2013年 阿拉斯加巴罗活动层厚度和土壤含水量
Pre-ABoVE: Active Layer Thickness and Soil Water Content, Barrow, Alaska, 2013
ABoVE前:阿拉斯加巴罗活动层厚度和土壤含水量,2013年
简介
文件修订日期:2018-01-10
数据集版本:1
摘要
该数据集提供了 2013 年 8 月在阿拉斯加巴罗周围四个选定地点通过地面测量确定的有源层厚度 (ALT) 估计值,以及计算得出的土壤容积含水量 (VWC)。ALT 是通过地面穿透雷达 (GPR) 系统和传统机械探测确定的。其中还包括计算出的不确定性。GPR 测量沿长度不等(约 1 至 7 千米)的四个横断面进行。机械探测包括沿每个 GPR 断面进行若干次高密度勘测(100 米勘测线内每隔 1 米)。在每个站点的 3-8 个校准点计算活动层土壤的 VWC,在这些校准点,探头测量与 GPR 跟踪精确定位。
使用 500 MHz GPR 共进行了约 15 千米的 ALT 测量,并在四个地点获得了约 1.5 千米的探测数据。之所以选择这四个地点,是因为它们代表了巴罗地区常见的各种环境条件。数据在八月份收集,以接近一年中活动层厚度最大的时间。GPR 是以极高的空间密度长距离采集 ALT 的理想选择。
大约每隔一公里进行一次机械探测,以校准用于将双向传输时间转换为 ALT 的 GPR 波速。对于每个校准探头,都在 GPR 天线附近进行了三次探头测量的平均值。此外,还沿着 GPR 轨道铺设了一条 100 米长的测量线,并使用机械探头每隔一米进行一次 ALT 测量。高密度探头测量结果用于校准每个研究地点的平均波速和标准偏差。通过从传输时间计算 ALT,传播波速标准偏差,从而估算出土壤水分变化对 GPR ALT 造成的不确定性。
该数据集包含五个数据文件,其中三个为逗号分隔格式(.csv),两个为形状文件(.shp)。该数据集还包括一些辅助文件:以 .kmz 格式提供的形状文件,用于在 GoogleEarth 中查看,以及 GPR 仪器的原始读数。
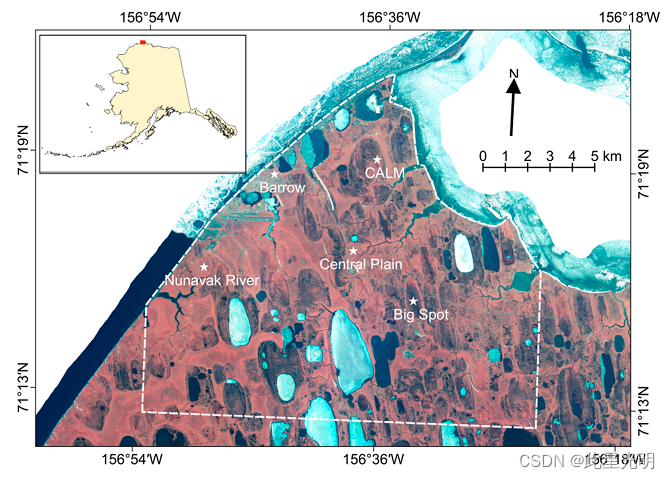
图 1.阿拉斯加巴罗周围四个地点的谷歌地球图像(摘自 Schaefer 等人,2015 年,图 1)。
永久冻土活动层厚度(ALT)是研究寒冷地区地表能量平衡、生态系统和水文过程的一个重要参数。2013 年 8 月,使用地面穿透雷达 (GPR) 系统和机械探测对阿拉斯加巴罗周围的四个地点的 ALT 进行了估算。GPR 测量沿四条长度不等(约 1 至 7 千米)的横断面进行。通过机械探测估算的传统 ALT 包括沿每个 GPR 断面进行的几次高密度勘测(100 米勘测线内每隔 1 米)。此外,还在每个站点的 3-8 个校准点计算了活动层土壤的 VWC,在这些校准点,探头测量与 GPR 跟踪精确定位。
使用 500 MHz GPR 共进行了约 15 千米的 ALT 测量,并在四个地点采集了约 1.5 千米的探测数据。数据是在八月份采集的,以接近一年中活动层厚度最大的时间。GPR 非常适合在长距离上以极高的空间密度获取 ALT。
大约每隔一公里进行一次机械探测,以校准用于将双向传输时间转换为 ALT 的 GPR 波速。对于每个校准探头,都在 GPR 天线附近进行了三次探头测量的平均值。此外,还沿着 GPR 轨道铺设了一条 100 米长的测量线,并使用机械探头每隔一米进行一次 ALT 测量。高密度探头测量结果用于校准每个研究地点的平均波速和标准偏差。通过从传输时间计算 ALT,传播波速标准偏差,从而估算出土壤水分变化对 GPR ALT 造成的不确定性。
项目名称北极-北方脆弱性实验 (ABoVE)
北极-北方脆弱性实验(ABoVE)是美国国家航空航天局(NASA)陆地生态计划的一项实地活动,将于 2016 年至 2021 年期间在阿拉斯加和加拿大西部进行。北极和北方地区气候变化的速度比地球上其他任何地方都要快。ABoVE 试图更好地了解生态系统和社会对这一不断变化的环境的脆弱性和复原力。
空间覆盖范围: 在美国阿拉斯加州巴罗周围的四个地点收集数据。
ABoVE 站点名称:
域:ABoVE 核心区域
州/地区: 阿拉斯加阿拉斯加州(巴罗周围的研究地点)
网格单元:Ahh1Avv0Bh2Bv1
空间分辨率:沿 4 条长度不等(约 1 至 7 千米)的横断面进行 GPR 测量,每条痕迹之间的距离约为 0.5 米。机械探测包括沿每个断面进行若干次高密度勘测(在 100 米勘测线范围内每隔 1 米)。
时间范围:2013-08-10 至 2013-08-15
时间分辨率:GPR 痕迹之间的间隔为 0.5 秒。
研究区域:(所有经纬度均以十进制度表示)
| Site | Westernmost Longitude | Easternmost Longitude | Northernmost Latitude | Southernmost Latitude |
|---|---|---|---|---|
| Barrow, Alaska, USA | -156.820302 | -156.557655 | 71.312020 | 71.252975 |
数据文件信息:
本数据集共有五个数据文件,包括三个逗号分隔格式文件(*.csv)和两个形状文件(*.zip)。本节末尾还提供了四个辅助文件。
| File name | Description |
|---|---|
| lvl1_gpr_alt.csv | ALT and uncertainty derived from GPR |
| lvl1_gpr_alt.zip | ALT and uncertainty derived from GPR. When unzipped, this file provides a shapefile (.shp) file. This file contains the same variables as the corresponding .csv . This file is also provided as a companion file in .kmz format for viewing in Google Earth |
| prb_gpr_alt_hd.csv | ALT and uncertainties from probe measurements and from GPR |
| prb_gpr_alt_hd.zip | ALT and uncertainties from probe measurements and from GPR. When unzipped, this file provides a shapefile (.shp) file. This file contains the same variables as the corresponding .csv. This file is also provided as a companion file in .kmz format for viewing in Google Earth |
| probe_data.csv | ALT estimates from mechanical probing at four sites every 1 m within 100-m survey line along each transect |
数据文件中的变量
表 1.lvl1_gpr_alt.csv 和 lvl1_gpr_alt.zip 文件中的变量
数据文件中没有缺失值。
| Variable name (.csv files) | Variable name (.shp files) | Units/format | Description |
|---|---|---|---|
| site_ID | site_ID | Sites where ground measurements were made: CP (Central Plain), BS (Big Spot), CL (CALM), and UNB (Upper Nunavak Bay) | |
| lat_gpr | lat_gpr | Decimal degrees | Latitude of point where GPR measurements were made |
| lon_gpr | lon_gpr | Decimal degrees | Longitude of point where GPR measurements were made |
| alt_gpr | alt_gpr | m | ALT determined using GPR |
| unc_alt_gpr | unc_alt_gp | m | The corresponding uncertainty in calculated ALT determined using GPR |
表 2.文件 prb_gpr_alt_hd.csv 和 prb_gpr_alt_hd.zip 中的变量。文件名中的 HD 代表高密度 100 米调查。缺失数据以 -999 表示。
| Variable name (.csv files) | Variable name (.shp files) | Units/format | Description |
|---|---|---|---|
| site_ID | site_ID | Sites where ground measurements were made: CP (Central Plain), BS (Big Spot), or CL (CALM) | |
| lat_prb | lat_prb | Decimal degrees | Latitude of point where probe measurements were made |
| lon_prb | lon_prb | Decimal degrees | Longitude of point where probe measurements were made |
| alt_prb | alt_prb | m | ALT determined using probe |
| unc_alt_prb | unc_alt_pr | m | The corresponding uncertainty in calculated ALT with a probe |
| lat_gpr | lat_gpr | Decimal degrees | Latitude of point where GPR measurements were made determined with a handheld Global Positioning System (GPS) unit linked to the system |
| lon_gpr | lon_gpr | Decimal degrees | Longitude of point where GPR measurements were made determined with a handheld Global Positioning System (GPS) unit linked to the system |
| owtt | owtt | ns [nano seconds] | One-way GPR wave transit time. The unit was a Malå CUII GPR unit with a 500 MHz shielded antenna. A Global Positioning System (GPS) unit was attached to the system to record the location of each trace. |
