用Skimage学习数字图像处理(021):图像特征提取之线检测(下)
本节是特征提取之线检测的下篇,讨论基于Hough变换的线检测方法。首先简要介绍Hough变换的基本原理,然后重点介绍Skimage中含有的基于Hough变换的直线和圆形检测到实现。
目录
10.4 Hough变换
10.4.1 原理
10.4.2 实现
10.4 Hough变换
Hough变换(霍夫变换)是一种在图像处理和计算机视觉中广泛使用的技术,是由Paul Hough在1962年提出。
Hough变换的一个主要优点是它对噪声和曲线间断的鲁棒性。它不仅限于检测直线,还可以用于检测圆、椭圆、三角形等多种形状。此外,Hough变换也广泛应用于计算机视觉的多个领域,如边缘检测、特征提取、模式识别等多个领域。
10.4.1 原理
Hough变换的基本原理是通过在参数空间中进行累加统计来检测图像中的基本形状,其核心思想是将图像空间中的曲线或直线变换到参数空间中,通过检测参数空间中的极值点来确定图像中曲线的描述参数,从而提取出规则的曲线。
有关原理的详细介绍,可参考相关的文献,再次不再赘述。我们重点介绍基于Skimage的Hough变换的实现。
10.4.2 实现
在Skimage中,提供了5个与Hough变换有关的函数,分别是:
- skimage.transform.hough_line:进行直线Hough变换.
- skimage.transform.hough_line_peaks:返回直线Hough变换的峰值.
- skimage.transform.hough_circle:进行圆Hough变换
- skimage.transform.hough_circle_peaks:返回圆形Hough变换的峰值.
- skimage.transform.hough_ellipse:进行椭圆Hough变换.
(1)直线检测
使用skimage.transform.hough_line()和skimage.transform.hough_line_peaks()实现直线检测:
skimage.transform.hough_line(image, theta).
skimage.transform.hough_line_peaks(hspace, angles, dists, min_distance, min_angle, threshold, num_peaks)
部分参数说明:
- image:输入图像。
- theta:Angles at which to compute the transform, in radians. Defaults to a vector of 180 angles evenly spaced in the range [-pi/2, pi/2).。
- hspace:Hough transform accumulator。Angles at which the transform is computed, in radians.
- angles:Angles at which the transform is computed, in radians。
- dists:输入图像。
- min_distance:输入图像。
- min_angle:输入图像。
- num_peaks:输入图像。
- hspace:输入图像。
返回值:
- hspace:ndarray of uint64, shape (P, Q),Hough transform accumulator.
- angles:Angles at which the transform is computed, in radians。
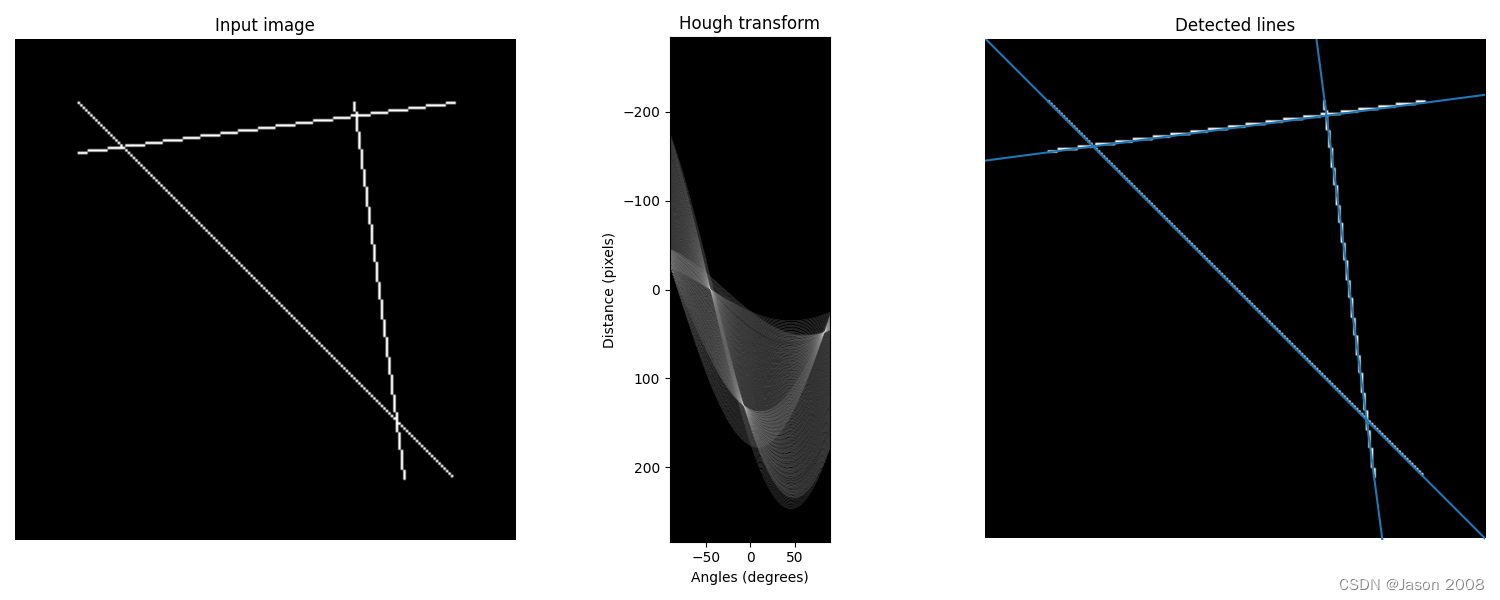
以下是官方提供的一个直线检测的实例:
import numpy as npfrom skimage.transform import hough_line, hough_line_peaks
from skimage.feature import canny
from skimage.draw import line as draw_line
from skimage import dataimport matplotlib.pyplot as plt
from matplotlib import cm# Constructing test image
image = np.zeros((200, 200))
idx = np.arange(25, 175)
image[idx, idx] = 255
image[draw_line(45, 25, 25, 175)] = 255
image[draw_line(25, 135, 175, 155)] = 255# Classic straight-line Hough transform
