模糊C均值(FCM)算法更新公式推导
模糊C均值(FCM)算法更新公式推导
目标函数
FCM的目标函数为:
J m = ∑ i = 1 n ∑ j = 1 k u i j m ∥ x i − c j ∥ 2 J_m = \sum_{i=1}^n \sum_{j=1}^k u_{ij}^m \|x_i - c_j\|^2 Jm=i=1∑nj=1∑kuijm∥xi−cj∥2
其中:
- x i x_i xi 是数据点, i = 1 , 2 , … , n i = 1, 2, \ldots, n i=1,2,…,n。
- c j c_j cj 是第 j j j 个簇的中心, j = 1 , 2 , … , k j = 1, 2, \ldots, k j=1,2,…,k。
- u i j u_{ij} uij 是数据点 x i x_i xi 属于第 j j j 个簇的隶属度。
- m m m 是模糊度参数,通常 m > 1 m > 1 m>1。
更新公式推导过程
1. 定义目标函数
J m = ∑ i = 1 n ∑ j = 1 k u i j m ∥ x i − c j ∥ 2 J_m = \sum_{i=1}^n \sum_{j=1}^k u_{ij}^m \|x_i - c_j\|^2 Jm=i=1∑nj=1∑kuijm∥xi−cj∥2
2. 引入约束条件
∑ j = 1 k u i j = 1 ∀ i \sum_{j=1}^k u_{ij} = 1 \quad \forall i j=1∑kuij=1∀i
使用拉格朗日乘数法,引入拉格朗日乘子 λ i \lambda_i λi,构造拉格朗日函数:
L = ∑ i = 1 n ∑ j = 1 k u i j m ∥ x i − c j ∥ 2 + ∑ i = 1 n λ i ( ∑ j = 1 k u i j − 1 ) \mathcal{L} = \sum_{i=1}^n \sum_{j=1}^k u_{ij}^m \|x_i - c_j\|^2 + \sum_{i=1}^n \lambda_i \left( \sum_{j=1}^k u_{ij} - 1 \right) L=i=1∑nj=1∑kuijm∥xi−cj∥2+i=1∑nλi(j=1∑kuij−1)
3. 对 u i j u_{ij} uij 求偏导数并设为零
对拉格朗日函数 L \mathcal{L} L 求 u i j u_{ij} uij 的偏导数并设为零:
∂ L ∂ u i j = m u i j m − 1 ∥ x i − c j ∥ 2 + λ i = 0 \frac{\partial \mathcal{L}}{\partial u_{ij}} = m u_{ij}^{m-1} \|x_i - c_j\|^2 + \lambda_i = 0 ∂uij∂L=muijm−1∥xi−cj∥2+λi=0
解这个方程得到:
u i j m − 1 = − λ i m ∥ x i − c j ∥ 2 u_{ij}^{m-1} = -\frac{\lambda_i}{m \|x_i - c_j\|^2} uijm−1=−m∥xi−cj∥2λi
为了保证 (u_{ij}) 非负,设 λ i = − m ζ \lambda_i = -m\zeta λi=−mζ,则:
u i j m − 1 = ζ ∥ x i − c j ∥ 2 u_{ij}^{m-1} = \frac{\zeta}{\|x_i - c_j\|^2} uijm−1=∥xi−cj∥2ζ
即:
u i j = ( ζ ∥ x i − c j ∥ 2 ) 1 m − 1 u_{ij} = \left( \frac{\zeta}{\|x_i - c_j\|^2} \right)^{\frac{1}{m-1}} uij=(∥xi−cj∥2ζ)m−11
4. 求解拉格朗日乘子 ζ \zeta ζ
