NVIDIA 发布 Project GR00T 人形机器人基础模型和 Isaac 机器人平台重大更新
系列文章目录
前言
Isaac 机器人平台现可为开发者提供全新的机器人训练仿真器、Jetson Thor 机器人计算机、生成式 AI 基础模型和由 CUDA 加速的感知和操作库。

美国加利福尼亚州圣何塞 —— GTC —— 太平洋时间 2024 年 3 月 18 日 —— NVIDIA 于今日发布人形机器人通用基础模型 Project GR00T,旨在进一步推动其在机器人和具身智能方面的突破。
NVIDIA 还发布了一款基于 NVIDIA Thor 系统级芯片(SoC)的新型人形机器人计算机 Jetson Thor,并对 NVIDIA Isaac™ 机器人平台进行了重大升级,包括生成式 AI 基础模型和仿真工具,以及 AI 工作流基础设施。
NVIDIA 创始人兼首席执行官黄仁勋表示:“开发通用人形机器人基础模型是当今 AI 领域中最令人兴奋的课题之一。世界各地的机器人技术领导者正在汇集各种赋能技术,致力于在人工通用机器人领域实现突破。”
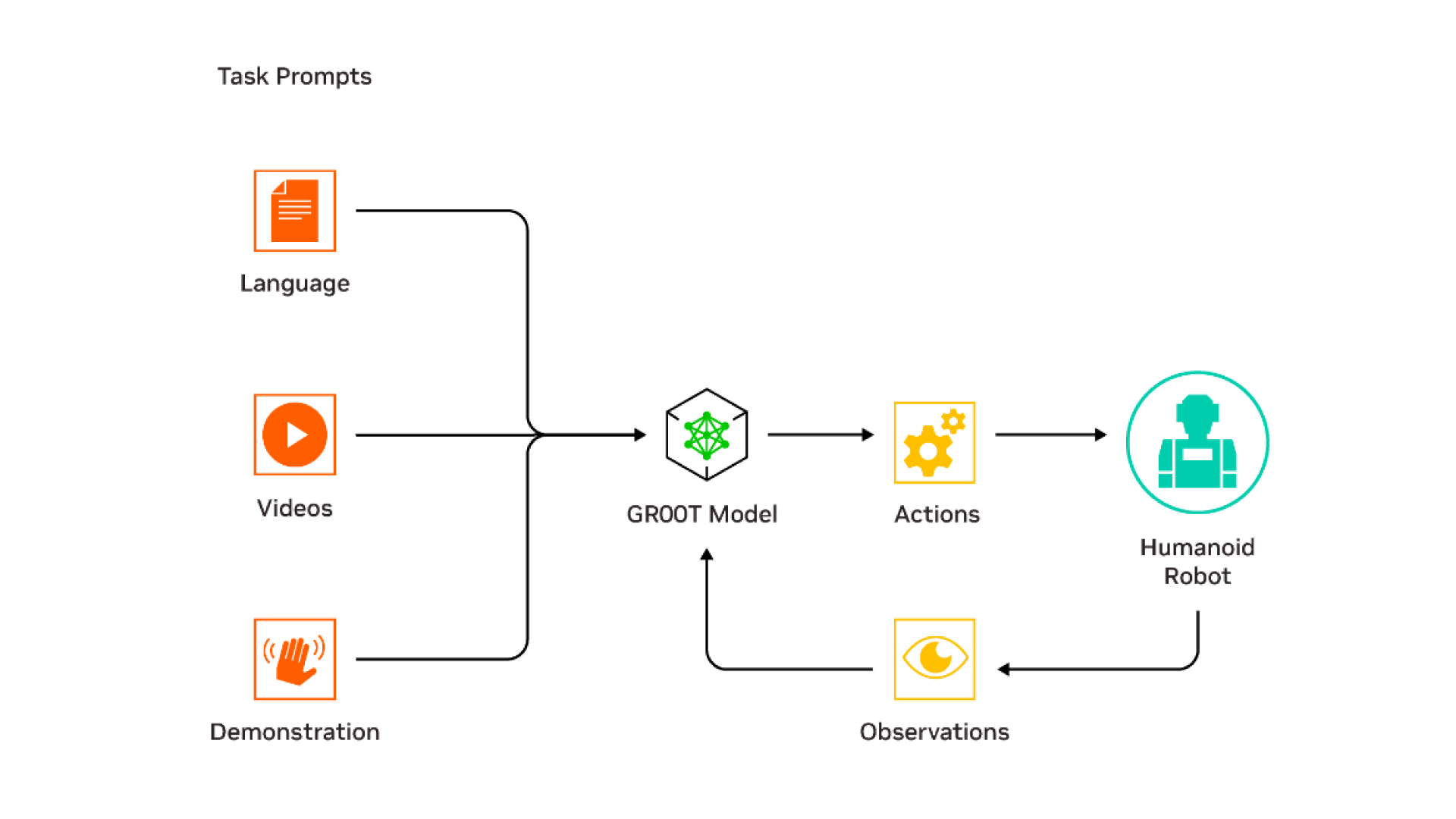
GR00T 驱动的机器人(代表通用机器人 00 技术)将能够理解自然语言,并通过观察人类行为来模仿动作——快速学习协调、灵活性和其它技能,以便导航、适应现实世界并与之互动。在 GTC 大会的主题演讲中,NVIDIA 创始人兼首席执行官黄仁勋展示了数台这样的机器人是如何完成各种任务的。
专为人形机器人打造
Jetson Thor 是一个全新的计算平台,能够执行复杂的任务并安全、自然地与人和机器交互,具有针对性能、功耗和尺寸优化的模块化架构。
该 SoC 包括一个带有 transformer engine 的下一代 GPU,其采用 NVIDIA Blackwell 架构,可提供每秒 800 万亿次8位浮点运算 AI 性能,以运行 GR00T 等多模态生成式 AI 模型。凭借集成的功能安全处理器、高性能 CPU 集群和 100GB 以太网带宽,大大简化了设计和集成工作。