# Set a precision of 0.5 degree.
tested_angles = np.linspace(-np.pi / 2, np.pi / 2, 360, endpoint=False)
h, theta, d = hough_line(image, theta=tested_angles)# Generating figure 1
fig, axes = plt.subplots(1, 3, figsize=(15, 6))
ax = axes.ravel()ax[0].imshow(image, cmap=cm.gray)
ax[0].set_title('Input image')
ax[0].set_axis_off()angle_step = 0.5 * np.diff(theta).mean()
d_step = 0.5 * np.diff(d).mean()
bounds = [np.rad2deg(theta[0] - angle_step),np.rad2deg(theta[-1] + angle_step),d[-1] + d_step,d[0] - d_step,
]
ax[1].imshow(np.log(1 + h), extent=bounds, cmap=cm.gray, aspect=1 / 1.5)
ax[1].set_title('Hough transform')
ax[1].set_xlabel('Angles (degrees)')
ax[1].set_ylabel('Distance (pixels)')
ax[1].axis('image')ax[2].imshow(image, cmap=cm.gray)
ax[2].set_ylim((image.shape[0], 0))
ax[2].set_axis_off()
ax[2].set_title('Detected lines')for _, angle, dist in zip(*hough_line_peaks(h, theta, d)):(x0, y0) = dist * np.array([np.cos(angle), np.sin(angle)])ax[2].axline((x0, y0), slope=np.tan(angle + np.pi / 2))plt.tight_layout()
plt.show()以下是处理结果示例:
(2)圆形检测
使用skimage.transform.hough_circle()和skimage.transform.hough_circle_peaks()检测圆形:
skimage.transform.hough_circle(image, radius, normalize, full_output)
skimage.transform.hough_circle_peaks(hspaces, radii, min_xdistance, min_ydistance, threshold, num_peaks, total_num_peaks, normalize)
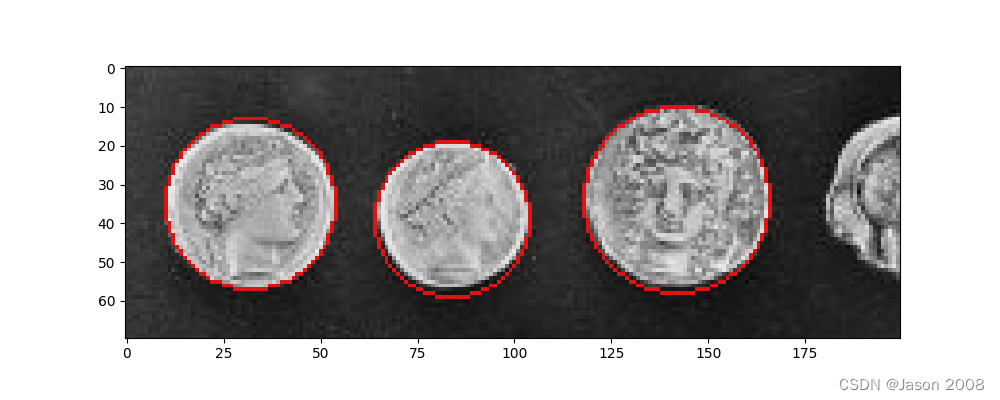
以下是官方提供的一个圆形检测的实例:
import numpy as np
import matplotlib.pyplot as pltfrom skimage import data, color
from skimage.transform import hough_circle, hough_circle_peaks
from skimage.feature import canny
from skimage.draw import circle_perimeter
from skimage.util import img_as_ubyte# Load picture and detect edges
image = img_as_ubyte(data.coins()[160:230, 70:270])
edges = canny(image, sigma=3, low_threshold=10, high_threshold=50)# Detect two radii
hough_radii = np.arange(20, 35, 2)
hough_res = hough_circle(edges, hough_radii)# Select the most prominent 3 circles
accums, cx, cy, radii = hough_circle_peaks(hough_res, hough_radii, total_num_peaks=3)# Draw them
fig, ax = plt.subplots(ncols=1, nrows=1, figsize=(10, 4))
image = color.gray2rgb(image)
