更多消息msg = Int32(data=25)bag.write('/number', msg, rospy.Time.now())# 在退出with块之前,flush()会被自动调用(如果需要的话)
查看bag文件信息如下:

6. 重建 bag 文件索引
reindex(self)
当使用 rosbag 记录或播放数据时,rosbag 会维护一个内部索引,以便能够高效地检索和访问数据。然而,有时索引可能会损坏或变得不一致,这时就需要使用 reindex 方法来重新构建索引。
reindex(self) 方法没有参数,它会对当前打开的 bag 文件执行索引重建操作。重建索引可能需要一些时间,具体取决于 bag 文件的大小和内容。
以下是可能需要使用 reindex 方法的一些场景:
-
索引损坏:如果你怀疑 bag 文件的索引已经损坏或不一致,导致无法正常访问数据,你可以尝试使用
reindex方法来修复它。 -
添加新数据:如果你在 bag 文件关闭后向其中添加了新数据,但没有重新构建索引,那么这些新数据将不会被包含在旧的索引中。在这种情况下,你需要调用
reindex方法来更新索引,以便能够访问这些新数据。 -
优化性能:有时,即使索引没有损坏,重新构建索引也可能有助于提高访问数据的性能。特别是当 bag 文件非常大或包含大量数据时,重建索引可以帮助优化数据结构,提高检索速度。
代码示例:
import rosbag
import rospkgrospack = rospkg.RosPack()
package_path = rospack.get_path('rosbag_learning')
bags_path = package_path + "/bags"with rosbag.Bag(bags_path+'/pytest.bag', 'r') as bag:try:for topic, msg, t in bag.read_messages():print(f"Received message on topic {topic} at time {t}: {msg}")except Exception as e:print(f"An error occurred while reading the bag file: {e}")print("Reindexing the bag file...")bag.reindex() # 尝试重新索引 bag 文件print("Reindexing completed.")# 现在可以正常使用 bag 文件中的数据了
7. 获取bag文件的压缩信息
get_compression_info(self)
这个方法返回一个tuple(str, int, int),其中包含了关于 bag 文件压缩的详细信息,每一位表示如下:
tuple[0]:压缩格式,例如none(表示没有压缩)或bz2(表示使用了 bzip2 压缩)。tuple[1]:未压缩的数据大小(以字节为单位)tuple[2]:压缩后的数据大小(以字节为单位)
代码示例:
import rosbag
import rospkg rospack = rospkg.RosPack()
package_path = rospack.get_path('rosbag_learning')
bags_path = package_path + "/bags"# 打开一个存在的 bag 文件
with rosbag.Bag(bags_path+'/pytest.bag', 'r') as bag:# 获取压缩信息compression_info = bag.get_compression_info()# 打印压缩信息if compression_info:print("Compression Type:", compression_info[0])print("UnCompressed Size:", compression_info[1])print("compressed Size:", compression_info[2])else:print("The bag file is not compressed.")
8. 获取bag文件的消息数量
get_message_count(self, topic_filters=None)
这个方法允许你指定一个或多个话题过滤器(topic_filters),以便只计算特定话题的消息数。该参数接收一个字符串或字符串列表,用于指定要计算消息数的话题。如果未提供或设置为 None,则计算 bag 文件中所有话题的消息数。
代码示例:
import rosbag
import rospkg rospack = rospkg.RosPack()
package_path = rospack.get_path('rosbag_learning')
bags_path = package_path + "/bags"# 打开一个存在的 bag 文件
with rosbag.Bag(bags_path+'/pytest.bag', 'r') as bag:# 定义我们想要计算消息数的话题过滤器列表topic_filters = ['/chatter', '/number']# 获取指定话题的消息数量message_counts = bag.get_message_count(topic_filters=topic_filters)# 打印话题的消息数量print(f"Message Count: {message_counts}")
9. 获取bag文件记录的起止时间
get_start_time(self)
get_end_time(self)
get_start_time 函数的返回类型是 float,表示以秒为单位的时间戳,其中的小数部分,表示秒的分数。
代码示例:
import rosbag
import rospkg
from datetime import datetimerospack = rospkg.RosPack()
package_path = rospack.get_path('rosbag_learning')
bags_path = package_path + "/bags"# 打开一个存在的 bag 文件
with rosbag.Bag(bags_path+'/pytest.bag', 'r') as bag:# 获取 bag 文件的开始结束时间start_time = bag.get_start_time()end_time = bag.get_end_time()# 将时间转换为更易读的字符串格式start_time_str = datetime.fromtimestamp(start_time)end_time_str = datetime.fromtimestamp(end_time)# 打印开始结束时间print(f"Bag file start time: {start_time_str}")print(f"Bag file end time: {end_time_str}")
运行结果如下:

10. 获取话题信息与消息类型
get_type_and_topic_info(self, topic_filters=None)
其中,topic_filters 用于过滤指定的话题,如果没有提供,则分析所有话题。
函数返回值类型如下:
TypesAndTopicsTuple(dict(str, str), dict(str, TopicTuple(str, int, int, float)))
其中各值说明如下:
TypesAndTopicsTuple(msg_types{key:type name, val: md5hash}, topics{key: topic name, value: TopicTuple(msg_type: msg type (Ex. "std_msgs/String"),message_count: the number of messages of the particular type,connections: the number of connections,frequency: the data frequency)})
其中,
msg_types:是一个字典,key为msg类型,value为msgMD5值。topics:是一个字典,key为topic名称,value是一个元组,其中:msg_type:该topic的消息类型message_count:该topic的消息数量connections:该topic的连接数量frequency:该topic的数据频率
代码示例:
import rosbag
import rospkg
from datetime import datetimerospack = rospkg.RosPack()
package_path = rospack.get_path('rosbag_learning')
bags_path = package_path + "/bags"# 打开一个存在的 bag 文件
with rosbag.Bag(bags_path+'/pytest.bag', 'r') as bag:topic_filters = ['/chatter', '/number']msg_types, topics = bag.get_type_and_topic_info(topic_filters)print("Message Types:")for type_name, md5_hash in msg_types.items():print(f" {type_name}: {md5_hash}")print("Topics:")for type_name, topic_info in topics.items():print(" Topic: {}, Type: {}, MessageCount: {}, Connections: {}, Frequency: {}".format(type_name, topic_info.msg_type, topic_info.message_count, topic_info.connections,topic_info.frequency))
运行结果:

相关文章:
[ROS 系列学习教程] rosbag Python API
ROS 系列学习教程(总目录) 本文目录 1. 构造函数与关闭文件2. 属性值3. 写bag文件内容4. 读bag文件内容5. 将bag文件缓存写入磁盘6. 重建 bag 文件索引7. 获取bag文件的压缩信息8. 获取bag文件的消息数量9. 获取bag文件记录的起止时间10. 获取话题信息与消息类型 rosbag 的 Pyt…...