NVIDIA 正在为领先的人形机器人公司开发一个综合的 AI 平台,如 1X Technologies、Agility Robotics、Apptronik、波士顿动力公司、Figure AI、傅利叶智能、Sanctuary AI、宇树科技和小鹏鹏行等。
Agility Robotics 联合创始人兼首席机器人官 Jonathan Hurst 表示:“我们正处于历史的转折点,像 Digit 这样以人为中心的机器人将永远改变劳动力市场。现代 AI 将加速发展,为 Digit 这样的机器人铺平道路,在日常生活的各个方面帮助人类。我们很高兴能与 NVIDIA 合作,投资于计算、仿真工具、机器学习环境和其他必要的基础设施,让机器人真正融入人们的日常生活。”
Sanctuary AI 联合创始人兼首席执行官 Geordie Rose 表示:“具身智能不仅有助于解决人类面临的一些最大挑战,还将创造目前超出我们能力范围或想象的创新。如此重要的技术不应该建立在孤岛之上,这就是为什么我们非常重视像 NVIDIA 这样的长期合作伙伴。”
Isaac 平台的重大更新
GR00T 使用的 Isaac 工具还能够为在任何环境中的任何机器人创建新的基础模型。这些工具包括用于强化学习的 Isaac Lab 和用于计算编排服务的 OSMO。
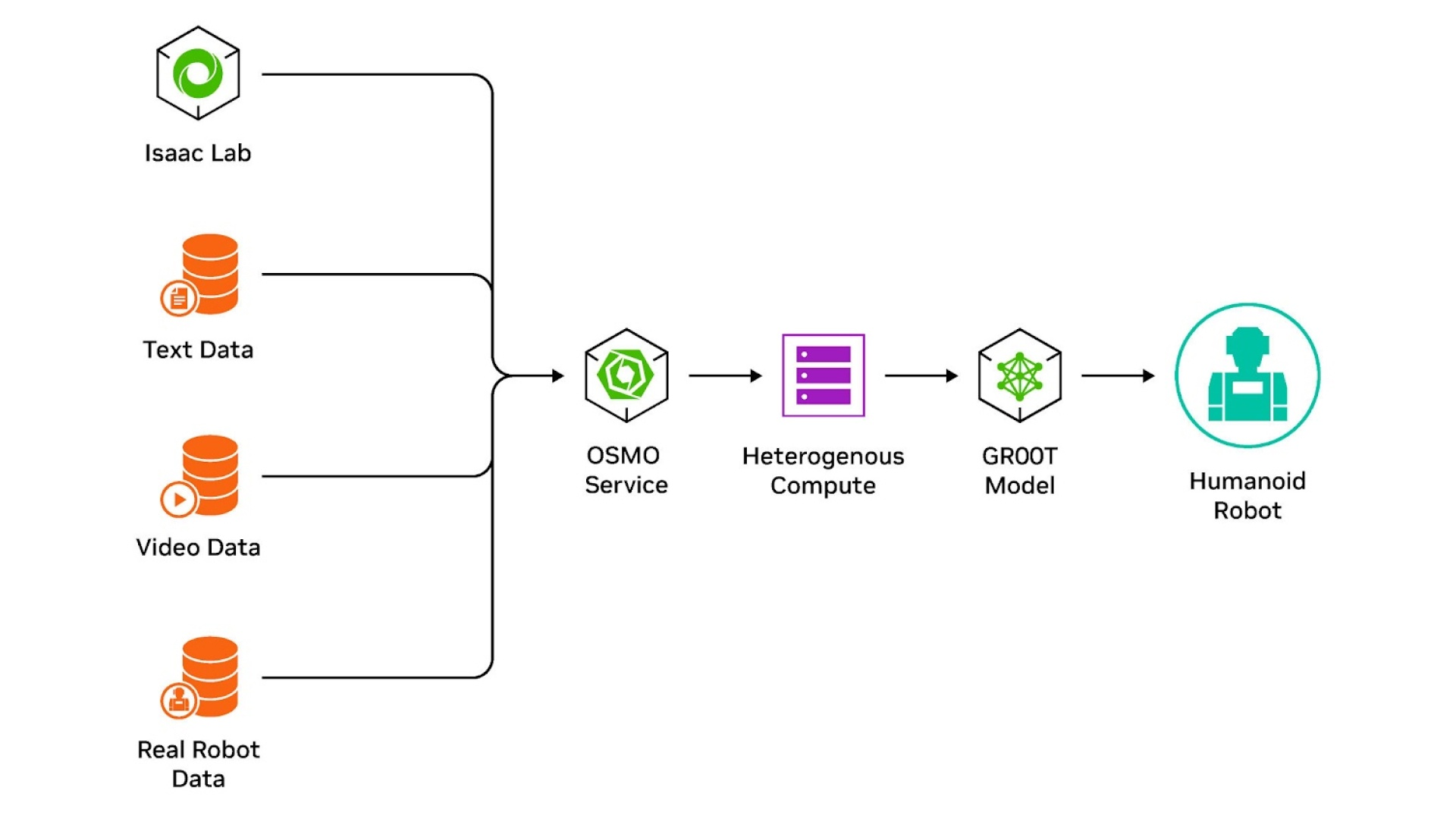
训练具身智能模型需要海量的真实数据和合成数据。新的 Isaac Lab 是一个 GPU 加速、性能优化的轻量级应用,基于 Isaac Sim 而构建,专门用于运行数千个用于机器人学习的并行仿真。
为了扩展异构计算的机器人开发工作负载,OSMO 在分布式环境中协调数据生成、模型训练和软硬件在环工作流。
NVIDIA 还发布了 Isaac Manipulator 和 Isaac Perceptor 等一系列机器人预训练模型、库和参考硬件。
Isaac Manipulator 为机械臂提供了卓越的灵活性和模块化 AI 功能,并提供了一系列强大的基础模型和 GPU 加速库。它提供了高达 80 倍的路径规划加速,零样本感知提高了效率和吞吐量,使开发者能够实现更多新的机器人任务的自动化。早期生态系统合作伙伴包括安川电机、泰瑞达旗下子公司优傲、PickNik Robotics、Solomon、READY Robotics 和 Franka Robotics。
