1.3 字符设备驱动
1、字符设备驱动工作原理

2、file_operations结构体
struct file_operations { struct module *owner; //拥有该结构的模块的指针,一般为THIS_MODULES loff_t (*llseek) (struct file *, loff_t, int); //用来修改文件当前的读写位置 ssize_t (*read) (struct file *, char __user *, size_t, loff_t *); //从设备中同步读取数据 ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *); //向设备发送数据 ssize_t (*aio_read) (struct kiocb *, const struct iovec *, unsigned long, loff_t); //初始化一个异步的读取操作 ssize_t (*aio_write) (struct kiocb *, const struct iovec *, unsigned long, loff_t); //初始化一个异步的写入操作 int (*readdir) (struct file *, void *, filldir_t); //仅用于读取目录,对于设备文件,该字段为NULL unsigned int (*poll) (struct file *, struct poll_table_struct *); //轮询函数,判断目前是否可以进行非阻塞的读写或写入 int (*ioctl) (struct inode *, struct file *, unsigned int, unsigned long); //执行设备I/O控制命令 long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long); //不使用BLK文件系统,将使用此种函数指针代替ioctl long (*compat_ioctl) (struct file *, unsigned int, unsigned long); //在64位系统上,32位的ioctl调用将使用此函数指针代替 int (*mmap) (struct file *, struct vm_area_struct *); //用于请求将设备内存映射到进程地址空间 int (*open) (struct inode *, struct file *); //打开 int (*flush) (struct file *, fl_owner_t id); int (*release) (struct inode *, struct file *); //关闭 int (*fsync) (struct file *, struct dentry *, int datasync); //刷新待处理的数据 int (*aio_fsync) (struct kiocb *, int datasync); //异步刷新待处理的数据 int (*fasync) (int, struct file *, int); //通知设备FASYNC标志发生变化 int (*lock) (struct file *, int, struct file_lock *); ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int); unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long); int (*check_flags)(int); int (*flock) (struct file *, int, struct file_lock *); ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int); ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int); int (*setlease)(struct file *, long, struct file_lock **);
}; 3、注册字符设备驱动
向内核注册字符设备,也就是在内核中登记,让内核中分配一个设备号,标识该驱动。
(1)在Linux内核2.4版本前注册字符设备驱动的方式:
// 申请注册设备号以第一个参数来辨别动态与静态。
//1、如果第一个参数是0,表示动态的分配给此驱动程序一个主设备号,
//2、非零时候,表示备驱动程序向系统申请主设备号,
static inline int register_chrdev(unsigned int major, const char *name, const struct file_operations *fops)
{return __register_chrdev(major, 0, 256, name, fops);
}//主设备号必须和注册时候的主设备号一致,如果注册时候是动态的分配的主设备号,就需要保存起来
static inline void unregister_chrdev(unsigned int major, const char *name)
{__unregister_chrdev(major, 0, 256, name);
}(2)在Linux内核2.6版本后注册字符设备驱动的方式:
设备号申请
//静态申请
/*************************************
* from:注册的指定起始设备编号
* count:需要连续注册的次设备编号个数
* name:字符设备名称
*************************************/
int register_chrdev_region(dev_t from, unsigned count, const char *name);//动态申请
/******************************************************
* dev: 存放起始设备编号的指针
* baseminor:次设备号基地址
* count:需要连续注册的次设备编号个数
* name:字符设备名称
*******************************************************/
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count,const char *name);//注销设备号
void unregister_chrdev_region(dev_t from, unsigned count);注册设备驱动
//MKDEV:将主设备号和次设备号转换成dev_t类型
struct cdev
{struct kobject kobj;struct module *owner; //所属模块const struct file_operations *ops;struct list_head list; //与 cdev 对应的字符设备文件的 inode->i_devices 的链表头dev_t dev; //起始设备编号,可以通过MAJOR(),MINOR()来提取主次设备号unsigned int count; //连续注册次设备号的个数
}
//通过宏定义来获取主、次设备号
MAJOR(dev_t dev)
MINOR(dev_t dev)//通过主、次设备号生成dev_t
MKDEV(int major,int minor) //初始化,建立cdev和file_operation 之间的连接
void cdev_init(struct cdev *, const struct file_operations *); //动态申请一个cdev内存
struct cdev *cdev_alloc(void); //释放
void cdev_put(struct cdev *p); //注册设备
int cdev_add(struct cdev *, dev_t, unsigned); //注销设备
void cdev_del(struct cdev *);4、应用和内核之间的数据交换
/*************************************************
*to:目标地址(用户空间)
*from:源地址(内核空间)
*n:将要拷贝数据的字节数
*返回:成功返回0,失败返回没有拷贝成功的数据字节数
**************************************************/
unsigned long copy_to_user(void *to, const void *from, unsigned long n);/*************************************************
*to:目标地址(内核空间)
*from:源地址(用户空间)
*n:将要拷贝数据的字节数
*返回:成功返回0,失败返回没有拷贝成功的数据字节数
**************************************************/
unsigned long copy_from_user(void *to, const void *from, unsigned long n);5、简单的字符设备驱动示例
#include <linux/module.h> //module_init() module_exit()
#include <linux/init.h> //__init __exitstatic int module_test_open(struct inode *inode, struct file *file)
{return 0;
}static int module_test_release(struct inode *inode, struct file *file)
{return 0;
}//应用层和驱动之间的数据交换,copy_from_user:从用户空间复制到内核空间,copy_to_user:从内核空间复制到用户空间
static ssize_t module_test_read(struct file *file, char __user *buf, size_t count, loff_t *ppos)
{char kBuf[1024] = "module_test_read";int ret = copy_to_user(ubuf, kBuf, count);if (ret == 0)printk(KERN_DEBUG, "copy_to_user success");return count;
}
static ssize_t module_test_write(struct file *file, const char __user *ubuf, size_t count, loff_t *ppos)
{char kBuf[1024];int ret = copy_from_user(kBuf, ubuf, count);if (ret == 0)printk(KERN_DEBUG, "copy_from_user success");return count;
}struct file_operations module_test_fops =
{.owner = THIS_MODULE,.read = module_test_read,.write = module_test_write,.open = module_test_open,.release = module_test_realse,
};//__init是一个宏定义,#define __init xxx,作用是编译时,将__init修饰的
//函数放入.init.text中,内核启动时会统一加载.init.text段,加载后释放
static int __init chrdev_module_init(void)
{//printk是内核源码中用来打印信息的函数,KERN_DEBUG是打印级别printk(KERN_DEBUG "chrdev_module_init");//注册字符设备驱动register_chrdev(200, "module_test", &module_test_fops);return 0;
}static void __exit chrdev_module_exit(void)
{printk(KERN_DEBUG "chrdev_module_exit");//注销字符设备驱动unregister_chrdev(200, "module_test");
}module_init(chrdev_module_init);
module_exit(chrdev_module_exit);//宏定义
MODULE_LICENSE("GPL") //模块的许可证
MODULE_AUTHOR("xy_L") //模块的作者
MODULE_DESCIPTION("chrdev module") //模块的描述
MODULE_ALIAS("module_test") //模块的别名6、查看Linux系统已经注册的驱动设备号
cat /proc/devices7、驱动设备文件的创建
设备文件的关键信息:设备号 = 主设备号 + 次设备号,使用mknod创建设备文件:
mknod /dev/xxx c 主设备号 次设备号
相关文章:
1.3 字符设备驱动
1、字符设备驱动工作原理 2、file_operations结构体 struct file_operations { struct module *owner; //拥有该结构的模块的指针,一般为THIS_MODULES loff_t (*llseek) (struct file *, lof…...

