平面分割--------PCL
平面分割
bool PclTool::planeSegmentation(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, pcl::ModelCoefficients::Ptr coefficients, pcl::PointIndices::Ptr inliers)
{std::cout << "Point cloud data: " << cloud->points.size() << " points" << std::endl;// 创建分割时所需要的模型系数对象,coefficients及存储内点的点索引集合对象inliers// pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);// pcl::PointIndices::Ptr inliers(new pcl::PointIndices);// pcl::ModelCoefficients用于存储平面模型的系数(A、B、C和D)。// Model coefficients: 0 0 1 -1:平面模型的系数表示为[A, B, C, D],其中A、B、C表示平面的法向量,D表示平面到原点的距离。在这里,系数为[0, 0, 1, -1],表示平面的法向量在Z轴上,距离原点的距离为1,即平面方程为Z=1。// 而pcl::PointIndices用于存储内点的索引// 创建分割对象pcl::SACSegmentation<pcl::PointXYZ> seg;// 可选择配置,设置模型系数需要优化seg.setOptimizeCoefficients(true);// 必要的配置,设置分割的模型类型,所用的随机参数估计方法,距离阀值,输入点云seg.setModelType(pcl::SACMODEL_PLANE); // 设置模型类型seg.setMethodType(pcl::SAC_RANSAC); // 设置随机采样一致性方法类型seg.setDistanceThreshold(0.01); // 设定距离阀值,距离阀值决定了点被认为是局内点是必须满足的条件// 表示点到估计模型的距离最大值,seg.setInputCloud(cloud);// 引发分割实现,存储分割结果到点几何inliers及存储平面模型的系数coefficientsseg.segment(*inliers, *coefficients);if (inliers->indices.size() == 0){std::cout << "Could not estimate a planar model for the given dataset." << std::endl;return false;}return true;
}
测试代码
// 平面分割pcl::PointCloud<pcl::PointXYZ>::Ptr planeSeg_cloud(new pcl::PointCloud<pcl::PointXYZ>);// 填充点云planeSeg_cloud->width = 15;planeSeg_cloud->height = 1;planeSeg_cloud->points.resize(planeSeg_cloud->width * planeSeg_cloud->height);// 生成数据,采用随机数填充点云的x,y坐标,都处于z为1的平面上for (size_t i = 0; i < planeSeg_cloud->points.size(); ++i){planeSeg_cloud->points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);planeSeg_cloud->points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);planeSeg_cloud->points[i].z = 1.0;}// 设置几个局外点,即重新设置几个点的z值,使其偏离z为1的平面planeSeg_cloud->points[0].z = 2.0;planeSeg_cloud->points[3].z = -2.0;planeSeg_cloud->points[6].z = 4.0;pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);pcl::PointIndices::Ptr inliers(new pcl::PointIndices);PclTool::planeSegmentation(planeSeg_cloud, coefficients, inliers);if (inliers->indices.size() == 0){std::cout << "Could not estimate a planar model for the given dataset." << std::endl;}// 打印出平面模型std::cout << "Model coefficients: " << coefficients->values[0] << " " << coefficients->values[1] << " " << coefficients->values[2] << " " << coefficients->values[3] << std::endl;std::cout << "Model inliers: " << inliers->indices.size() << std::endl;for (size_t i = 0; i < inliers->indices.size(); ++i){std::cout << inliers->indices[i] << "\t" << planeSeg_cloud->points[inliers->indices[i]].x << " " << planeSeg_cloud->points[inliers->indices[i]].y << " " << planeSeg_cloud->points[inliers->indices[i]].z << std::endl;}return 0;
反馈结果