Isaac Perceptor 提供了多摄像头和 3D 环绕视觉功能,这些功能正越来越多地被制造业和物流业中的自主移动机器人所采用,以提高效率和更好地保护工人,同时降低错误率和成本。早期采用者包括 ArcBest、比亚迪和凯傲集团等,它们的目标是为物料搬运等操作带来新的自主化水平。
新的 Isaac 平台功能将在下个季度推出。了解有关 Project GR00T 的更多信息。
英伟达项目 GR00T
通用机器人 00 技术
GR00T 是一种通用基础模型,有望改变仿真和现实世界中的人形机器人学习。经过英伟达™(NVIDIA®)GPU加速仿真训练,GR00T能够让人形机器人通过模仿学习和英伟达™(NVIDIA®)Isaac实验室进行强化学习,并从视频数据中生成机器人动作。GR00T 模型将多模态指令和过去的互动作为输入,并生成机器人要执行的动作。
请在下方注册,以获得有关 GR00T 项目可用性的通知。
机器人学习和扩展开发工作负载
我们开发了 NVIDIA Isaac Lab 来大规模训练 GR00T,并构建了 NVIDIA OSMO,这是一种计算协调服务,可在用于训练的 NVIDIA DGX 系统、用于仿真的 NVIDIA OVX 系统以及用于硬件在环验证的 NVIDIA IGX 和 NVIDIA AGX 系统之间协调训练和推理工作流。
英伟达™(NVIDIA®)Isaac Manipulator
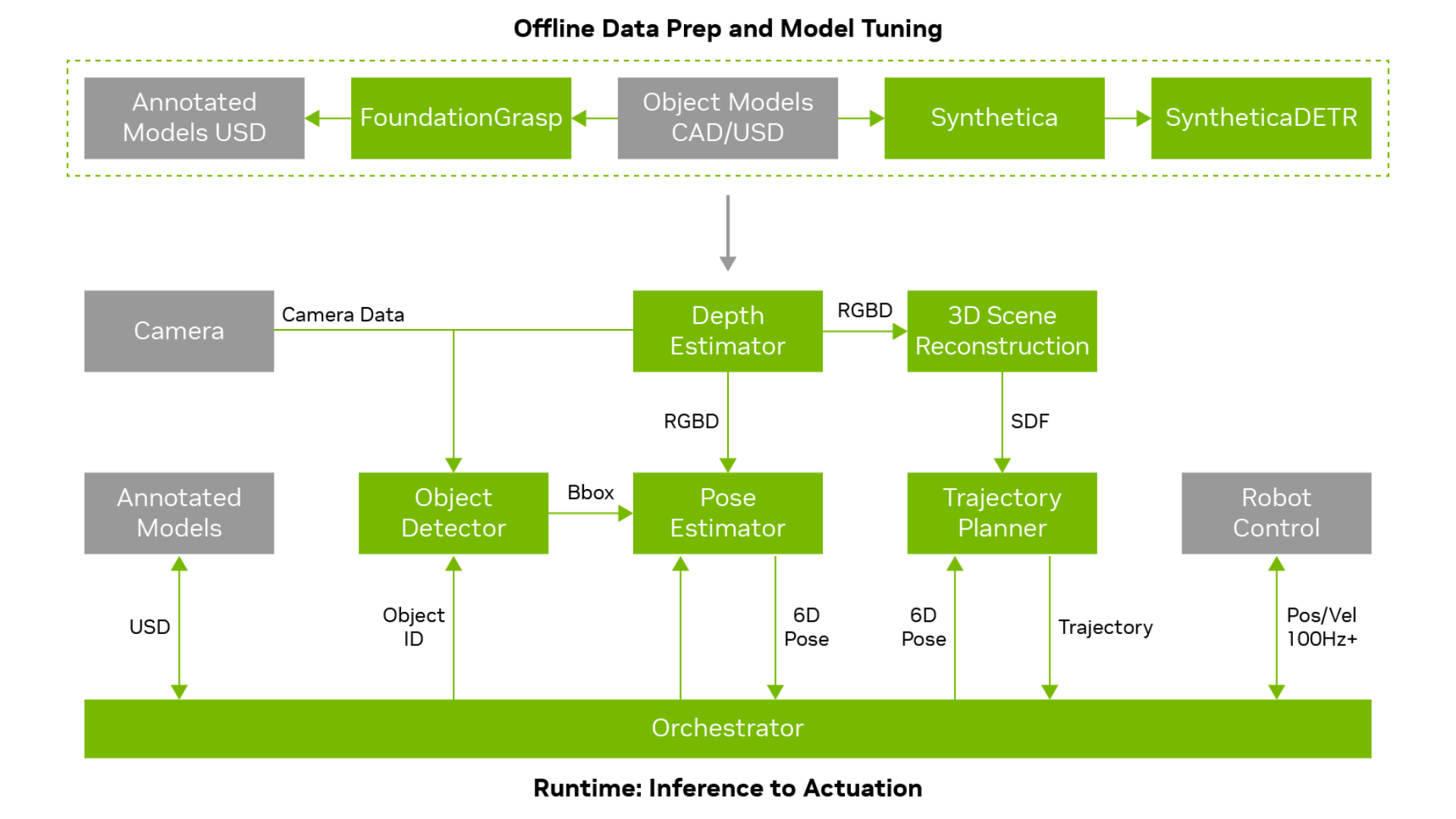
Isaac Manipulator 是一系列基础模型和模块化 GPU 加速库,通过加速人工智能模型训练和任务(重新)编程,帮助为动态操纵任务构建可扩展、可重复的工作流程。它将彻底改变机器人软件开发人员如何利用定制软件组件完成特定任务的方式,如机器护理、装配任务等,使操纵臂能够无缝感知周围环境并与之互动。
在下方注册,即可获得开发人员预览版的通知。