计算机毕业设计springboot小区物业报修管理系统m8x57
该物业报修管理系统实施的目的在于帮助物业管理企业升级员工管理、住户管理、报修问题管理等内部管理平台,整合物业管理企业物力和人力,全面服务于维修人员管理的内部管理需求,并重视需求驱动、管理创新、与业主交流等外部需求,通过物业管理企业各项资源…...
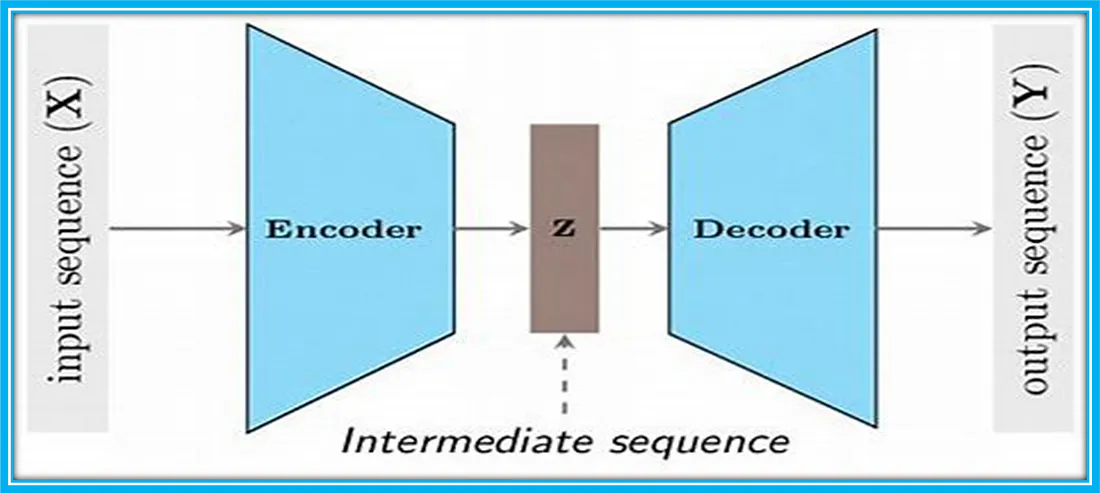
深度学习体系结构——CNN, RNN, GAN, Transformers, Encoder-Decoder Architectures算法原理与应用
1. 卷积神经网络 卷积神经网络(CNN)是一种特别适用于处理具有网格结构的数据,如图像和视频的人工神经网络。可以将其视作一个由多层过滤器构成的系统,这些过滤器能够处理图像并从中提取出有助于进行预测的有意义特征。 设想你手…...