TCL管理Vivado工程
文章目录 TCL管理Vivado工程1. 项目目录2. 导出脚本文件3. 修改TCL脚本3.1 project.tcl3.2 bd.tcl 4. 工程恢复 TCL管理Vivado工程 工程结构 1. 项目目录 config: 配置文件、coe文件等。doc: 文档fpga: 最后恢复的fpga工程目录ip: ip文件mcs: bit流文件等,方便直接使用src: .…...
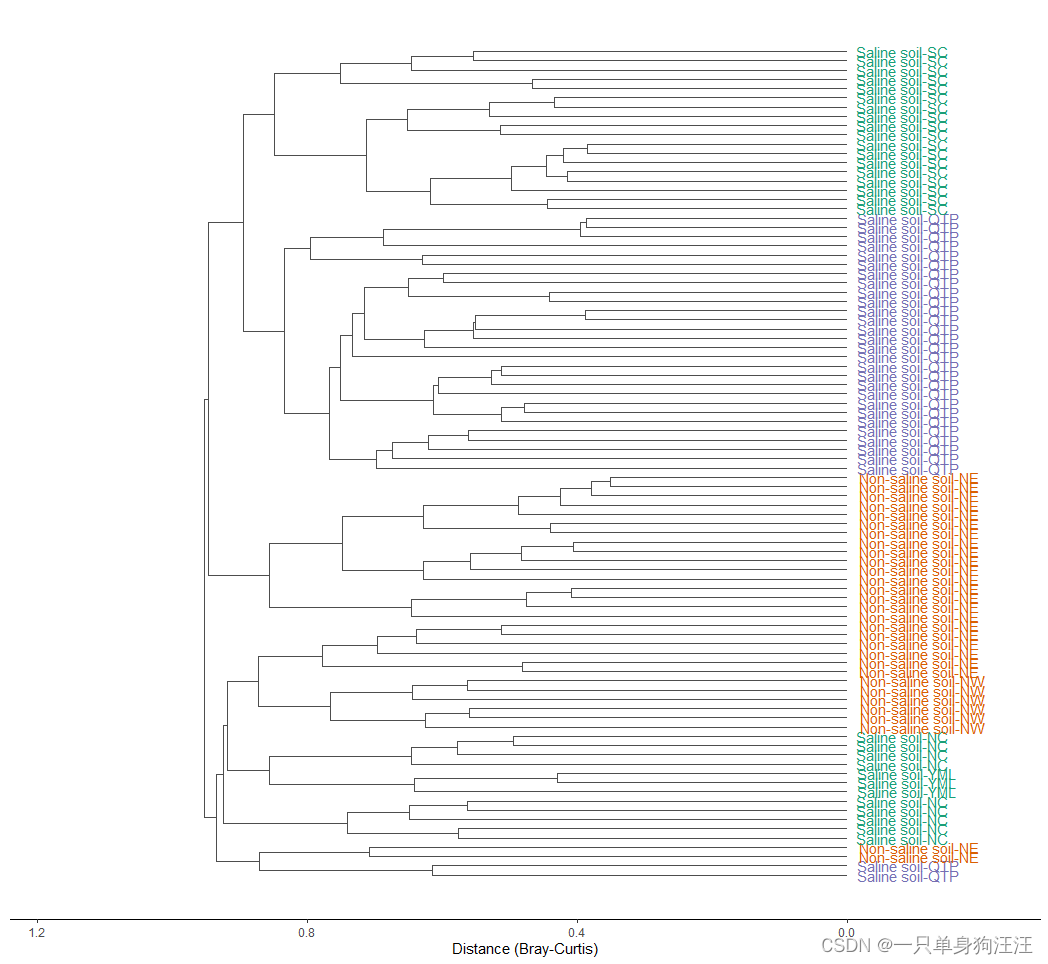
R语言:microeco:一个用于微生物群落生态学数据挖掘的R包,第四:trans_beta class
trans_beta class:利用trans_beta类可以变换和绘制beta分集的距离矩阵。该类中涉及到beta多样性的分析主要包括排序、群距、聚类和方差分析。我们首先使用PCoA显示排序。 > dataset$cal_betadiv() The result is stored in object$beta_diversity ... > t1 &…...
)
Excel文件导入导出,SpringBoot整合EasyExcel批量导入导出,采用的JDBC+EasyExcel(附带整个Demo)
目录 0.为什么mybatis的foreach比JDBC的addBatch慢 1.引入依赖 2.Controller层 3.Service层 4.Utils工具类 5.自定义监听器 6.实体类 7Mapper层 不用Mybatis的原因就是因为在大量数据插入的时候jdbc性能比mybatis好1. 首先分批读取Excel中的数据 这一点EasyExcel有自己…...
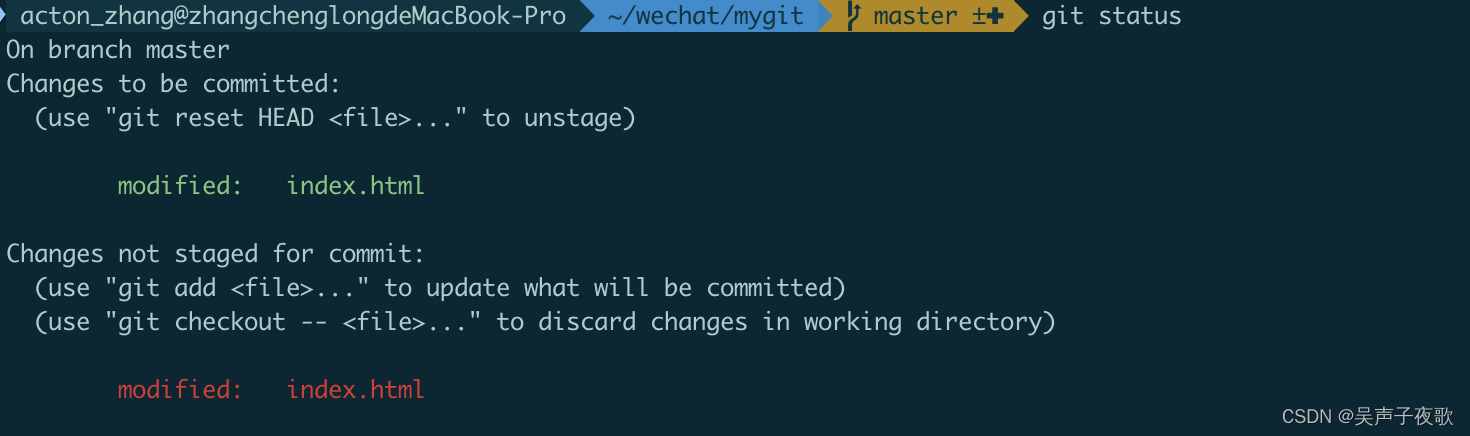
Git——本地使用详解
目录 Git1、开始版本控制1.1、初始化Repository1.2、使目录脱离Git控制 2、把文件交给Git管控2.1、创建文件后交给Git2.2、git add之后再次修改文件2.3、git add "--all"与"."参数区别2.4、把暂存区的内容提交到存储库里存档 3、工作区、暂存区与存储库3.1…...