利用约束条件 ∑ j = 1 k u i j = 1 \sum_{j=1}^k u_{ij} = 1 ∑j=1kuij=1:
∑ j = 1 k ( ζ ∥ x i − c j ∥ 2 ) 1 m − 1 = 1 \sum_{j=1}^k \left( \frac{\zeta}{\|x_i - c_j\|^2} \right)^{\frac{1}{m-1}} = 1 j=1∑k(∥xi−cj∥2ζ)m−11=1
解这个方程得到:
ζ = ( ∑ j = 1 k ( 1 ∥ x i − c j ∥ 2 ) 1 m − 1 ) 1 − m \zeta = \left( \sum_{j=1}^k \left( \frac{1}{\|x_i - c_j\|^2} \right)^{\frac{1}{m-1}} \right)^{1-m} ζ=(j=1∑k(∥xi−cj∥21)m−11)1−m
代入 u i j u_{ij} uij 的表达式,得到隶属度更新公式:
u i j = 1 ∑ l = 1 k ( ∥ x i − c j ∥ ∥ x i − c l ∥ ) 2 m − 1 u_{ij} = \frac{1}{\sum_{l=1}^k \left( \frac{\|x_i - c_j\|}{\|x_i - c_l\|} \right)^{\frac{2}{m-1}}} uij=∑l=1k(∥xi−cl∥∥xi−cj∥)m−121
5. 对簇中心 c j c_j cj 求偏导数并设为零
对目标函数 J m J_m Jm 对 c j c_j cj 求偏导数并设为零:
∂ J m ∂ c j = ∑ i = 1 n u i j m ( c j − x i ) = 0 \frac{\partial J_m}{\partial c_j} = \sum_{i=1}^n u_{ij}^m (c_j - x_i) = 0 ∂cj∂Jm=i=1∑nuijm(cj−xi)=0
解这个方程得到:
∑ i = 1 n u i j m c j = ∑ i = 1 n u i j m x i \sum_{i=1}^n u_{ij}^m c_j = \sum_{i=1}^n u_{ij}^m x_i i=1∑nuijmcj=i=1∑nuijmxi
c j = ∑ i = 1 n u i j m x i ∑ i = 1 n u i j m c_j = \frac{\sum_{i=1}^n u_{ij}^m x_i}{\sum_{i=1}^n u_{ij}^m} cj=∑i=1nuijm∑i=1nuijmxi
总结
通过上述推导过程,我们得到了FCM算法的更新公式:
- 隶属度更新公式:
u i j = 1 ∑ l = 1 k ( ∥ x i − c j ∥ ∥ x i − c l ∥ ) 2 m − 1 u_{ij} = \frac{1}{\sum_{l=1}^k \left(\frac{\|x_i - c_j\|}{\|x_i - c_l\|}\right)^{\frac{2}{m-1}}} uij=∑l=1k(∥xi−cl∥∥xi−cj∥)m−121
- 簇中心更新公式:
c j = ∑ i = 1 n u i j m x i ∑ i = 1 n u i j m c_j = \frac{\sum_{i=1}^n u_{ij}^m x_i}{\sum_{i=1}^n u_{ij}^m} cj=∑i=1nuijm∑i=1nuijmxi
这些公式在每次迭代中交替更新,直到目标函数收敛。
相关文章:
算法更新公式推导)
模糊C均值(FCM)算法更新公式推导
模糊C均值(FCM)算法更新公式推导 目标函数 FCM的目标函数为: J m ∑ i 1 n ∑ j 1 k u i j m ∥ x i − c j ∥ 2 J_m \sum_{i1}^n \sum_{j1}^k u_{ij}^m \|x_i - c_j\|^2 Jmi1∑nj1∑kuijm∥xi−cj∥2 其中: …...