for center_y, center_x, radius in zip(cy, cx, radii):circy, circx = circle_perimeter(center_y, center_x, radius, shape=image.shape)image[circy, circx] = (220, 20, 20)ax.imshow(image, cmap=plt.cm.gray)
plt.show()以下是处理结果示例:
(3)椭圆检测
使用skimage.transform.hough_ellipse()检测椭圆形:
skimage.transform.hough_ellipse(image, threshold, accuracy, min_size, max_size)
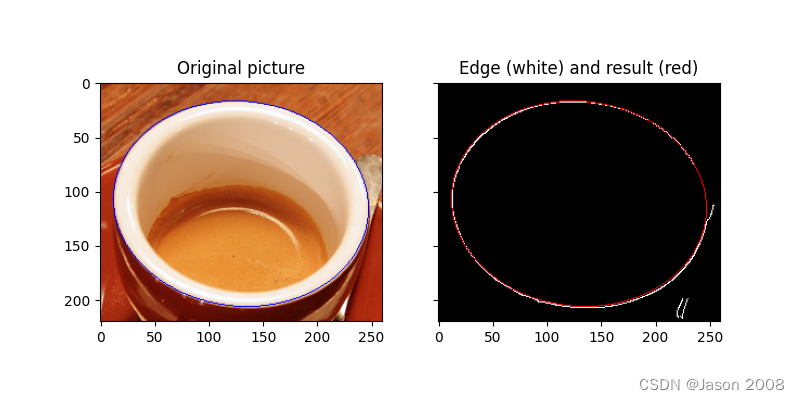
以下是官方提供的一个椭圆检测的实例:
import matplotlib.pyplot as pltfrom skimage import data, color, img_as_ubyte
from skimage.feature import canny
from skimage.transform import hough_ellipse
from skimage.draw import ellipse_perimeter# Load picture, convert to grayscale and detect edges
image_rgb = data.coffee()[0:220, 160:420]
image_gray = color.rgb2gray(image_rgb)
edges = canny(image_gray, sigma=2.0, low_threshold=0.55, high_threshold=0.8)# Perform a Hough Transform
result = hough_ellipse(edges, accuracy=20, threshold=250, min_size=100, max_size=120)
result.sort(order='accumulator')# Estimated parameters for the ellipse
best = list(result[-1])
yc, xc, a, b = (int(round(x)) for x in best[1:5])
orientation = best[5]# Draw the ellipse on the original image
cy, cx = ellipse_perimeter(yc, xc, a, b, orientation)
image_rgb[cy, cx] = (0, 0, 255)
# Draw the edge (white) and the resulting ellipse (red)
edges = color.gray2rgb(img_as_ubyte(edges))
edges[cy, cx] = (250, 0, 0)fig2, (ax1, ax2) = plt.subplots(ncols=2, nrows=1, figsize=(8, 4), sharex=True, sharey=True
)ax1.set_title('Original picture')
ax1.imshow(image_rgb)ax2.set_title('Edge (white) and result (red)')
ax2.imshow(edges)plt.show()以下是处理结果示例:
参考文献:
- Duda, R. O. and P. E. Hart, “Use of the Hough Transformation to Detect Lines and Curves in Pictures,” Comm. ACM, Vol. 15, pp. 11-15 (January, 1972)
- C. Galamhos, J. Matas and J. Kittler,”Progressive probabilistic Hough transform for line detection”, in IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 1999.
(未完待续)
相关文章:
用Skimage学习数字图像处理(021):图像特征提取之线检测(下)
本节是特征提取之线检测的下篇,讨论基于Hough变换的线检测方法。首先简要介绍Hough变换的基本原理,然后重点介绍Skimage中含有的基于Hough变换的直线和圆形检测到实现。 目录 10.4 Hough变换 10.4.1 原理 10.4.2 实现 10.4 Hough变换 Hough变换&…...