| velocity | velocity | m/ns | GPR wave velocity |
| unc_vel | unc_vel | m/ns | Uncertainty, GPR wave velocity |
| cv_vel | cv_vel | m/ns | Covariance coefficient of velocity (m/nano seconds) |
| alt_gpr | alt_gpr | m | ALT determined using GPR |
| unc_alt_gpr | unc_alt_gp | m | The corresponding uncertainty in calculated ALT determined using GPR |
| vwc | vwc | fraction of 1 | VWC of the active layer soil calculated at 3 to 8 calibration points per site where the probe measurement was exactly co-located with a GPR trace. |
| unc_vwc | unc_vwc | fraction of 1 | Uncertainty of the volumetric water content (VWC) |
表 3.文件 probe_data.csv 中的变量
在四个研究地点使用传统机械探测法测定的 ALT。变量名中的 HD 代表高密度 100 米勘测。所有测量均在 2013 年 8 月 10 日至 2013 年 8 月 15 日期间进行。探测时间和地点信息请参见下表 4。缺失数据以 -999 表示。
| Column(s) | Variable name | Units/format | Description |
| 1 | Distance | m | Distance along survey, 1 - 100 m |
| 2 - 3 | UNB_HD_1 and UNB_HD_2 | cm | ALT measurements at site UNB |
| 4 - 9 | BS_HD_x Where x is 1 – 5, 7 | cm | ALT measurements at site BS |
| 10 | CP_HD_1 | cm | ALT measurements at site CP |
| 11-16 | CL_HD_x Where x is 1 - 6 | cm | ALT measurements at site CL |
表 4.活动层厚度机械探测器勘测时间及起点和终点位置。联合国布宜诺斯艾利斯调查中缺少地面穿透雷达测量的高密度数据。
| Num | Code | Date | Start | Lat | Lon | End | Lat | Lon |
|---|---|---|---|---|---|---|---|---|
| 1 | UNB_1 | 2013-08-10 | 3:45 | 71.26644444 | -156.82070830 | 4:36 | 71.26555556 | -156.82041670 |
| 2 | UNB_2 | 2013-08-10 | 5:22 | 71.26275000 | -156.80930560 | 5:45 | 71.26336111 | -156.81108330 |
| 3 | BS_1 | 2013-08-11 | 9:40 | 71.26152778 | -156.61797222 | 10:27 | 71.26161111 | -156.61533333 |
| 4 | BS_2 | 2013-08-11 | 11:00 | 71.25977778 | -156.59388889 | 11:38 | 71.25902778 | -156.59338889 |
| 5 | BS_3 | 2013-08-11 | 12:55 | 71.25708333 | -156.56508333 | 1:23 | 71.25661111 | -156.56283333 |
| 6 | BS_4 | 2013-08-11 | 2:05 | 71.25566667 | -156.55086111 | 2:36 | 71.25536111 | -156.54836111 |
| 7 | BS_5 | 2013-08-12 | 1:15 | 71.25583333 | -156.55372222 | 1:37 | 71.25492222 | -156.55313889 |
| 8 | BS_7 | 2013-08-12 | 2:35 | 71.24638889 | -156.55869444 | 3:11 | 71.24666667 | -156.56113889 |
| 9 | CP_1 | 2013-08-12 | 11:13 | 71.27336111 | -156.63983333 | 11:58 | 71.27380556 | -156.63794444 |
| 10 | CL_1 | 2013-08-14 | 9:55 | 71.32127778 | -156.61750000 | 10:26 | 71.32072222 | -156.61952778 |
| 11 | CL_2 | 2013-08-14 | 11:30 | 71.31127778 | -156.63036111 | 11:52 | 71.31063889 | -156.62900000 |
| 12 | CL_3 | 2013-08-14 | 1:11 | 71.30433333 | -156.61033333 | 1:36 | 71.30513889 | -156.61147222 |
| 13 | CL_4 | 2013-08-14 | 2:41 | 71.31540000 | -156.61094444 | 3:12 | 71.31622222 | -156.61347222 |
| 14 | CL_5 | 2013-08-15 | 11:09 | 71.31492000 | -156.59113000 | 11:32 | 71.31434000 | -156.58940000 |
| 15 | CL_6 | 2013-08-15 | 1:25 | 71.31026000 | -156.58823000 | 1:46 | 71.31112000 | -156.58922000 |
配套文件
本数据集提供了四个辅助文件:两个 *.kmz 文件、一个压缩(*.zip)目录,其中包含研究中 GPR 仪器的原始读数,以及一份描述 GPR 原始数据的文件(.pdf)。
| File name | Description |
| lvl1_gpr_alt.kmz | ALT and uncertainty derived from GPR. This file contains the same data as the corresponding shapefile and is provided for viewing in Google Earth |
| prb_gpr_alt_hd.kmz | ALT and uncertainties from probe measurements and from GPR. This file contains the same data as the corresponding shapefile and is provided for viewing in Google Earth |
| Raw_GPR_Data_Barrow_2013 | Raw GPR data. There are five folders of data. |
| ALT_GPR_Barrow.pdf | A pdf of this document |
应用与推导
ALT 是监测永久冻土状态的一个关键参数,通常在特定地点使用探测、原地温度传感器或其他地面观测方法进行测量。这些数据有助于比较探地雷达 (GPR) 作为估算冻土层 ALT 的方法的准确性。
数据采集、材料和方法
本数据集提供了 2013 年 8 月在阿拉斯加巴罗实地使用探地雷达 (GPR) 系统测定的永久冻土 ALT 和计算的不确定性。GPR 测量沿 4 条长度不等(约 1 至 7 千米)的横断面进行。传统的机械探测 ALT 估算包括沿每个横断面进行多次高密度勘测(100 米勘测线内每 1 米一次)。
GPR 和探针数据于 2013 年 8 月在实地收集。之所以选择这四个地点,是因为它们代表了巴罗地区常见的各种环境条件。
研究地点
四个研究地点包括
大斑(BS):该地点是一系列年龄不等的排水热卡湖盆地(DTLB)。之所以选择这个地点,是因为它代表了巴罗附近 DTLB 的典型情况。
CALM 遗址(CL): 该站点有两个大型 DTLB,中间隔着一条狭长的未受干扰苔原。选择该站点是为了评估大型 DTLB 内外的状况,同时也因为 CALM 网络中的两个巴罗站点 U1 和 U2 可以对 ALT 进行长期测量。U1 由一个 1 公里见方的测量点网格组成,这些测量点被称为节点,相距 100 米,自 1995 年以来一直采用探测方法测量 ALT。U2 也称为寒区研究与工程实验室 (CRREL) 站点,由一个 10 米见方的地块组成,随机放置了 320 个探针测量点。
中央平原站点(CP):该站点是由高中心多边形组成的矩阵,土壤完全饱和,冰楔上有积水。之所以选择这个地点,是因为它代表了巴罗周围典型的未受干扰苔原。
上努纳瓦克湾(UNB):该地点位于努纳瓦克流域的上部,就在巴罗机场的南面。该地点由未受干扰的冻原组成,三面被努纳瓦克河及其支流环绕。未受干扰的冻原由高心多边形矩阵组成,与中央平原类似,但冰楔上的积水较少。努纳瓦克河附近海拔下降 3-4 米,土壤完全饱和,没有多边形。之所以选择这个地点,是因为预计饱和和非饱和土壤条件混合存在。
总之,这四个地点代表了典型的未扰动苔原条件(中央平原)、排水土壤(努纳瓦克河)、最大和典型的 DTLB 条件(大点)以及具有最多 ALT 历史观测数据的大型 DTLB(CALM)(Jafarov 等人,2016 年,综述;Schafer 等人,2015 年)。
地面穿透雷达 (GPR)
2013 年 8 月,在四个验证地点使用 500 MHz GPR 进行了总长约 15 公里的 ALT 测量。选择在八月进行测量,是为了接近一年中活动层厚度最大的时间。GPR 使用脉冲射频电磁波对地下进行非侵入式成像。从发射天线发射的能量进入地下后,部分能量会反射回地表的接收天线,接收天线会记录下传播时间。当 GPR 装置沿着地面移动时,反射能量的数字化记录(称为轨迹)会以固定的时间间隔生成,一系列轨迹的图形表示就是雷达图。
GPR 设备是 Malå CUII,带有 500 兆赫屏蔽天线,安装在一个箱子里,以提供保护和稳定性。盒子顶部有一个 Garmin GPS 18 设备,用于记录 GPR 的位置。活动层底部的反射在原始数据中清晰可见,因此不需要数据滤波器。取而代之的是标准的时间零点校正,将第一个到达的位置设为每个轨迹的时间零点,并直接从雷达图中手工数字化出清晰的反射事件。作为一种质量控制措施,对雷达反射信号进行人工数字化(通常称为拾取),以验证信号并减少由于虚假反射造成的解释错误。根据天线频率和活动层的物理特性,GPR 迹线代表了小于 0.15 平方米足迹的 ALT 值(Jafarov 等人,2016 年,回顾中;Schafer 等人,2015 年)。