金融创新浪潮下的拆分盘投资探索
随着数字化时代的步伐加速,金融领域正经历着前所未有的变革。在众多金融创新中,拆分盘作为一种新兴的投资模式,以其独特的增长机制,吸引了投资者的广泛关注。本文将对拆分盘的投资逻辑进行深入剖析,并结合具体案例&…...
一份不知道哪里来的第十五届国赛模拟题
这是一个不知道来源的模拟题目,没有完全完成,只作代码记录,不作分析和展示,极其冗长,但里面有长按短按双击的复合,可以看看。 目录 题目代码底层驱动主程序核心代码关键:双击单击长按复合代码 …...
机器人动力学模型与MATLAB仿真
机器人刚体动力学由以下方程控制!!! startup_rvc mdl_puma560 p560.dyn 提前计算出来这些“disturbance”,然后在控制环路中将它“抵消”(有时候也叫前馈控制) 求出所需要的力矩,其中M项代表克服…...
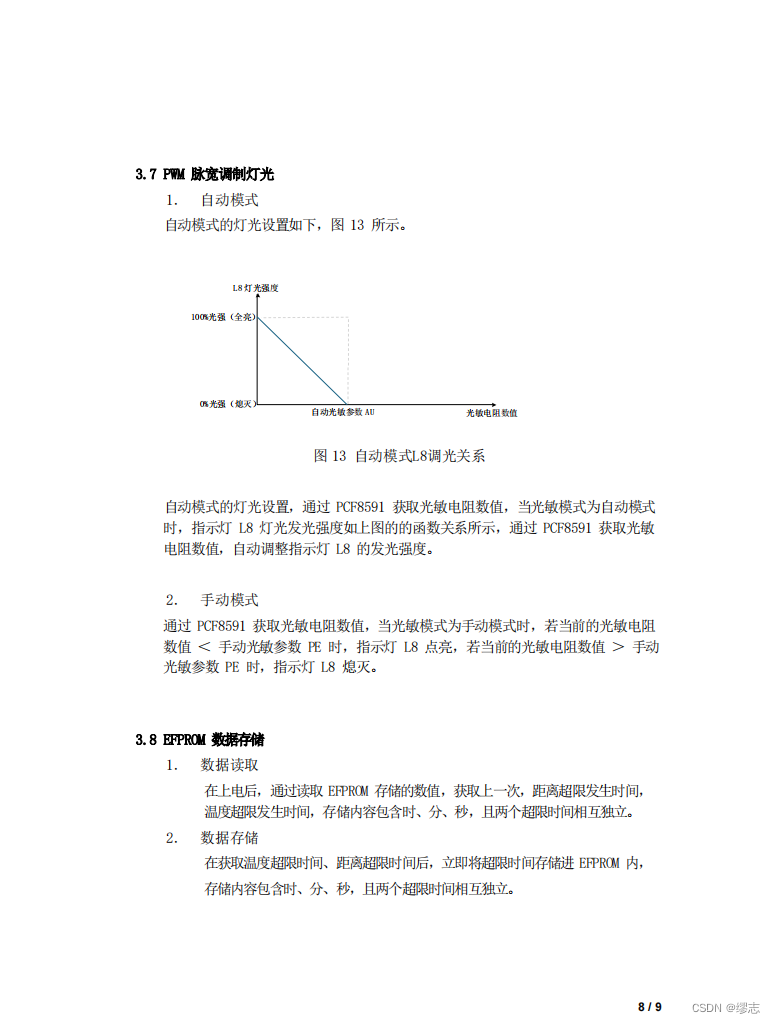
SAPUI5基础知识3 - 引导过程(Bootstrap)
1. 背景 在上一篇博客中,我们已经建立出了第一个SAPUI5项目,接下来,我们将为这个项目添加引导过程。 在动手练习之前,让我们先解释一下什么引导过程。 1.1 什么是引导过程? 在计算机科学中,引导过程也称…...
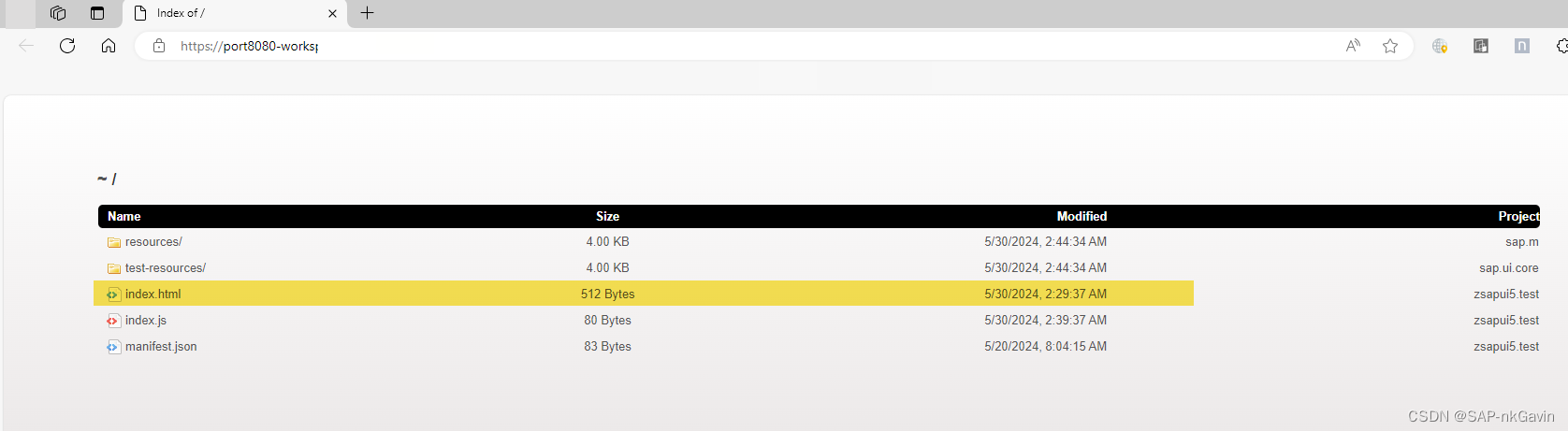
ABAP 借助公司封装的钉钉URL,封装的RFC给钉钉发送消息
FUNCTION ZRFC_BC_SMSSEND_DINGTALK. *"---------------------------------------------------------------------- *"*"本地接口: *" IMPORTING *" VALUE(DESTUSRID) TYPE CHAR255 *" VALUE(CONTENT) TYPE CHAR255 *&quo…...

