让GNSSRTK不再难【第二天-第7部分2】
状态更新计算过程:
-
计算卡尔曼增益:
根据预测的误差协方差矩阵 P k − P_k^- Pk− 和观测噪声协方差矩阵 R R R 计算卡尔曼增益 K k K_k Kk:
K k = P k − H T ( H P k − H T + R ) − 1 K_k = P_k^- H^T (H P_k^- H^T + R)^{-1} Kk=Pk−HT(HPk−HT+R)−1带入预测的 P k − P_k^- Pk− 和 R R R 计算:
P k − = [ C o v X X 0 0 0 0 0 0 C o v Y Y 0 0 0 0 0 0 C o v Z Z 0 0 0 0 0 0 C o v δ t δ t 0 0 0 0 0 0 ∗ ∗ 0 0 0 0 ∗ ∗ ] P_k^- = \begin{bmatrix} Cov_{XX} & 0 & 0 & 0 & 0 & 0 \\ 0 & Cov_{YY} & 0 & 0 & 0 & 0 \\ 0 & 0 & Cov_{ZZ} & 0 & 0 & 0 \\ 0 & 0 & 0 & Cov_{\delta t \delta t} & 0 & 0 \\ 0 & 0 & 0 & 0 & * & * \\ 0 & 0 & 0 & 0 & * & * \\ \end{bmatrix} Pk−= CovXX000000CovYY000000CovZZ000000Covδtδt000000∗∗0000∗∗
R = [ σ 1 2 0 ⋯ 0 0 σ 2 2 ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ σ n 2 ] R = \begin{bmatrix} \sigma_1^2 & 0 & \cdots & 0 \\ 0 & \sigma_2^2 & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & \sigma_n^2 \\ \end{bmatrix} R= σ120⋮00σ22⋮0⋯⋯⋱⋯00⋮σn2
假设观测矩阵 H H H 为设计矩阵 A A A:
A = [ l f 1 G 1 m f 1 G 1 n f 1 G 1 − 1 0 0 0 l f 2 G 2 m f 2 G 2 n f 2 G 2 − 1 0 0 0 l f 3 G 3 m f 3 G 3 n f 3 G 3 − 1 0 0 0 ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ l f n G n m f n G n n f n G n − 1 0 0 0 l f 1 C 1 m f 1 C 1 n f 1 C 1 − 1 0 − 1 0 l f 2 C 2 m f 2 C 2 n f 2 C 2 − 1 0 − 1 0 l f 3 C 3 m f 3 C 3 n f 3 C 3 − 1 0 − 1 0 ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ l f n C n m f n C n n f n C n − 1 0 − 1 0 ] A = \begin{bmatrix} l_{f_1}^{G_1} & m_{f_1}^{G_1} & n_{f_1}^{G_1} & -1 & 0 & 0 & 0 \\ l_{f_2}^{G_2} & m_{f_2}^{G_2} & n_{f_2}^{G_2} & -1 & 0 & 0 & 0 \\ l_{f_3}^{G_3} & m_{f_3}^{G_3} & n_{f_3}^{G_3} & -1 & 0 & 0 & 0 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ l_{f_n}^{G_n} & m_{f_n}^{G_n} & n_{f_n}^{G_n} & -1 & 0 & 0 & 0 \\ l_{f_1}^{C_1} & m_{f_1}^{C_1} & n_{f_1}^{C_1} & -1 & 0 & -1 & 0 \\ l_{f_2}^{C_2} & m_{f_2}^{C_2} & n_{f_2}^{C_2} & -1 & 0 & -1 & 0 \\ l_{f_3}^{C_3} & m_{f_3}^{C_3} & n_{f_3}^{C_3} & -1 & 0 & -1 & 0 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ l_{f_n}^{C_n} & m_{f_n}^{C_n} & n_{f_n}^{C_n} & -1 & 0 & -1 & 0 \end{bmatrix} A= lf1G1lf2G2lf3G3⋮lfnGnlf1C1lf2C2lf3C3⋮lfnCnmf1G1mf2G2mf3G3⋮mfnGnmf1C1mf2C2mf3C3⋮mfnCnnf1G1nf2G2nf3G3⋮nfnGnnf1C1nf2C2nf3C3⋮nfnCn−1−1−1⋮−1−1−1−1⋮−1000⋮0000⋮0000⋮0−1−1−1⋮−1000⋮0000⋮0
则卡尔曼增益 K k K_k Kk 计算为:
K k = P k − A T ( A P k − A T + R ) − 1 K_k = P_k^- A^T (A P_k^- A^T + R)^{-1} Kk=Pk−AT(APk−AT+R)−1(1)计算 A P k − A T A P_k^- A^T APk−AT:
A P k − A T = A [ C o v X X 0 0 0 0 0 0 C o v Y Y 0 0 0 0 0 0 C o v Z Z 0 0 0 0 0 0 C o v δ t δ t 0 0 0 0 0 0 ∗ ∗ 0 0 0 0 ∗ ∗ ] A T A P_k^- A^T = A \begin{bmatrix} Cov_{XX} & 0 & 0 & 0 & 0 & 0 \\ 0 & Cov_{YY} & 0 & 0 & 0 & 0 \\ 0 & 0 & Cov_{ZZ} & 0 & 0 & 0 \\ 0 & 0 & 0 & Cov_{\delta t \delta t} & 0 & 0 \\ 0 & 0 & 0 & 0 & * & * \\ 0 & 0 & 0 & 0 & * & * \\ \end{bmatrix} A^T APk−AT=A CovXX000000CovYY000000CovZZ000000Covδtδt000000∗∗0000∗∗ AT(2)计算 A P k − A T + R A P_k^- A^T + R APk−AT+R:
A P k − A T + R = A [ C o v X X 0 0 0 0 0 0 C o v Y Y 0 0 0 0 0 0 C o v Z Z 0 0 0 0 0 0 C o v δ t δ t 0 0 0 0 0 0 ∗ ∗ 0 0 0 0 ∗ ∗ ] A T + R A P_k^- A^T + R = A \begin{bmatrix} Cov_{XX} & 0 & 0 & 0 & 0 & 0 \\ 0 & Cov_{YY} & 0 & 0 & 0 & 0 \\ 0 & 0 & Cov_{ZZ} & 0 & 0 & 0 \\ 0 & 0 & 0 & Cov_{\delta t \delta t} & 0 & 0 \\ 0 & 0 & 0 & 0 & * & * \\ 0 & 0 & 0 & 0 & * & * \\ \end{bmatrix} A^T + R APk−AT+R=A CovXX000000CovYY000000CovZZ000000Covδtδt000000∗∗0000∗∗ AT+R由于 A P k − A T + R A P_k^- A^T + R APk−AT+R 是对角矩阵,其逆矩阵为:
( A P k − A T + R ) − 1 = [ ( C o v X X + σ 1 2 ) − 1 0 0 0 ( C o v Y Y + σ 2 2 ) − 1 0 0 0 ( C o v Z Z + σ 3 2 ) − 1 ] (A P_k^- A^T + R)^{-1} = \begin{bmatrix} (Cov_{XX} + \sigma_1^2)^{-1} & 0 & 0 \\ 0 & (Cov_{YY} + \sigma_2^2)^{-1} & 0 \\ 0 & 0 & (Cov_{ZZ} + \sigma_3^2)^{-1} \\ \end{bmatrix} (APk−AT+R)−1= (CovXX+σ12)−1000(CovYY+σ22)−1000(CovZZ+σ32)−1 (3)计算 K k K_k Kk:
K k = P k − A T ( A P k − A T + R ) − 1 K_k = P_k^- A^T (A P_k^- A^T + R)^{-1} Kk=Pk−AT(APk−AT+R)−1带入 P k − P_k^- Pk− 和 ( A P k − A T + R ) − 1 (A P_k^- A^T + R)^{-1} (APk−AT+R)−1:
K k = [ C o v X X 0 0 0 C o v Y Y 0 0 0 C o v Z Z 0 0 0 0 0 0 0 0 0 0 0 0 ] A T [ ( C o v X X + σ 1 2 ) − 1 0 0 0 ( C o v Y Y + σ 2 2 ) − 1 0 0 0 ( C o v Z Z + σ 3 2 ) − 1 ] K_k = \begin{bmatrix} Cov_{XX} & 0 & 0 \\ 0 & Cov_{YY} & 0 \\ 0 & 0 & Cov_{ZZ} \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} A^T \begin{bmatrix} (Cov_{XX} + \sigma_1^2)^{-1} & 0 & 0 \\ 0 & (Cov_{YY} + \sigma_2^2)^{-1} & 0 \\ 0 & 0 & (Cov_{ZZ} + \sigma_3^2)^{-1} \\ \end{bmatrix} Kk= CovXX0000000CovYY0000000CovZZ0000 AT (CovXX+σ12)−1000(CovYY+σ22)−1000(CovZZ+σ32)−1 简化计算得到:
K k = [ C o v X X ( C o v X X + σ 1 2 ) − 1 0 0 0 C o v Y Y ( C o v Y Y + σ 2 2 ) − 1 0 0 0 C o v Z Z ( C o v Z Z + σ 3 2 ) − 1 0 0 0 0 0 0 0 0 0 0 0 0 ] K_k = \begin{bmatrix} Cov_{XX} (Cov_{XX} + \sigma_1^2)^{-1} & 0 & 0 \\ 0 & Cov_{YY} (Cov_{YY} + \sigma_2^2)^{-1} & 0 \\ 0 & 0 & Cov_{ZZ} (Cov_{ZZ} + \sigma_3^2)^{-1} \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} Kk= CovXX(CovXX+σ12)−10000000CovYY(CovYY+σ22)−10000000CovZZ(CovZZ+σ32)−10000 因此,卡尔曼增益 K k K_k Kk 为:
K k = [ C o v X X C o v X X + σ 1 2 0 0 0 C o v Y Y C o v Y Y + σ 2 2 0 0 0 C o v Z Z C o v Z Z + σ 3 2 0 0 0 0 0 0 0 0 0 0 0 0 ] K_k = \begin{bmatrix} \frac{Cov_{XX}}{Cov_{XX} + \sigma_1^2} & 0 & 0 \\ 0 & \frac{Cov_{YY}}{Cov_{YY} + \sigma_2^2} & 0 \\ 0 & 0 & \frac{Cov_{ZZ}}{Cov_{ZZ} + \sigma_3^2} \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} Kk= CovXX+σ12CovXX0000000CovYY+σ22CovYY0000000CovZZ+σ32CovZZ0000 -
更新状态估计:
根据观测值 z k z_k zk 和预测值 x ^ k − \hat{x}_k^- x^k− 进行状态更新:
x k = x ^ k − + K k ( z k − H x ^ k − ) x_k = \hat{x}_k^- + K_k (z_k - H \hat{x}_k^-) xk=x^k−+Kk(zk−Hx^k−)带入观测值 z k z_k zk 和预测值 x ^ k − \hat{x}_k^- x^k−:
假设 x ^ k − \hat{x}_k^- x^k− 为:
x ^ k − = [ x ^ k , 1 − x ^ k , 2 − x ^ k , 3 − ⋮ x ^ k , 7 − ] \hat{x}_k^- = \begin{bmatrix} \hat{x}_{k,1}^- \\ \hat{x}_{k,2}^- \\ \hat{x}_{k,3}^- \\ \vdots \\ \hat{x}_{k,7}^- \end{bmatrix} x^k−= x^k,1−x^k,2−x^k,3−⋮x^k,7− 观测值 z k z_k zk 为:
z k = [ z k , 1 z k , 2 z k , 3 ] z_k = \begin{bmatrix} z_{k,1} \\ z_{k,2} \\ z_{k,3} \end{bmatrix} zk= zk,1zk,2zk,3 假设观测矩阵 H H H 为设计矩阵 A A A:
A = [ l f 1 G 1 m f 1 G 1 n f 1 G 1 − 1 0 0 0 l f 2 G 2 m f 2 G 2 n f 2 G 2 − 1 0 0 0 l f 3 G 3 m f 3 G 3 n f 3 G 3 − 1 0 0 0 ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ l f n G n m f n G n n f n G n − 1 0 0 0 l f 1 C 1 m f 1 C 1 n f 1 C 1 − 1 0 − 1 0 l f 2 C 2 m f 2 C 2 n f 2 C 2 − 1 0 − 1 0 l f 3 C 3 m f 3 C 3 n f 3 C 3 − 1 0 − 1 0 ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ l f n C n m f n C n n f n C n − 1 0 − 1 0 ] A = \begin{bmatrix} l_{f_1}^{G_1} & m_{f_1}^{G_1} & n_{f_1}^{G_1} & -1 & 0 & 0 & 0 \\ l_{f_2}^{G_2} & m_{f_2}^{G_2} & n_{f_2}^{G_2} & -1 & 0 & 0 & 0 \\ l_{f_3}^{G_3} & m_{f_3}^{G_3} & n_{f_3}^{G_3} & -1 & 0 & 0 & 0 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ l_{f_n}^{G_n} & m_{f_n}^{G_n} & n_{f_n}^{G_n} & -1 & 0 & 0 & 0 \\ l_{f_1}^{C_1} & m_{f_1}^{C_1} & n_{f_1}^{C_1} & -1 & 0 & -1 & 0 \\ l_{f_2}^{C_2} & m_{f_2}^{C_2} & n_{f_2}^{C_2} & -1 & 0 & -1 & 0 \\ l_{f_3}^{C_3} & m_{f_3}^{C_3} & n_{f_3}^{C_3} & -1 & 0 & -1 & 0 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ l_{f_n}^{C_n} & m_{f_n}^{C_n} & n_{f_n}^{C_n} & -1 & 0 & -1 & 0 \end{bmatrix} A= lf1G1lf2G2lf3G3⋮lfnGnlf1C1lf2C2lf3C3⋮lfnCnmf1G1mf2G2mf3G3⋮mfnGnmf1C1mf2C2mf3C3⋮mfnCnnf1G1nf2G2nf3G3⋮nfnGnnf1C1nf2C2nf3C3⋮nfnCn−1−1−1⋮−1−1−1−1⋮−1000⋮0000⋮0000⋮0−1−1−1⋮−1000⋮0000⋮0
则状态更新为:
x k = [ x ^ k , 1 − x ^ k , 2 − x ^ k , 3 − ⋮ x ^ k , 7 − ] + K k ( [ z k , 1 z k , 2 z k , 3 ] − A [ x ^ k , 1 − x ^ k , 2 − x ^ k , 3 − ⋮ x ^ k , 7 − ] ) x_k = \begin{bmatrix} \hat{x}_{k,1}^- \\ \hat{x}_{k,2}^- \\ \hat{x}_{k,3}^- \\ \vdots \\ \hat{x}_{k,7}^- \end{bmatrix}+ K_k \left( \begin{bmatrix} z_{k,1} \\ z_{k,2} \\ z_{k,3} \end{bmatrix} - A \begin{bmatrix} \hat{x}_{k,1}^- \\ \hat{x}_{k,2}^- \\ \hat{x}_{k,3}^- \\ \vdots \\ \hat{x}_{k,7}^- \end{bmatrix} \right) xk= x^k,1−x^k,2−x^k,3−⋮x^k,7− +Kk zk,1zk,2zk,3 −A x^k,1−x^k,2−x^k,3−⋮x^k,7−
简化后:
x k = [ x ^ k , 1 − x ^ k , 2 − x ^ k , 3 − ⋮ x ^ k , 7 − ] + K k [ z k , 1 − ( A x ^ k − ) 1 z k , 2 − ( A x ^ k − ) 2 z k , 3 − ( A x ^ k − ) 3 ] x_k = \begin{bmatrix} \hat{x}_{k,1}^- \\ \hat{x}_{k,2}^- \\ \hat{x}_{k,3}^- \\ \vdots \\ \hat{x}_{k,7}^- \end{bmatrix}+ K_k \begin{bmatrix} z_{k,1} - (A \hat{x}_k^-)_{1} \\ z_{k,2} - (A \hat{x}_k^-)_{2} \\ z_{k,3} - (A \hat{x}_k^-)_{3} \end{bmatrix} xk= x^k,1−x^k,2−x^k,3−⋮x^k,7− +Kk zk,1−(Ax^k−)1zk,2−(Ax^k−)2zk,3−(Ax^k−)3 带入卡尔曼增益 K k K_k Kk 计算结果:
K k = [ C o v X X C o v X X + σ 1 2 0 0 0 C o v Y Y C o v Y Y + σ 2 2 0 0 0 C o v Z Z C o v Z Z + σ 3 2 0 0 0 0 0 0 0 0 0 0 0 0 ] K_k = \begin{bmatrix} \frac{Cov_{XX}}{Cov_{XX} + \sigma_1^2} & 0 & 0 \\ 0 & \frac{Cov_{YY}}{Cov_{YY} + \sigma_2^2} & 0 \\ 0 & 0 & \frac{Cov_{ZZ}}{Cov_{ZZ} + \sigma_3^2} \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} Kk= CovXX+σ12CovXX0000000CovYY+σ22CovYY0000000CovZZ+σ32CovZZ0000 最终状态更新为:
x k = [ x ^ k , 1 − x ^ k , 2 − x ^ k , 3 − ⋮ x ^ k , 7 − ] + [ C o v X X C o v X X + σ 1 2 0 0 0 C o v Y Y C o v Y Y + σ 2 2 0 0 0 C o v Z Z C o v Z Z + σ 3 2 0 0 0 0 0 0 0 0 0 0 0 0 ] [ z k , 1 − ( A x ^ k − ) 1 z k , 2 − ( A x ^ k − ) 2 z k , 3 − ( A x ^ k − ) 3 ] x_k = \begin{bmatrix} \hat{x}_{k,1}^- \\ \hat{x}_{k,2}^- \\ \hat{x}_{k,3}^- \\ \vdots \\ \hat{x}_{k,7}^- \end{bmatrix}+ \begin{bmatrix} \frac{Cov_{XX}}{Cov_{XX} + \sigma_1^2} & 0 & 0 \\ 0 & \frac{Cov_{YY}}{Cov_{YY} + \sigma_2^2} & 0 \\ 0 & 0 & \frac{Cov_{ZZ}}{Cov_{ZZ} + \sigma_3^2} \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \begin{bmatrix} z_{k,1} - (A \hat{x}_k^-)_{1} \\ z_{k,2} - (A \hat{x}_k^-)_{2} \\ z_{k,3} - (A \hat{x}_k^-)_{3} \end{bmatrix} xk= x^k,1−x^k,2−x^k,3−⋮x^k,7− + CovXX+σ12CovXX0000000CovYY+σ22CovYY0000000CovZZ+σ32CovZZ0000 zk,1−(Ax^k−)1zk,2−(Ax^k−)2zk,3−(Ax^k−)3 -
更新误差协方差矩阵:
更新误差协方差矩阵 P k P_k Pk:P k = ( I − K k A ) P k − P_k = (I - K_k A) P_k^- Pk=(I−KkA)Pk−
带入计算:
假设 I I I 为单位矩阵:
I = [ 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 ] I = \begin{bmatrix} 1 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 1 \\ \end{bmatrix} I= 1000000010000000100000001000000010000000100000001 卡尔曼增益 K k K_k Kk 为:
K k = [ C o v X X C o v X X + σ 1 2 0 0 0 C o v Y Y C o v Y Y + σ 2 2 0 0 0 C o v Z Z C o v Z Z + σ 3 2 0 0 0 0 0 0 0 0 0 0 0 0 ] K_k = \begin{bmatrix} \frac{Cov_{XX}}{Cov_{XX} + \sigma_1^2} & 0 & 0 \\ 0 & \frac{Cov_{YY}}{Cov_{YY} + \sigma_2^2} & 0 \\ 0 & 0 & \frac{Cov_{ZZ}}{Cov_{ZZ} + \sigma_3^2} \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} Kk= CovXX+σ12CovXX0000000CovYY+σ22CovYY0000000CovZZ+σ32CovZZ0000 假设观测矩阵 H H H 为设计矩阵 A A A:
A = [ l f 1 G 1 m f 1 G 1 n f 1 G 1 − 1 0 0 0 l f 2 G 2 m f 2 G 2 n f 2 G 2 − 1 0 0 0 l f 3 G 3 m f 3 G 3 n f 3 G 3 − 1 0 0 0 ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ l f n G n m f n G n n f n G n − 1 0 0 0 l f 1 C 1 m f 1 C 1 n f 1 C 1 − 1 0 − 1 0 l f 2 C 2 m f 2 C 2 n f 2 C 2 − 1 0 − 1 0 l f 3 C 3 m f 3 C 3 n f 3 C 3 − 1 0 − 1 0 ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ l f n C n m f n C n n f n C n − 1 0 − 1 0 ] A = \begin{bmatrix} l_{f_1}^{G_1} & m_{f_1}^{G_1} & n_{f_1}^{G_1} & -1 & 0 & 0 & 0 \\ l_{f_2}^{G_2} & m_{f_2}^{G_2} & n_{f_2}^{G_2} & -1 & 0 & 0 & 0 \\ l_{f_3}^{G_3} & m_{f_3}^{G_3} & n_{f_3}^{G_3} & -1 & 0 & 0 & 0 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ l_{f_n}^{G_n} & m_{f_n}^{G_n} & n_{f_n}^{G_n} & -1 & 0 & 0 & 0 \\ l_{f_1}^{C_1} & m_{f_1}^{C_1} & n_{f_1}^{C_1} & -1 & 0 & -1 & 0 \\ l_{f_2}^{C_2} & m_{f_2}^{C_2} & n_{f_2}^{C_2} & -1 & 0 & -1 & 0 \\ l_{f_3}^{C_3} & m_{f_3}^{C_3} & n_{f_3}^{C_3} & -1 & 0 & -1 & 0 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ l_{f_n}^{C_n} & m_{f_n}^{C_n} & n_{f_n}^{C_n} & -1 & 0 & -1 & 0 \end{bmatrix} A= lf1G1lf2G2lf3G3⋮lfnGnlf1C1lf2C2lf3C3⋮lfnCnmf1G1mf2G2mf3G3⋮mfnGnmf1C1mf2C2mf3C3⋮mfnCnnf1G1nf2G2nf3G3⋮nfnGnnf1C1nf2C2nf3C3⋮nfnCn−1−1−1⋮−1−1−1−1⋮−1000⋮0000⋮0000⋮0−1−1−1⋮−1000⋮0000⋮0 则更新误差协方差矩阵为:
P k = ( [ 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 ] − [ C o v X X C o v X X + σ 1 2 0 0 0 C o v Y Y C o v Y Y + σ 2 2 0 0 0 C o v Z Z C o v Z Z + σ 3 2 0 0 0 0 0 0 0 0 0 0 0 0 ] [ l f 1 G 1 m f 1 G 1 n f 1 G 1 − 1 0 0 0 l f 2 G 2 m f 2 G 2 n f 2 G 2 − 1 0 0 0 l f 3 G 3 m f 3 G 3 n f 3 G 3 − 1 0 0 0 ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ l f n G n m f n G n n f n G n − 1 0 0 0 l f 1 C 1 m f 1 C 1 n f 1 C 1 − 1 0 − 1 0 l f 2 C 2 m f 2 C 2 n f 2 C 2 − 1 0 − 1 0 l f 3 C 3 m f 3 C 3 n f 3 C 3 − 1 0 − 1 0 ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ l f n C n m f n C n n f n C n − 1 0 − 1 0 ] ) [ C o v X X 0 0 0 0 0 0 C o v Y Y 0 0 0 0 0 0 C o v Z Z 0 0 0 0 0 0 C o v δ t δ t 0 0 0 0 0 0 ∗ ∗ 0 0 0 0 ∗ ∗ ] P_k = \left( \begin{bmatrix} 1 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 1 \\ \end{bmatrix} - \begin{bmatrix} \frac{Cov_{XX}}{Cov_{XX} + \sigma_1^2} & 0 & 0 \\ 0 & \frac{Cov_{YY}}{Cov_{YY} + \sigma_2^2} & 0 \\ 0 & 0 & \frac{Cov_{ZZ}}{Cov_{ZZ} + \sigma_3^2} \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \begin{bmatrix} l_{f_1}^{G_1} & m_{f_1}^{G_1} & n_{f_1}^{G_1} & -1 & 0 & 0 & 0 \\ l_{f_2}^{G_2} & m_{f_2}^{G_2} & n_{f_2}^{G_2} & -1 & 0 & 0 & 0 \\ l_{f_3}^{G_3} & m_{f_3}^{G_3} & n_{f_3}^{G_3} & -1 & 0 & 0 & 0 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ l_{f_n}^{G_n} & m_{f_n}^{G_n} & n_{f_n}^{G_n} & -1 & 0 & 0 & 0 \\ l_{f_1}^{C_1} & m_{f_1}^{C_1} & n_{f_1}^{C_1} & -1 & 0 & -1 & 0 \\ l_{f_2}^{C_2} & m_{f_2}^{C_2} & n_{f_2}^{C_2} & -1 & 0 & -1 & 0 \\ l_{f_3}^{C_3} & m_{f_3}^{C_3} & n_{f_3}^{C_3} & -1 & 0 & -1 & 0 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ l_{f_n}^{C_n} & m_{f_n}^{C_n} & n_{f_n}^{C_n} & -1 & 0 & -1 & 0 \end{bmatrix} \right) \begin{bmatrix} Cov_{XX} & 0 & 0 & 0 & 0 & 0 \\ 0 & Cov_{YY} & 0 & 0 & 0 & 0 \\ 0 & 0 & Cov_{ZZ} & 0 & 0 & 0 \\ 0 & 0 & 0 & Cov_{\delta t \delta t} & 0 & 0 \\ 0 & 0 & 0 & 0 & * & * \\ 0 & 0 & 0 & 0 & * & * \\ \end{bmatrix} Pk= 1000000010000000100000001000000010000000100000001 − CovXX+σ12CovXX0000000CovYY+σ22CovYY0000000CovZZ+σ32CovZZ0000 lf1G1lf2G2lf3G3⋮lfnGnlf1C1lf2C2lf3C3⋮lfnCnmf1G1mf2G2mf3G3⋮mfnGnmf1C1mf2C2mf3C3⋮mfnCnnf1G1nf2G2nf3G3⋮nfnGnnf1C1nf2C2nf3C3⋮nfnCn−1−1−1⋮−1−1−1−1⋮−1000⋮0000⋮0000⋮0−1−1−1⋮−1000⋮0000⋮0 CovXX000000CovYY000000CovZZ000000Covδtδt000000∗∗0000∗∗ 进一步计算得到:进一步计算得到:
P k = ( [ 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 ] − [ C o v X X C o v X X + σ 1 2 0 0 0 C o v Y Y C o v Y Y + σ 2 2 0 0 0 C o v Z Z C o v Z Z + σ 3 2 0 0 0 0 0 0 0 0 0 0 0 0 ] ) [ C o v X X 0 0 0 0 0 0 C o v Y Y 0 0 0 0 0 0 C o v Z Z 0 0 0 0 0 0 C o v δ t δ t 0 0 0 0 0 0 ∗ ∗ 0 0 0 0 ∗ ∗ ] P_k = \left( \begin{bmatrix} 1 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 1 \\ \end{bmatrix} - \begin{bmatrix} \frac{Cov_{XX}}{Cov_{XX} + \sigma_1^2} & 0 & 0 \\ 0 & \frac{Cov_{YY}}{Cov_{YY} + \sigma_2^2} & 0 \\ 0 & 0 & \frac{Cov_{ZZ}}{Cov_{ZZ} + \sigma_3^2} \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \right) \begin{bmatrix} Cov_{XX} & 0 & 0 & 0 & 0 & 0 \\ 0 & Cov_{YY} & 0 & 0 & 0 & 0 \\ 0 & 0 & Cov_{ZZ} & 0 & 0 & 0 \\ 0 & 0 & 0 & Cov_{\delta t \delta t} & 0 & 0 \\ 0 & 0 & 0 & 0 & * & * \\ 0 & 0 & 0 & 0 & * & * \\ \end{bmatrix} Pk= 1000000010000000100000001000000010000000100000001 − CovXX+σ12CovXX0000000CovYY+σ22CovYY0000000CovZZ+σ32CovZZ0000 CovXX000000CovYY000000CovZZ000000Covδtδt000000∗∗0000∗∗ 最终得到:
P k = [ ( 1 − C o v X X C o v X X + σ 1 2 ) C o v X X 0 0 0 0 0 0 ( 1 − C o v Y Y C o v Y Y + σ 2 2 ) C o v Y Y 0 0 0 0 0 0 ( 1 − C o v Z Z C o v Z Z + σ 3 2 ) C o v Z Z 0 0 0 0 0 0 C o v δ t δ t 0 0 0 0 0 0 ∗ ∗ 0 0 0 0 ∗ ∗ ] P_k = \begin{bmatrix} \left(1 - \frac{Cov_{XX}}{Cov_{XX} + \sigma_1^2}\right) Cov_{XX} & 0 & 0 & 0 & 0 & 0 \\ 0 & \left(1 - \frac{Cov_{YY}}{Cov_{YY} + \sigma_2^2}\right) Cov_{YY} & 0 & 0 & 0 & 0 \\ 0 & 0 & \left(1 - \frac{Cov_{ZZ}}{Cov_{ZZ} + \sigma_3^2}\right) Cov_{ZZ} & 0 & 0 & 0 \\ 0 & 0 & 0 & Cov_{\delta t \delta t} & 0 & 0 \\ 0 & 0 & 0 & 0 & * & * \\ 0 & 0 & 0 & 0 & * & * \\ \end{bmatrix} Pk= (1−CovXX+σ12CovXX)CovXX000000(1−CovYY+σ22CovYY)CovYY000000(1−CovZZ+σ32CovZZ)CovZZ000000Covδtδt000000∗∗0000∗∗
16.2 站星双差Kalman滤波伪距差分定位流程
站星双差仅有位置状态量,所以其Kalman滤波流程更加简单。
对于时间更新步骤,基本就使用单点结果对概略位置进行填充,所以实际上已经降级为最小二乘,因为前后历元状态量在时间序列上不存在相关性。
但对于观测更新过程,观测值的方差需要考虑因星间作差引入的相关性。
对于没有做星间单差之前
V u d = [ p 1 p 2 p 3 p 4 ] R u d = [ σ 1 2 0 0 0 0 σ 2 2 0 0 0 0 σ 3 2 0 0 0 0 σ 4 2 ] V_{ud} = \begin{bmatrix} p^1 \\ p^2 \\ p^3 \\ p^4 \end{bmatrix} \quad R_{ud} = \begin{bmatrix} \sigma_1^2 & 0 & 0 & 0 \\ 0 & \sigma_2^2 & 0 & 0 \\ 0 & 0 & \sigma_3^2 & 0 \\ 0 & 0 & 0 & \sigma_4^2 \end{bmatrix} Vud= p1p2p3p4 Rud= σ120000σ220000σ320000σ42
星间单差之后
V s d = [ p 2 − p 1 p 3 − p 1 p 4 − p 1 ] R s d = [ σ 2 2 + σ 1 2 σ 2 2 + σ 1 2 σ 2 2 + σ 1 2 σ 1 2 + σ 3 2 σ 1 2 + σ 3 2 σ 1 2 + σ 3 2 σ 1 2 + σ 4 2 σ 1 2 + σ 4 2 σ 1 2 + σ 4 2 ] V_{sd} = \begin{bmatrix} p^2 - p^1 \\ p^3 - p^1 \\ p^4 - p^1 \end{bmatrix} \quad R_{sd} = \begin{bmatrix} \sigma_2^2 + \sigma_1^2 & \sigma_2^2 + \sigma_1^2 & \sigma_2^2 + \sigma_1^2 \\ \sigma_1^2 + \sigma_3^2 & \sigma_1^2 + \sigma_3^2 & \sigma_1^2 + \sigma_3^2 \\ \sigma_1^2 + \sigma_4^2 & \sigma_1^2 + \sigma_4^2 & \sigma_1^2 + \sigma_4^2 \end{bmatrix} Vsd= p2−p1p3−p1p4−p1 Rsd= σ22+σ12σ12+σ32σ12+σ42σ22+σ12σ12+σ32σ12+σ42σ22+σ12σ12+σ32σ12+σ42
其余流程相同,不再推导。
相关文章:

让GNSSRTK不再难【第二天-第7部分2】
状态更新计算过程: 计算卡尔曼增益: 根据预测的误差协方差矩阵 P k − P_k^- Pk− 和观测噪声协方差矩阵 R R R 计算卡尔曼增益 K k K_k Kk: K k P k − H T ( H P k − H T R ) − 1 K_k P_k^- H^T (H P_k^- H^T R)^{-1} KkPk…...

计算引擎:Flink核心概念
Apache Flink 是一个流处理框架,擅长处理实时数据流和批处理任务。Flink 提供了强大的功能来处理和分析大量数据。以下是 Flink 的核心概念: 1. DataStream 和 DataSet API DataStream API: 用于处理无界数据流,即不断生成和流动的数据。例如,传感器数据、日志等。DataSet…...
技术前沿 |【大模型InstructBLIP进行指令微调】
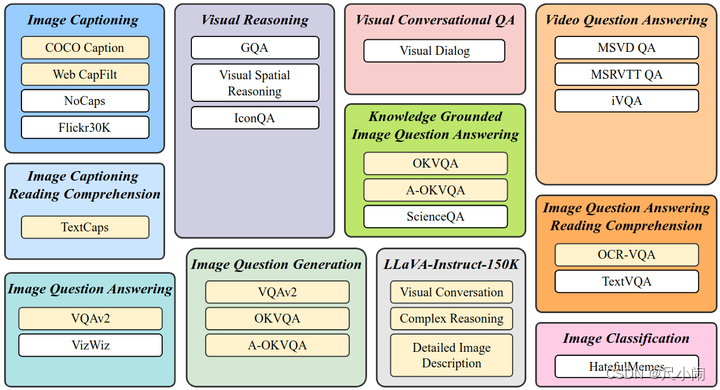
大模型InstructBLIP进行指令微调 一、引言二、InstructBLIP模型介绍三、指令微调训练通用视觉语言模型的应用潜力四、InstructBLIP的指令微调训练步骤五、实验结果与讨论六、结论与展望 一、引言 随着人工智能技术的快速发展,视觉语言模型(Vision-Langu…...

