相机标定学习记录
相机标定是计算机视觉和机器视觉领域中的一项基本技术,它的主要目的是通过获取相机的内部参数(内参)和外部参数(外参),以及镜头畸变参数,建立起现实世界中的点与相机成像平面上对应像素点之间准确的位置关系。
基本原理
相机标定的基本原理是通过一系列的数学变换和几何模型,将现实世界中的三维坐标点(世界坐标系)转换为相机成像平面上的二维坐标点(图像坐标系)。
坐标系转换
- 世界坐标系:现实世界中的点用三维坐标表示。
- 相机坐标系:以相机光心为原点的三维坐标系。
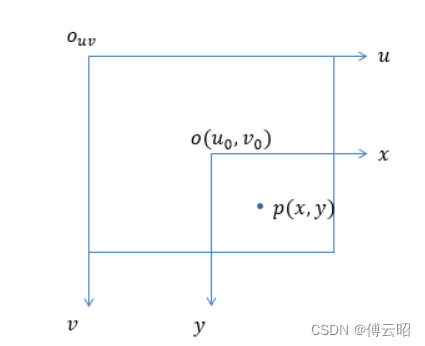
- 成像平面坐标系(图像坐标系):在相机坐标系中,通过成像平面上的点来表示图像中的点。
- 像素坐标系:在成像平面坐标系的基础上,进一步考虑像素的尺寸,以像素为单位。
数学模型
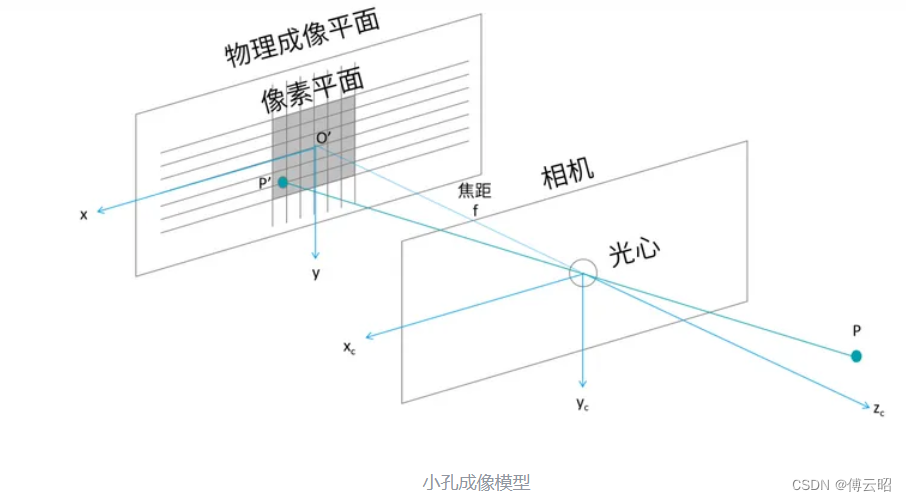
相机标定的数学模型通常基于小孔成像模型。该模型假设光线是直线,且相机内没有畸变。
一个典型的相机标定过程包括以下步骤:
- 建立几何关系:使用一个已知尺寸的标定板(如棋盘格)放置在相机前不同的位置和角度,获取多个视角的图像。
- 特征提取:从每个图像中提取出标定板的角点,这些角点在标定板上的位置是已知的(世界坐标系)。
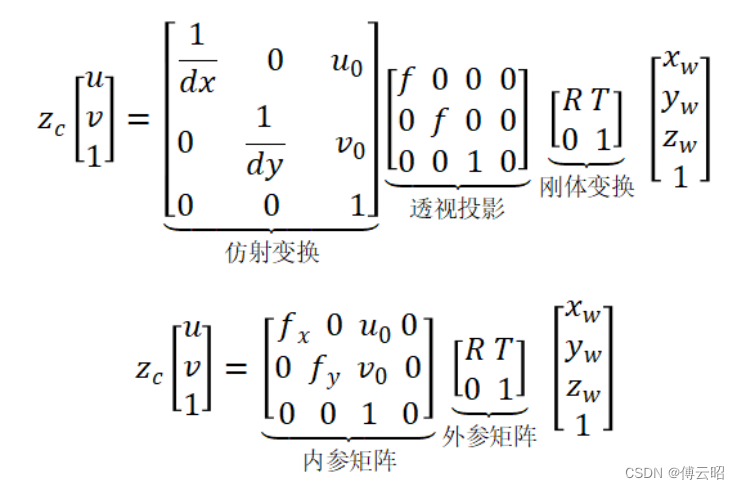
- 坐标转换:利用相机的内参(焦距、主点等)和外参(相机相对于标定板的位置和方向),以及畸变参数,将世界坐标系中的点转换为像素坐标系中的点。
- 参数估计:通过最小化重投影误差(实际图像点与通过模型计算得到的图像点之间的差异),使用优化算法(如最小二乘法)来求解相机参数。