- Model coefficients: 0 0 1 -1:平面模型的系数表示为[A, B, C, D],其中A、B、C表示平面的法向量,D表示平面到原点的距离。在这里,系数为[0, 0, 1, -1],表示平面的法向量在Z轴上,距离原点的距离为1,即平面方程为Z=1。
- pcl::PointIndices用于存储内点的索引
相关文章:
平面分割--------PCL
平面分割 bool PclTool::planeSegmentation(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, pcl::ModelCoefficients::Ptr coefficients, pcl::PointIndices::Ptr inliers) {std::cout << "Point cloud data: " << cloud->points.size() <<…...
前端之深拷贝
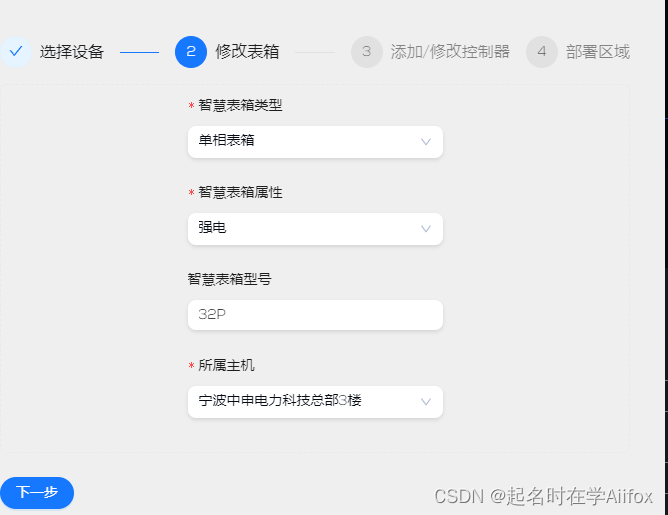
前提: 就是在实际开发中,我有一个编辑的弹窗,可以查看和编辑,因为弹窗里面是一个步骤条,点击下一步就要向对应的接口发送请求,考虑到就比如我点击下一步,此次表箱信息其实不需要修改࿰…...

2024年 Java 面试八股文——SpringCloud篇
目录 1.Spring Cloud Alibaba 中的 Nacos 是如何进行服务注册和发现的? 2.Spring Cloud Alibaba Sentinel 的流量控制规则有哪些? 3.Spring Cloud Alibaba 中如何实现分布式配置管理? 4.Spring Cloud Alibaba RocketMQ 的主要特点有哪些&…...

linux C语言Makefile
ChatGPT 在Linux中使用Makefile来自动化C语言项目的构建过程是很普遍的实践。Makefile是一个包含了一系列构建目标及如何构建这些目标的依赖和规则的文本文件。 一个基本的Makefile例子可能会像这样: # 定义编译器 CCgcc# 定义编译选项 CFLAGS-I.# 定义可执行文件…...
pgvector扩展在IvorySQL Oracle兼容模式下的应用实践
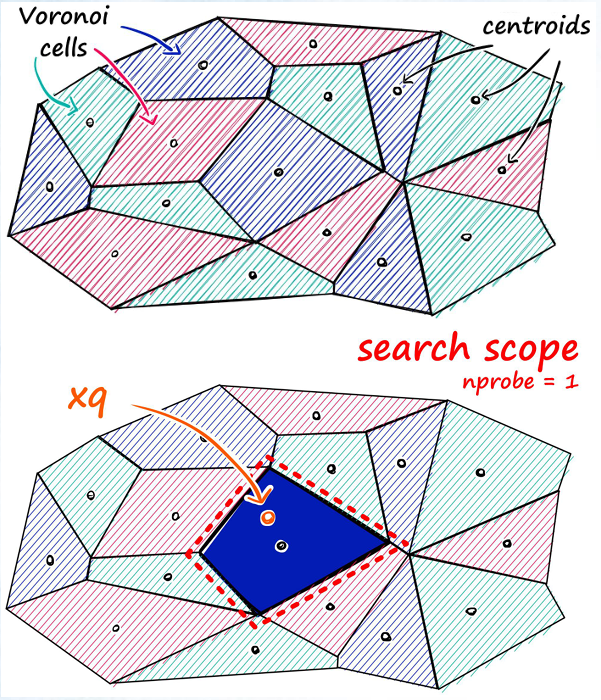
向量数据库是生成式人工智能(GenAI)的关键组成部分。作为PostgreSQL的重要扩展,pgvector支持高达16000维的向量计算能力,使得PostgreSQL能够直接转化为高效的向量数据库。 IvorySQL基于PostgreSQL开发,因此它同样支持添加pgvector扩展。在Ora…...

c++ 线程概述
C中的线程是并发编程的重要组成部分,它允许程序同时执行多个任务。以下是对C线程的概述: 基本概念: 并发:意味着两个或多个任务同时执行。在单核CPU上,由于只有一个CPU,某一时刻只能执行一个任务࿰…...