深度学习pytorch——Tensor维度变换(持续更新)
view()打平函数 需要注意的是打平之后的tensor是需要有物理意义的,根据需要进行打平,并且打平后总体的大小是不发生改变的。 并且一定要谨记打平会导致维度的丢失,造成数据污染,如果想要恢复到原来的数据形式,是需要…...

Selenium-webdriver_manager判断是否已经下载过驱动(复用缓存驱动)
1,谷歌浏览器默认位置 2,ChromeDriverManager 下载的驱动位置 其中admin为机器的用户名 def installDriver(self):"""判断是否需要下载driver""""""找到本机谷歌浏览器版本""""""C:\P…...
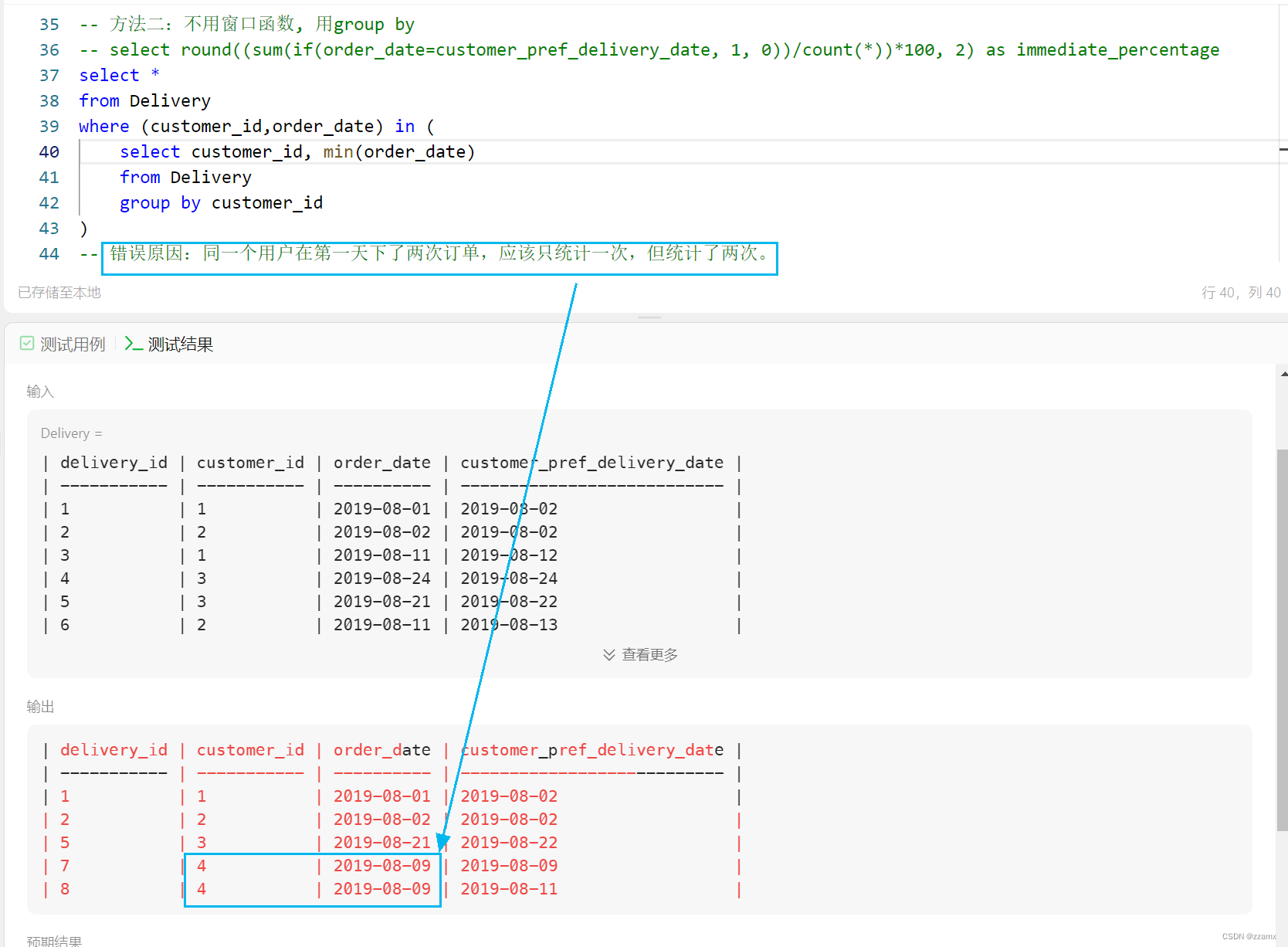
【SQL】1174. 即时食物配送 II (窗口函数row_number; group by写法;对比;定位错因)
前述 推荐学习: 通俗易懂的学会:SQL窗口函数 题目描述 leetcode题目:1174. 即时食物配送 II 写法一:窗口函数 分组排序(以customer_id 分组,按照order_date 排序),窗口函数应用。…...