图 2.GPR 设备安装照片
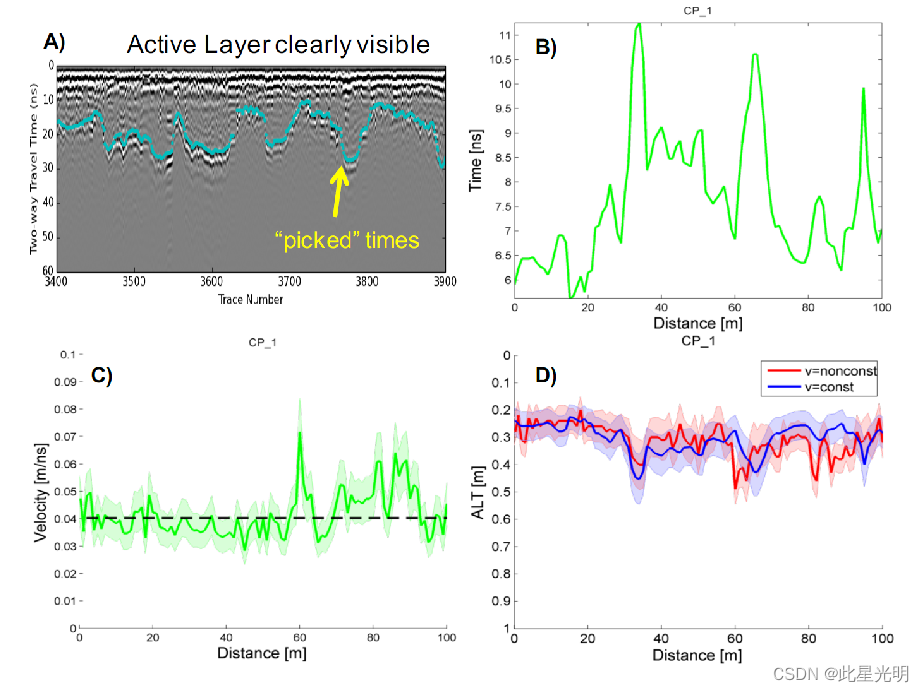
图 3.GPR 信号处理工作流程:A) 采集可见 GPR 移动时间;B) 单程移动时间;C) 根据探测到的活动层厚度 (ALT) 和单程移动时间计算出的速度;D) 使用恒定和非恒定速度计算出的 ALT
机械探测
大约每隔一公里进行一次机械探测,以校准用于将双向传输时间转换为 ALT 的 GPR 波速。对于每个校准探头,我们取 GPR 天线附近三个探头测量值的平均值。此外,我们还沿着 GPR 轨道铺设了一条 100 米长的测量线,并使用机械探头每隔一米进行一次 ALT 测量。这些高密度探头测量结果用于校准每个研究地点的平均波速和标准偏差。通过计算波速的标准偏差,估算出土壤水分变化对 GPR ALT 造成的不确定性。
土壤容积含水量 (VWC)
在每个站点的 3-8 个校准点计算活动层土壤的体积含水量,这些校准点的探头测量值与 GPR 跟踪精确定位。大多数校准点都使用了 Engstrom 等人 2005 年针对巴罗活跃层土壤开发的经验 VWC 模型。为了获得最可靠的结果,只使用了有 GPR 迹线的探头位置。根据记录的 "GPR 时间",从原始 GPR 数据中提取探头测量距离 GPR 天线约 20 厘米范围内的轨迹的单向移动时间,以提供准确的相关轨迹。计算 VWC 时选择了 90% 的阈值。大于指定阈值的一切都与纯水有关,不包括在校准数据集中
代码
!pip install leafmap
!pip install pandas
!pip install folium
!pip install matplotlib
!pip install mapclassifyimport pandas as pd
import leafmapurl = "https://github.com/opengeos/NASA-Earth-Data/raw/main/nasa_earth_data.tsv"
df = pd.read_csv(url, sep="\t")
dfleafmap.nasa_data_login()results, gdf = leafmap.nasa_data_search(short_name="ALT_GPR_Barrow_1355",cloud_hosted=True,bounding_box=(-157.27, 71.03, -155.77, 71.39),temporal=("2013-08-10", "2013-08-15"),count=-1, # use -1 to return all datasetsreturn_gdf=True,
)gdf.explore()#leafmap.nasa_data_download(results[:5], out_dir="data")引用
Jafarov, E., A. Parsekian, K. Schaefer, L. Liu, A. Chen, S.K. Panda, and T. Zhang. 2018. Pre-ABoVE: Active Layer Thickness and Soil Water Content, Barrow, Alaska, 2013. ORNL DAAC, Oak Ridge, Tennessee, USA. Pre-ABoVE: Active Layer Thickness and Soil Water Content, Barrow, Alaska, 2013, https://doi.org/10.3334/ORNLDAAC/1355
网址推荐
机器学习
https://www.cbedai.net/xg
相关文章:
2013年 阿拉斯加巴罗活动层厚度和土壤含水量
Pre-ABoVE: Active Layer Thickness and Soil Water Content, Barrow, Alaska, 2013 ABoVE前:阿拉斯加巴罗活动层厚度和土壤含水量,2013年 简介 文件修订日期:2018-01-10 数据集版本:1 摘要 该数据集提供了 2013 年 8 月在…...