ArduPilot飞控之Gazebo + SITL + MP的Jetson Orin环境搭建
ArduPilot飞控之Gazebo SITL MP的Jetson Orin环境搭建 1. 源由2. Linux环境整理3. 安装Gazebo环境3.1 安装Gazebo3.2 安装插件3.3 配置插件3.4 测试Gazebo 4. 安装Arudpilot-SITL环境4.1 克隆工程4.2 编译准备4.3 环境配置4.4 配置编译4.5 测试运行 5. 测试运行6. 参考资料 1…...

前端错误监控的方法有哪些
前端错误监控是指通过各种手段收集、分析和处理前端应用运行中发生的错误 常用的前端错误监控的方法有 使用 try catch 方法 捕获特定代码块中的错误多用于处理特定函数或代码段可能抛出的异常,尤其是异步代码网络请求错误监控 promise.catchtry catch全局错误处理…...
✌粤嵌—2024/3/11—跳跃游戏
代码实现: 方法一:递归记忆化 int path; int used[10000];bool dfs(int *nums, int numsSize) {if (path numsSize - 1) {return true;}for (int i 1; i < nums[path]; i) {if (used[path i]) {continue;}path i;used[path] 1;if (dfs(nums, num…...
Docker入门实战教程
文章目录 Docker引擎的安装Docker比vm虚拟机快 Docker常用命令帮助启动类命令镜像命令docker imagesdocker searchdocker pulldocker system dfdocker rmi 容器命令redis前台交互式启动redis后台守护式启动Nginx容器运行ubuntu交互式运行tomcat交互式运行对外暴露访问端口 Dock…...
数据结构初阶:二叉树(一)
树概念及结构 树的概念 树是一种 非线性 的数据结构,它是由 n ( n>0 )个有限结点组成一个具有层次关系的集合。 把它叫做树是因 为它看起来像一棵倒挂的树,也就是说它是根朝上,而叶朝下的 。 有一个特殊的结点&a…...
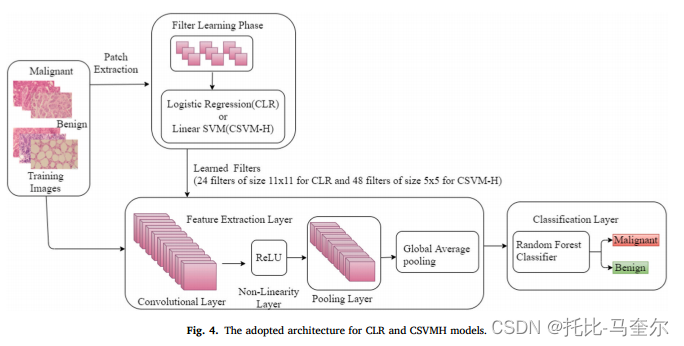
基于逻辑回归和支持向量机的前馈网络进行乳腺癌组织病理学图像分类
CNN(卷积神经网络)通过使用反向传播方法来学习特征,这种方法需要大量的训练数据,并且存在梯度消失问题,从而恶化了特征学习。 CNN卷积神经网络 CNN由一个多层神经网络组成,该网络从标记的训练数据集中学习…...