mvcc介绍
前提:在介绍mvcc之前,先简单介绍一下mysql事务的相关问题,mvcc归根结底是用来解决事务并发问题的,当然这个解决不是全部解决,只是解决了其中的一部分问题! mysql事务 一、事务的基本要素(ACID&a…...
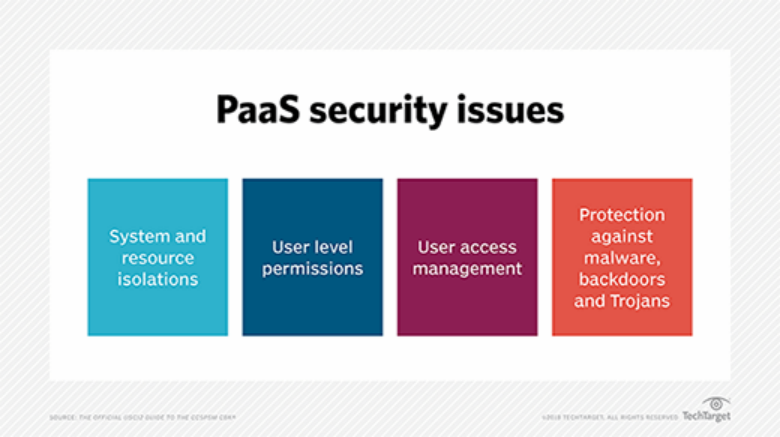
强化PaaS平台应用安全:关键策略与措施
PaaS(平台即服务,Platform-as-a-Service)是一种云计算服务模式,可以为客户提供一个完整的云平台(硬件、软件和基础架构)以用于快捷开发、运行和管理项目,从而降低了企业云计算应用的高成本和复杂…...

K8s 集群高可用master节点ETCD挂掉如何恢复?
写在前面 很常见的集群运维场景,整理分享博文内容为 K8s 集群高可用 master 节点故障如何恢复的过程理解不足小伙伴帮忙指正 不必太纠结于当下,也不必太忧虑未来,当你经历过一些事情的时候,眼前的风景已经和从前不一样了。——村上…...

【Godot 4.2】常见几何图形、网格、刻度线点求取函数及原理总结
概述 本篇为ShapePoints静态函数库的补充和辅助文档。ShapePoints函数库是一个用于生成常见几何图形顶点数据(PackedVector2Array)的静态函数库。生成的数据可用于_draw和Line2D、Polygon2D等进行绘制和显示。因为不断地持续扩展,ShapePoint…...

如何利用POI导出报表
一、报表格式 二、依赖坐标 <dependency><groupId>org.apache.poi</groupId><artifactId>poi</artifactId><version>3.16</version> </dependency> <dependency><groupId>org.apache.poi</groupId><art…...

自动部署SSL证书到阿里云腾讯云CDN
项目地址:https://github.com/yxzlwz/ssl_update 项目简介 目前,自动申请和管理免费SSL证书的项目有很多,如个人正在使用的 acme.sh。然而在申请后,如果我们的需求不仅限于服务器本地的使用,证书的部署也是一件麻烦事…...
【系统性】 循序渐进学C++
循序渐进学C 第一阶段:基础 一、环境配置 1.1.第一个程序(基本格式) #include <iosteam> using namespace std;int main(){cout<<"hello world"<<endl;system("pause"); } 模板 #include &…...

rust - 一个日志缓存记录的通用实现
本文给出了一个通用的设计模式,通过建造者模式实例化记录对象,可自定义格式化器将实例化后的记录对象写入到指定的缓存对象中。 定义记录对象 use chrono::prelude::*; use std::{cell::RefCell, ffi::OsStr, fmt, io, io::Write, path::Path, rc::Rc,…...
(黑马))
elasticsearch(RestHighLevelClient API操作)(黑马)
操作全是换汤不换药,创建一个request,然后使用client发送就可以了 一、增加索引库数据 Testvoid testAddDocument() throws IOException {//从数据库查出数据Writer writer writerService.getById(199);//将查出来的数据处理成json字符串String json …...

用尾插的思想实现移除链表中的元素
目录 一、介绍尾插 1.链表为空 2.链表不为空 二、题目介绍 三、思路 四、代码 五、代码解析 1. 2. 3. 4. 5. 6. 六、注意点 1. 2. 一、介绍尾插 整体思路为 1.链表为空 void SLPushBack(SLTNode** pphead, SLTDataType x) {SLTNode* newnode BuyLTNode(x); …...