超详解——python数字和运算——小白篇
目录 1.位运算 2. 常用内置函数/模块 math模块: random模块: decimal模块: 3.内置函数: 总结: 1.位运算 位运算是对整数在内存中的二进制表示进行操作。Python支持以下常见的位运算符: 按位与&…...
LabVIEW图像采集处理项目中相机选择与应用
在LabVIEW图像采集处理项目中,选择合适的相机是确保项目成功的关键。本文将详细探讨相机选择时需要关注的参数、黑白相机与彩色相机的区别及其适用场合,帮助工程师和开发者做出明智的选择。 相机选择时需要关注的参数 1. 分辨率 定义:分辨率…...
Java——IO流(一)-(2/9):File类的常用方法(判断文件类型、获取文件信息、创建删除文件、遍历文件夹)
目录 常用方法1:判断文件类型、获取文件信息 方法 实例演示 常用方法2:创建文件、删除文件 方法 实例演示 常用方法3:遍历文件夹 方法 实例演示 常用方法1:判断文件类型、获取文件信息 方法 File提供的判断文件类型、获…...

电子设计入门教程硬件篇之集成电路IC(二)
前言:本文为手把手教学的电子设计入门教程硬件类的博客,该博客侧重针对电子设计中的硬件电路进行介绍。本篇博客将根据电子设计实战中的情况去详细讲解集成电路IC,这些集成电路IC包括:逻辑门芯片、运算放大器与电子零件。电子设计…...