js 数字的常用方法梳理
toFixed:保留几位小数。toFixed(保留小数位)。注意:不做任何的四舍五入。 Math集合: random:获取一个0-1之间的随机数。注意,包含0,不包含1。 round:四舍五入取整数,最后返回一个整数值。 ceil:向上取整。 floor:…...

STM32H743VIT6使用STM32CubeMX通过I2S驱动WM8978(5)
接前一篇文章:STM32H743VIT6使用STM32CubeMX通过I2S驱动WM8978(4) 本文参考以下文章及视频: STM32CbueIDE Audio播放音频 WM8978 I2S_stm32 cube配置i2s录音和播放-CSDN博客 STM32第二十二课(I2S,HAL&am…...
4.10)
Objective-C学习笔记(block,协议)4.10
1.block:是一个数据类型,存储一段代码,代码可以有参数有返回值。 2.声明block: 返回值类型 (^block变量名称)(参数列表); int (^myblock) (int num1,int num2); 代码段格式:^返回值类型(参数列表){ 代码段 }; int (^m…...

AD7982BRMZRL7 二进制 500kSPS 模数转换芯片 ADI
AD7982BRMZRL7是一款由Analog Devices(亚德诺)公司生产的18位逐次逼近型模数转换器(ADC)。它主要用于将模拟信号转换为数字信号,适用于数据采集系统、嵌入式系统、工业控制和医疗设备等领域。 AD7982BRMZRL7的主要功能…...
采集某新闻网资讯网站保存PDF
网址:融资总额近3亿美元、药明康德押注,这家抗衰老明星公司有何过人之处-36氪 想要抓取文章内容,但是找不到啊,可能是文字格式的问题,也可能文章内容进行了加密。 在元素中查看,window.initialState返回的就…...

03攻防世界-unserialize3
根据题目可以看出,这是个反序列化的题目 打开网址观察题目可以看到这里是php的代码,那么也就是php的反序列化 本题需要利用反序列化字符串来进行解题,根据源码提示我们需要构造code。 序列化的意思是:是将变量转换为可保存或传输…...