【Kubernetes】k8s删除master节点后重新加入集群
目录 前言一、思路二、实战1.安装etcdctl指令2.重置旧节点的k8s3.旧节点的的 etcd 从 etcd 集群删除4.在 master03 上,创建存放证书目录5.把其他控制节点的证书拷贝到 master01 上6.把 master03 加入到集群7.验证 master03 是否加入到 k8s 集群,检查业务…...
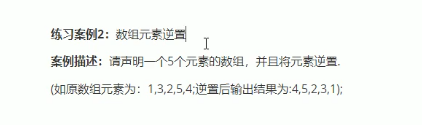
HCIP—OSPF虚链路实验
OSPF虚链路—Vlink 作用:专门解决OSPF不规则区域所诞生的技术,是一种虚拟的,逻辑的链路。实现非骨干区域和骨干区域在逻辑上直接连接。注意虚链路条件:只能穿越一个区域,通常对虚链路进行认证功能的配置。虚链路认证也…...

Golang 面试经典题:map 的 key 可以是什么类型?哪些不可以?
Golang 面试经典题:map 的 key 可以是什么类型?哪些不可以? 在 Golang 的面试中,map 类型的使用是一个常见的考点,其中对 key 类型的合法性 是一道常被提及的基础却很容易被忽视的问题。本文将带你深入理解 Golang 中…...

第 86 场周赛:矩阵中的幻方、钥匙和房间、将数组拆分成斐波那契序列、猜猜这个单词
Q1、[中等] 矩阵中的幻方 1、题目描述 3 x 3 的幻方是一个填充有 从 1 到 9 的不同数字的 3 x 3 矩阵,其中每行,每列以及两条对角线上的各数之和都相等。 给定一个由整数组成的row x col 的 grid,其中有多少个 3 3 的 “幻方” 子矩阵&am…...
)
Android第十三次面试总结(四大 组件基础)
Activity生命周期和四大启动模式详解 一、Activity 生命周期 Activity 的生命周期由一系列回调方法组成,用于管理其创建、可见性、焦点和销毁过程。以下是核心方法及其调用时机: onCreate() 调用时机:Activity 首次创建时调用。…...

2025季度云服务器排行榜
在全球云服务器市场,各厂商的排名和地位并非一成不变,而是由其独特的优势、战略布局和市场适应性共同决定的。以下是根据2025年市场趋势,对主要云服务器厂商在排行榜中占据重要位置的原因和优势进行深度分析: 一、全球“三巨头”…...

Git常用命令完全指南:从入门到精通
Git常用命令完全指南:从入门到精通 一、基础配置命令 1. 用户信息配置 # 设置全局用户名 git config --global user.name "你的名字"# 设置全局邮箱 git config --global user.email "你的邮箱example.com"# 查看所有配置 git config --list…...
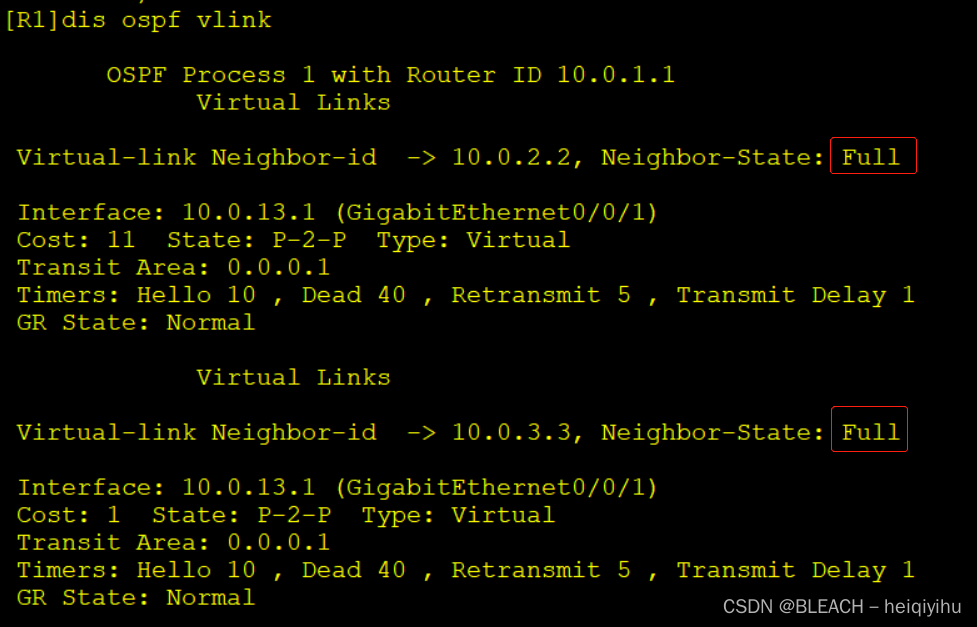
【Post-process】【VBA】ETABS VBA FrameObj.GetNameList and write to EXCEL
ETABS API实战:导出框架元素数据到Excel 在结构工程师的日常工作中,经常需要从ETABS模型中提取框架元素信息进行后续分析。手动复制粘贴不仅耗时,还容易出错。今天我们来用简单的VBA代码实现自动化导出。 🎯 我们要实现什么? 一键点击,就能将ETABS中所有框架元素的基…...