登录校验及全局异常处理器
登录校验 会话技术 会话:用户打开浏览器,访问web服务器的资源,会话建立,直到有一方断开连接,会话结束.在一次会话中可以包含多次请求和响应会话跟踪:一种维护浏览器状态的方法,服务器需要识别多次请求是否来自于同一浏览器,以便在同一次会话请求间共享数据会话跟踪方案 客户端…...
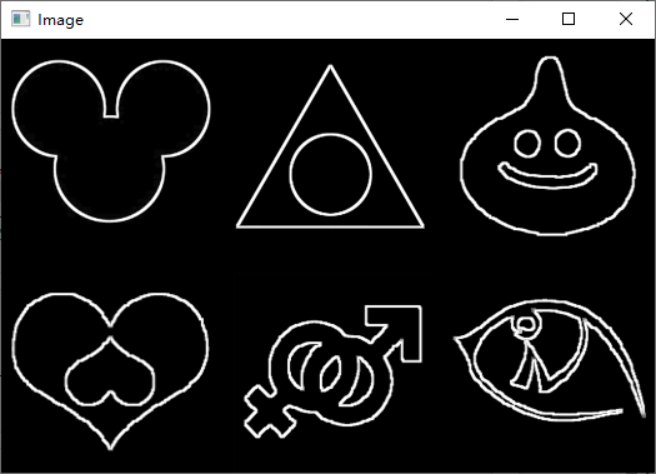
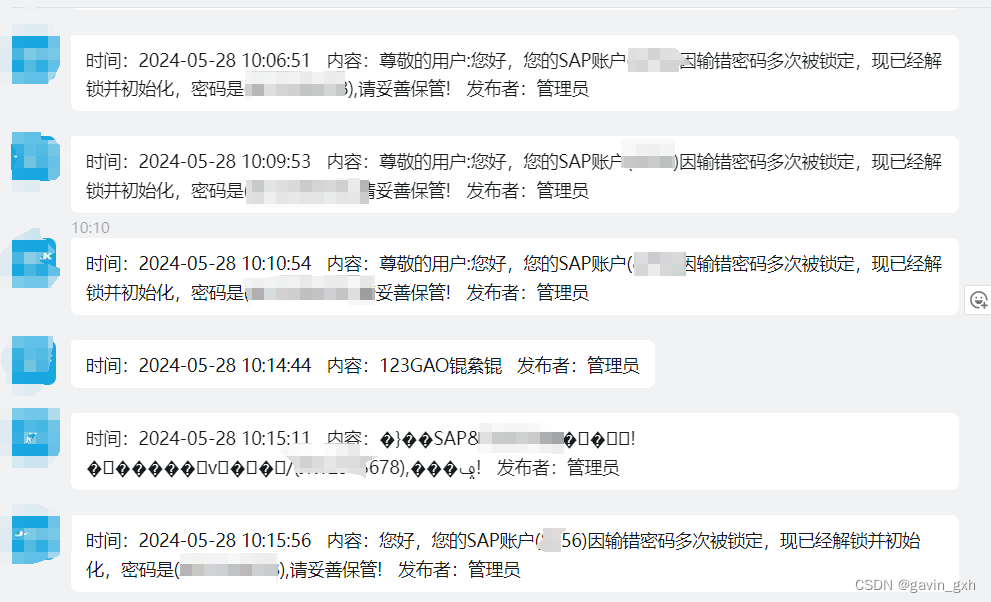
计算机视觉与模式识别实验1-2 图像的形态学操作
文章目录 🧡🧡实验流程🧡🧡1.图像膨胀2.图像腐蚀3.膨胀与腐蚀的综合使用4.对下面二值图像的目标提取骨架,并分析骨架结构。 🧡🧡全部代码🧡🧡 🧡🧡…...