35-4 fastjson漏洞复现
环境准备:35-2 fastjson反序列化漏洞介绍 及漏洞环境搭建-CSDN博客 fastjson_tool.jar下载:fastjson_rce_tool: fastjson命令执行自动化利用工具, remote code execute,JNDI服务利用工具 RMI/LDAP (gitee.com) 一、攻击机kali开启nc监听6666端口(或其他端口也行,只要不…...

Qt-控件篇
QPushbutton 1、设置按钮文本 pushButton->setText("按钮"); 2、获取按钮文本 pushButton->text(); 3、设置按钮的大小为特定值(宽度和高度) pushButton->setFixedSize(width,height); 4、设置按钮悬停时的工具提示文本。 pushButto…...

实现 Table 的增加和删除,不依赖后端数据回显
需求 删除前 删除后 分析 首先写一个 Table <a-card style"width:100%"><template#extra><a-button type"text" click"addSelectItem" style"margin-right: 5px">添加</a-button><a-button type&quo…...
——三系统后端nodejs+express)
个人网站开发记录(七)——三系统后端nodejs+express
前言 这种已经完全工程化了的()后端其实已经没啥好说的了,因为就是单纯的写接口然后调用接口就完事了! 正文 唯一值得一提的大概是我在写这个系统的时候搞了https的链接,具体来说就是先申请一个ssl证书,…...

C#入门理解设计模式的6大原则
**设计模式的原则是指导设计模式创建和应用的基本原则,这些原则有助于创建灵活、可维护且可扩展的软件系统。**1. 单一职责原则(Single Responsibility Principle, SRP) 单一职责原则指出一个类应该只有一个引起它变化的原因。换句话说&…...

Linux如何切换root用户
Linux如何切换root用户 sudosudo -i想一直使用root权限,可以使用su命令 sudo 执行命令后,输入用户密码可以短暂的获取root权限 sudo -i 通过此命令直接输入当前管理员用户的密码就可以进入root用户了 想一直使用root权限,可以使用su命令 …...

uniapp小程序编译报错
说明 微信小程序编译每次都出现[ project.config.json 文件内容错误] project.config.json: libVersion 字段需为 string, 解决 找到manifest.json文件 添加:"libVersion": "latest",重新编译即可。...

van-uploader 在app内嵌的webview中的一些坑
问题: 部分版本在ios 中没有问题,但是安卓中不触发图片选择和拍照(之前是可以的,可能是没有锁定版本,重新发版导致的)。在ios中下拉文案是英文,html配置lang等于 zh 也没有用,ios里…...