Pydantic + Function Calling的结合
1、Pydantic Pydantic 是一个 Python 库,用于数据验证和设置管理,通过 Python 类型注解强制执行数据类型。它广泛用于 API 开发(如 FastAPI)、配置管理和数据解析,核心功能包括: 数据验证:通过…...
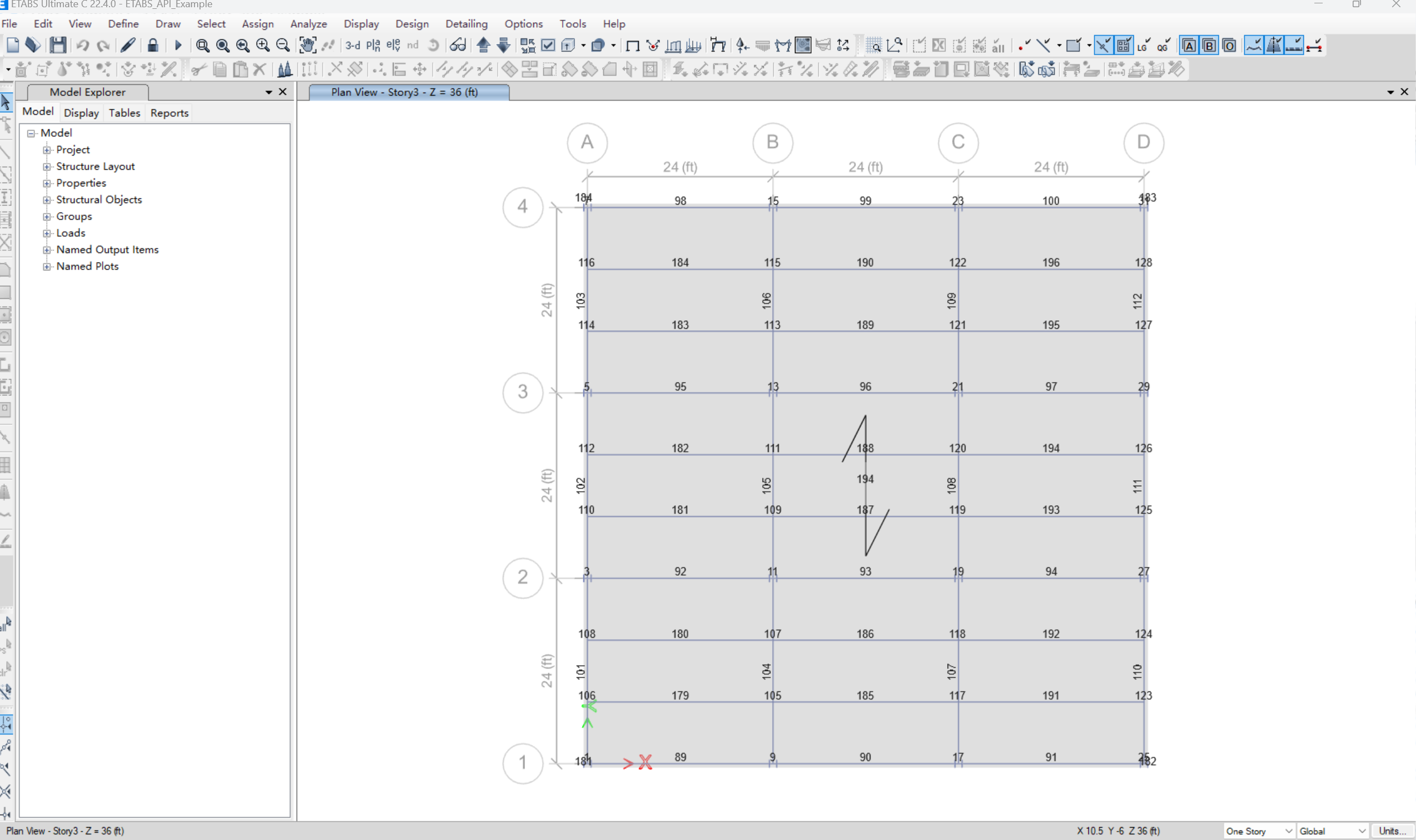
ui框架-文件列表展示
ui框架-文件列表展示 介绍 UI框架的文件列表展示组件,可以展示文件夹,支持列表展示和图标展示模式。组件提供了丰富的功能和可配置选项,适用于文件管理、文件上传等场景。 功能特性 支持列表模式和网格模式的切换展示支持文件和文件夹的层…...
2.3 物理层设备