为机器人增添新的智能
Isaac Manipulator 为机械臂带来了新的灵巧性和模块化人工智能功能,这些机械臂在处理复杂任务和动态环境时受到限制,因为它们的适应性有限,而且每遇到新情况都要手动重新执行任务。
高精度和高性能模块
访问一系列先进的模块化软件包,用于无摩擦运动学、人工智能感知、工业机械臂的操纵以及即时创建端到端工作流程。
加速机器人运动生成
带有 MoveIt 扩展功能的 NVIDIA cuMotion 可让您实现自定义算法模块,而无需大量流水线开销。
更快的开发时间
预训练基础模型可估算和跟踪物体姿势、预测理想抓取点、运行机械臂轨迹优化等,从而加快机器人任务的实施。
英伟达™(NVIDIA®)Isaac 感知器
NVIDIA Isaac™ Perceptor 是一套用于视觉人工智能的硬件加速软件包,专为自主移动机器人 (AMR) 量身定制,用于在非结构化环境中进行感知、定位和稳健操作。机器人软件开发人员现在可以轻松获得基于人工智能的整套感知能力,确保在复杂场景中可靠运行和障碍物检测。
请在下方注册,以获得有关 Isaac Perceptor 上市的通知。
主要优势
由于仓库操作和工厂生产线固有的多变性,AMR 环境带来了独特的挑战。这些挑战包括特定任务的复杂性,如装载和卸载。人工智能(AI)可通过基于 ROS 2 的 Isaac Perceptor 提供的先进 3D 感知能力来解决这些复杂问题。 这种组合可确保最佳性能和模块化,满足您的特定需求。
针对移动机器人进行全面优化
英伟达™(NVIDIA®)解决方案专为自主叉车和各种工业移动机器人定制。它们配备了强大的视觉里程计和 3D 环绕视觉,可用于障碍物检测和占用地图绘制。
可扩展传感器架构
利用业内首个可扩展架构,可安装 1 到 8 个摄像头,并在所有摄像头和惯性测量单元 (IMU) 之间实现时间同步。
部署就绪
Isaac Perceptor预集成了经过广泛测试的移动机器人子图,确保与现有软件栈和机器人无缝集成。
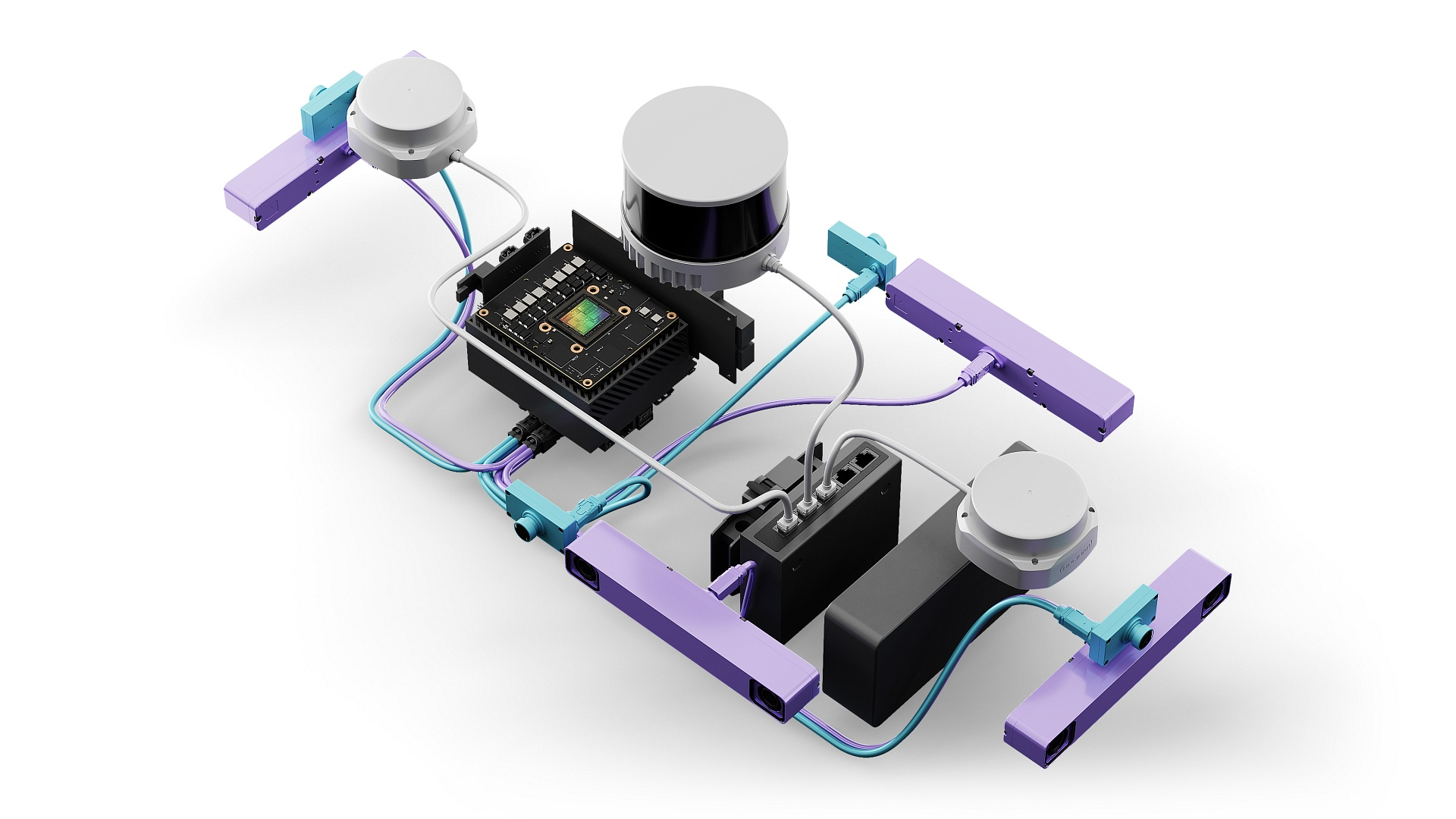
Nova Orin 开发套件
这款功能强大的计算和传感器平台旨在帮助机器人原始设备制造商和软件公司加快 AMR 的开发和部署。主要功能包括
精确的多传感器时间同步,传感器数据采集时间小于 100us
用于在机器人上进行评估的文档和软件
传感器参考模型(在 NVIDIA Isaac Sim™ 中),用于仿真开发
新星卡特
这款先进的参考机器人已组装完毕,可与 Isaac Perceptor 一起使用。它包括一个英伟达™(NVIDIA)Jetson AGX Orin™系统模块,计算能力高达275 TOPS,并使用激光雷达和一组立体摄像头进行环绕感知、绘图和导航。该机器人经过校准和测试,开箱即可使用,为您提供了宝贵的时间来创新新特性和新功能。
Nova Carter非常适合收集数据,用于绘制仓库或工厂等测试区域的地图。处理后的数据可以部署到卡特中,以实现完全自主。