使用Kotlin进行全栈开发 Ktor+Kotlin/JS
首发于Enaium的个人博客 前言 本文将介绍如何使用 Kotlin 全栈技术栈KtorKotlin/JS来构建一个简单的全栈应用。 准备工作 创建项目 首先我们需要创建一个Kotlin项目,之后继续在其中新建两个子项目,一个是Kotlin/JS项目,另一个是Ktor项目。…...

数据结构_带头双向循环链表
List.h 相较于之前的顺序表和单向链表,双向链表的逻辑结构稍微复杂一些,但是在实现各种接口的时候是很简单的。因为不用找尾,写起来会舒服一点。(也可能是因为最近一直在写这个的原因) #pragma once #include<std…...

常见的垃圾回收器(下)
文章目录 G1ShenandoahZGC 常见垃圾回收期(上) G1 参数1: -XX:UseG1GC 打开G1的开关,JDK9之后默认不需要打开 参数2:-XX:MaxGCPauseMillis毫秒值 最大暂停的时间 回收年代和算法 ● 年轻代老年代 ● 复制算法 优点…...

网桥的原理
网桥的原理 1.1 桥接的概念 简单来说,桥接就是把一台机器上的若干个网络接口“连接”起来,其结果是,其中一个网口收到的报文会被复制给其他网口并发送出去。以使得网口之间的报文能够互相转发。 交换机有若干个网口,并且这些…...

STM32 CAN过滤器细节
STM32 CAN过滤器细节 简介 每组筛选器包含2个32位的寄存器,分别为CAN_FxR1和CAN_FxR2,它们用来存储要筛选的ID或掩码 四种模式 模式说明32位掩码模式CAN_FxR1存储ID, CAN_FxR2存储哪个位必须要与CAN_FxR1中的ID一致 , 2个寄存器…...
【大模型RAG】拍照搜题技术架构速览:三层管道、两级检索、兜底大模型
摘要 拍照搜题系统采用“三层管道(多模态 OCR → 语义检索 → 答案渲染)、两级检索(倒排 BM25 向量 HNSW)并以大语言模型兜底”的整体框架: 多模态 OCR 层 将题目图片经过超分、去噪、倾斜校正后,分别用…...

Android Wi-Fi 连接失败日志分析
1. Android wifi 关键日志总结 (1) Wi-Fi 断开 (CTRL-EVENT-DISCONNECTED reason3) 日志相关部分: 06-05 10:48:40.987 943 943 I wpa_supplicant: wlan0: CTRL-EVENT-DISCONNECTED bssid44:9b:c1:57:a8:90 reason3 locally_generated1解析: CTR…...
从WWDC看苹果产品发展的规律
WWDC 是苹果公司一年一度面向全球开发者的盛会,其主题演讲展现了苹果在产品设计、技术路线、用户体验和生态系统构建上的核心理念与演进脉络。我们借助 ChatGPT Deep Research 工具,对过去十年 WWDC 主题演讲内容进行了系统化分析,形成了这份…...

1688商品列表API与其他数据源的对接思路
将1688商品列表API与其他数据源对接时,需结合业务场景设计数据流转链路,重点关注数据格式兼容性、接口调用频率控制及数据一致性维护。以下是具体对接思路及关键技术点: 一、核心对接场景与目标 商品数据同步 场景:将1688商品信息…...
【机器视觉】单目测距——运动结构恢复
ps:图是随便找的,为了凑个封面 前言 在前面对光流法进行进一步改进,希望将2D光流推广至3D场景流时,发现2D转3D过程中存在尺度歧义问题,需要补全摄像头拍摄图像中缺失的深度信息,否则解空间不收敛…...
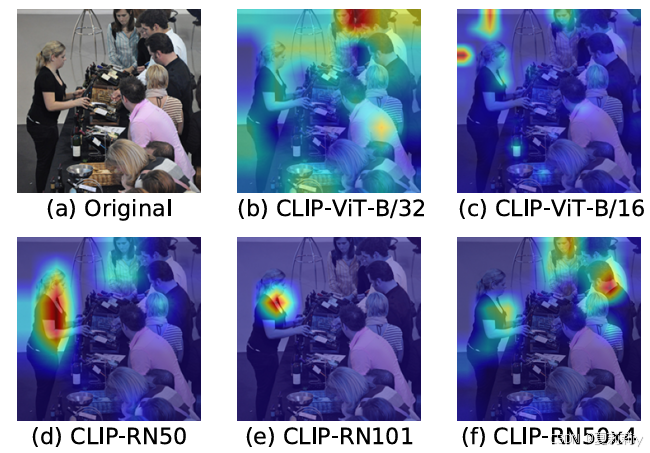
[ICLR 2022]How Much Can CLIP Benefit Vision-and-Language Tasks?
论文网址:pdf 英文是纯手打的!论文原文的summarizing and paraphrasing。可能会出现难以避免的拼写错误和语法错误,若有发现欢迎评论指正!文章偏向于笔记,谨慎食用 目录 1. 心得 2. 论文逐段精读 2.1. Abstract 2…...