CSS-布局-flex
CSS3 新增了弹性盒子模型( Flexible Box 或 FlexBox ),是一种新的用于在 HTML 页面实现布局的方式。使得 HTML 页面适应不同尺寸的屏幕和不同的设备时,元素是可预测地运行。 基本概念 容器:使用 display:flex 或 display:inline-flex 声明的…...

「C系列」C 数组
文章目录 一、C 数组1. 声明数组2. 初始化数组3. 访问数组元素4. 数组越界5. 多维数组 二、C 操作数组的方法有哪些三、C 数组-应用场景1. 存储固定数量的数据2. 实现算法(如排序)3. 处理数据集合 四、相关链接 一、C 数组 在C语言中,数组是…...

Python框架scrapy有什么天赋异禀
Scrapy框架与一般的爬虫代码之间有几个显著的区别,这些差异主要体现在设计模式、代码结构、执行效率以及可扩展性等方面。下面是一些关键的不同点: 结构化与模块化: Scrapy:提供了高度结构化的框架,包括定义好的Spider…...

【ROS2大白话】四、ROS2非常简单的传参方式
系列文章目录 【ROS2大白话】一、ROS2 humble及cartorgrapher安装 【ROS2大白话】二、turtlebot3安装 【ROS2大白话】三、给turtlebot3安装realsense深度相机 【ROS2大白话】四、ROS2非常简单的传参方式 文章目录 系列文章目录前言一、launch文件传参的demo1. 编写launch.py文…...

浅谈mysql 的批量delete 和 使用in条件批量删除问题
在考虑这两个DELETE语句的性能时,我们需要考虑数据库如何执行这些查询以及它们背后可能涉及的索引和数据结构。 1.执行多个单独的DELETE语句: DELETE FROM a WHERE b 1 AND c 1; ... DELETE FROM a WHERE b 1000 AND c 1000; 这种方法的优点是每…...

【Spring Boot】过滤敏感词的两种实现
文章目录 项目场景前置知识前缀树 实现方式解决方案一:读取敏感词文件生成前缀树构建敏感词过滤器1. 导入敏感词文件 src/main/resources/sensitive_words.txt2. 构建敏感词过滤器 SensitiveFilter3. 测试与使用 解决方案二:使用第三方插件 houbb/sensit…...
吗)
在 Zustand 中管理状态能使用类(Class)吗
在 Zustand 中,通常不推荐使用类(Class)来管理状态,因为 Zustand 的设计理念是基于函数式编程和 React Hooks 的。然而,仍然可以在 Zustand 中间接地使用类,但这并不是 Zustand 的典型用法。 如果确实想要…...

MoreTable 方法selectWithFun,count 使用实例
ORM Bee, example for MoreTable methods:selectWithFun,count ORM Bee时, MoreTable 方法selectWithFun,count 使用实例 package org.teasoft.exam.bee.osql;import org.teasoft.bee.osql.BeeException; import org.teasoft.bee.osql.FunctionType; import org.teasoft.be…...

【SpringBoot】在Spring中使用自定义条件类在Java声明Bean时实现条件注入
在Spring框架中,通过实现org.springframework.context.annotation.Condition接口并重写matches()方法,可以根据自定义条件来控制Bean的注入。这种机制非常灵活,可以帮助开发人员根据环境或配置来有选择地启用或禁用某些Bean。本文将详细介绍如…...

网卡聚合链路配置
创建名为mybond0的绑定,使用示例如下: # nmcli con add type bond con-name mybond0 ifname mybond0 mode active-backup添加从属接口,使用示例如下: # nmcli con add type bond-slave ifname enp3s0 master mybond0要添加其他从…...
PlantSimulation导入cad图作为背景
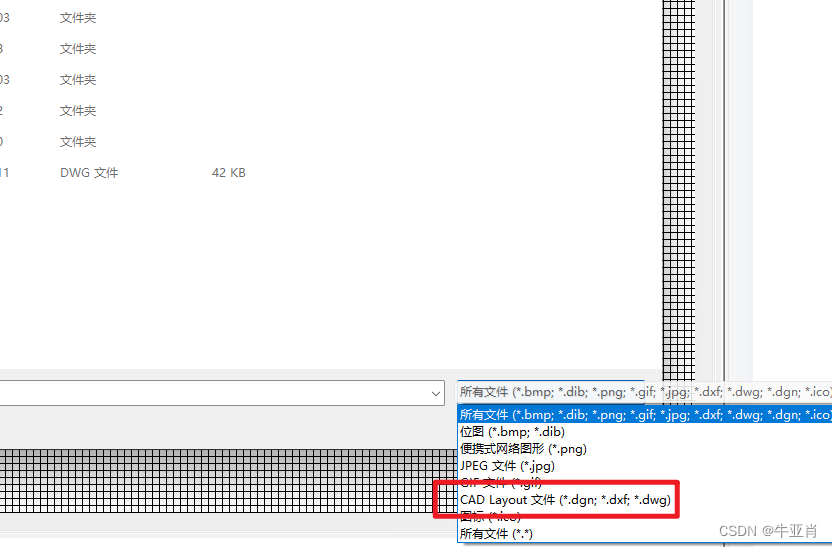
PlantSimulation导入cad图作为背景 首先要整理cad文件,正常的工艺规划总图中存在较多杂乱文件,这些信息是不需要的,如果直接导入,会非常卡。 1、打开cad软件,使用layon命令打开所有的隐藏图层,删除不需要…...