相机参数
- 内参:焦距(f)、主点(c_x, c_y)、成像平面与相机坐标系之间的比例因子(s)。
- 外参:描述相机在世界坐标系中的位置和方向,由旋转矩阵(R)和平移向量(t)组成。
- 畸变参数:由于镜头制造和安装的原因,实际成像与理想成像存在偏差,这包括径向畸变(k_1, k_2, k_3)和切向畸变(p_1, p_2)。
标定的目的
- 畸变校正:通过校正镜头畸变,生成更接近真实世界的图像。
- 三维重建:在已知相机参数的情况下,可以从多个图像中重构出物体的三维结构。
步骤
1. 准备标定板
- 标定板:通常使用具有明显特征的图案,如黑白相间的棋盘格或圆点图案。
- 尺寸:标定板的实际尺寸需要已知,以便于后续转换计算。
2. 拍摄标定图像
- 使用相机拍摄多张标定板在不同角度和位置的照片。确保标定板在每张照片中至少有一部分是可见的。
3. 特征提取
- 从每个图像中提取标定板的特征点(如棋盘格的角点)。
4. 建立世界坐标系与图像坐标系的关系
- 世界坐标系:假设标定板平面为世界坐标系的XOY平面,标定板上的点可以精确测量。
举例
假设我们有一个10x7的棋盘格,每个格子的大小是1cm x 1cm。
- 世界坐标系:以棋盘格的左上角为原点(0,0,0),每个格子的角点可以按照厘米给出坐标。
5. 相机参数初始化
- 首先需要估计相机参数的初始值,这可以通过一些基本假设来完成,例如假设相机的焦距、主点位于图像中心等。
6. 参数优化
- 使用最小化重投影误差的方法(如张氏标定法、Levenberg-Marquardt算法等)来优化相机参数。
- 重投影误差是指实际观察到的图像点与通过当前相机参数计算得到的图像点之间的差异。
7. 畸变校正
- 一旦获得了相机的内参和畸变参数,就可以对图像进行畸变校正。
举例
- 假设相机由于镜头原因产生了径向畸变,我们可以通过畸变参数来校正图像,使得图像中的直线看起来更加直线。
张氏标定法
张氏标定法(Zhang's Method)是由张正友博士在1998年提出的一种高效且实用的相机标定方法。该方法使用一个平面棋盘格作为标定图案,通过从不同角度拍摄多张图像来标定相机的内参和外参。以下是张氏标定法的基本步骤:
-
准备标定板:使用一个平面棋盘格作为标定图案,棋盘格上的角点坐标是已知的。
-
拍摄标定图像:从不同角度和位置拍摄多张标定板的图像。确保标定板在每张图像中至少有一部分是可见的。
-
提取角点坐标:从每个图像中提取标定板的角点坐标。这些坐标是图像坐标。
-
建立世界坐标系与图像坐标系的关系:假设标定板平面为世界坐标系的XOY平面,标定板上的点可以精确测量。因此,可以建立标定板上的点在世界坐标系和图像坐标系之间的对应关系。
-
初始化相机参数:首先估计相机的内参(焦距、主点等)和外参(相机在世界坐标系中的位置和方向)的初始值。
-
优化相机参数:使用优化算法(如Levenberg-Marquardt算法)最小化重投影误差,即实际观测到的图像点与通过当前相机参数计算得到的图像点之间的差异。通过多次迭代优化,不断调整相机参数,直到重投影误差最小。
-
畸变校正:一旦获得了相机的内参和畸变参数,就可以对图像进行畸变校正。
张氏标定法具有以下优点:
- 高效:只需使用一个平面棋盘格作为标定图案,拍摄多张图像即可。
- 实用:不需要精确知道相机与标定板之间的位姿关系,只需从不同角度拍摄图像即可。
- 精度高:通过优化算法可以精确估计相机的内参和畸变参数。
- 鲁棒性:对于图像质量、光照条件等变化具有较强的鲁棒性。
因此,张氏标定法被广泛应用于相机标定领域,成为计算机视觉和机器人导航等领域的重要技术。
具体步骤详述
a. 特征提取
- 使用OpenCV等计算机视觉库,可以检测出棋盘格的角点。
- 例如,使用OpenCV的
findChessboardCorners()函数。
b. 构建映射关系
- 对于每一张标定图像,提取出的角点在世界坐标系中的位置是已知的。
- 使用相机内参和外参将这些点映射到图像坐标系。
c. 参数优化
- 使用优化算法(如OpenCV中的
calibrateCamera()函数)来计算相机参数。 - 这个过程会最小化所有标定图像上的重投影误差。
d. 畸变校正
- 使用
undistort()函数和计算出的内参、畸变参数来校正图像。
通过以上步骤,我们可以获得一个准确的相机模型,这个模型可以用于后续的视觉任务,如三维重建、机器人导航等。相机标定是一个精确且系统的过程,它要求在标定过程中尽可能减少误差,以确保标定结果的准确性。
为什么至少两张图才能测量内参?
相机内参的测量需要至少两张图的原因在于,单个视角的图像无法提供足够的信息来唯一确定相机的内参。以下是详细解释:
-
单一视角的局限性:单张图像只能提供一个视角下的信息,无法提供关于相机内参的完整信息。例如,无法确定焦距、主点位置等参数。
-
缺乏深度信息:单张图像无法提供深度信息,因为缺乏其他视角的比较。这使得无法准确判断图像中点的真实位置和大小。
-
几何约束不足:为了准确估计内参,需要多个视角下的图像点来建立几何约束。这些约束有助于确定相机内参,如焦距和主点位置。
-
重投影误差最小化:内参的估计通常涉及最小化重投影误差,即实际观测到的图像点与通过内参计算得到的理论图像点之间的差异。这需要多个视角下的图像点来提供足够的数据点。
-
非线性优化:内参的估计通常涉及非线性优化过程,这个过程需要多个数据点来稳定和收敛到全局最小值。
-
畸变参数估计:畸变参数的估计也需要多个视角,因为畸变会随着图像中的位置变化而变化。
因此,为了准确估计相机的内参,通常需要至少两张图像,从不同视角捕捉同一标定板。这些图像提供了多个视角下的信息,有助于建立几何约束,并最小化重投影误差,从而估计出相机的内参。
为什么一般建议拍很多张来进行标定?
在相机内参标定中,一般建议拍摄多张标定板图像,原因如下:
-
提高准确性:更多的图像意味着更多的数据点,这有助于提高内参估计的准确性。每个图像提供了独特的视角,有助于更好地约束内参的估计。
-
减少噪声影响:单张图像可能受到噪声、光照变化等因素的影响。通过拍摄多张图像,可以从多个视角观察标定板,从而平均这些随机误差,提高标定结果的稳定性。
-
增加覆盖范围:多张图像可以提供更全面的覆盖范围,包括标定板的不同部分和不同方向。这有助于捕捉相机的内参在不同条件下的表现。
-
改善优化过程:在最小化重投影误差的优化过程中,更多的数据点有助于算法更好地收敛到全局最优解,并减少陷入局部最优解的风险。
-
畸变估计:畸变参数的估计尤其需要多张图像,因为畸变会随着图像中的位置变化而变化。多张图像可以提供更多关于畸变的分布信息。
-
验证和交叉检验:多张图像可以用来验证和交叉检验标定结果。通过比较不同图像中的标定板点,可以确保内参估计的一致性和准确性。
-
鲁棒性:在实际应用中,相机可能会遇到各种不同的场景和光照条件。拍摄多张图像有助于提高标定结果的鲁棒性,使其在各种条件下都能保持准确性。
因此,为了获得更准确、更稳定的相机内参估计,通常建议拍摄多张标定板图像,最好涵盖不同的视角、位置和光照条件。这样可以确保标定结果在实际应用中的有效性和可
 从棋盘格--》像素坐标,需要左乘相机外参和内参。
从棋盘格--》像素坐标,需要左乘相机外参和内参。
单应性(Homography)变换。可以简单的理解为它用来描述物体在世界坐标系和像素坐标系之间的位置映射关系。对应的变换矩阵称为单应性矩阵。
单应矩阵=相机内参*外参
假设两张图像中的对应点对齐次坐标为(x',y',1)和(x,y,1),单应矩阵H定义为:
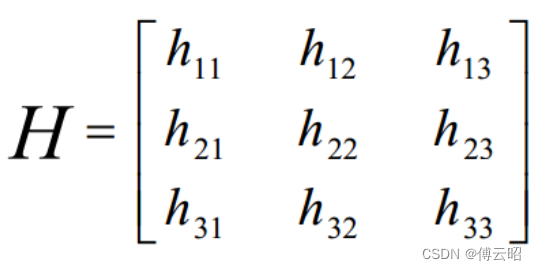
由于单应矩阵H包含了||H||=1约束,因此根据线性方程组,8自由度的H我们至少需要4对对应的点才能计算出单应矩阵。 这也回答了前面图像校正中提到的为何至少需要4个点对的根本原因。
但是,以上只是理论推导,在真实的应用场景中,我们计算的点对中都会包含噪声。比如点的位置偏差几个像素,甚至出现特征点对误匹配的现象,如果只使用4个点对来计算单应矩阵,那会出现很大的误差。因此,为了使得计算更精确,一般都会使用远大于4个点对来计算单应矩阵。另外上述方程组采用直接线性解法通常很难得到最优解,所以实际使用中一般会用其他优化方法,如奇异值分解、Levenberg-Marquarat(LM)算法等进行求解。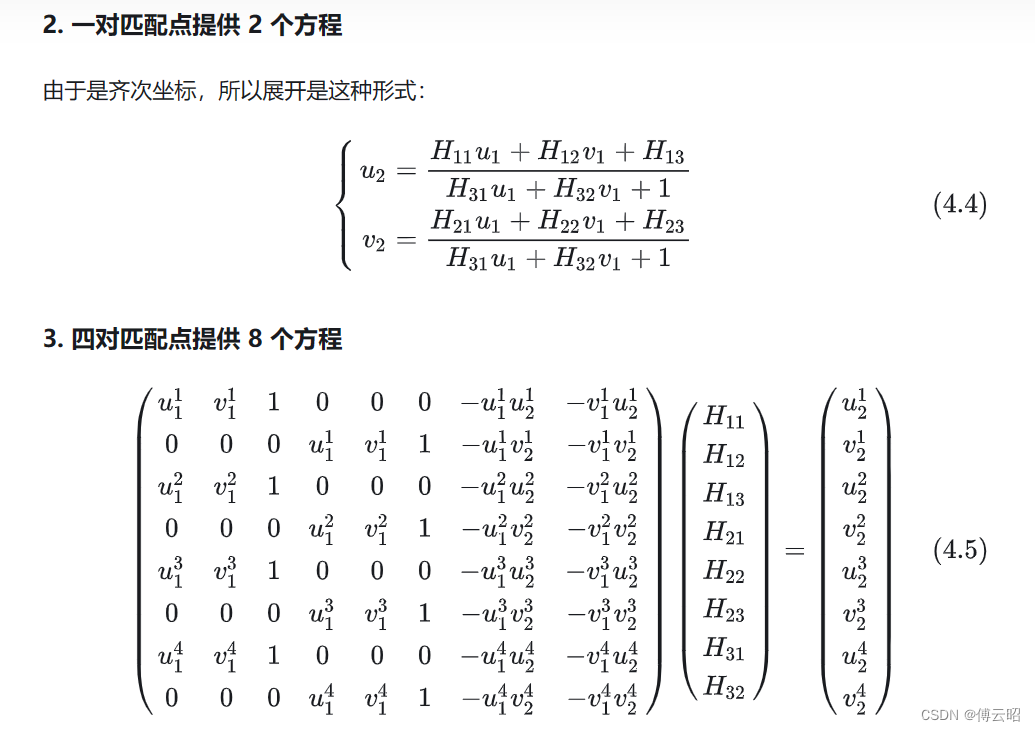
因为棋盘标定图纸中所有角点的空间坐标是已知的,这些角点对应在拍摄的标定图片中的角点的像素坐标也是已知的,如果我们得到这样的N>=4个匹配点对(越多计算结果越鲁棒),就可以根据LM等优化方法得到其单应矩阵H。
本质上:已经知道多组2D-3D对应点的关系,计算单应矩阵H解从而获取相机内参K,通过最小化重投影误差来获取相机最佳内参。当最后迭代出一个内参K后,不同的2D-3D对应点的重投影误差是不一样的,去掉大的,保留小的,然后继续拍照,重复循环。
参考:
张正友标定法-完整学习笔记-从原理到实战 - 知乎 (zhihu.com)
相关文章:
相机标定学习记录
相机标定是计算机视觉和机器视觉领域中的一项基本技术,它的主要目的是通过获取相机的内部参数(内参)和外部参数(外参),以及镜头畸变参数,建立起现实世界中的点与相机成像平面上对应像素点之间准…...