相关文章:
NVIDIA 发布 Project GR00T 人形机器人基础模型和 Isaac 机器人平台重大更新
系列文章目录 前言 Isaac 机器人平台现可为开发者提供全新的机器人训练仿真器、Jetson Thor 机器人计算机、生成式 AI 基础模型和由 CUDA 加速的感知和操作库。 Project GR00T 是一种多模态人形机器人通用基础模型,作为机器人的大脑,使它们能够学习技能…...
05.循环
格式: 05.循环 01.循环语句02.while循环1.1while循环1.2.死循环1.3 while循环应用 计算123。。。100的和 03.for循环(迭代循环)3.1 基本格式3.2 range() 04.break和continue关键字4.1 break4.2 continue 01.循环语句 02.while循环 03.for循环…...

Git 分布式版本控制系统基本概念和操作命令
目录 Git 基本概念 功能特点 工作流程 操作命令 新建代码库 配置 增删文件 代码提交 分支 标签 查看信息 远程同步 撤销 其他 小结 Git Git 是一个开源的分布式版本控制系统,用于跟踪文件的变更历史。它最初由 Linux Torvalds 设计,用于…...

Python3爬取2023省市区
爬取地址https://www.stats.gov.cn/sj/tjbz/tjyqhdmhcxhfdm/2023/ import re import requests import pandas as pd import warnings warnings.filterwarnings("ignore") import time from lxml import etree import pymysql t ,urls ,names [],[],[] INDEX_URL &…...

放弃 Rust 选择 Zig,Xata 团队推出 pgzx —— 计划使用 Zig 开发基于 PG 的分布式数据库
Summary Xata 公司在基于 PostgresSQL 开发自己的分布式数据库,出于 Zig 和 C 语言以及 PostgreSQL 的 API 有更好的互操作性的考虑,他们选择了 Zig 而非当红炸子鸡语言 Rust。他们的博客文章中对 pgzx 进行了介绍。让我们来看下他们对 Zig 和 Rust 语言…...
线性数据结构----(数组,链表,栈,队列,哈希表)
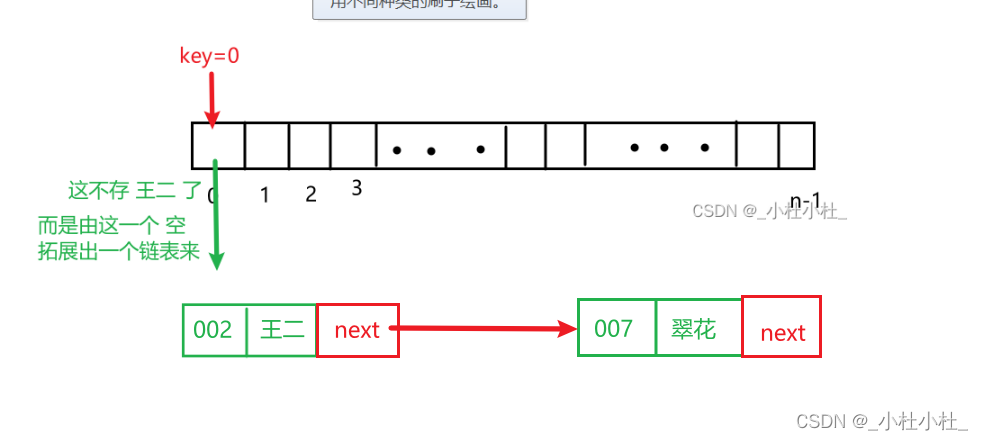
线性数据结构 数组链表栈使用场景 队列应用场景 哈希表特点哈希函数,哈希值,哈希冲突键值对 Entry 开放寻址法和拉链法 参考文档 数组 数组(Array) 是一种很常见的数据结构。由相同类型的元素组成,并且是使用一块连续的内存来存储的。 在数组…...
lvgl 窗口 windows lv_port_win_visual_studio 版本 已解决
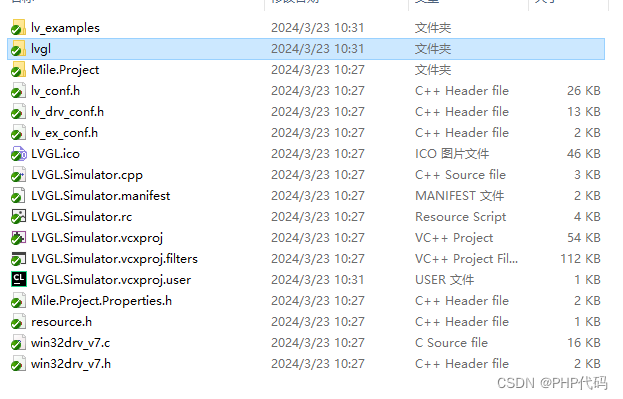
不知道的东西,不知道lvgl窗口。一切从未知开始 lv_port_win_visual_studio 主分支 对应的分支 v7版本更新git submodule update --init --recursive同步 lvgl代码随后打开 visualSudio 打开.sln 文件 编译 release模式 允许 一切正常代码部分...

【多模态融合】SuperFusion 激光雷达与相机多层次融合 远距离高清地图预测 ICRA 2024
前言 本文介绍激光雷达与相机进行多层次融合,包括数据级融合、特征级融合和BEV级融合。 融合后的BEV特征可以支持不同的任务头,包括语义分割、实例编码和方向预测,最后进行后处理生成高清地图预测,它是来自ICRA 2024的。 会讲解…...

富格林:梳理正规本领远离虚假套路
富格林悉知,黄金投资者在从事黄金交易之前,必须先了解黄金交易的风险。因为投资虽然能给你带来一定的收益,但往往也有亏损的风险。在进场后投资者可通过正规经验指导有效避免因为虚假诱导带来的异常亏损,增加安全做单盈利机会。以…...
fastadmin学习01-windows下安装部署
下载源代码 官网 安装 解压,然后使用phpstorm打开 修改配置文件 创建数据库 -- drop database fastadmin01; create database fastadmin01;这样fastadmin就部署好了 访问主页也能看到前台页面...

JAVA学习-网络编程.TCP
TCP(Transmission Control Protocol)是一种面向连接的、可靠的传输协议,它在Java网络编程中被广泛应用。TCP通信可以确保数据的可靠传输,并且具有一定的顺序性。 一、Java中实现TCP通信主要有以下几种方式: 1. Socke…...

[Android]创建Google Play内购aab白包
开发时需要调试Google内购,需要先往Google商店传一个白包上去。确定包名,然后进行内购产品创建。 1.创建一个空项目,填写正式名称和正式包名。 如果你只是为一个测试开发账号打白包,然后进行内购测试,这时包名随便写…...
大数据基础:Linux基础详解
课程介绍 本课程主要通过对linux基础课程的详细讲解,让大家熟练虚拟机的安装使用,Linux系统的安装配置,学习掌握linux系统常用命令的使用,常用的软件安装方法,制作快照,克隆,完成免密登录&…...

unity中 鼠标按下移动端与pc端的位置
if (Input.GetMouseButtonDown(0)) { Vector2 V Input.touchCount > 0 ? Input.GetTouch(0).position : new Vector2(Input.mousePosition.x, Input.mousePosition.y); } 射线检测 if (Input.GetMouseButtonDown(0)) { …...
增强现实(AR)在广告中的力量
The Power of AR in Advertising 写在前面 增强现实(AR -Augmented Reality)是指借助软件、应用程序和智能手机、平板电脑或耳机等设备,为日常生活添加视觉和音频元素的技术。如今,品牌和广告商可以在营销活动中使用AR࿰…...