蓝桥杯备考随手记: 常见的二维数组问题
在Java中,二维数组是一种可以存储多个元素的数据结构。它由多个一维数组组成,这些一维数组可以看作是行和列的组合,形成了一个矩阵。 1. 二维数组旋转问题 二维数组的旋转是指将数组中的元素按照一定规则进行旋转。通常有两种常见的旋转方式…...
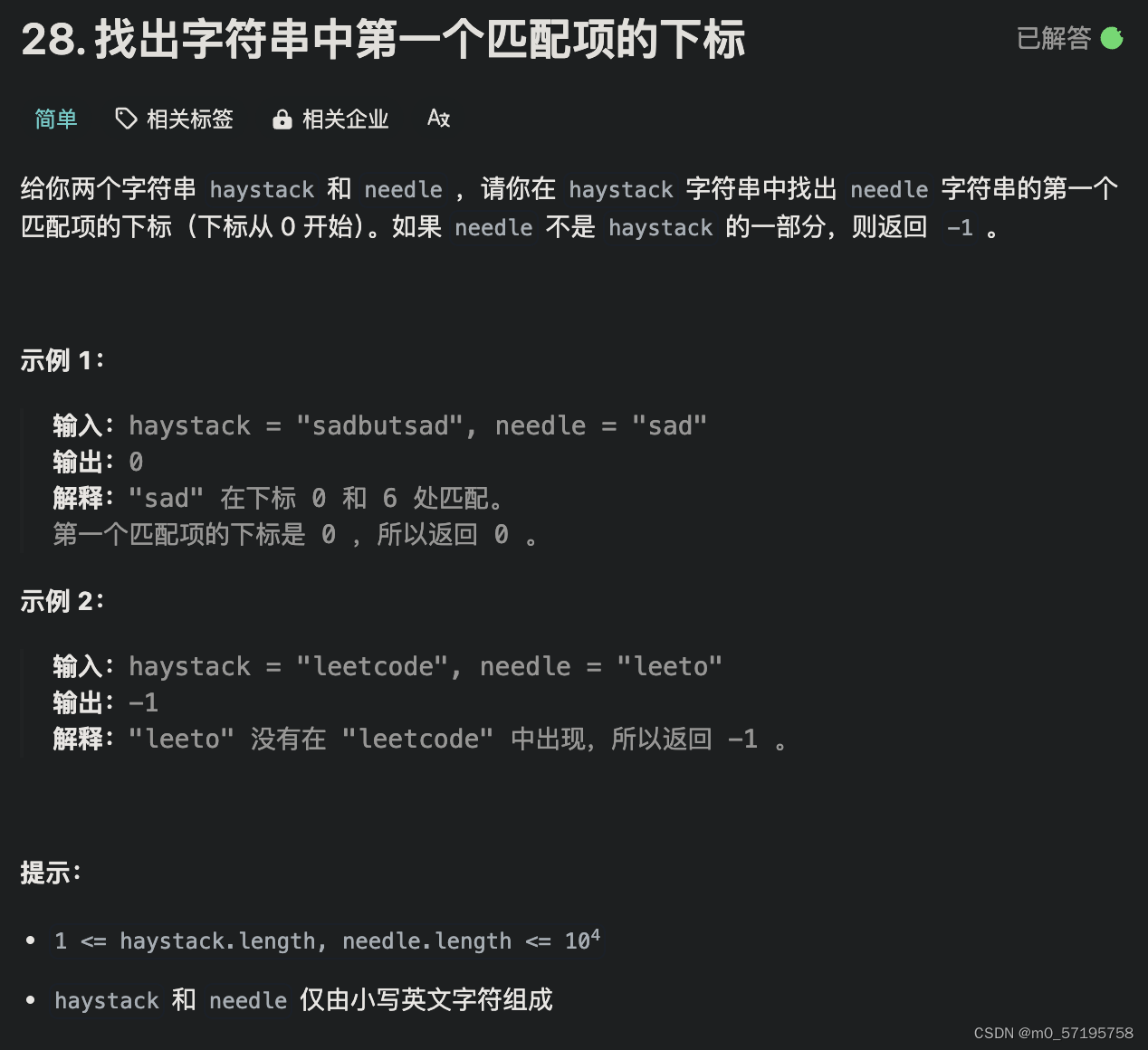
Java | Leetcode Java题解之第28题找出字符串中第一个匹配项的下标
题目: 题解: class Solution {public int strStr(String haystack, String needle) {int n haystack.length(), m needle.length();if (m 0) {return 0;}int[] pi new int[m];for (int i 1, j 0; i < m; i) {while (j > 0 && needl…...