【大模型】个人对大模型选择的见解
选择大模型产品时,需要考虑多个因素,包括但不限于以下几点: 需求匹配度:首先,要明确你的需求是什么。不同的大模型产品可能在功能、性能、应用场景等方面有所侧重。例如,有的模型擅长自然语言处理ÿ…...

java的反射和python的鸭子类型
Java的反射(Reflection)和Python的鸭子类型(Duck Typing)感觉相似但又说不出具体的细节,本文借助kimi试图给出总结。 相似之处: 动态性:Java的反射允许程序在运行时查询、创建和修改类和对象的…...
爬虫工具yt-dlp
yt-dlp是youtube-dlp的一个fork,youtube-dlp曾经也较为活跃,但后来被众多网站屏蔽,于是大家转而在其基础上开发yt-dlp。yt-dlp的github项目地址为:GitHub - yt-dlp/yt-dlp: A feature-rich command-line audio/video downloaderA …...

【代码随想录训练营】【Day 50】【动态规划-9】| Leetcode 198, 213, 337
【代码随想录训练营】【Day 50】【动态规划-9】【需二刷】| Leetcode 198, 213, 337 需强化知识点 需二刷,打家劫舍系列 题目 198. 打家劫舍 class Solution:def rob(self, nums: List[int]) -> int:if len(nums) 1:return nums[0]dp [0] * (len(nums))dp…...
)
源码讲解kafka 如何使用零拷贝技术(zero-copy)
前言 kafka 作为一个高吞吐量的分布式消息系统,广泛应用与实时应用场景中。为了实现高效的数据传输,kafka使用了零拷贝技术(zero-copy)显著提高了性能。本文将详细讲解 Kafka 如何利用零拷贝技术优化数据传输。 什么是零拷贝 零拷贝技术目的是减少数据传输的效率。在传统…...

Ubuntu20.04配置qwen0.5B记录
环境简介 Ubuntu20.04、 NVIDIA-SMI 545.29.06、 Cuda 11.4、 python3.10、 pytorch1.11.0 开始搭建 python环境设置 创建虚拟环境 conda create --name qewn python3.10预安装modelscope和transformers pip install modelscope pip install transformers安装pytorch co…...
【kafka】Golang实现分布式Masscan任务调度系统
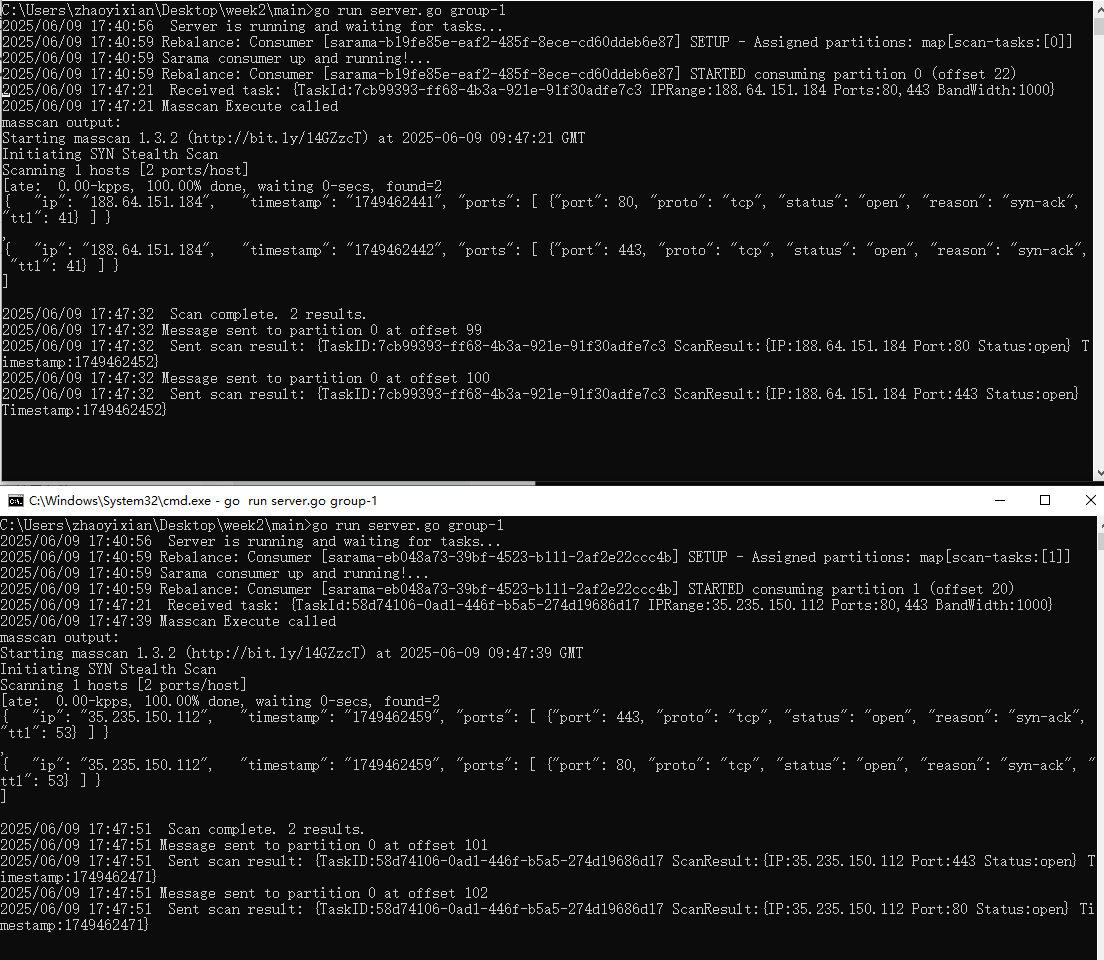
要求: 输出两个程序,一个命令行程序(命令行参数用flag)和一个服务端程序。 命令行程序支持通过命令行参数配置下发IP或IP段、端口、扫描带宽,然后将消息推送到kafka里面。 服务端程序: 从kafka消费者接收…...
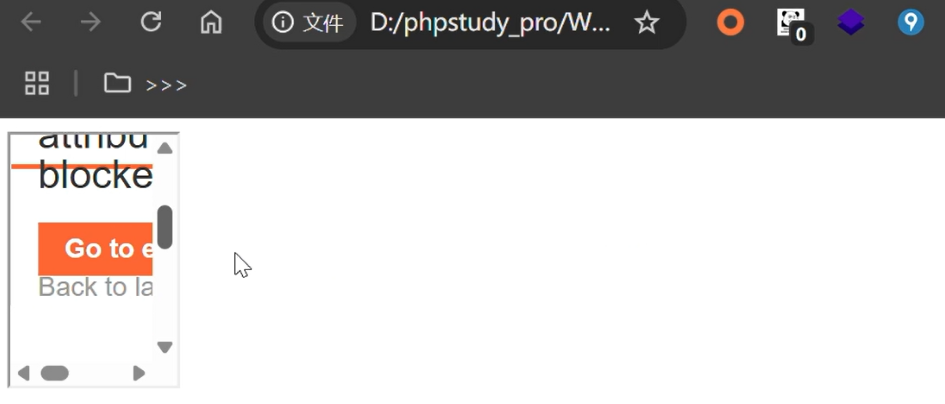
渗透实战PortSwigger靶场-XSS Lab 14:大多数标签和属性被阻止
<script>标签被拦截 我们需要把全部可用的 tag 和 event 进行暴力破解 XSS cheat sheet: https://portswigger.net/web-security/cross-site-scripting/cheat-sheet 通过爆破发现body可以用 再把全部 events 放进去爆破 这些 event 全部可用 <body onres…...