CSS 滚动条样式修改
1、滚动条整体部分 使用 ::-webkit-scrollbar 注意:这个必须要加,不然修改的样式不生效 ::-webkit-scrollbar {width: 10px;//修改滚动条宽度 }2、滚动条中的滑块 使用 ::-webkit-scrollbar-thumb ::-webkit-scrollbar-thumb {border-radius: 8px;b…...
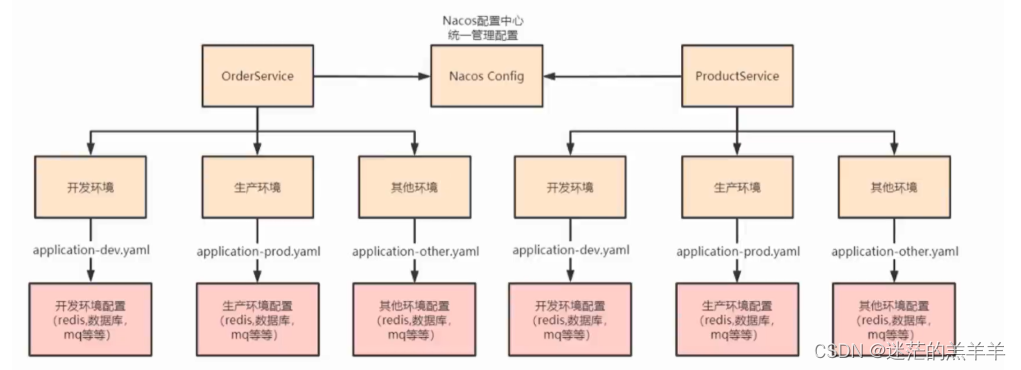
谈谈配置中心?
配置中心可以做集中式的服务配置管理,比如配置一些数据库连接的URL,一些共用的配置且可动态调整的参数。如果不采用集中式的管理,会导致修改起来特别麻烦,一个个的修改特别繁琐。 Nacos Config配置中心中采用的是客户端拉取数据&a…...
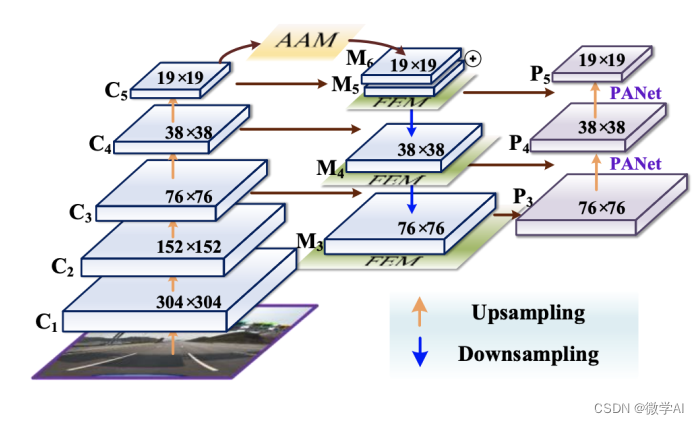
人工智能(pytorch)搭建模型25-基于pytorch搭建FPN特征金字塔网络的应用场景,模型结构介绍
大家好,我是微学AI,今天给大家介绍一下人工智能(pytorch)搭建模型25-基于pytorch搭建FPN特征金字塔网络的应用场景,模型结构介绍。特征金字塔网络(FPN)是一种深度学习模型结构,主要应用于目标检测任务中&am…...
JRT业务开发起步
这是一段充满挑战与奋斗的旅程,自第一行Java代码的写下起,便历经重重险阻。从细微的代码行,逐步汇聚成实用的工具类方法;从工具类方法的积累,逐渐构建起功能强大的工具包;再从工具包的整合,最终…...