Unity3D测量面积和角度实现方法(二)
系列文章目录 unity工具 文章目录 系列文章目录👉前言👉一、unity测量面积👉1-1 视频效果👉1-2 先创建预制体👉1-3 在创建LineRenderer预制体👉1-4 代码如下 👉二、测量平面和测量空间切换&…...

vite 配置 typescript 环境
要在 Vite 项目中配置 TypeScript 环境,你需要遵循几个步骤来确保 TypeScript 被正确设置并可以与 Vite 一起工作。以下是一个基本的指南: 初始化项目 如果你还没有初始化项目,可以使用 npm 或 yarn 初始化一个新的项目: npm i…...
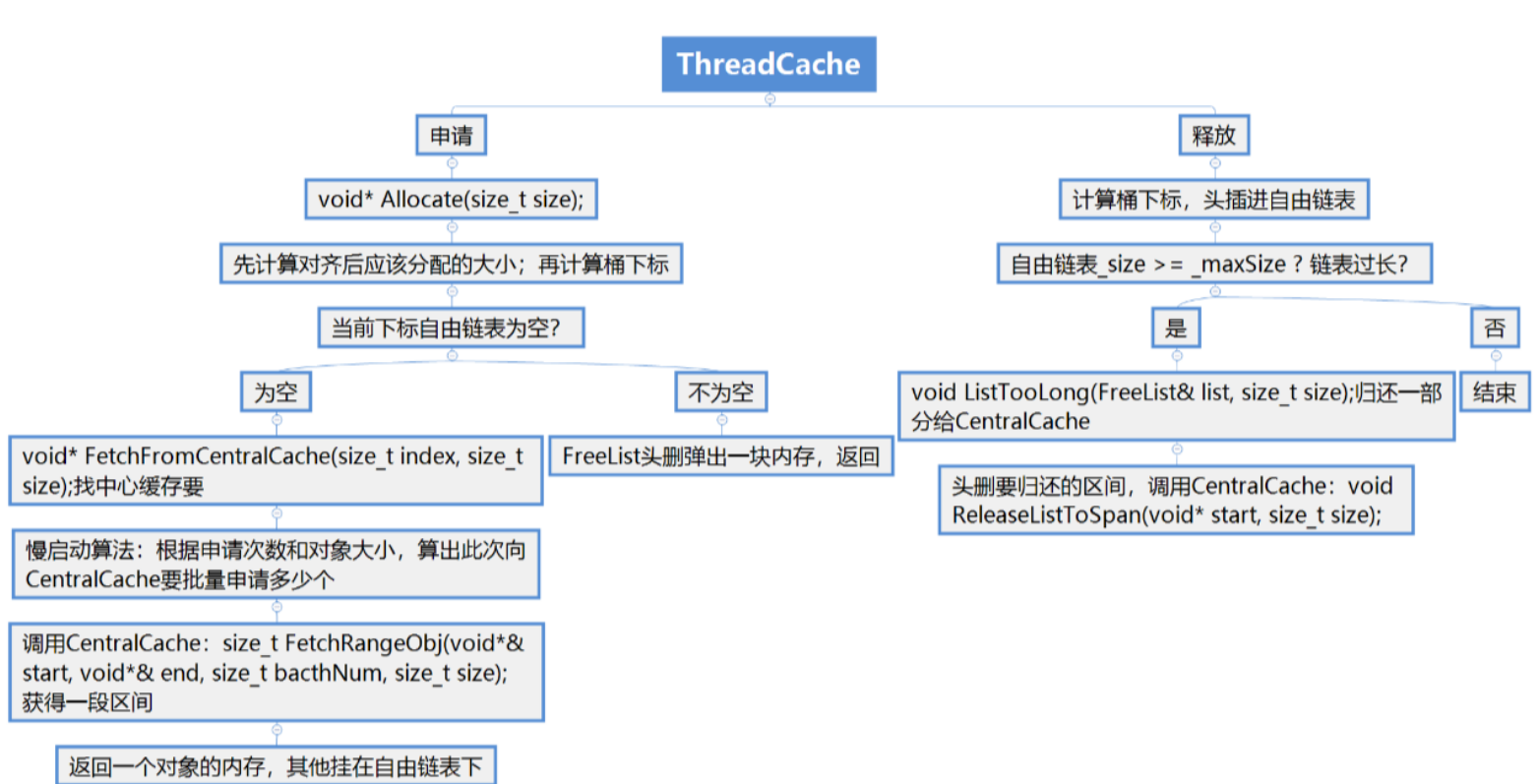
ThreadCache线程缓存
一.ThreadCache整体结构 1.基本结构 定长内存池利用一个自由链表管理释放回来的固定大小的内存obj。 ThreadCache需要支持申请和释放不同大小的内存块,因此需要多个自由链表来管理释放回来的内存块.即ThreadCache实际上一个哈希桶结构,每个桶中存放的都…...
 转 UTexture)
UE5_加载本地图片(jpg, png) 转 UTexture
UE5_加载图片到UTexture __Desc使用方式源码 __Desc __Time__: 2024-06-05 16:30 __Author__: Yblackd __Desc__: UE5.2 加载本地图片 转 UTexture2D, 给材质 和 UMG 使用使用方式 新建继承BlueprintFunctionLibrary c 类复制下面源码,修改类名实测加载 jpg,jpeg,…...