日志收集监控告警平台的选型思考
目前市面上比较常见的日志收集系统有:ELK,Grafana Loki,OpenObserve,SigNoz,Graylog ,Syslog-ng,Highlight,接下来我会对这几个一一做分析。 1. ELK ELK 是 Elasticsearch、Logsta…...

苹果Find My产品需求增长迅速,伦茨科技ST17H6x芯片供货充足
苹果的Find My功能使得用户可以轻松查找iPhone、Mac、AirPods以及Apple Watch等设备。如今Find My还进入了耳机、充电宝、箱包、电动车、保温杯等多个行业。苹果发布AirTag发布以来,大家都更加注重物品的防丢,苹果的 Find My 就可以查找 iPhone、Mac、Ai…...
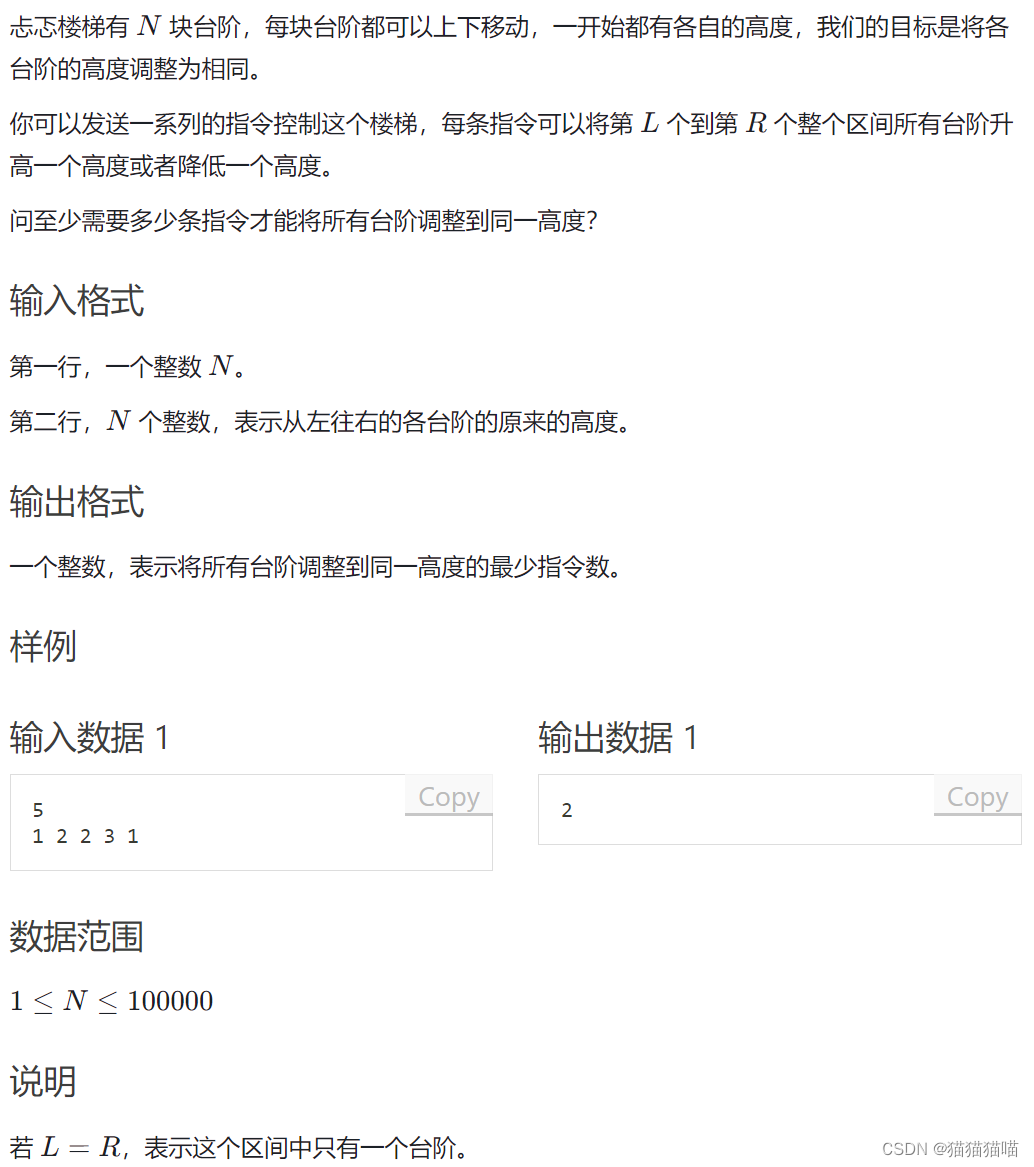
题目:忐忑楼梯Ⅱ
问题描述: 解题思路: 利用差分,当第一个以后的差分元素都为零时就代表楼梯高度等于第一个楼梯的高度。为什么是第一个呢,因为以第一个为标准的区间操作数最少。 注意点:每次都只能加一或减一,ans开ll 题解&…...
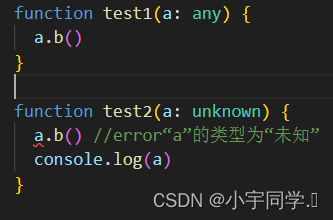
TS函数类型
函数类型表达式 function hello(x: string) {console.log(x) } //greeter函数的参数是一个函数fn,fn也有一个string类型参数,无返回值。 function greeter(fn: (a: string) > void) {fn(hello) } greeter(hello)也可以把定义参数类型的语句单独提取出…...
:数据链路层协议)
数据链路层(四):数据链路层协议
目录 1 数据链路层协议1.1 异步协议1.2 同步协议1.3 局域网数据链路层协议1.4 广域网数据链路层协议 1 数据链路层协议 数据链路层“协议”也称为“规程”,数据链路控制协议也称数据链路控制规程。 数据链路控制协议主要分为异步协议和同步协议两大类。 1.1 异步协…...
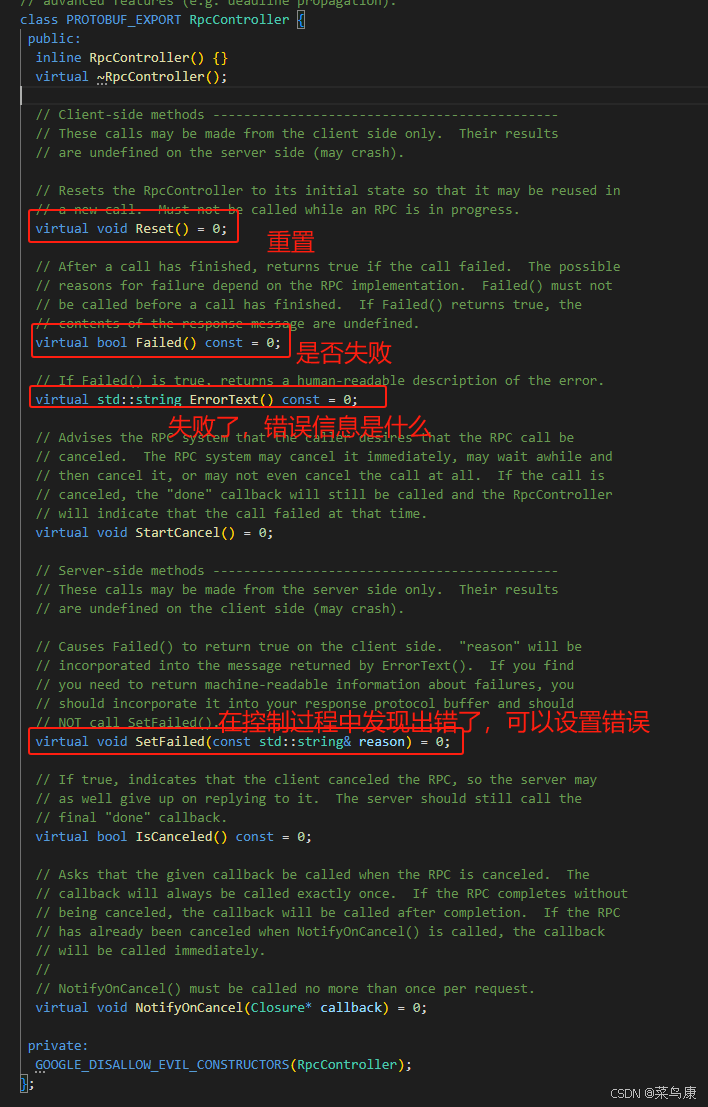
C++实现分布式网络通信框架RPC(3)--rpc调用端
目录 一、前言 二、UserServiceRpc_Stub 三、 CallMethod方法的重写 头文件 实现 四、rpc调用端的调用 实现 五、 google::protobuf::RpcController *controller 头文件 实现 六、总结 一、前言 在前边的文章中,我们已经大致实现了rpc服务端的各项功能代…...