深度解析:国内主流音视频产品的核心功能与市场表现
前言 当前音视频开发领域呈现出多样化竞争态势,其中声网(Agora)、即构(ZEGO)等云通讯企业占据了市场的主导地位。随着技术的持续进步和用户需求的日益多样化,选择音视频服务提供商的标准也越来越个性化&am…...
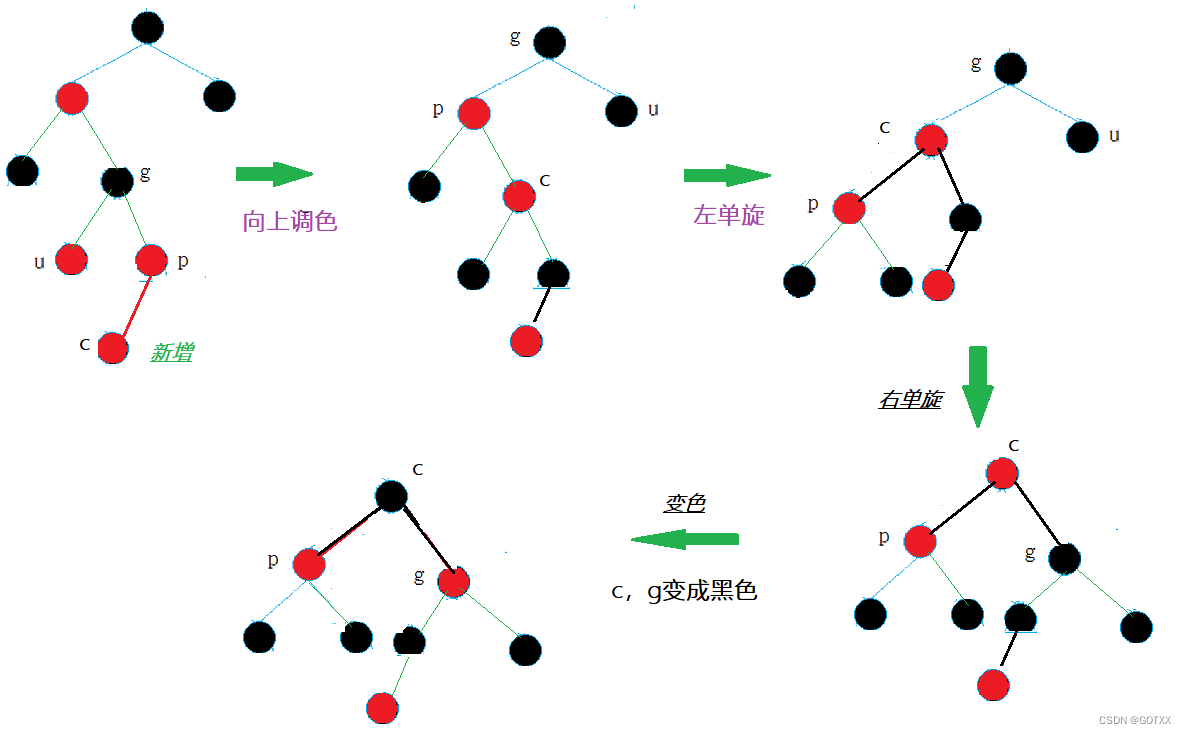
红黑树介绍及插入操作的实现
🎉个人名片: 🐼作者简介:一名乐于分享在学习道路上收获的大二在校生 🙈个人主页🎉:GOTXX 🐼个人WeChat:ILXOXVJE 🐼本文由GOTXX原创,首发CSDN&…...