Linux操作系统:Spark在虚拟环境下的安装及部署
将Spark安装到指定目录 // 通过wget下载Spark安装包 $ wget https://d3kbcqa49mib13.cloudfront.net/spark-2.1.1-bin-hadoop2.7.tgz // 将spark解压到安装目录 $ tar –zxvf spark-2.1.1-bin-hadoop2.7.tgz –C /usr/local/ // 重命名 $ mv /usr/local/spark-2.1.1-bin-hado…...
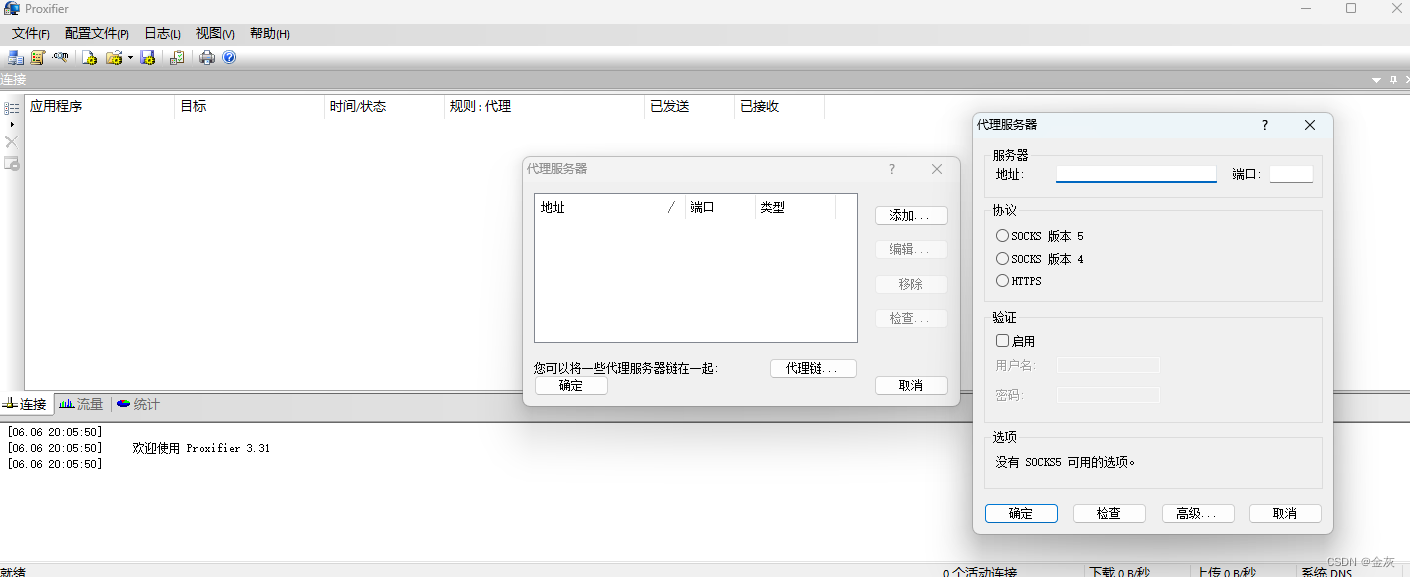
内网安全--隧道技术代理技术
注:本文仅做技术交流,请勿非法破坏... 目录 项目: 1-Ngrok 用法 2-Frp 用法 3-Nps 用法 4-Spp 用法 工具: windows下: Proxifier(推荐~) Sockscap ccproxy Linux下: Proxychains 用法 http://t.csdnimg.cn/88Ew7 隧道技术:解决不出网协议上线的问…...
彩虹易支付最新版源码
源码简介 彩虹易支付最新版源码,更新时间为5.1号 2024/05/01: 1.更换全新的手机版支付页面风格 2.聚合收款码支持填写备注 3.后台支付统计新增利润、代付统计 4.删除结算记录支持直接退回商户金额 安装环境 1.PHP版本>7.4 2.Mysql数据库 安装教…...
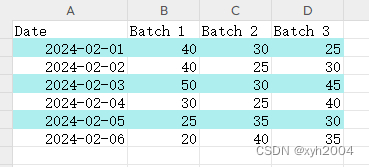
python生成excel数据并实现隔行变色
代码 from openpyxl import Workbook from datetime import date from openpyxl.styles import PatternFilldef create_excel():wb Workbook()sh wb.activerows [[Date, Batch 1, Batch 2, Batch 3],[date(2024, 2, 1), 40, 30, 25],[date(2024, 2, 2), 40, 25, 30],[date(…...