【数据结构与算法】:二叉树经典OJ
目录 1. 二叉树的前序遍历 (中,后序类似)2. 二叉树的最大深度3. 平衡二叉树4. 二叉树遍历 1. 二叉树的前序遍历 (中,后序类似) 这道题的意思是对二叉树进行前序遍历,把每个结点的值都存入一个数组中,并且返回这个数组。 思路&…...

uniapp——长按识别二维码
说明 转变思路,长按图片,进入预览图片,这时候再长按就可以了。 <view class"codeMain"><view class"codeWhite" longpress"handleLongPress(i.image(qrcode))"><image :src"i.image(qrc…...
云服务器环境web环境搭建之JDK、redis、mysql
一、Linux安装jdk,手动配置环境 链接: https://pan.baidu.com/s/1LRgRC5ih7B9fkc588uEQ1whttps://pan.baidu.com/s/1LRgRC5ih7B9fkc588uEQ1w 提取码: 0413 tar -xvf 压缩包名 修改配置文件/etc/profile 二、安装redis环境 方案一: Linux下安装配置r…...

第1章 计算机网络体系结构
王道学习 【考纲内容】 (一)计算机网络概述 计算机网络的概念、组成与功能;计算机网络的分类; 计算机网络的性能指标 (二)计算机网络体系结构与参考模型 计算机网络分层结…...
Docker之自定义镜像上传至阿里云
一、Alpine介绍 Alpine Linux是一个轻量级的Linux发行版,专注于安全、简单和高效。它采用了一个小巧的内核和基于musl libc的C库,使得它具有出色的性能和资源利用率。 Alpine Linux的主要特点包括: 小巧轻量:Alpine Linux的安装…...
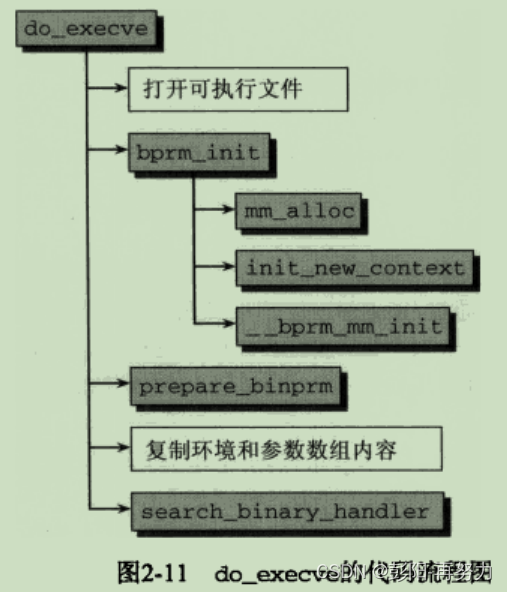
《深入Linux内核架构》第2章 进程管理和调度 (2)
目录 2.4 进程管理相关的系统调用 2.4.1 进程复制 2.4.2 内核线程 2.4.3 启动新程序 2.4.4 退出进程 本专栏文章将有70篇左右,欢迎关注,订阅后续文章。 2.4 进程管理相关的系统调用 2.4.1 进程复制 1. _do_fork函数 fork vfork clone都最终调用_…...
PostgreSQL的psql命令)
(四)PostgreSQL的psql命令
PostgreSQL的psql命令 基础信息 OS版本:Red Hat Enterprise Linux Server release 7.9 (Maipo) DB版本:16.2 pg软件目录:/home/pg16/soft pg数据目录:/home/pg16/data 端口:5777psql 是 PostgreSQL 数据库的命令行界面…...