[linux初阶][vim-gcc-gdb] TwoCharter: gcc编译器
目录 一.Linux中gcc编译器的下载与安装 二.使用gcc编译器来翻译 C语言程序 ①.编写C语言代码 ②翻译C语言代码 a.预处理 b.编译 c.汇编 d.链接 ③.执行Main 二进制可执行程序(.exe文件) 三.总结 一.Linux中gcc编译器的下载与安装 使用yum命令(相当于手机上的应用…...
)
单例设计模式(2)
单例设计模式(2) 单例模式存在的问题 单例对 OOP 特性的支持不友好 oop的特性:封装、继承、多态、抽象;以Id生成器代码为例,如果未来某一天,我们希望针对不同的业务采用不同的 ID 生成算法。比如&#x…...
队列支持)
boost::asio 启用 io_uring(Linux 5.10)队列支持
欲启用 boost::asio 对于 io_uring 的支持,这需要以下几个先决条件; 1、boost 1.78 及以上发行版本 Revision History - 1.78.0 (boost.org) 2、Linux kernel 5.10 及以上发行版本 3、在预定义头文件(stdafx.h)、或编译器预定义…...
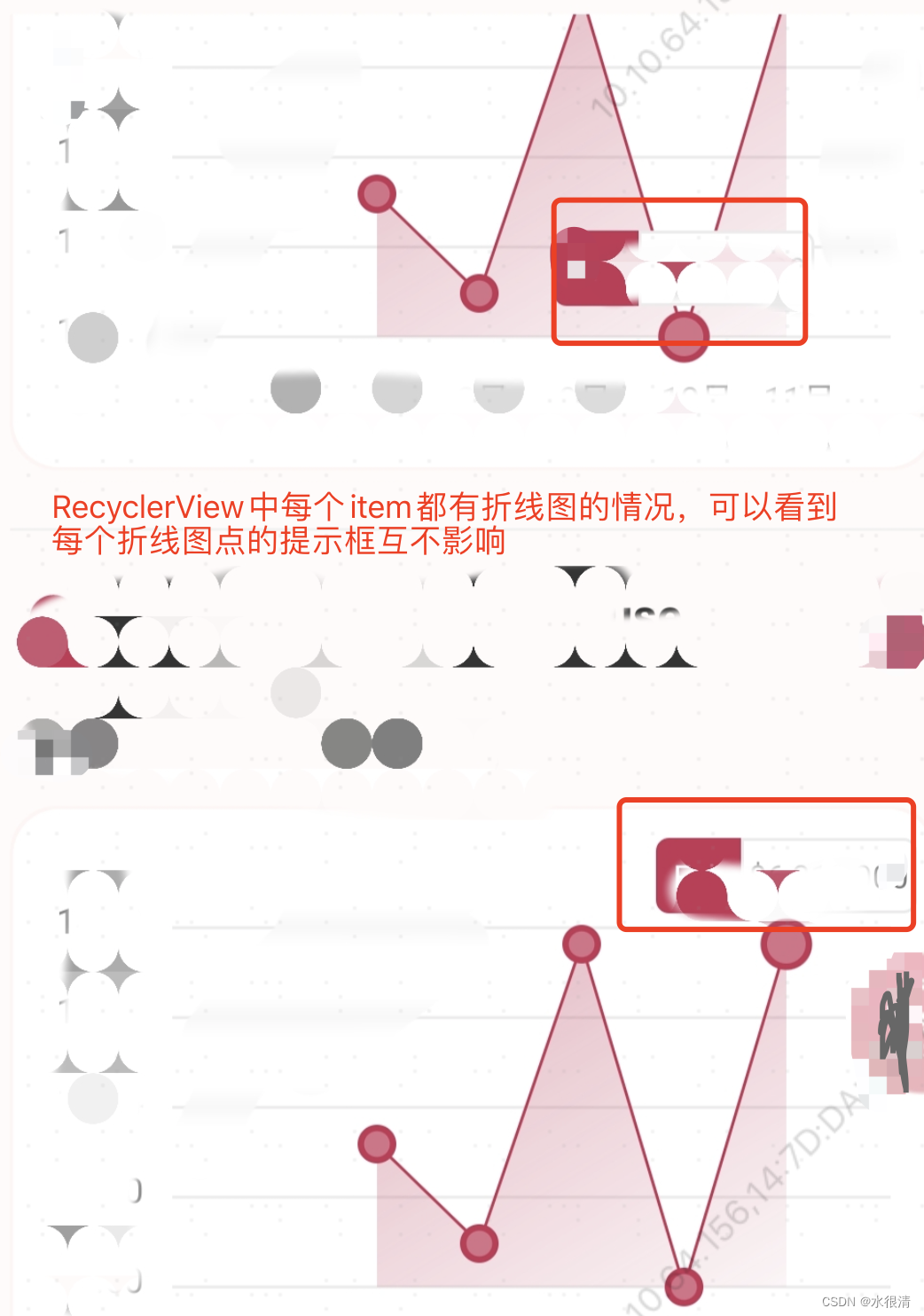
Android 自定义坐标曲线图(二)
Android 自定义坐标曲线图_android 自定义曲线图-CSDN博客 继上一篇文章,点击折线图上的点,显示提示信息进行修改,之前通过回调,调用外部方法,使用popupwindow或dialog来显示,但是这种方法对于弹框显示的位…...

每日OJ题_子序列dp⑧_力扣446. 等差数列划分 II - 子序列
目录 力扣446. 等差数列划分 II - 子序列 解析代码 力扣446. 等差数列划分 II - 子序列 446. 等差数列划分 II - 子序列 难度 困难 给你一个整数数组 nums ,返回 nums 中所有 等差子序列 的数目。 如果一个序列中 至少有三个元素 ,并且任意两个相邻…...

GOPROXY 代理设置
通常报错: 1.http: server gave HTTP response to HTTPS client 2.timeout 解决指令:(会话临时性),长久的可以在配置文件中配置 go env -w GOPROXYhttps://goproxy.cn,direct 长久的,在~/.bashrc文件中添加: expo…...