IEEE754 十进制数转32位浮点数格式
为了将十进制数37.25转换为IEEE 754短浮点数格式(32位),我们需要按照以下步骤进行: IEEE 754标准结构 IEEE 754标准的单精度浮点数(32位)格式如下: 1位符号位(S)8位指…...

JVM内存分析之JVM分区与介绍
JVM(Java Virtual Machine)作为Java平台的核心组件,为Java应用程序的运行提供了一个虚拟的计算机环境。为了更好地理解和优化Java应用程序的性能,对JVM的内存管理进行深入分析是至关重要的。本文将详细介绍JVM的内存分区及其功能。…...
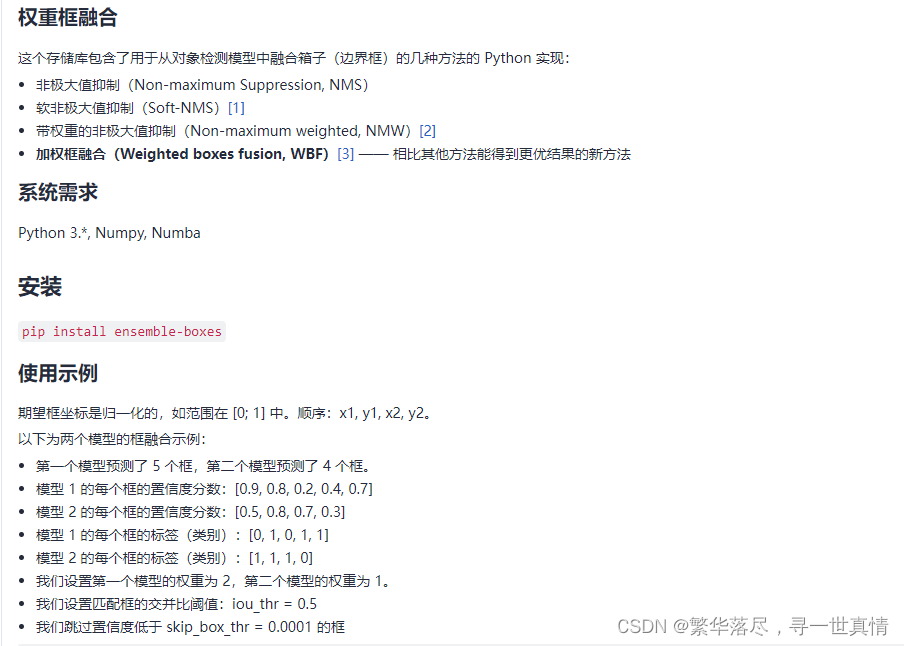
多目标检测模型加权框集成
优秀项目推荐:https://gitcode.com/ZFTurbo/Weighted-Boxes-Fusion/overview 参考链接: 目标检测加权框融合 WBF原理讲解 https://blog.csdn.net/YXD0514/article/details/132574588 目标检测加权框融合 WBF原理讲解(Weighted Boxes Fusion&…...
转型AI产品经理(6):“ 序列位置效应”如何应用在Chatbot产品中
序列位置效应是心理学中的一个记忆现象,指的是人们对一系列信息的记忆效果受到信息在序列中位置的影响。具体来说,人们通常更容易记住列表的开头和结尾部分的项目,而对中间部分的项目记忆较差。这个效应可以进一步分为“首因效应”和“近因效…...
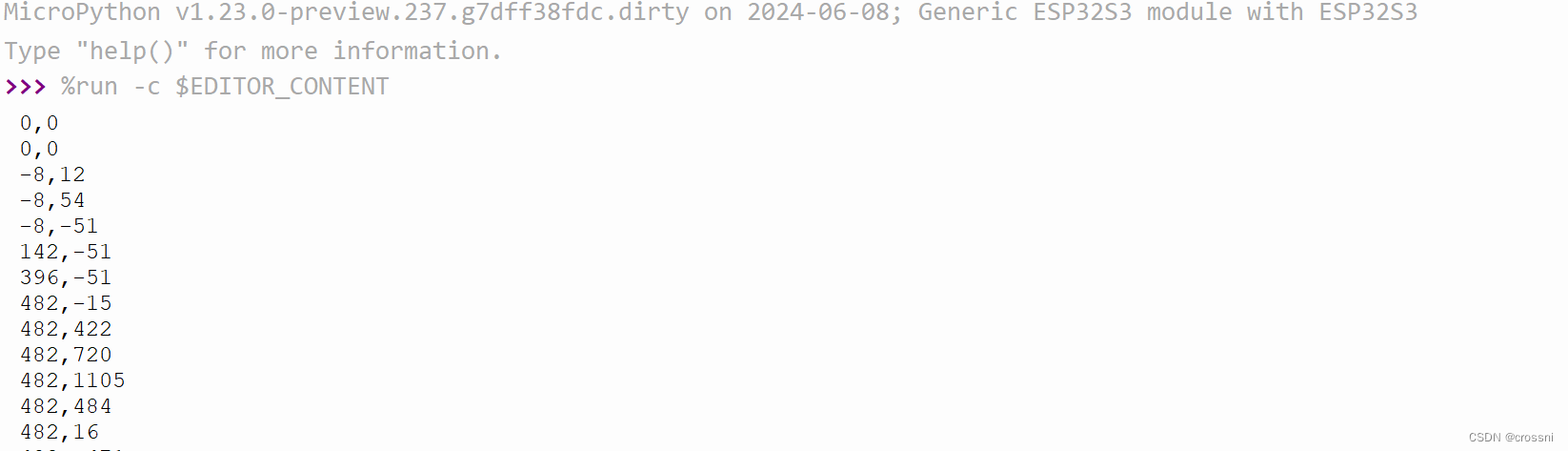
ESP32:往MicroPython集成PCNT以支持硬件正交编码器
背景 官方发布的1.23依然没有在ESP32中集成PCNT功能。考虑到硬件的PCNT模块可以提供4倍的编码精度(对比使用PIn IRQ),还能提供硬件去毛刺。 还是自己集成一下吧。 实际上Github上早在2022年1月的时候就已经有人建议了将PCNT加入正式版本的功…...
Unity基础实践小项目
项目流程: 需求分析 开始界面 选择角色面板 排行榜面板 设置面板 游戏面板 确定退出面板 死亡面板 UML类图 准备工作 1.导入资源 2.创建需要的文件夹 3.创建好面板基类 开始场景 开始界面 1.拼面板 2.写脚本 注意事项:注意先设置NGUI的分辨率大小&…...