前端使用minio传输文件
minio官方文档 minio-js可以支持ts。 安装完可能会出现 Can‘t import the named export ‘xxx‘ from non EcmaScript module (only default export is available)可以尝试降低minio的版本 npm install minio7.0.18 --save代码: 初始化 const Minio require(…...

[大模型] BlueLM-7B-Chat WebDemo 部署
BlueLM-7B-Chat WebDemo 部署 模型介绍 BlueLM-7B 是由 vivo AI 全球研究院自主研发的大规模预训练语言模型,参数规模为 70 亿。BlueLM-7B 在 C-Eval 和 CMMLU 上均取得领先结果,对比同尺寸开源模型中具有较强的竞争力(截止11月1号)。本次发布共包含 7…...

突破二维限制:开源工具ImageToSTL实现图片转3D模型全攻略
突破二维限制:开源工具ImageToSTL实现图片转3D模型全攻略 【免费下载链接】ImageToSTL This tool allows you to easily convert any image into a 3D print-ready STL model. The surface of the model will display the image when illuminated from the left sid…...

Singularity安全性详解:如何在容器中保持用户权限不变的终极指南
Singularity安全性详解:如何在容器中保持用户权限不变的终极指南 【免费下载链接】singularity Singularity has been renamed to Apptainer as part of us moving the project to the Linux Foundation. This repo has been persisted as a snapshot right before …...

Filament Shield 策略生成器:自动化权限策略开发完全指南
Filament Shield 策略生成器:自动化权限策略开发完全指南 【免费下载链接】filament-shield The easiest and most intuitive way to add access management to your Filament Panel; Resources, Pages & Widgets through spatie/laravel-permission 项目地址…...

UEFI固件分析工具:深度解析与定制指南
UEFI固件分析工具:深度解析与定制指南 【免费下载链接】UEFITOOL28 项目地址: https://gitcode.com/gh_mirrors/ue/UEFITOOL28 UEFI固件(统一可扩展固件接口,用于初始化硬件的底层软件)分析是系统安全与硬件定制的关键环节…...

零代码部署:文墨共鸣水墨风语义分析平台快速搭建指南
零代码部署:文墨共鸣水墨风语义分析平台快速搭建指南 1. 水墨与AI的完美邂逅 在数字化浪潮中,我们常常被冰冷的代码和机械的界面所包围。文墨共鸣(Wen Mo Gong Ming)项目带来了一股清流——它将前沿的AI语义分析技术与传统的中国…...

如何快速实现FastAPI国际化:多语言支持完整指南
如何快速实现FastAPI国际化:多语言支持完整指南 【免费下载链接】fastapi FastAPI framework, high performance, easy to learn, fast to code, ready for production 项目地址: https://gitcode.com/GitHub_Trending/fa/fastapi FastAPI作为一款高性能、易…...

经典软件复活:DDrawCompat兼容性解决方案详解
经典软件复活:DDrawCompat兼容性解决方案详解 【免费下载链接】DDrawCompat DirectDraw and Direct3D 1-7 compatibility, performance and visual enhancements for Windows Vista, 7, 8, 10 and 11 项目地址: https://gitcode.com/gh_mirrors/dd/DDrawCompat …...

Filament Shield 高级技巧:如何为第三方插件生成权限和策略
Filament Shield 高级技巧:如何为第三方插件生成权限和策略 【免费下载链接】filament-shield The easiest and most intuitive way to add access management to your Filament Panel; Resources, Pages & Widgets through spatie/laravel-permission 项目地…...

5分钟掌握B站视频下载:免费获取4K大会员内容的完整指南
5分钟掌握B站视频下载:免费获取4K大会员内容的完整指南 【免费下载链接】bilibili-downloader B站视频下载,支持下载大会员清晰度4K,持续更新中 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-downloader 还在为B站视频无法…...

中小企业必看:低成本搭建ISO 9001质量管理体系的5个关键步骤
中小企业必看:低成本搭建ISO 9001质量管理体系的5个关键步骤 在资源有限的中小企业环境中,质量管理常常被视为"奢侈品"——直到一次客户投诉或监管审查让管理者意识到其必要性。ISO 9001标准作为国际通用的质量管理框架,其实不必意…...