纯血鸿蒙APP实战开发——短视频切换实现案例
短视频切换实现案例 介绍 短视频切换在应用开发中是一种常见场景,上下滑动可以切换视频,十分方便。本模块基于Swiper组件和Video组件实现短视频切换功能。 效果图预览 使用说明 上下滑动可以切换视频。点击屏幕暂停视频,再次点击继续播放…...
36.Docker-Dockerfile自定义镜像
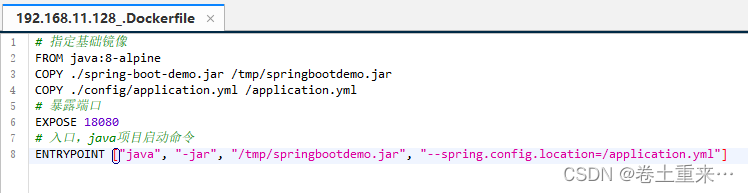
镜像结构 镜像是将应用程序及其需要的系统函数库、环境、配置、依赖打包而成。 镜像是分层机构,每一层都是一个layer BaseImage层:包含基本的系统函数库、环境变量、文件系统 EntryPoint:入口,是镜像中应用启动的命令 其他:在…...

【webrtc】MessageHandler 4: 基于线程的消息处理:以Fake 收发包模拟为例
G:\CDN\rtcCli\m98\src\media\base\fake_network_interface.h// Fake NetworkInterface that sends/receives RTP/RTCP packets.虚假的网络接口,用于模拟发送包、接收包单纯仅是处理一个ST_RTP包 消息的id就是ST_RTP 类型,– 然后给到目的地:mediachannel处理: 最后消息消…...