Redis面经
Redis面经 Redis缓存穿透、缓存击穿和缓存雪崩及解决方案概述缓存穿透详解及解决方案缓存击穿详解及解决方案缓存雪崩详解及解决方案 Redis持久化机制什么是数据持久化?Redis数据持久化概述RDB持久化的优缺点AOF持久化混合持久化 Redis缓存穿透、缓存击穿和缓存雪崩…...
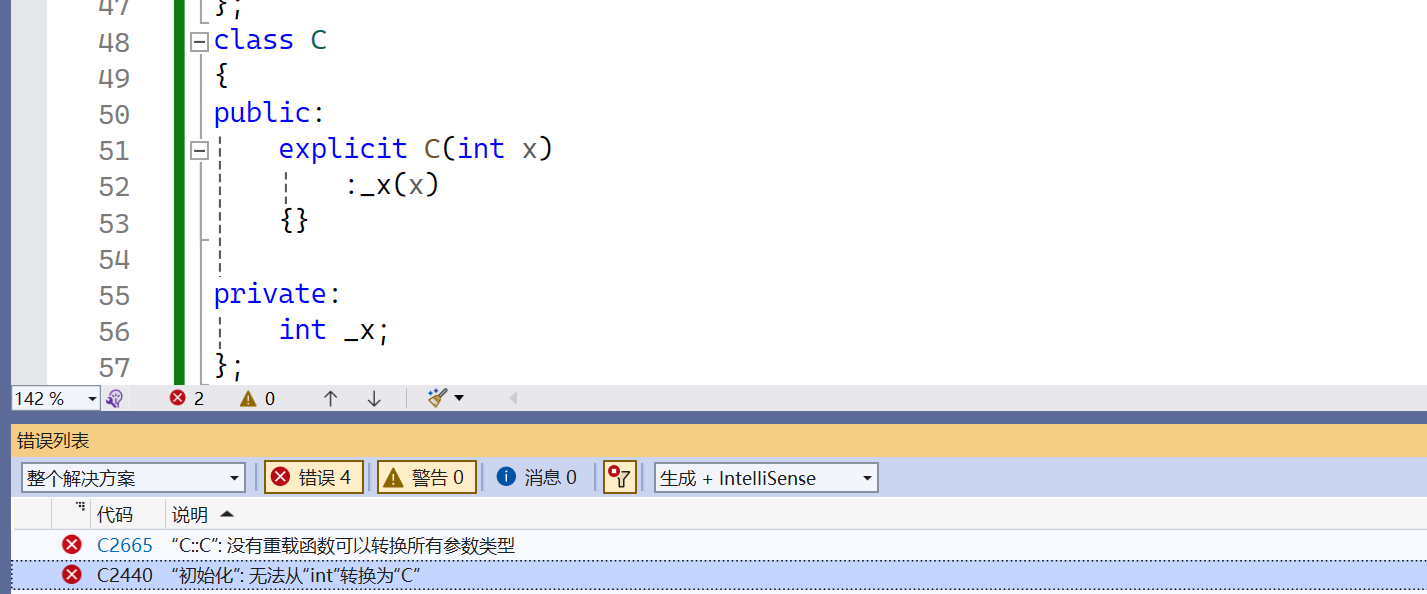
【c++】类和对象(六)深入了解隐式类型转换
🔥个人主页:Quitecoder 🔥专栏:c笔记仓 朋友们大家好,本篇文章我们来到初始化列表,隐式类型转换以及explicit的内容 目录 1.初始化列表1.1构造函数体赋值1.2初始化列表1.2.1隐式类型转换与复制初始化 1.3e…...

什么是nginx正向代理和反向代理?
什么是代理? 代理(Proxy), 简单理解就是自己做不了的事情或实现不了的功能,委托别人去做。 什么是正向代理? 在nginx中,正向代理指委托者是客户端,即被代理的对象是客户端 在这幅图中,由于左边内网中…...

【Go】面向萌新的Gin框架知识梳理学习笔记
目录 Gin框架简介 路由&路由组 1. 定义基本路由 2. 参数传递 3. 查询字符串参数 4. 路由组 5. 路由中间件 模板渲染 1. 加载模板 2. 定义模板 3. 渲染模板 4. 自定义模板函数 返回json 1. 导入 Gin 包 2. 创建 Gin 引擎 3. 定义路由和处理器函数 4. 运行服…...

baseDao增删改查.
这里写目录标题 1、baseDao增删改查介绍2、basDao类3、BasDao类的作用 1、baseDao增删改查介绍 (1)、增加Create)操作: 通过BaseDao的insert方法可以向数据库中插入一条新的记录。 该方法接受一个实体对象作参数,将该对象的属性映射到表的字…...

什么是面向对象【大白话Java面试题】
什么是面向对象 同样是解决一个问题,面向对象的角度是将问题抽象成对象的形式。通过分类的思维方式,将问题分成几个解决方案的对象。给每个对象赋值属性和方法,对每个对象的细节进行面向过程的思维,执行自己的方法来解决问题。 …...
PyTorch 教程-快速上手指南
文章目录 PyTorch Quickstart1.处理数据2.创建模型3.优化模型参数4.保存模型5.加载模型 PyTorch 基础入门1.Tensors1.1初始化张量1.2张量的属性1.3张量运算1.3.1张量的索引和切片1.3.2张量的连接1.3.3算术运算1.3.4单元素张量转变为Python数值 1.4Tensor与NumPy的桥接1.4.1Tens…...

DeepSeek 赋能智慧能源:微电网优化调度的智能革新路径
目录 一、智慧能源微电网优化调度概述1.1 智慧能源微电网概念1.2 优化调度的重要性1.3 目前面临的挑战 二、DeepSeek 技术探秘2.1 DeepSeek 技术原理2.2 DeepSeek 独特优势2.3 DeepSeek 在 AI 领域地位 三、DeepSeek 在微电网优化调度中的应用剖析3.1 数据处理与分析3.2 预测与…...
MMaDA: Multimodal Large Diffusion Language Models
CODE : https://github.com/Gen-Verse/MMaDA Abstract 我们介绍了一种新型的多模态扩散基础模型MMaDA,它被设计用于在文本推理、多模态理解和文本到图像生成等不同领域实现卓越的性能。该方法的特点是三个关键创新:(i) MMaDA采用统一的扩散架构…...

基于Docker Compose部署Java微服务项目
一. 创建根项目 根项目(父项目)主要用于依赖管理 一些需要注意的点: 打包方式需要为 pom<modules>里需要注册子模块不要引入maven的打包插件,否则打包时会出问题 <?xml version"1.0" encoding"UTF-8…...

代码随想录刷题day30
1、零钱兑换II 给你一个整数数组 coins 表示不同面额的硬币,另给一个整数 amount 表示总金额。 请你计算并返回可以凑成总金额的硬币组合数。如果任何硬币组合都无法凑出总金额,返回 0 。 假设每一种面额的硬币有无限个。 题目数据保证结果符合 32 位带…...
详细解析)
Caliper 负载(Workload)详细解析
Caliper 负载(Workload)详细解析 负载(Workload)是 Caliper 性能测试的核心部分,它定义了测试期间要执行的具体合约调用行为和交易模式。下面我将全面深入地讲解负载的各个方面。 一、负载模块基本结构 一个典型的负载模块(如 workload.js)包含以下基本结构: use strict;/…...