Set up a WordPress blog with Nginx
CentOS7 配置Nginx域名HTTPS Here is the revised guideline for setting up a WordPress blog with Nginx: Step 1: Install Nginx, MySQL, and PHP (LEMP Stack) Install Nginx: sudo yum install nginx sudo systemctl start nginx sudo systemctl enable nginxInstall MyS…...

多自由度冗余空间机械臂位姿一体化规划与控制【附代码】
✨ 长期致力于空间机械臂、对偶四元数、位姿一体化、路径规划、跟踪控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于对偶四元数的冗余机械臂运…...

为Alchitry Au FPGA开发板外接JTAG接口的完整指南
1. 项目概述与核心价值如果你正在使用基于Xilinx Artix-7 FPGA的Alchitry Au或Au开发板,并且已经厌倦了每次调试或烧录都要依赖板载的USB-JTAG桥接芯片,或者你的项目已经将板载USB接口挪作他用,那么为你的开发板外接一个独立的JTAG调试器&…...

MAX78000移植Zephyr RTOS实战:从BSP创建到AI边缘设备开发
1. 项目概述与动机作为一名长期在嵌入式边缘AI和机器人领域摸爬滚打的开发者,我最近把目光投向了一块相当有潜力的板子:Maxim Integrated(现为ADI一部分)的MAX78000FTHR开发套件。这块板子的核心——MAX78000微控制器,…...

pan-baidu-download:百度网盘多线程下载加速器架构解析与性能优化指南
pan-baidu-download:百度网盘多线程下载加速器架构解析与性能优化指南 【免费下载链接】pan-baidu-download 百度网盘下载脚本 项目地址: https://gitcode.com/gh_mirrors/pa/pan-baidu-download pan-baidu-download是一款基于Python开发的百度网盘命令行下载…...

基于MAX78000的离线鸟类声音识别:边缘AI从数据到部署全流程解析
1. 项目概述:当边缘AI“听懂”鸟鸣在野外生态监测或自家后院观鸟时,你是否有过这样的经历:听到一阵清脆或婉转的鸟鸣,却完全不知道是哪位“歌唱家”在表演?传统的鸟类识别依赖专家经验和图鉴比对,不仅门槛高…...

LizzieYzy:你的智能围棋教练,让AI分析变得简单有趣 [特殊字符]
LizzieYzy:你的智能围棋教练,让AI分析变得简单有趣 🎯 【免费下载链接】lizzieyzy LizzieYzy - GUI for Game of Go 项目地址: https://gitcode.com/gh_mirrors/li/lizzieyzy 还在为复盘找不到关键点而烦恼吗?想提升棋力却…...

基于Netburner NANO54415构建工业级嵌入式Web服务器:从硬件选型到广域监控实战
1. 项目概述:一个为广域与本地监控而生的嵌入式Web服务器如果你正在寻找一个能部署在野外、工厂角落或者任何需要远程数据采集与控制场景下的嵌入式Web服务器方案,并且对市面上那些要么性能孱弱、要么开发门槛极高的开发板感到厌倦,那么这个基…...

终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生
终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 还在为经…...

ModernWMS核心功能详解:从ASN入库到Dispatch出库的完整工作流
ModernWMS核心功能详解:从ASN入库到Dispatch出库的完整工作流 【免费下载链接】ModernWMS The open source simple and complete warehouse management system is derived from our many years of experience in implementing erp projects. We stripped the origin…...

XZ1018,100V,40A,NMOS 封装:TO252
封装:TO252类型:NVDS:100V VGS: 20V ID:40ARDS(ON):10V <14mΩRDS(ON):4.5V <19mΩ型号: XZ1018 封装:TO252类型…...