C#运算符“/”使用方法
C#中,当需要对两个整数进行除法运算时,结果会被截断为整数部分,即使结果本应是一个小数。这是因为整数除法会丢弃小数部分,只保留整数部分。 要想保留小数部分,需要将至少其中一个操作数转换为float、double或者 deci…...
虚拟机网络桥接模式无法通信,获取到的ip为169.254.X.X
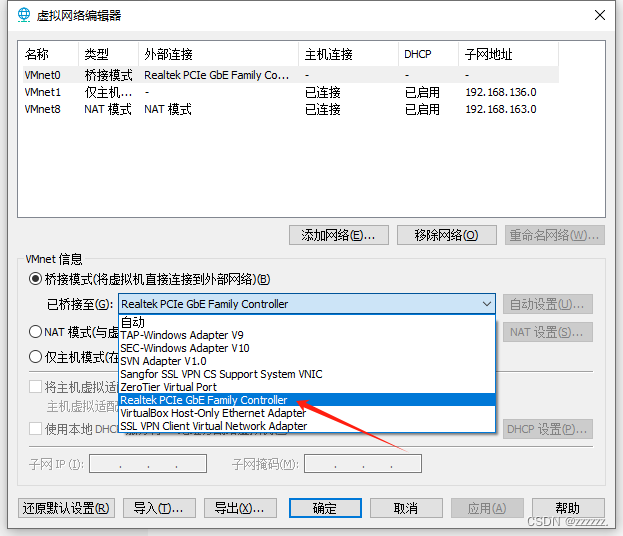
原因:VMware自动选择的网卡可能不对 解决:编辑-虚拟网络编辑器-更改桥接模式-选择宿主机物理网卡,断开虚拟机网络连接后重新连接即可...
【数据结构】初识数据结构
引入: 哈喽大家好,我是野生的编程萌新,首先感谢大家的观看。数据结构的学习者大多有这样的想法:数据结构很重要,一定要学好,但数据结构比较抽象,有些算法理解起来很困难,学的很累。我…...
相机知识的补充
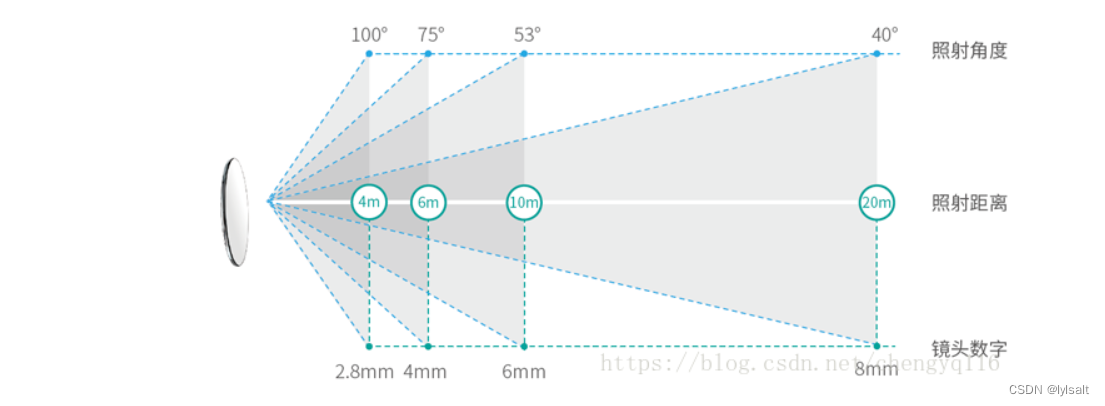
一:镜头 1.1MP的概念 相机中MP的意思是指百万像素。MP是mega pixel的缩写。mega意为一百万,mega pixel 指意为100万像素。“像素”是相机感光器件上的感光最小单位。就像是光学相机的感光胶片的银粒一样,记忆在数码相机的“胶片”ÿ…...

在Linux操作系统中实现磁盘开机自动挂载
当一个分区创建好,然后文件系统创建完毕之后, 需要使用mount命令将分区挂载到空目录上,这个挂载关系是临时的,也就是说当重启机器的时候,硬盘分区于空目录之间的挂载关系就会解除。 磁盘于目录之间的挂载关系断开意味…...

单片机编程实例400例大全(100-200)
今天继续分享单片机编程实例第100-200例。 今天的实例会比前面100复杂一些,我大概看了下,很多都具备实际产品的参考价值。 今天继续分享单片机编程实例第100-200例。 今天的实例会比前面100复杂一些,我大概看了下,很多都具备实际…...

新兴游戏引擎Godot vs. 主流游戏引擎Unity和虚幻引擎,以及版本控制工具Perforce Helix Core如何与其高效集成
游戏行业出现一个新生事物——Godot,一个免费且开源的2D和3D游戏引擎。曾经由Unity和虚幻引擎(Unreal Engine)等巨头主导的领域如今迎来了竞争对手。随着最近“独特”定价模式的变化,越来越多的独立开发者和小型开发团队倾向于选择…...

Leetcode—1652. 拆炸弹【简单】
2024每日刷题(127) Leetcode—1652. 拆炸弹 实现代码 class Solution { public:vector<int> decrypt(vector<int>& code, int k) {int codeSize code.size();vector<int> ans(codeSize, 0);if(k 0) {return ans;}if(k > 0)…...

JAVASE---抽象类相关
instanceof 和类型转换 System.out.println(X instanceof Y );主要看X与Y之间是否存在父子(继承)关系,如果存在则编译可完成,否则无法 进行编译。 1.父类引用指向子类的对象 2.把子类转换为父类,向上转型; 3.把父类转…...