CVPR2025重磅突破:AnomalyAny框架实现单样本生成逼真异常数据,破解视觉检测瓶颈!
本文介绍了一种名为AnomalyAny的创新框架,该方法利用Stable Diffusion的强大生成能力,仅需单个正常样本和文本描述,即可生成逼真且多样化的异常样本,有效解决了视觉异常检测中异常样本稀缺的难题,为工业质检、医疗影像…...
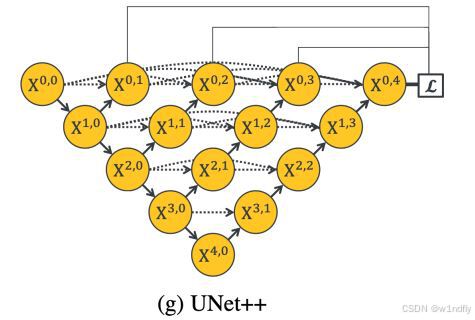
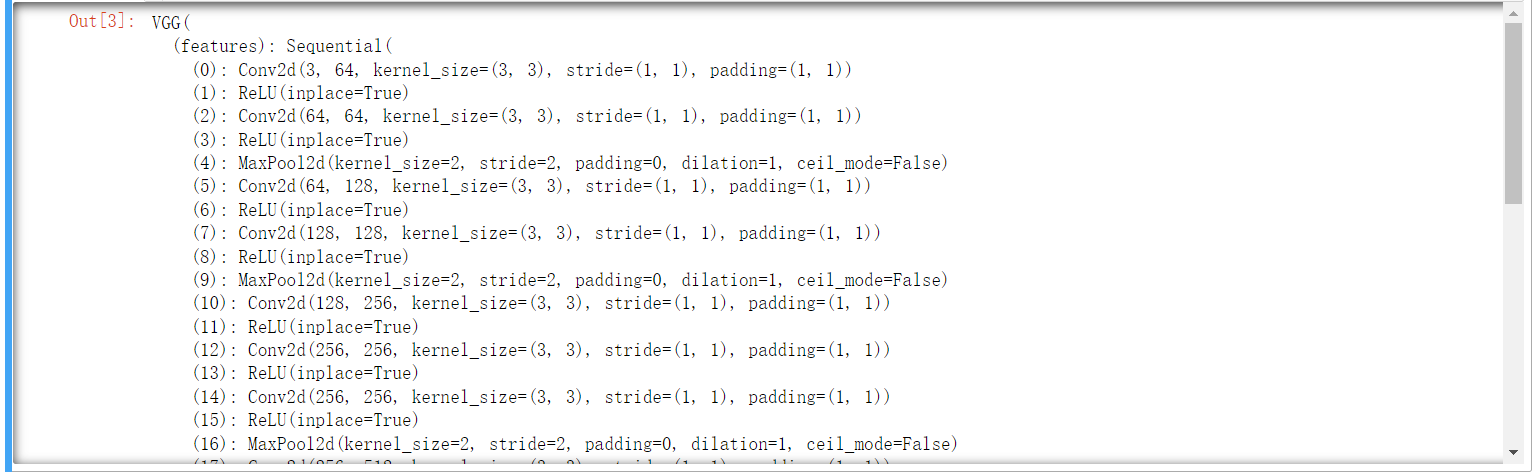
nnUNet V2修改网络——暴力替换网络为UNet++
更换前,要用nnUNet V2跑通所用数据集,证明nnUNet V2、数据集、运行环境等没有问题 阅读nnU-Net V2 的 U-Net结构,初步了解要修改的网络,知己知彼,修改起来才能游刃有余。 U-Net存在两个局限,一是网络的最佳深度因应用场景而异,这取决于任务的难度和可用于训练的标注数…...
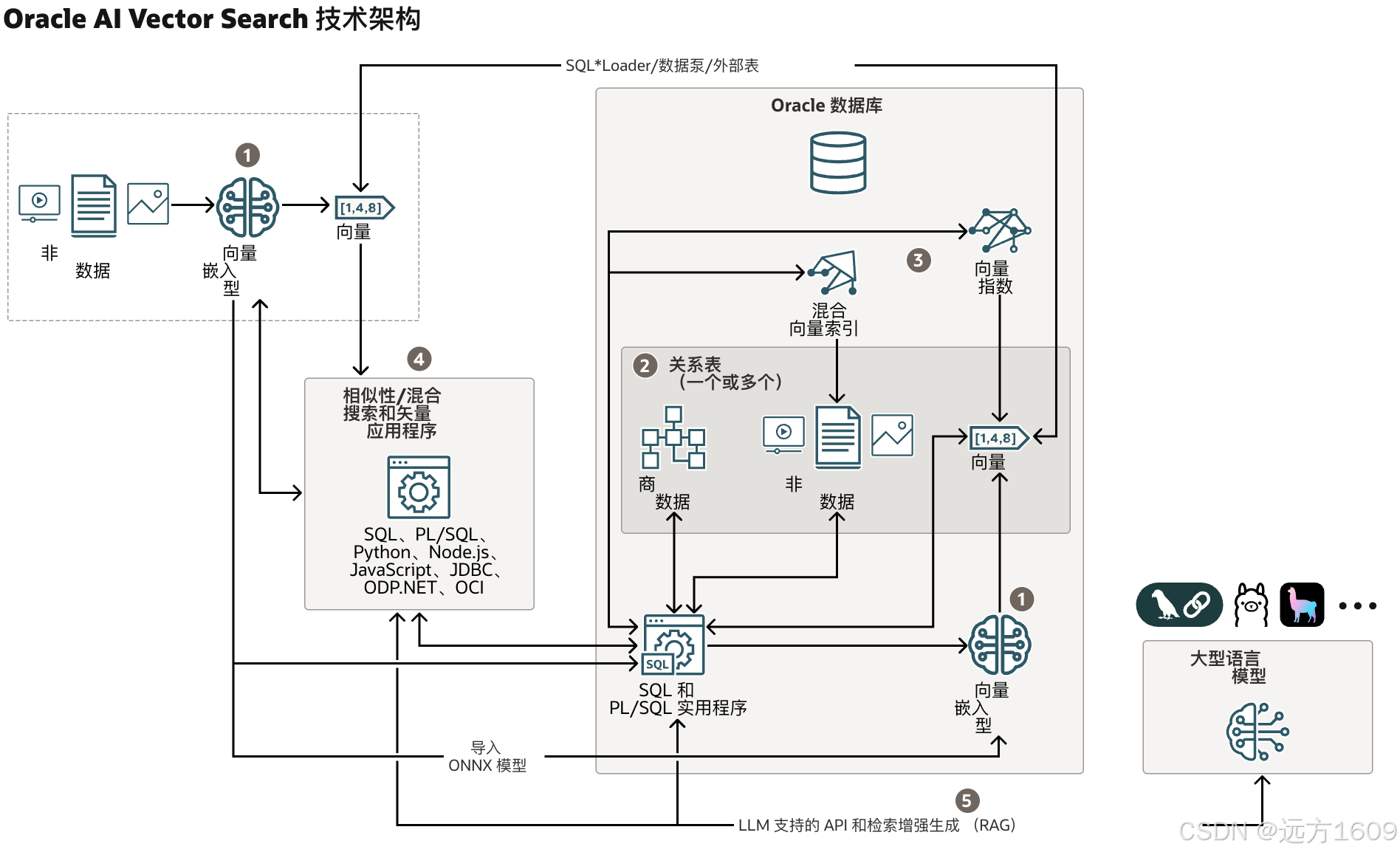
9-Oracle 23 ai Vector Search 特性 知识准备
很多小伙伴是不是参加了 免费认证课程(限时至2025/5/15) Oracle AI Vector Search 1Z0-184-25考试,都顺利拿到certified了没。 各行各业的AI 大模型的到来,传统的数据库中的SQL还能不能打,结构化和非结构的话数据如何和…...
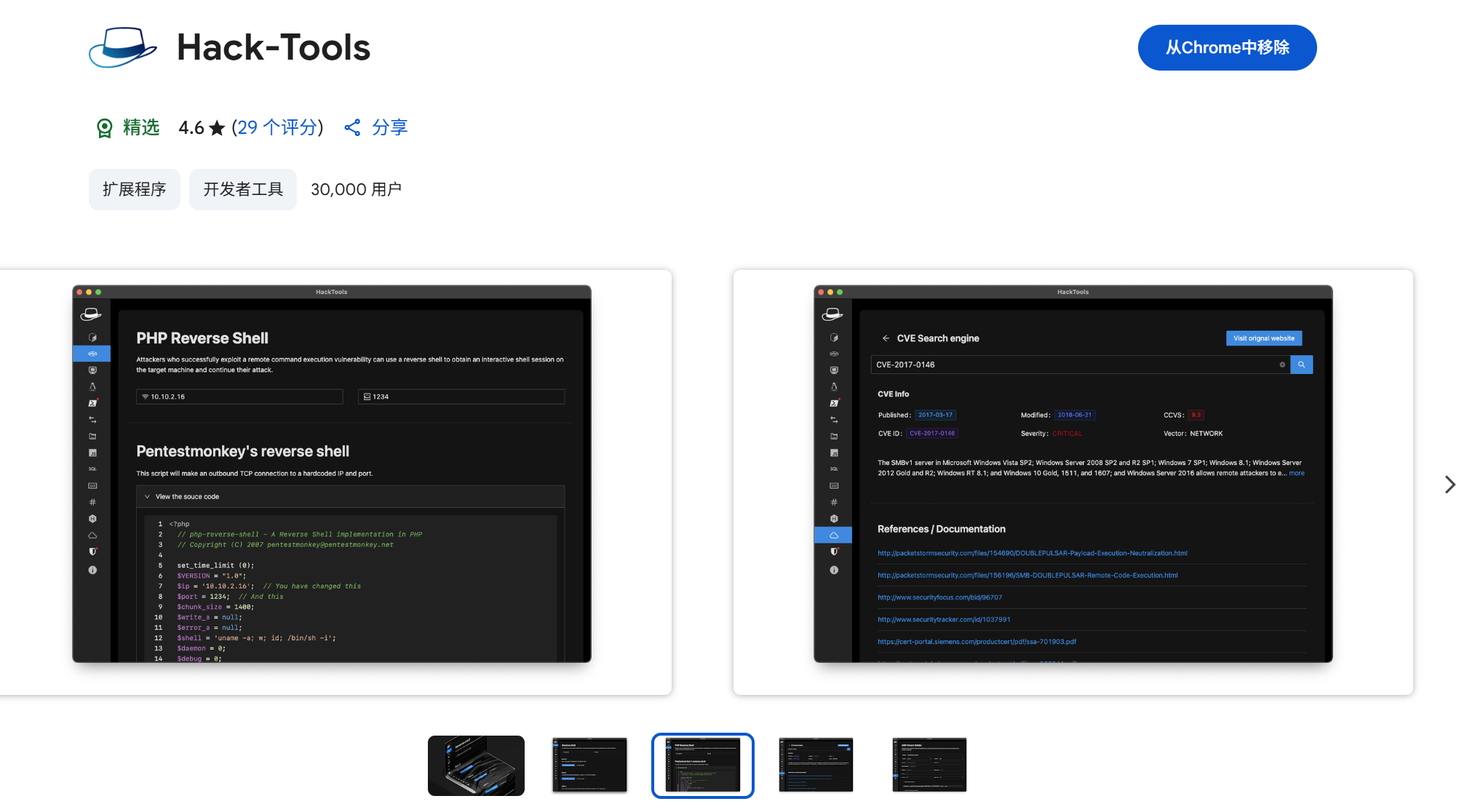
一些实用的chrome扩展0x01
简介 浏览器扩展程序有助于自动化任务、查找隐藏的漏洞、隐藏自身痕迹。以下列出了一些必备扩展程序,无论是测试应用程序、搜寻漏洞还是收集情报,它们都能提升工作流程。 FoxyProxy 代理管理工具,此扩展简化了使用代理(如 Burp…...
Spring AOP代理对象生成原理
代理对象生成的关键类是【AnnotationAwareAspectJAutoProxyCreator】,这个类继承了【BeanPostProcessor】是一个后置处理器 在bean对象生命周期中初始化时执行【org.springframework.beans.factory.config.BeanPostProcessor#postProcessAfterInitialization】方法时…...