MySQL 隔离级别:脏读、幻读及不可重复读的原理与示例
一、MySQL 隔离级别 MySQL 提供了四种隔离级别,用于控制事务之间的并发访问以及数据的可见性,不同隔离级别对脏读、幻读、不可重复读这几种并发数据问题有着不同的处理方式,具体如下: 隔离级别脏读不可重复读幻读性能特点及锁机制读未提交(READ UNCOMMITTED)允许出现允许…...
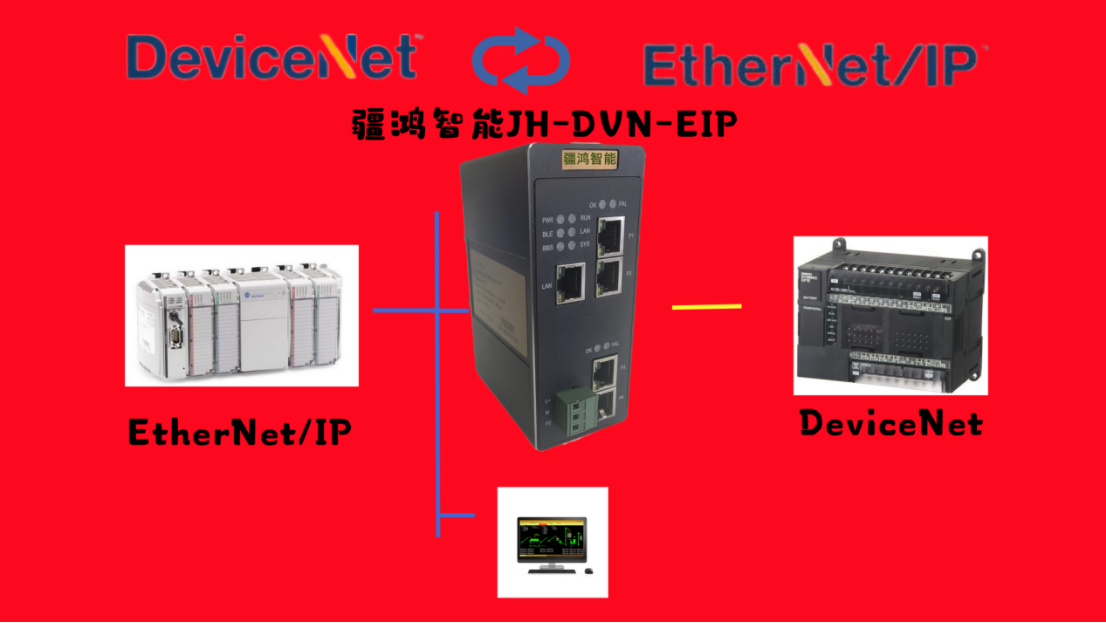
EtherNet/IP转DeviceNet协议网关详解
一,设备主要功能 疆鸿智能JH-DVN-EIP本产品是自主研发的一款EtherNet/IP从站功能的通讯网关。该产品主要功能是连接DeviceNet总线和EtherNet/IP网络,本网关连接到EtherNet/IP总线中做为从站使用,连接到DeviceNet总线中做为从站使用。 在自动…...

OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别
OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别 直接训练提示词嵌入向量的核心区别 您提到的代码: prompt_embedding = initial_embedding.clone().requires_grad_(True) optimizer = torch.optim.Adam([prompt_embedding...