【前端每日基础】day31——uni-app
uni-app 开发详细介绍 基本概念 uni-app:uni-app 是一个使用 Vue.js 开发多端应用的框架,可以编译到微信小程序、支付宝小程序、百度小程序、字节跳动小程序、H5、App等多个平台。 跨平台:一次开发,多端部署。通过条件编译实现多…...

云动态摘要 2024-05-31
给您带来云厂商的最新动态,最新产品资讯和最新优惠更新。 最新优惠与活动 [1.5折起]年中盛惠--AI分会场 腾讯云 2024-05-30 人脸核身、语音识别、文字识别、数智人、腾讯混元等热门AI产品特惠,1.5折起 云服务器ECS试用产品续用 阿里云 2024-04-14 云…...

Oracle数据块如何存储真实数据
上周休假了几天,颓废了,没有输出。今天写一点内容。 先抛出一个问题。表中的数据在Oracle数据块中是如何存储的呢?今天简单说一下这个问题。通常数据库中的表会存储字符,数字,日期 这3种常见的数据类型。下面的例子就用这3种数据类型作说明 首先,Oracle数据块底层存储这…...

【WEB前端2024】开源智体世界:乔布斯3D纪念馆-第30课-门的移动动画
【WEB前端2024】开源智体世界:乔布斯3D纪念馆-第30课-门的移动动画 使用dtns.network德塔世界(开源的智体世界引擎),策划和设计《乔布斯超大型的开源3D纪念馆》的系列教程。dtns.network是一款主要由JavaScript编写的智体世界引擎…...

智能化改造给企业带来的实际效果
1. 提高生产效率:通过自动化和智能化的生产线,减少人工操作,显著提升单位时间内的生产量。 2. 提升产品质量:智能化改造通过精确控制生产过程,减少人为错误,提高产品的一致性和可靠性。 3. 降低生产成本&am…...

深度学习-语言模型
深度学习-语言模型 统计语言模型神经网络语言模型语言模型的应用序列模型(Sequence Model)语言模型(Language Model)序列模型和语言模型的区别 语言模型(Language Model)是自然语言处理(NLP&…...

微型导轨在自动化制造中有哪些优势?
微型导轨在自动化制造中发挥重要作用,能够满足自动化设备制造中对精度要求较高的工艺环节。适用于自动装配线、自动检测设备和机器人操作等环节,推动了行业的进步与发展。那么,微型导轨在使用中有哪些优势呢? 1、精度高和稳定性强…...

探索气象数据的多维度三维可视化:PM2.5、风速与高度分析
探索气象数据的多维度可视化:PM2.5、风速与高度分析 摘要 在现代气象学中,数据可视化是理解复杂气象模式和趋势的关键工具。本文将介绍一种先进的数据可视化技术,它能够将PM2.5浓度、风速和高度等多维度数据以直观和动态的方式展现出来。 …...

【传知代码】双深度学习模型实现结直肠癌检测(论文复现)
前言:在医学领域,科技的进步一直是改变人类生活的关键驱动力之一。随着深度学习技术的不断发展,其在医学影像诊断领域的应用正日益受到关注。结直肠癌是一种常见但危害极大的恶性肿瘤,在早期发现和及时治疗方面具有重要意义。然而…...
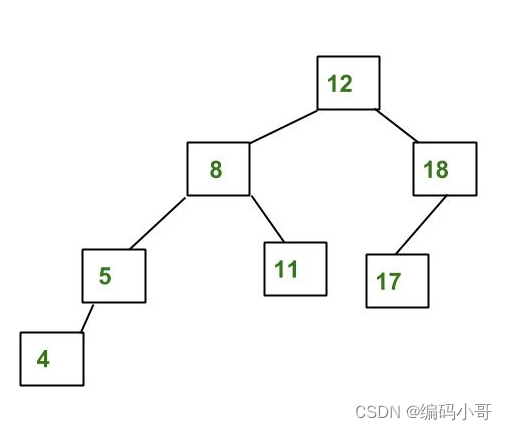
平衡二叉树的应用举例
AVL 是一种自平衡二叉搜索树,其中任何节点的左右子树的高度之差不能超过 1。 AVL树的特点: 1、它遵循二叉搜索树的一般属性。 2、树的每个子树都是平衡的,即左右子树的高度之差最多为1。 3、当插入新节点时,树会自我平衡。因此…...
一键安装 HaloDB 之 Ansible for Halo
↑ 关注“少安事务所”公众号,欢迎⭐收藏,不错过精彩内容~ 前倾回顾 前面介绍了“光环”数据库的基本情况和安装办法。 哈喽,国产数据库!Halo DB! 三步走,Halo DB 安装指引 以及 HaloDB 的 Oracle 和 MySQL 兼容模式: …...