【解密LSTM、GRU如何解决传统RNN梯度消失问题】
解密LSTM与GRU:如何让RNN变得更聪明? 在深度学习的世界里,循环神经网络(RNN)以其卓越的序列数据处理能力广泛应用于自然语言处理、时间序列预测等领域。然而,传统RNN存在的一个严重问题——梯度消失&#…...
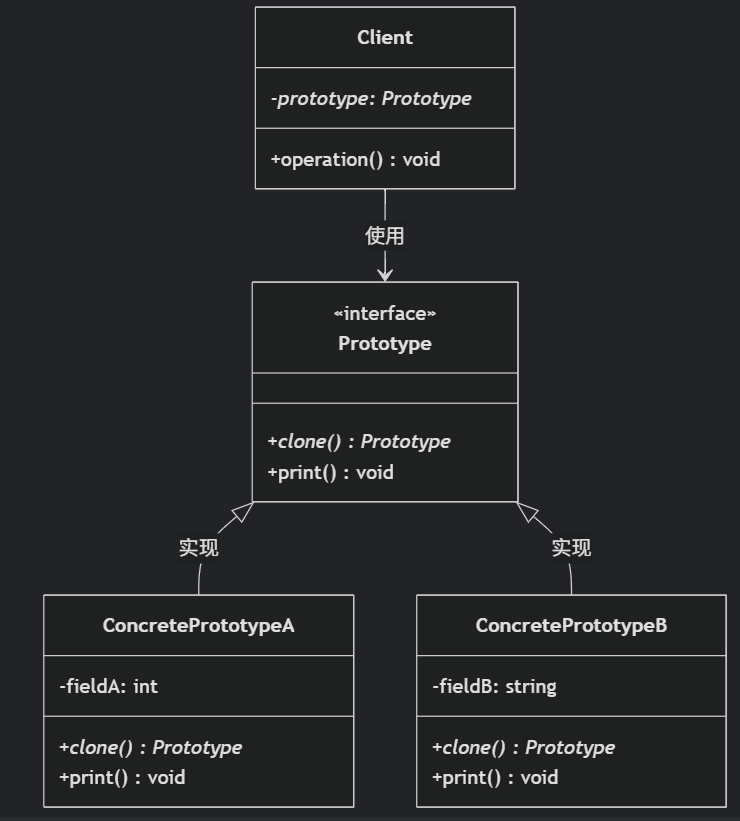
(二)原型模式
原型的功能是将一个已经存在的对象作为源目标,其余对象都是通过这个源目标创建。发挥复制的作用就是原型模式的核心思想。 一、源型模式的定义 原型模式是指第二次创建对象可以通过复制已经存在的原型对象来实现,忽略对象创建过程中的其它细节。 📌 核心特点: 避免重复初…...
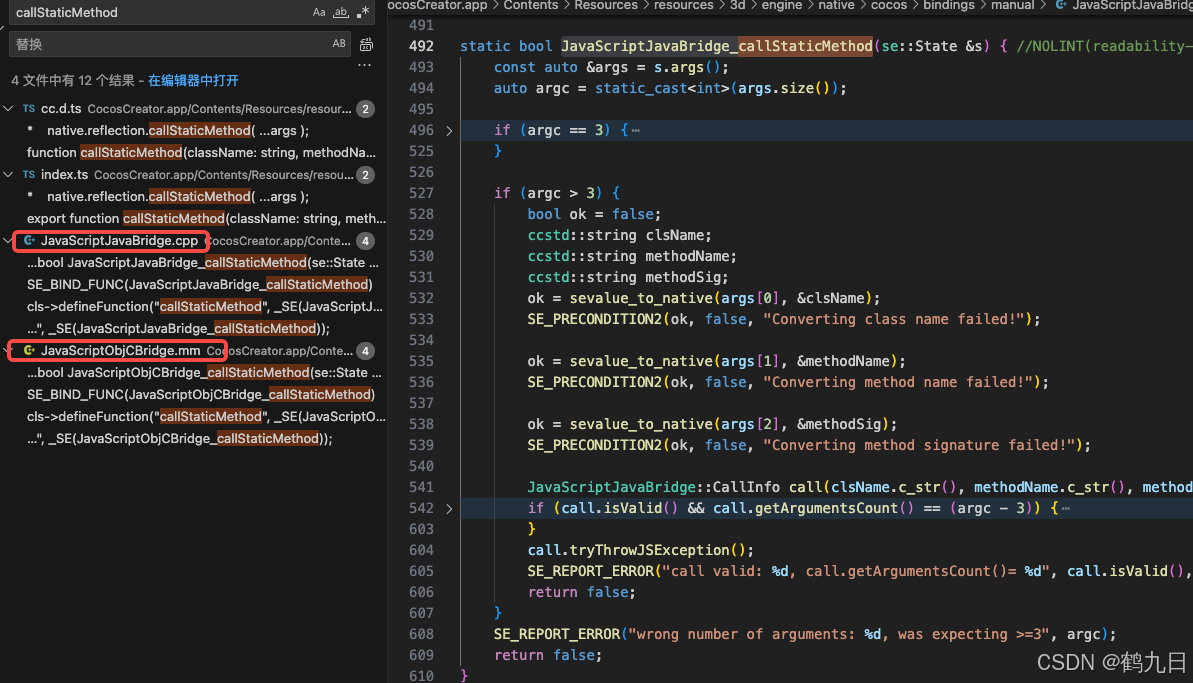
CocosCreator 之 JavaScript/TypeScript和Java的相互交互
引擎版本: 3.8.1 语言: JavaScript/TypeScript、C、Java 环境:Window 参考:Java原生反射机制 您好,我是鹤九日! 回顾 在上篇文章中:CocosCreator Android项目接入UnityAds 广告SDK。 我们简单讲…...
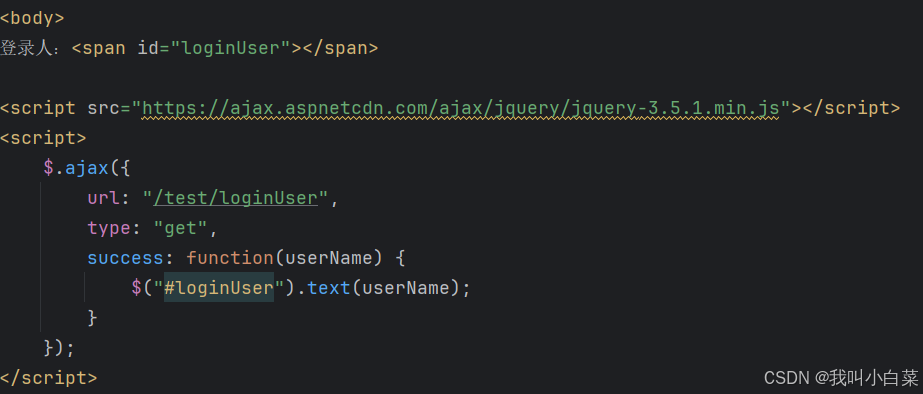
【Java_EE】Spring MVC
目录 Spring Web MVC 编辑注解 RestController RequestMapping RequestParam RequestParam RequestBody PathVariable RequestPart 参数传递 注意事项 编辑参数重命名 RequestParam 编辑编辑传递集合 RequestParam 传递JSON数据 编辑RequestBody …...
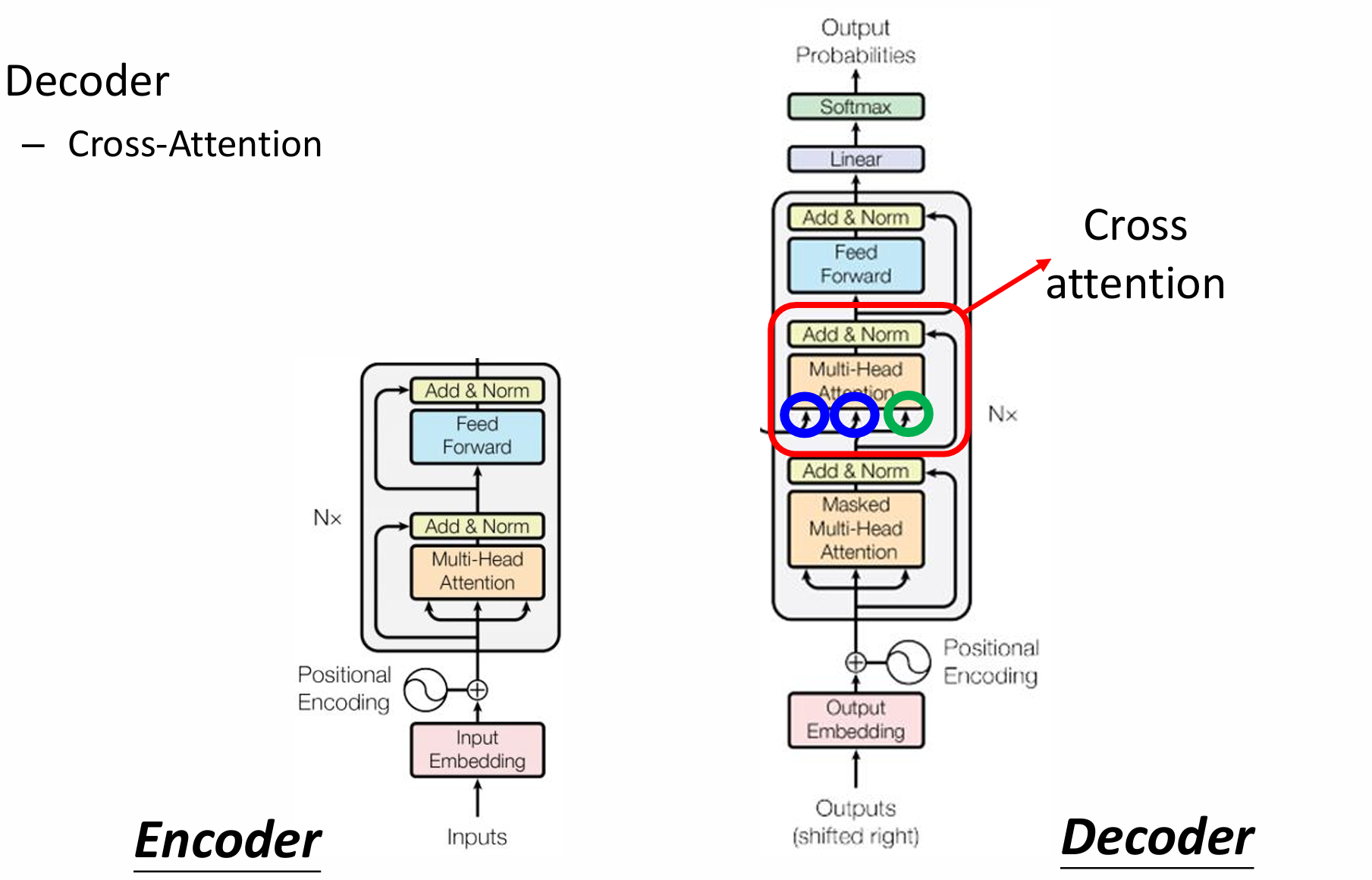
自然语言处理——Transformer
自然语言处理——Transformer 自注意力机制多头注意力机制Transformer 虽然循环神经网络可以对具有序列特性的数据非常有效,它能挖掘数据中的时序信息以及语义信息,但是它有一个很大的缺陷——很难并行化。 我们可以考虑用CNN来替代RNN,但是…...
3-11单元格区域边界定位(End属性)学习笔记
返回一个Range 对象,只读。该对象代表包含源区域的区域上端下端左端右端的最后一个单元格。等同于按键 End 向上键(End(xlUp))、End向下键(End(xlDown))、End向左键(End(xlToLeft)End向右键(End(xlToRight)) 注意:它移动的位置必须是相连的有内容的单元格…...
企业如何增强终端安全?
在数字化转型加速的今天,企业的业务运行越来越依赖于终端设备。从员工的笔记本电脑、智能手机,到工厂里的物联网设备、智能传感器,这些终端构成了企业与外部世界连接的 “神经末梢”。然而,随着远程办公的常态化和设备接入的爆炸式…...
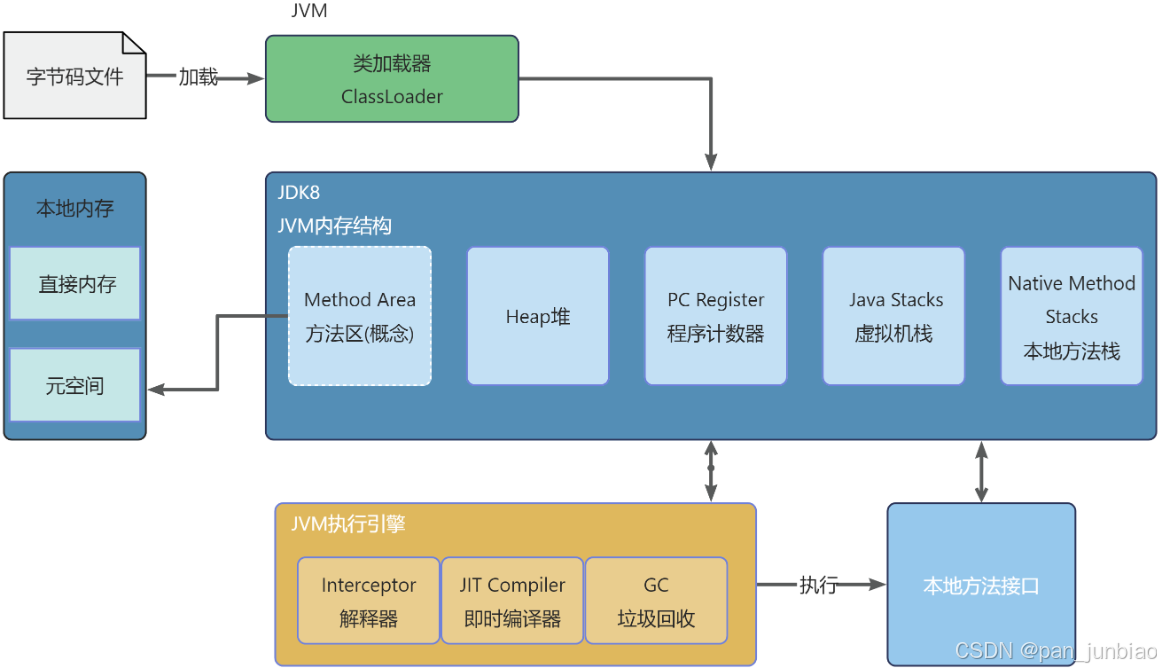
JVM虚拟机:内存结构、垃圾回收、性能优化
1、JVM虚拟机的简介 Java 虚拟机(Java Virtual Machine 简称:JVM)是运行所有 Java 程序的抽象计算机,是 Java 语言的运行环境,实现了 Java 程序的跨平台特性。JVM 屏蔽了与具体操作系统平台相关的信息,使得 Java 程序只需生成在 JVM 上运行的目标代码(字节码),就可以…...