图表类系列各种样式PPT模版分享
图标图表系列PPT模版,柱状图PPT模版,线状图PPT模版,折线图PPT模版,饼状图PPT模版,雷达图PPT模版,树状图PPT模版 图表类系列各种样式PPT模版分享:图表系列PPT模板https://pan.quark.cn/s/20d40aa…...
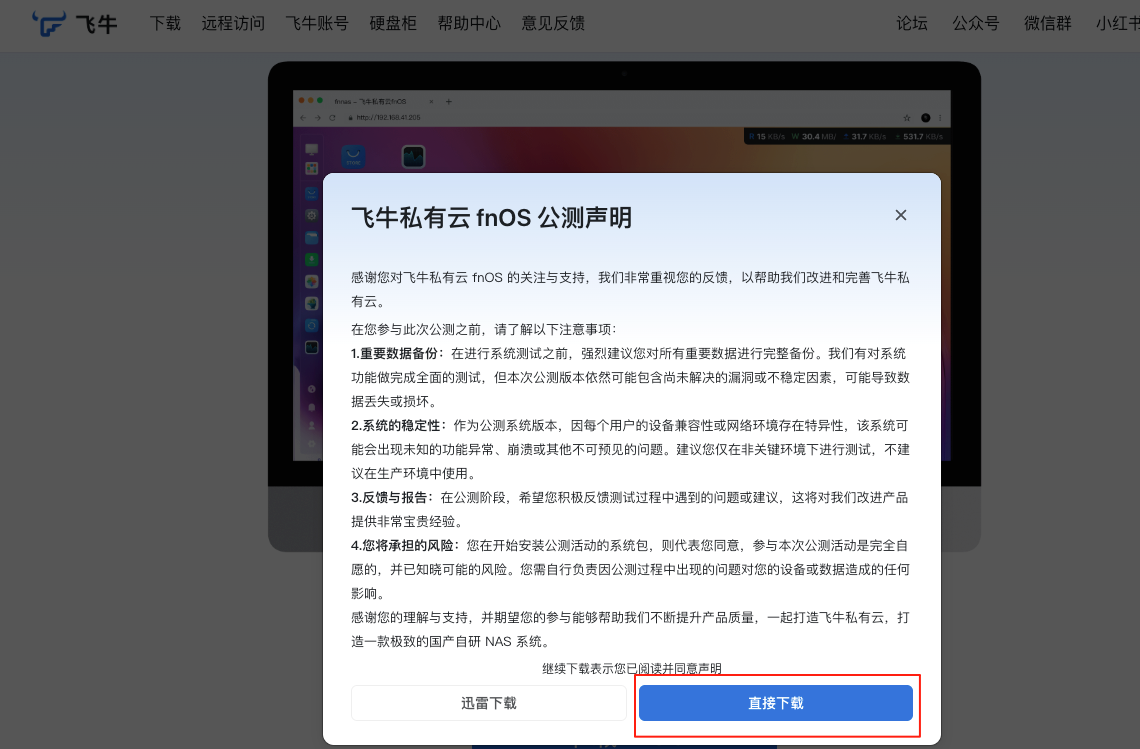
群晖NAS如何在虚拟机创建飞牛NAS
套件中心下载安装Virtual Machine Manager 创建虚拟机 配置虚拟机 飞牛官网下载 https://iso.liveupdate.fnnas.com/x86_64/trim/fnos-0.9.2-863.iso 群晖NAS如何在虚拟机创建飞牛NAS - 个人信息分享...

Unity UGUI Button事件流程
场景结构 测试代码 public class TestBtn : MonoBehaviour {void Start(){var btn GetComponent<Button>();btn.onClick.AddListener(OnClick);}private void OnClick(){Debug.Log("666");}}当添加事件时 // 实例化一个ButtonClickedEvent的事件 [Formerl…...
)
Leetcode33( 搜索旋转排序数组)
题目表述 整数数组 nums 按升序排列,数组中的值 互不相同 。 在传递给函数之前,nums 在预先未知的某个下标 k(0 < k < nums.length)上进行了 旋转,使数组变为 [nums[k], nums[k1], …, nums[n-1], nums[0], nu…...

redis和redission的区别
Redis 和 Redisson 是两个密切相关但又本质不同的技术,它们扮演着完全不同的角色: Redis: 内存数据库/数据结构存储 本质: 它是一个开源的、高性能的、基于内存的 键值存储数据库。它也可以将数据持久化到磁盘。 核心功能: 提供丰…...
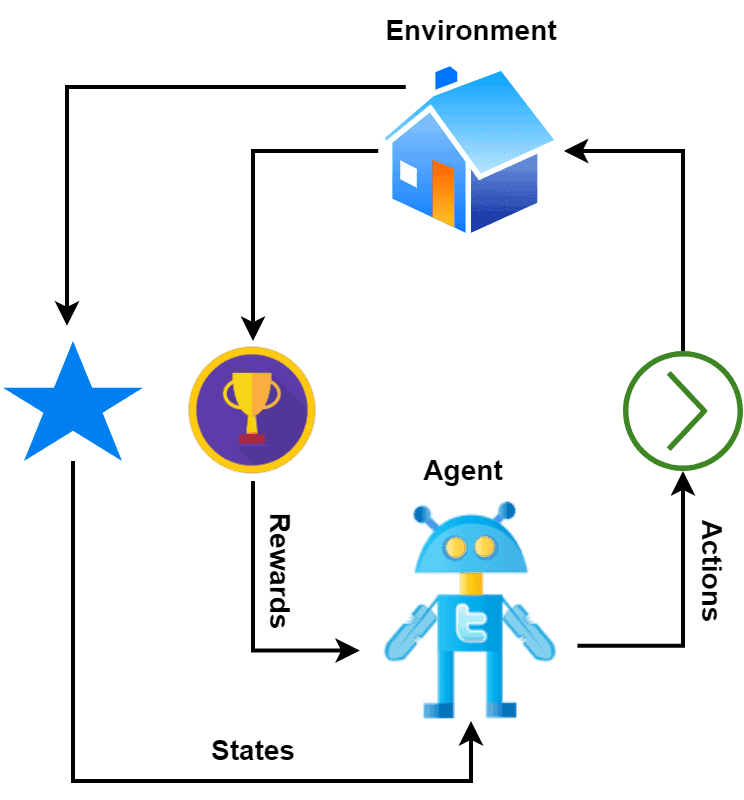
【深度学习新浪潮】什么是credit assignment problem?
Credit Assignment Problem(信用分配问题) 是机器学习,尤其是强化学习(RL)中的核心挑战之一,指的是如何将最终的奖励或惩罚准确地分配给导致该结果的各个中间动作或决策。在序列决策任务中,智能体执行一系列动作后获得一个最终奖励,但每个动作对最终结果的贡献程度往往…...