安宝特方案丨船舶智造的“AR+AI+作业标准化管理解决方案”(装配)
船舶制造装配管理现状:装配工作依赖人工经验,装配工人凭借长期实践积累的操作技巧完成零部件组装。企业通常制定了装配作业指导书,但在实际执行中,工人对指导书的理解和遵循程度参差不齐。 船舶装配过程中的挑战与需求 挑战 (1…...
【从零学习JVM|第三篇】类的生命周期(高频面试题)
前言: 在Java编程中,类的生命周期是指类从被加载到内存中开始,到被卸载出内存为止的整个过程。了解类的生命周期对于理解Java程序的运行机制以及性能优化非常重要。本文会深入探寻类的生命周期,让读者对此有深刻印象。 目录 …...

HubSpot推出与ChatGPT的深度集成引发兴奋与担忧
上周三,HubSpot宣布已构建与ChatGPT的深度集成,这一消息在HubSpot用户和营销技术观察者中引发了极大的兴奋,但同时也存在一些关于数据安全的担忧。 许多网络声音声称,这对SaaS应用程序和人工智能而言是一场范式转变。 但向任何技…...
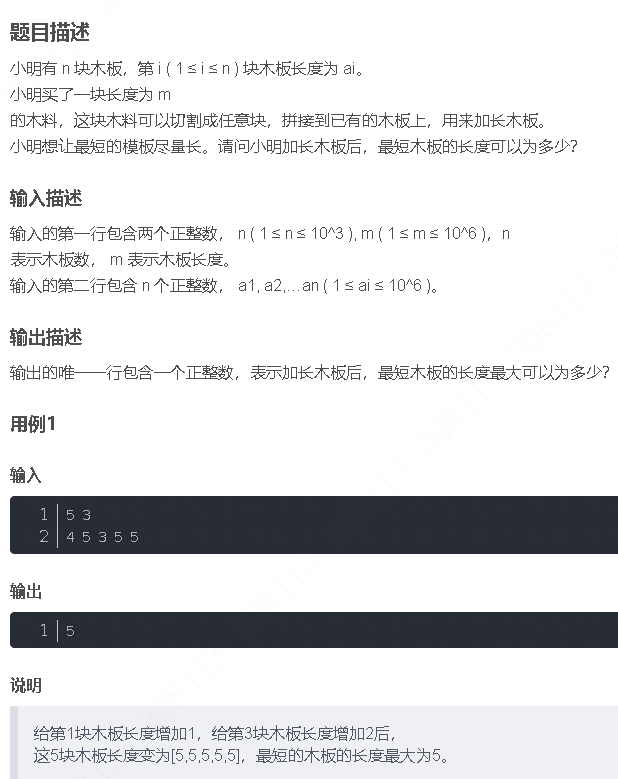
华为OD机试-最短木板长度-二分法(A卷,100分)
此题是一个最大化最小值的典型例题, 因为搜索范围是有界的,上界最大木板长度补充的全部木料长度,下界最小木板长度; 即left0,right10^6; 我们可以设置一个候选值x(mid),将木板的长度全部都补充到x,如果成功…...