深入理解C++中的inline函数
在C编程中,我们经常会遇到inline关键字,它用于修饰函数,以建议编译器将该函数的调用替换为函数体的直接拷贝。这就是inline函数的基本概念。然而,inline函数并非真正意义上的函数,而只是一种"在调用点插入函数体&…...

Rust 动态数组Vector
导航 一、动态数组是什么,怎么用1、动态数组Vector是什么2、动态数组怎么用(1)创建动态数组(2)尾部追加元素(3)尾部删除元素(4)删除指定位置元素(5࿰…...

(LeetCode 每日一题) 3442. 奇偶频次间的最大差值 I (哈希、字符串)
题目:3442. 奇偶频次间的最大差值 I 思路 :哈希,时间复杂度0(n)。 用哈希表来记录每个字符串中字符的分布情况,哈希表这里用数组即可实现。 C版本: class Solution { public:int maxDifference(string s) {int a[26]…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...
: K8s 核心概念白话解读(上):Pod 和 Deployment 究竟是什么?)
云原生核心技术 (7/12): K8s 核心概念白话解读(上):Pod 和 Deployment 究竟是什么?
大家好,欢迎来到《云原生核心技术》系列的第七篇! 在上一篇,我们成功地使用 Minikube 或 kind 在自己的电脑上搭建起了一个迷你但功能完备的 Kubernetes 集群。现在,我们就像一个拥有了一块崭新数字土地的农场主,是时…...

【杂谈】-递归进化:人工智能的自我改进与监管挑战
递归进化:人工智能的自我改进与监管挑战 文章目录 递归进化:人工智能的自我改进与监管挑战1、自我改进型人工智能的崛起2、人工智能如何挑战人类监管?3、确保人工智能受控的策略4、人类在人工智能发展中的角色5、平衡自主性与控制力6、总结与…...
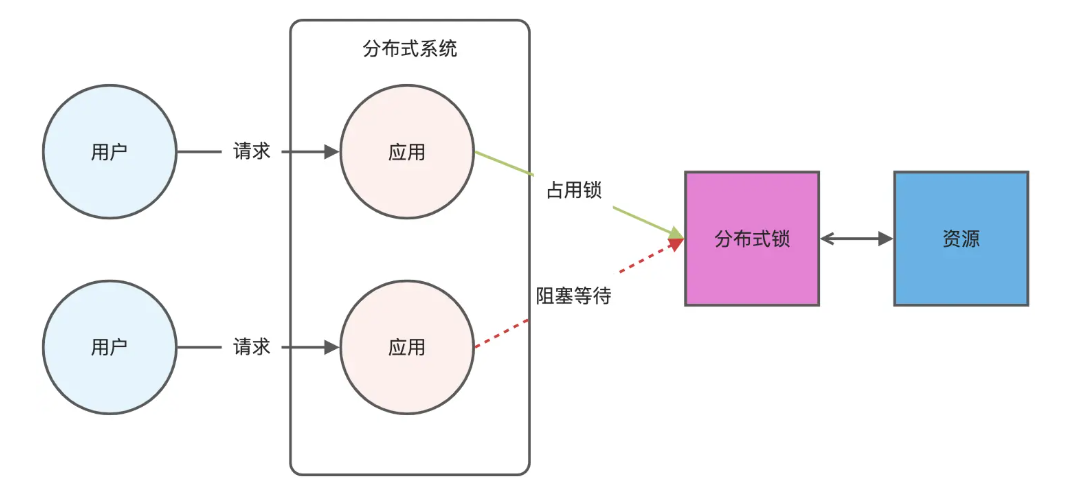
Redis相关知识总结(缓存雪崩,缓存穿透,缓存击穿,Redis实现分布式锁,如何保持数据库和缓存一致)
文章目录 1.什么是Redis?2.为什么要使用redis作为mysql的缓存?3.什么是缓存雪崩、缓存穿透、缓存击穿?3.1缓存雪崩3.1.1 大量缓存同时过期3.1.2 Redis宕机 3.2 缓存击穿3.3 缓存穿透3.4 总结 4. 数据库和缓存如何保持一致性5. Redis实现分布式…...