el-table的上下筛选功能
el-table的sort-change事件可以监听到筛选的事件; 会返回prop属性和order排序的顺序; html: <el-table :data"tableData" border style"width: 100%" :cell-style"{ textAlign: center }"header-cell-c…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...
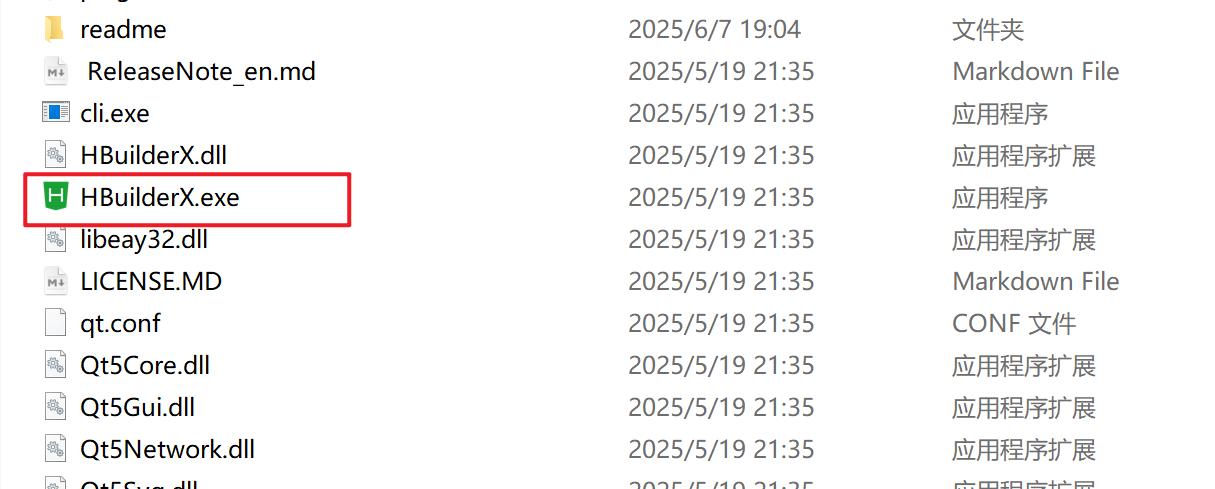
HBuilderX安装(uni-app和小程序开发)
下载HBuilderX 访问官方网站:https://www.dcloud.io/hbuilderx.html 根据您的操作系统选择合适版本: Windows版(推荐下载标准版) Windows系统安装步骤 运行安装程序: 双击下载的.exe安装文件 如果出现安全提示&…...

return this;返回的是谁
一个审批系统的示例来演示责任链模式的实现。假设公司需要处理不同金额的采购申请,不同级别的经理有不同的审批权限: // 抽象处理者:审批者 abstract class Approver {protected Approver successor; // 下一个处理者// 设置下一个处理者pub…...

招商蛇口 | 执笔CID,启幕低密生活新境
作为中国城市生长的力量,招商蛇口以“美好生活承载者”为使命,深耕全球111座城市,以央企担当匠造时代理想人居。从深圳湾的开拓基因到西安高新CID的战略落子,招商蛇口始终与城市发展同频共振,以建筑诠释对土地与生活的…...

苹果AI眼镜:从“工具”到“社交姿态”的范式革命——重新定义AI交互入口的未来机会
在2025年的AI硬件浪潮中,苹果AI眼镜(Apple Glasses)正在引发一场关于“人机交互形态”的深度思考。它并非简单地替代AirPods或Apple Watch,而是开辟了一个全新的、日常可接受的AI入口。其核心价值不在于功能的堆叠,而在于如何通过形态设计打破社交壁垒,成为用户“全天佩戴…...