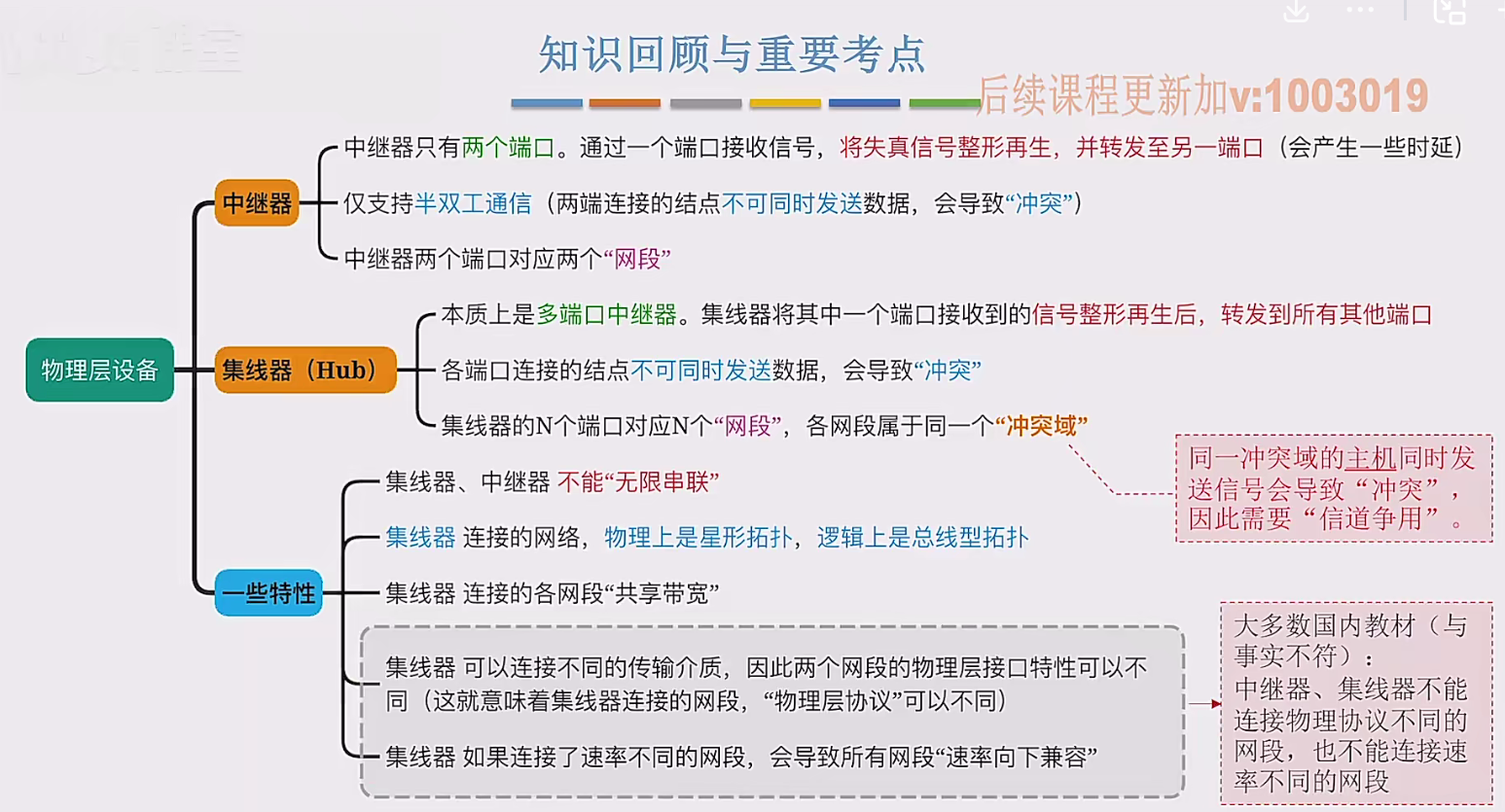
在这个视频中,我们要学习工作在物理层的两种网络设备,分别是中继器和集线器。首先来看中继器。在计算机网络中两个节点之间,需要通过物理传输媒体或者说物理传输介质进行连接。像同轴电缆、双绞线就是典型的传输介质,假设A节点要给…...

【实施指南】Android客户端HTTPS双向认证实施指南
🔐 一、所需准备材料 证书文件(6类核心文件) 类型 格式 作用 Android端要求 CA根证书 .crt/.pem 验证服务器/客户端证书合法性 需预置到Android信任库 服务器证书 .crt 服务器身份证明 客户端需持有以验证服务器 客户端证书 .crt 客户端身份…...