什么是EULA和DPA
文章目录 EULA(End User License Agreement)DPA(Data Protection Agreement)一、定义与背景二、核心内容三、法律效力与责任四、实际应用与意义 EULA(End User License Agreement) 定义: EULA即…...
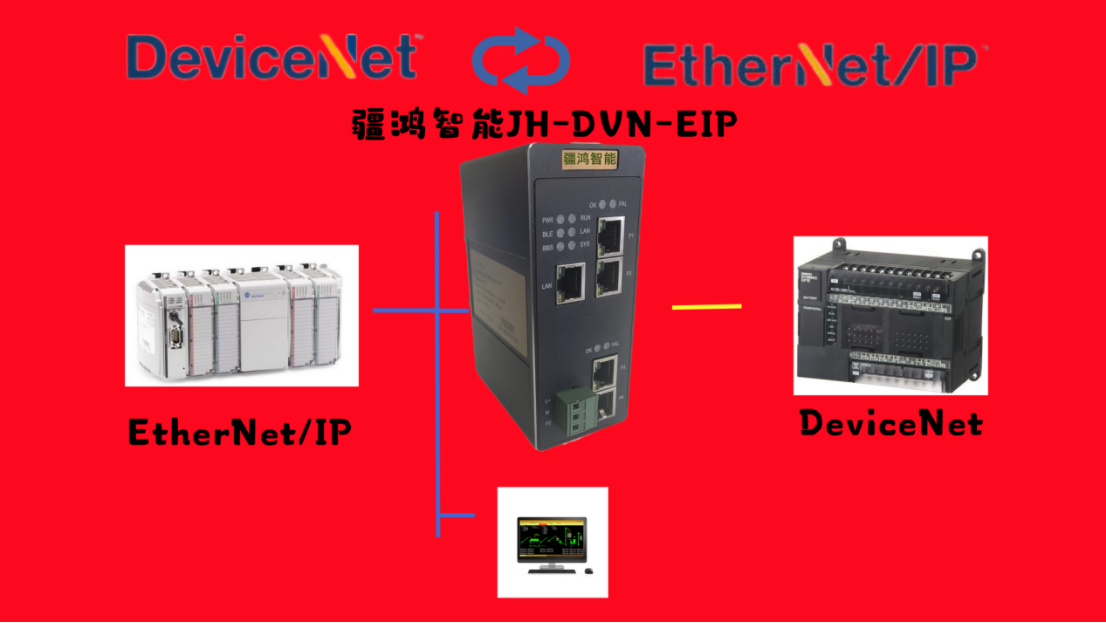
EtherNet/IP转DeviceNet协议网关详解
一,设备主要功能 疆鸿智能JH-DVN-EIP本产品是自主研发的一款EtherNet/IP从站功能的通讯网关。该产品主要功能是连接DeviceNet总线和EtherNet/IP网络,本网关连接到EtherNet/IP总线中做为从站使用,连接到DeviceNet总线中做为从站使用。 在自动…...

JDK 17 新特性
#JDK 17 新特性 /**************** 文本块 *****************/ python/scala中早就支持,不稀奇 String json “”" { “name”: “Java”, “version”: 17 } “”"; /**************** Switch 语句 -> 表达式 *****************/ 挺好的ÿ…...

虚拟电厂发展三大趋势:市场化、技术主导、车网互联
市场化:从政策驱动到多元盈利 政策全面赋能 2025年4月,国家发改委、能源局发布《关于加快推进虚拟电厂发展的指导意见》,首次明确虚拟电厂为“独立市场主体”,提出硬性目标:2027年全国调节能力≥2000万千瓦࿰…...
宇树科技,改名了!
提到国内具身智能和机器人领域的代表企业,那宇树科技(Unitree)必须名列其榜。 最近,宇树科技的一项新变动消息在业界引发了不少关注和讨论,即: 宇树向其合作伙伴发布了一封公司名称变更函称,因…...