从“安全密码”到测试体系:Gitee Test 赋能关键领域软件质量保障
关键领域软件测试的"安全密码":Gitee Test如何破解行业痛点 在数字化浪潮席卷全球的今天,软件系统已成为国家关键领域的"神经中枢"。从国防军工到能源电力,从金融交易到交通管控,这些关乎国计民生的关键领域…...

Ubuntu Cursor升级成v1.0
0. 当前版本低 使用当前 Cursor v0.50时 GitHub Copilot Chat 打不开,快捷键也不好用,当看到 Cursor 升级后,还是蛮高兴的 1. 下载 Cursor 下载地址:https://www.cursor.com/cn/downloads 点击下载 Linux (x64) ,…...

ubuntu系统文件误删(/lib/x86_64-linux-gnu/libc.so.6)修复方案 [成功解决]
报错信息:libc.so.6: cannot open shared object file: No such file or directory: #ls, ln, sudo...命令都不能用 error while loading shared libraries: libc.so.6: cannot open shared object file: No such file or directory重启后报错信息&…...
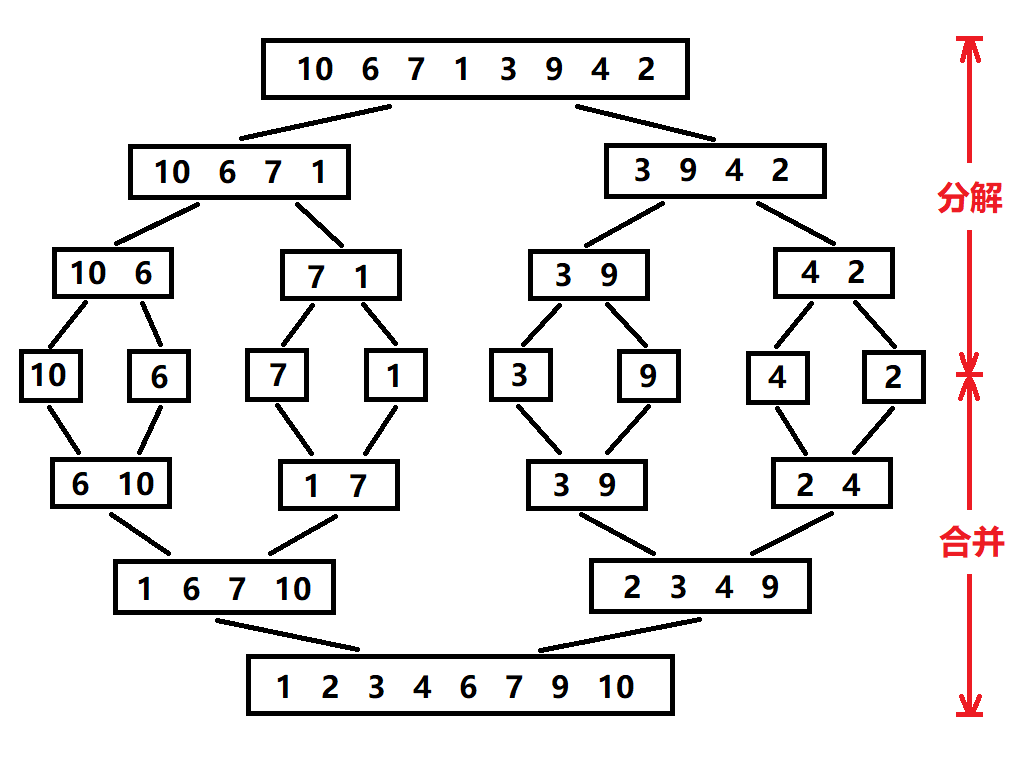
归并排序:分治思想的高效排序
目录 基本原理 流程图解 实现方法 递归实现 非递归实现 演示过程 时间复杂度 基本原理 归并排序(Merge Sort)是一种基于分治思想的排序算法,由约翰冯诺伊曼在1945年提出。其核心思想包括: 分割(Divide):将待排序数组递归地分成两个子…...
Canal环境搭建并实现和ES数据同步
作者:田超凡 日期:2025年6月7日 Canal安装,启动端口11111、8082: 安装canal-deployer服务端: https://github.com/alibaba/canal/releases/1.1.7/canal.deployer-1.1.7.tar.gz cd /opt/homebrew/etc mkdir canal…...